ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНЫЕ ЗАЯВКИ
Настоящая заявка имеет отношение к следующим заявкам на патент США, каждая из которых полностью приведена здесь посредством ссылок:
(1) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ЭЛЕКТРОИНСТРУМЕНТ И СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ ДЛЯ ПОЛЬЗОВАТЕЛЯ»; авторы: Frederick E. Shelton, IV, John Ouwerkerk, Jerome R. Morgan, серийный № 11/343498.
(2) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ЭЛЕКТРОИНСТРУМЕНТ И ОБРАТНОЙ СВЯЗЬЮ ПО НАГРУЗКЕ»; авторы: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, Jeffrey S. Swayze, серийный № 11/343573.
(3) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ЭЛЕКТРОИНСТРУМЕНТ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ»; авторы: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, Jeffrey S. Swayze, серийный № 11/344 035.
(4) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ЭЛЕКТРОИНСТРУМЕНТ И АДАПТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ПОЛЬЗОВАТЕЛЯ»; авторы: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, серийный № 11/343447.
(5) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И ЭЛЕКТРОИНСТРУМЕНТ И ШАРНИРНЫМ КОНЦЕВЫМ МАНИПУЛЯТОРОМ»; авторы: Frederick E. Shelton, IV, Christoph L. Gillum, серийный № 11/343562.
(6) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ЭЛЕКТРОИНСТРУМЕНТ И МЕХАНИЧЕСКИМ ЗАКРЫВАЮЩИМ МЕХАНИЗМОМ»; авторы: Frederick E. Shelton, IV, Christoph L. Gillum, серийный № 11/344024.
(7) «ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С БЛОКИРОВКОЙ КРЮЧКА ЗАКРЫВАЮЩЕГО МЕХАНИЗМА»; авторы: Frederick E. Shelton, IV, Kevin R. Doll, серийный № 11/343321.
(8) «СЕЛЕКТОР РЕДУКТОРА ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СШИВАЮЩЕГО ИНСТРУМЕНТА С МЕХАНИЧЕСКИМ ПРИВОДОМ»; авторы: Frederick E. Shelton, IV, Jeffrey S. Swayze, Eugene L. Timperman, серийный № 11/343563.
(9) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ СО СЪЕМНОЙ АККУМУЛЯТОРНОЙ БАТАРЕЕЙ»; авторы: Frederick E. Shelton, IV, Kevin R. Doll, Jeffrey S. Swayze, Eugene Timperman, серийный № 11/344020.
(10) «ЭЛЕКТРОННЫЕ БЛОКИРОВКИ И ИХ ПРИМЕНЕНИЕ В ХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ»; авторы: Jeffrey S. Swayze, Frederick E. Shelton, IV, Kevin R. Doll, серийный № 11/343439.
(11) «ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С РУКОЯТКОЙ, ПОДВИЖНОЙ ОТНОСИТЕЛЬНО СТЕРЖНЯ»; авторы: Frederick E. Shelton, IV, Jeffrey S. Swayze, Mark S. Ortiz, Leslie M. Fugikawa, серийный № 11/343547.
(12) «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ИНСТРУМЕНТ С ВРАЩАЮЩЕЙСЯ СПУСКОВОЙ И ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ С ПАРАЛЛЕЛЬНЫМ ЗАКРЫВАНИЕМ И КОМПОНЕНТАМИ ДЛЯ ВЫРАВНИВАНИЯ УПОРНОГО ЭЛЕМЕНТА»; авторы: Frederick E. Shelton, IV, Stephen J. Balek, Eugene L. Timperman, серийный № 11/344021.
(13) «ОДНОРАЗОВАЯ КАССЕТА СО СКОБКАМИ С УПОРНЫМ ЭЛЕМЕНТОМ И УСТРОЙСТВОМ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ТКАНИ ДЛЯ ИСПОЛЬЗОВАНИЯ С ХИРУРГИЧЕСКИМ РЕЖУЩИМ И СШИВАЮЩИМ ИНСТРУМЕНТОМ И ЕГО МОДУЛЬНОЙ СИСТЕМОЙ КОНЦЕВОГО МАНИПУЛЯТОРА»; авторы: Frederick E. Shelton, IV, Michael S. Cropper, Joshua M. Broehl, Ryan S. Crisp, Jamison J. Float, Eugene L. Timperman, серийный № 11/343546. и
(14) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ», авторы: Frederick E. Shelton, IV, Jerome R. Morgan, Kevin R. Doll, Jeffrey S. Swayze, Eugene Timperman, серийный № 11/343545.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к хирургическим инструментам, а именно к малоинвазивным хирургическим инструментам с возможностью регистрации различных состояний инструмента.
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными устройствами для открытого хирургического доступа, поскольку меньший разрез обычно приводит к уменьшению времени послеоперационного восстановления и снижению риска осложнений. В связи с этим ведут значительные разработки в сфере эндоскопических инструментов, которые позволяют точно разместить дистальный концевой зажим в требуемое место через канюлю троакара. Данные дистальные концевые зажимы внедряются в ткани для достижения требуемого диагностического и терапевтического эффекта (например, эндоскопический режущий аппарат, захват, режущий инструмент, сшивающий аппарат, клипаппликаторы, приспособление для доступа, устройство предоставления лекарственной/генной терапии, энергетические приспособления использующие ультразвук, радиочастоты, лазер и т. д.).
Известные хирургические сшивающие инструменты включают концевой манипулятор, предназначенный для одновременного продольного рассечения ткани и сшивания рядами скобок на противоположных краях разреза. Концевой манипулятор содержит пару взаимодействующих браншей, которые, если инструмент предназначен для эндоскопических или лапароскопических вмешательств, можно провести через проходное отверстие канюли. Один из элементов бранши принимает кассету со скобами, имеющую по меньшей мере два латерально расположенных ряда скоб. Другой элемент бранши образует упор, имеющий углубления для формирования скоб, выровненные с рядами скоб в кассете. Инструмент содержит множество клиньев с возвратно-поступательным движением, которые при перемещении в дистальную область проходят сквозь отверстия в кассете со скобками и задействуют выталкиватель, служащий опорой для скобок, с целью выталкивания скобок в сторону упорного элемента.
Пример хирургического сшивающего инструмента, который можно использовать в эндоскопических приложениях, описан в патенте США № 5465895 под названием «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ» (Knodel с соавторами), в котором представлено описание эндоскопического режущего инструмента с отдельными закрывающими и сшивающими функциями. При использовании данного устройства хирург может зажать ткань браншами в требуемом положении перед пуском. После того как хирург убедится в том, что бранши надежно удерживают ткань, он может запустить хирургический сшивающий инструмент с одним или несколькими ходами, в зависимости от модификации устройства. Пуск хирургического сшивающего инструмента приводит к рассечению и сшиванию ткани. Одновременное рассечение и сшивание тканей исключает осложнения, которые могут возникать при поочередном выполнении этих операций разными хирургическими инструментами, например только режущими или только сшивающими.
Особое преимущество возможности фиксирования ткани перед пуском инструмента состоит в том, что хирург имеет возможность убедиться (с помощью эндоскопа) в достижении места, в котором предполагается выполнить рассечение, а также в том, что бранши удерживают достаточное количество ткани. В противном случае противолежащие бранши зажима могут быть сведены слишком близко, особенно на дистальных концах, неэффективно фиксируя скобы в рассеченной ткани. С другой стороны, избыточное количество зажатой ткани может приводить к заклиниванию и незавершенности процесса сшивания.
При неисправности эндоскопических хирургических инструментов их часто возвращают производителю или другой организации для анализа неисправности. Если неисправность привела к критическому дефекту инструмента, производителю необходимо определить причину возникновения неисправности и необходимость изменения конструкции. В этом случае производитель может потратить сотни человеко-часов для анализа неисправного инструмента и воссоздания условий, при которых возникла неисправность, основываясь только на повреждении инструмента. Такой способ анализа неисправности может быть дорогим и очень сложным. Кроме того, в результате анализа часто делается простой вывод о том, что неисправность возникла из-за ненадлежащего использования инструмента.
ЧЕРТЕЖИ
В настоящем документе описаны различные варианты осуществления настоящего изобретения посредством примеров в сочетании со следующими фигурами, где:
на Фиг. 1 и 2 представлены виды в перспективе хирургического режущего и сшивающего инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 3-5 представлены виды с пространственным разделением компонентов концевого эффектора и стержня инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 6 представлен вид сбоку концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 7 представлен вид с пространственным разделением компонентов рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 8 и 9 представлены частичные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 10 представлен вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 10A и 10Б представлен пропорциональный датчик, который может использоваться в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 11 представлена принципиальная схема цепи, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
Фиг. 12 и 13 являются видами сбоку рукоятки в соответствии с другими вариантами исполнения настоящего изобретения;
на Фиг. 14-22 представлены различные варианты блокировки крючка закрывающего механизма в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 23A и Б представлено карданное соединение, которое может использоваться в точке сочленения инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 24A и Б представлен торсионный трос, который может использоваться в точке сочленения инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 25-31 представлен хирургический режущий и сшивающий инструмент с усилителем в соответствии с другим вариантом исполнения настоящего изобретения;
на Фиг. 32-36 представлен хирургический режущий и сшивающий инструмент с усилителем в соответствии с еще одним вариантом исполнения настоящего изобретения;
На Фиг. 37-40 представлен хирургический режущий и сшивающий инструмент с тактильной обратной связью в рамках вариантов осуществления настоящего изобретения;
на Фиг. 41 представлено поэлементное изображение концевого манипулятора и стержня инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 42 представлен вид сбоку рукоятки механического инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 43 представлено изображение в разобранном виде рукоятки инструмента, изображенного на ФИГ. 42, который приводится в действие механическим путем;
на Фиг. 44 представлена блок-схема системы регистрации различных состояний инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 45-46 представлен продольный разрез рукоятки инструмента с различными датчиками в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 47 представлен концевой манипулятор инструмента с различными датчиками в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 48 представлен выталкивающий стержень инструмента с датчиком в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 49 представлен вид сбоку рукоятки, концевого манипулятора и выталкивающего стержня инструмента с датчиком в соответствии с различными вариантами исполнения настоящего изобретения;
на ФИГ. 50 представлено изображение в разобранном виде канала для скобок и частей картриджа со скобками инструмента с различными датчиками, в соответствии с различными вариантами осуществления настоящего изобретения;
на Фиг. 51 представлен вид канала для скобок инструмента с различными датчиками в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 52A и 52Б представлены блок-схемы способа управления инструментом в соответствии с различными вариантами исполнения;
на Фиг. 53 представлен пример схемы регистрации состояния инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 54 представлена блок-схема системы регистрации состояний инструмента в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 55 представлен хирургический инструмент с подключением к удаленному компьютеру;
на Фиг. 56 представлена технологическая блок-схема в соответствии с различными вариантами исполнения настоящего изобретения;
на Фиг. 57 представлена технологическая блок-схема в соответствии с различными вариантами исполнения настоящего изобретения; и
на Фиг. 58 представлена схема передачи данных от хирургического инструмента в приложение, установленное на беспроводном устройстве или удаленном компьютере.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1 и 2 изображают хирургический режущий и сшивающий инструмент 10 в соответствии с различными вариантами осуществления настоящего изобретения. Представленный на чертежах вариант осуществления предусматривает эндоскопический хирургический инструмент 10 и в целом отражает варианты осуществления инструмента 10, описанные в настоящем документе, а также режущие и сшивающие эндохирургические инструменты. Тем не менее следует отметить, что в соответствии с другими вариантами исполнения настоящего изобретения инструмент 10 может быть не эндоскопическим хирургическим режущим инструментом, а лапароскопическим инструментом.
Хирургический инструмент 10, изображенный на Фиг. 1 и 2, содержит рукоятку 6, стержень 8 и шарнирный концевой эффектор 12, шарнирно соединенный со стержнем 8 шарнирным сочленением 14. Устройство 16 управления шарниром может быть обеспечено смежно с рукояткой 6 для выполнения вращения концевого эффектора 12 на шарнирном сочленении 14. Необходимо принять во внимание, что различные варианты осуществления могут включать неповоротный концевой зажим и, следовательно, могут не иметь шарнирного сочленения 14 или устройства управления шарнирным сочленением 16. Также в представленном варианте осуществления концевой зажим 12 выполнен в виде эндокатера для фиксации, рассечения и сшивания ткани, однако в других вариантах осуществления могут использоваться иные типы концевых зажимов, предназначенные для других типов хирургических устройств, такие как зажимы, рассекатели, сшивающие инструменты, устройства для наложения скобок, устройства доступа, устройства для введения лекарственных средств/генной терапии, проведения ультразвуковых, РЧ- или лазерных процедур и т. д.
Рукоятка 6 инструмента 10 может включать закрывающий спусковой механизм 18 и пусковой крючок 20 для активации концевого эффектора 12. Следует понимать, что инструменты, имеющие концевые эффекторы, относящиеся к различным хирургическим манипуляциям, могут иметь разные количества или типы спусковых механизмов или иных подходящих устройств управления для эксплуатации концевого эффектора 12. Концевой эффектор 12 показан отделенным от рукоятки 6 предпочтительно удлиненным стержнем 8. В одном варианте исполнения практикующий врач или оператор при управлении инструментом 10 может управлять концевым манипулятором 12 относительно стержня 8 при помощи устройства управления шарнирным соединением 16 (более подробно описано в находящейся на рассмотрении заявке на патент США с серийным № 11/329020, поданной 10 января 2006 года, под названием «Хирургический инструмент с шарнирным концевым манипулятором» (Geoffrey C. Hueil с соавторами), которая во всей своей полноте включена в настоящий документ посредством ссылки).
В этом примере концевой эффектор 12 включает, помимо прочего, канал 22 для скоб и шарнирно поступательно перемещаемый зажимной элемент, такой как упор 24, между которыми поддерживается разнесение, обеспечивающее эффективное сшивание и рассечение ткани, зажатой в концевом эффекторе 12. Рукоятка 6 содержит пистолетную рукоятку 26, к которой врач прижимает закрывающее пусковое устройство 18 для сжатия или закрывания упорной пластины 24 к каналу для скобок 22 концевого зажима 12, чтобы зажать ткань, находящуюся между упорной пластиной 24 и каналом 22. Пусковой крючок 20 находится дальше снаружи закрывающего спускового механизма 18. Когда закрывающий спусковой механизм 18 фиксируется в положении закрытия, как дополнительно описано ниже, пусковой крючок 20 может слегка повернуться к пистолетной рукоятке 26, так чтобы оператор мог дотянуться до него одной рукой. Затем оператор может шарнирно втянуть пусковой крючок 20 к пистолетной рукоятке 26, чтобы вызвать сшивание и рассечение зажатой ткани в концевом эффекторе 12. В других вариантах исполнения, помимо упорного элемента 24, можно применять другие типы зажимных элементов, такие как, например, противоположная бранша и т. д.
Следует понимать, что термины «проксимальный» и «дистальный» применяются в настоящем документе в отношении врача, удерживающего рукоятку 6 инструмента 10. Так, концевой эффектор 12 является дистальным по отношению к более проксимальной рукоятке 6. Следует также понимать, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» применяются в настоящем документе в отношении чертежей. Однако хирургические инструменты применяются во множестве ориентаций и положений, и эти термины не являются ограничивающими и абсолютными.
Закрывающий спусковой механизм 18 может быть активирован первым. Когда врач удовлетворен положением концевого эффектора 12, врач может отодвинуть закрывающий спусковой механизм 18 в его полностью закрытое, фиксированное положение вблизи пистолетной рукоятки 26. Затем может быть нажат пусковой крючок 20. Пусковой крючок 20 возвращается в открытое положение (как показано на Фиг. 1 и 2), когда врач устраняет давление, как более подробно описано ниже. Пусковая кнопка на рукоятке 6, будучи вдавленной, может высвободить заблокированный закрывающий спусковой механизм 18. Пусковая кнопка может быть выполнена в разных видах, например, в виде пусковой кнопки 30, представленной на Фиг. 42-43, скользящей пусковой кнопки 160, представленной на Фиг. 14, и/или кнопки 172, представленной на Фиг. 16.
На Фиг. 3-6 показаны варианты осуществления вращающегося концевого зажима 12 и стержня 8 согласно различным вариантам осуществления. На Фиг. 3 представлен вид с пространственным разделением компонентов концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано в проиллюстрированном варианте осуществления, концевой эффектор 12 может включать, в дополнение к ранее указанному каналу 22 и упору 24, режущий инструмент 32, салазки 33, кассету 34 со скобами, съемно установленную в канале 22, и винтовой стержень 36. Режущий инструмент 32 может представлять собой, например, скальпель. Упорная пластина 24 может шарнирно открываться и закрываться на шарнирных штифтах 25, соединенных с проксимальным концом канала 22. Упор 24 также может включать язычок 27 на своем проксимальном конце, вставленный в компонент системы механического закрытия (дополнительно описана ниже) для открывания и закрывания упора 24. Когда закрывающее пусковое устройство 18 приводится в действие, то есть отводится пользователем инструмента 10, упорная пластина 24 может поворачиваться вокруг шарнирных штифтов 25 в фиксированное, или закрытое, положение. Если зажатие концевого эффектора 12 является удовлетворительным, оператор может активировать пусковой крючок 20, который, как более подробно описано ниже, вызывает продольное перемещение скальпеля 32 и салазок 33 вдоль канала 22, таким образом рассекая ткань, зажатую концевым эффектором 12. В результате движения салазок 33 вдоль канала 22 скобки (не показаны) из картриджа со скобками 34 прошивают рассеченную ткань, упираясь в прижатую упорную пластину 24, которая сгибает их, фиксируя рассеченную ткань. В различных вариантах осуществления салазки 33 могут представлять собой неотъемлемый компонент кассеты 34. Патент США № 6978921, озаглавленный «Хирургический сшивающий инструмент с Е-образным пусковым механизмом» (Shelton, IV и соавторы), который включен в настоящее описание посредством ссылки, обеспечивает дополнительные сведения о такого рода двухходовых режущих и сшивающих инструментах. Салазки 33 могут представлять собой часть кассеты 34, так что когда скальпель 32 оттягивается после операции рассечения, салазки 33 не оттягиваются.
Необходимо отметить, что хотя в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой эффектор 12, который сшивает скобами рассеченную ткань, в других вариантах осуществления могут применяться другие методики сшивания или спаивания рассеченной ткани. Например, могут также применяться концевые эффекторы, которые применяют РЧ энергию или адгезивы для сшивания рассеченной ткани. В патенте США № 5709680 под названием «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО» (Yates и соавторы) и патенте США № 5688270 под названием «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО С УТОПЛЕННЫМИ И/ИЛИ СМЕЩЕННЫМИ ЭЛЕКТРОДАМИ» (Yates и соавторы), которые во всей своей полноте включены в настоящий документ посредством ссылки, описывается эндоскопический режущий инструмент с радиочастотным завариванием рассеченных тканей. В заявке на патент США с серийным № 11/267811 (Jerome R. Morgan и соавторы) и заявке на патент США с серийным № 11/267383 (Frederick E. Shelton, IV и соавторы), которые также во всей своей полноте включены в настоящий документ посредством ссылки, описываются режущие инструменты, в которых для сшивания рассеченных тканей используются клейкие вещества. Соответственно, хотя описание, приведенное в настоящем документе, относится к операциям рассечения/сшивания и аналогичным операциям, описанным ниже, необходимо понимать, что данный вариант осуществления является примером и не является ограничивающим. Также могут использоваться другие способы сшивания ткани.
На Фиг. 4 и 5 представлены виды с пространственным разделением компонентов, а на Фиг. 6 представлен вид сбоку концевого эффектора 12 и стержня 8 в соответствии с различными вариантами осуществления. Как показано в проиллюстрированном варианте осуществления, стержень 8 может включать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 включает отверстие 45, в которое вставляют язычок 27 на упоре 24 для открывания и закрывания упора 24, как дополнительно описано ниже. Внутри закрывающих трубок 40, 42 может быть расположена проксимальная сердцевинная трубка 46. Внутри проксимальной сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной стержень 48, который соединяется со вторичным (или дистальным) приводным стержнем 50 посредством узла 52 конических зубчатых колес. Вторичный приводной стержень 50 соединен с приводной шестерней 54, которая зацепляет проксимальную приводную шестерню 56 винтового стержня 36. Вертикальное коническое зубчатое колесо 52b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть заключены вторичный приводной стержень 50 и приводные шестерни 54, 56. В совокупности главный приводной стержень 48, вспомогательный приводной стержень 50 и шарнирный блок (например, блок конических зубчатых колес 52a-c) в настоящем документе иногда называются блоком главного приводного стержня.
Подшипник 38, расположенный на дистальном конце канала 22 для скоб, принимает винтовой стержень 36, что позволяет винтовому стержню 36 свободно вращаться по отношению к каналу 22. Винтовой стержень 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 так, что при повороте стержня 36 скальпель 32 поступательно перемещается дистально или проксимально (в зависимости от направления вращения) в канале 22 для скобок. Соответственно, когда основной приводной стержень 48 при приведении в действие пускового устройства 20 (как более подробно описано ниже) вращается, блок конических зубчатых колес 52 a-c инициирует вращение вспомогательного приводного стержня 50, который, в свою очередь, вследствие соединения приводных механизмов 54 и 56, инициирует вращение винтового стержня 36, что принуждает продвигающий скальпель элемент 32 перемещаться вдоль канала 22 и рассекать ткань, захваченную концевым зажимом 12. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Когда салазки 33 проходят по каналу 22, наклоненная передняя поверхность может протолкнуть вверх или придвинуть скобы в кассете со скобами через зажатую ткань и вплотную к упору 24. Упор 24 сгибает скобы, таким образом сшивая рассеченную ткань. Когда скальпель 32 оттянут, скальпель 32 и салазки 33 могут отцепиться, при этом салазки 33 остаются на дистальном конце канала 22.
Как описано выше, из-за отсутствия обратной связи при резании и сшивании среди врачей не пользуются признанием эндоскопические режущие электроинструменты, с помощью которых рассечение и сшивание производятся лишь нажатием кнопки. Напротив, в вариантах исполнения настоящего изобретения представлен эндоскопический режущий электроинструмент, обеспечивающий пользователю обратную связь о размещении, усилии и/или положении режущего инструмента 32 в концевом манипуляторе 12.
На Фиг. 7-10 представлен пример варианта осуществления автоматического эндокатера, и в частности его рукоятки, который предоставляет пользователю обратную связь о приведении в рабочее положение и силе нагрузки на режущий инструмент 32 в концевом зажиме 12. Кроме того, в данном варианте осуществления можно применять силу, прилагаемую пользователем при оттягивании пускового крючка 20, для передачи энергии устройству (так называемый «усиленный» режим). Данный вариант осуществления может использоваться с вращающимся концевым зажимом 12 и стержнем 8 в описанных выше вариантах осуществления. Как показано в проиллюстрированном варианте осуществления, рукоятка 6 включает детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. Часть пистолетной рукоятки 26 рукоятки 6 может быть обеспечена аккумуляторной батареей 64, например, литий-ионной батареей. Аккумуляторная батарея 64 подает питание на электрический двигатель 65, расположенный в верхней части пистолетной рукоятки 26 рукоятки 6. Согласно различным вариантам осуществления, двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения приблизительно 25 000 оборотов в минуту. Также могут использоваться другие подходящие типы электродвигателей. Двигатель 65 может приводить в движение блок 90° конических зубчатых колес 66, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Узел 66 конических зубчатых колес может приводить в действие узел 72 планетарной передачи. Узел 72 планетарной передачи может включать ведущую шестерню 74, соединенную с приводным стержнем 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое приводит в действие барабан 80 с винтовой зубчатой передачей посредством приводного стержня 82. Кольцо 84 может быть навинчено на барабан 80 с винтовой зубчатой передачей. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать датчик запуска двигателя 110 (см. Фиг. 10), связанный с пусковым устройством 20, для определения того, что пусковое устройство 20 притянуто (или закрыто) оператором к пистолетной рукоятке 26 рукоятки 6, и тем самым инициировать рассечение/сшивание ткани концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда пусковой крючок 20 втягивается, датчик 110 обнаруживает перемещение и направляет электрический сигнал, указывающий электрическое напряжение (или мощность), которое необходимо передать двигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, вращение двигателя 65 может быть по существу пропорциональным величине перемещения пускового крючка 20. То есть если оператор только слегка втягивает или закрывает пусковой крючок 20, то вращение двигателя 65 является относительно медленным. Когда пусковой крючок 20 полностью втянут (или находится в полностью закрытом положении), вращение двигателя 65 является максимальным. Иными словами, чем сильнее пользователь тянет пусковой крючок 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения.
Рукоятка 6 может включать срединную часть 104 рукоятки, смежную с верхней частью пускового крючка 20. Рукоятка 6 также может содержать смещающую пружину 112, присоединенную между опорами на срединной части 104 рукоятки и пусковом крючке 20. Смещающая пружина 112 может смещать пусковой крючок 20 в полностью открытое положение. Таким образом, когда оператор высвобождает пусковой крючок 20, смещающая пружина 112 вытягивает пусковой крючок 20 в открытое положение, таким образом устраняя активацию датчика 110, таким образом останавливая вращение двигателя 65. Кроме того, благодаря смещающей пружине 112, каждый раз, когда пользователь закрывает пусковой крючок 20, пользователь чувствует сопротивление операции закрывания, что таким образом обеспечивает обратную связь пользователю о скорости вращения двигателя 65. Также оператор может прекратить воздействие на спусковое устройство 20 и тем самым прекратить воздействие на датчик 100 и остановить двигатель 65. Таким образом, пользователь может остановить размещение концевого эффектора 12, обеспечивая таким образом для оператора средство контроля над операцией рассечения/сшивания.
Дистальный конец барабана 80 с винтовой зубчатой передачей включает дистальный приводной стержень 120, который приводит в действие кольцевое зубчатое колесо 122, которое сопрягается с ведущей шестерней 124. Ведущая шестерня 124 соединена с основным приводным стержнем 48 узла основного приводного стержня. Таким образом, вращение двигателя 65 вызывает вращение узла основного приводного стержня, что вызывает активацию концевого эффектора 12, как описано выше.
Кольцо 84, навинченное на барабан 80 с винтовой зубчатой передачей, может включать опору 86, которая расположена внутри паза 88 кулисы 90. Кулиса 90 имеет отверстие 92 на своем противоположном конце 94, которое принимает шарнирный штифт 96, который присоединен между частями 59, 60 внешних сторон рукоятки. Шарнирный штифт 96 также проходит через отверстие 100 в пусковом крючке 20 и отверстие 102 в срединной части 104 рукоятки.
Кроме того, рукоятка 6 может включать датчик обратного действия (или датчик окончания хода) 130 и датчик останова двигателя (или начала хода) 142. В различных вариантах осуществления датчик 130 обратного действия может представлять собой концевой переключатель, расположенный на дистальном конце барабана 80 с винтовой зубчатой передачей, так что кольцо 84, навинченное на барабан 80 с винтовой зубчатой передачей, контактирует с датчиком 130 обратного действия и запускает его, когда кольцо 84 достигает дистального конца барабана 80 с винтовой зубчатой передачей. При активации датчик 130 обратного действия направляет сигнал на двигатель 65, чтобы изменить направление его вращения, таким образом извлекая скальпель 32 концевого эффектора 12 после операции рассечения.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым переключателем. В различных вариантах осуществления он может быть размещен на проксимальном конце барабана 80 с винтовой зубчатой передачей, так что кольцо 84 запускает переключатель 142, когда кольцо 84 достигает проксимального конца барабана 80 с винтовой зубчатой передачей.
Когда во время работы оператор инструмента 10 оттягивает назад пусковое устройство 20, датчик 110 определяет введение в действие пускового устройства 20 и направляет сигнал к двигателю 65, активируя его вращение вправо, например, со скоростью, пропорциональной силе, с которой оператор оттягивает пусковое устройство 20. Вращение двигателя 65 вперед, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце узла 72 планетарной передачи, таким образом вызывая вращение барабана 80 с винтовой зубчатой передачей и перемещение кольца 84, навинченного на барабан 80 с винтовой зубчатой передачей, дистально вдоль барабана 80 с винтовой зубчатой передачей. Вращение барабана 80 с винтовой зубчатой передачей также приводит в действие узел основного приводного стержня, как описано выше, что, в свою очередь, вызывает размещение скальпеля 32 в концевом эффекторе 12. То есть скальпель 32 и салазки 33 проходят продольно через канал 22, таким образом рассекая ткань, зажатую в концевом эффекторе 12. Кроме того, в вариантах осуществления, где используется сшивающий концевой зажим 12, происходит сшивание ткани.
К моменту завершения операции рассечения/сшивания при помощи концевого эффектора 12 кольцо 84 на барабане 80 с винтовой зубчатой передачей достигает дистального конца барабана 80 с винтовой зубчатой передачей, таким образом вызывая запуск датчика 130 обратного действия, который направляет сигнал на двигатель 65, чтобы вызвать изменение направления вращения двигателя 65. Это, в свою очередь, вызывает оттягивание скальпеля 32, а также вызывает перемещение кольца 84 на барабане 80 с винтовой зубчатой передачей обратно к проксимальному концу барабана 80 с винтовой зубчатой передачей.
Срединная часть 104 рукоятки включает тыльное плечо 106, которое зацепляет кулису 90, что наилучшим образом показано на Фиг. 8 и 9. Срединная часть 104 рукоятки также имеет ограничитель 107 рабочего хода, который зацепляет пусковой крючок 20. Перемещение кулисы 90 управляется вращением двигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки, в то время как кольцо 84 продвигается от проксимального кольца барабана с винтовым зубчатым колесом 80 к его дистальному кольцу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь притягивает пусковое устройство 20, пусковое устройство 20 сцепляется с ограничителем рабочего хода 107 срединной части рукоятки 104, вызывая вращение серединной части рукоятки 104 против часовой стрелки. Однако вследствие сцепления тыльного плеча 106 с кулисой 90 срединная часть рукоятки 104 может вращаться против часовой стрелки настолько, насколько позволяет кулиса 90. Таким образом, если по каким-либо причинам необходимо остановить вращение двигателя 65, кулиса 90 остановит вращение, и пользователь не сможет осуществлять дальнейшее притягивание пускового устройства 20, так как срединная часть рукоятки 104 не сможет свободно вращаться против часовой стрелки вследствие удержания ее кулисой 90.
На Фиг. 10A и 10B представлены два состояния параметрического датчика, который может использоваться в качестве датчика 110 работы двигателя в соответствии с различными вариантами исполнения настоящего изобретения. Датчик 110 может включать лицевую часть 280, первый электрод (A) 282, второй электрод (B) 284 и сжимаемый диэлектрический материал 286 между электродами 282 и 284, такой как, например, электроактивный полимер (ЭАП). Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала со спусковым устройством 20, когда оно притянуто. Соответственно, когда пусковое устройство 20 притянуто, диэлектрический материал 286 сжимается, как показано на Фиг. 10 B, так, что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую соотносится с полным сопротивлением между электродами 282 и 284, то очевидно, что, чем больше расстояние, тем больше полное сопротивление, и чем меньше расстояние, тем меньше полное сопротивление. Таким образом, величина, на которую сжимается диэлектрик 286 во время прижимания пускового устройства 20 (обозначена как сила F на Фиг. 42), пропорциональна полному сопротивлению между электродами 282 и 284, что можно использовать для пропорционального управления двигателем 65.
Компоненты примера системы закрытия (или зажатия) упора 24 концевого эффектора 12 путем оттягивания закрывающего спускового механизма 18 также показаны на Фиг. 7-10. В проиллюстрированном варианте осуществления система закрытия включает вилку сцепления 250, соединенную с закрывающим пусковым устройством 18 шарнирным штифтом 251, проходящим через ориентированные отверстия в закрывающем пусковом устройстве 18 и вилке сцепления 250. Шарнирный штифт 252, вокруг которого вращается закрывающий спусковой механизм 18, вставлен через другое отверстие в закрывающем спусковом механизме 18, которое смещено от места, где штифт 251 вставлен через закрывающий спусковой механизм 18. Таким образом, притягивание закрывающего пускового устройства 18 вызывает вращение против часовой стрелки верхней части закрывающего пускового устройства 18, к которому с помощью штифта 251 прикреплена вилка сцепления 250. Дистальный конец направляющей траверсы 250 присоединен посредством штифта 254 к первому закрывающему кронштейну 256. Первый закрывающий кронштейн 256 присоединен ко второму закрывающему кронштейну 258. Вместе закрывающие кронштейны 256, 258 образуют отверстие, в котором установлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. Фиг. 4), так что продольное перемещение закрывающих кронштейнов 256, 258 вызывает продольное движение проксимальной закрывающей трубки 40. Инструмент 10 также включает закрывающий шток 260, расположенный внутри проксимальной закрывающей трубки 40. Закрывающий стержень 260 может включать окно 261, в которое вставляется опора 263 на одной из деталей внешних сторон рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий стержень 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно относительно закрывающего штока 260. Закрывающий шток 260 может также включать дистальный кольцевой выступ 267, который входит в полость 269 в проксимальной сердцевинной трубке 46 и удерживается в ней заглушкой 271 (см. Фиг. 4).
Во время работы, когда вилка сцепления 250 поворачивается вследствие притягивания закрывающего пускового устройства 18, закрывающие кронштейны 256 и 258 принуждают проксимальную закрывающую трубку 40 двигаться в дистальном направлении (т. е. в направлении от рукоятки инструмента 10), что вызывает движение в дистальном направлении дистальной закрывающей трубки 42 и вращение упорной пластины 24 вокруг шарнирных штифтов 25 до фиксированного, или закрытого, положения. Когда закрывающее пусковое устройство 18 разблокировано, проксимальная закрывающая трубка 40 плавно передвигается в проксимальном направлении, что вызывает движение дистальной закрывающей трубки 42 в проксимальном направлении и, вследствие того, что язычок 27 вставлен в отверстие 45 дистальной закрывающей трубки 42, вызывает поворот упорной пластины 24 вокруг шарнирных штифтов 25 до открытого, или разблокированного, положения. Таким образом, оттягивая и блокируя закрывающий спусковой механизм 18, оператор может зажимать ткань между упором 24 и каналом 22, а также разжимать ткань после операции рассечения/сшивания, разблокируя закрывающий спусковой механизм 20 из заблокированного положения.
На Фиг. 11 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оператор начинает прижимать пусковое устройство 20 после фиксации закрывающего пускового устройства 18, активируется датчик 110, позволяя току проходить по цепи. Если в обычном состоянии открытый переключатель датчика обратного действия 130 открыт (что означает, что конец хода концевого зажима не был достигнут), ток будет протекать по направлению к однополюсному реле на два направления 132. Так как переключатель датчика обратного действия 130 не закрыт, индуктор 134 реле 132 не будет находиться под напряжением, то есть реле 132 будет оставаться в невозбужденном состоянии. В цепи также установлен датчик блокировки картриджа 136. Если в концевой зажим 12 вставлен картридж со скобками 34, датчик 136 будет находиться в закрытом состоянии, пропуская ток. И наоборот, если в концевой зажим 12 не вставлен картридж со скобками 34, датчик 136 будет открытым, тем самым препятствуя питанию двигателя 65 от батареи 64.
При вставленном картридже со скобками 34 датчик 136 закрыт, что позволяет подавать напряжение на однополюсное реле на одно направление 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через датчик 136 и датчик резистора переменного сопротивления 110 к двигателю 65 через двухполюсное реле на два направления 140, таким образом питая двигатель 65 и позволяя ему вращаться в прямом направлении.
Когда концевой эффектор 12 достигает конца своего хода, активируется датчик 130 обратного действия, таким образом замыкая переключатель 130 и предоставляя энергообеспечение реле 134. Это приводит к тому, что реле 134 переходит в возбужденное состояние (не показано на Фиг. 13), при этом ток течет не через датчик блокировки картриджа 136 и резистор переменного сопротивления 110, а проходит как к закрытому в обычном состоянии двухполюсному реле на два направления 142, так и к двигателю 65, но через реле 140, что вынуждает двигатель 65 поменять направление вращения.
Поскольку переключатель датчика останова двигателя 142 в обычном состоянии закрыт, ток пойдет назад к реле 134, обеспечивая его замыкание до тех пор, пока не откроется переключатель 142. Когда скальпель 32 полностью втянут, переключатель датчика остановки двигателя 142 активируется и открывается, прекращая тем самым подачу питания на двигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 вращается в целом с постоянной скоростью. Тем не менее оператор получает обратную связь относительно усилия, так как спусковое устройство 20 включено в цепь зубчатых передач привода.
На Фиг. 12 представлен вид сбоку рукоятки 6 с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на Фиг. 12, аналогичен варианту осуществления, представленному на Фиг. 7-10, за исключением того, что вариант осуществления, представленный на Фиг. 12, не имеет кулисы, соединенной с кольцом 84, навинченным на барабан с винтовым зубчатым колесом 80. Вместо этого в варианте осуществления, представленном на Фиг. 12, кольцо 84 включает часть с датчиком 114, которая перемещается с кольцом 84, когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80. Часть с датчиком 114 включает выемку 116. Датчик обратного действия 130 может быть расположен на дистальном конце выемки 116, и датчик останова двигателя 142 может быть расположен на проксимальном конце выемки 116. Когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80, часть с датчиком 114 продвигается вместе с ним. Кроме того, как показано на Фиг. 12, срединная часть 104 может иметь плечо 118, которое входит в выемку 12.
Во время работы, когда оператор инструмента 10 прижимает спусковое устройство 20 к пистолетной рукоятке 26, датчик пуска двигателя 110 определяет движение и направляет сигнал к началу работы двигателю 65, что вызывает, помимо прочего, вращение барабана с винтовым зубчатым колесом 80. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Кроме того, при прижимании пускового устройства 20 срединная часть 104 вращается против часовой стрелки вместе с пусковым устройством 20 за счет ограничителя рабочего хода 107, который сцеплен с пусковым устройством 20. При вращении против часовой стрелки срединной части 104 плечо 118 вращается против часовой стрелки вместе с частью с датчиком 114 на кольце 84 таким образом, чтобы плечо 118 оставалось в выемке 116. Когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80, плечо 118 контактирует с датчиком обратного действия 130 и тем самым активирует его. Аналогичным образом, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80, плечо контактирует с датчиком останова двигателя 142 и активирует его. Такими действиями можно изменить направление движения двигателя 65 и остановить его, в соответствии с описанием выше.
На Фиг. 13 представлен вид сбоку рукоятки 6 с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на Фиг. 13, аналогичен варианту осуществления, представленному на Фиг. 7-10, за исключением того, что в варианте осуществления, представленном на Фиг. 13, кулиса 90 не имеет прорези. Вместо этого кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, имеет вертикальный канал 126. Вместо прорези кулиса 90 имеет опору 128, которая расположена в канале 126. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Когда кольцо 84 продвигается, кулиса 90, вследствие наличия опоры 128, расположенной в канале 126, вращается против часовой стрелки, как показано на Фиг. 13.
Как было указано выше, при использовании двухтактного автоматического инструмента оператор сначала притягивает и блокирует закрывающее спусковое устройство 18. На Фиг. 14 и 15 показан один вариант осуществления способа блокировки закрывающего пускового устройства 18 на пистолетной рукоятке 26 рукоятки 6. В данном варианте осуществления пистолетная рукоятка 26 имеет крюк 150, выполненный с возможностью вращения против часовой стрелки вокруг шарнира 151 под действием торсионной пружины 152. Закрывающее спусковое устройство 18 также включает запирающую пластину 154. Когда оператор притягивает закрывающее пусковое устройство 18, запирающая пластина 154 зацепляется за скошенную часть 156 крюка 150, поворачивая тем самым крюк 150 вверх (или по часовой стрелке, как показано на Фиг. 14-15) до тех пор, пока запирающая пластина 154 полностью не пройдет скошенную часть 156 и не встанет в утопленную выемку 158 крюка 150, фиксируя положение закрывающего пускового устройства 18. Оператор может разблокировать закрывающее спусковое устройство 18, сдвигая вниз скользящую спусковую кнопку 160 на задней или противоположной стороне пистолетной рукоятки 26. При сдвигании вниз скользящей пусковой кнопки 160 крюк 150 поворачивается по часовой стрелке, высвобождая запирающую пластину 154 из утопленной выемки 158.
На Фиг. 16 показан другой механизм фиксации закрывающего спускового устройства в соответствии с различными вариантами осуществления. В варианте осуществления, представленном на Фиг. 16, закрывающее спусковое устройство 18 включает клин 160, имеющий стреловидную часть 161, которая выполнена с возможностью опускания вниз (или в направлении по часовой стрелке) под действием пластинчатой пружины 162. Клин 160 и пластинчатая пружина 162 могут быть выполнены, например, из формованного пластика. Когда закрывающее спусковое устройство 18 притянуто, стреловидная часть 161 вставлена в отверстие 164 в пистолетной рукоятке 26 рукоятки 6. Нижняя скошенная поверхность 166 стреловидной части 161 зацепляется за нижнюю боковую стенку 168 отверстия 164, принуждая стреловидную часть 161 поворачиваться против часовой стрелки. В результате этого нижняя скошенная поверхность 166 полностью заходит за нижнюю боковую стенку 168, сила, поворачивающая стреловидную часть 161 против часовой стрелки, прекращает воздействие на нее, при этом нижняя боковая стенка 168 фиксирует стреловидную часть 161 в закрытом положении, зацепляясь за выемку 170.
Чтобы разблокировать закрывающее пусковое устройство 18, пользователю нужно надавить на кнопку 172 на противоположной стороне закрывающего пускового устройства 18, вынуждая стреловидную часть 161 повернуться против часовой стрелки и позволяя стреловидной части 161 выйти из отверстия 164.
На Фиг. 17-22 показан блокирующий механизм закрывающего пускового устройства в соответствии с другим вариантом осуществления. Как показано в этом варианте осуществления, закрывающее спусковое устройство 18 включает гибкое продольное плечо 176, имеющее выступающий боковой шип 178. Плечо 176 и штифт 178 могут быть выполнены, например, из формованного пластика. Пистолетная рукоятка 26 ручки 6 имеет отверстие 180 с расположенным внутри него латерально расширяющимся клином 182. Когда закрывающее пусковое устройство 18 втянуто, штифт 178 зацепляется за клин 182, затем штифт 178 продвигается нижней поверхностью 184 клина 182 вниз (то есть плечо 176 поворачивается по часовой стрелке), как показано на Фиг. 17 и 18. Когда штифт 178 полностью заходит за нижнюю поверхность 184, воздействие, вынуждающее плечо 176 двигаться по часовой стрелке, прекращается, и штифт 178 поворачивается против часовой стрелки, при этом штифт 178 останавливается в выемке 186 за клином 182, как показано на Фиг. 19, фиксируя закрывающее пусковое устройство 18. Штифт 178 дополнительно удерживается на месте в закрытом положении гибким ограничителем 188, выступающим из клина 184.
Чтобы разблокировать закрывающее спусковое устройство 18, оператор может дополнительно надавить на закрывающее спусковое устройство 18, чтобы штифт 178 продвинулся до наклонной задней стенки 190 отверстия 180, при этом штифт 178 вынужденно продвигается по направлению вверх мимо гибкого ограничителя 188, как показано на Фиг. 20 и 21. Затем штифт 178 свободно выходит через верхний канал 192 отверстия 180, при этом закрывающее спусковое устройство 18 перестает фиксироваться на пистолетной рукоятке 26, как показано на Фиг. 22.
На Фиг. 23A-B показан универсальный шарнир (u-образный шарнир) 195. Вторая деталь 195-2 u-образного шарнира 195 вращается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На Фиг. 23A показан u-образный шарнир 195 в линейном (180°) расположении, на Фиг. 23B показан u-образный шарнир 195 под углом приблизительно 150°. U-образный шарнир 195 может быть использован вместо конических зубчатых колес 52 a-c (см. для примера Фиг. 4) в шарнирном сочленении 14 блока основного приводного стержня для подвижного присоединения концевого зажима 12. На Фиг. 24A-B показан кабель кручения 197, который может быть использован как вместо конических зубчатых колес 52 a-c, так и вместо u-образного шарнира 195 для подвижного присоединения концевого зажима 12.
На Фиг. 25-31 представлен другой вариант исполнения двухтактного хирургического режущего и сшивающего электроинструмента 10 с усилителем в соответствии с другим вариантом исполнения настоящего изобретения. Вариант осуществления, представленный на Фиг. 25-31, аналогичен варианту, представленному на Фиг. 6-10, за исключением того, что вместо барабана с винтовым зубчатым колесом 80 вариант осуществления, представленный на Фиг. 23-28, включает альтернативный блок зубчатой передачи. Вариант осуществления, представленный на Фиг. 25-31, включает блок редуктора 200, включающий несколько зубчатых передач, расположенных в рамке 201, при этом зубчатые передачи располагаются между планетарной шестерней 72 и ведущей шестерней 124 на проксимальном конце приводного стержня 48. Как описано ниже, блок редуктора 200 обеспечивает обратную связь с пользователем через спусковое устройство 20, информируя о приведении в рабочее положение и силе нагрузки концевого зажима 12. Также пользователь может приложить силу к системе через блок редуктора 200, обеспечивая приведение концевого зажима 12 в рабочее положение. В этом отношении, аналогично описанным выше вариантам осуществления, вариант осуществления, представленный на Фиг. 23-32, описывает другой автоматический инструмент с усилителем 10, который дает обратную связь пользователю относительно силы нагрузки, приложенной к инструменту.
В описанном варианте осуществления пусковое устройство 20 включает две части: основную часть 202 и жесткую часть 204. Основная часть 202 может быть выполнена, например, из пластика, а жесткая часть 204 может быть выполнена из более твердого материала, например, металла. В описанном варианте осуществления жесткая часть 204 примыкает к основной части 202, однако в соответствии с другими вариантами осуществления жесткая часть 204 может быть помещена внутрь основной части 202. Шарнирный штифт 207 может проходить через отверстия в частях 202 и 204 спускового устройства и являться точкой, вокруг которой вращается спусковое устройство 20. Кроме того, пружина 222 может оказывать давление на пусковое устройство 20, вынуждая его вращаться в направлении против часовой стрелки. Дистальный конец пружины 222 может быть связан с штифтом 224, который связан с частями 202 и 204 спускового устройства 20. Проксимальный конец пружины 222 может быть связан с одной из деталей внешней нижней стороны 59 и 60 рукоятки.
В изображенном варианте осуществления настоящего изобретения главная часть 202 и жесткая часть 204 включают передающие части 206, 208 (соответственно) на своих верхних концевых частях. Передающие части 206 и 208 зацепляют зубчатое колесо в блоке редуктора 200, как описано ниже, приводя в движение блок основного приводного стержня и обеспечивая пользователю обратную связь относительно приведения концевого зажима 12 в рабочее положение.
Блок редуктора 200 может включать, как показано в представленном варианте осуществления, 6 (шесть) зубчатых колес. Первое зубчатое колесо 210 блока редуктора 200 зацепляет передающие части 206 и 208 спускового устройства 20. Кроме того, первое зубчатое колесо 210 сцепляется с меньшим по размеру вторым зубчатым колесом 212, меньшее второе зубчатое колесо 212 расположено соосно с большим третьим зубчатым колесом 214. Третье зубчатое колесо 214 сцепляется с меньшим четвертым зубчатым колесом 216, которое расположено соосно с пятым зубчатым колесом 218. Пятое зубчатое колесо 218 является коническим зубчатым колесом, расположенным под 90°, которое сцепляется с сопряженным коническим зубчатым колесом 220, расположенным под 90° (наиболее точно показано на Фиг. 31), связанным с ведущей шестерней 124, приводящей в действие основной приводной стержень 48.
В процессе работы, когда пользователь прижимает спусковое устройство 20, датчик запуска двигателя (не показан) активируется, направляя сигнал двигателю 65 к вращению со скоростью, пропорциональной усилию или силе, с которой оператор притягивает спусковое устройство 20, что заставляет двигатель 65 вращаться со скоростью, пропорциональной сигналу от датчика. В данном варианте осуществления датчик не показан, однако он может быть подобен датчику запуска двигателя 110, описанному выше. Датчик может быть расположен в рукоятке 6 таким образом, чтобы он подвергался нажатию при притягивании спускового устройства 20. Также вместо пропорционального датчика может использоваться двухпозиционный датчик.
Вращение двигателя 65 вызывает вращение конических зубчатых колес 68 и 70, что, в свою очередь, вызывает вращение планетарной шестерни 72 и - через приводной стержень 76 - вращение кольцевого зубчатого колеса 122. Кольцевое зубчатое колесо 122 зацепляет ведущую шестерню 124, которая соединена с основным приводным стержнем 48. Таким образом, вращение ведущей шестерни 124 приводит в действие основной приводной стержень 48, что инициирует операцию по рассечению/сшиванию концевым зажимом 12.
Вращение ведущей шестерни 124 в прямом направлении, в свою очередь, вызывает вращение конического зубчатого колеса 220, что при неподвижных зубчатых передачах блока редуктора 200 вызывает вращение первого зубчатого колеса 210. Первое зубчатое колесо 210 зацепляет передающие части 206 и 208 пускового устройства 20, вызывая вращение пускового устройства 20 против часовой стрелки, когда двигатель 65 продвигает концевой зажим 12 вперед (и вращение против часовой стрелки, когда двигатель 65 вращается в обратном направлении, втягивая концевой зажим 12). Таким образом, пользователь получает обратную связь относительно силы нагрузки и приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, связанное с силой нагрузки, приложенной к концевому зажиму 12. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после выполнения манипуляции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит вращение пускового устройства 20 по часовой стрелке и которая, как правило, пропорциональна скорости вращения двигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного стержня (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. То есть при притягивании пускового устройства 20 передающие части 206 и 208 вращаются против часовой стрелки, что заставляет зубчатые передачи блока редуктора 200 вращаться, тем самым вызывая вращение ведущей шестерни 124 и основного приводного стержня 48.
Хотя это не показано на Фиг. 25-31, инструмент 10 может дополнительно включать датчик обратного движения двигателя и датчик останова двигателя. Как описано выше, датчик обратного хода и датчик останова электродвигателя могут определять соответственно завершение режущего хода (полное введение ножа 32) и завершение втягивания (полное втягивание ножа 32). Схема, аналогичная описанной выше и приведенной на Фиг. 11, может использоваться для соответствующего питания двигателя 65.
На Фиг. 32-36 изображен автоматический двухтактный режущий и сшивающий хирургический инструмент 10 с усилителем в соответствии с другим вариантом осуществления. Вариант осуществления, представленный на Фиг. 32-36, аналогичен варианту, представленному на Фиг. 25-31, за исключением того, что в варианте осуществления, представленном на Фиг. 32-36, спусковое устройство 20 включает нижнюю часть 228 и верхнюю часть 230. Обе части 228 и 230 связаны между собой и вращаются вокруг шарнирного штифта 207, который проходит через каждую часть 228 и 230. Верхняя часть 230 включает передающую часть 232, которая зацепляется за первое зубчатое колесо 210 блока редуктора 200. Пружина 222 связана с верхней частью 230 и воздействует на нее таким образом, чтобы верхняя часть поворачивалась по часовой стрелке. Верхняя часть 230 может также включать нижнее плечо 234, которое связано с верхней поверхностью нижней части 228 пускового устройства 20, при этом, когда верхняя часть 230 вращается по часовой стрелке, нижняя часть 228 также вращается по часовой стрелке, и когда нижняя часть 228 вращается против часовой стрелки, верхняя часть 230 также вращается против часовой стрелки. Кроме того, нижняя часть 228 включает ограничитель вращения 238, который зацепляется за плечо верхней части 230. Таким образом, когда верхняя часть 230 начинает вращаться против часовой стрелки, нижняя часть 228 также вращается против часовой стрелки, и когда нижняя часть 228 вращается по часовой стрелке, верхняя часть 230 также вращается по часовой стрелке.
Данный вариант осуществления также включает датчик запуска двигателя 110, который направляет сигнал к двигателю 65, что в различных вариантах осуществления может вызывать вращение двигателя 65 со скоростью, пропорциональной силе, приложенной оператором при притягивании спускового устройства 20. Датчик 110 может являться, например, реостатом или иным датчиком переменного сопротивления, как описано в настоящем документе. Кроме того, инструмент 10 может включать датчик обратного действия 130, который задействуется или переключается в случае контакта с фронтальной поверхностью 242 верхней части 230 пускового устройства 20. После приведения в действие датчик обратного действия 130 направляет сигнал двигателю 65 об изменении направления вращения. Кроме того, инструмент 10 может включать датчик останова двигателя 142, который задействуется или срабатывает в случае контакта с нижней частью 228 спускового устройства 20. После приведения в действие датчик останова двигателя 142 направляет сигнал двигателю 65 о прекращении вращения в обратном направлении.
Во время работы, когда хирург отводит крючок закрывающего механизма 18 в заблокированное положение, пусковой крючок 20 слегка отведен (при помощи механизмов, известных в данной области техники, включая патент США № 6978921 (Frederick Shelton, IV и соавторы) и патент США № 6905057 (Jeffery S. Swayze и соавторы), которые во всей своей полноте включены в настоящий документ посредством ссылок), таким образом, чтобы пользователь мог захватить пусковой крючок 20 для запуска операции разрезания и сшивания, как показано на Фиг. 32 и 33. В этот момент, как показано на Фиг. 33, передаточная часть 232 верхней части 230 спускового устройства 20 приходит в зацепление с первым зубчатым колесом 210 блока редуктора 200. Когда оператор притягивает спусковое устройство 20, в соответствии с различными вариантами осуществления, спусковое устройство 20 может немного повернуться, например, на пять градусов, прежде чем сдвинуть датчик запуска двигателя 110, как показано на Фиг. 34. Активация датчика 110 вызывает вращение двигателя 65 в прямом направлении со скоростью, пропорциональной силе, которую прикладывает оператор. Вращение двигателя 65 в прямом направлении вызывает, как описано выше, вращение основного приводного стержня 48, что, в свою очередь, инициирует процесс приведения в рабочее положение скальпеля 32 в концевом зажиме 12 (то есть скальпель начинает проходить по каналу 22). Вращение ведущей шестерни 124, которая связана с основным приводным стержнем 48, вызывает вращение зубчатых колес 210 и 220 в блоке редуктора 200. Так как первое зубчатое колесо 210 сцепляется с передаточной частью 232 в верхней части 230 пускового устройства 20, верхняя часть 232 вращается против часовой стрелки, что вызывает вращение против часовой стрелки нижней части 228.
Когда скальпель 32 находится в полностью рабочем положении (то есть находится в конце хода рассечения), фронтальная поверхность 242 верхней части 230 активирует датчик обратного действия 130, который направляет сигнал двигателю 65 об изменении направления движения. Это вызывает изменение направления вращения блока основного приводного стержня и втягивание скальпеля 32. Вращение блока основного приводного стержня в обратном направлении вызывает изменение направления вращения зубчатых колес 210 и 220 в блоке редуктора, что вызывает вращение по часовой стрелке верхней части 230 пускового устройства 20 и вращение по часовой стрелке нижней части 228 пускового устройства 20 до тех пор, пока нижняя часть 228 не сдвинет или активирует датчик останова двигателя 142, когда скальпель 32 полностью втянут, что вызывает остановку двигателя 65. Таким образом, пользователь получает обратную связь относительно приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, соотносимое с приведением концевого зажима 12 в рабочее положение и в частности с силой нагрузки, приложенной к скальпелю 32. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после выполнения манипуляции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит вращение пускового устройства 20 по часовой стрелке и которая, как правило, пропорциональна скорости вращения двигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного стержня (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. То есть при притягивании пускового устройства 20 передающая часть 232 в верхней части 230 вращается против часовой стрелки, что заставляет зубчатые передачи блока редуктора 200 вращаться, тем самым вызывая вращение ведущей шестерни 124 и блока основного приводного стержня.
В описанных выше вариантах осуществления используются системы обратной связи с усилителем, в которых предусмотрено или не предусмотрено адаптивное управление (например, использование датчиков 110, 130 и 142 за пределами замкнутой системы двигателя 65, цепи зубчатых передач привода и концевого зажима 12) для автоматического двухтактного режущего и сшивающего хирургического инструмента. То есть сила, приложенная пользователем для притягивания спускового устройства 20, может являться дополнением к силе, приложенной двигателем 65, вследствие того, что спусковое устройство 20 включено (напрямую или опосредованно) в цепь зубчатых передач привода между двигателем 65 и основным приводным стержнем 48. В других вариантах осуществления настоящего изобретения для пользователя может быть обеспечена тактильная обратная связь относительно положения ножа 32 в концевом манипуляторе, при которой не происходит встраивание пускового крючка 20 в редуктор привода. На Фиг. 37-40 показан автоматический режущий и сшивающий хирургический инструмент с такой системой тактильной позиционной обратной связи.
В показанном на Фиг. 37-40 варианте осуществления спусковое устройство 20 может иметь нижнюю часть 228 и верхнюю часть 230, по аналогии с инструментом 10, показанным на Фиг. 32-36. Однако в отличие от варианта осуществления, изображенного на Фиг. 32-36, верхняя часть 230 не имеет передаточной части, которая сопрягается с частью цепи зубчатых передач привода. Вместо этого инструмент включает второй двигатель 265 с ввинченным в него резьбовым стержнем 266. В то время как двигатель 265 вращается, резьбовый стержень 266 совершает продольные возвратно-поступательные движения в или из двигателя 265, в зависимости от направления вращения. Инструмент 10 также имеет датчик положения 268, который реагирует на вращение основного приводного стержня 48, преобразовывая инкрементное вращательное движение основного приводного стержня 48 (или другого компонента основного приводного блока), например, в соответствующие серии цифровых сигналов. В изображенном варианте осуществления ведущая шестерня 124 включает проксимальный приводной стержень 270, который соединен с кодирующим устройством 268.
Инструмент 10 также включает систему управления (не показана), которая может быть реализована с помощью микроконтроллера или иной интегральной схемы, принимающей цифровые сигналы от датчика положения 268. На базе сигналов от датчика положения 268 схема управления может определять степень наложения скальпеля 32 в концевом зажиме 12. То есть схема управления может определять, находится ли скальпель 32 в полностью рабочем, полностью втянутом или промежуточном положении. Определив рабочее положение концевого зажима 12, система управления может направить сигнал второму двигателю 265, управляя его вращением и, таким образом, возвратно-поступательными движениями резьбового стержня 266.
В процессе работы, как показано на Фиг. 37, когда закрывающее спусковое устройство 18 не заблокировано в прижатом положении, спусковое устройство 20 поворачивается от пистолетной рукоятки 26 рукоятки 6, при этом фронтальная поверхность 242 верхней части 230 спускового устройства 20 не соприкасается с проксимальным концом резьбового стержня 266. Когда оператор притягивает закрывающее пусковое устройство 18 и блокирует его в закрытом положении, пусковое устройство 20 несколько поворачивается в направлении закрывающего пускового устройства 20, при этом оператор может зажать пусковое устройство 20, как показано на Фиг. 38. В этом положении фронтальная поверхность 242 верхней части 230 контактирует с проксимальным концом резьбового стержня 266.
Когда пользователь притягивает пусковое устройство 20, после того как он пройдет некоторое начальное расстояние (например, после поворота на 5 градусов), может срабатывать датчик запуска двигателя 110, при этом, как описано выше, датчик 110 направляет сигнал двигателю 65, вызывая его поступательное вращение со скоростью, пропорциональной силе притягивания, приложенной оператором к пусковому устройству 20. Вращение двигателя 65 в прямом направлении через цепь зубчатых передач привода вызывает вращение основного приводного стержня 48, что вынуждает скальпель 32 и салазки 33 спускаться вниз по каналу 22 и рассекать ткань, захваченную концевым зажимом 12. Система управления получает выходные сигналы с датчика положения 268 относительно инкрементного вращения блока основного приводного стержня и направляет сигнал второму двигателю 265, вызывая его вращение, в результате чего резьбовый стержень 266 втягивается в двигатель 265. Это вызывает вращение против часовой стрелки верхней части 230 пускового устройства 20, что вызывает вращение также против часовой стрелки нижней части 228 пускового механизма. Таким образом, поскольку возвратно-поступательное движение резьбового стержня 266 связано с вращением блока основного приводного стержня, оператор инструмента 10, прижимая спусковое устройство 20, получает тактильную обратную связь о положении концевого зажима 12. Однако сила притягивания, которую прикладывает оператор, не влияет напрямую на движение блока основного приводного стержня, так как в данном варианте осуществления спусковое устройство 20 не является частью цепи зубчатых передач привода.
Контролируя инкрементарное вращение блока основного приводного стержня по выходным сигналам датчика положения 268, система управления может определять, когда скальпель 32 находится в полностью рабочем положении (то есть полностью выдвинут). В этот момент система управления может направить сигнал двигателю 65 об изменении направления для втягивания скальпеля 32. Вращения двигателя 65 в обратном направлении вызывает изменение направления вращения блока основного приводного стержня, что определяется датчиком положения 268. На базе сигнала датчика положения 268 о вращении в обратном направлении система управления направляет сигнал второму двигателю 265, вынуждая его изменить направление вращения на противоположное, при этом резьбовый стержень 266 начинает выдвигаться в продольном направлении из двигателя 265. Это движение вынуждает верхнюю часть 230 пускового устройства 20 поворачиваться по часовой стрелке, что вызывает вращение по часовой стрелке нижней части 228. Таким образом, оператор может почувствовать силу движения по часовой стрелке пускового устройства 20, что обеспечивает оператору обратную связь о том, в каком состоянии находится скальпель 32 в концевом зажиме 12. Система управления может определить, когда скальпель 32 находится в полностью втянутом положении. В этот момент система управления может направить сигнал двигателю 65 для прекращения вращения.
В соответствии с другими вариантами осуществления, вместо системы управления, определяющей положение скальпеля 32, могут быть использованы датчик обратного действия и датчик останова двигателя, как описано выше. Кроме того, вместо пропорционального датчика 110 для управления вращением двигателя 65 может использоваться двухпозиционный датчик. В таком варианте осуществления оператор не может контролировать скорость вращения двигателя 65, однако двигатель может вращаться с предварительно определенной скоростью.
На Фиг. 41-43 представлен пример исполнения эндоскопического режущего инструмента с механическим приводом и, в частности, рукоятка 6, стержень 8 и концевой манипулятор 12. Дополнительную информацию об эндоскопическом режущем инструменте с механическим приводом см. в заявке на патент США с серийным № 11/052632 под названием «Хирургический сшивающий инструмент с многотактным пусковым механизмом с автоматическим отводом при спусковом нажатии», которая включена в настоящий документ во всей своей полноте посредством ссылки. Как показано на Фиг. 41, концевой зажим 12 отвечает на закрывающее движение рукоятки 6 (на Фиг. 41 не показана) сначала путем включения торцевой поверхности упорной пластины 1002, связанной с проксимальным концом упорной пластины 1004, имеющим латерально выступающие шарнирные штифты упорной пластины 25, которые расположены проксимально по отношению к вертикально выступающему язычку упорной пластины 27. Шарнирные штифты упорной пластины 25 сдвигаются внутри серпообразных отверстий 1006 в канале для скобок 22, открывая и закрывая упорную пластину 24 относительно канала 22. Язычок 27 сцепляется с изогнутой петлей 1007, выступающей вовнутрь в отверстии петли 45 на дистальном конце 1008 закрывающей трубки 1005, которая заканчивается дистальным краем 1008, накладывающимся на торцевую поверхность 1002. Таким образом, когда закрывающая трубка 1005 двигается в проксимальном направлении из открытого положения, изогнутая петля 1007 закрывающей трубки 1005 тянет язычок упорной пластины 27 в проксимальном направлении. Шарнирные штифты упорной пластины 25 продвигаются по серпообразным отверстиям 1006 канала для скобок 22, одновременно сдвигая упорную пластину 24 в проксимальном направлении и поворачивая вверх в открытое положение. Когда закрывающая трубка 1005 перемещается в дистальном направлении, изогнутая петля 1007 в отверстии петли 45 высвобождает язычок упорной пластины 27, и дистальный край 1008 толкает торцевую поверхность упорной пластины 1002, закрывая упорную пластину 24.
Представленные на Фиг. 41 стержень 8 и концевой зажим 12 также включают компоненты, реагирующие на приводное движение выталкивающего стержня 1010. В частности, выталкивающий стержень 1010 зацепляет с возможностью вращения выталкивающий кюветообразный элемент 1012 с продольной выемкой 1014. Выталкивающий кюветообразный элемент 1012 перемещается в продольном направлении в пределах рамки 1016 в ответ на продольное движение выталкивающего стержня 1010. Продольная прорезь 1018 в закрывающей трубке 1005 выполнена с возможностью соединения с правой или левой деталями внешней стороны 61 и 62 рукоятки 6 (на Фиг. 41 не показана). Длина продольной прорези 1018 в закрывающей трубке 1005 достаточна, чтобы допустить относительное продольное движение деталей рукоятки 61 и 62 для выполнения выталкивающего и закрывающего движений, соответственно, с присоединением деталей рукоятки 61 и 62, проходящих через продольную прорезь 1020 в рамку 1016, чтобы плавно зацепить продольную выемку 1014 в кюветообразном элементе рамки 1012.
Дистальный конец кюветообразного элемента рамки 1012 прикрепляется к проксимальному концу стержня пускового механизма 1022, который перемещается в пределах рамки 1016, в частности в направителе 1024, чтобы сместить в дистальном направлении скальпель 32 в концевом зажиме 12. Концевой зажим 12 включает картридж со скобками 34, который приводится в действие скальпелем 32. Кассета со скобами 34 включает лоток 1028, который удерживает тело кассеты 1030, клиновидный движущий механизм салазок 33, движущие механизмы скобок 1034 и скобки 1036. Необходимо понимать, что клиновидный движущий механизм салазок 33 перемещается в продольном направлении в пределах выталкивающей выемки (не показана), расположенной между лотком картриджа 1028 и корпусом картриджа 1030. Клиновидный движущий механизм салазок 33 имеет кулачковые поверхности, контактирующие и поднимающие движущие механизмы скобок 1034 вверх, продвигая скобки 1036. Корпус картриджа со скобками 1030 дополнительно включает проксимально открытый вертикальный паз 1031 для прохождения скальпеля 32. В частности, вдоль дистального конца скальпеля 32 предусмотрена режущая поверхность 1027 для рассечения ткани после скрепления скобками.
Необходимо отметить, что для стержня 8, представленного на Фиг. 4, возможность шарнирного соединения не предусмотрена. Тем не менее области применения настоящего изобретения могут включать инструменты с шарнирными соединениями, что показано выше на Фиг. 1-4 и описано в следующих патентах США и заявках на патент, описания которых во всей своей полноте включены в настоящий документ посредством ссылки: (1) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ШАРНИРНЫМ МЕХАНИЗМОМ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ», публикация заявки на патент США № 2005/0006434 (авторы: Frederick E. Shelton IV, Brian J. Hemmelgarn, Jeffrey S. Swayze, Kenneth S. Wales), поданной 9 июля 2003 года. (2) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ШАРНИРНЫМ СОЕДИНЕНИЕМ ДЛЯ НАПРАВЛЕНИЯ ВЫТАЛКИВАЮЩЕГО СТЕРЖНЯ», патент США № 6786382 (автор Brian J. Hemmelgarn). (3) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ БОКОВЫМ ПЕРЕМЕЩЕНИЕМ ШАРНИРНОГО СОЕДИНЕНИЯ», патент США № 6981628 (автор Jeffrey S. Swayze). (4) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С СУЖАЮЩИМСЯ ВЫТАЛКИВАЮЩИМ СТЕРЖНЕМ ДЛЯ УВЕЛИЧЕНИЯ ГИБКОСТИ ШАРНИРНОГО СОЕДИНЕНИЯ», патент США № 6964363 (авторы: Frederick E. Shelton IV, Michael Setser, Bruce Weisenburgh II). (5) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ОПОРНЫМИ ПЛАСТИНАМИ ШАРНИРНОГО СОЕДИНЕНИЯ ДЛЯ ПОДДЕРЖКИ ВЫТАЛКИВАЮЩЕГО СТЕРЖНЯ», заявка на патент США № 2005/0006431 (авторы: Jeffrey S. Swayze, Joseph Charles Hueil), поданная 9 июля 2003 года.
На Фиг. 42-43 представлен вариант осуществления рукоятки 6, выполненной с возможностью использования в эндокатере с механическим приводом, совместно с вариантом осуществления стержня 8 и концевого зажима 12, как показано на Фиг. 41. Очевидно, что для механического закрывания и приведения в действие концевого зажима 12 можно использовать рукоятку любой подходящей конструкции. На Фиг. 42-43 рукоятка 6 сшивающе-режущего хирургического инструмента 10 включает сочлененный пусковой механизм 1060, в результате чего достигаются повышенная прочность, уменьшенный размер рукоятки, меньшее изгибание и т. д.
Закрывание концевого манипулятора 12 (не показан на Фиг. 42-43) происходит при нажатии на крючок закрывающего механизма 18 в направлении пистолетной рукояти 26 ручки 6. Крючок закрывающего механизма 18 вращается на пальце 252, который присоединен к правой и левой наружным нижним боковым частям 59 и 60 рукоятки 6, вызывая выдвижение вперед верхней части 1094 крючка закрывающего механизма 18. Импульс закрытия передается на закрывающую трубку 1005 через замыкающую вилку сцепления 250, которая соединяется с закрывающим соединительным элементом 1042 и верхней частью 1094 закрывающего пускового устройства 18 при помощи штифта замыкающей вилки сцепления 1044 и штифта закрывающего соединительного элемента 1046, соответственно. В полностью открытом положении, как показано на Фиг. 42, верхняя часть 1094 закрывающего пускового устройства 18 захватывает и удерживает запорный рычаг 1048 шарнирной пусковой кнопки закрытия 30 в показанном положении. Когда закрывающее пусковое устройство 18 оказывается полностью нажатым, закрывающее пусковое устройство 18 освобождает запорный рычаг 1048, и прилегающая поверхность 1050 поворачивается и сцепляется с дистальной выемкой справа 1052 шарнирного запорного рычага 1048, удерживая закрывающее пусковое устройство 18 в зажатом, или закрытом, положении. Проксимальный конец запорного рычага 1048 вращается вокруг бокового шарнирного соединения 1054 с деталями 59 и 60, воздействуя на пусковую кнопку закрытия 30. Промежуточная дистальная сторона 1056 пусковой кнопки закрытия 30 прижимается в проксимальном направлении под действием пружины 1058, зажатой между корпусом 1040 и пусковой кнопкой закрытия 30. В результате этого пусковая кнопка закрытия 30 воздействует на запорный рычаг 1048, смещая его против часовой стрелки (если смотреть слева), при этом он сцепляется с прилегающей поверхностью 1050 закрывающего пускового устройства 18, что, в свою очередь, препятствует освобождению закрывающего пускового устройства 18, когда пусковой механизм со сцепленной передачей 1040 находится в выдвинутом положении.
Когда закрывающее пусковое устройство 18 находится в полностью втянутом и нажатом положении, пусковое устройство 20 разблокируется и в настоящем варианте осуществления может многократно прижиматься к пистолетной рукоятке 26, приводя в действие концевой зажим 12. Как показано на чертеже, пусковой механизм со сцепленной передачей 1060 изначально находится во втянутом положении, в котором он удерживается при помощи комбинированной пружины натяжения/сжатия 1062, сжимаемой пистолетной рукояткой 26 рукоятки 6, неподвижный конец 1063 которой прикреплен к деталям 59 и 60, а ее подвижный конец 1064 прикреплен к загнутому вниз проксимальному втянутому концу 1067 стальной ленты 1066.
Дистально расположенный конец 1068 стальной ленты 1066 прикреплен к шарнирной муфте 1070, выдерживающей конструкционную нагрузку. Муфта, в свою очередь, соединяется с передним соединительным элементом 1072а из множества соединительных элементов 1072a-1072d, образующих соединительную рейку 1074. Соединительная рейка 1074 является гибкой, однако имеет дистальные соединительные элементы, образующие блок прямой жесткой рейки, которая способна передавать значительное ударное усилие посредством выталкивающего стержня 1010 в стволе 6, втянутого в пистолетную рукоятку 26, что позволяет уменьшить осевую длину рукоятки 6. Очевидно, что наличие комбинированной пружины натяжения/сжатия 1062 по сравнению с одиночной пружиной позволяет усилить ударное движение и при этом по существу вдвое сократить минимальную длину. Пусковое устройство 20 вращается вокруг штифта пускового устройства 96, соединенного с деталями рукоятки 59 и 60. По мере того как пусковое устройство 20 прижимается к пистолетной рукоятке 26, растягивая проксимально расположенную пружину натяжения пускового механизма 222, сцепленную проксимально между верхней частью 228 пускового устройства 20 и деталями 59 и 60, верхняя часть 228 пускового устройства 20 перемещается в дистальном направлении вокруг штифта пускового устройства 96. Верхняя часть 228 пускового устройства 20 сцепляется с соединительной рейкой 1074 во время каждого нажатия на рукоятку пускового устройства при помощи тягового смещающего механизма 1078, который расцепляется при отпускании пускового устройства 20. Пружина натяжения пускового устройства 222 при отпускании толкает пусковое устройство 20 в дистальном направлении и расцепляет тяговый смещающий механизм 1078.
При приведении в действие пускового механизма со сцепленной передачей 1040 промежуточное зубчатое колесо 1080 поворачивается по часовой стрелке (если смотреть слева), сцепляясь с зубчатой передней поверхностью 1082 соединительной рейки 1074. Вращение соединяется с механизмом передачи к индикатору 1084, который таким образом поворачивается против часовой стрелки в ответ на движение промежуточного зубчатого колеса 1080. Как промежуточное зубчатое колесо 1080, так и механизм передачи к индикатору 1084 соединены с возможностью вращения с деталями 59 и 60 рукоятки 6. Передаточное отношение между соединительной рейкой 1074, промежуточным колесом 1080 и индикаторным колесом 1084 может выбираться таким образом, чтобы зубчатая верхняя поверхность 1082 имела достаточно крепкие зубцы подходящих размеров для того, чтобы индикатор 1084 совершал не более одного оборота во время полного ударного движения сочлененного пускового механизма 1060.
Механизм передачи к индикатору 1084 выполняет по меньшей мере четыре функции, каждая из которых подробно рассмотрена ниже. Во-первых, когда соединительная рейка 1074 полностью втянута, а оба пусковых устройства 18 и 20 находятся в открытом положении, как показано на Фиг. 42, отверстие 1086 в круговом гребне 1088 с левой стороны механизма передачи к индикатору 1084 приведено к передней поверхности 1090 запорного рычага 1048. Запорный рычаг 1048 перемещается в отверстие 1086 под действием закрывающего пускового устройства 18, которое, в свою очередь, переводится в открытое положение под действием пружины натяжения закрывающего пускового устройства 1092. Пружина натяжения закрывающего пускового устройства 1092 проксимально присоединяется к верхней части 1094 закрывающего пускового устройства 18 и деталям рукоятки 59 и 60 и, таким образом, получает энергию, аккумулированную во время закрывания закрывающего пускового устройства 18. Энергия толкает закрывающее пусковое устройство 18 в дистальном направлении, перемещая его в открытое положение.
Вторая функция механизма передачи к индикатору 1084 состоит в том, что он сообщается с роликом индикации втягивания 1096, размещенным снаружи на рукоятке 6. Таким образом, механизм передачи к индикатору 1084 сообщает относительное положение пускового механизма 1060 ролику индикации втягивания 1096, благодаря чему хирург получает визуальную информацию о количестве ходов пускового устройства 20, которая необходима для завершения манипуляции.
Третья функция механизма передачи к индикатору 1084 состоит в продольном и угловом перемещении пускового рычага с блокировкой обратного хода 1098 механизма блокировки обратного хода (механизм одностороннего вращения) 1097 во время работы сшивающего и рассекающего хирургического инструмента 10. Во время работы проксимальное перемещение пускового рычага с блокировкой обратного хода 1098 с помощью механизма передачи к индикатору 1084 приводит в действие механизм блокировки обратного хода 1097, который обеспечивает перемещение стержня пускового механизма 1010 в дистальном направлении и препятствует движению стержня пускового механизма 1010 в проксимальном направлении. В результате этого движения пусковая кнопка блокировки обратного хода 1100 выдвигается на проксимальном конце деталей рукоятки 59 и 60, и оператор может воспользоваться кнопкой, если во время работы необходимо втянуть пусковой механизм со сцепленной передачей 1060. По завершении работы механизм передачи к индикатору 1084 изменяет направление вращения по мере притягивания пускового механизма 1060. Вращение в обратном направлении приводит к деактивации механизма блокировки обратного хода 1097, инициирует втягивание пусковой кнопки блокировки обратного хода 1100 в рукоятку 6 и поворот пускового рычага с блокировкой обратного хода 1098 вправо, позволяя механизму передачи к индикатору 1084 непрерывно вращаться в обратном направлении.
Четвертая функция механизма передачи к индикатору 1084 состоит в том, что он получает момент от вращения ролика индикации втягивания 1096 вручную (по часовой стрелке, как показано на Фиг. 42), обеспечивающий втягивание пускового механизма 1060 с разблокированным механизмом блокировки обратного хода 1097. Это позволяет преодолеть застревание пускового механизма 1060, которое нельзя преодолеть при помощи комбинированной пружины натяжения/сжатия 1062. Ручное втягивание может применяться после частичного срабатывания пускового механизма 1060, в противном случае срабатывает механизм блокировки обратного хода 1097, который заставляет пусковую кнопку блокировки обратного хода 1100 втягиваться так, что она не позволяет перемещать пусковой рычаг с блокировкой обратного хода 1098 в сторону.
Как показано на Фиг. 42-43, механизм блокировки обратного хода 1097 состоит из доступного для оператора пускового рычага с блокировкой обратного хода 1098, проксимальный конец которого функционально соединен с пусковой кнопкой блокировки обратного хода 1100, а дистальный конец соединен с вилкой блокировки обратного хода 1102. Более конкретно, дистальный конец 1099 пускового рычага с блокировкой обратного хода 1098 сцепляется с вилкой блокировки обратного хода 1102 при помощи штифта для вилки блокировки обратного хода 1104. Вилка блокировки обратного хода 1102 перемещается в осевом направлении, сообщая вращение гильзе с криволинейным пазом для блокировки обратного хода 1106, которая фиксируется в осевом направлении с помощью деталей рукоятки 59 и 90 и охватывает выталкивающий стержень 1010 в дистальном направлении относительно места соединения выталкивающего стержня 1010 и шарнирной муфты 1070 соединительной рейки 1074. Вилка блокировки обратного хода 1102 сообщает продольное движение от пускового рычага с блокировкой обратного хода 1098 через ниппель гильзы с криволинейным пазом 1108 гильзе с криволинейным пазом для блокировки обратного хода 1106. Таким образом, продольное перемещение ниппеля гильзы с криволинейным пазом 1108 в скошенном пазу гильзы с криволинейным пазом для блокировки обратного хода 1106 заставляет вращаться гильзу с криволинейным пазом для блокировки обратного хода 1106.
Между проксимальным концом рамки 1016 и гильзой с криволинейным пазом для блокировки обратного хода 1106 зажаты, соответственно, пружина сжатия механизма блокировки обратного хода 1110, пластина механизма блокировки обратного хода 1112 и кулачковый патрон механизма блокировки обратного хода 1114. Как показано на чертеже, проксимальное перемещение выталкивающего стержня 1010 заставляет пластину механизма блокировки обратного хода 1112 перевернуться, что обеспечивает более плотный фрикционный контакт с выталкивающим стержнем 1010 и препятствует дальнейшему перемещению выталкивающего стержня 1010 в проксимальном направлении.
Поворот пластины механизма блокировки обратного хода 1112 осуществляется аналогично повороту фиксатора дверцы решетки, который удерживает дверцу решетки в открытом положении, когда гильза с криволинейным пазом для блокировки обратного хода 1106 подходит близко к кулачковому патрону механизма блокировки обратного хода 1114. Более конкретно, пружина сжатия механизма блокировки обратного хода 1110, воздействуя на верхнюю поверхность пластины 1112, переворачивает пластину механизма блокировки обратного хода 1112, переводя ее в закрытое положение. Вращение гильзы с криволинейным пазом для блокировки обратного хода 1106 инициирует криволинейное перемещение кулачкового патрона механизма блокировки обратного хода 1114 в дистальном направлении, в результате чего верхняя часть пластины механизма блокировки обратного хода 1112 прижимается в дистальном направлении, преодолевая силу воздействия сжимающей пружины механизма блокировки обратного хода 1110. Таким образом пластина механизма блокировки обратного хода 1112 устанавливается в перпендикулярное разблокированное положение, позволяющее втягивать пусковой стержень 1010 в проксимальном направлении.
Как показано на Фиг. 43, тяговый смещающий механизм 1078 включает предохранитель 1116, на котором есть выступающий в дистальном направлении узкий кончик 1118 и выступающий справа боковой штифт 1120, размещенный на проксимальном конце предохранителя и вставленный с возможностью вращения в отверстие 1076 в верхней части 230 пускового устройства 20. С правой стороны пускового устройства 20 боковой штифт 1120 принимает смещающий элемент, представленный в виде смещающего колеса 1122. По мере того как пусковое устройство 20 перемещается вперед и назад, смещающее колесо 1122 проходит по дуге проксимально правой половине детали 59 рукоятки 6, в дистальной части выходя за пределы смещающей направляющей 1124, встроенной в правую половину детали 59. Смещающее колесо 1122 предпочтительно может быть выполнено из упругого фрикционного материала, который позволит осуществлять вращение против часовой стрелки (если смотреть слева) на боковом штифте 1120 предохранителя 1116, смещая таким образом дистально выступающий узкий кончик 1118 в направлении вниз, на центральную направляющую дорожку 1075 ближайшего соединительного элемента 1072a-d, обеспечивая таким образом сцепление с соединительной рейкой 1074.
При отпускании пускового устройства 20 смещающее колесо 1122 обеспечивает тяговое смещение предохранителя 1116 в противоположном направлении, вынимая узкий кончик 1118 из центральной направляющей дорожки 1075 соединительной рейки 1074. Для обеспечения расцепления кончика 1118 в случае сильной нагрузки и почти полного дистального перемещения предохранителя 1116 правая сторона предохранителя 1116 направлена проксимально и обращена вверх к скошенной поверхности 1126 на правой стороне замыкающей вилки сцепления 250 для отсоединения узкого кончика 1118 от центральной наклонной дорожки 1075. При отпускании пускового устройства 20 в любой момент до или после завершения полного хода, смещающее колесо 1122 позволяет поднимать и извлекать узкий кончик 1118 из центральной направляющей дорожки 1075. Несмотря на то что на чертеже показано смещающее колесо 1122, необходимо понимать, что форма смещающего элемента или колеса 1122 представлена в иллюстративных целях и может варьироваться, а смещающий элемент может иметь любую форму, позволяющую использовать силу трения или тяги для работы концевого зажима 12.
Различные варианты осуществления хирургического инструмента 10 оснащены средствами регистрации условий работы инструмента в один или более моментов времени. На Фиг. 44 представлена блок-схема системы 2000 регистрации параметров работы инструмента 10. Необходимо понимать, что такая система 2000 может использоваться в вариантах осуществления инструмента 10, оснащенных электроприводом, например, в вариантах осуществления, описанных выше и показанных на Фиг. 1-40, а также в вариантах осуществления инструмента 10 с механическим приводом, например, в вариантах осуществления, описанных выше и показанных на Фиг. 41-43.
Система 2000 может включать различные датчики 2002, 2004, 2006, 2008, 2010 и 2012 для регистрации параметров работы инструмента. Датчики могут быть установлены, например, на инструменте 10 или внутри него. В различных вариантах исполнения датчики могут быть специализированными и передавать сигнал только для системы 2000 или могут быть датчиками двойного назначения, которые выполняют другие функции в инструменте 10. Например, датчики 110, 130 и 142, как описано выше, также могут быть выполнены с возможностью передачи данных в систему 2000.
Каждый датчик напрямую или опосредованно передает сигнал в запоминающее устройство 2001, которое регистрирует сигналы, как подробно описано ниже. В качестве запоминающего устройства 2001 может использоваться любое устройство с возможностью хранения или регистрации сигналов датчиков. Например, в качестве запоминающего устройства 2001 может использоваться микропроцессор, электрически программируемое ПЗУ (EEPROM) или любое другое допустимое устройство хранения данных. Запоминающее устройство 2001 может регистрировать сигналы, передаваемые датчиками, любым допустимым для этого способом. Например, в одном варианте осуществления запоминающее устройство 2001 регистрирует сигнал, поступающий от конкретного датчика, при изменении состояния сигнала. В другом варианте исполнения запоминающее устройство 2001 может регистрировать состояние системы 2000, например сигналы всех датчиков, входящих в состав системы 2000, при изменении состояния сигнала одного из датчиков. Таким образом, возможно выполнение моментального снимка состояния инструмента 10. В различных вариантах осуществления запоминающее устройство 2001 и/или датчики могут использовать продукты с использованием однопроводной шины 1-WIRE производства компании DALLAS SEMICONDUCTOR, например, 1-WIRE EEPROM.
В различных вариантах осуществления запоминающее устройство 2001 имеет внешний доступ, что позволяет использовать внешнее устройство, например, компьютер, для доступа к параметрам работы инструмента, хранящимся в запоминающем устройстве 2001. Например, запоминающее устройство 2001 может иметь порт передачи данных 2020. Порт передачи данных 2020 обеспечивает передачу сохраненных параметров работы инструмента в соответствии с любым протоколом проводной или беспроводной связи в последовательном или параллельном формате. Запоминающее устройство 2001 также может включать сменный носитель 2021 в дополнение или вместо внешнего порта 2020. В качестве сменного носителя 2021 может использоваться любое допустимое для этих целей устройство хранения данных, которое может быть извлечено из инструмента 10. Например, съемный носитель 2021 может включать любой тип флеш-накопителя, такой как карта памяти Международной ассоциации по картам памяти персональных компьютеров (PCMCIA), карта COMPACTFLASH, карта MULTIMEDIA, карта FLASHMEDIA и др. Съемный носитель 2021 может также включать любой вид дискового устройства хранения, включая, например, съемный жесткий диск, компакт-диск (CD), цифровой видеодиск (DVD) и др.
Датчик закрывающего пускового устройства 2002 контролирует состояние закрывающего пускового устройства 18. На Фиг. 45 и 46 представлен пример варианта осуществления датчика закрывающего пускового устройства 2002. На Фиг. 45 и 46 датчик закрывающего пускового устройства 2002 размещен между закрывающим пусковым устройством 18 и шарнирным штифтом 252. Необходимо понимать, что во время прижимания закрывающего пускового устройства 18 к пистолетной рукоятке 26 закрывающее пусковое устройство 18 воздействует с определенным усилием на шарнирный штифт 252. Датчик 2002 может регистрировать усилие и в ответ на него генерировать сигнал, например, как описано выше в отношении датчика 110 и показано на Фиг. 10A и 10B. В различных вариантах осуществления в качестве датчика закрывающего пускового устройства 2002 может использоваться цифровой датчик, который показывает только то, приведено ли закрывающее пусковое устройство 18 в действие или нет. В различных вариантах осуществления в качестве датчика закрывающего пускового устройства 2002 может использоваться аналоговый датчик, который показывает усилие, воздействующее на закрывающее пусковое устройство 18 и/или положение закрывающего пускового устройства 18. Если в качестве датчика закрывающего пускового устройства 2002 используется аналоговый датчик, по логике между датчиком 2002 и запоминающим устройством 2001 нужно разместить аналого-цифровой преобразователь. Однако необходимо понимать, что датчик закрывающего пускового устройства 2002 может быть выполнен в любой допустимой для этих целей форме и может быть размещен в любом допустимом месте, позволяющем регистрировать параметры работы закрывающего пускового устройства.
Датчик закрытия упорной пластины 2004 может контролировать закрытие упорной пластины 24. На Фиг. 47 представлен пример варианта осуществления датчика закрытия упорной пластины 2004. Датчик 2004 установлен рядом или внутри серповидных отверстий 1006 канала для скобок 22, как показано на чертеже. При закрытии упорной пластины 24 шарнирные штифты упорной пластины 25 скользят в серповидных отверстиях 1006, контактируя с датчиком 2004 и заставляя датчик 2004 генерировать сигнал о том, что упорная пластина 24 находится в закрытом положении. В качестве датчика 2004 может использоваться цифровой или аналоговый датчик любого типа, подходящего для этих целей, в том числе бесконтактный датчик и т. п. Необходимо понимать, что, если в качестве датчика 2004 закрытия упорного элемента используется аналоговый датчик, между датчиком 2004 и запоминающим устройством 2001 нужно разместить аналого-цифровой преобразователь.
Как показано на чертеже, тензодатчик закрытия упорной пластины 2006 размещается на внутренней нижней поверхности канала для скобок 22. На практике датчик 2006 может контактировать с нижней стороной картриджа со скобками 34 (не показан на Фиг. 46). При закрытии упорного элемента 24 к кассете со скобками 34 прикладывается сила, которая передается на датчик 2006. В ответ на это датчик 2006 генерирует сигнал. Сигнал может быть аналоговым и пропорциональным усилию, с которым картридж со скобками 34 воздействует на датчик 2006 при закрытии упорной пластины 24. Как показано на Фиг. 44, аналоговый сигнал подается в аналого-цифровой преобразователь 2014, который в свою очередь перед подачей сигнала в запоминающее устройство 2001 преобразует его из аналоговой в цифровую форму. Необходимо понимать, что варианты осуществления изобретения, в которых в качестве датчика 2006 используется цифровой или бинарный датчик, могут не предусматривать в составе аналого-цифрового преобразователя 2014.
Датчик пускового устройства 110 контролирует положение и/или состояние пускового устройства 20. В вариантах осуществления хирургического инструмента с механическим двигателем датчик пускового устройства может попутно функционировать в качестве датчика запуска двигателя 110, описанного выше. Кроме того, датчик пускового устройства 110 может быть выполнен в любой из описанных выше форм. Он также может быть цифровым или аналоговым. На Фиг. 45 и 46 представлен дополнительный вариант осуществления датчика пускового устройства 110. На Фиг. 45 и 46 датчик пускового устройства размещен между пусковым устройством 20 и шарнирным штифтом пускового устройства 96. При натяжении пусковое устройство 20 воздействует на шарнирный штифт пускового механизма 96 с определенным усилием, регистрируемым датчиком 110. Как показано на Фиг. 44, в таких вариантах осуществления, в которых передача данных датчиком пускового устройства 110 осуществляется в аналоговой форме, по логике между датчиком пускового устройства 110 и запоминающим устройством 2001 установлен аналого-цифровой преобразователь 2016.
Датчик положения скальпеля 2008 контролирует положение скальпеля 32 или режущей поверхности 1027 в канале для скобок 22. На Фиг. 47 и 48 представлены варианты осуществления датчика положения скальпеля 2008, которые могут использоваться совместно со стержнем с механическим приводом 8 и концевым зажимом 12, показанными на Фиг. 41. Датчик 2008 включает магнит 2009, соединенный с выталкивающим стержнем 1022 инструмента 10. Пружина 2011 находится вокруг выталкивающего стержня 1022 и может быть установлена, например, вдоль продольной выемки 1014 выталкивающего кюветообразного элемента 1012 (см. Фиг. 41). По мере перемещения скальпеля 32 и режущей поверхности 1027 по каналу для скобок 22 выталкивающий стержень 1022 и магнит 2009 могут совершать возвратно-поступательное движение в спиральной пружине 2011. Такое движение относительно спиральной пружины создает в спиральной пружине напряжение, пропорциональное положению выталкивающего стержня внутри спиральной пружины и режущей кромки 1027 в канале для скобок 22. Напряжение передается в запоминающее устройство 2001, например, через аналого-цифровой преобразователь 2018.
В различных вариантах осуществления датчик положения скальпеля 2008 может быть заменен серией цифровых датчиков (не показаны), размещенных в различных точках на стержне 8 или внутри него. Цифровые датчики могут контролировать элементы выталкивающего стержня 1022, например, магнит 2009, при прохождении этого элемента по стержню 8. Положение выталкивающего стержня 1022 внутри стержня 8 и при выдвижении, а также положение скальпеля 32 в канале для скобок 22 может приблизительно соответствовать положению последнего сработавшего датчика.
Необходимо понимать, что положение скальпеля регистрируется в вариантах осуществления инструмента 10 с концевым зажимом 12 и стержнем 8 с поворотным приводом, например, как описано выше и показано на Фиг. 3-6. Датчик положения, например, датчик положения 268, может быть выполнен с возможностью генерировать сигнал, пропорциональный вращению винтового стержня 36 или любого другого приводного стержня или передаточного устройства. Так как вращение стержня 36 или любого другого приводного стержня или передаточного устройства пропорционально движению скальпеля 32 по каналу 22, сигнал, генерируемый датчиком положения 268, также пропорционален перемещению скальпеля 32. Таким образом, данные датчика положения 268 могут передаваться в запоминающее устройство 2001.
Датчик наличия картриджа 2010 контролирует наличие картриджа со скобками 34 в канале для скобок 22. В инструментах с механическим приводом датчик наличия картриджа 2010 также может функционировать в качестве датчика блокировки картриджа 136, описанного выше и показанного на Фиг. 11. На Фиг. 50 и 51 представлен вариант осуществления датчика наличия картриджа 2010. В представленном варианте осуществления изобретения датчик наличия картриджа 2010 имеет два контакта - 2011 и 2013. В случае отсутствия картриджа 34 контакты 2011 и 2013 образуют разомкнутую цепь. При наличии картриджа 34 лоток 1028 картриджа со скобками 34 взаимодействует с контактами 2011 и 2013, образуя замкнутую цепь. При разомкнутой цепи датчик 2010 может передавать логический ноль. При замкнутой цепи датчик 2010 может передавать логическую единицу. Данные с датчика 2010 передаются в запоминающее устройство 2001, как показано на Фиг. 44.
Датчик состояния картриджа 2012 контролирует расход скобок в картридже 34, вставленном в канал для скобок 22. При продвижении по концевому зажиму 12 скальпель 32 толкает салазки 33, которые приводят в действие картридж со скобками. Затем скальпель 32 возвращается в исходное положение, оставляя салазки 33 на дистальном конце картриджа. Без направляющих салазок 33 скальпель 32 может падать в блокировочный карман 2022. Датчик 2012 может контролировать наличие скальпеля 32 в блокировочном кармане 2022, что косвенно свидетельствует о недостатке скобок в картридже 34. Следует иметь в виду, что в различных вариантах исполнения датчик 2012 может напрямую сигнализировать о наличии салазок у проксимального конца кассеты 34, тем самым устраняя потребность в перемещении ножа 32 в блокировочный карман 2022.
На Фиг. 52A и 52B представлена последовательность операций 2200 для вариантов осуществления хирургического инструмента 10, используемого в качестве эндокатера с возможностью регистрации параметров работы инструмента в соответствии с различными вариантами осуществления. Как показано в блоке 2202, упорная пластина 24 инструмента 10 может быть закрыта. Это приводит к изменению состояния датчика закрывающего пускового устройства 2002 и (или) датчика закрытия упорной пластины 2006. В ответ запоминающее устройство 2001 может регистрировать состояние всех датчиков в системе 2000, как показано в блоке 2203. Как показано в блоке 2204, инструмент 10 может быть введен в организм пациента. После введения инструмента в организм пациента упорная пластина 24 может быть открыта и закрыта, как показано в блоке 2206, например, для выполнения манипуляций с тканью на операционном поле. Каждое открытие и закрытие упорной пластины 24 вызывает изменение состояния датчика закрывающего пускового устройства 2002 и/или датчика закрытия упорной пластины 2004. В ответ запоминающее устройство 2001 регистрирует состояние системы 2000, как показано в блоке 2205.
Как показано в блоке 2208, ткань фиксируется для последующего рассечения и сшивания скобками. Если упорная пластина 24 не закрыта, в соответствии с блоком принятия решений 2210 требуется дальнейшая фиксация. Если упорный элемент 24 закрыт, то состояние датчиков 2002, 2004 и/или 2006 может измениться, позволяя запоминающему устройству 2001 записать состояние системы в блок 2213. Регистрация данных может включать регистрацию данных давления при закрытии, полученных от датчика 2006. Как показано в блоке 2212, далее может выполняться рассечение и сшивание скобками. Датчик пускового устройства 110 может изменить состояние по мере натяжения пускового устройства 20 в направлении пистолетной рукоятки 26. Кроме того, при перемещении скальпеля 32 по каналу для скобок 22 датчик положения скальпеля 2008 изменяет состояние. В ответ запоминающее устройство 2001 может регистрировать состояние системы 2000 в соответствии с блоком 2013.
По завершении операции рассечения и сшивания скобками скальпель 32 возвращается в исходное положение. Так как скобки в картридже 34 закончились, скальпель 32 может провалиться в блокировочный карман 2022, в результате чего изменяется состояние датчика состояния картриджа 2012, побуждая запоминающее устройство 2001 регистрировать состояние системы 2000, как показано в блоке 2015. После этого упорная пластина 24 может быть разблокирована, освобождая ткань. Данное действие может вызвать изменения состояния одного или более датчиков закрывающего пускового устройства 2002, датчика закрытия упорной пластины 2004 и тензодатчика закрытия упорной пластины 2006, в результате чего происходит регистрация состояния системы 2000, как показано в блоке 2017. После освобождения ткани упорная пластина 24 снова может быть закрыта, как показано в блоке 2220. Это вызывает другое изменение состояние у по меньшей мере датчиков 2002 и 2004, что, в свою очередь, побуждает запоминающее устройство 2001 регистрировать состояние системы, как показано в блоке 2019. Затем, инструмент 10 может быть извлечен из полости организма пациента, как показано в блоке 2222.
Если во время операции возникает необходимость повторного использования инструмента 10, как показано в блоке 2224, можно открыть упорную пластину, инициируя следующую регистрацию состояния системы, как показано в блоке 2223. Использованный картридж 34 может быть извлечен из концевого зажима 12, как показано в блоке 2226. Это вызывает изменение состояния датчика наличия картриджа 2010, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2225. В соответствии с блоком 2228, можно вставить другой картридж 34. Это вызывает изменение состояния датчика наличия картриджа 2010, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2227. Если другой картридж 34 является новым, то, согласно блоку принятия решений 2230, его установка также может вызвать изменение состояния датчика состояния картриджа 2012. В таком случае может регистрироваться состояние системы, как показано в блоке 2231.
На Фиг. 53 представлен пример распределения памяти 2300 запоминающего устройства 2001 в соответствии с различными вариантами осуществления. Схема распределения памяти 2300 состоит из ряда столбцов 2302, 2304, 2306, 2308, 2310, 2312, 2314, 2316 и строк (не обозначены). В столбце 2302 указан номер события для каждой строки. В других столбцах представлены выходные данные одного из датчиков системы 2000. Данные от всех датчиков, сохраненные в определенный момент времени, могут быть записаны в одной строке под одним и тем же номером события. Таким образом, каждая строка отражает событие, в котором зарегистрированы один или более сигналов датчиков системы 2000.
В столбце 2304 приведены данные нагрузки закрытия, зарегистрированные при каждом событии. Они отражают выходные данные тензодатчика закрытия упорной пластины 2006. В столбце 2306 отражено положение рабочего хода. Эти данные могут быть получены от датчика положения скальпеля 2008. Например, совокупное перемещение скальпеля 32 можно разделить на части. Указанное в столбце 2306 число может отражать ту часть, в которой в настоящий момент находится скальпель 32. Нагрузка при рабочем ходе представлена в столбце 2308. Эти данные могут быть получены от датчика пускового устройства 110. Положение скальпеля представлено в столбце 2310. Данные о положении скальпеля могут быть получены от датчика положения скальпеля 2008, как и данные по рабочему ходу. В столбце 2312 представлены данные о том, в каком положении находится упорная пластина 24 - в открытом или закрытом. Эти данные могут быть получены на основе сигналов датчика закрытия упорной пластины 2004 и/или тензодатчика закрытия упорной пластины 2006. Данные о наличии салазок 33 и состоянии картриджа 34 могут быть приведены в столбце 2314. Эти данные могут быть получены от датчика состояния картриджа 2012. Наконец, данные о наличии картриджа 34 могут быть представлены в столбце 2316. Эти данные могут быть получены от датчика наличия картриджа 2010. Необходимо понимать, что в запоминающем устройстве 2001 могут храниться и другие данные, отличные от тех, которые были использованы в примере, например, данные о начале и конце рабочего хода, например, полученные на основе сигналов датчиков 130 и 142.
На Фиг. 54 и 55 представлен другой вариант исполнения системы 2000. Изображенный на Фиг. 54 вариант исполнения схож с вариантом на Фиг. 44, за исключением того, что на Фиг. 54 датчики 2002-2010 связаны с устройством управления 2400, которое предпочтительно расположено в рукоятке 6 инструмента, а в наиболее предпочтительном случае находится в части пистолетной рукоятки 26 рукоятки 6. В состав устройства управления 2400 могут входить процессор 2402 и запоминающее устройство 2001. Запоминающее устройство 2001 может содержать постоянное запоминающее устройство 2404 и оперативное запоминающее устройство 2406. Устройство управления 2400 также может включать аналого-цифровые преобразователи (АЦП) и цифро-аналоговые преобразователи (ЦАП) (не показаны) для обеспечения связи с датчиками 2002-2010. ПЗУ 2404 может включать устройства памяти EPROM и/или Flash EEPROM. ОЗУ 2406 может включать кратковременную память, например, RAM (оперативную память). Различные компоненты устройства управления 2400 могут быть раздельными или могут быть объединены в один или несколько компонентов. Например, в одном из вариантов осуществления частью системы микроконтроллера или компьютерного чипа может являться процессор 2402, ПЗУ 2404, ОЗУ 2406, ЦАП и АЦП.
Устройство управления 2400 может питаться как от источника электропитания 2408, так и от батарейки. В инструментах 10 с электродвигателем постоянного тока для источника электропитания концевого манипулятора источник электропитания 2408, из которого напряжение подается на блок управления 2400, может быть тем же источником электропитания, из которого подается напряжение на электродвигатель; для подачи напряжения на блок управления 2400 и электродвигатель 65 также могут использоваться различные источники электропитания.
Данные с различных датчиков могут сохраняться в цифровой форме в одном или обоих устройствах памяти 2404 и 2406. Один из таких хирургических инструментов с приводом описан в опубликованной заявке на патент США (№ 2007/0175964 A1), которая включена в настоящий документ посредством ссылки, описывается эндокатер с устройством памяти для записи и хранения данных с датчиков. Некоторые датчики могут передавать данные в аналоговой форме. Для преобразования сигналов от таких датчиков и их сохранения в устройствах памяти 2404 и 2406 могут использоваться АЦП. Кроме того, датчики могут подключаться к устройству управления 2400 посредством проводной и/или беспроводной связи. Например, возможен обмен данными между датчиками и блоком управления 2400 через двунаправленную шину 1-WIRE или шину I2C. Для вариантов исполнения с беспроводной связью между датчиками и блоком управления 2400 в состав датчиков могут входить транспондеры, через которые выполняется обмен данными с блоком управления 2400.
Хотя это не показано на Фиг. 44, инструмент 10 может также содержать один или более датчиков шарнира, которые определяют состояние шарнира концевого манипулятора. Например, датчики шарнира могут находиться внутри или возле шарнирного соединения и определять относительное перемещение между концевым манипулятором 12 и стержнем 8. Возможен обмен данными между датчиками шарнира и блоком управления 2400, и данные, переданные датчиками шарнира, могут храниться в запоминающем устройстве 2001 блока управления 2400. Более подробная информация о таких датчиках шарниров представлена в заявке на патент США с серийным № 12/124655 под названием «Хирургический инструмент с автоматически перенастраиваемым шарнирным концевым манипулятором», поданной 21 мая 2008 года, которая включена в настоящий документ во всей своей полноте посредством ссылки. Кроме того, датчики могут включать различные датчики электродвигателя, которые определяют параметры состояния электродвигателя 65, такие как число оборотов в минуту и т. д.
В соответствии с различными вариантами исполнения данные, хранящиеся в запоминающем устройстве 2001, могут быть зашифрованы. Например, один из блоков памяти 2404, 2406, такой как ROM 2404, может хранить код шифрования или программное обеспечение, при выполнении которых процессором 2402 происходит шифрование процессором 2402 данных датчика, которые были получены от датчиков и сохранены в запоминающем устройстве 2001.
Блок управления 2400 также может быть оборудован портом вывода 2020, который доступен для удаленного компьютера 2420 через канал связи 2422, присоединенный к внешнему порту 2020. Канал связи 2422 может быть проводным или беспроводным. Например, порт вывода 2020 может содержать последовательный порт, такой как USB-порт (включая USB-порты типа A, типа B, Mini-A или Mini-B), порт с интерфейсом IEEE 1394 (включая IEEE 1394a, 1394b или 1394c), порт RS-232, порт RS-423, порт RS-485, оптические порты, такие как порты SONET или SDH, или любые другие подходящие последовательные порты для проводной последовательной передачи данных через канал связи 2422. Кроме того, канал связи 2422 может представлять собой канал параллельной передачи данных, такой как ISA, ATA, SCSI или PCI. В таких условиях порт вывода 2020 может быть соответствующим портом вывода для параллельной передачи данных. Кроме того, канал данных 2422 может быть беспроводным каналом связи, таким как связь по одному из стандартов IEEE 802.11.
Удаленный компьютер 2420 может быть любым устройством с процессором и запоминающим устройством с поддержкой обмена данными с блоком управления 2400 и загрузки данных датчиков, которые хранятся в запоминающем устройстве 2001. Например, удаленный компьютер 2420 может быть настольным компьютером, ноутбуком, сервером, рабочей станцией, карманным компьютером, миникомпьютером, носимым компьютером и т. д. Такой удаленный компьютер 2420 может находиться вне инструмента 10 (т. е. он не является частью инструмента 10) и располагаться относительно недалеко от инструмента 10 при загрузке данных в компьютер 2420, или же компьютер 2420 может находиться удаленно, например в соседней комнате или даже дальше.
На Фиг. 56 представлена технологическая блок-схема в соответствии с различными вариантами исполнения настоящего изобретения. Процесс начинается с шага 2500, на котором практикующий врач осуществляет хирургическую процедуру при помощи инструмента 10. На шаге 2502 от различных датчиков инструмента передаются данные в блок управления 2400. На шаге 2504 данные могут быть зашифрованы блоком управления 2400, а на шаге 2506 зашифрованные данные сохраняются в блоке памяти 2001. В других вариантах исполнения шифрование данных не требуется или же шифруется часть данных. Затем на шаге 2508 устанавливается канал передачи данных между удаленным компьютером 2420 и блоком управления 2400, например, при помощи порта вывода 2020. Затем на шаге 2510 некоторые или все данные датчиков, хранящиеся в блоке памяти 2001, загружаются в удаленный компьютер 2420. В вариантах исполнения с шифрованием хранимых данных удаленный компьютер 2420 может расшифровывать данные до или после их загрузки в запоминающее устройство удаленного компьютера 2420. На шаге 2512 возможна обработка данных, сохраненных в удаленный компьютер 2420. Например, возможен подсчет или анализ данных, загрузка или передача на другой носитель.
В одном варианте исполнения описанных здесь устройств в состав кассеты 34 могут входить средства передачи данных о типе установленной кассеты в датчик кассеты, установленный в инструменте 10. Кассета 34 может быть оборудована меткой радиочастотной идентификации, передающей, помимо прочего, тип кассеты. Например, при сшивании тонкой ткани пользователь может выбрать кассету, с помощью которой формируются скобки меньшей высоты по сравнению со скобками, используемыми для сшивания толстой ткани. В зависимости от типа кассеты определяется доступный для ткани зазор между пластиной кассеты и упорным элементом. Согласно существующим в данной области технологиям, кассеты производятся с высотой закрытой скобки в диапазоне от 2 до 5 мм.
Каждое значение высоты, как правило, отмечено уникальным цветом кассеты, что предоставляет пользователю визуальную обратную связь. Если пользователь предпринимает попытку установки в толстую ткань скобки из кассеты, предназначенного для тонкой ткани, он может ощутить повышенное сопротивление при замыкании браншей, а также может возникнуть повышенная нагрузка на электродвигатель при перемещении салазок 33. В данном примере в результате значительной толщины ткани, захваченной браншами, зазор между пластиной кассеты и карманами упорного элемента может быть слишком большим и привести к неправильному формированию скобок. В результате возможно кровотечение или расхождение сшитой ткани. В противоположном случае, если пользователь выбирает кассету, предназначенную для толстой ткани, высота сформированной скобки может оказаться чрезмерной, что приведет к недостаточному усилию сжатия и не сможет предотвратить кровотечение или утечку.
В ходе выталкивания скобы нагрузка на электродвигатель 65 может быть различной и зависеть от количества и типа ткани в браншах инструмента 10. Микропроцессор запоминающего устройства 2001 может быть оборудован соединением с электродвигателем 65 для регистрации некоторых параметров электродвигателя, включая частоту вращения, ток, напряжение, емкость или сопротивление, а также продолжительность такта выталкивания. Также возможна регистрация времени, даты и идентификационных данных кассеты 34 и инструмента 10. Данная информация может быть сохранена в запоминающем устройстве 2001 или передана через порт 2020 или с помощью протокола беспроводной связи в соответствии с технологиями, используемыми в данной области.
Для облегчения беспроводной передачи данных возможно оснащение инструмента 10 приемопередатчиком Bluetooth для обмена данными с любым подключенным Bluetooth-устройством в пределах диапазона передачи устройства 10. В одном из вариантов исполнения принимающее устройство может быть смартфоном с приложением, предназначенным для получения информации и ее соответствующего форматирования для отображения и управления на дисплее пользователя смартфона. Приложение может передавать полученную информацию вместе с именем пользователя, адресом электронной почты, названием медицинского учреждения или названием учетной записи и данными GPS в центральную базу данных.
Когда после выталкивания скобы параметры электродвигателя 65 оказываются переданными в центральную базу данных, алгоритм может сохранить эти данные согласно типу инструмента и кассеты. Далее алгоритм может выполнить сравнение полученной информации с известными или предполагаемыми значениями на основе комбинации инструмента 10 и кассеты 34. Например, при выталкивании скобы инструментом 10 с кассетой голубого цвета (ткань средней толщины) предполагаемая сила потребляемого электродвигателем тока может составить 3-4 А. При повышенном потреблении тока вероятно, что пользователь инструмента 10 неверно подобрал кассету. В подобном случае алгоритм может сформировать сигнал тревоги с выводом на смартфон, содержащий сообщение с параметрами электродвигателя, предупреждающее пользователя о выходе инструмента 10 за пределы заданного значения эксплуатации. Алгоритм может предложить применение другого типа кассеты 34. Это может быть выполнено в режиме реального времени, или же приложение может сформировать отчет, передаваемый пользователю по электронной почте.
Приложение может запрашивать информацию через интерфейс смартфона (или любого другого устройства, на котором возможна работа приложения согласно технологиям, используемым в данной области), такую как тип процедуры, тип ткани, имя хирурга, название медицинского учреждения. Данная информация впоследствии может быть добавлена в центральную базу данных для дальнейшего уточнения предполагаемых параметров электродвигателя.
На Фиг. 57 представлена технологическая блок-схема процесса, описанного выше. Процесс начинается на шаге 5710, где кассета 34 загружается в инструмент 10 и тип кассеты определяется датчиком кассеты. На шаге 5720 выполняется пуск инструмента 10 и данные электродвигателя от различных датчиков инструмента передаются в блок управления 2400 или сохраняются в локальной памяти. На шаге 5730 данные могут быть зашифрованы блоком управления 2400, а на шаге 5730 и 5740 зашифрованные данные сохраняются в блоке памяти 2001. В других вариантах исполнения шифрование данных не требуется или же шифруется часть данных. Затем на шаге 5750 устанавливается канал передачи данных между удаленным компьютером 2420 и блоком управления 2400, например, при помощи порта вывода 2020. При оснащении инструмента 10 приемопередающим модулем Bluetooth возможна передача данных в подсоединенное Bluetooth-устройство.
Затем на шаге 5760 часть данных или все данные датчиков, хранимые в блоке памяти 2001, передаются в подсоединенное Bluetooth-устройство, оснащенное приложением для получения, хранения и последующей передачи информации в центральную базу данных на удаленном компьютере через WiFi или сеть сотовой связи в соответствии с технологиями, используемыми в данной области. Для вариантов исполнения с шифрованием хранимых данных в подсоединенном Bluetooth-устройстве возможна дешифровка данных. На шаге 5770 данные, теперь хранимые в удаленном компьютере, сравниваются с предполагаемыми данными электродвигателя для установленного типа кассеты. Если рабочие параметры двигателя находятся за пределами заданного значения, как указано выше, приложение может передать сигнал тревоги в устройство, на котором выполняется приложение, о том, что рабочие параметры электродвигателя находятся за пределами предполагаемого диапазона.
На Фиг. 58 представлена система обмена данными в режиме реального времени или режиме практически реального времени между инструментом пользователя 10 и удаленной базой данных. Как указано выше, инструмент 10 в одном из вариантов укомплектован радиочастотным (Bluetooth) приемопередатчиком. Информация, полученная в ходе работы инструмента 10, передается через канал радиочастотной связи в мобильное устройство 5820. На мобильном устройстве 5820 в одном из вариантов выполняется приложение, сохраняющее переданную информацию. Приложение также может запрашивать информацию от пользователя, такую как хирургическая операция, наименование медицинского учреждения, имя хирурга, тип ткани, для которой был использован инструмент 10. Приложение может автоматически определять дату, время и данные GPS. Информация передается в удаленный компьютер 2420 через Интернет 5830. Программа 5840 центральной базы данных на компьютере 2420 может сохранить переданную информацию, выполнить анализ данных электродвигателя, как указано выше, и отправить информацию обратно в инструмент пользователя 10 через удаленный компьютер 2420, Интернет 5830 и устройство беспроводной связи 5820. Данная информация может включать сигнал тревоги, предупреждающий о том, что рабочие параметры электродвигателя 65 находятся за пределами предполагаемого диапазона.
Описанные в настоящем документе устройства могут быть предназначены для одноразового применения (каждая процедура может включать несколько сшиваний) или для многоразового использования. В любом случае, устройство может быть переделано для использования после по меньшей мере одной процедуры. Модернизация может включать в себя любую комбинацию этапов разборки устройства, последующей очистки или замены конкретных частей и последующей повторной сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно селективно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно снова собрать для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать различные методики разборки, очистки, замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство целиком входят в объем настоящей заявки.
Предпочтительно, чтобы описанные в настоящем документе различные варианты осуществления изобретения были обработаны перед началом хирургической операции. Сначала полученный новый или уже использованный инструмент при необходимости очищают. Затем инструмент можно стерилизовать. В одной методике стерилизации инструмент помещают в закрытый и герметичный контейнер, такой как термоформируемая пластиковая оболочка с покрытием из материала Тайвек (TYVEK). Затем тару и инструмент помещают в поле излучения, которое может проникать в тару, такое как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение уничтожает бактерии на инструменте и в таре. Стерилизованный инструмент может затем храниться в стерильной таре. Герметичная тара сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Предпочтительно осуществлять стерилизацию устройства. Это можно осуществлять несколькими способами, известными специалистам в данной области, включая бета- или гамма-излучение, оксид этилена, пар и другие способы.
Несмотря на то что настоящее изобретение проиллюстрировано с помощью описания нескольких вариантов осуществления и проиллюстрированные варианты осуществления описаны достаточно подробно, заявитель не имеет намерения ограничить или иным образом лимитировать объем изобретения такими подробностями. Дополнительные преимущества и модификации могут быть очевидными для специалистов в данной области. Различные варианты осуществления настоящего изобретения представляют обширные улучшения по сравнению с прежними способами сшивания скобами, которые требуют применения скоб различных размеров в одной кассете, чтобы получить скобы, имеющих различные сформированные (конечные) значения высот.
Соответственно, настоящее изобретение обсуждается в контексте эндоскопических операций и устройств. Тем не менее, термин «эндоскопический» в настоящем документе не может считаться ограничивающим настоящее изобретение рамками рассекающих и сшивающих хирургических аппаратов, использующихся только в сочетании с эндоскопическим каналом (т. е. канюлей или троакаром). Наоборот, предполагается, что настоящее изобретение может найти применение в любой операции, где ограничен доступ, включая, без ограничений, лапароскопические операции, а также операции из открытого доступа. Более того, уникальные и новые аспекты различных вариантов осуществления настоящего изобретения с использованием кассет со скобами могут находить применение в сочетании с другими формами сшивающих устройств, не отходя от сущности и объема настоящего изобретения.
Любой патент, публикация или информация, которая упомянута как включенная посредством ссылки в настоящее описание, в полном объеме или частично включены в него только в той мере, в которой включенный материал не противоречит существующим определениям, утверждениям или другому раскрываемому материалу, указанному в настоящем документе. Таким образом, описание, явно приведенное в настоящем документе, заменяет собой любой противоречащий материал, включенный в настоящий документ посредством ссылки.
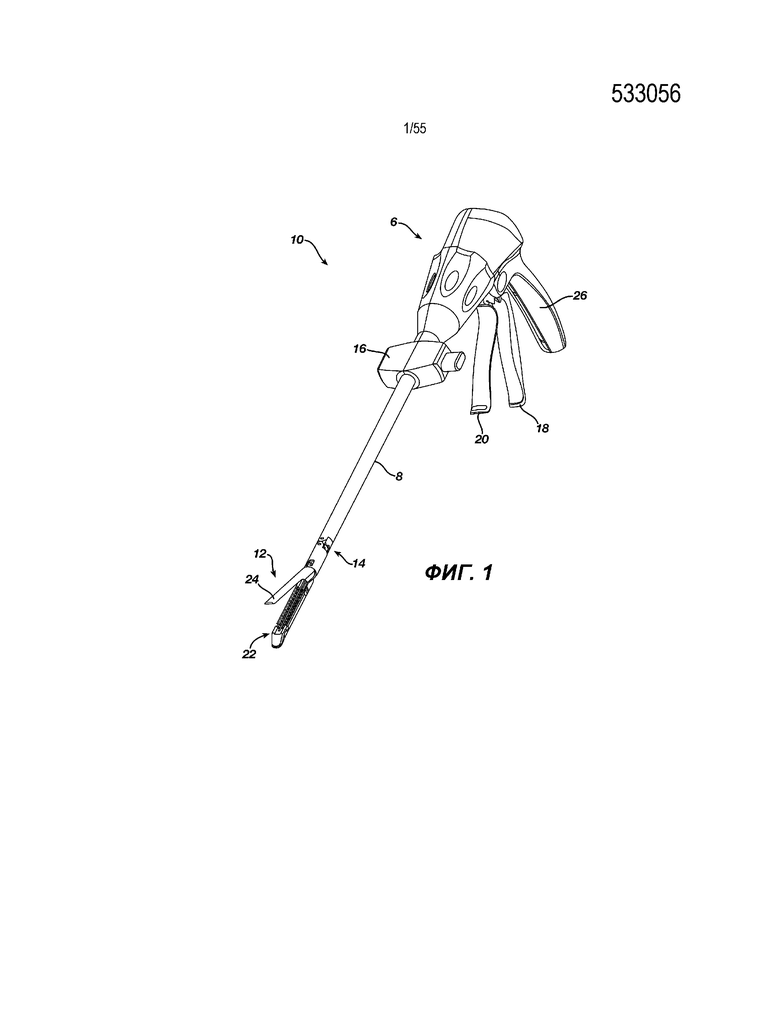
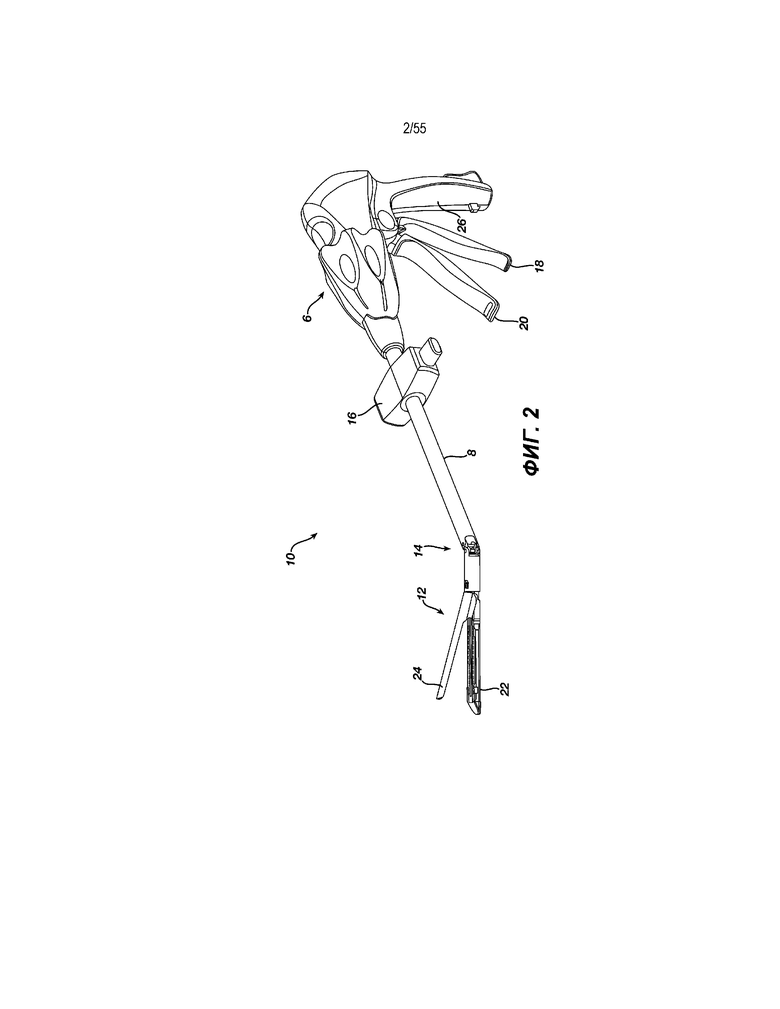
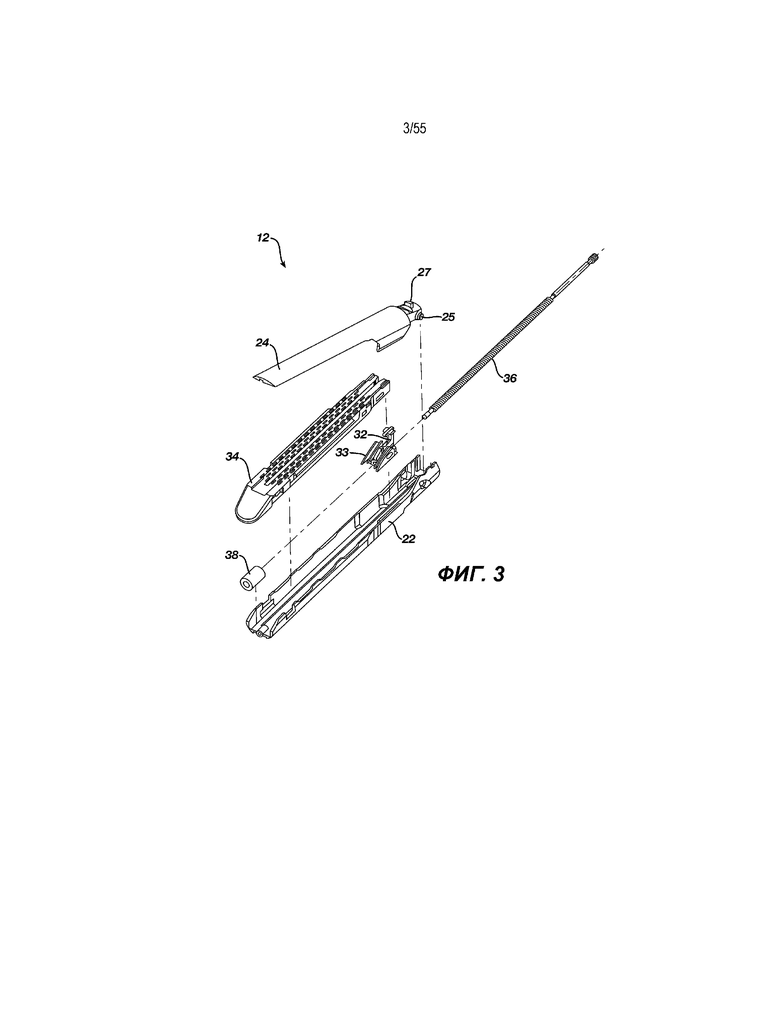
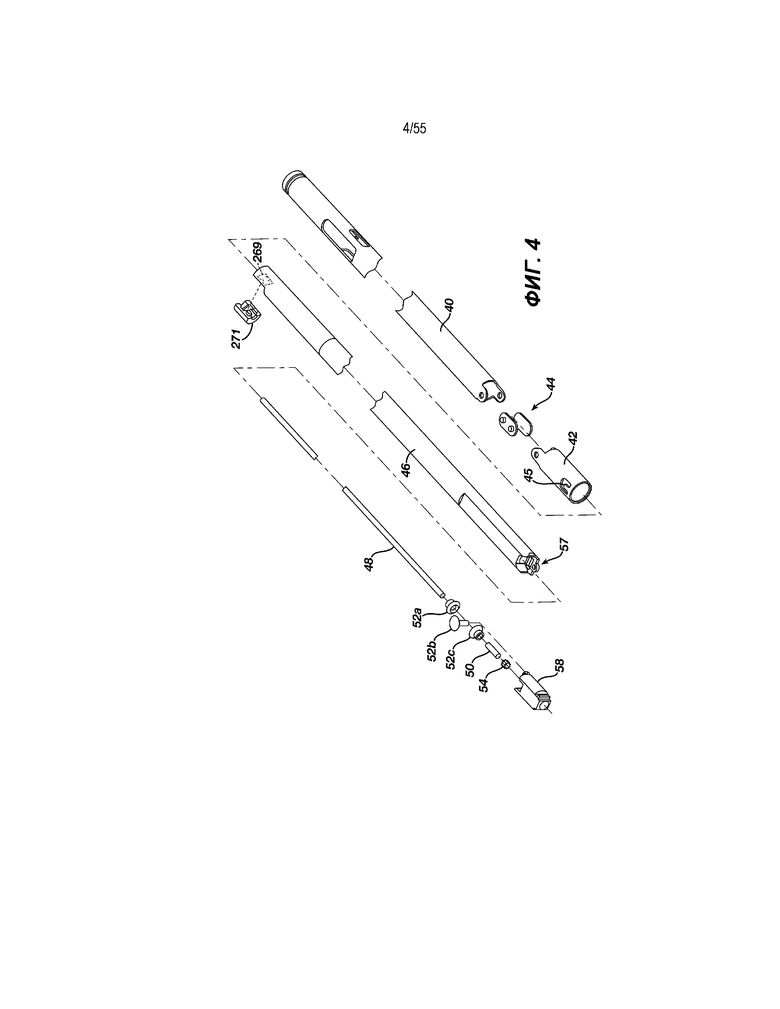
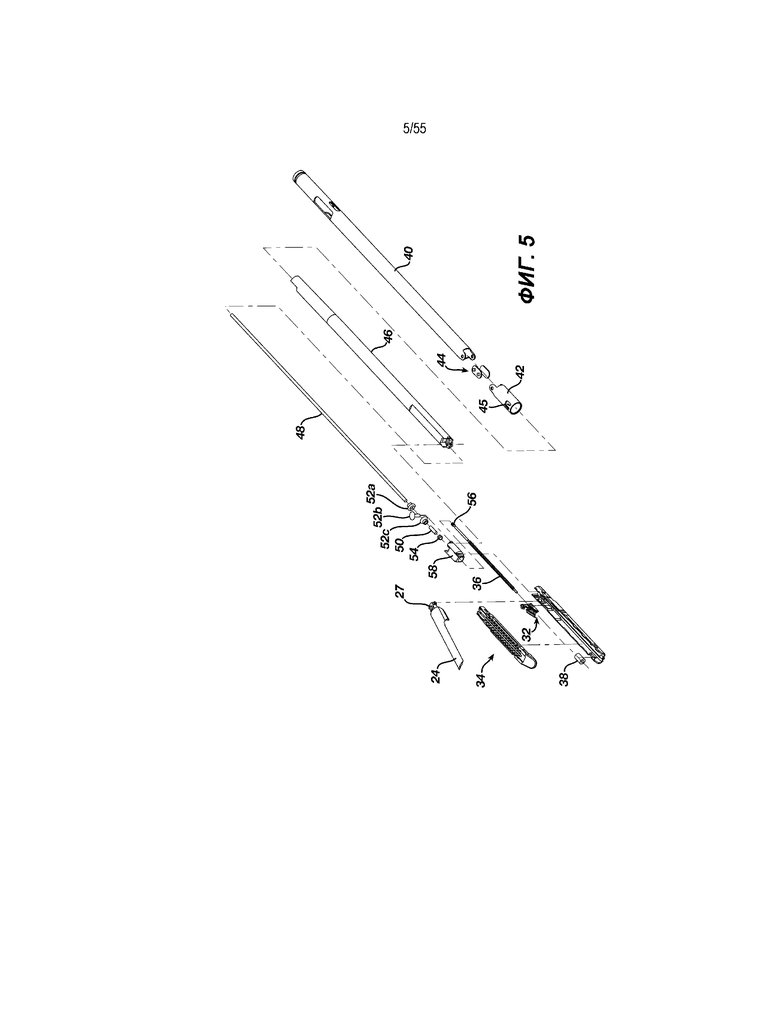
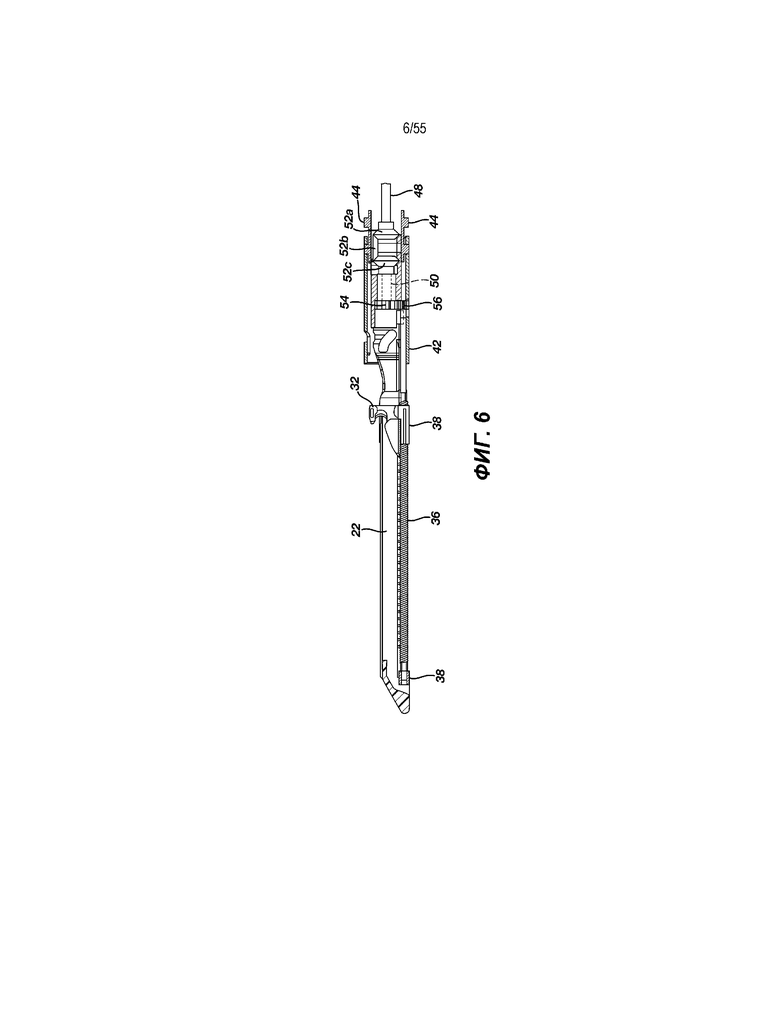
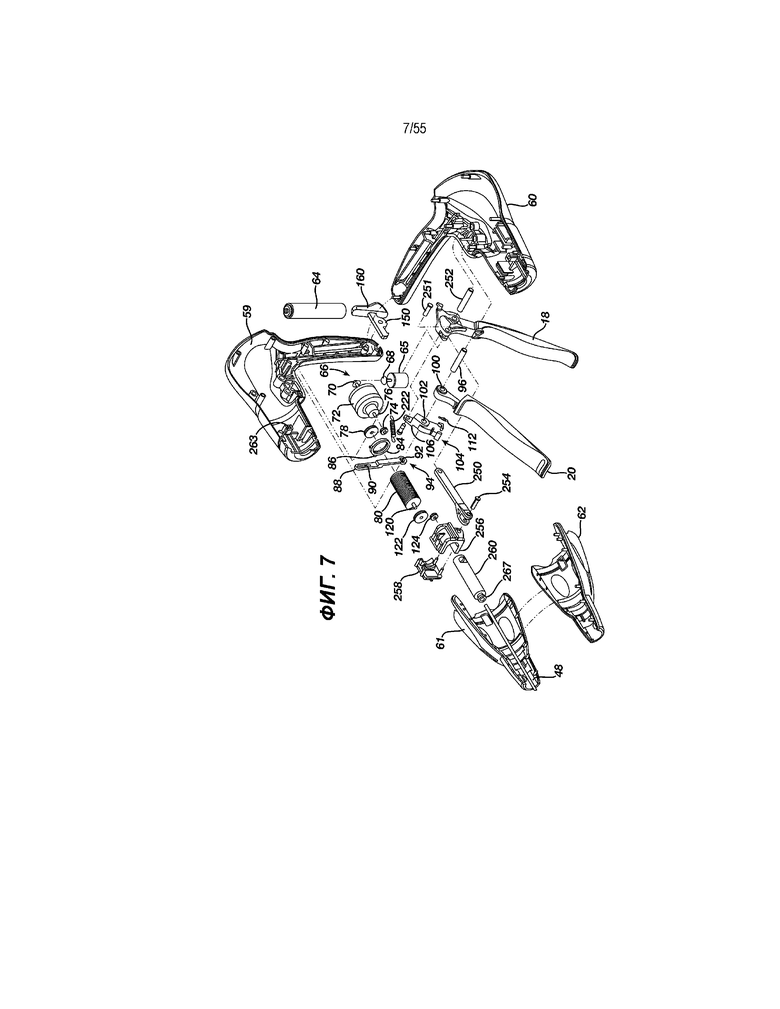
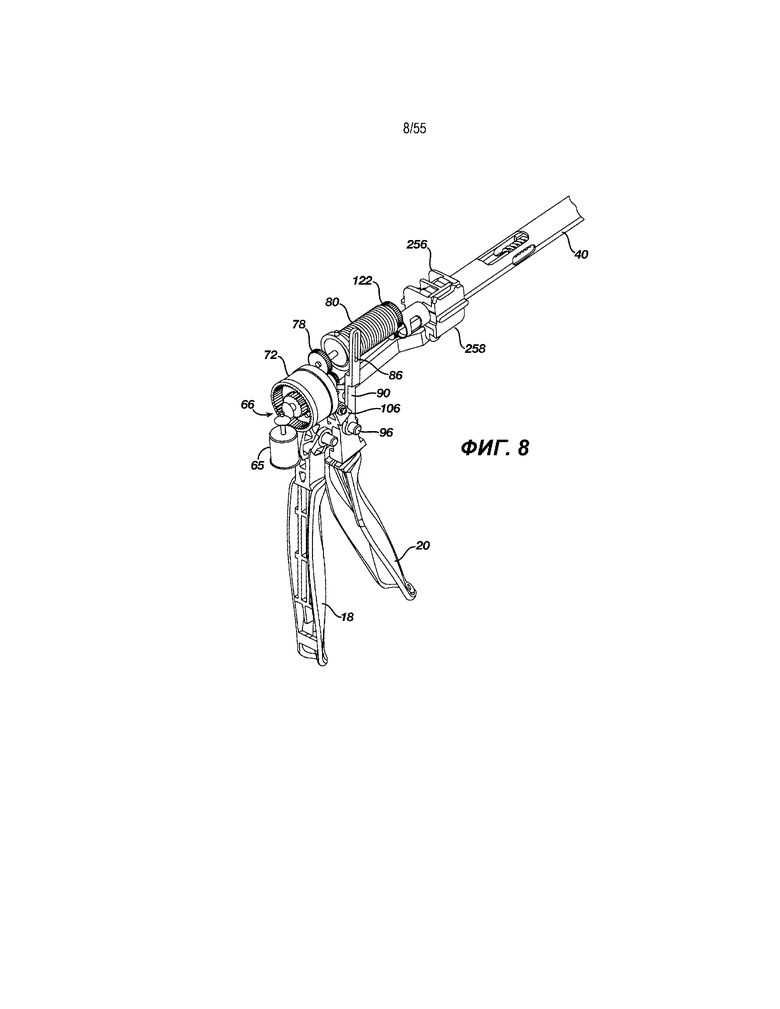
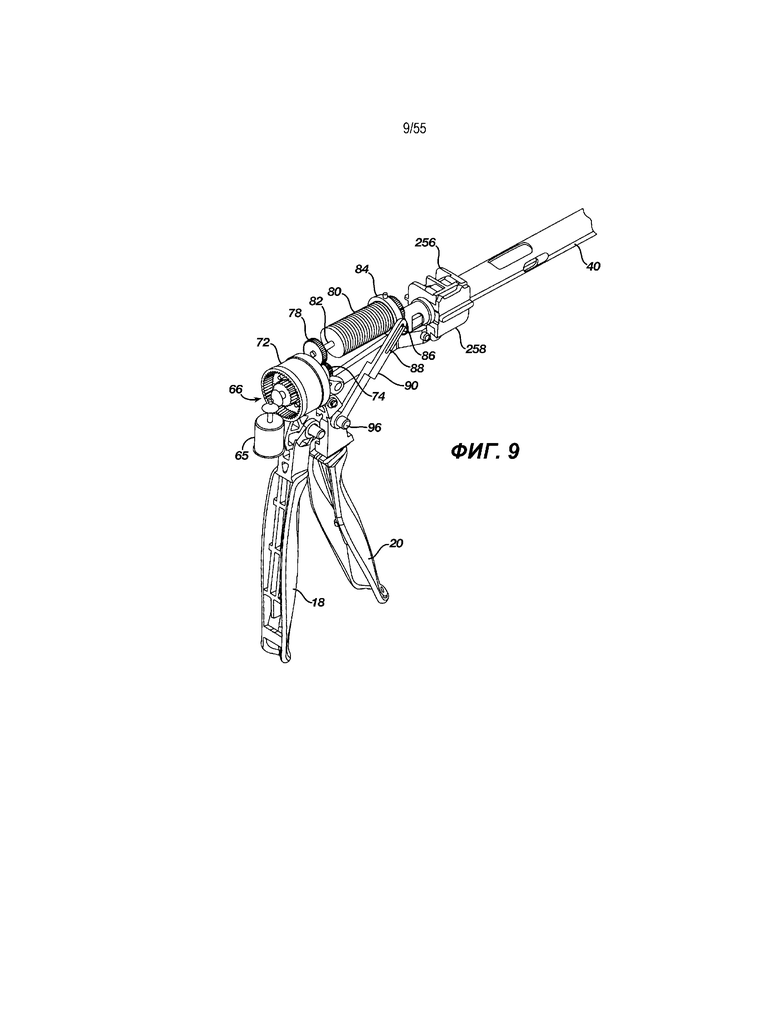
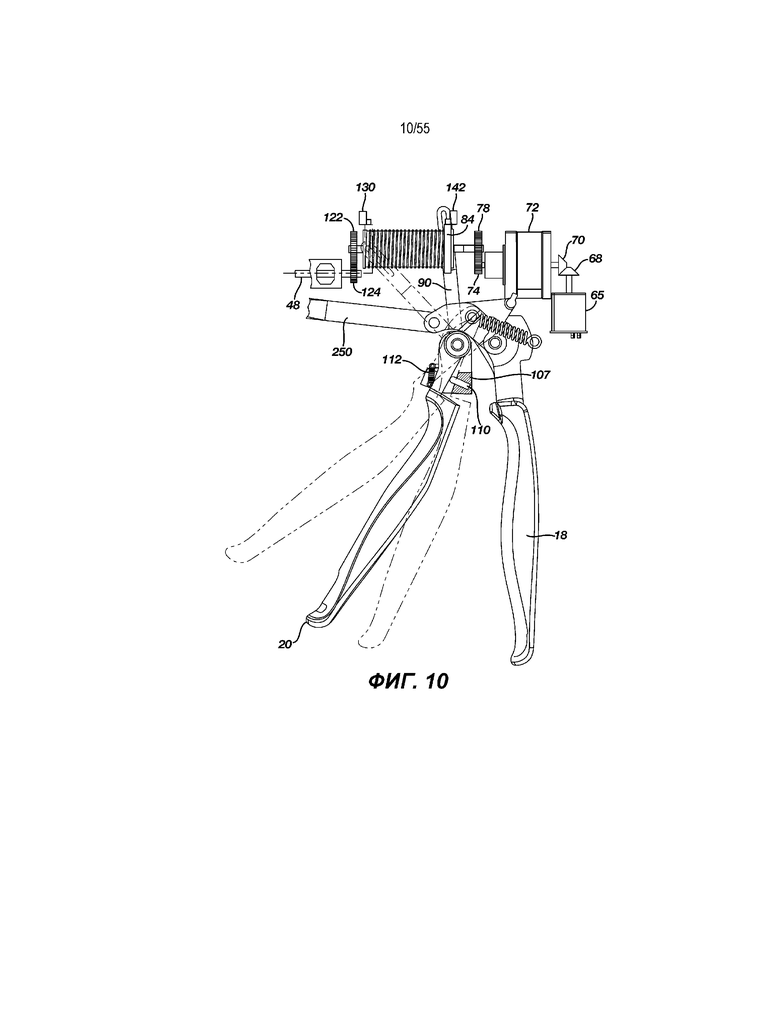
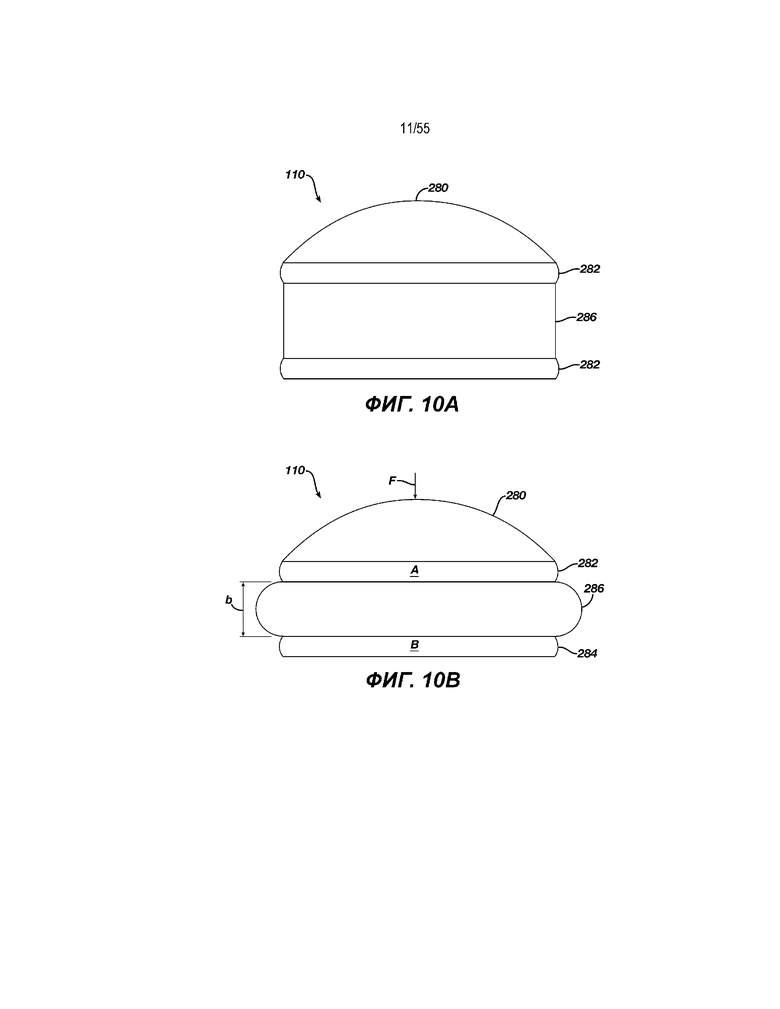
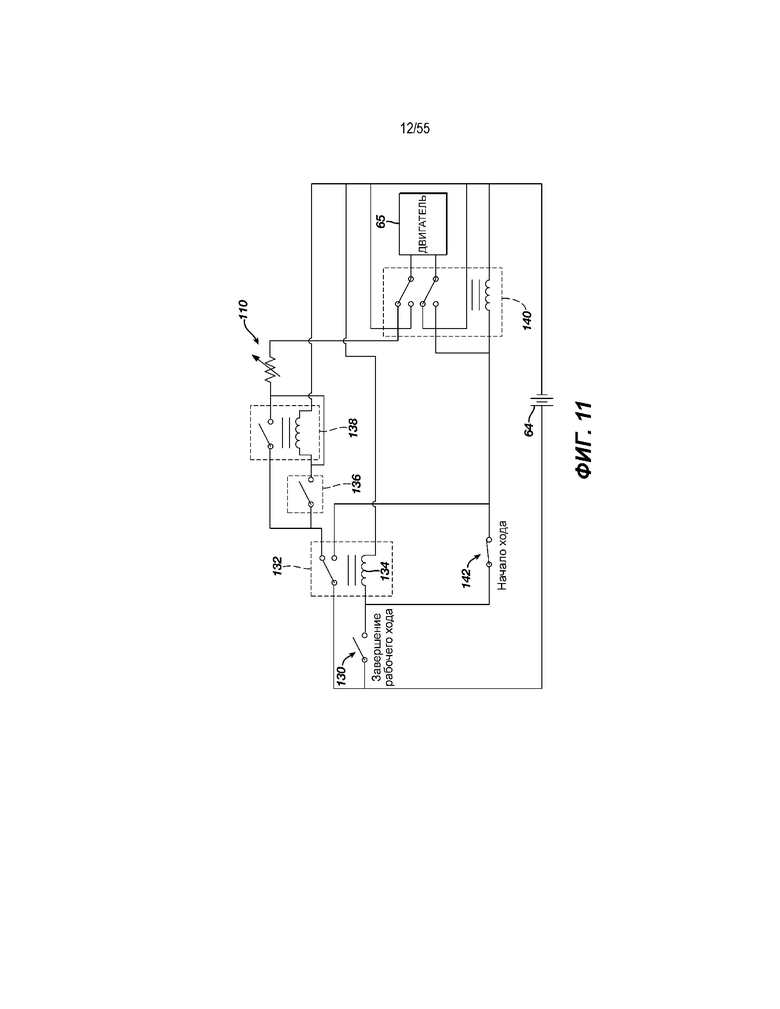
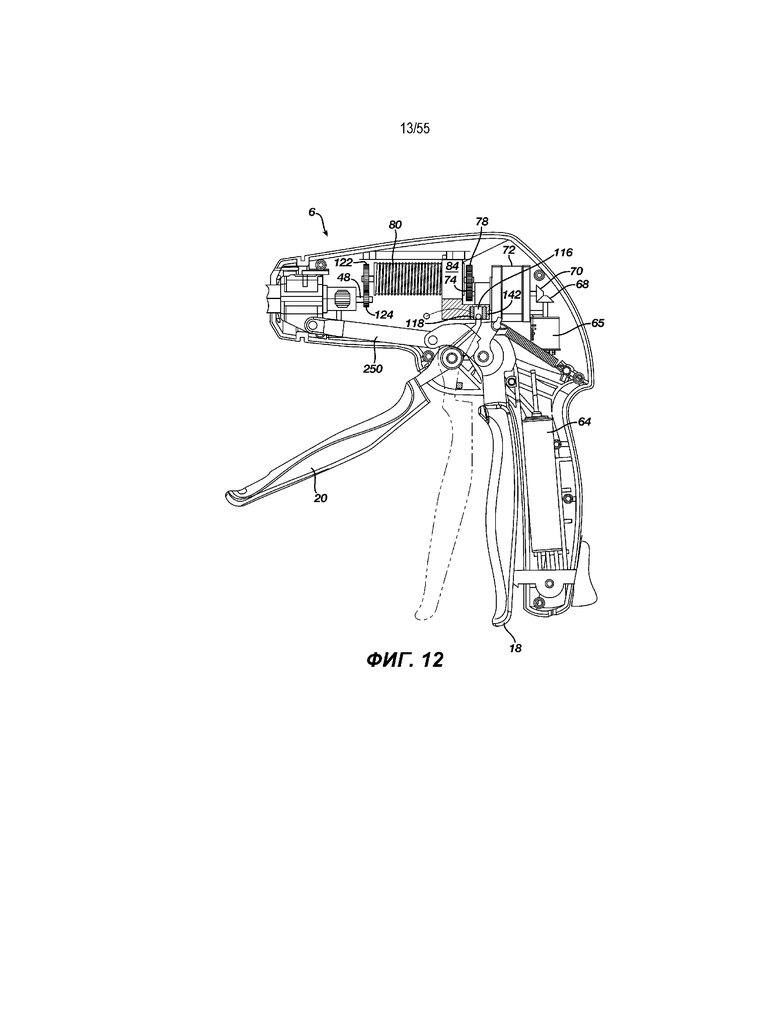
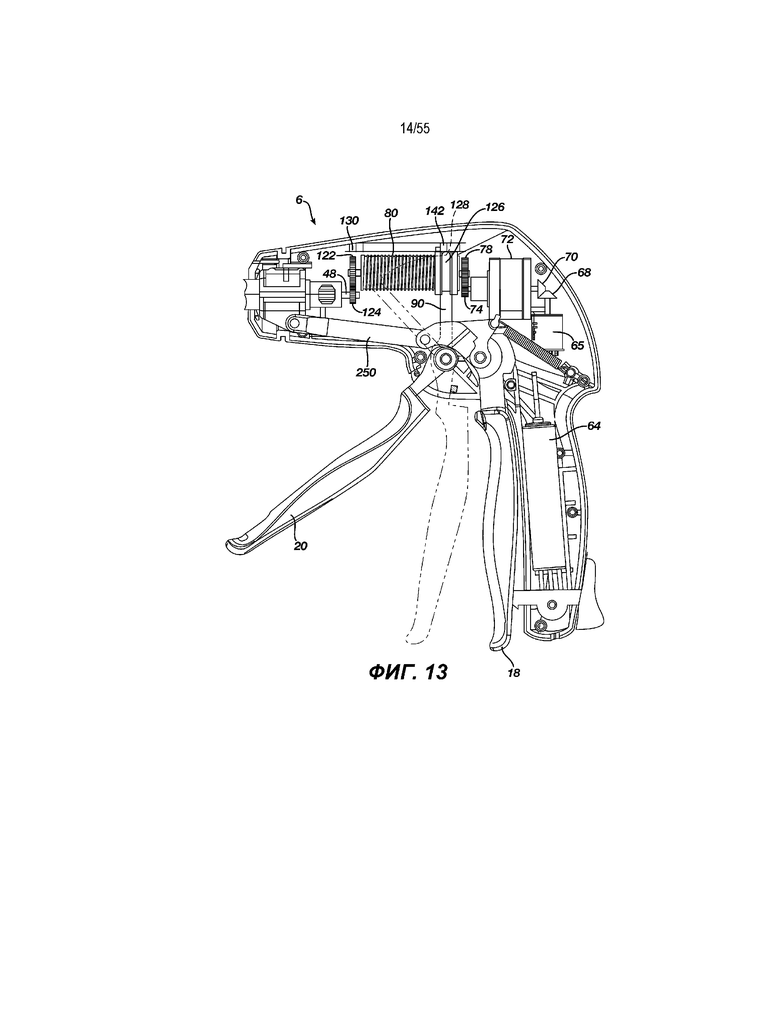
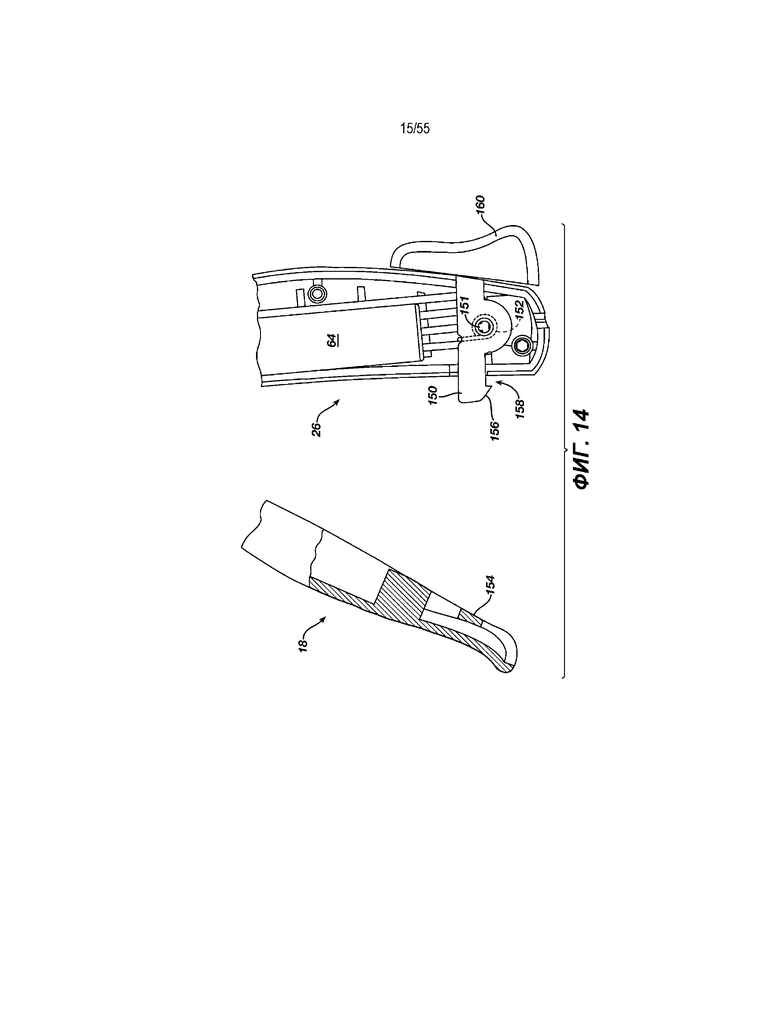
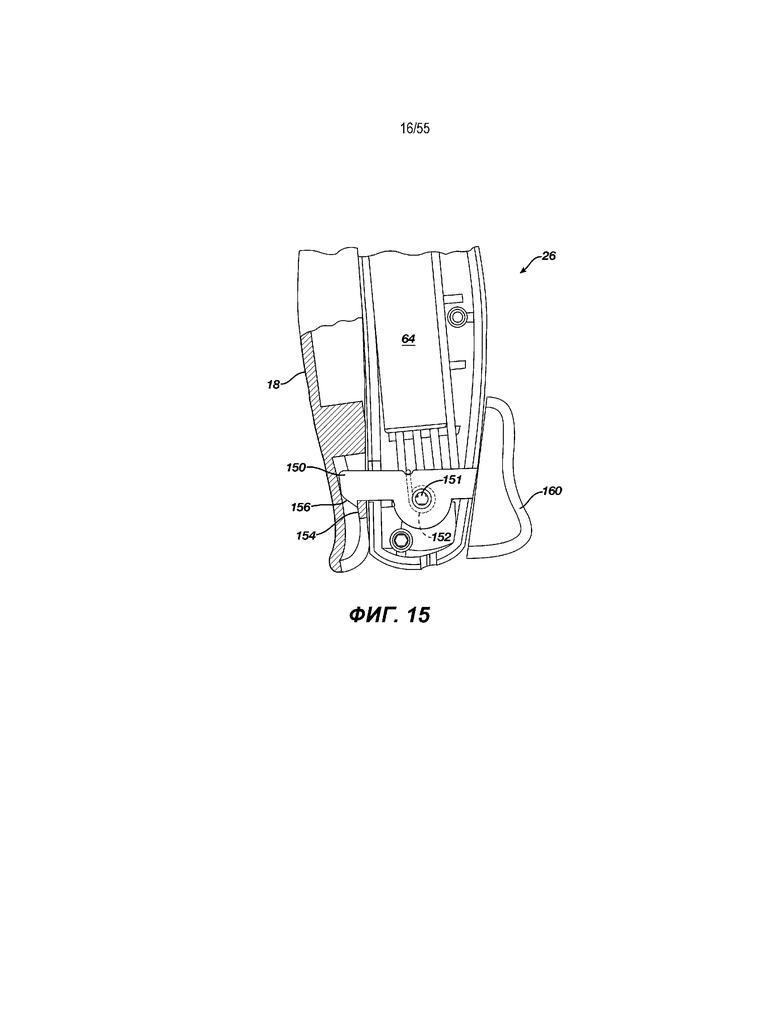
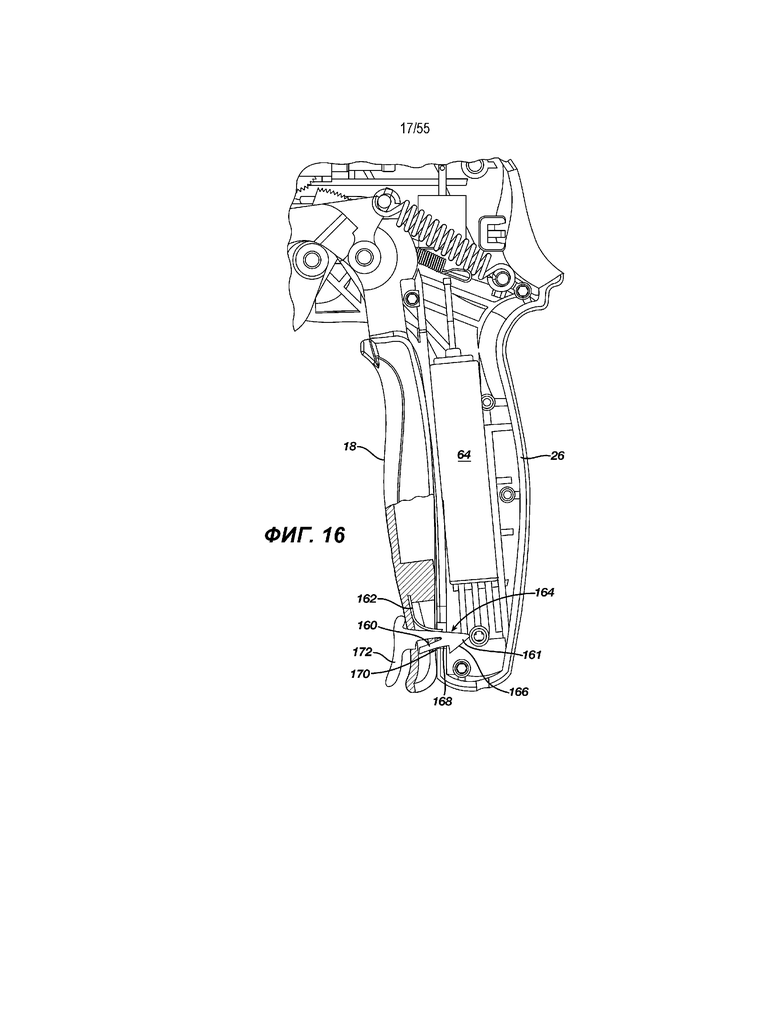
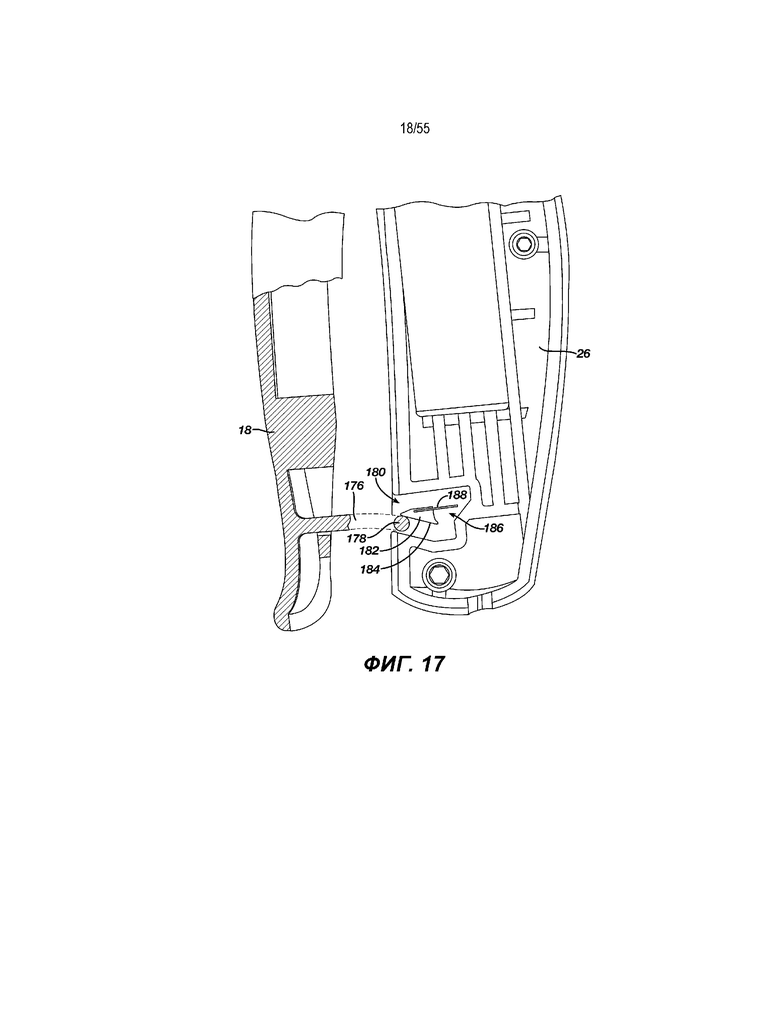
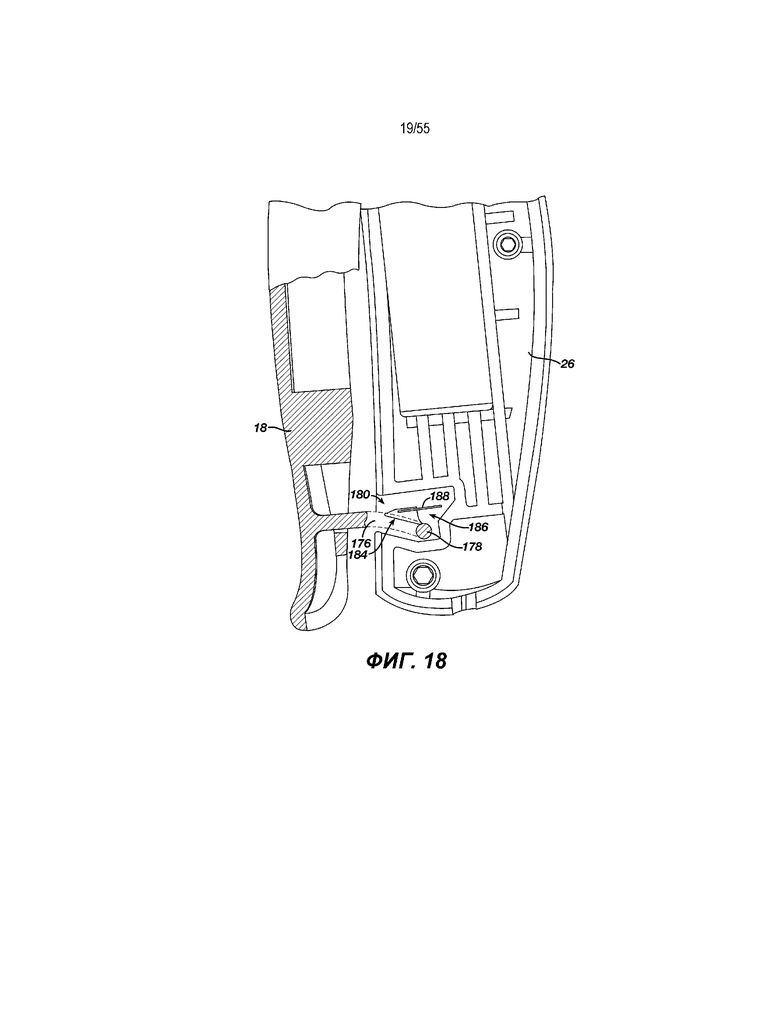
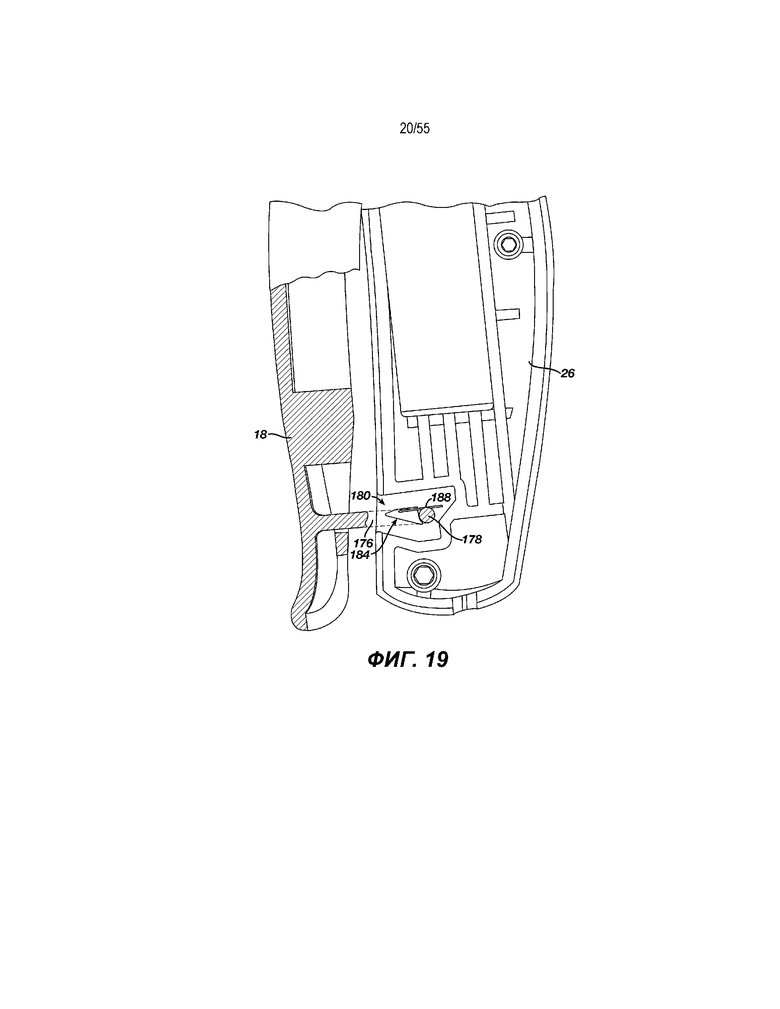
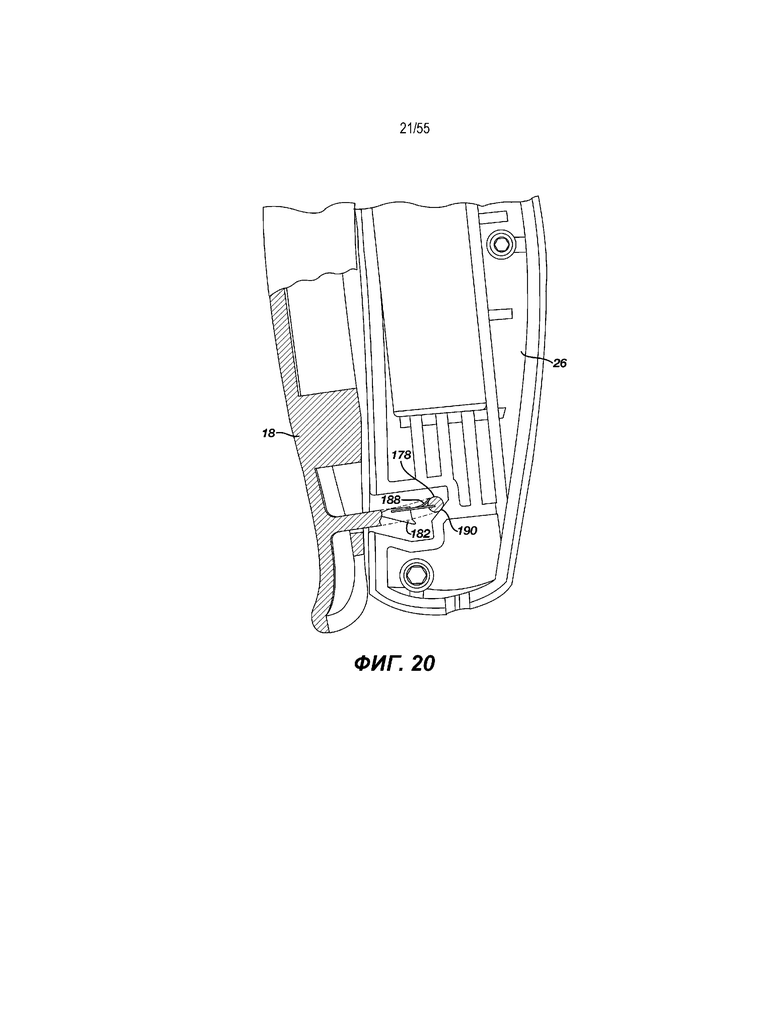
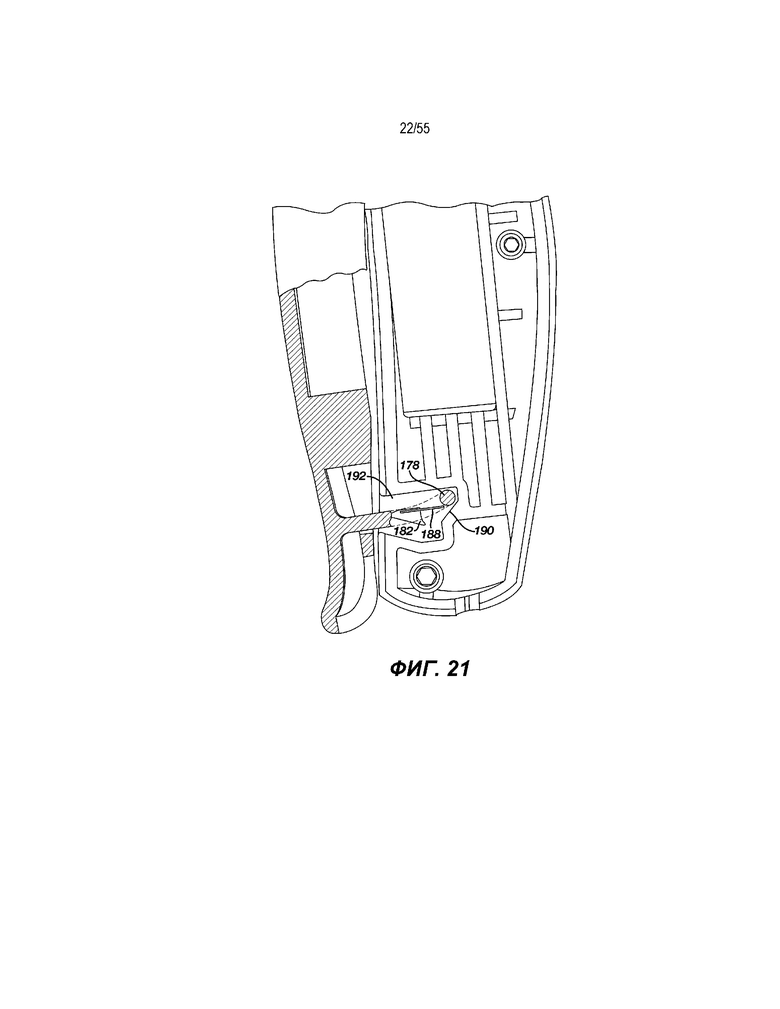
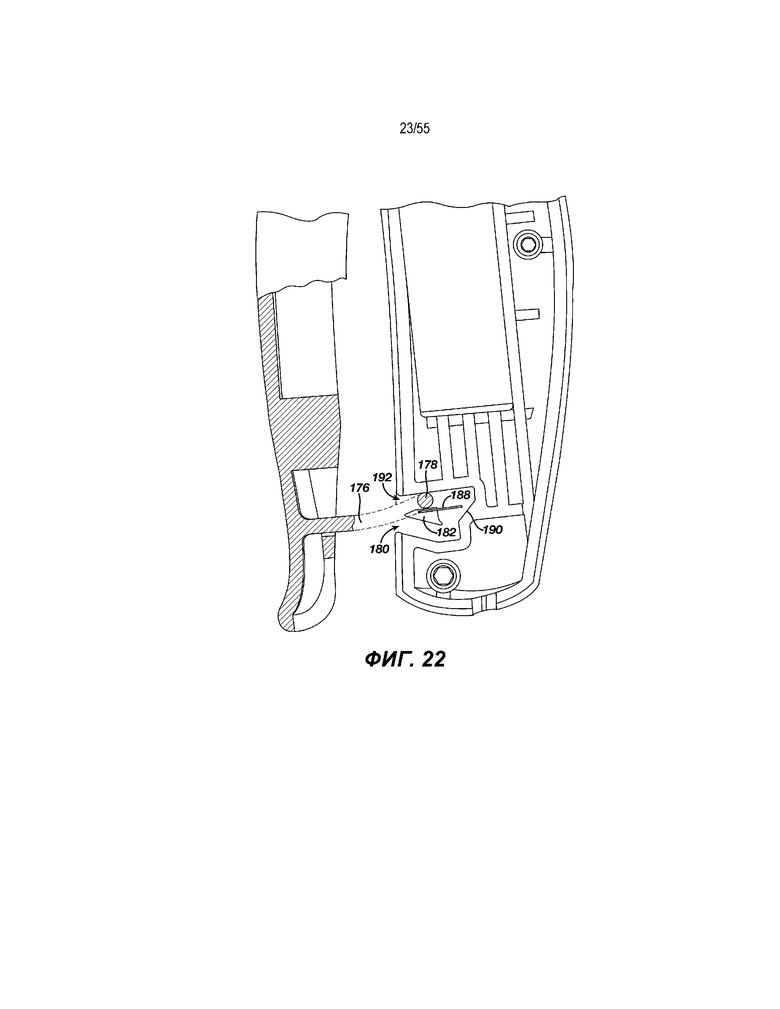
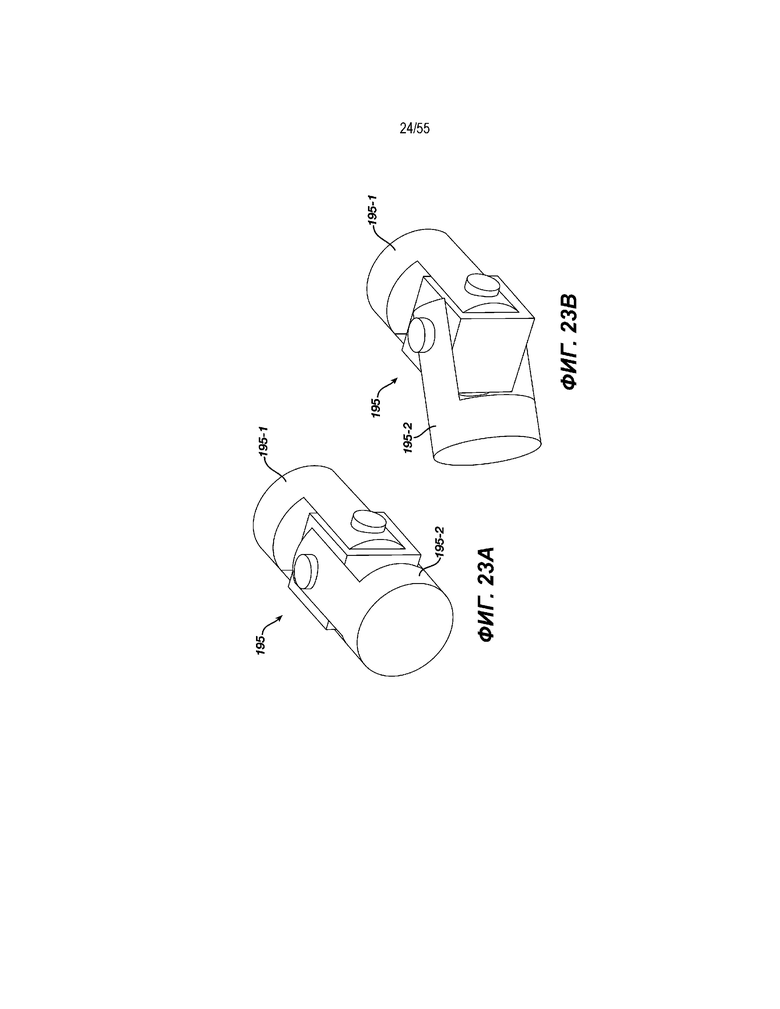
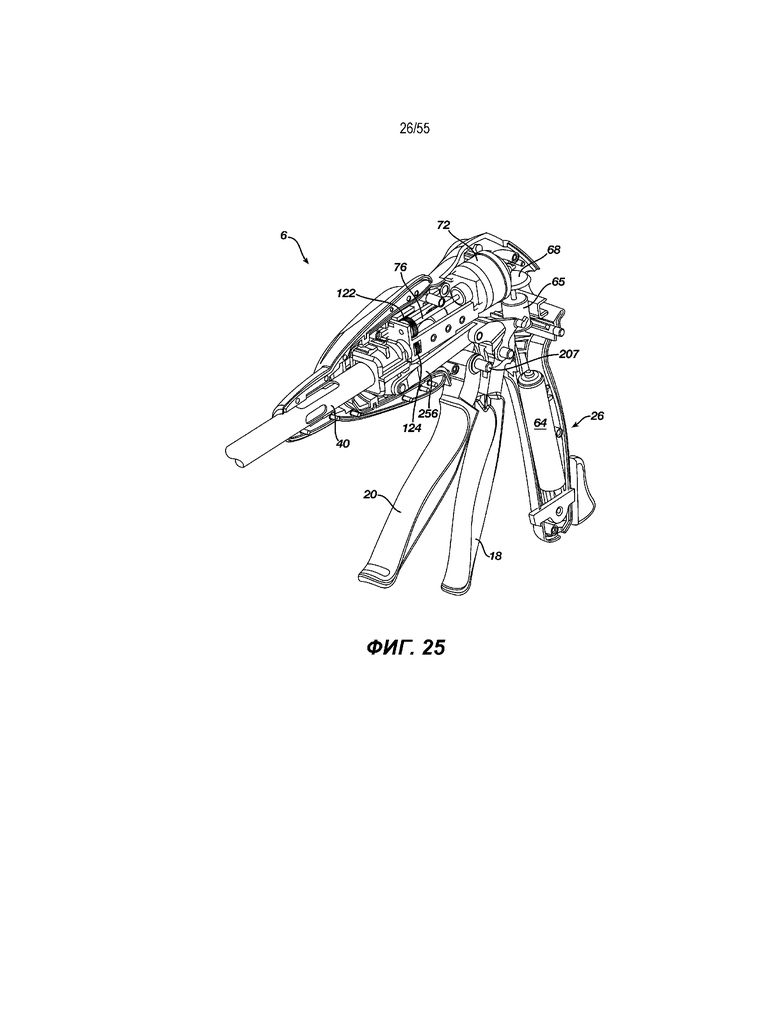


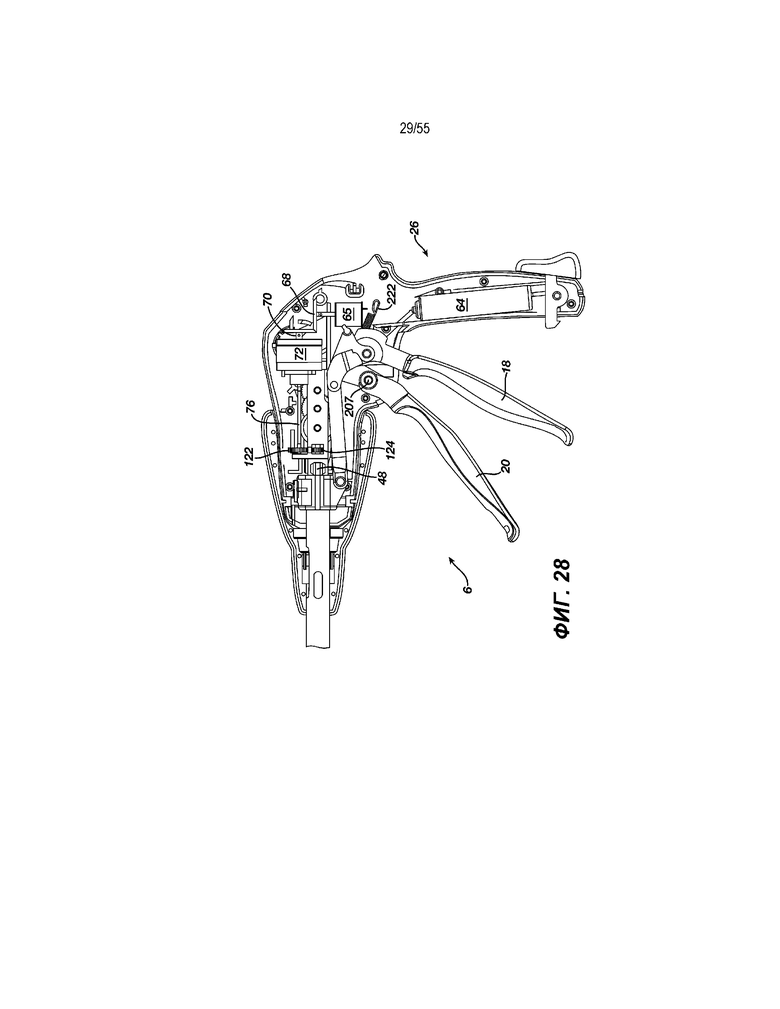
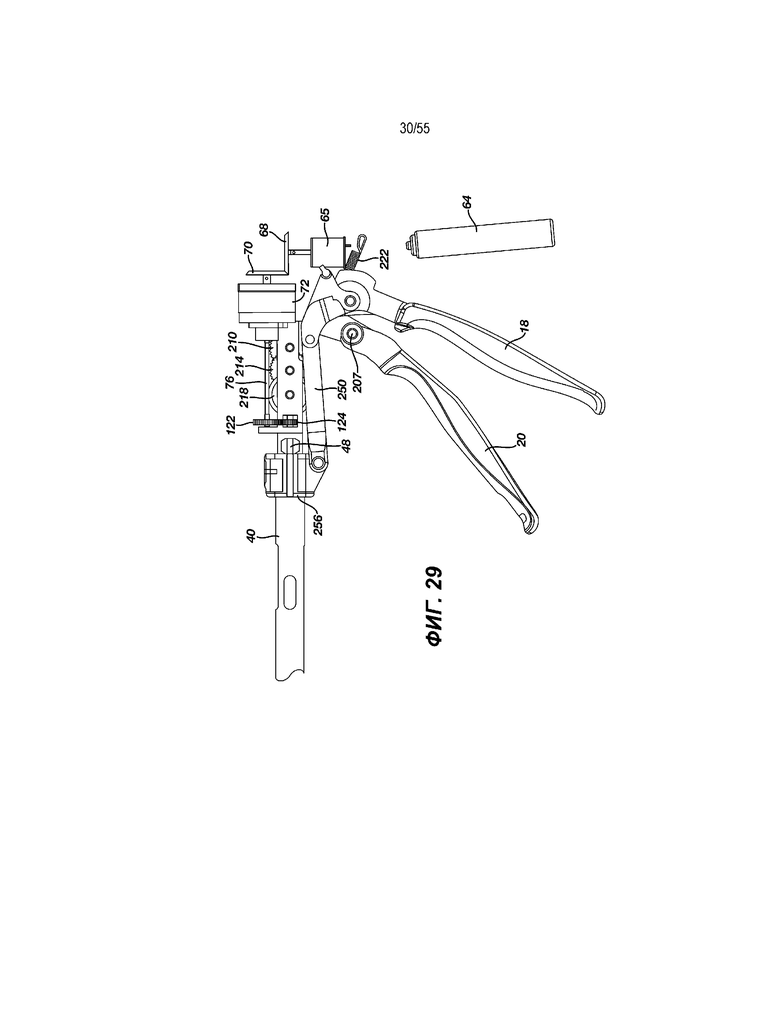
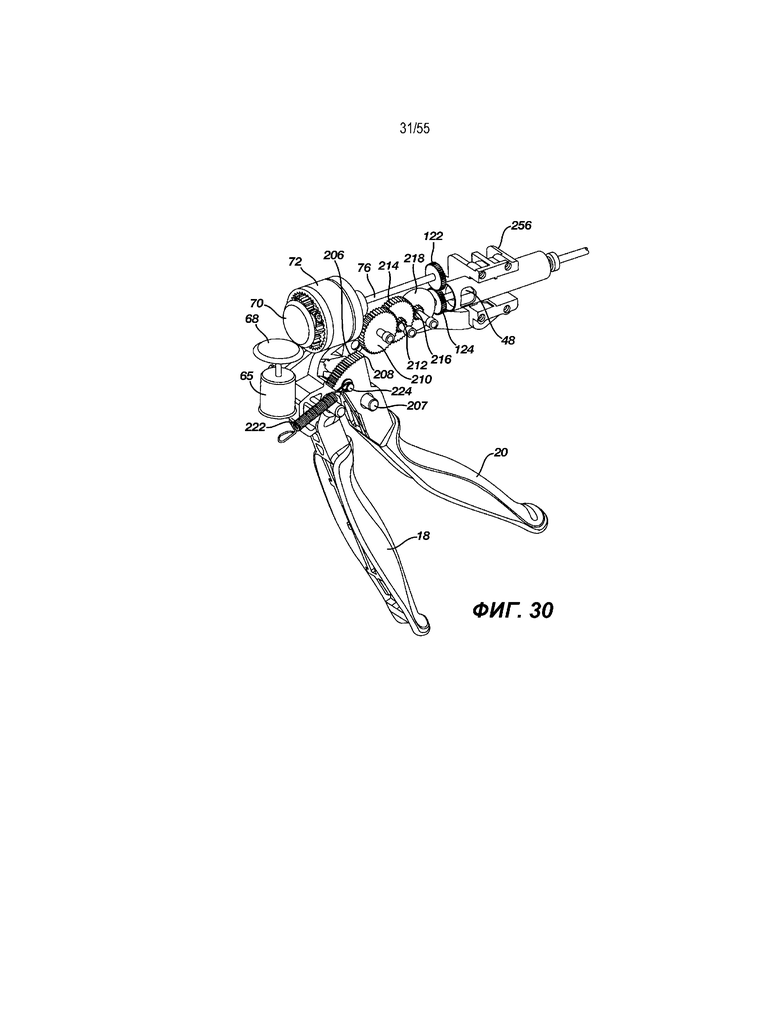
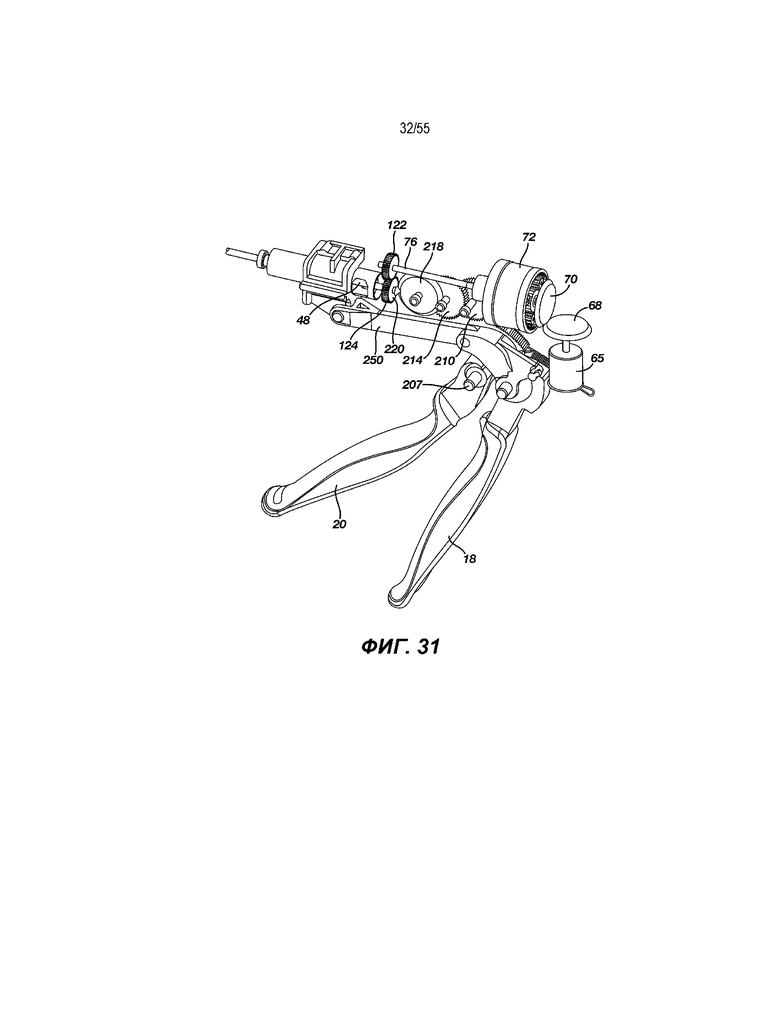

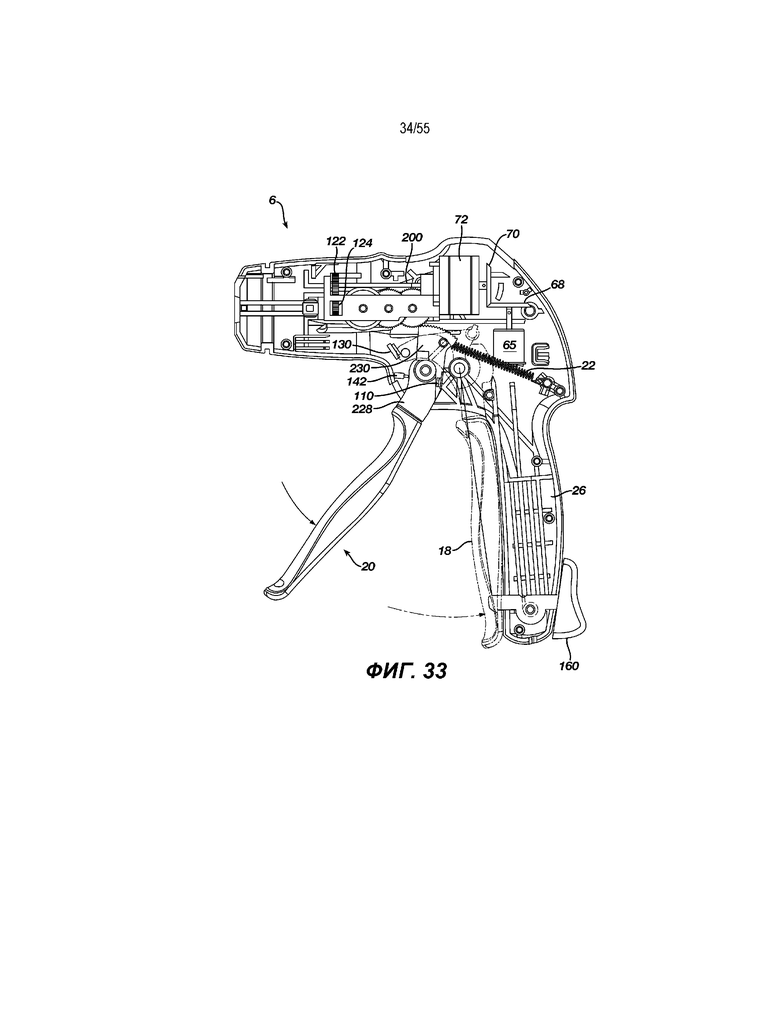
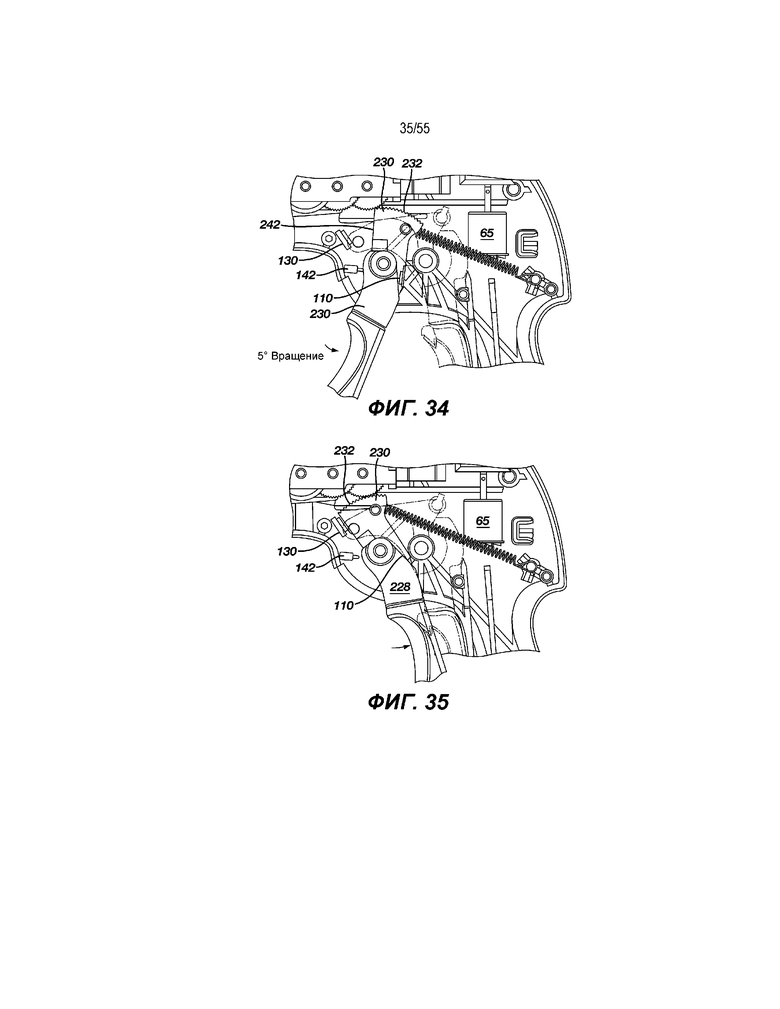
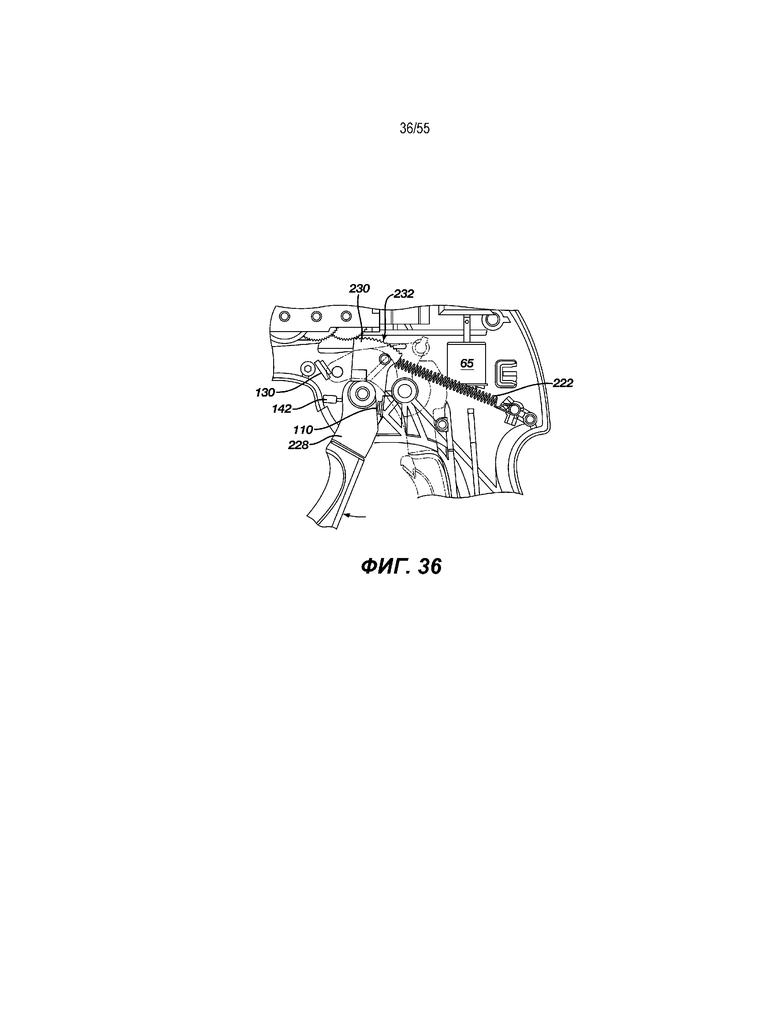
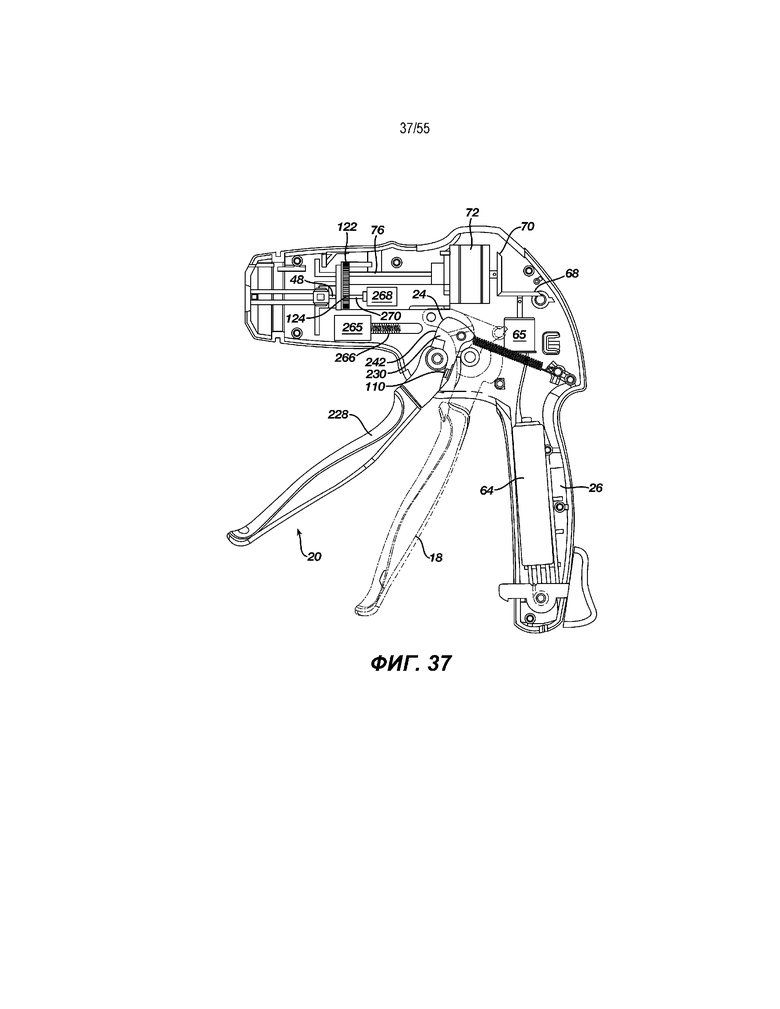
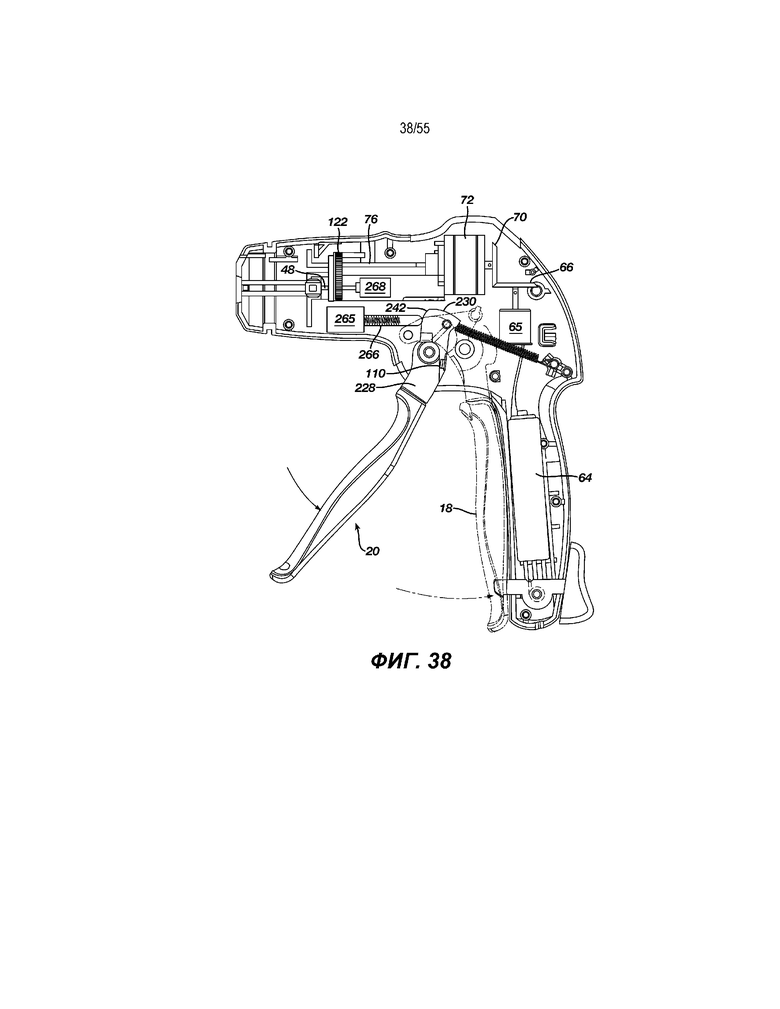
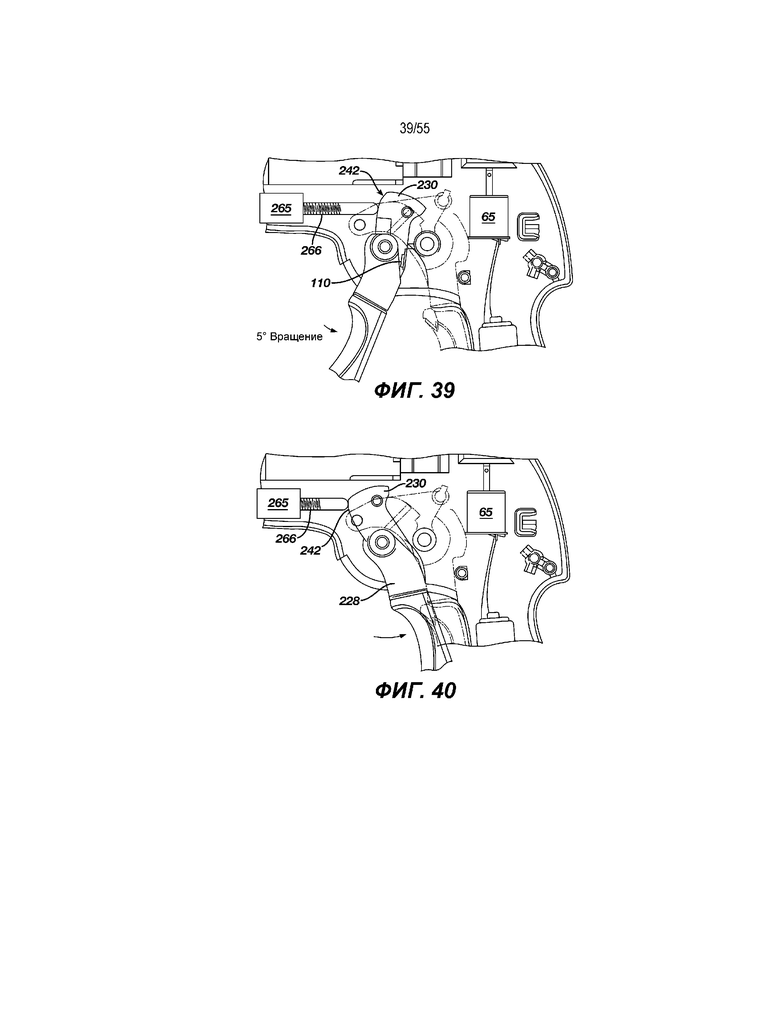
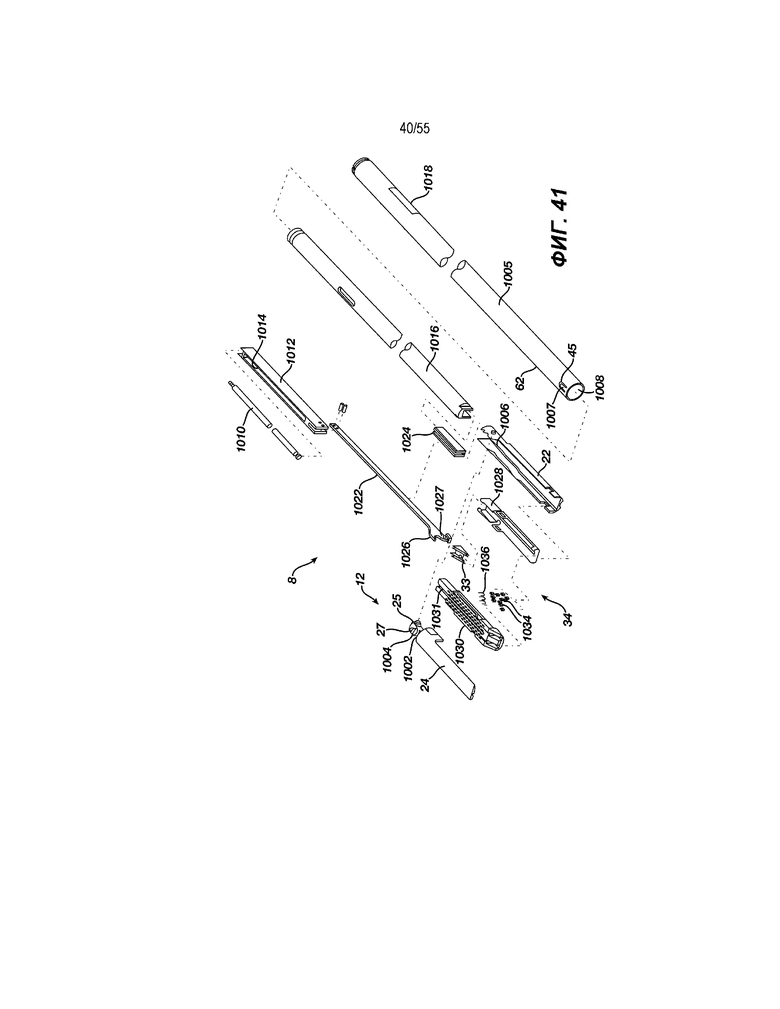
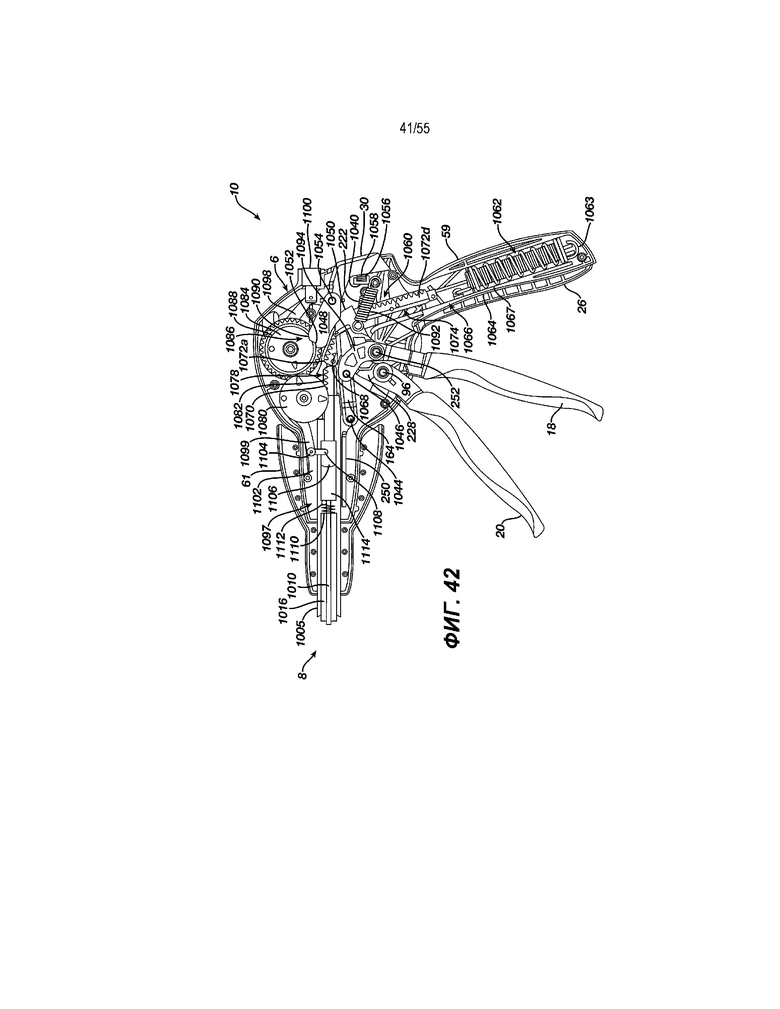
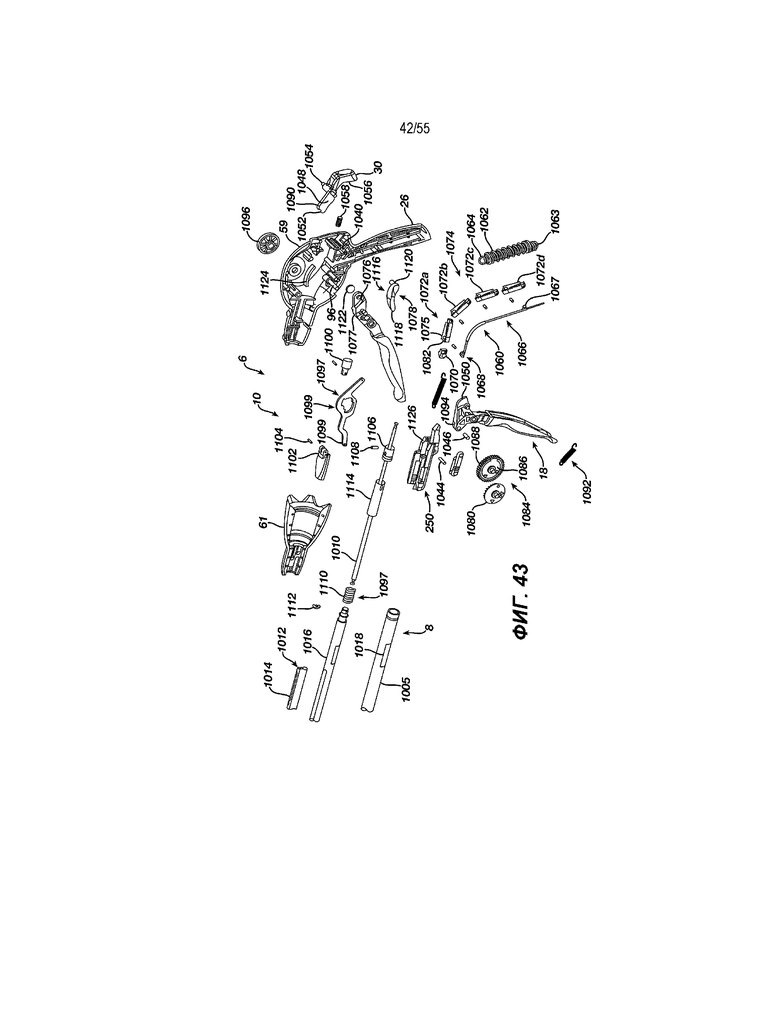
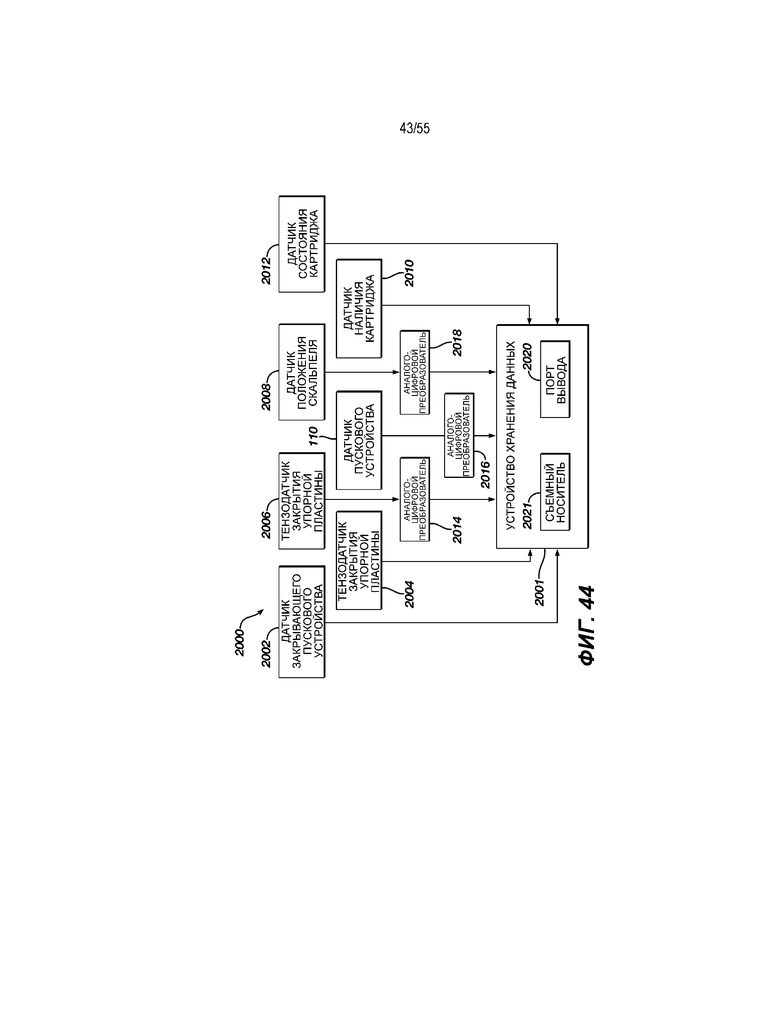
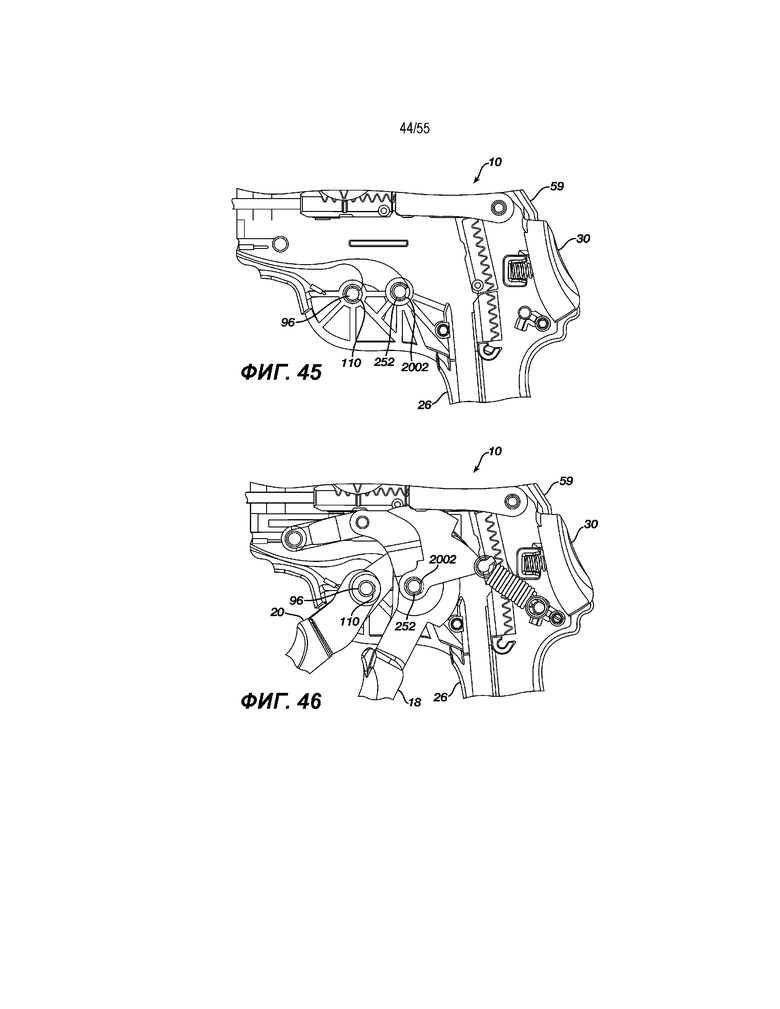
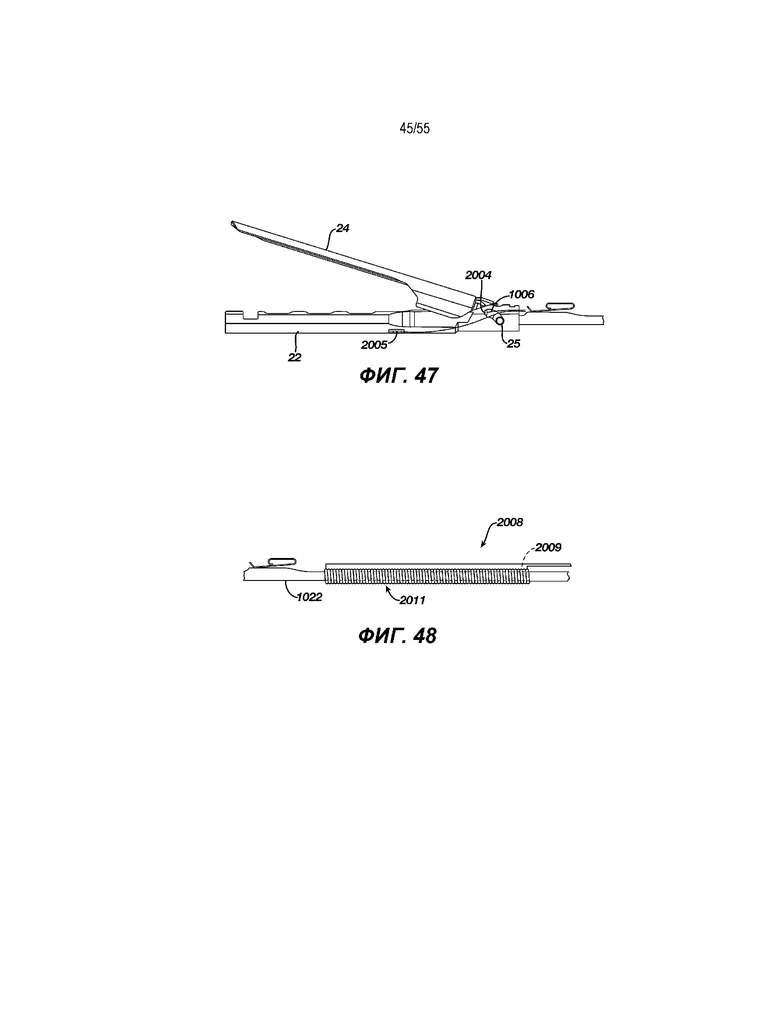
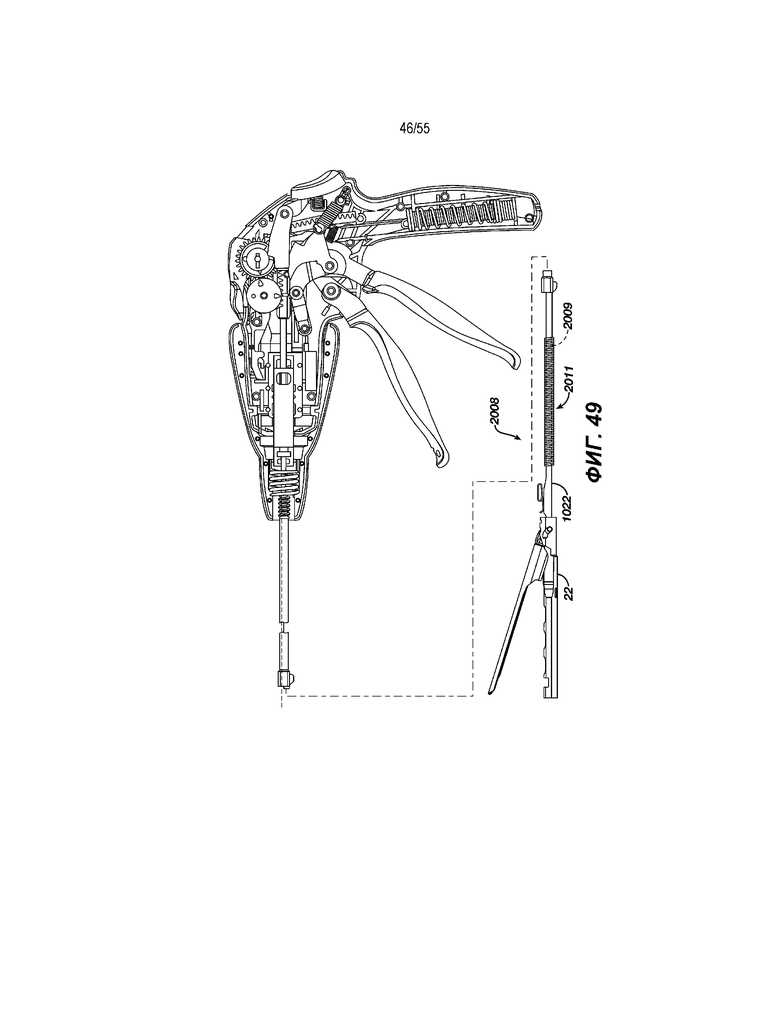

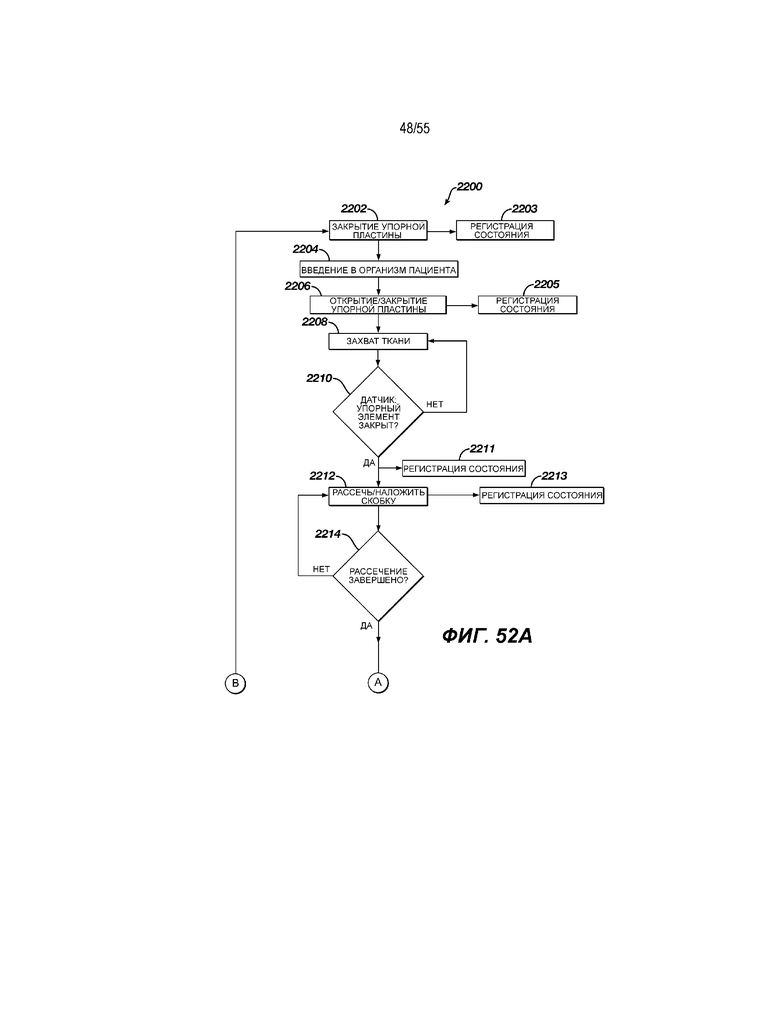
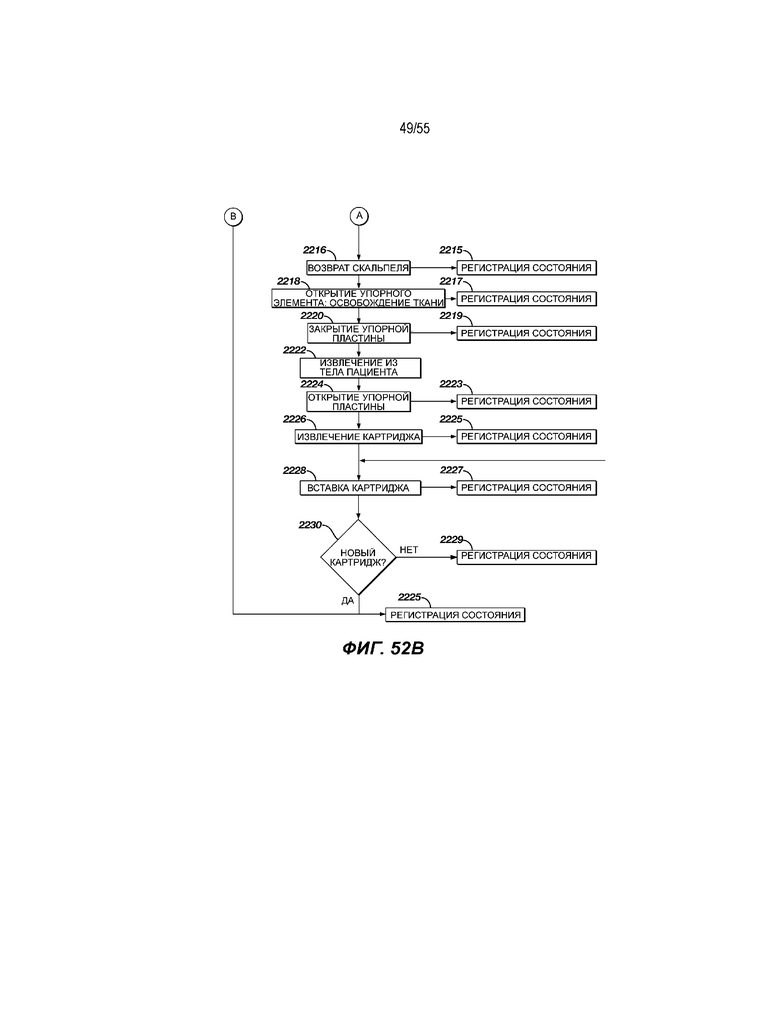

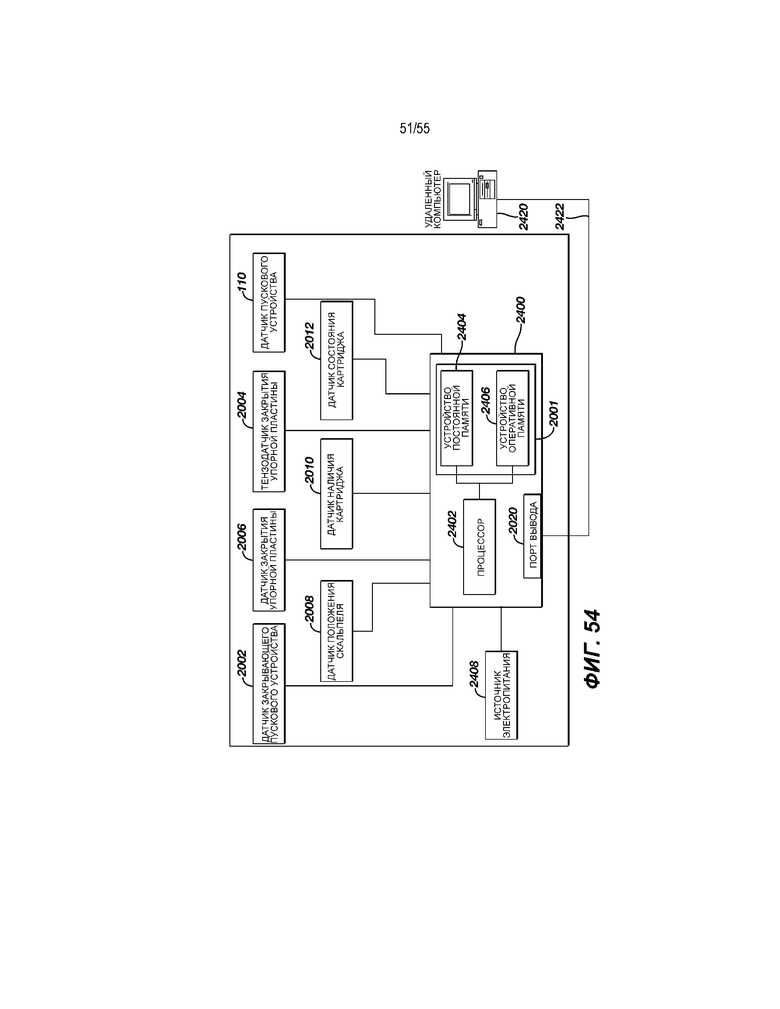
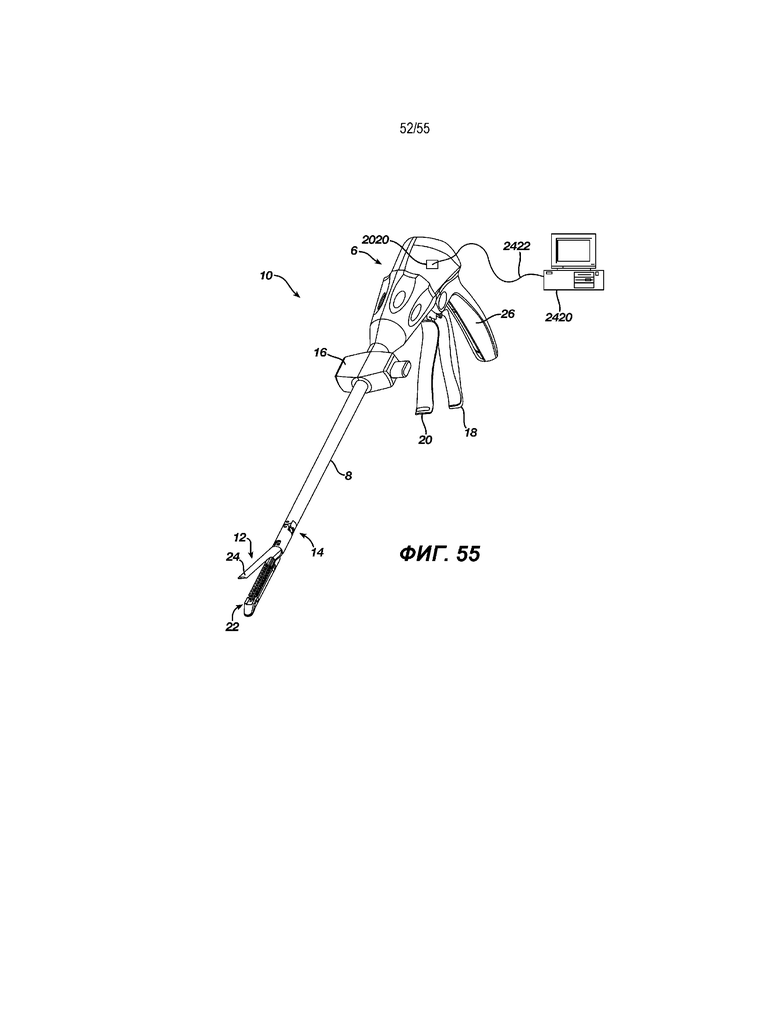
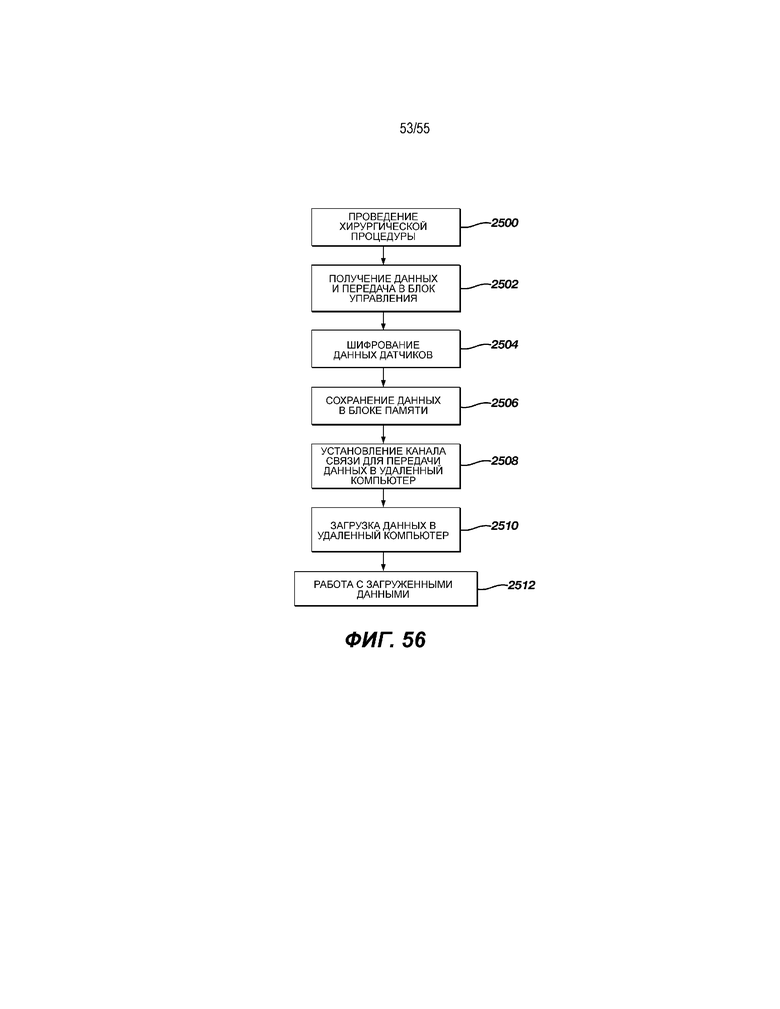
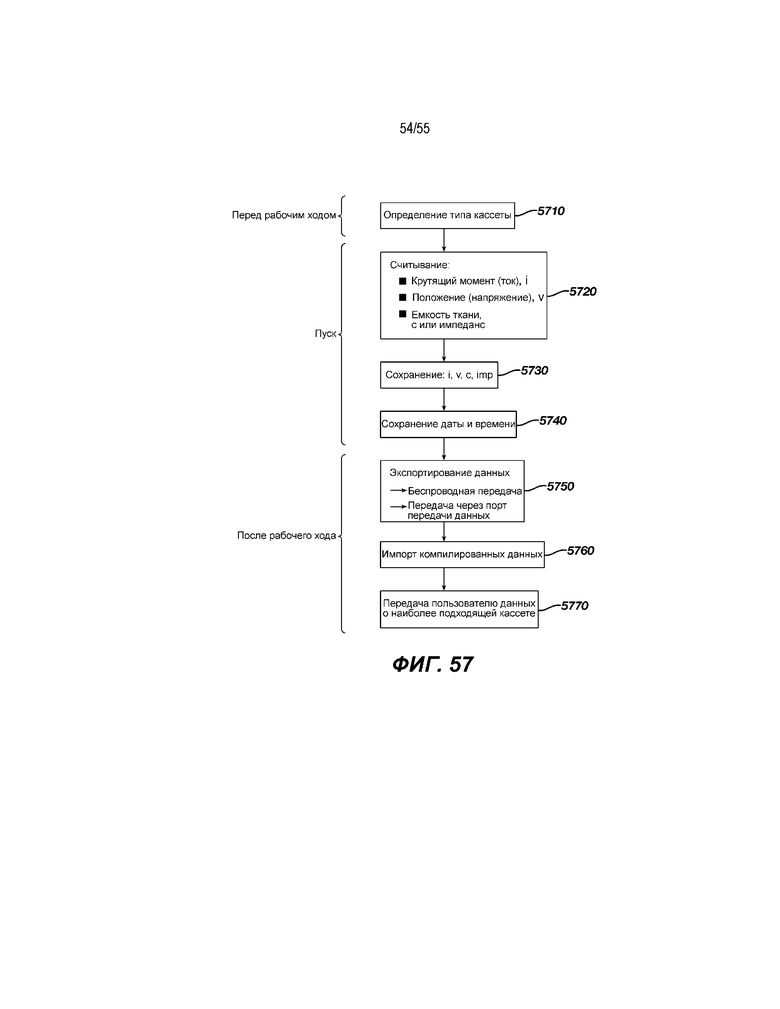
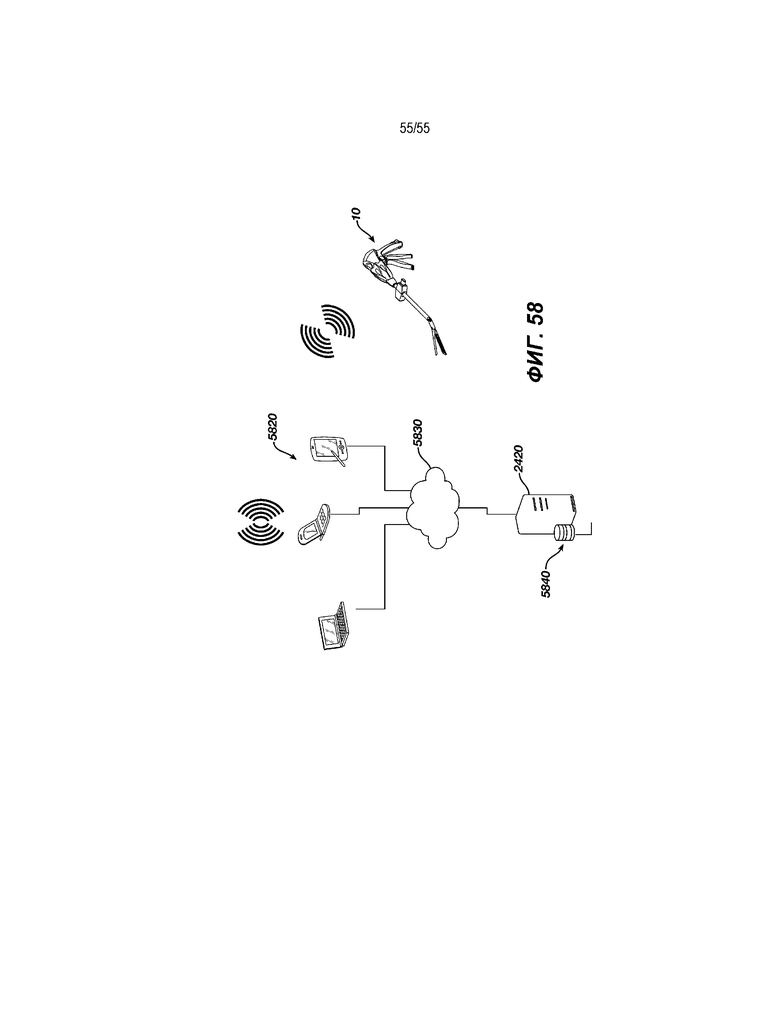
Изобретение относится к медицине. Способ предоставления хирургу обратной связи при сшивании тканей, согласно которому предоставляют сшивающий электроинструмент. Сшивающий электроинструмент содержит рукоятку с источником электропитания и электродвигателем, стержень, связанный с рукояткой, концевой манипулятор, связанный со стержнем и оснащенный кассетой со скобками, датчик кассеты для определения типа кассеты в концевом манипуляторе, микропроцессор, связанный с электродвигателем, устройство для хранения данных, связанное с микропроцессором, и устройство передачи данных, связанное с устройством хранения данных и микропроцессором. Микропроцессор выполнен так, чтобы обеспечить работу инструмента, в соответствии с которой измеряется параметр электродвигателя при выталкивании скобы сшивающим электроинструментом, сохраняется параметр электродвигателя и передается параметр электродвигателя в удаленное устройство. Микропроцессор дополнительно выполнен с возможностью передавать информацию об идентификационных данных кассеты и датчика кассеты к удаленному устройству. Удаленное устройство выполнено с возможностью сравнивать параметр электродвигателя с заданным значением, оповещать пользователя о том, что при установке скобы параметры электродвигателя находятся за пределами заданного значения и предоставлять рекомендации о выборе кассеты на основании сравнения параметра электродвигателя и заданного значения. Заданное значение представляет собой известное или предполагаемое значение на основе комбинации инструмента и кассеты. Изобретение обеспечивает предотвращение неправильного формирования скобок при сшивании тканей, в результате чего предотвращается возможное кровотечение или расхождение сшитой ткани. 1 з.п. ф-лы, 63 ил.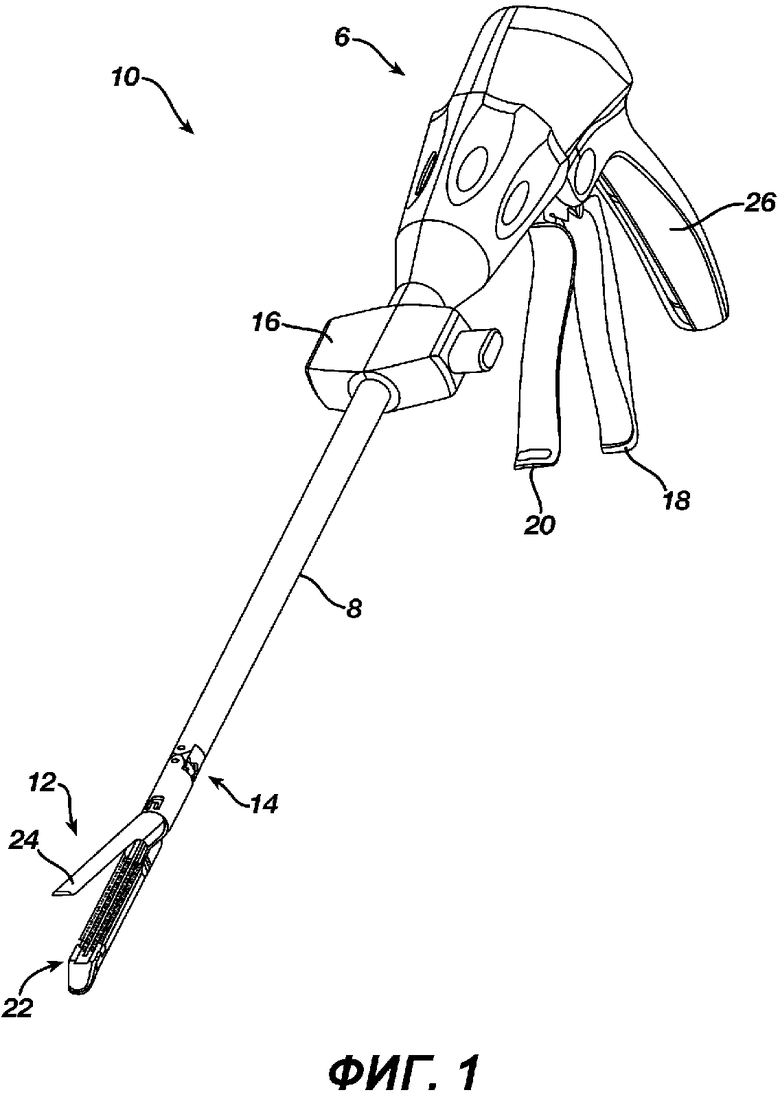
1. Способ предоставления хирургу обратной связи при сшивании тканей, согласно которому:
предоставляют сшивающий электроинструмент, содержащий:
рукоятку с источником электропитания и электродвигателем;
стержень, связанный с рукояткой;
концевой манипулятор, связанный со стержнем и оснащенный кассетой со скобками;
датчик кассеты для определения типа кассеты в концевом манипуляторе;
микропроцессор, связанный с электродвигателем;
устройство для хранения данных, связанное с микропроцессором;
устройство передачи данных, связанное с устройством хранения данных и микропроцессором;
причем микропроцессор выполнен так, чтобы обеспечить работу инструмента следующим образом:
измерять параметр электродвигателя при выталкивании скобы сшивающим электроинструментом;
сохранять параметр электродвигателя;
передавать параметр электродвигателя в удаленное устройство;
причем микропроцессор дополнительно выполнен с возможностью передавать информацию об идентификационных данных кассеты и датчика кассеты к удаленному устройству; и
удаленное устройство выполнено с возможностью:
сравнивать параметр электродвигателя с заданным значением, причем заданное значение представляет собой известное или предполагаемое значение, на основе комбинации инструмента и кассеты;
оповещать пользователя о том, что при установке скобы параметры электродвигателя находятся за пределами заданного значения; и
предоставлять рекомендации о выборе кассеты на основании сравнения параметра электродвигателя и заданного значения.
2. Способ по п.1, в котором устройство передачи данных представляет собой устройство радиочастотной передачи данных, связанное с устройством хранения данных и микропроцессором, причем параметр электродвигателя передается в удаленное устройство через указанное устройство радиочастотной передачи данных.
| ШТРЕКОВЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ | 1992 |
|
RU2044890C1 |
| US 20120211542 A1, 23.08.2012 | |||
| ХИРУРГИЧЕСКИЙ СШИВАТЕЛЬ ДЛЯ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 2009 |
|
RU2437622C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 1993 |
|
RU2110221C1 |
| US 20110174862 A1, 21.07.2011. | |||

