Изобретение относится к области систем автоматического управления и регулирования, стабилизирующих объекты, обеспечивающие наблюдение и прицеливание в комплексах управления огнем и вооружением.
В настоящее время наблюдение и прицеливание на образцах военных гусеничных и колесных машинах обеспечивается совершенными технологическими разработками в областях оптики, электроники, точной механики и информационных технологий, способы же реализации сообщения системе стабилизации позиционирования объекта в пространстве осуществляется в основном следующими способами:
роторно-механический - заключается в способности сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил;
лазерный оптический - посредством измерения угловой скорости в котором используется эффект Саньяка - появление фазового сдвига встречных световых волн во вращающемся кольцевом интерферометре. Два луча генерируются в резонаторе лазерного гироскопа и, если прибор вращается, то происходит генерация волн разной частоты для разных направлений из-за различной длины резонатора для разных направлений обхода, вызванной вращением;
Самым распространенным является роторно-механический способ, так как системы стабилизации на его свойствах являлись первыми, примененными в практике, как не требующие высоких технологий производства сообразно времени разработки при высокой точности регулирования и качества стабилизации, но изначально имел неустранимые, ввиду конструктивного устройства приборов и систем в которых данный способ реализован:
большие массогабаритные размеры;
длительное время выхода в рабочий режим;
высокая культура с задействованием ручного труда и как следствие сложность и дороговизна производства;
Второй способ получил развитие и широкое внедрение в последние тридцать лет благодаря развитию научно-технического прогресса и технологий производства, имеет малое время запуска, обеспечивает высокую точность и качество стабилизации, но также имеет определенные недостатки приборов и систем в которых данный способ реализован:
большие массогабаритные размеры:
непременные условия бережной эксплуатации,
необходимость регулярной настройки и юстировки с объектом регулирования;
высокая стоимость комплектующих и сборки.
Вышеперечисленные способы, предназначенны для повышения эффективности ведения наблюдения в приборах, основной задачей которых является сохранение постоянного направления оптической оси вне зависимости от перемещений и колебаний самого объекта на котором они установлены и в основном отвечают предъявляемым к ним требованиям, однако вышеперечисленные недостатки определяют необходимость поиска новых способов стабилизации полей зрения приборов наблюдения и прицеливания устанавливаемых на современных военных гусеничных и колесных машинах.
Данные решения реализованы в предлагаемом способе электронной стабилизации полей зрения приборов наблюдения и прицеливания военных гусеничных и колесных машин.
Сущность способа заключатся в следующем:
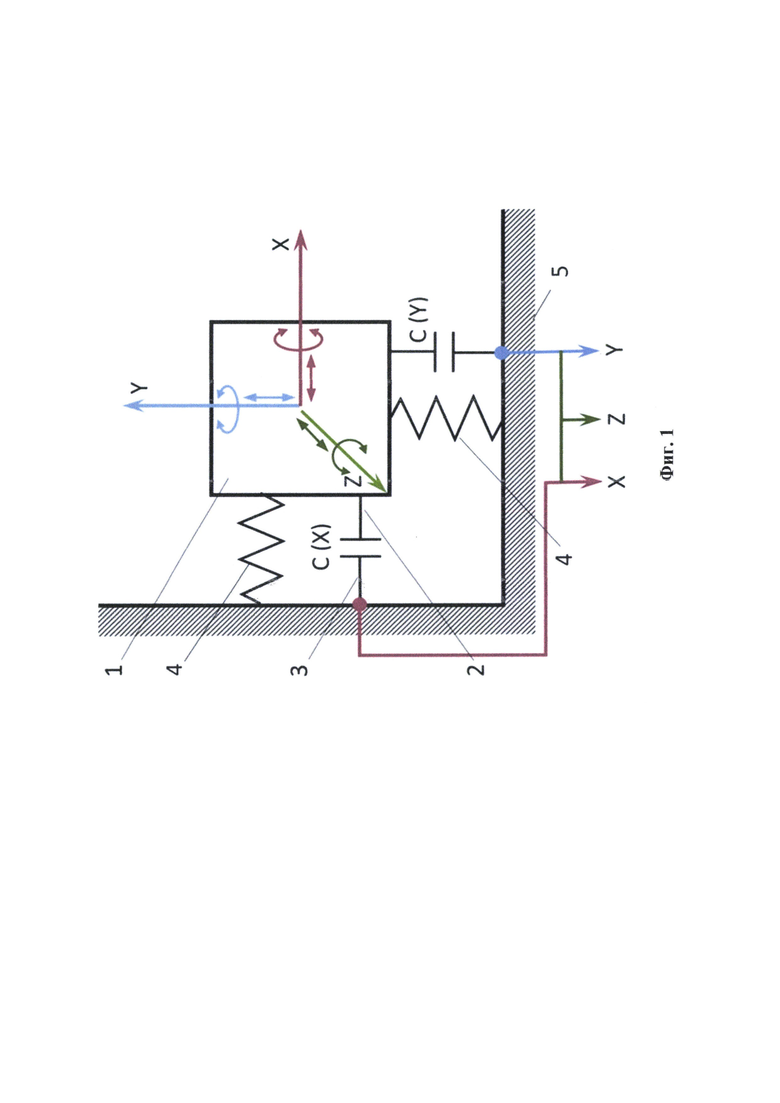
Процесс стабилизации объекта регулирования - прибора наблюдения и/или прицеливания базируется на физических принципах воздействия силы земного притяжения на микроэлектромеханический сенсор (фиг. 1). Принцип работы такого сенсора основан на преобразовании в электрический сигнал дифференциальной емкости конденсаторов С(Х) и C(Y) соответствующих осей координат, образуемой при перемещении рабочего твердого тела 1 подвижными 2 и неподвижными микромеханическими пластинами 3 гребенчатой формы. Изменение емкости происходит под действием силы Кориолиса на рабочее твердое тело, находящееся на подвесах 4 внутри корпуса 5 и позволяет оценить амплитудные значения указанных воздействий. Электрический сигнал оси Z по совокупному изменению емкостей С(Х) и C(Y).
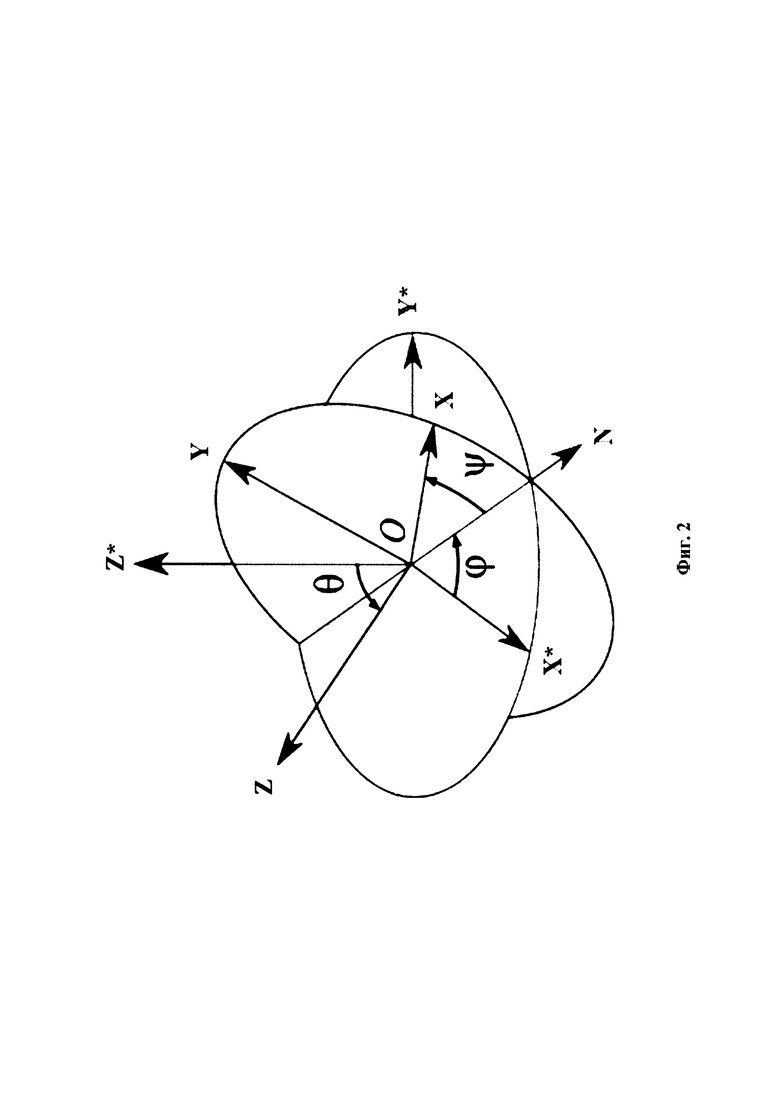
Математическое описание работы микроэлектромеханического сенсора (фиг. 2), положенного в основу предложенного способа заключается в следующем:
Классическими независимыми параметрами, позволяющими однозначно задать угловое положение твердого тела, являются углы Эйлера - Крылова: курс - ϕ, крен - ψ, тангаж - θ. Положительные значения углов отсчитываются против хода часовой стрелки, а итоговое угловое положение объекта в приведенной глобальной системе координат задается в соответствии с последовательностью поворотов ϕ→θ→ψ.
Зная значения углов Эйлера - Крылова в текущий дискретный момент времени (ϕi; ψi; θi)Т и вектор угловых скоростей вращения  в неподвижной глобальной системе координат OX*Y*Z*, в соответствии с теорией инерциальной навигации можно новые координаты в момент времени (i+1):
в неподвижной глобальной системе координат OX*Y*Z*, в соответствии с теорией инерциальной навигации можно новые координаты в момент времени (i+1):

где T - интервал времени между моментами i и (i+1).
Поскольку MEMS гироскоп выдает угловые скорости вращения (wz, wy, wx)T вокруг осей связанной с ним подвижной, а не глобальной системы координат, для вычисления необходимо выполнить функциональное преобразование

Положительные направления вращения микроэлектромеханического сенсора относительно осей X* и Z* отсчитываются, как правило, против часовой стрелки.
Вариантом преобразования является применение математического аппарата аффинных преобразований и использование в качестве функционала Ф{-} выражения

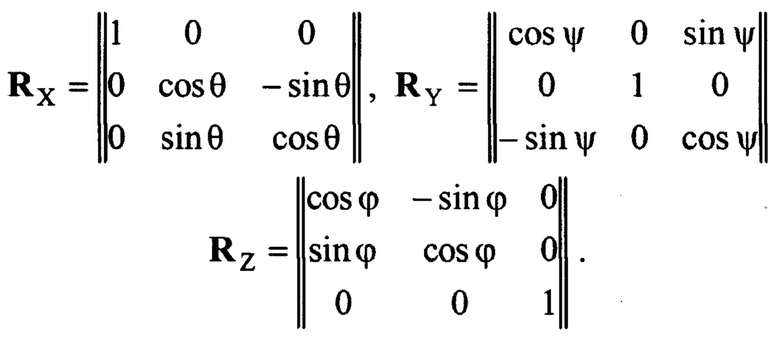
где RZXY=RZRXRY - матрица поворота в трехмерном (3D) пространстве, обладающая свойством ортогональности, т.е. RZXYRZXYT=Е, где Е - единичная матрица, и RZXY-1=RZXYT, что позволяет заменить вычислительно емкую процедуру обращения транспонированием. Также для матрицы RZXY (как и для матриц RZ, RY, RX) выполняется равенство det[RZXY]=1, т.е. соблюдается условие ортогональности осей подвижной системы координат. Следует учитывать, что произведение матриц поворота некоммутативно, т.е. RXRY≠RYRX, и результат зависит от последовательности поворотов вокруг каждой из осей.
Поскольку тройка векторов, образуемых осями X, Y и Z на фиг. 2 является правой, то матрицы поворота RX, RY и RZ соответственно имеют вид:
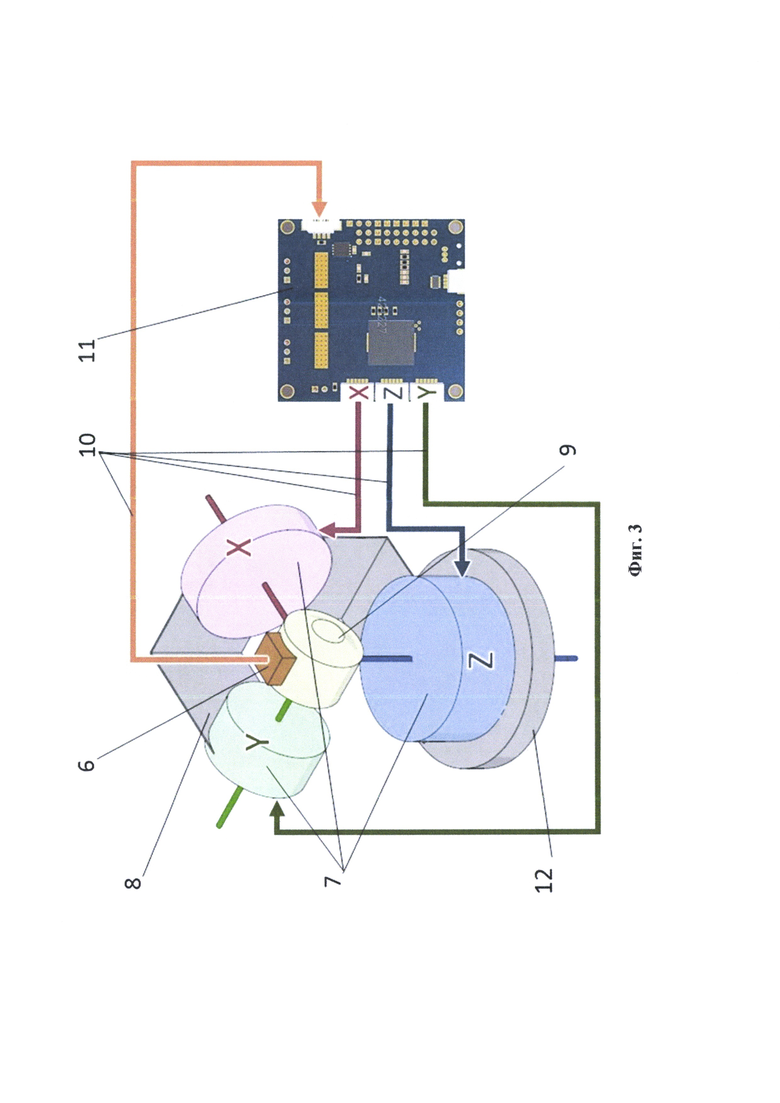
Стабилизация положения объекта регулирования в пространстве реализуется за счет того, что расположенный на объекте регулирования 9 микроэлектромеханический сенсор 6, показанный на фиг. 3 являясь датчиком негативной обратной связи для системы исполнительных приводов 7 размещенных в кардановом подвесе 8 закрепленном на платформе 12 и осуществляющих осевое перемещение объекта регулирования 9 (прибора наблюдения и прицеливания) в противоположном внешнему воздействию (движения военной гусеничной и колесной машины) направлении, тем самым стремясь придать объекту регулирования 6 исходное положение посредством предлагаемого способа его стабилизации. Выработку управляющих сигналов 10 для исполнительных приводов осуществляет микропроцессорная схема 11, источником исходных сигналов для которой является микроэлектромеханический сенсор 6.
Так же, применение данного способа возможно и при размещении сенсора 6 не на объекте регулирования 9, а на платформе 12, при условии, что при таком конструктивном размещении обратная связь для исполнительных приводов будет позитивной.
Такое конструктивное размещение упрощает конструкцию, но снижает точность регулирования, по причине его косвенной отработки, так как непосредственной связи с объектом регулирования 6 уже не будет.
Аналогом предлагаемой разработки является способ наблюдения объектов с дистанционного пилотируемого летательного аппарата (Патент № RU 2279999 С2, МПК B64D 47/08. Авторы: Чистяков Николай Валерьевич Общество с ограниченной ответственностью «Новик-XXI век». Опубликовано: 20.07.2006). Изобретение относится к системам наблюдения с телевизионным каналом, аналогичным используемому в предложенном способе.
Близким предлагаемому устройству является микроэлектромеханическая система для датчика угловой скорости (Патент № SU 2580879 С2 Автор(ы): Киттисланн Ермуни, Лападу Даниэль, Якобсен Сиссель. «Сенсонор АС». Опубликовано: 10.04.2016). Изобретение относится к измерению угловой скорости. Более конкретно, изобретение относится к полностью симметричной микроэлектромеханической системе (МЭМС).
В качестве прототипа выбрано изобретение устойчивого к механическим ударам узел МЭМС-акселерометра и связанные с ним способ, устройство, система. (Патент № RU 2673777 С2. Авторы: Чау Альберт В., Мерсер Джон Е., Филлипс Скотт и Мерлин текнолоджи инк. Опубликовано 29.11.2018). Изобретение относится к МЭМС-акселерометрам, имеющим повышенную устойчивость к механическим ударам.
Недостатки прототипа объясняются следующим:
В прототипе для достижения устойчивости системы стабилизации объекта регулирования применяется метод количественного увеличения МЭМС-акселерометров в целях их взаимной компенсации статических и динамических ошибок, что усложняет конструкцию, увеличивает ее себестоимость и массогабаритные показатели. В предлагаемом способе задачи по нивелированию паразитных колебаний, статических и динамических ошибок применен программный фильтр, описанный в математической модели предложенного способа.
Таким образом предложенный способ электронной стабилизации полей зрения приборов наблюдения и прицеливания военных гусеничных и колесных машин позволяет решить ряд ключевых проблем, имеющихся у существующих за счет таких преимуществ как:
1. Посредством применения компактного микроэлектромеханического датчика исключается возможность возникновения механических поломок роторного гироскопа, применяемого в соответствующем способе стабилизации;
2. Значительно увеличивается технологичность производства систем, реализующих стабилизацию, за счет применения современных технологий изготовления SMD и MEMS структур
3. Перспектива дальнейшей разработки способа в направлении его возможного использования в качестве принципиальной основы для систем автоматического управления и регулирования более тяжелыми системами, в частности комплексами вооружения;
4. Отсутствие необходимости в сложном и квалифицированном использовании, обслуживания и ремонте, т.к. в случае выхода из строя системы в которой применяется предложенный способ, ввиду ее компактности и невысокой стоимости, она может быть полностью заменена на исправную без производства ремонта
Предложенный способ перспективен в расширении диапазона областей его использования в качестве способа применяемого в компактных и высокотехнологичных конструкция система автоматического управления и регулирования различного назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СФЕРОПАНОРАМНОГО ПОЛЯ ЗРЕНИЯ ПРИБОРОВ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2020 |
|
RU2740472C2 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| КООРДИНАТОР ГОЛОВКИ САМОНАВЕДЕНИЯ | 2016 |
|
RU2644991C1 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Способ цифрового динамического контроля аналоговых систем электрооборудования вооружения, военной и специальной техники | 2023 |
|
RU2838129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2650789C2 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
Изобретение относится к области автоматического управления и регулирования приборов наблюдения и прицеливания и касается способа электронной стабилизации полей зрения приборов наблюдения и прицеливания военных гусеничных и колесных машин. Способ заключается в определении пространственного положения объекта, обеспечивающего отображение поля зрения, посредством преобразования в электрический сигнал дифференциальной емкости конденсаторов, образуемой при перемещении рабочего твердого тела подвижными и неподвижными микромеханическими пластинами гребенчатой формы микроэлектромеханического сенсора, закрепленного на объекте, обеспечивающем отображение поля зрения. Полученные данные передаются на микропроцессорную схему, которая вырабатывает управляющие сигналы для системы исполнительных приводов, размещенных в кардановом подвесе и осуществляющих перемещение объекта в соответствии с управляющими сигналами. Технический результат заключается в упрощении и повышении надежности способа стабилизации. 3 ил.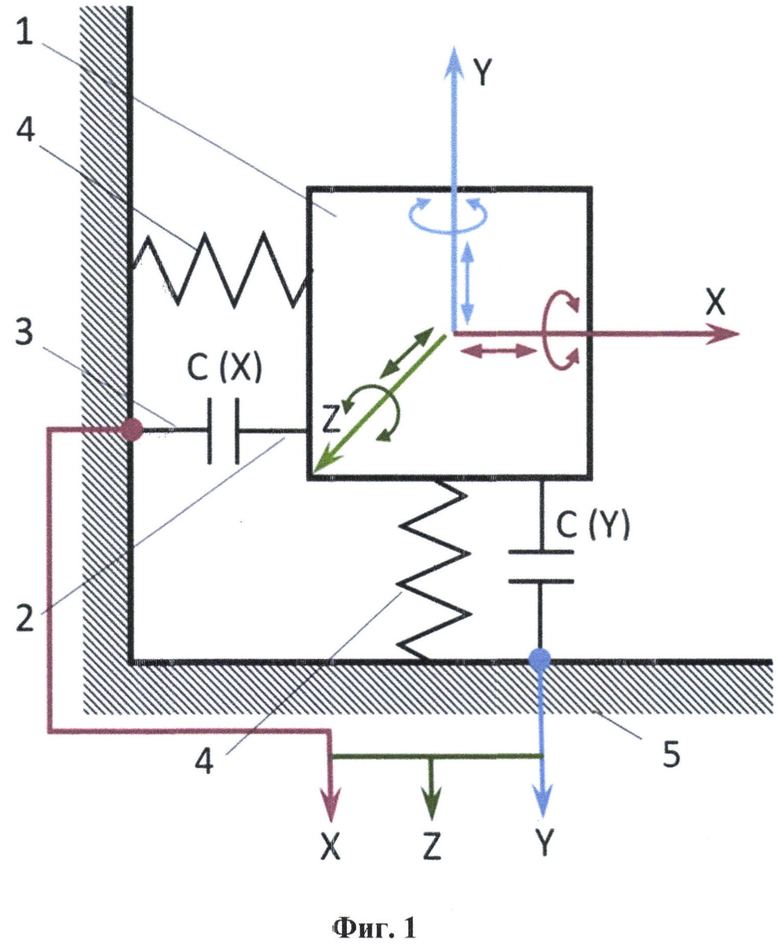
Способ электронной стабилизации полей зрения приборов наблюдения и прицеливания военных гусеничных и колесных машин, включающий определение пространственного положения объекта, обеспечивающего отображение поля зрения, посредством преобразования в электрический сигнал дифференциальной емкости конденсаторов, образуемой при перемещении рабочего твердого тела подвижными и неподвижными микромеханическими пластинами гребенчатой формы микроэлектромеханического сенсора, закрепленного на объекте, обеспечивающем отображение поля зрения, и являющегося датчиком негативной обратной связи для системы стабилизации, передачу полученных данных на микропроцессорную схему и выработку микропроцессорной схемой управляющих сигналов для системы исполнительных приводов, размещенных в кардановом подвесе и осуществляющих перемещение объекта, обеспечивающего отображение поля зрения, в противоположном внешнему воздействию направлении в соответствии с управляющими сигналами в целях обеспечения его стабилизированного положения.
| Импульсный индикатор для пожарной сигнализации | 1930 |
|
SU29390A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2009 |
|
RU2414732C1 |
| US 9864061 B2, 09.01.2018 | |||
| US 6596976 B2, 22.07.2003. | |||

