Настоящее изобретение касается аэронавигационного устройства с инерционными датчиками и радионавигационными приемниками, а также способа аэронавигации, использующего такие элементы.
Из европейского патента 1 326 153 известен аэронавигационный прибор, в основном содержащий первичную навигационную систему, инерционные датчики которой выполнены на основе микродатчиков (широко известных под названием MEMS (микроэлектромеханическая система)) и устройство позиционирования которой является приемником GPS, и резервную гиролазерную навигационную систему.
Для обеспечения автономной навигации, то есть с использованием только данных инерционных датчиков, особенно для дальних полетов, необходимо, чтобы отклонение показаний используемых гирометров было меньше 0,01°/час. Характеристика этого класса необходима также для достижения требуемой курсовой точности. Однако современные MEMS-датчики далеки от обеспечения таких характеристик (обычно они составляют порядка от 0,1°/час до 1°/час). Классические инерционные датчики, которые могут достигать таких характеристик, являются очень дорогими, тяжелыми и громоздкими, и их MTBF (среднее время между двумя отказами) является относительно коротким (обычно 35.000 часов для гиролазеров). Оптоволоконные FOG-гирометры существенно улучшают эту ситуацию, однако остаются очень дорогими.
Объектом настоящего изобретения является аэронавигационное устройство с инерционными датчиками и радионавигационными приемниками, которое является по возможности максимально дешевым, обеспечивая при этом требуемую курсовую точность, и инерционные датчики которого характеризуются более длительным MTBF по сравнению с классическими датчиками и могут быть расположены в местах, наиболее благоприятных для их работы в подвижном средстве, которое они оборудуют.
Объектом настоящего изобретения является также способ аэронавигации, позволяющий применять это устройство, и который является минимально затратным.
Аэронавигационное устройство с инерционными датчиками и радионавигационными приемниками в соответствии с настоящим изобретением отличается тем, что в двух из трех каналов инерционные блоки измерения принадлежат к MEMS с «низкими характеристиками» с гирометрами класса примерно от 1°/час до 10°/час, а третий канал содержит инерционный блок измерения, характеристики которого соответствуют норме ARINC 738.
Согласно предпочтительному варианту выполнения его радионавигационные приемники являются приемниками, работающими с несколькими созвездиями, и их выходы соединены с устройствами гибридизации, соединенными также с инерционными датчиками.
Способ в соответствии с настоящим изобретением отличается тем, что он состоит в приеме радионавигационных сигналов, по меньшей мере, от двух разных созвездий спутников позиционирования и осуществляет гибридизацию их с данными, поступающими от инерционных датчиков с «низкими характеристиками» (с гирометрами класса примерно от 1°/час до 10°/час).
Настоящее изобретение будет более очевидно из нижеследующего подробного описания варианта выполнения, представленного в качестве не ограничительного примера, со ссылками на прилагаемый чертеж, на которых:
Фиг. 1 и 2 - упрощенные блок-схемы соответственно первого варианта выполнения навигационного устройства в соответствии с настоящим изобретением и версии этого первого варианта выполнения.
Фиг. 3 и 4 - упрощенные блок-схемы соответственно второго варианта выполнения навигационного устройства в соответствии с настоящим изобретением и версии этого второго варианта выполнения.
Фиг. 5 - блок-схема примера установки части элементов устройства в соответствии с настоящим изобретением на этажерке радиоэлектронного оборудования.
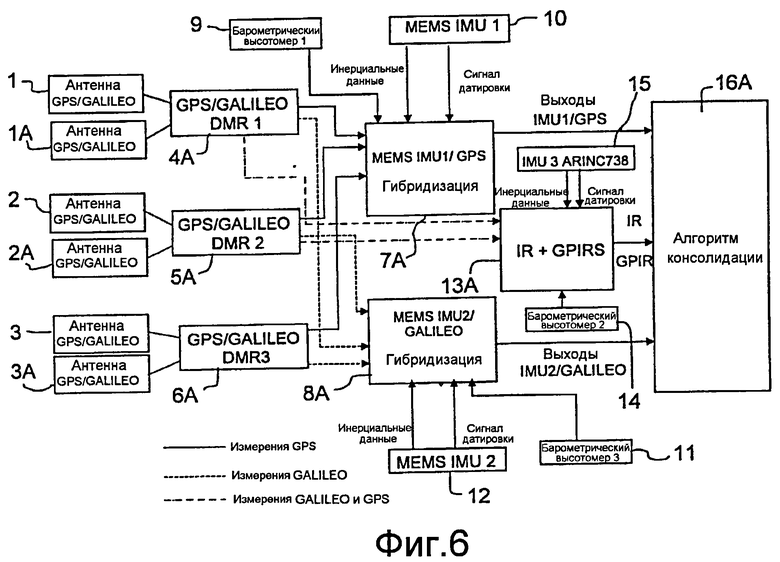
Фиг. 6 - блок-схема версии с двумя антеннами варианта выполнения, показанного на фиг. 1.
Описанное ниже устройство в соответствии с настоящим изобретением предназначено для использования на борту летательного аппарата, но, разумеется, его использование не ограничивается представленным вариантом, и его можно применять на других подвижных средствах.
Как было указано выше, современные системы инерционных датчиков, хотя и являются достаточно эффективными для чисто инерциальной навигации и удержания курса летательного аппарата во время длительных полетов (например, более нескольких часов), все же являются тяжелыми, громоздкими и очень дорогими. Что же касается датчиков типа MEMS, то они не имеют этих недостатков, однако временное отклонение их показаний не позволяет использовать их для чисто инерциальной навигации и для удержания курса с достаточной точностью свыше промежутка времени более одного или двух часов (в лучшем случае).
Чтобы достичь компромисса между этими противоречивыми характеристиками и наилучшим образом использовать предпочтительные качества MEMS-датчиков, настоящим изобретением предлагается комбинировать данные, поступающие от MEMS-датчиков, с информацией, поступающей, по меньшей мере, от двух радионавигационных систем. Это комбинирование в основном состоит в гибридизации этих двух видов данных. Действительно, хотя в настоящее время существуют только два созвездия спутников, обслуживающих навигацию (GPS и GLONASS, причем последнее пока является недоступным для этих целей), вскоре появится созвездие спутников GALILEO, а позже, возможно, одно или несколько других созвездий.
Комбинация средств в соответствии с настоящим изобретением в основном состоит в «гибридизации» по известной технологии данных, поступающих, по меньшей мере, от двух радионавигационных приемников, связанных с разными спутниковыми созвездиями, с данными, выдаваемыми инерционным блоком измерения (IMU на английском языке), содержащем три акселерометра и три гирометра на основе MEMS-компонентов.
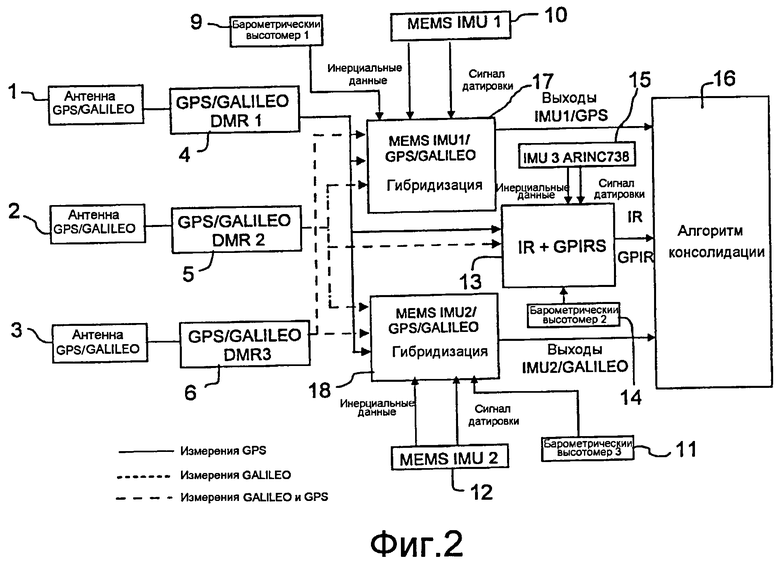
Вариант выполнения аэронавигационного устройства, показанный на фиг. 1, содержит три антенны 1-3, работающие с двумя созвездиями, и соответственно соединенные каждая с приемником, работающим с двумя созвездиями (называемым также на английском языке DMR, то есть Dual Mode Receiver), и эти приемники обозначены соответственно позициями 4-6. Таким образом, как и в других описанных ниже вариантах выполнения, получают резервированную «триплексную» (трехканальную) архитектуру. В настоящем примере эти созвездия спутников позиционирования являются созвездиями GPS и будущей системой GALILEO, но, разумеется, изобретение не ограничивается этими двумя созвездиями и может использовать более двух созвездий, и этими созвездиями могут быть вышеуказанные и/или другие созвездия при условии, что они будут в наличии и будут надежными. В этом варианте выполнения каждый из приемников DMR соединен с антенной, выполненной с возможностью приема сигналов одновременно от GPS и от GALILEO. Предпочтительно каждый из приемников DMR соединен с отдельной антенной, и антенны отстоят друг от друга на достаточное расстояние вдоль продольной оси летательного аппарата, чтобы позволять извлекать курс этого летательного аппарата при помощи известной обработки по двум антеннам. Приемники DMR синхронизированы между собой (при помощи общего хронирующего устройства, которое позволяет синхронно получать измерения) с целью обеспечения обработки по двум антеннам вне приемника DMR и предпочтительно в процессоре, осуществляющем вычисления гибридизации между измерениями блоков IMU с MEMS-датчиками и измерениями GPS или GALILEO. В этой конфигурации каждый приемник соединен только с одной антенной, но каждое устройство гибридизации соединено, по меньшей мере, с двумя синхронизированными приемниками и получает, таким образом, информацию, по меньшей мере, от двух антенн.
Выходы измерения GPS каждого из трех приемников 4-6 соединены с первой схемой 7 гибридизации, а их выходы измерения GALILEO соединены со второй схемой 8 гибридизации. Кроме того, схема 7 получает данные от барометрического высотомера 9 и инерциальные данные и сигнал датировки от блока IMU 10 с тремя акселерометрами и тремя гирометрами (не показаны) типа MEMS. Точно так же схема 8 получает данные от барометрического высотомера 11 и инерциальные данные и сигнал датировки от блока IMU 12 с тремя акселерометрами и тремя гирометрами (не показаны) типа MEMS. MEMS-датчики могут быть датчиками с «низкими характеристиками» с гирометрами класса от 1°/час до 10°/час.
Выходы измерения GPS и GALILEO двух из трех приемников 4-6, например приемников 4 и 5, соединены с третьей схемой 13 гибридизации. Кроме того, схема 13 получает данные от третьего барометрического высотомера 14 и инерциальные данные и сигнал датировки от блока IMU 15. Данные, поступающие от каждого из барометрических высотомеров 9, 11 и 14 являются независимыми от эквивалентных данных на других каналах. В отличие от блоков IMU 10 и 12, блок IMU 15 не содержит MEMS-датчиков, а акселерометры и гирометры класса приборов, которыми оборудованы современные гражданские инерционные блоки измерения, называемые ADIRU (блоки ADIRU являются блоками “Air Data Inertial Reference Unit”, содержащими блок UMI, вычислительную плату и блок воздушных данных “Air Data”), и позволяют получить характеристики, отвечающие требованиям нормы ARINC 738, благодаря классической барометрической инерциальной автоматической системе, известной под названием автоматизация Шулера. Обычно порядок величины гирометрических отклонений составляет 0,01°/час и порядок акселерометрических отклонений составляет 100 µg, но, разумеется, эти характеристики могут быть лучше. Если частота отказов блока UMI 15 не является достаточно низкой, чтобы отвечать необходимым требованиям, может возникнуть необходимость в добавлении второго блока UMI этого же типа. Это добавление ничего не меняет в сущности изобретения.
Измерения, выдаваемые тремя схемами гибридизации, консолидируются затем устройством 16 консолидации, применяющим известный алгоритм консолидации.
Описанное выше устройство может работать как с блоками UMI с MEMS с так называемыми «низкими характеристиками» (оборудованными гирометрами класса 1°/час-10°/час), так и с блоками UMI с MEMS с так называемыми «высокими характеристиками» (классом выше 0,1°/час) за счет гибридизации инерциальных данных с радионавигационными данными, поступающими, по меньшей мере, от двух разных спутниковых созвездий.
Согласно варианту устройства, показанному на фиг. 1 блок UMI 15 типа ARINC 738 заменен блоком ADIRU или двумя блоками ADIRU (если частота отказов одного ADIRU слишком высока).
В других описанных ниже вариантах выполнения одинаковые элементы обозначены одинаковыми позициями.
Вариант выполнения, показанный на фиг. 2, который является версией варианта, показанного на фиг. 1, отличается от последнего тем, что две первые схемы 17, 18 гибридизации (заменяющие соответственно схемы 7 и 8) являются идентичными, и обе принимают радионавигационные данные, связанные, по меньшей мере, с двумя созвездиями, GPS и GALILEO в представленном примере, по трем каналам приема, и тем, что третье устройство 13 гибридизации принимает радионавигационные данные, связанные, по меньшей мере, с двумя созвездиями, GPS и GALILEO в представленном примере, по двум из трех каналов приема. Гибридизация инерциальных данных, поступающих от MEMS-датчиков, с радионавигационными данными от, по меньшей мере, двух созвездий облегчает применение алгоритма “FDE” (“Fault Detection and Exclusion”, то есть обнаружение и исключение неисправного созвездия), который защищает навигационное устройство от не обнаруженных отказов созвездий.
Согласно другой версии устройства, показанного на фиг. 1, схематично показанной на фиг. 6, в случае использования MEMS с низкими характеристиками каждый из приемников DMR соединяют с двумя антеннами, которые могут одновременно принимать сигналы GPS и GALILEO. Эти две антенны отстоят друг от друга вдоль продольной оси летательного аппарата на расстояние, достаточное, чтобы извлекать информацию о курсе летательного аппарата из сигналов GPS и/или GALILEO. Это выделение может происходить в каждом приемнике DMR или за пределами этих приемников при помощи специального вычислительного устройства. Вместе с тем это решение требует наличия двух входов ВЧ для каждого приемника DMR. На фиг. 6 позициями 1А-3А обозначены три дополнительные антенны. Элементы 4А-8А, 13А и 16А соответствуют элементам 4-8, 13 и 16, и их функции слегка изменены по сравнению с функциями соответствующих элементов на фиг. 1 с учетом измерения курса при помощи двух антенн каждого канала.
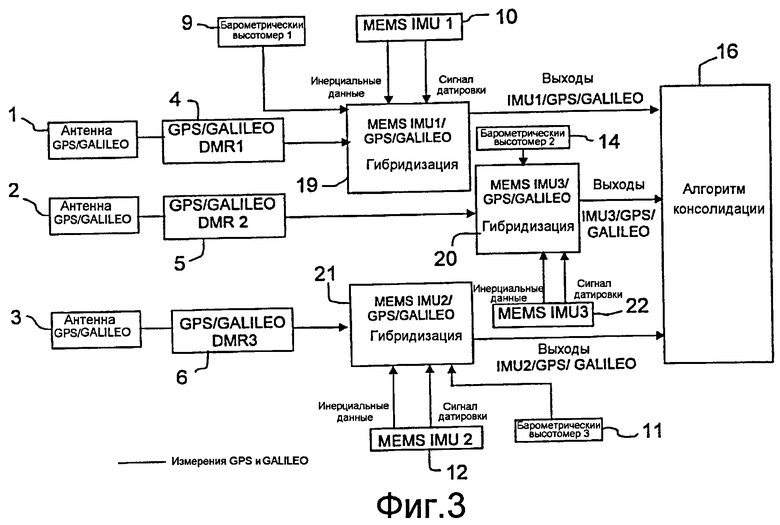
В варианте выполнения, показанном на фиг. 3, три схемы 19-21 гибридизации соединены каждая только с одним радионавигационным каналом приема (содержащим соответственно антенны и приемники 1 и 4, 2 и 5, 3 и 6), с одним блоком IMU (соответственно 10, 22 и 21) с MEMS, причем эти блоки IMU идентичны, и с барометрическим высотомером (соответственно 9, 14 и 11). Таким образом, каждая из этих трех схем 19-21 осуществляет гибридизацию инерциальных данных с радионавигационными измерениями, поступающими, по меньшей мере, от двух спутниковых созвездий одновременно. Измерения, производимые тремя схемами 19-21, консолидируются так же, как и в случае, представленном на фиг. 1, устройством 16. Как и в предыдущем случае, данные, выдаваемые каждым из барометрических высотомеров 9, 11 и 12, являются независимыми от эквивалентных данных других каналов.
Вариант, показанный на фиг. 3, предназначен для работы с блоками UMI с MEMS с так называемыми «высокими характеристиками», то есть гирометры которых имеют класс выше 0,1°/час. Преимуществом этого варианта выполнения является возможность уменьшения числа или снижения сложности радионавигационных приемников по сравнению с предыдущими вариантами выполнения. Это становится возможным благодаря использованию автономных гирокомпасов, позволяющих отказаться от измерения курса при помощи двух антенн, соединенных с каждым радионавигационным приемником.
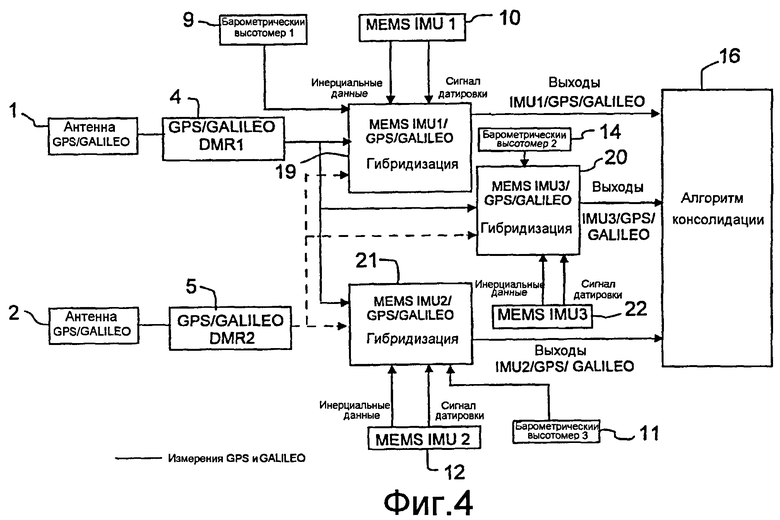
На фиг. 4 показана версия устройства, представленного на фиг. 3. Отличие состоит в том, что устройство, показанное на фиг. 4, содержит только два радионавигационных канала приема (антенны и приемники 1, 4 и 2, 5), каждый из которых соединен с тремя устройствами 19, 20 и 21 гибридизации. Однако эта версия не столь предпочтительна, как вариант, показанный на фиг. 3, если существует необходимость сохранения более высоких показателей надежности (с учетом возможного не обнаруженного отказа оборудования).
В вариантах выполнения, показанных на фиг. 1-4, измерения, поступающие от спутниковых навигационных систем (в данном случае GPS и GALILEO), являются либо данными о положении и скорости, определяемыми в географических координатах, либо необработанными псевдоизмерениями (псевдорасстояниями и псевдоскоростями), получаемыми в системе координат спутников, либо результатами корреляции сигнала, принятого каждой антенной летательного аппарата, с кодами, вырабатываемыми локально в радионавигационных приемниках. Эти результаты корреляции обычно обозначают I и Q.
Соответствующие технологии гибридизации, применяемые в рамках изобретения, известны в литературе под названиями неплотной гибридизации, плотной гибридизации и сверхплотной гибридизации. Как правило, их используют при помощи расширенных фильтров Кальмана, однако в рамках изобретения можно также применять нелинейные технологии, использующие фильтры, называемые “Unscented Kalman Filter”, партикулярные фильтры или, в целом, байесовские фильтры.
Алгоритмы гибридизации, применяемые в рамках изобретения, позволяют контролировать целостность измерений по отношению к не обнаруженным отказам используемого спутникового созвездия (GPS и/или GALILEO), если целостность этого созвездия не достаточна относительно требуемой общей целостности для измеряемой выходной переменной величины, и, в частности, когда она является составной частью первичных переменных. В устройстве в соответствии с настоящим изобретением каждая выходная переменная сопровождается радиусом защиты по отношению к не обнаруженным отказам спутников. Это значит, что алгоритм гибридизации сопровождается (если того требует необходимый уровень целостности) алгоритмом FDE.
В случае если характеристики MEMS-гирометров не обеспечивают автономного выравнивания при помощи гирокомпаса, устройство в соответствии с настоящим изобретением использует известный способ и содержит средства, позволяющие извлекать курс на основании данных GPS или GALILEO. Для этого процессор, осуществляющий гибридизацию между инерциальными данными и радионавигационными данными, получает информацию об измерении несущей частоты GPS или GALILEO от двух антенн, отстоящих друг от друга на достаточное расстояние, и эти измерения синхронизированы между собой. В противном случае, то есть если характеристики MEMS-гирометров обеспечивают автономное выравнивание при помощи гирокомпаса, отпадает необходимость в использовании системы с двумя антеннами.
Во всех случаях выполнения, показанных на фиг. 1-4, каждый канал измерения выдает следующие данные:
- данные угловых скоростей по трем ортогональным направлениям, предпочтительно совпадающим с основными осями летательного аппарата,
- данные линейных ускорений по трем ортогональным направлениям, идентичным направлениям данных угловых скоростей, предпочтительно совпадающим с основными осями летательного аппарата,
- данные о пространственном положении (крен, тангаж и рыскание) и курс,
- данные путевой скорости относительно географического репера,
- данные о местоположении (широта, долгота и высота).
В рассматриваемом случае эти данные называются выходными данными. Следует отметить, что, кроме самого значения величины, алгоритм FDE вычисляет радиус защиты (связанный с требуемой степенью целостности), защищающий измеряемое значение при отказе созвездия (называемом также отказом спутника), не обнаруженном устройством управления созвездиями.
Если сигнал GPS и сигнал GALILEO являются доступными, выходные данные имеют сравнимые степени точности по трем каналам. Таким образом, в устройстве в соответствии с настоящим изобретением все каналы играют одинаковую роль.
В вариантах выполнения, показанных на фиг. 1 и 2, первичные параметры представляют собой «чисто инерциальные» выходные данные (или, точнее, значения, полученные в результате барометрической и инерциальной гибридизации с использованием автоматизации Шулера, согласно предшествующему уровню техники), выдаваемые контуром обработки, содержащим инерционный блок класса 2 Нм/ч (95%) согласно норме ARINC 738. В случае необходимости этот контур можно дублировать. Гибридизированные данные первого канала (MEMS и GPS) и второго канала (MEMS/GALILEO) и чисто инерционного канала являются статистически независимыми и за счет консолидации точности обеспечивают требуемые непрерывность и уровень целостности. Следует отметить, что в случае необходимости целостность по отношению к отказам спутников контролируется алгоритмом FDE, связанным с алгоритмом гибридизации. Данный алгоритм консолидации предназначен для защиты консолидированных значений по отношению к отказам оборудования. С этой точки зрения устройство в соответствии с настоящим изобретением должно содержать три материальных канала, не зависимых друг от друга. Необходимо также, чтобы обнаруженный отказ влиял в данный момент времени только на один канал.
Что касается параметров локализации, для гибридизированных данных трех каналов применяют те же положения, что и для первичных параметров. Консолидация выхода одного канала при помощи выходов двух других каналов позволяет достичь требуемого уровня целостности для определения местоположения.
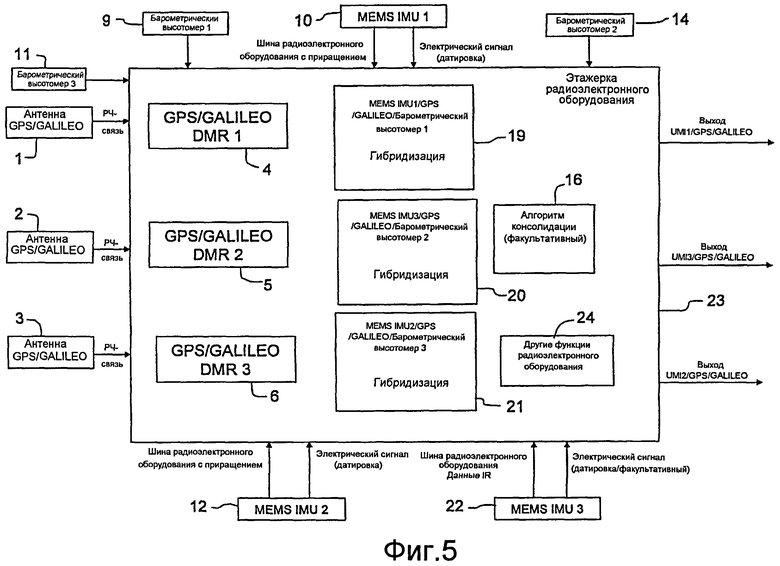
На фиг. 5 показан пример материального распределения различных элементов устройства, показанного на фиг. 3, при этом распределения устройств на других фигурах очевидным образом вытекают из данного примера.
На фиг. 5 показана этажерка 23 радиоэлектронного оборудования, содержащая, в частности, элементы 4-6, 19-21 и блок 24 элементов, обеспечивающих различные полетные функции, например, такие как управление полетом (FMS). Антенны 1-3 соединены с этажеркой 23 через связь ВЧ, тогда как элементы 9-12, 14 и 22 соединены с ней через шину радиоэлектронного оборудования, при этом сигналы датировки IMU 10, 12 и 22, которые являются электрическими сигналами, как правило, проходят через последовательную дифференциальную связь.
Изобретение относится к радионавигации, а именно к аэронавигации с использованием инерционных датчиков и радионавигационных приемников, и может быть использовано на летательных аппаратах. Технический результат заключается в увеличении среднего времени между двумя отказами (MTBF) и обеспечении максимальной дешевизны при сохранении требуемой курсовой точности. Для этого аэронавигационное устройство с инерционными датчиками и радионавигационными приемниками с тремя каналами измерения характеризуется тем, что в двух (10, 12) из трех каналов инерционные блоки измерения принадлежат к MEMS типу с «низкими характеристиками» с гирометрами класса примерно от 1°/час до 10°/час, а третий канал содержит инерционный блок (15) измерения, характеристики которого соответствуют норме ARINC 738, 2 н. и 6 з.п. ф-лы, 6 ил.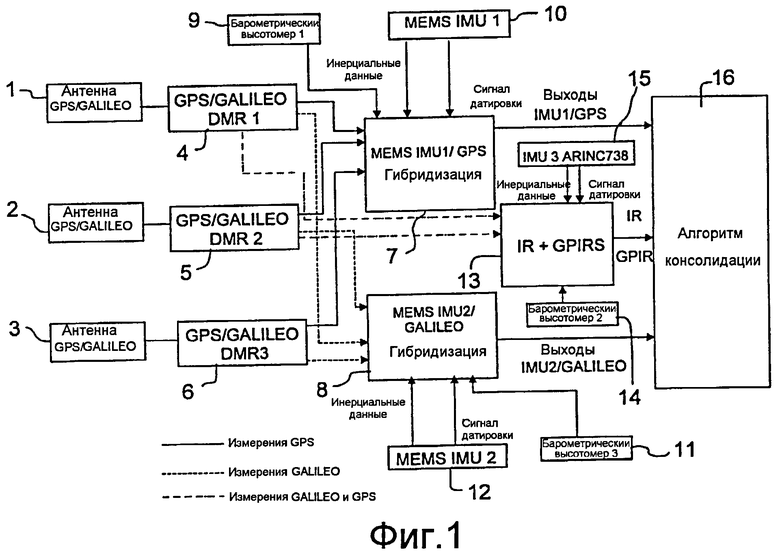
1. Аэронавигационное устройство с инерционными датчиками и радионавигационными приемниками, в котором радионавигационные приемники являются приемниками (4, 5, 6 или 4А, 5А, 6А), работающими с несколькими созвездиями, и их выходы соединены с устройствами гибридизации (7, 8, 13, или 17, 18, 13, или 7А, 8А, 13А) для комбинирования данных, поступающих от MEMS-датчиков с информацией, поступающей, по меньшей мере, от двух радионавигационных систем, при этом устройства гибридизации также соединены с инерционными датчиками (10, 12, 15 или 10, 12, 22), отличающееся тем, что в двух (10, 12) из трех каналов инерционные блоки измерения принадлежат к MEMS-типу с «низкими характеристиками» с гирометрами класса примерно от 1 до 10°/ч, а третий канал содержит инерционный блок (15) измерения, характеристики которого соответствуют норме ARINC 738.
2. Устройство по п.1, отличающееся тем, что упомянутые созвездия являются, по меньшей мере, двумя созвездиями из созвездий GPS, GLONASS, будущей GALILEO или другого будущего созвездия.
3. Устройство по п.1 или 2, отличающееся тем, что третий канал дублируют идентичным независимым каналом.
4. Устройство по одному из пп.1 и 2 с тремя каналами измерения, отличающееся тем, что в трех каналах инерционные блоки измерения принадлежат к MEMS (10, 12, 22) с «высокими характеристиками», гирометры которых имеют класс выше 0,1°/ч.
5. Устройство по п.1, отличающееся тем, что каждый приемник соединен только с одной антенной, при этом каждое устройство гибридизации соединено, по меньшей мере, с двумя синхронизированными приемниками.
6. Устройство по п.1 или 2, отличающееся тем, что содержит два радионавигационных канала приема (1, 4 и 2, 5), три инерционных блока (10, 12, 22) измерения с MEMS, каждый из которых соединен с устройством (19-21) гибридизации, при этом каждое из этих трех устройств гибридизации соединено с двумя каналами приема.
7. Устройство по п.1, отличающееся тем, что содержит средства (16 или 16А) консолидации для защиты сигналов измерения от отклонений или отказов.
8. Способ аэронавигации с инерционными датчиками и радионавигационными приемниками, в котором принимают радионавигационные сигналы, по меньшей мере, от двух разных созвездий спутников позиционирования и осуществляют гибридизацию их с данными, поступающими от инерционных датчиков, отличающийся тем, что при приеме данных от инерционных датчиков, гирометры которых не обеспечивают автономного выравнивания при помощи гирокомпаса, курс извлекают из радионавигационных данных.
| US 2005125141 A1, 09.06.2005 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| US 2005150289 A1, 14.07.2005 | |||
| US 2003135327 A1, 17.07.2003 | |||
| EP 1612514 A, 04.01.2006 | |||
| EP 1326153 A1, 09.07.2003. | |||

