Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к устройству управления транспортным средством, которое управляет транспортным средством, так что транспортное средство движется по полосе движения.
2. Описание предшествующего уровня техники
[0002] В устройстве управления транспортным средством, которое управляет транспортным средством, так что транспортное средство движется по полосе движения, транспортное средство движется без необходимости в операции водительского управления, и, следовательно, водитель иногда находится в состоянии высвобождения рук, в котором руки водителя сняты с рулевого колеса. Что касается такого состояния высвобождения рук, публикация японской патентной заявки № 7-25301 описывает устройство, которое возбуждает тревожный сигнал в случае, когда водитель продолжает состояние высвобождения рук в течение заданного времени или более.
[0003] Однако в вышеописанном родственном устройстве ситуация транспортного средства не учитывается. Следовательно, даже когда транспортное средство движется по крутому повороту на узкой дороге, или даже когда транспортное средство едет прямо по широкой дороге, независимо от ситуации, тревожная сигнализация выполняется одинаковым образом в зависимости от времени, в течение которого водитель продолжает состояние высвобождения рук. Следовательно, существует вероятность, что тревожная сигнализация выполняется в неподходящий момент времени, который не подходит ситуации транспортного средства.
Сущность изобретения
[0004] Изобретение предоставляет устройство управления транспортным средством, которое выполняет тревожную сигнализацию, подходящую к ситуации транспортного средства.
[0005] Первый аспект изобретения является устройством управления транспортным средством, выполненным с возможностью управлять транспортным средством, так что транспортное средство движется по полосе движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, диапазон управления рулением и диапазон управления скоростью транспортного средства задаются заранее, устройство управления транспортным средством включает в себя: блок распознавания состояния движения, выполненный с возможностью распознавать состояние движения транспортного средства; блок распознавания поперечной позиции, выполненный с возможностью распознавать поперечную позицию транспортного средства относительно полосы движения и ориентацию транспортного средства относительно полосы движения; блок вычисления запаса времени до ухода с полосы, выполненный с возможностью вычислять запас времени до ухода с полосы на основе состояния движения транспортного средства, поперечной позиции транспортного средства относительно полосы движения и ориентации транспортного средства относительно полосы движения, запас времени до ухода с полосы является временем до того момента, когда транспортное средство отклоняется от полосы движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства; блок измерения продолжительности времени высвобождения рук, выполненный с возможностью измерять продолжительность времени высвобождения рук, продолжительность времени высвобождения рук является продолжительностью времени состояния высвобождения рук водителя транспортного средства; блок оценки времени возврата водительского управления, выполненный с возможностью оценивать время возврата водительского управления на основе продолжительности времени высвобождения рук, время возврата водительского управления является временем до того момента, когда водитель в состоянии высвобожденных рук возвращается к операции водительского управления; и блок управления, выполненный с возможностью выполнять тревожную сигнализацию для водителя в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше.
[0006] Согласно устройству управления транспортным средством, принимая во внимание случай, когда ненормальность, такая как ложное распознавание, возникает в устройстве, тревожный сигнал выводится водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления для водителя из запаса времени до ухода с полосы, которое является временем до того момента, когда транспортное средство отклоняется от полосы движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которое может управляться посредством устройства, равно первому пороговому значению или меньше. Следовательно, согласно устройству управления транспортного средства представляется возможным выводить тревожный сигнал в момент времени, который запланирован в соответствии с уходом транспортного средства с полосы движения, по сравнению с устройством связного уровня техники, которое выводит тревожный сигнал в заданное время в случае, когда водитель находится в состоянии высвобождения рук.
[0007] В вышеописанном устройстве управления транспортным средством согласно первому аспекту изобретения блок управления может быть выполнен с возможностью выполнять управление продлением запаса времени до ухода с полосы посредством, по меньшей мере, одного из замедления транспортного средства и ограничения диапазона управления рулением, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше. Поскольку устройство управления транспортным средством выполняет управление продлением запаса времени до ухода с полосы в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше, представляется возможным обеспечивать время для водителя, чтобы возвращаться к операции водительского управления, прежде чем транспортное средство отклонится от полосы движения, даже когда ненормальность, такая как ложное распознавание, возникает в устройстве, в то время как водитель продолжает состояние высвобождения рук, например.
[0008] Вышеописанное устройство управления транспортным средством согласно первому аспекту изобретения может дополнительно включать в себя блок распознавания состояния водителя, выполненный с возможностью распознавать, находится ли водитель в состоянии низкой активности, и блок оценки времени возврата водительского управления может быть выполнен с возможностью оценивать, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока распознавания состояния водителя, что время возврата водительского управления должно быть дольше, чем в случае, когда водитель распознается как находящийся не в состоянии низкой активности. Поскольку время, чтобы возвращать операцию водительского управления в ответ на тревожный сигнал, является длительным в случае, когда водитель находится в состоянии низкой активности (например, состоянии сна), устройство управления транспортного средства оценивает, что время возврата водительского управления должно быть более длительным временем, в случае, когда водитель распознается как находящийся в состоянии низкой активности. Таким образом, представляется возможным оценивать время возврата водительского управления, соответствующее состоянию водителя.
[0009] Вышеописанное устройство управления транспортным средством согласно первому аспекту изобретения может дополнительно включать в себя: блок получения информации о препятствии, выполненный с возможностью получать информацию о препятствии, относящуюся к препятствиям около транспортного средства; и блок вычисления запаса времени до соприкосновения, выполненный с возможностью вычислять запас времени до соприкосновения на основе состояния движения транспортного средства и информации о препятствии, запас времени до соприкосновения является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, и блок управления может быть выполнен с возможностью выводить тревожный сигнал водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше. Согласно устройству управления транспортным средством, принимая во внимание случай, когда ненормальность, такая как ложное распознавание, возникает в устройстве, тревожный сигнал выводится водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления для водителя из запаса времени до соприкосновения, которое является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которое может управляться посредством устройства, равно третьему пороговому значению или меньше. Следовательно, согласно устройству управления транспортным средством, представляется возможным выводить тревожный сигнал в момент времени, который планируется в соответствии с соприкосновением между транспортным средством и препятствием, и предотвращать предоставление тревожным сигналом водителю чувства непривычности по сравнению с устройством связного уровня техники, которое выводит тревожный сигнал в заданное время в случае, когда водитель находится в состоянии высвобождения рук.
[0010] Второй аспект изобретения является устройством управления транспортным средством, выполненным с возможностью управлять транспортным средством, так что транспортное средство движется по полосе движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, диапазон управления рулением и диапазон управления скоростью транспортного средства задаются заранее, устройство управления транспортным средством включает в себя: блок распознавания состояния движения, выполненный с возможностью распознавать состояние движения транспортного средства; блок получения информации о препятствии, выполненный с возможностью получать информацию о препятствии, относящуюся к препятствиям около транспортного средства; блок вычисления запаса времени до соприкосновения, выполненный с возможностью вычислять запас времени до соприкосновения на основе состояния движения транспортного средства и информации о препятствии, запас времени до соприкосновения является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства; блок измерения продолжительности времени высвобождения рук, выполненный с возможностью измерять продолжительность времени высвобождения рук, продолжительность времени высвобождения рук является продолжительностью времени состояния высвобождения рук водителя транспортного средства; блок оценки времени возврата водительского управления, выполненный с возможностью оценивать время возврата водительского управления для водителя на основе продолжительности времени высвобождения рук; и блок управления, выполненный с возможностью выводить тревожный сигнал водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше.
[0011] Согласно устройству управления транспортным средством, принимая во внимание случай, когда ненормальность, такая как ложное распознавание, возникает в устройстве, тревожный сигнал выводится водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления для водителя из запаса времени до соприкосновения, которое является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которое может управляться посредством устройства, равно третьему пороговому значению или меньше. Следовательно, согласно устройству управления транспортного средства, представляется возможным выводить тревожный сигнал в момент времени, который планируется в соответствии с соприкосновением между транспортным средством и препятствием, по сравнению с устройством связного уровня техники, которое выводит тревожный сигнал в заданное время в случае, когда водитель находится в состоянии высвобождения рук.
Краткое описание чертежей
[0012] Признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения описываются ниже со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 – это блок-схема, показывающая устройство управления транспортным средством согласно первому варианту осуществления;
Фиг. 2 – это вид сверху для описания запаса времени до ухода с полосы;
Фиг. 3 – это график, определяющий соотношение между продолжительностью времени высвобождения рук и временем возврата водительского управления;
Фиг. 4 – это блок-схема последовательности операций, показывающая способ управления посредством устройства управления транспортным средством согласно первому варианту осуществления;
Фиг. 5 – это блок-схема, показывающая устройство управления транспортным средством согласно второму варианту осуществления;
Фиг. 6 – это вид сверху для описания запаса времени до соприкосновения;
Фиг. 7 – это вид сверху для описания другого примера запаса времени до соприкосновения; и
Фиг. 8 – это блок-схема последовательности операций, показывающая способ управления посредством устройства управления транспортным средством согласно второму варианту осуществления.
Подробное описание вариантов осуществления
[0013] Далее в данном документе варианты осуществления изобретения будут описаны со ссылкой на чертежи.
[0014] Фиг. 1 – это блок-схема, показывающая устройство управления транспортным средством согласно первому варианту осуществления. Устройство 100 управления транспортным средством, показанное на фиг. 1, которое устанавливается в транспортное средство M, такое как пассажирский автомобиль, управляет движением транспортного средства M. Устройство 100 управления транспортным средством, например, выполняет помощь в соблюдении полосы движения [LTC: управление траекторией по полосе] для инструктирования транспортному средству M двигаться по полосе движения, по которой транспортное средство M движется. Помощь в соблюдении полосы движения, например, является помощью в вождении для управления транспортным средством так, что поперечная позиция транспортного средства является целевой поперечной позицией на полосе движения, и, вместе с тем, когда водитель выполняет руление, отражает руление на движении транспортного средства. Поперечная позиция транспортного средства является позицией транспортного средства в поперечном направлении полосы движения. Целевая поперечная позиция, например, устанавливается в центральную позицию полосы движения в поперечном направлении полосы движения. Дополнительно, целевая поперечная позиция может быть установлена в позицию, которая смещена от центральной позиции полосы движения в поперечном направлении полосы.
[0015] Здесь, устройство 100 управления транспортным средством может выполнять автоматическое вождение для инструктирования транспортному средству M автоматически двигаться по направлению к пункту назначения, который предварительно задается на карте. Т.е., содержимое варианта осуществления может быть применено также к транспортному средству M во время автоматического вождения.
[0016] Устройство 100 управления транспортным средством, например, управляет транспортным средством M, так что транспортное средство M движется по полосе движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которые предварительно задаются, когда водитель включает LTC или автоматическое вождение. Диапазон управления рулением является диапазоном, в котором устройству 100 управления транспортным средством предоставляется возможность управлять рулением транспортным средством M при управлении транспортным средством для LTC или автоматического вождения. Диапазон управления рулением, например, включает в себя, по меньшей мере, один из диапазона управления углом поворота рулевого колеса, диапазона управления скоростью изменения угла поворота рулевого колеса, диапазона управления крутящим моментом руления и диапазона управления скоростью изменения крутящего момента руления. Аналогично, диапазон управления скоростью транспортного средства является диапазоном, в котором устройству 100 управления транспортным средством предоставляется возможность управлять скоростью транспортного средства или ускорением транспортного средства M при управлении транспортным средством для LTC или автоматического вождения. Диапазон управления скоростью транспортного средства, например, включает в себя диапазон управления для скорости транспортного средства и диапазон управления для ускорения (замедления). Диапазон управления рулением и диапазон управления скоростью транспортного средства могут быть фиксированными диапазонами, или диапазоны могут быть изменены в зависимости от изменения настройки водителем или ситуации движения транспортного средства M.
[0017] Устройство 100 управления транспортным средством вычисляет запас времени до ухода с полосы, в то же время управляя транспортным средством M, так что транспортное средство M движется по полосе движения. Запас времени до ухода с полосы является временем (например, минимальным временем) до того момента, когда транспортное средство M отклоняется от полосы движения в вышеописанном диапазоне управления рулением и диапазоне управления скоростью транспортного средства. Например, если ненормальность, такая как ложное распознавание окружающей ситуации, происходит в устройстве 100 управления транспортным средством, и устройство 100 управления транспортным средством управляет транспортным средством M так, что транспортное средство M едет по направлению к границе полосы для полосы движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, запас времени до ухода с полосы соответствует минимальному времени до того момента, когда транспортное средство M отклоняется от полосы движения. Запас времени до ухода с полосы может быть минимальным временем до того момента, когда транспортное средство M отклоняется от полосы движения посредством управления для рулевого управления от устройства 100 управления транспортным средством, в то время поддерживается как текущая скорость транспортного средства. Минимальное время при этом не является минимальным временем до того момента, когда транспортное средство M отклоняется от полосы движения фактически, а вычисленным минимальным временем до того момента, когда транспортное средство M отклоняется от полосы движения гипотетически. Минимальное время изменяется в зависимости от способа вычисления или настройки параметров, которые должны быть использованы для вычисления.
[0018] Устройство 100 управления транспортным средством вычисляет запас времени до ухода с полосы, например, на основе состояния движения транспортного средства M (состояния скорости транспортного средства, ускорения, скорости поворота вокруг вертикальной оси и т.п.), поперечной позиции транспортного средства M относительно полосы движения и ориентации транспортного средства M относительно полосы движения (ориентации транспортного средства M относительно белой линии, формирующей полосу движения). Здесь, состояние ухода с полосы движения, например, может быть состоянием, в котором, по меньшей мере, передний край транспортного средства M выходит за белую линию (разделительную линию, автодорожную разделительную линию или т.п.), формирующую полосу движения. Состояние ухода с полосы движения может быть состоянием, в котором транспортное средство M находится на белой полосе.
[0019] Здесь, фиг. 2 – это вид сверху для описания запаса времени до ухода с полосы. Фиг. 2 показывает полосу R1 движения, по которой транспортное средство M движется, соседнюю полосу R2 движения, которая находится рядом с правой стороной полосы R1 движения, белые линии L1, L2, которые формируют полосу R1 движения, и белую линию L3, которая формирует соседнюю полосу R2 вместе с белой полосой L2. Дополнительно, фиг. 2 показывает полосу Rf1 движения, соседнюю полосу Rf2 и белые линии Lf1-Lf3 в случае, когда устройство 100 управления транспортным средством выполняет ложное распознавание гипотетически, и позицию Mf транспортного средства M в случае движения по полосе Rf1 движения.
[0020] Фиг. 2 показывает случай, когда, хотя фактическая полоса R1 движения и соседняя полоса R2 являются прямыми дорогами, устройство 100 управления транспортным средством ложно распознает полосу Rf1 движения и соседнюю полосу Rf2 как являющиеся левыми поворотами, чтобы управлять транспортным средством M. Полоса Rf1 движения и соседняя полоса Rf2 являются гипотетическими полосами, которые ложно распознаются посредством устройства 100 управления транспортным средством в случае ухода с фактической полосы R1 движения в кратчайшее время от текущей позиции транспортного средства M. Т.е., полоса Rf1 движения и соседняя полоса Rf2 изменяются не только в зависимости от фактической формы дороги, но также состояния движения транспортного средства M и диапазона управления рулением и диапазона управления скоростью транспортного средства устройства 100 управления транспортным средством. Здесь, устройство 100 управления транспортным средством не должно получать виртуальную полосу Rf1 движения и соседнюю полосу Rf2 движения посредством вычисления.
[0021] В ситуации, показанной на фиг. 2, устройство 100 управления транспортным средством вычисляет запас времени до ухода с полосы на основе состояния движения транспортного средства M, поперечной позиции транспортного средства M относительно полосы R1 движения и ориентации транспортного средства M относительно полосы R1 движения. Устройство 100 управления транспортным средством, например, вычисляет запас времени до ухода с полосы с предварительно заданным интервалом во время выполнения LTC.
[0022] Дополнительно, устройство 100 управления транспортным средством определяет, находится ли водитель в состоянии высвобождения рук. Состояние высвобождения рук, например, является состоянием, в котором водитель снял свои руки с рулевого колеса. Устройство 100 управления транспортным средством, например, определяет, находится ли водитель в состоянии высвобождения рук, на основе сигнала от датчика касания рулевого колеса, предусмотренного на рулевом колесе. Здесь, в случае, когда управление рычагом переключения передач или рычагом указания поворота водителем обнаруживается, устройство 100 управления транспортным средством может определять, что водитель не находится в состоянии высвобождения рук, даже когда водитель снял свои руки с рулевого колеса. Аналогично, в случае, когда управление педалью акселератора или управление педалью тормоза обнаруживается, устройство 100 управления транспортным средством может определять, что водитель не находится в состоянии высвобождения рук.
[0023] В случае определения, что водитель находится в состоянии высвобождения рук, устройство 100 управления транспортным средством начинает измерение продолжительности времени высвобождения рук. Продолжительность времени высвобождения рук является временем, в течение которого водитель продолжает состояние высвобождения рук. Устройство 100 управления транспортным средством оценивает время возврата водительского управления на основе продолжительности времени высвобождения рук. Время возврата водительского управления является временем до того момента, когда водитель в состоянии высвобождения рук возвращается к операции водительского управления. Возвратом к операции водительского управления, например, является то, что водитель в состоянии высвобождения рук узнает о ненормальности управления транспортным средством и удерживает рулевое колесо. Возвратом к операции водительского управления может быть то, что водитель в состоянии высвобождения рук узнает о ненормальности управления транспортным средством и выполняет операцию отмены управления транспортным средством, такого как LTC. Операция отмены управления транспортным средством может быть воздействием на кнопку отмены водителем или может быть блокировкой автоматического управления водителем. Блокировка автоматического управления – это операция отмены управления транспортным средством, например, посредством поворота рулевого колеса до ранее заданного порогового значения руления или более или посредством нажатия педали тормоза или педали акселератора до ранее заданного порогового значения нажатия или более.
[0024] Устройство 100 управления транспортным средством определяет, равна ли разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, первому пороговому значению или меньше. Разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, может быть отрицательным значением. Первое пороговое значение – это значение, которое задается для вывода тревожного сигнала водителю в состоянии высвобождения рук в подходящий момент времени. Первое пороговое значение может быть фиксированным значением или может быть переменным значением. Первое пороговое значение может быть нулевым или может быть отрицательным значением. В качестве первого порогового значения, например, большее значение может быть принято, когда скорость транспортного средства для транспортного средства M или ускорение транспортного средства M увеличивается. Например, в состоянии, когда форма дороги, по которой транспортное средство M движется, является изогнутой формой, большее значение может быть принято в качестве первого порогового значения по сравнению со случаем, когда форма дороги является прямой формой. Принимая большее значение в качестве первого порогового значения, представляется возможным переносить на более ранний срок момент тревожной сигнализации. Увеличение первого порогового значения эквивалентно сокращению запаса времени до ухода с полосы посредством взвешивания запаса времени до ухода с полосы.
[0025] В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, устройство 100 управления транспортным средством выводит тревожный сигнал водителю в состоянии высвобождения рук. Тревожный сигнал, например, является голосовым выводом или отображением изображения, которое предлагает водителю удерживать рулевое колесо.
[0026] В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше, устройство 100 управления транспортным средством может выполнять управление продлением запаса времени до ухода с полосы. Управление продлением запаса времени до ухода с полосы, например, является управлением для продления запаса времени до ухода с полосы посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Ограничение диапазона управления рулением, например, предназначено для того, чтобы сужать диапазон управления крутящим моментом руления посредством устройства 100 управления транспортным средством и диапазон скорости изменения крутящего момента руления посредством устройства 100 управления транспортным средством. Ограничение диапазона управления рулением может сужать диапазон управления углом поворота рулевого колеса и диапазон управления скоростью изменения угла поворота рулевого колеса. Здесь, как замедление транспортного средства M, так и ограничение диапазона управления рулением, могут выполняться в качестве управления продлением запаса времени до ухода с полосы.
[0027] Второе пороговое значение может быть фиксированным значением или может быть переменным значением. Второе пороговое значение может быть нулевым или может быть отрицательным значением. Второе пороговое значение может быть таким же значением, что и первое пороговое значение. В этом случае, устройство 100 управления транспортным средством выполняет управление продлением запаса времени до ухода с полосы одновременно с выводом тревожного сигнала.
[0028] Дополнительно, второе пороговое значение может быть значением меньше первого порогового значения. В этом случае, устройство 100 управления транспортным средством выполняет управление продлением запаса времени до ухода с полосы, когда водитель продолжает состояние высвобождения рук даже после вывода тревожного сигнала, и устройство 100 управления транспортным средством определяет, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше. Здесь, управление продлением запаса времени до ухода с полосы не повторяется бесконечно, а, например, выполняется только однажды или дважды для одного продолжения состояния высвобождения рук водителя. Управление продлением запаса времени до ухода с полосы может выполняться многократно до тех пор, пока число раз не достигнет предварительно заданного числа, или может выполняться многократно до тех пор, пока скорость транспортного средства M не станет ранее заданной скоростью (например, 40 км/ч) или менее.
[0029] Дополнительно, устройство 100 управления транспортным средством может выполнять управление продлением запаса времени до ухода с полосы перед выводом тревожного сигнала. Т.е., второе пороговое значение может быть значением больше первого порогового значения. Устройство 100 управления транспортным средством, например, выполняет управление продлением запаса времени до ухода с полосы только один раз. После этого, устройство 100 управления транспортным средством выводит тревожный сигнал, в случае определения, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше.
[0030] В последующем конфигурация устройства 100 управления транспортным средством согласно первому варианту осуществления будет описана со ссылкой на фиг. 1. Как показано на фиг. 1, устройство 100 управления транспортным средством включает в себя внешний датчик 1, блок 2 приема GPS [глобальная система позиционирования], внутренний датчик 3, базу данных 4 карт, навигационную систему 5, исполнительное устройство 6, HMI [интерфейс человек-машина] 7, и ECU [электронный блок управления] 10.
[0031] Внешний датчик 1 является обнаруживающим оборудованием, чтобы обнаруживать внешнюю ситуацию, которая является информацией об окружении транспортного средства M. Внешний датчик 1 включает в себя, по меньшей мере, камеру. Камера, например, предусматривается на задней стороне ветрового стекла транспортного средства M. Камера отправляет информацию формирования изображения, относящуюся к внешней ситуации транспортного средства M, в ECU 10. Камера может быть монокулярной камерой или может быть стереокамерой. Стереокамера включает в себя два блока формирования изображений, так что воспроизводится бинокулярный параллакс.
[0032] Внешний датчик 1 может включать в себя радар или LIDAR [лазерная система обнаружения и измерения дальности]. Радар обнаруживает препятствие за пределами транспортного средства M с помощью радиоволн (например, миллиметровой волны). Радар обнаруживает препятствие, посылая радиоволну вокруг транспортного средства M и принимая радиоволну, отраженную препятствием. Радар отправляет информацию об обнаруженном препятствии в ECU 10.
[0033] LIDAR обнаруживает препятствие за пределами транспортного средства M с помощью света. LIDAR обнаруживает препятствие, посылая свет вокруг транспортного средства M и принимая свет, отраженный препятствием, чтобы измерять расстояние до препятствия. LIDAR отправляет информацию об обнаруженном препятствии в ECU 10.
[0034] Блок 2 приема GPS принимает сигналы от трех или более GPS-спутников и, тем самым, измеряет позицию транспортного средства M (например, широту и долготу транспортного средства M). Блок 2 приема GPS отправляет информацию об измеренной позиции о транспортном средстве M в ECU 10. Здесь, другое средство, которое может идентифицировать широту и долготу транспортного средства M может быть использовано вместо блока 2 приема GPS.
[0035] Внутренний датчик 3 является обнаруживающим оборудованием, чтобы обнаруживать состояние движения транспортного средства M и операцию вождения водителем. Внутренний датчик 3, например, включает в себя датчик скорости, датчик ускорения и датчик скорости поворота вокруг вертикальной оси. Датчик скорости является детектором, чтобы обнаруживать скорость транспортного средства M. В качестве датчика скорости, например, используется датчик скорости колеса, который предусматривается на колесе транспортного средства M, приводном валу, который вращается как одно целое с колесом, или т.п., и который обнаруживает скорость вращения колеса. Датчик скорости отправляет информацию об обнаруженной скорости транспортного средства (информацию о скорости колеса) в ECU 10.
[0036] Датчик ускорения является детектором, чтобы обнаруживать ускорение транспортного средства M. Датчик ускорения, например, включает в себя датчик продольного ускорения, чтобы обнаруживать ускорение в продольном направлении транспортного средства M, и датчик поперечного ускорения, чтобы обнаруживать поперечное ускорение транспортного средства M. Датчик ускорения отправляет информацию об ускорении относительно транспортного средства M в ECU 10. Датчик скорости поворота вокруг вертикальной оси является детектором, чтобы обнаруживать скорость поворота вокруг вертикальной оси (угловую скорость вращения) вокруг вертикальной оси центра тяжести транспортного средства M. В качестве датчика скорости поворота вокруг вертикальной оси, например, может быть использован гиродатчик. Датчик скорости поворота вокруг вертикальной оси отправляет информацию об обнаруженной скорости поворота вокруг вертикальной оси относительно транспортного средства M в ECU 10.
[0037] Дополнительно, внутренний датчик 3, например, включает в себя датчик крутящего момента руления, датчик угла поворота рулевого колеса, датчик касания рулевого колеса, датчик педали акселератора и датчик педали тормоза. Например, датчик крутящего момента руления и датчик угла поворота рулевого колеса, которые предусматриваются на валу рулевого управления транспортного средства M, обнаруживать крутящий момент руления, обеспечиваемый рулевому колесу водителем, и угол поворота рулевого колеса для рулевого колеса, соответственно. В конструкцию необходимо включать лишь один из датчика крутящего момента руления и датчика угла поворота рулевого колеса. Например, датчик касания рулевого колеса, который предусматривается на рулевом колесе транспортного средства M, обнаруживает соприкосновение водителя с рулевым колесом и давление удерживания водителя на рулевом колесе. В качестве датчика касания рулевого колеса, например, может быть использован чувствительный к давлению датчик. Датчик крутящего момента руления, датчик угла поворота рулевого колеса и датчик касания рулевого колеса отправляют обнаруженную информацию руления относительно рулевого управления водителем в ECU 10.
[0038] Например, датчик педали акселератора, который предусматривается на детали типа вала педали акселератора, обнаруживает величину нажатия на педаль акселератора (позицию педали акселератора). Датчик педали акселератора отправляет сигнал, соответствующий обнаруженной величине нажатия педали акселератора, в ECU 10. Например, датчик педали тормоза, который предусматривается на детали типа вала педали тормоза, обнаруживает величину нажатия на педаль тормоза (позицию педали тормоза). Сила воздействия на педаль тормоза (сила нажатия на педаль тормоза, давление главного цилиндра или т.п.) может быть обнаружена. Датчик педали тормоза отправляет информацию о срабатывании тормоза, относящуюся к обнаруженной величине нажатия или величине воздействия на педаль тормоза, в ECU 10. Кроме того, внутренний датчик 3 может включать в себя датчик рычага переключения передач, чтобы обнаруживать действие рычага переключения передач, и может включать в себя датчик указателя направления, чтобы обнаруживать действие указателя направления.
[0039] Кроме того, внутренний датчик 3 может включать в себя камеру наблюдения за водителем, чтобы формировать изображение водителя. Камера наблюдения за водителем, например, предусматривается в позиции, которая находится на обшивке рулевой колонки транспортного средства M и которая находится спереди водителя. Множество камер наблюдения за водителем могут быть предусмотрены для формирования изображения водителя с множества направлений. Камера наблюдения за водителем отправляет информацию формирования изображения о водителе в ECU 10.
[0040] Картографическая база данных 4 является базой данных, включающей в себя картографическую информацию. Картографическая база данных, например, формируется на HDD [накопителе на жестком диске], который устанавливается в транспортное средство. Картографическая информация, например, включает в себя позиционную информацию о дорогах, информацию о формах дорог (например, типы поворотов и прямых частей, кривизны поворотов или т.п.) и позиционную информацию о пересечениях и перекрестках. Картографическая информация может включать в себя информацию о ширине дорог и может включать в себя позиционную информацию об экранирующих конструкциях, таких как здания и стены. Здесь, картографическая база данных 4 не всегда должна быть установлена в транспортном средстве M, а может храниться на компьютере, который находится в учреждении, таком как центр обработки информации, и который может связываться с транспортным средством M.
[0041] Навигационная система 5 является устройством, чтобы направлять водителя транспортного средства M к пункту назначения, заданному водителем транспортного средства M. Навигационная система 5 вычисляет маршрут, по которому транспортное средство M движется, на основе позиционной информации о транспортном средстве M, измеренной посредством блока 2 приема GPS и картографической информации картографической базы данных 4. В качестве маршрута соответствующая полоса может быть указана на отрезке из множества полос. Навигационная система 5, например, вычисляет целевой маршрут от позиции транспортного средства M до пункта назначения и информирует водителя о целевом маршруте посредством указания на дисплее или голосового вывода из динамика. Целевой маршрут может включать в себя информацию об отрезках, на которых транспортное средство M должно выполнять смену полосы. Навигационная система 5, например, отправляет информацию о целевом маршруте для транспортного средства M в ECU 10. Навигационная система 5 используется, например, когда устройство 100 управления транспортным средством выполняет автоматическое вождение. Навигационная система 5 может включать в себя блок связи, чтобы выполнять беспроводную связь с другими транспортными средствами или учреждениями, такими как центры обработки информации. Здесь, устройство 100 управления транспортным средством не всегда должно включать в себя навигационную систему 5.
[0042] Исполнительное устройство 6 является оборудованием, чтобы выполнять управление движением транспортного средства M. Исполнительное устройство 6 включает в себя, по меньшей мере, исполнительное устройство дроссельной заслонки, исполнительное устройство тормоза и исполнительное устройство рулевого управления. Исполнительное устройство дроссельной заслонки управляет интенсивностью подачи воздуха для двигателя (угол открытия дроссельной заслонки) в ответ на управляющий сигнал от ECU 10 и управляет движущей силой транспортного средства M. Здесь, в случае, когда транспортное средство M является гибридным транспортным средством или электронным транспортным средством, исполнительное устройство дроссельной заслонки не включен в конструкцию, и управляющий сигнал от ECU 10 вводится в мотор, который является источником динамической мощности, так что движущая сила управляется.
[0043] Исполнительное устройство тормоза управляет системой тормоза в ответ на управляющий сигнал от ECU 10 и управляет тормозной силой, которая предоставляется колесам транспортного средства M. В качестве тормозной системы, например, может быть использована гидравлическая тормозная система. Исполнительное устройство рулевого управления управляет приведением в действие вспомогательного мотора, т.е., системой рулевого управления с электроприводом, и который управляет крутящим моментом руления в ответ на управляющий сигнал от ECU 10. Таким образом, исполнительное устройство рулевого управления управляет крутящим моментом руления транспортного средства M.
[0044] HMI 7 является интерфейсом для выполнения ввода и вывода информации между водителем и устройством 100 управления транспортным средством. HMI 7 является интерфейсом для выполнения ввода и вывода информации между пассажиром (включая водителя) в транспортном средстве M и устройством 100 управления транспортным средством. HMI 7, например, включает в себя блок 7a отображения для отображения информации изображения для водителя, блок 7b голосового вывода для голосового вывода, операционную кнопку или сенсорную панель, посредством которых пассажир выполняет операцию ввода. Блок 7a отображения может быть выполнен посредством множества видов дисплеев. Например, блок 7a отображения включает в себя, по меньшей мере, один из MID комбинированного счетчика, центрального дисплея приборной панели, HUD [индикатор на лобовом стекле], носимого дисплея типа очков, который носит водитель, и т.п. Блок 7a отображения отображает информацию изображения в ответ на управляющий сигнал от ECU 10. Блок 7b голосового вывода является динамиком для предоставления уведомления водителю посредством вывода звукового сигнала тревоги или голоса. Блок 7b голосового вывода может быть выполнен посредством множества динамиков и может быть выполнен с возможностью включать в себя динамик, прикрепленный к транспортному средству M. Например, блок 7b голосового вывода включает в себя, по меньшей мере, один из динамика, предусмотренного на задней стороне приборной панели транспортного средства M, динамика, предусмотренного на внутренней стороне двери у водительского сиденья в транспортном средстве M и т.п. Блок 7b голосового вывода выводит звук сигнала тревоги или голос для водителя в ответ на управляющий сигнал от ECU 10. Здесь, блок 7a отображения и блок 7b голосового вывода не всегда должны составлять часть HMI 7.
[0045] Далее, будет описана функциональная конфигурация ECU 10. ECU 10 является электронным блоком управления, включающим в себя CPU [центральный процессор], ROM [постоянное запоминающее устройство], RAM [оперативное запоминающее устройство] и т.п. В ECU 10 программа, сохраненная в ROM, загружается в RAM и выполняется посредством CPU, и, таким образом, выполняются различные управления. ECU 10 может быть выполнен посредством множества электронных блоков управления. Здесь, некоторые из функций ECU 10 могут быть выполнены посредством компьютера, который находится в учреждении, таком как центр обработки информации, и который может связываться с транспортным средством M.
[0046] ECU 10 включает в себя блок 11 распознавания состояния движения, блок 12 распознавания поперечной позиции, блок 13 вычисления запаса времени до ухода с полосы, блок 14 измерения продолжительности времени высвобождения рук, блок 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления и блок 17 управления.
[0047] Блок 11 распознавания состояния движения распознает состояние движения транспортного средства M на основе результата обнаружения внутреннего датчика 3. Состояние движения транспортного средства M включает в себя, по меньшей мере, скорость транспортного средства для транспортного средства M и скорость поворота вокруг вертикальной оси транспортного средства M. Состояние движения транспортного средства M может включать в себя ускорение (замедление) транспортного средства M. Блок 11 распознавания состояния движения, например, распознает скорость транспортного средства для транспортного средства M на основе информации о скорости транспортного средства датчика скорости. Блок 11 распознавания состояния движения, например, распознает скорость поворота вокруг вертикальной оси транспортного средства M на основе информации о скорости поворота вокруг вертикальной оси датчика скорости поворота вокруг вертикальной оси. Блок 11 распознавания состояния движения, например, распознает ускорение транспортного средства M на основе информации об ускорении датчика ускорения.
[0048] Блок 12 распознавания поперечной позиции распознает поперечную позицию транспортного средства M относительно полосы R1 движения и ориентацию транспортного средства M относительно полосы R1 движения на основе результата обнаружения внешнего датчика 1. Блок 12 распознавания поперечной позиции, например, распознает белые линии L1, L2 полосы R1 движения на основе информации формирования изображений камеры. Блок 12 распознавания поперечной позиции, например, распознает поперечную позицию, которая является интервалами в поперечном направлении (направлении ширины полосы R1 движения) между белыми линиями L1, L2 и транспортным средством M, на основе информации формирования изображений камеры, посредством хорошо известного способа обработки изображения. Дополнительно, блок 12 распознавания поперечной позиции, например, распознает ориентацию транспортного средства M относительно полосы R1 движения (ориентацию транспортного средства M относительно белой линии L1 или белой линии L2) на основе информации формирования изображений камеры, посредством хорошо известного способа обработки изображения. Здесь, блок 12 распознавания поперечной позиции не всегда должен использовать информацию формирования изображений камеры, а может использовать распознавание белой линии посредством радара.
[0049] Блок 13 вычисления запаса времени до ухода с полосы вычисляет запас времени до ухода с полосы, который является временем до тех пор, когда транспортное средство M отклоняется от полосы R1 движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства. Блок 13 вычисления запаса времени до ухода с полосы, например, вычисляет запас времени до ухода с полосы на основе состояния движения транспортного средства M и поперечной позиции и ориентации транспортного средства M относительно полосы R1 движения. Блок 13 вычисления запаса времени до ухода с полосы, например, вычисляет запас времени до ухода с полосы, объединяя хорошо известные способы (способ оптимизации и т.п.). Здесь, в случае, когда диапазон управления рулением и диапазон управления скоростью транспортного средства изменяются в зависимости от ситуации, блок 13 вычисления запаса времени до ухода с полосы вычисляет запас времени до ухода с полосы со ссылкой на текущий диапазон управления рулением и диапазон управления скоростью транспортного средства. Кроме того, со ссылкой на картографическую информацию, блок 13 вычисления запаса времени до ухода с полосы может вычислять запас времени до ухода с полосы на основе формы дороги впереди транспортного средства M. Кроме того, блок 13 вычисления запаса времени до ухода с полосы может вычислять запас времени до ухода с полосы на основе ширины дороги для полосы R1 движения и кривизны полосы R1 движения. Блок 13 вычисления запаса времени до ухода с полосы, например, распознает ширину дороги для полосы R1 движения и кривизну полосы R1 движения на основе позиционной информации о транспортном средстве M и картографической информации.
[0050] Блок 13 вычисления запаса времени до ухода с полосы, например, может выполнять вычисление как для случая, когда транспортное средство M отклоняется от белой полосы L1 с левой стороны полосы R1 движения, так и для случая, когда транспортное средство M отклоняется от белой полосы L2 с правой стороны полосы R1 движения. В этом случае, например, блок 13 вычисления запаса времени до ухода с полосы принимает более короткое из времен в качестве запаса времени до ухода с полосы. Дополнительно, блок 13 вычисления запаса времени до ухода с полосы может распознавать белую линию, более близкую к транспортному средству M, из белой линии L1 и белой линии L2, на основе поперечной позиции транспортного средства M относительно полосы R1 движения и может вычислять запас времени до ухода с полосы для случая, когда транспортное средство M отклоняется от белой полосы, более близкой к транспортному средству M.
[0051] Блок 14 измерения продолжительности времени высвобождения рук измеряет продолжительность времени высвобождения рук для водителя. Сначала, блок 14 измерения продолжительности времени высвобождения рук определяет, находится ли водитель в состоянии высвобождения рук, на основе результата обнаружения внутреннего датчика 3. Блок 14 измерения продолжительности времени высвобождения рук, например, определяет, находится ли водитель в состоянии высвобождения рук, на основе результата обнаружения датчика касания рулевого колеса. В случае распознавания того, что водитель не держит рулевое колесо, из результата обнаружения датчика касания рулевого колеса, блок 14 измерения продолжительности времени высвобождения рук определяет, что водитель находится в состоянии высвобождения рук.
[0052] Даже в случае распознавания того, что водитель не удерживает рулевое колесо, из результата обнаружения датчика касания рулевого колеса, блок 14 измерения продолжительности времени высвобождения рук может определять, что водитель не находится в состоянии высвобождения рук, когда операция вождения водителем обнаруживается на основе результатов обнаружения датчика педали акселератора, датчика педали тормоза и т.п. Операция водительского управления может включать в себя операцию рычага переключения передач и операцию указателя направления. Операция водительского управления может включать в себя операцию ввода в навигационную систему 5 и операцию ввода в HMI 7.
[0053] Здесь, блок 14 измерения продолжительности времени высвобождения рук может определять, что водитель находится в состоянии высвобождения рук, в случае распознавания того, что водитель не выполняет какую-либо операцию водительского управления, на основе результатов обнаружения датчика крутящего момента руления, датчика педали скорости и датчика педали тормоза. В этом случае датчик касания рулевого колеса не нужен. В случае определения того, что водитель находится в состоянии высвобождения рук, блок 14 измерения продолжительности времени высвобождения рук начинает измерение продолжительности времени высвобождения рук, которая является временем, в течение которого водитель продолжает состояние высвобождения рук. В случае определения того, что водитель не находится в состоянии высвобождения рук после начала измерения продолжительности времени высвобождения рук, блок 14 измерения продолжительности времени высвобождения рук завершает измерение продолжительности времени высвобождения рук.
[0054] Блок 15 распознавания состояния водителя распознает состояние водителя. Блок 15 распознавания состояния водителя, например, распознает, находится ли водитель в состоянии низкой активности, на основе информации формирования изображения камеры наблюдения за водителем. Состояние низкой активности, например, является состоянием, в котором водитель находится в оцепенении вследствие депривации сна или т.п. Состояние низкой активности включает в себя также состояние сна. Блок 15 распознавания состояния водителя может распознавать, посредством хорошо известного способа, находится ли водитель в состоянии низкой активности, на основе состояния открытия глаз и других состояний водителя, которые получаются из информации формирования изображения камеры наблюдения за водителем. Блок 15 распознавания состояния водителя может распознавать, находится ли водитель в состоянии низкой активности, из информации о сердцебиении или информации мозговой волны о водителе, которая получается, через беспроводное соединение, посредством связи с пригодным для носки устройством, носимым водителем, или переносным информационным терминалом. Блок 15 распознавания состояния водителя может распознавать, посредством хорошо известного способа, находится ли водитель в состоянии низкой активности, на основе разнообразной информации.
[0055] Дополнительно, блок 15 распознавания состояния водителя, например, распознает, находится ли водитель в состоянии отведения взгляда, на основе информации формирования изображения камеры наблюдения за водителем. Состояние отведения взгляда, например, является состоянием, в котором водитель ориентирует свое лицо в направлении, отличном от направления движения вперед транспортного средства M. Блок 15 распознавания состояния водителя может распознавать, находится ли водитель в состоянии отведения взгляда, например, выполняя обнаружение пристального взгляда глаз для водителя из информации формирования изображений камеры наблюдения за водителем посредством хорошо известного способа. В случае распознавания того, что водитель эксплуатирует переносной информационный терминал, посредством связи с переносным информационным терминалом через беспроводное соединение, блок 15 распознавания состояния водителя может распознавать, что водитель находится в состоянии отведения взгляда. Блок 15 распознавания состояния водителя может распознавать, посредством хорошо известного способа, находится ли водитель в состоянии отведения взгляда, на основе разнообразной информации.
[0056] Кроме того, блок 15 распознавания состояния водителя может распознавать позу водителя. Блок 15 распознавания состояния водителя, например, распознает, является ли поза водителя подходящей позой для операции водительского управления, на основе информации формирования изображений камеры наблюдения за водителем. Блок 15 распознавания состояния водителя распознает, является ли поза водителя подходящей позой для операции водительского управления, например, из позиций ног водителя, угла спинки сиденья. Например, в случае, когда водитель скрещивает свои ноги, блок 15 распознавания состояния водителя распознает, что поза водителя не является подходящей позой для операции водительского управления. В случае, когда водитель держит переносной информационный терминал в своей руке, блок 15 распознавания состояния водителя может распознавать, что поза водителя не является подходящей позой для операции водительского управления.
[0057] Дополнительно, блок 15 распознавания состояния водителя может определять тип водителя для водителя. Тип водителя, например, включает в себя тип водителя, которому нравится быстрая езда (например, спортивный тип), и обычный тип водителя (например, нормальный тип). Например, в типе водителя, которому нравится быстрая езда, в качестве предпочтений вождения водителя, частота смены полосы для проезда является высокой, когда водитель выполняет операцию вождения транспортного средства M. Блок 15 распознавания состояния водителя, например, определяет тип водителя для водителя на основе истории прошлого вождения для водителя. Блок 15 распознавания состояния водителя может определять тип водителя для водителя на основе настройки, которая вводится водителем заранее. Здесь, ECU 10 не всегда должен включать в себя блок 15 распознавания состояния водителя.
[0058] Блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления на основе продолжительности времени высвобождения рук, измеренной посредством блока 14 измерения продолжительности времени высвобождения рук. Блок 16 оценки времени возврата водительского управления, например, оценивает время возврата водительского управления из продолжительности времени высвобождения рук с помощью данных соответствия или числовой формулы, которая предварительно сохраняется. Здесь, фиг. 3 – это график, определяющий соотношение между продолжительностью времени высвобождения рук и временем возврата водительского управления. На фиг. 3 ордината указывает продолжительность времени высвобождения рук (единица измерения: секунда), и абсцисса указывает время возврата водительского управления (единица измерения: секунда). Блок 16 оценки времени возврата водительского управления, например, использует соотношение из графика, показанного на фиг. 3, в качестве данных соответствия, и, тем самым, оценивает время возврата водительского управления из продолжительности времени высвобождения рук. На фиг. 3, в качестве примера, в случае, когда продолжительность времени высвобождения рук равна 27 секундам, время возврата водительского управления может быть оценено как 0,8 секунд.
[0059] Блок 16 оценки времени возврата водительского управления может оценивать время возврата водительского управления с помощью результата распознавания блока 15 распознавания состояния водителя, в дополнение к продолжительности времени высвобождения рук. Например, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления как более длительное, чем в случае, когда водитель распознается как находящийся не в состоянии низкой активности. Блок 16 оценки времени возврата водительского управления может применять режим добавления ранее заданного времени задержки к времени возврата водительского управления в случае, когда водитель распознается как находящийся в состоянии низкой активности.
[0060] Аналогично, например, в случае, когда водитель распознается как находящийся в состоянии отведения взгляда посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления как более длительное, чем в случае, когда водитель распознается как находящийся не в состоянии отведения взгляда. Блок 16 оценки времени возврата водительского управления может применять режим добавления ранее заданного времени задержки к времени возврата водительского управления в случае, когда водитель распознается как находящийся в состоянии отведения взгляда.
[0061] Дополнительно, в случае, когда поза водителя определяется как несоответствующая позе для операции вождения посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления может оценивать время возврата водительского управления как более длительное, чем в случае, когда поза водителя определяется как соответствующая поза для операции вождения. Блок 16 оценки времени возврата водительского управления может применять режим добавления ранее заданного времени задержки к времени возврата водительского управления в случае, когда поза водителя определяется как несоответствующая поза для операции вождения.
[0062] Дополнительно, в случае, когда тип водителя для водителя определяется посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления может оценивать время возврата водительского управления, принимая во внимание тип водителя. Блок 16 оценки времени возврата водительского управления, например, использует различные типы данных соответствия между случаем, когда водитель является типом водителя, который предпочитает быструю езду, и случаем, когда водитель является обычным типом водителя. Например, в случае, когда водитель является обычным типом водителя, блок 16 оценки времени возврата водительского управления может использовать, например, данные соответствия, соответствующие фиг. 3. С другой стороны, например, в случае, когда водитель является типом водителя, который предпочитает быструю езду, блок 16 оценки времени возврата водительского управления может использовать данные соответствия, которые ниже данных соответствия, соответствующих фиг. 3, в степени увеличения времени возврата водительского управления относительно продолжительности времени высвобождения рук, поскольку очевидно, что водитель возвращается к операции водительского управления с более быстрой скоростью в ответ на тревожный сигнал.
[0063] Здесь, блок 16 оценки времени возврата водительского управления может изменять данные соответствия в зависимости от частоты состояния высвобождения рук водителя. Например, в случае, когда водитель повторяет состояние высвобождения рук с частотой некоторого числа раз или более в единичном периоде, блок 16 оценки времени возврата водительского управления может использовать данные соответствия, которые выше в степени увеличения времени возврата водительского управления относительно продолжительности времени высвобождения рук, по сравнению со случаем, когда водитель не повторяет состояние высвобождения рук с частотой некоторого числа раз или более в единичном периоде.
[0064] Блок 17 управления определяет, равна ли разница между запасом времени до ухода с полосы, вычисленным посредством блока 13 вычисления запаса времени до ухода с полосы, и временем возврата водительского управления, оцененным посредством блока 16 оценки времени возврата водительского управления, первому пороговому значению или меньше. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, блок 17 управления выводит тревожный сигнал водителю. Блок 17 управления, например, посылает сигнал управления в HMI 7, и, тем самым, выводит тревожный сигнал посредством отображения изображения блока 7a отображения и тревожный сигнал посредством голосового вывода блока 7b голосового вывода. Тревожные сигналы, например, являются отображением изображения и голосовым выводом, имеющими содержимое, которое побуждает водителя удерживать рулевое колесо. Здесь, тревожный сигнал может быть одним из отображения изображения и голосового вывода. В случае распознавания того, что водитель эксплуатирует переносной информационный терминал, блок 17 управления может выводить тревожный сигнал через переносной информационный терминал.
[0065] Здесь, блок 17 управления может выводить тревожный сигнал множество раз. Блок 17 управления может задавать множество пороговых значений, которые меньше первого порогового значения, и может выводить тревожный сигнал всякий раз, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, становится равной или меньше любого одного из пороговых значений.
[0066] Кроме того, блок 17 управления определяет, равна ли разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, второму пороговому значению или меньше. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше, блок 17 управления выполняет управление продлением запаса времени до ухода с полосы посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Блок 17 управления выполняет управление продлением запаса времени до ухода с полосы, например, отправляя управляющий сигнал приводу 6. Здесь, блок 17 управления, например, может выполнять управление продлением запаса времени до ухода с полосы посредством ограничения диапазона управления рулением только в случае определения того, что рулевое управление транспортным средством M необходимо, поскольку транспортное средство M отклоняется от полосы R1 движения, в минимальное время. Дополнительно, блок 17 управления может определять содержимое выполнения управления продлением запаса времени до ухода с полосы на основе формы дороги для полосы R1 движения. Т.е., в случае определения того, что форма дороги для полосы R1 движения, по которой транспортное средство M движется, или полоса R1 движения впереди транспортного средства M является изогнутой, на основе картографической информации и т.п., блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы не посредством ограничения диапазона управления рулением, а посредством замедления транспортного средства M, для того, чтобы избегать ограничения диапазона управления рулением от помех движению в повороте транспортного средства M.
[0067] Блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы одновременно с выводом тревожного сигнала, описанного выше. В этом случае, в качестве второго порогового значения и первого порогового значения одно и то же значение может быть принято. Альтернативно, в качестве второго порогового значения, значение, меньшее, чем первое пороговое значение, может быть применено, и блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы в случае, когда водитель продолжает состояние высвобождения рук даже после тревожного сигнала. В качестве второго порогового значения, значение, большее, чем первое пороговое значение, может быть принято, и блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы перед тревожным сигналом. В этом случае, например, после выполнения управления продлением запаса времени до ухода с полосы однократно, блок 17 управления не выполняет управление продлением запаса времени до ухода с полосы, даже когда вышеупомянутая разница становится вторым пороговым значением или меньше снова. Альтернативно, блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы множество раз. В этом случае, блок 17 управления может выводить тревожный сигнал всякий раз, когда выполняется управление продлением запаса времени до ухода с полосы. Блок 17 управления может повторять управление продлением запаса времени до ухода с полосы до тех пор, пока число раз не достигнет предварительно заданного числа (например, дважды), или может повторять управление продлением запаса времени до ухода с полосы до тех пор, пока скорость транспортного средства M не станет ранее заданной скоростью (например, 40 км/ч) или менее. Наконец, в случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, блок 17 управления выводит тревожный сигнал водителю.
[0068] Здесь, в случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, блок 17 управления не должен выводить тревожный сигнал немедленно, а может выводить тревожный сигнал по истечение некоторого времени. Дополнительно, в случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, блок 17 управления может выполнять управление продлением запаса времени до ухода с полосы сначала и может выводить тревожный сигнал одновременно с завершением управления продлением запаса времени до ухода с полосы. Здесь, блок 17 управления не всегда должен выполнять управление продлением запаса времени до ухода с полосы.
[0069] Блок 17 управления может изменять первое пороговое значение. Блок 17 управления, например, изменяет первое пороговое значение в зависимости от скорости транспортного средства для транспортного средства M. Блок 17 управления может задавать первое пороговое значение в большее значение, когда скорость транспортного средства для транспортного средства M увеличивается. Дополнительно, блок 17 управления изменяет первое пороговое значение в зависимости от ускорения транспортного средства M. Блок 17 управления может задавать первое пороговое значение в большее значение, когда ускорение транспортного средства для транспортного средства M увеличивается. Блок 17 управления может изменять первое пороговое значение в зависимости от формы дороги. Например, в случае, когда форма дороги, по которой транспортное средство M движется, является изогнутой дорогой, блок 17 управления задает большее значение по сравнению со случаем, когда форма дороги является прямой формой.
[0070] Дополнительно, блок 17 управления может изменять первое пороговое значение на основе результата распознавания блока 15 распознавания состояния водителя. Например, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока 15 распознавания состояния водителя, блок 17 управления задает первое пороговое значение в большее значение по сравнению со случаем, когда водитель распознается как находящийся не в состоянии низкой активности. Аналогично, например, в случае, когда водитель распознается как находящийся в состоянии отведения взгляда посредством блока 15 распознавания состояния водителя, блок 17 управления задает первое пороговое значение в большее значение по сравнению со случаем, когда водитель распознается как находящийся не в состоянии отведения взгляда. Блок 17 управления может выполнять вышеописанные изменения порогового значения для второго порогового значения.
[0071] В случае, когда водитель продолжает состояние высвобождения рук даже после вывода тревожного сигнала, блок 17 управления может отменять управление транспортным средством для LTC или автоматического вождения. Например, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна четвертому пороговому значению или меньше, блок 17 управления отменяет управление транспортным средством для LTC или автоматического вождения и останавливает транспортное средство M на обочине дороги. Четвертое пороговое значение является значением, которое меньше первого порогового значения и второго порогового значения. Здесь, в сравнении между отрицательными значениями, значение, которое больше в абсолютном значении, меньше как пороговое значение.
[0072] <Способ управления посредством устройства управления транспортным средством согласно первому варианту осуществления>
В последующем, способ управления посредством устройства 100 управления транспортным средством согласно первому варианту осуществления будет описан со ссылкой на фиг. 4. Фиг. 4 – это блок-схема последовательности операций, показывающая способ управления посредством устройства 100 управления транспортным средством согласно первому варианту осуществления. Блок-схема, показанная на фиг. 4, например, выполняется многократно с предварительно заданным интервалом, в случае, когда транспортное средство M управляется так, что транспортное средство M движется по полосе R1 движения.
[0073] Как показано на фиг. 4, на этапе S101, ECU 10 выполняет вычисление запаса времени до ухода с полосы посредством блока 13 вычисления запаса времени до ухода с полосы. Блок 13 вычисления запаса времени до ухода с полосы вычисляет запас времени до ухода с полосы, который является временем (например, минимальным временем) до того момента, когда транспортное средство M отклоняется от полосы движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства. Блок 13 вычисления запаса времени до ухода с полосы вычисляет запас времени до ухода с полосы, например, на основе состояния движения транспортного средства M и поперечной позиции и ориентации транспортного средства M относительно полосы R1 движения. После вычисления запаса времени до ухода с полосы ECU 10 переходит к этапу S102.
[0074] На этапе S102 ECU 10 определяет, находится ли водитель в состоянии высвобождения рук, посредством блока 14 измерения продолжительности времени высвобождения рук. Блок 14 измерения продолжительности времени высвобождения рук, например, определяет, находится ли водитель в состоянии высвобождения рук, на основе результата обнаружения датчика касания рулевого колеса. В случае определения того, что водитель не находится в состоянии высвобождения рук (S102: Нет), ECU 10 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S101, после прохождения ранее заданного времени. В случае определения того, что водитель находится в состоянии высвобождения рук (S102: Да), ECU 10 начинает измерение продолжительности времени высвобождения рук посредством блока 14 измерения продолжительности времени высвобождения рук и переходит к этапу S103. Здесь, в случае, когда измерение продолжительности времени высвобождения рук уже было начато, блок 14 измерения продолжительности времени высвобождения рук не начинает измерение продолжительности времени высвобождения рук вновь, а продолжает текущее измерение продолжительности времени высвобождения рук.
[0075] На этапе S103 ECU 10 выполняет оценку времени возврата водительского управления посредством блока 16 оценки времени возврата водительского управления. Блок 16 оценки времени возврата водительского управления, например, оценивает время возврата водительского управления из продолжительности времени высвобождения рук с помощью данных соответствия или числовой формулы, которая предварительно сохраняется. Блок 16 оценки времени возврата водительского управления может оценивать время возврата водительского управления с помощью результата распознавания блока 15 распознавания состояния водителя, в дополнение к продолжительности времени высвобождения рук. Например, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления как более длительное время по сравнению со случаем, когда водитель распознается как находящийся не в состоянии низкой активности. Аналогично, например, в случае, когда водитель распознается как находящийся в состоянии отведения взгляда посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления как более длительное время по сравнению со случаем, когда водитель распознается как находящийся не в состоянии отведения взгляда.
[0076] Дополнительно, в случае, когда тип водителя для водителя определяется посредством блока 15 распознавания состояния водителя, блок 16 оценки времени возврата водительского управления может оценивать время возврата водительского управления, принимая во внимание тип водителя. Блок 16 оценки времени возврата водительского управления, например, оценивает время возврата водительского управления с помощью различных типов данных соответствия между случаем, когда водитель является типом водителя, который предпочитает быстрое движение, и случаем, когда водитель является обычным типом водителя. После того как блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления, ECU 10 переходит к этапу S104.
[0077] На этапе S104 ECU 10 определяет, равна ли разница, получающаяся из вычитания времени возврата водительского управления из запаса времени до ухода с полосы, первому пороговому значению или меньше, посредством блока 17 управления. Здесь, блок 17 управления может изменять первое пороговое значение. Например, блок 17 управления увеличивает первое пороговое значение, когда скорость транспортного средства для транспортного средства M увеличивается, и, тем самым, сдвигает на более ранний срок момент вывода тревожного сигнала. Увеличение первого порогового значения эквивалентно сокращению запаса времени до ухода с полосы посредством взвешивания запаса времени до ухода с полосы. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, больше первого порогового значения (этап S104: Нет), ECU 10 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S101, после прохождения ранее заданного времени. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше (этап S104: Да), ECU 10 переходит к этапу S105.
[0078] На этапе S105 ECU 10 выполняет вывод тревожного сигнала посредством блока 17 управления. Блок 17 управления, например, отправляет сигнал управления в HMI 7, и, тем самым, выводит тревожный сигнал посредством отображения изображения блока 7a отображения и тревожный сигнал посредством голосового вывода блока 7b голосового вывода. Дополнительно, одновременно с выводом тревожного сигнала, блок 17 управления выполняет управление продлением запаса времени до ухода с полосы посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Случай одновременного выполнения вывода тревожного сигнала и управления запасом времени до ухода с полосы таким образом является способом, когда первое пороговое значение, относящееся к выводу тревожного сигнала, и второе пороговое значение, относящееся к управлению продлением запаса времени до ухода с полосы, являются одним и тем же значением, например. Здесь, блок 17 управления может задавать различные значения в качестве первого порогового значения и второго порогового значения и может предусматривать задержку во времени между выводом тревожного сигнала и управлением продлением запаса времени до ухода с полосы. Здесь, не всегда необходимо выполнять управление продлением запаса времени до ухода с полосы. После выполнения вывода тревожного сигнала и управления продлением запаса времени до ухода с полосы, ECU 10 переходит к этапу S106. ECU 10 может переходить к этапу S106 после прохождения ранее заданного времени от выполнения вывода тревожного сигнала и выполнения управления продлением запаса времени до ухода с полосы. Здесь, ECU 10 не всегда должен выполнять управление продлением запаса времени до ухода с полосы.
[0079] На этапе S106 ECU 10 снова определяет, продолжает ли водитель состояние высвобождения рук, посредством блока 14 измерения продолжительности времени высвобождения рук. В случае определения того, что водитель не продолжает состояние высвобождения рук (S106: Нет), ECU 10 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S101, после прохождения ранее заданного времени. В случае определения того, что водитель продолжает состояния высвобождения рук (S106: Да), ECU 10 переходит к этапу S107.
[0080] На этапе S107 ECU 10 отменяет управление транспортным средством для LTC или автоматического вождения посредством блока 17 управления и останавливает транспортное средство M на обочине дороги. Блок 17 управления посылает управляющий сигнал приводу 6 и, тем самым, останавливает транспортное средство M на обочине дороги для полосы R1 движения.
[0081] Здесь, ECU 10 может отменять управление транспортным средством для LCT или автоматического вождения и останавливает транспортное средство M на обочине дороги, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна четвертому пороговому значению или меньше, вместо этапов S106 и S107. Четвертое пороговое значение является значением, которое меньше первого порогового значения. Дополнительно, не всегда необходимо выполнять этапы S106 и S107. Дополнительно, ECU 10 может выполнять этап S102 перед этапом S101, и может выполнять этап S102 и этап S103 перед этапом S101. В этом случае ECU 10 вычисляет запас времени до ухода с полосы в случае определения того, что водитель находится в состоянии высвобождения рук.
[0082] Кроме того, в течение измерения продолжительности времени высвобождения рук блок 14 измерения продолжительности времени высвобождения рук повторяет определение относительно того, находится ли водитель в состоянии высвобождения рук, с ранее заданным интервалом, отдельно от блок-схемы последовательности операций, показанной на фиг. 4. В случае определения того, что водитель не находится в состоянии высвобождения рук, блок 14 измерения продолжительности времени высвобождения рук завершает измерение продолжительности времени высвобождения рук. В случае, когда блок 14 измерения продолжительности времени высвобождения рук в течение измерения продолжительности времени высвобождения рук определяет, что водитель не находится в состоянии высвобождения рук, ECU 10 заканчивает процесс блок-схемы последовательности операций, показанной на фиг. 4. В случае определения того, что водитель не находится в состоянии высвобождения рук, ECU 10 заканчивает процесс блок-схемы последовательности операций, показанной на фиг. 4, даже во время вывода тревожного сигнала и управления продлением запаса времени до ухода с полосы. Затем, ECU 10 прекращает вывод тревожного сигнала и управления продлением запаса времени до ухода с полосы и возвращается к обычному управлению транспортным средством. После этого, ECU 10 повторяет процесс снова с этапа S101, после прохождения ранее заданного времени.
[0083] В устройстве 100 управления транспортным средством согласно первому варианту осуществления, описанному выше, принимая во внимание случай, когда ненормальность, такая как ложное распознавание, возникает в устройстве, тревожный сигнал выводится водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления для водителя из запаса времени до ухода с полосы, которое является временем до того момента, когда транспортное средство M отклоняется от полосы R1 движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которое может управляться посредством устройства, равно первому пороговому значению или меньше. Следовательно, согласно устройству 100 управления транспортным средством, представляется возможным выводить тревожный сигнал в момент времени, который планируется в соответствии с уходом транспортного средства M с полосы R1 движения, и предотвращать предоставление тревожным сигналом водителю чувства непривычности по сравнению с устройством связного уровня техники, которое выводит тревожный сигнал в заданное время в случае, когда водитель находится в состоянии высвобождения рук.
[0084] Дополнительно, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше, устройство 100 управления транспортным средством может выполнять управление продлением запаса времени до ухода с полосы посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. В этом случае, поскольку устройство 100 управления транспортным средством выполняет управление продлением запаса времени до ухода с полосы в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше, представляется возможным обеспечивать время для водителя, чтобы возвращаться к операции водительского управления, прежде чем транспортное средство M отклоняется от полосы движения, даже когда ненормальность, такая как ложное распознавание, возникает в устройстве, в то время как водитель продолжает состояние высвобождения рук, например.
[0085] Кроме того, в случае, когда водитель распознается как находящийся в состоянии низкой активности, устройство 100 управления транспортным средством может оценивать время возврата водительского управления как более длительное время по сравнению со случаем, когда водитель распознается как находящийся не в состоянии низкой активности. В этом случае, поскольку время для возврата к операции водительского управления в ответ на тревожный сигнал является длительным в случае, когда водитель находится в состоянии низкой активности, устройство 100 управления транспортным средством оценивает время возврата водительского управления как более длительное время в случае, когда водитель распознается как находящийся в состоянии низкой активности. Таким образом, представляется возможным оценивать время возврата водительского управления, соответствующее состоянию водителя.
[0086] Далее, будет описано устройство 101 управления транспортным средством согласно второму варианту осуществления. Фиг. 5 – это блок-схема, показывающая устройство 101 управления транспортным средством согласно второму варианту осуществления. Как показано на фиг. 5, устройство 101 управления транспортным средством согласно второму варианту осуществления отличается от устройства 100 управления транспортным средством согласно первому варианту осуществления тем, что запас времени до соприкосновения используется вместо запаса времени до ухода с полосы.
[0087] Запас времени до соприкосновения – это время (например, минимальное время) до того момента, когда транспортное средство M приходит в соприкосновение с препятствием около транспортного средства M в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которые заранее устанавливаются. Например, препятствием является такая конструкция как стена или здание, другое транспортное средство (движущееся впереди транспортное средство, другое транспортное средство, движущееся бок о бок, двухколесное транспортное средство, велосипед или т.п.) или пешеход. Соприкосновение между транспортным средством M и препятствием может включать в себя случай, когда расстояние между транспортным средством M и препятствием становится равным или меньше ранее заданного расстояния до соприкосновения, в дополнение к случаю, когда транспортное средство M и препятствие фактически приходят в соприкосновение друг с другом. Ранее заданное расстояние до соприкосновения может быть фиксированным значением (например, 0,5 м) или может быть переменным значением.
[0088] Например, если ненормальность, такая как ложное распознавание окружающей обстановки, возникает в устройстве 101 управления транспортным средством, и устройство 101 управления транспортным средством управляет транспортным средством M так, что транспортное средство M едет по направлению к препятствию в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, запас времени до соприкосновения соответствует минимальному времени до того момента, когда транспортное средство M приходит в соприкосновение с препятствием. Запас времени до соприкосновения может быть минимальным временем до того момента, когда транспортное средство M приходит в соприкосновение с препятствием посредством руления от устройства 101 управления транспортным средством, в то время как текущая скорость транспортного средства поддерживается. Минимальное время при этом не является минимальным временем до того момента, когда транспортное средство M приходит в соприкосновение с препятствием фактически, а вычисленным минимальным временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием гипотетически. Минимальное время изменяется в зависимости от способа вычисления или настройки параметров, которые должны быть использованы для вычисления.
[0089] Здесь, фиг. 6 – это вид сверху для описания запаса времени до соприкосновения. Фиг. 6 отличается от фиг. 2 только тем, что существует стена G в качестве препятствия. Фиг. 6 показывает ситуацию, в которой стена G не может быть распознана вследствие неисправности радара или т.п., и, посредством ложного распознавания белых линий, устройство 101 управления транспортным средством управляет транспортным средством M так, что транспортное средство M едет по направлению к стене G. В этом случае, устройство 101 управления транспортным средством, например, вычисляет запас времени до соприкосновения, которое является минимальным временем до того момента, когда транспортное средство M приходит в соприкосновение со стеной G в диапазоне управления рулением и диапазоне управления скоростью транспортного средства.
[0090] Фиг. 7 – это вид сверху для описания другого примера запаса времени до соприкосновения. Фиг. 7 показывает другое транспортное средство N, которое движется по соседней полосе R2, будущую позицию Nf другого транспортного средства N, которое будет ехать прямо по соседней полосе R2, и позицию Mf транспортного средства M в случае движения по полосе Rf1 движения. На фиг. 7, хотя фактическая полоса R1 движения и соседняя полоса R2 являются прямыми дорогами, устройство 101 управления транспортным средством ложно распознает полосу Rf1 движения и соседнюю полосу Rf2 движения как правые повороты. Дополнительно, фиг. 7 показывает ситуацию, в которой другое транспортное средство N не может быть распознано вследствие неисправности радара или т.п., и, посредством ложного распознавания белых полос устройством 101 управления транспортным средством, устройство 101 управления транспортным средством управляет транспортным средством M так, что транспортное средство M едет по направлению к будущей позиции Nf другого транспортного средства N. В этом случае, устройство 101 управления транспортным средством, например, вычисляет запас времени до соприкосновения, которое является минимальным временем до того момента, когда транспортное средство M приходит в соприкосновение с другим транспортным средством N в диапазоне управления рулением и диапазоне управления скоростью транспортного средства.
[0091] Здесь, устройство 101 управления транспортным средством может прогнозировать курс другого транспортного средства N для вычисления запаса времени до соприкосновения, но не должно прогнозировать курс другого транспортного средства N. В случае, когда информация о курсе относительно другого транспортного средства N может быть получена посредством использования связи между транспортными средствами или т.п., устройство 101 управления транспортным средством может вычислять запас времени до соприкосновения с помощью информации о курсе относительно другого транспортного средства N. Дополнительно, устройство 101 управления транспортным средством может определять, существует ли вероятность, что транспортное средство M приходит в соприкосновение с другим транспортным средством N посредством управления, которое устройство 101 управления транспортным средством выполняет в диапазоне управления рулением и диапазоне управления скоростью транспортного средства. Устройство 101 управления транспортным средством, например, вычисляет запас времени до соприкосновения в случае определения того, что существует вероятность, что транспортное средство M приходит в соприкосновение с другим транспортным средством N, и не вычисляет запас времени до соприкосновения в случае определения, что не существует вероятность, что транспортное средство M приходит в соприкосновение с другим транспортным средством N. Кроме того, устройство 101 управления транспортным средством может вычислять запас времени до соприкосновения, рассматривая другое транспортное средство N как стену, которая протягивается по соседней полосе R2, без прогнозирования курса другого транспортного средства N.
[0092] Кроме того, устройство 101 управления транспортным средством может вычислять запас времени до соприкосновения для множества препятствий, которые присутствуют около транспортного средства M. В этом случае, например, устройство 101 управления транспортным средством выводит тревожный сигнал только с помощью кратчайшего запаса времени до соприкосновения для того, чтобы избегать раздражения водителя повтором тревожного сигнала.
[0093] В случае определения того, что водитель находится в состоянии высвобождения рук после вычисления запаса времени до соприкосновения, устройство 101 управления транспортным средством определяет, равна ли разница между продолжительностью времени высвобождения рук и запасом времени до соприкосновения третьему пороговому значению или меньше. Третье пороговое значение – это значение, которое задается для вывода тревожного сигнала водителю в состоянии высвобождения рук в подходящий момент времени. Третье пороговое значение может быть фиксированным значением или может быть переменным значением. Третье пороговое значение может быть нулевым или может быть отрицательным значением. В качестве третьего порогового значения, например, большее значение может быть принято, когда скорость транспортного средства для транспортного средства M или ускорение транспортного средства M увеличивается. Например, в состоянии, когда форма дороги, по которой транспортное средство M движется, является изогнутой формой, большее значение может быть принято в качестве третьего порогового значения по сравнению со случаем, когда форма дороги является прямой формой. Принимая большее значение в качестве третьего порогового значения, представляется возможным переносить на более ранний срок момент тревожной сигнализации. Увеличение третьего порогового значения эквивалентно сокращению запаса времени до соприкосновения посредством взвешивания запаса времени до соприкосновения.
[0094] Дополнительно, аналогично первому варианту осуществления, в случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна второму пороговому значению или меньше, устройство 101 управления транспортным средством может выполнять управление продлением запаса времени до соприкосновения посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Второе пороговое значение может быть таким же значением, что и третье пороговое значение. Второе пороговое значение может быть значением, большим, чем третье пороговое значение, или может быть значением, меньшим, чем третье пороговое значение.
[0095] В последующем, конфигурация устройства 101 управления транспортным средством согласно второму варианту осуществления будет описана со ссылкой на фиг. 5 снова. Для элементов, идентичных или соответствующих элементам в первом варианте осуществления, назначаются идентичные ссылочные символы, и описания пропускаются.
[0096] Как показано на фиг. 5, ECU 20 устройства 101 управления транспортным средством отличается от ECU в первом варианте осуществления тем, что блок 21 получения информации о препятствии включается в него вместо блока 12 распознавания поперечной позиции, и тем, что блок 22 вычисления запаса времени до соприкосновения включается в него вместо блока 13 вычисления запаса времени до ухода с полосы.
[0097] Блок 21 получения информации о препятствии, например, получает информацию о препятствии, соответствующую препятствию около транспортного средства M, на основе результата обнаружения внешнего датчика 1. Блок 21 получения информации о препятствии, например, получает информацию о препятствии от радара. Информация о препятствии, например, включает в себя информацию, относящуюся к позиции препятствия и размеру препятствия. Информация о препятствии может включать в себя информацию, относящуюся к виду препятствия (тип конструкции, другое транспортное средство, пешеход или т.п.). В этом случае, например, блок 21 получения информации о препятствии может получать информацию, относящуюся к виду препятствия, на основе информации формирования изображений камеры, посредством хорошо известного способа.
[0098] Кроме того, блок 21 получения информации о препятствии может получать информацию о препятствии, посредством беспроводной связи, от компьютера в учреждении, таком как центр обработки информации, или другого транспортного средства, приспособленного к связи между транспортными средствами. Блок 21 получения информации о препятствии может получать информацию, относящуюся к твердости препятствия, с помощью хорошо известного способа оптического анализа, который использует датчик спектра. На основе информации о препятствии блок 21 получения информации о препятствии определяет, существует ли препятствие около транспортного средства M.
[0099] Блок 22 вычисления запаса времени до соприкосновения, например, вычисляет запас времени до соприкосновения, которое является временем до того момента, когда транспортное средство M приходит в соприкосновение с препятствием около транспортного средства M в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, на основе состояния движения транспортного средства M и информации о препятствии. Блок 22 вычисления запаса времени до соприкосновения, например, вычисляет запас времени до соприкосновения, объединяя хорошо известные способы (способ оптимизации и т.п.). Здесь, в случае, когда диапазон управления рулением и диапазон управления скоростью транспортного средства изменяются в зависимости от ситуации, блок 22 вычисления запаса времени до соприкосновения вычисляет запас времени до соприкосновения со ссылкой на текущий диапазон управления рулением и диапазон управления скоростью транспортного средства.
[0100] Блок 23 управления определяет, равна ли разница между запасом времени до соприкосновения, вычисленным посредством блока 22 вычисления запаса времени до соприкосновения, и временем возврата водительского управления, оцененным посредством блока 16 оценки времени возврата водительского управления, третьему пороговому значению или меньше. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше, блок 23 управления выводит тревожный сигнал водителю. Блок 23 управления, например, отправляет сигнал управления в HMI 7, и, тем самым, выводит тревожный сигнал посредством отображения изображения блока 7a отображения и тревожный сигнал посредством голосового вывода блока 7b голосового вывода. Тревожные сигналы, например, являются отображением изображения и голосовым выводом, имеющими содержимое, которое побуждает водителя удерживать рулевое колесо. Здесь, тревожный сигнал может быть одним из отображения изображения и голосового вывода.
[0101] Кроме того, блок 23 управления, например, определяет, равна ли разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, второму пороговому значению или меньше. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна второму пороговому значению или меньше, блок 23 управления выполняет управление продлением запаса времени до соприкосновения посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Блок 23 управления может выполнять управление продлением запаса времени до соприкосновения как посредством замедления транспортного средства M, так и ограничения диапазона управления рулением.
[0102] Здесь, блок 23 управления может выполнять управление продлением запаса времени до соприкосновения одновременно с выводом тревожного сигнала, описанного выше. Блок 23 управления может выполнять управление продлением запаса времени до соприкосновения после вывода тревожного сигнала или может выполнять управление продлением запаса времени до соприкосновения перед выводом тревожного сигнала. Блок 23 управления не всегда должен выполнять управление продлением запаса времени до соприкосновения.
[0103] Блок 23 управления может изменять третье пороговое значение. Блок 23 управления, например, изменяет третье пороговое значение в зависимости от скорости транспортного средства для транспортного средства M. Блок 23 управления может задавать третье пороговое значение в большее значение, когда скорость транспортного средства для транспортного средства M увеличивается. Дополнительно, блок 23 управления, например, изменяет третье пороговое значение в зависимости от ускорения транспортного средства M. Блок 23 управления может задавать третье пороговое значение в большее значение, когда ускорение транспортного средства M увеличивается. Блок 23 управления может изменять третье пороговое значение в зависимости от формы дороги. Например, в случае, когда форма дороги, по которой транспортное средство M движется, является изогнутой дорогой, блок 23 управления задает большее значение по сравнению со случаем, когда форма дороги является прямой дорогой.
[0104] Дополнительно, блок 23 управления может изменять третье пороговое значение на основе результата распознавания блока 15 распознавания состояния водителя. Например, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока 15 распознавания состояния водителя, блок 23 управления задает третье пороговое значение в большее значение по сравнению со случаем, когда водитель распознается как находящийся не в состоянии низкой активности. Аналогично, например, в случае, когда водитель распознается как находящийся в состоянии отведения взгляда посредством блока 15 распознавания состояния водителя, блок 23 управления задает третье пороговое значение в большее значение по сравнению со случаем, когда водитель распознается как находящийся не в состоянии отведения взгляда.
[0105] Дополнительно, блок 23 управления может изменять третье пороговое значение на основе состояния движения транспортного средства M и информации о препятствии. Например, из состояния движения транспортного средства M и информации о препятствии, блок 23 управления изменяет третье пороговое значение в зависимости от угла соприкосновения (так называемого угла соприкосновения), когда транспортное средство M приходит в соприкосновение с препятствием. Блок 23 управления, например, определяет переднюю сторону транспортного средства M в качестве нуля и устанавливает третье пороговое значение в большее значение, когда угол соприкосновения относительно препятствия увеличивается. Блок 23 управления, например, изменяет третье пороговое значение в зависимости от вида препятствия. В случае, когда препятствием является пешеход, блок 23 управления может увеличивать третье пороговое значение по сравнению со случаем, когда препятствием является конструкция. В случае, когда препятствием является другое транспортное средство, блок 23 управления может увеличивать третье пороговое значение по сравнению со случаем, когда препятствием является конструкция. Блок 23 управления может изменять третье пороговое значение в зависимости от твердости препятствия. Блок 23 управления, например, увеличивает третье пороговое значение, когда твердость препятствия увеличивается. Блок 23 управления может выполнять вышеописанные изменения порогового значения для второго порогового значения.
[0106] В последующем, способ управления посредством устройства 101 управления транспортным средством согласно второму варианту осуществления будет описан со ссылкой на фиг. 8. Фиг. 8 – это блок-схема последовательности операций, показывающая способ управления посредством устройства 101 управления транспортным средством согласно второму варианту осуществления. Блок-схема, показанная на фиг. 8, например, выполняется многократно с предварительно заданным интервалом, в случае, когда транспортное средство M управляется так, что транспортное средство M движется по полосе R1 движения.
[0107] Как показано на фиг. 8, на этапе S201, ECU 20 устройства 101 управления транспортным средством согласно второму варианту осуществления определяет, существует ли препятствие около транспортного средства M, посредством блока 21 получения информации о препятствии. Блок 21 получения информации о препятствии, например, определяет, существует ли препятствие около транспортного средства M, на основе информации о препятствии, полученной от радара. В случае определения того, что не существует препятствия около транспортного средства M (S201: Нет), ECU 20 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S201, после прохождения ранее заданного времени. В случае определения того, что существует препятствие около транспортного средства M (S201: Да), ECU 20 переходит к этапу S202.
[0108] На этапе S202 ECU 20 выполняет вычисление запаса времени до соприкосновения посредством блока 22 вычисления запаса времени до соприкосновения. Блок 22 вычисления запаса времени до соприкосновения вычисляет запас времени до соприкосновения, который является временем (например, минимальным временем) до того момента, когда транспортное средство M приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства. Блок 22 вычисления запаса времени до соприкосновения вычисляет запас времени до соприкосновения, например, на основе состояния движения транспортного средства M, распознанного посредством блока 11 распознавания состояния движения, и информации о препятствии, полученной посредством блока 21 получения информации о препятствии. После вычисления запаса времени до соприкосновения ECU 20 переходит к этапу S203.
[0109] На этапе S203 ECU 20 определяет, находится ли водитель в состоянии высвобождения рук, посредством блока 14 измерения продолжительности времени высвобождения рук. Этап S203 является таким же процессом, что и этап S102 на фиг. 4. В случае определения того, что водитель не находится в состоянии высвобождения рук (S203: Нет), ECU 20 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S201, после прохождения ранее заданного времени. В случае определения того, что водитель находится в состоянии высвобождения рук (S203: Да), ECU 20 начинает измерение продолжительности времени высвобождения рук посредством блока 14 измерения продолжительности времени высвобождения рук и переходит к этапу S204. Здесь, в случае, когда измерение продолжительности времени высвобождения рук уже было начато, блок 14 измерения продолжительности времени высвобождения рук не начинает измерение продолжительности времени высвобождения рук вновь, а продолжает текущее измерение продолжительности времени высвобождения рук.
[0110] На этапе S204 ECU 20 выполняет оценку времени возврата водительского управления посредством блока 16 оценки времени возврата водительского управления. Этап S204 является таким же процессом, что и этап S103 на фиг. 4. После того как блок 16 оценки времени возврата водительского управления оценивает время возврата водительского управления, ECU 20 переходит к этапу S205.
[0111] На этапе S205 ECU 20 определяет, равна ли разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, третьему пороговому значению или меньше, посредством блока 23 управления. Здесь, блок 23 управления может изменять третье пороговое значение. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, больше третьего порогового значения (этап S205: Нет), ECU 20 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S201, после прохождения ранее заданного времени. В случае определения того, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше (этап S205: Да), ECU 20 переходит к этапу S206.
[0112] На этапе S206 ECU 20 выполняет вывод тревожного сигнала посредством блока 23 управления. Дополнительно, одновременно с выводом тревожного сигнала, блок 23 управления выполняет управление продлением запаса времени до соприкосновения посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. Этап S206 является таким же процессом, что и этап S105 на фиг. 4. Например, после выполнения вывода тревожного сигнала и управления продлением запаса времени до соприкосновения, ECU 20 переходит к этапу S207. Здесь, ECU 20 не всегда должен выполнять управление продлением запаса времени до соприкосновения.
[0113] На этапе S207, снова ECU 20 определяет, находится ли водитель в состоянии высвобождения рук, посредством блока 14 измерения продолжительности времени высвобождения рук. Этап S207 является таким же процессом, что и этап S106 на фиг. 4. В случае определения того, что водитель не находится в состоянии высвобождения рук (S207: Нет), ECU 20 заканчивает процесс на этот раз. После этого, процесс повторяется снова с этапа S201, после прохождения ранее заданного времени. В случае определения того, что водитель продолжает состояния высвобождения рук (S207: Да), ECU 20 переходит к этапу S208.
[0114] На этапе S208 ECU 20 отменяет управление транспортным средством для LTC или автоматического вождения посредством блока 23 управления и останавливает транспортное средство M на обочине дороги. Этап S208 является таким же процессом, что и этап S107 на фиг. 4. Блок 23 управления посылает управляющий сигнал приводу 6 и, тем самым, останавливает транспортное средство M на обочине дороги для полосы R1 движения.
[0115] Здесь, ECU 20 может отменять управление транспортным средством для LCT или автоматического вождения и останавливает транспортное средство M на обочине дороги, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна четвертому пороговому значению или меньше, вместо этапов S207 и S208. Четвертое пороговое значение является значением, которое меньше третьего порогового значения. Дополнительно, не всегда необходимо выполнять этапы S207 и S208. Дополнительно, ECU 20 может выполнять этап S203 перед этапом S202 и может выполнять этап S203 и этап S204 перед этапом S202. В этом случае ECU 20 вычисляет запас времени до соприкосновения в случае определения того, что водитель находится в состоянии высвобождения рук.
[0116] Дополнительно, в течение измерения продолжительности времени высвобождения рук, блок 14 измерения продолжительности времени высвобождения рук повторяет определение относительно того, находится ли водитель в состоянии высвобождения рук, с ранее заданным интервалом, отдельно от блок-схемы последовательности операций, показанной на фиг. 8. В случае определения того, что водитель не находится в состоянии высвобождения рук, блок 14 измерения продолжительности времени высвобождения рук завершает измерение продолжительности времени высвобождения рук. В случае, когда блок 14 измерения продолжительности времени высвобождения рук в течение измерения продолжительности времени высвобождения рук определяет, что водитель не находится в состоянии высвобождения рук, ECU 20 заканчивает процесс блок-схемы последовательности операций, показанной на фиг. 8. В случае определения того, что водитель не находится в состоянии высвобождения рук, ECU 20 заканчивает процесс блок-схемы последовательности операций, показанной на фиг. 8, даже во время вывода тревожного сигнала и управления продлением запаса времени до ухода с полосы. Затем, ECU 20 прекращает вывод тревожного сигнала и управления продлением запаса времени до ухода с полосы и возвращается к обычному управлению транспортным средством. После этого, ECU 20 повторяет процесс снова с этапа S201, после прохождения ранее заданного времени.
[0117] В устройстве 101 управления транспортным средством согласно второму варианту осуществления, описанному выше, принимая во внимание случай, когда ненормальность, такая как ложное распознавание, возникает в устройстве, тревожный сигнал выводится водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления для водителя из запаса времени до соприкосновения, которое является временем до того момента, когда транспортное средство M приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, которое может управляться посредством устройства, равно третьему пороговому значению или меньше. Следовательно, согласно устройству 101 управления транспортным средством, представляется возможным выводить тревожный сигнал в момент времени, который планируется в соответствии с соприкосновением транспортного средства M с препятствием, и предотвращать предоставление тревожным сигналом водителю чувства непривычности по сравнению с устройством связного уровня техники, которое выводит тревожный сигнал в заданное время в случае, когда водитель находится в состоянии высвобожденных рук.
[0118] Дополнительно, в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна второму пороговому значению или меньше, устройство 101 управления транспортным средством может выполнять управление продлением запаса времени до соприкосновения посредством, по меньшей мере, одного из замедления транспортного средства M и ограничения диапазона управления рулением. В этом случае, поскольку устройство 101 управления транспортным средством выполняет управление продлением запаса времени до соприкосновения в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна второму пороговому значению или меньше, представляется возможным обеспечивать время для водителя, чтобы возвращаться к операции водительского управления, прежде чем транспортное средство M приходит в соприкосновение с препятствием, даже когда ненормальность, такая как ложное распознавание, возникает в устройстве, в то время как водитель продолжает состояние высвобождения рук, например.
[0119] Кроме того, в случае, когда водитель распознается как находящийся в состоянии низкой активности, устройство 101 управления транспортным средством может оценивать время возврата водительского управления как более длительное время по сравнению со случаем, когда водитель распознается как находящийся не в состоянии низкой активности. В этом случае, поскольку время для возврата к операции водительского управления в ответ на тревожный сигнал является длительным в случае, когда водитель находится в состоянии низкой активности, устройство 101 управления транспортным средством оценивает время возврата водительского управления как более длительное время в случае, когда водитель распознается как находящийся в состоянии низкой активности. Таким образом, представляется возможным оценивать время возврата водительского управления, соответствующее состоянию водителя.
[0120] Таким образом, предпочтительные варианты осуществления изобретения были описаны, но изобретение не ограничивается вышеописанными вариантами осуществления. Например, компоненты вариантов осуществления могут быть соответствующим образом объединены и использованы. Дополнительно, изобретение может быть выполнено во множестве режимов, в которых различные модификации и улучшения выполняются на основе знания специалиста в области техники, включающей в себя вышеописанные варианты осуществления.
[0121] Например, устройство 100 управления транспортным средством согласно первому варианту осуществления может выводить тревожный сигнал, принимая во внимание запас времени до соприкосновения согласно второму варианту осуществления. В частности, устройство 100 управления транспортным средством согласно первому варианту осуществления может включать в себя блок 21 получения информации о препятствии и блок 22 вычисления запаса времени до соприкосновения согласно второму варианту осуществления и может выводить тревожный сигнал водителю в случае, когда блок 17 управления определяет, что разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше. Дополнительно, устройство 100 управления транспортным средством может выполнять обе из блок-схемы последовательности операций, показанной на фиг. 4, и блок-схемы последовательности операций, показанной на фиг. 8. Общие этапы могут выполняться в один и тот же момент времени. Таким образом, в случае, когда не существует препятствия около транспортного средства M, устройство 100 управления транспортным средством может выводить тревожный сигнал в подходящий момент времени, принимая во внимание уход с полосы R1 движения, и в случае, когда существует препятствие около транспортного средства M, устройство 100 управления транспортным средством может выводить тревожный сигнал в подходящий момент времени, принимая во внимание соприкосновение с препятствием.
[0122] Здесь, для вывода тревожного сигнала, относящегося к соприкосновению между транспортным средством M и препятствием, своевременно, устройство 100 управления транспортным средством может принимать значение больше первого порогового значения в качестве третьего порогового значения. Дополнительно, третье пороговое значение может быть таким же значением, что и первое пороговое значение, или может быть значением меньше первого порогового значения. Дополнительно, устройство 100 управления транспортным средством не должно выводить оба из тревожного сигнала, относящегося к уходу транспортного средства M с полосы R1 движения, и тревожного сигнала, относящегося к соприкосновению транспортного средства M с препятствием, а может выводить только тревожный сигнал, который существует раньше по времени.
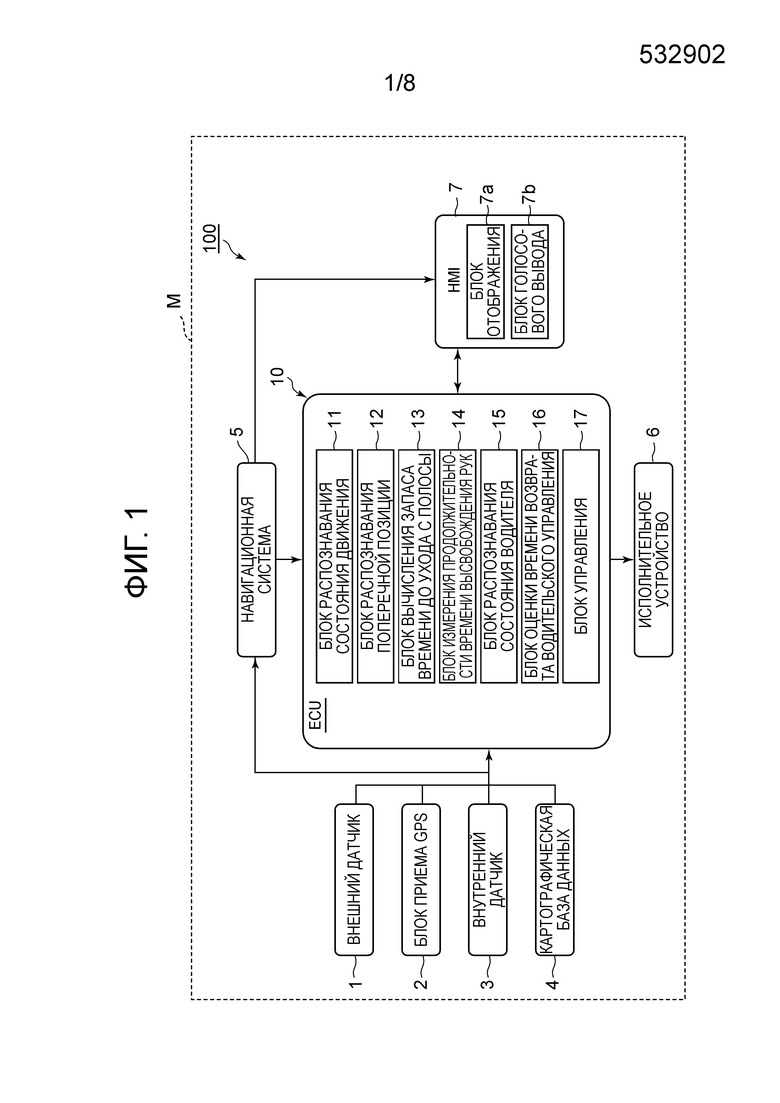
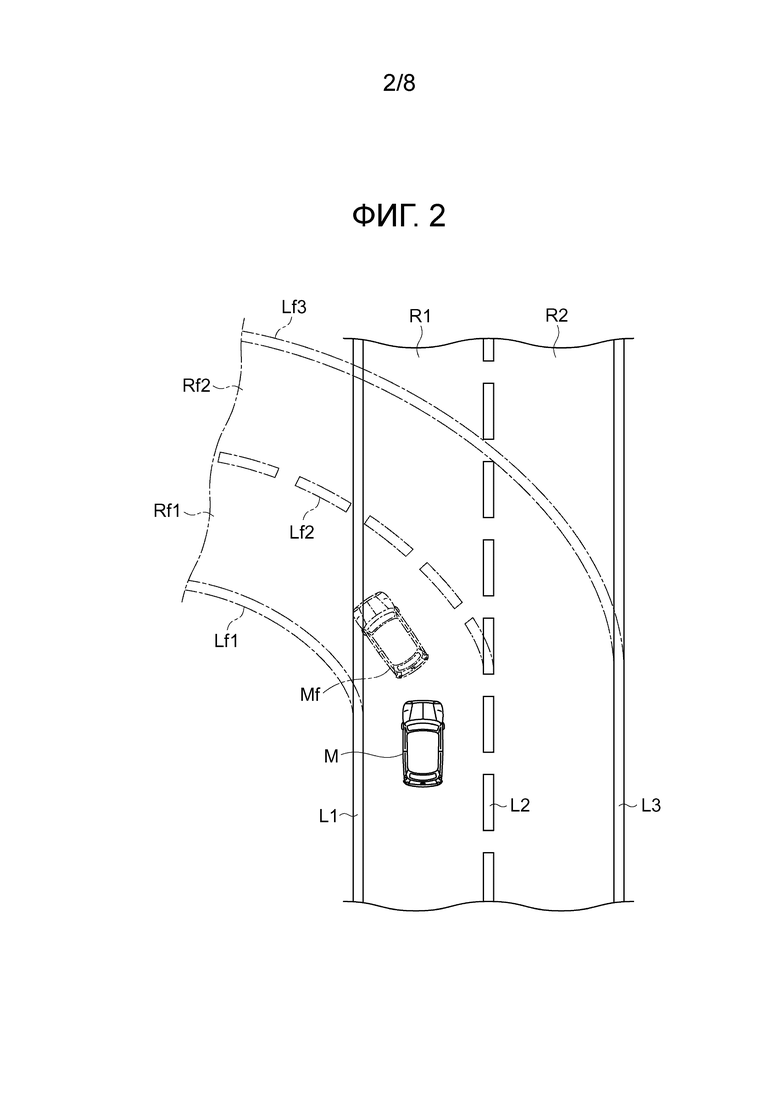
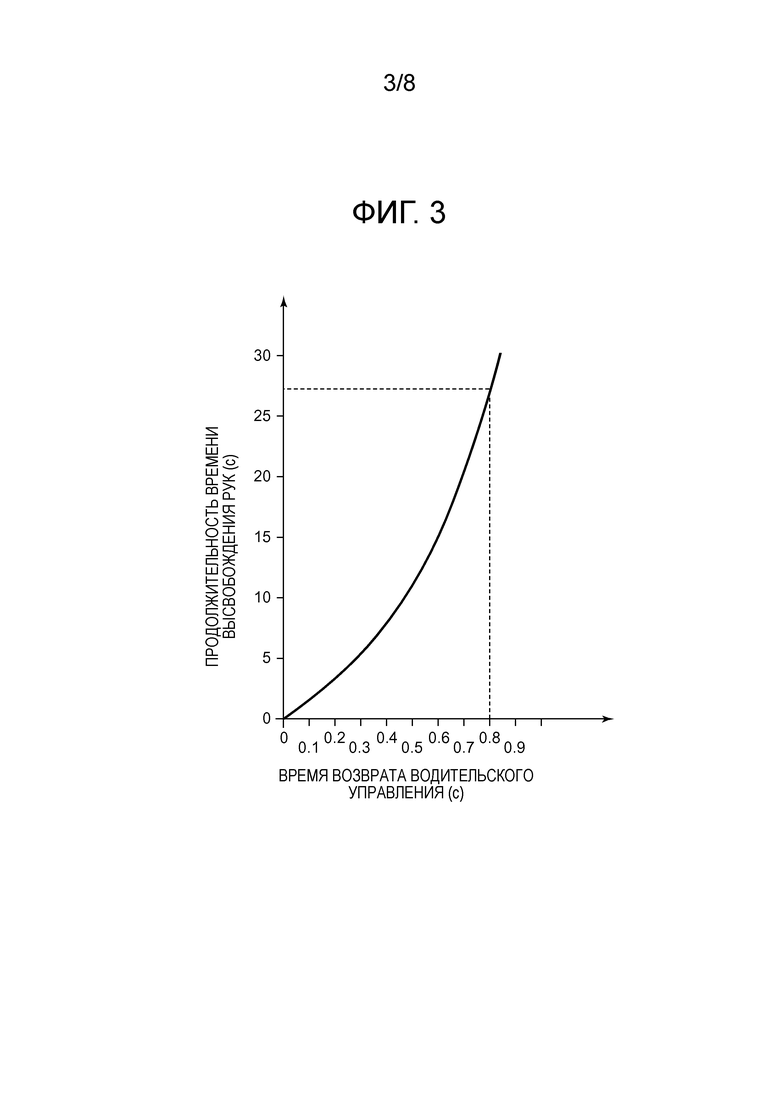
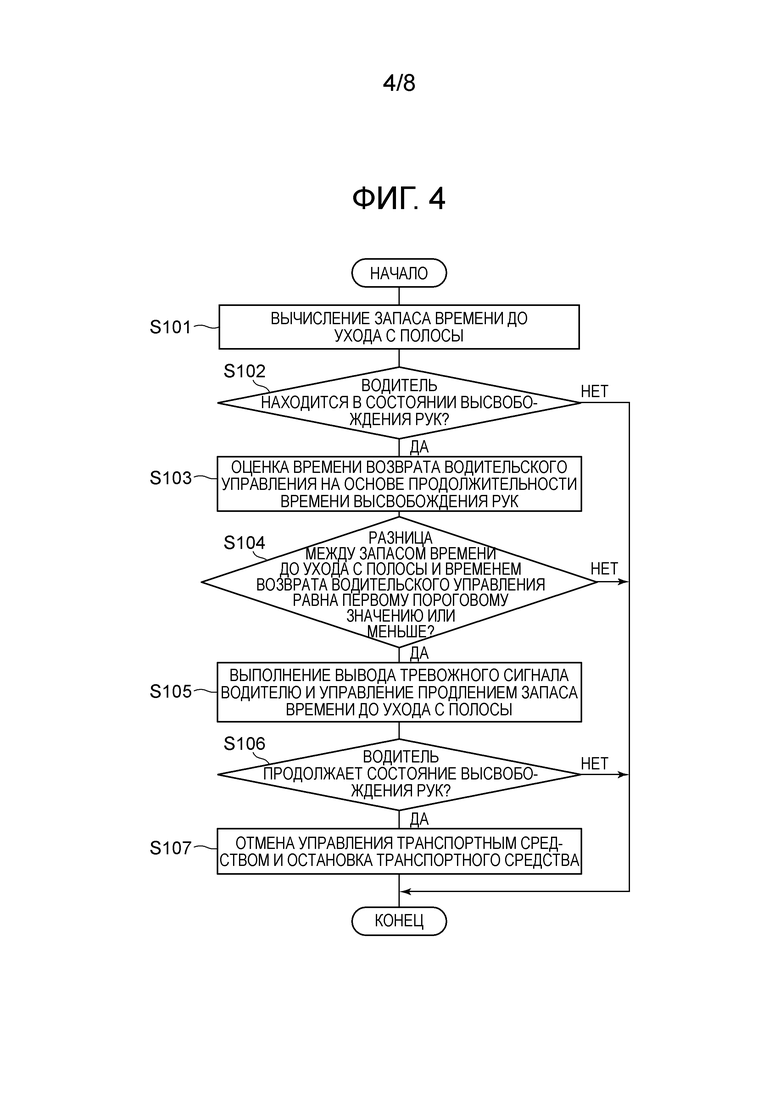
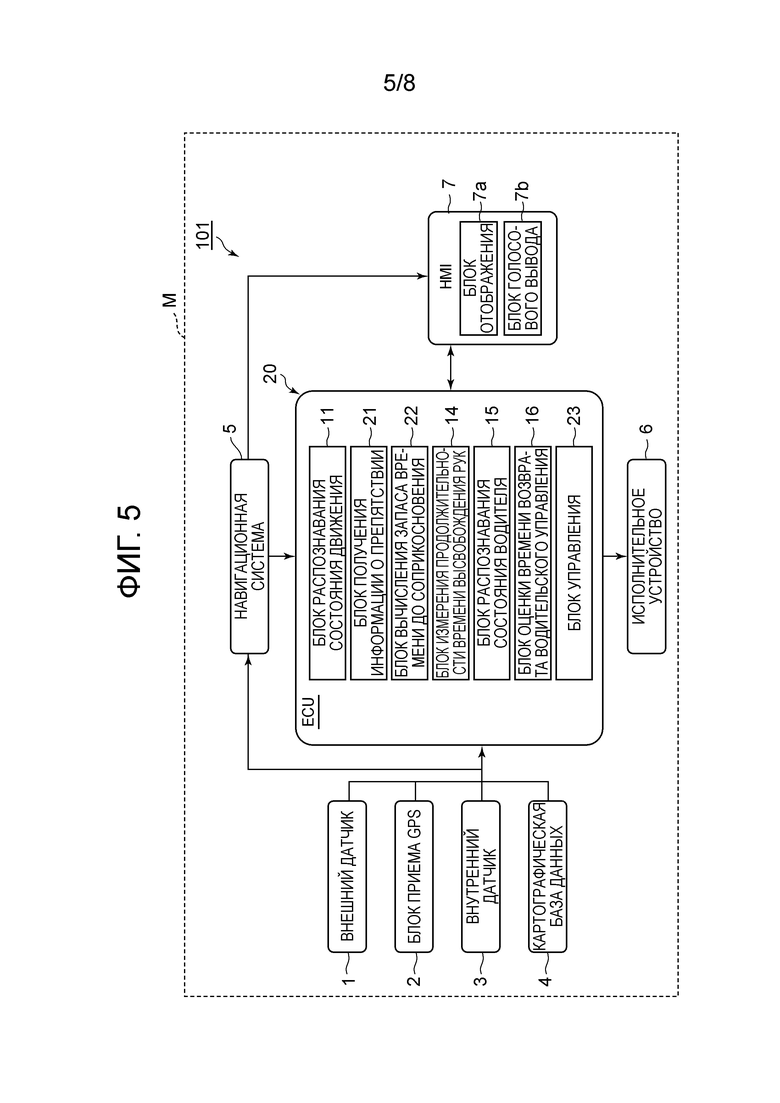
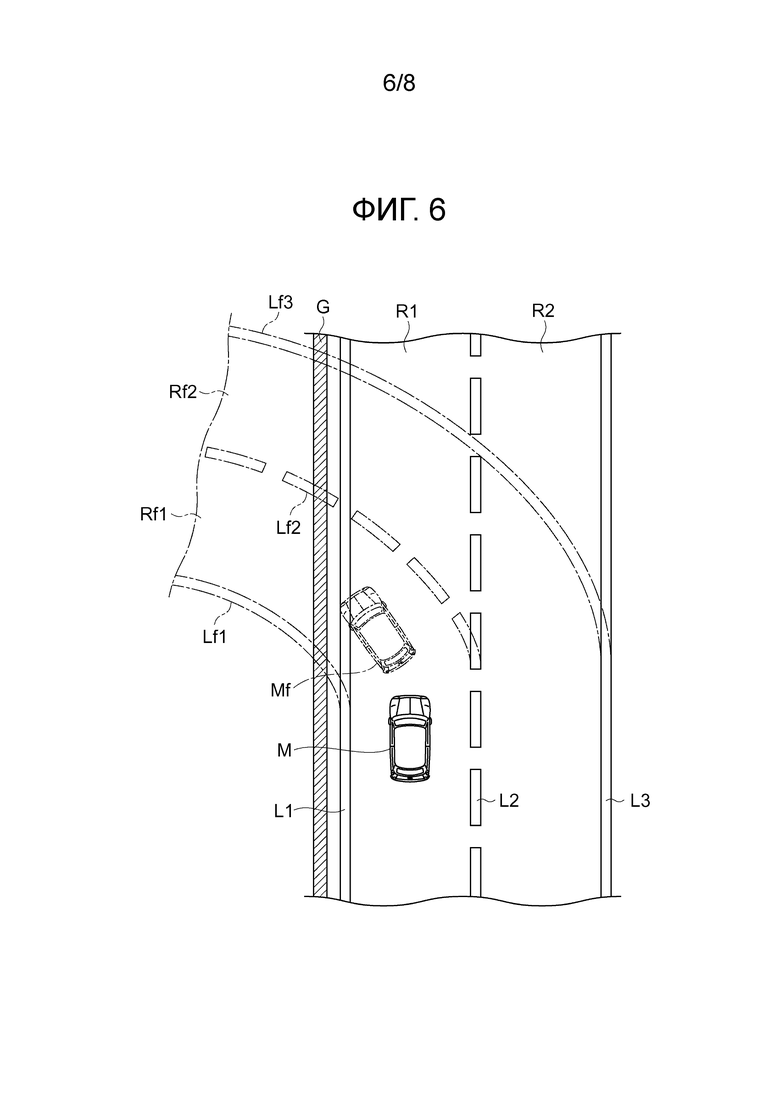
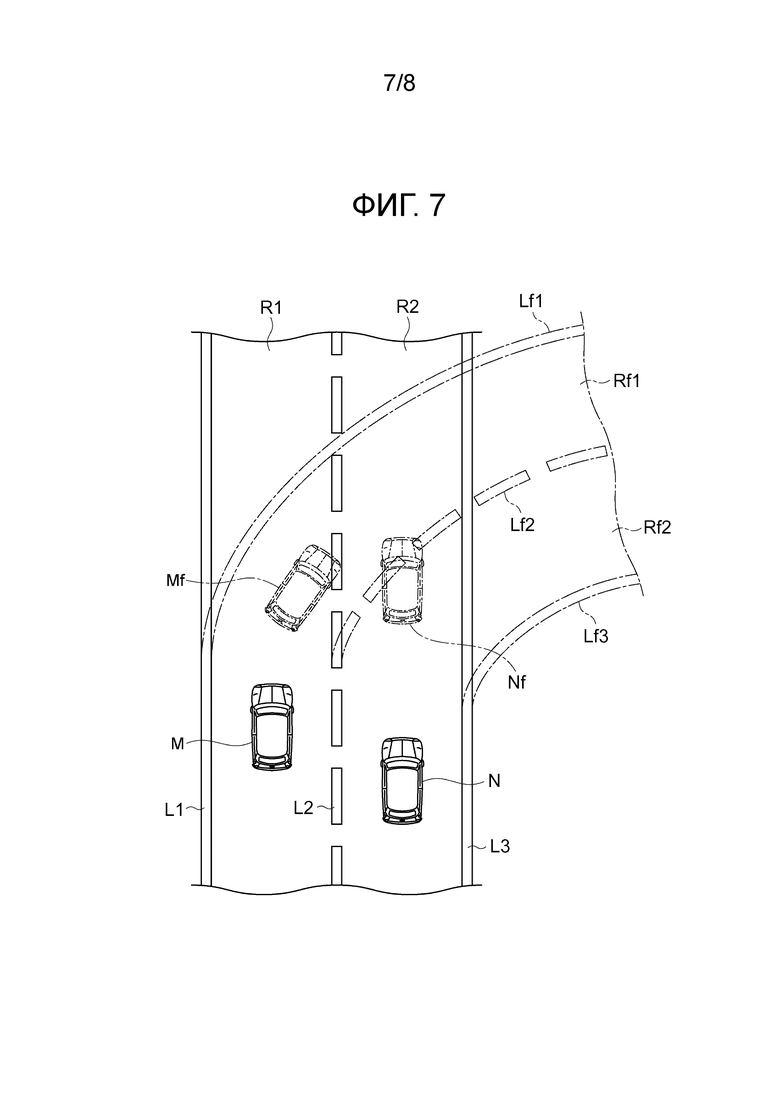
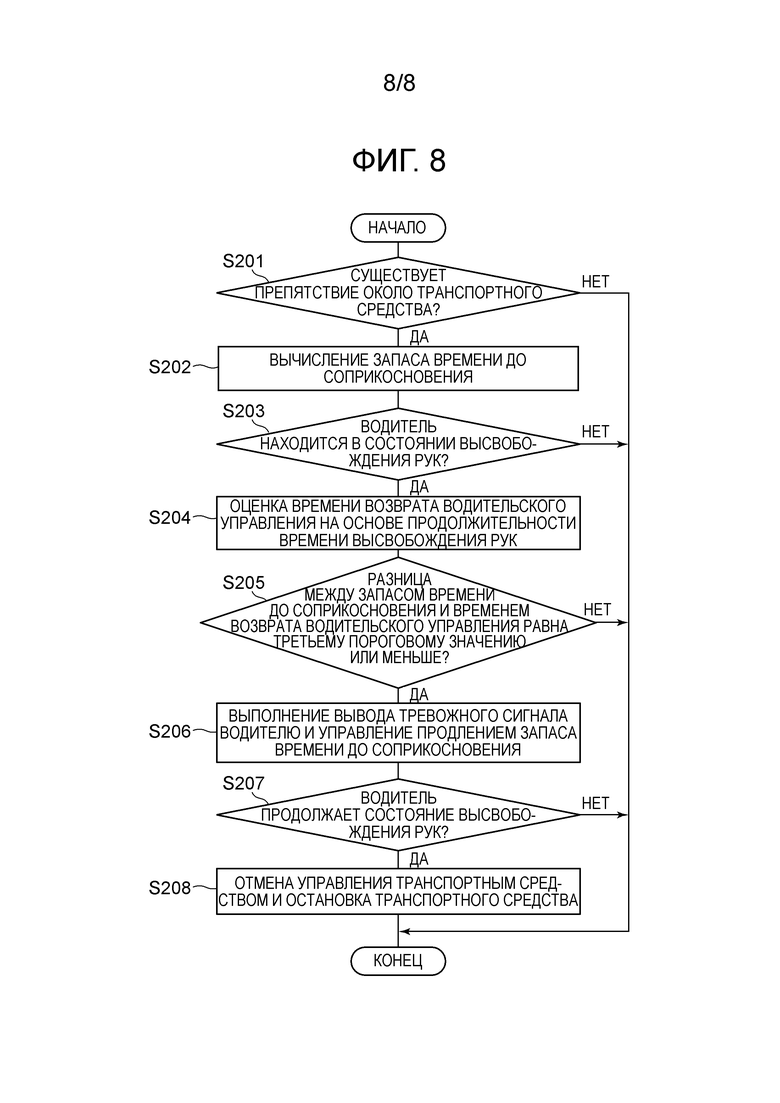
Изобретение представляет собой устройство управления транспортным средством, которое передает тревожную сигнализацию водителю. Устройство управляет транспортным средством так, что транспортное средство движется по полосе движения в диапазоне управления руления и диапазоне управления скоростью транспортного средства, которые заранее устанавливаются. Устройство управления транспортным средством определяет запас времени до ухода с полосы движения в заданных диапазонах и оценивает время возврата водительского управления на основе продолжительности времени высвобождения рук. Если разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше, то устройство выводит тревожный сигнал водителю. Обеспечивается своевременное предупреждение водителя о необходимости возвращения к операции водительского управления. 2 н. и 3 з.п. ф-лы, 8 ил.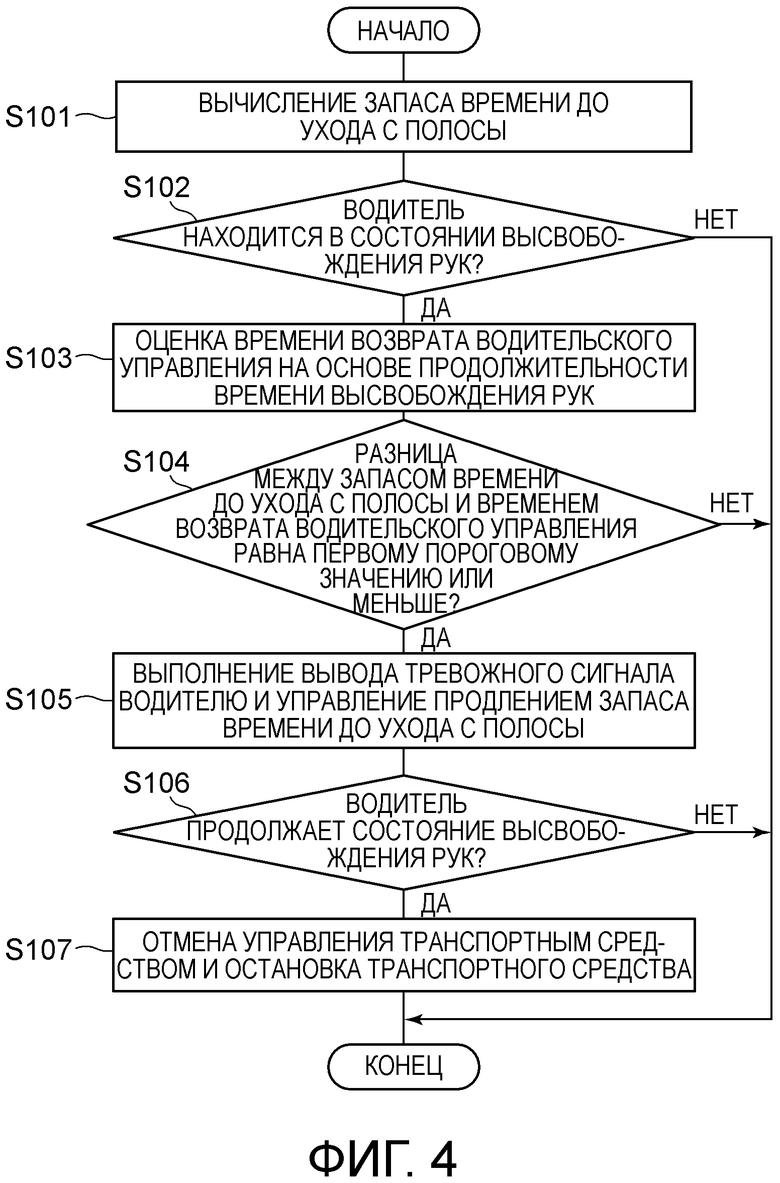
1. Устройство (100) управления транспортным средством, выполненное с возможностью управлять транспортным средством (M), так что транспортное средство движется по полосе движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, диапазон управления рулением и диапазон управления скоростью транспортного средства заранее устанавливаются, устройство управления транспортным средством характеризуется содержанием:
блока (11) распознавания состояния движения, выполненного с возможностью распознавать состояние движения транспортного средства;
блока (12) распознавания поперечной позиции, выполненного с возможностью распознавать поперечную позицию транспортного средства согласно полосе движения и ориентации транспортного средства относительно полосы движения;
блока (13) вычисления запаса времени до ухода с полосы, выполненного с возможностью вычислять запас времени до ухода с полосы на основе состояния движения транспортного средства, поперечной позиции транспортного средства относительно полосы движения и ориентации транспортного средства относительно полосы движения, запас времени до ухода с полосы является временем до того момента, когда транспортное средство отклоняется от полосы движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства;
блока (14) измерения продолжительности времени высвобождения рук, выполненного с возможностью измерять продолжительность времени высвобождения рук, продолжительность времени высвобождения рук является продолжительностью времени состояния высвобождения рук водителя транспортного средства;
блока (16) оценки времени возврата водительского управления, выполненного с возможностью оценивать время возврата водительского управления на основе продолжительности времени высвобождения рук, время возврата водительского управления является временем до того момента, когда водитель в состоянии высвобождения рук возвращается к операции водительского управления; и
блока (17) управления, выполненного с возможностью выводить тревожный сигнал водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна первому пороговому значению или меньше.
2. Устройство управления транспортным средством по п. 1, характеризующееся тем, что:
блок управления выполнен с возможностью, чтобы выполнять управление продлением запаса времени до ухода с полосы посредством по меньшей мере одного из замедления транспортного средства и ограничения диапазона управления рулением в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до ухода с полосы, равна второму пороговому значению или меньше.
3. Устройство управления транспортным средством по п. 1 или 2, характеризующееся тем, что:
устройство управления транспортным средством дополнительно содержит блок (15) распознавания состояния водителя, выполненный с возможностью распознавать, находится ли водитель в состоянии низкой активности, и
блок оценки времени возврата водительского управления выполнен с возможностью, чтобы оценивать, в случае, когда водитель распознается как находящийся в состоянии низкой активности посредством блока распознавания состояния водителя, что время возврата водительского управления должно быть более длительным, чем в случае, когда водитель распознается как находящийся не в состоянии низкой активности.
4. Устройство управления транспортным средством по п. 1 или 2, характеризующееся дополнительным содержанием:
блока (21) получения информации о препятствии, выполненного с возможностью получать информацию о препятствии, относящуюся к препятствию около транспортного средства; и
блока (22) вычисления запаса времени до соприкосновения, выполненного с возможностью вычислять запас времени до соприкосновения на основе состояния движения транспортного средства и информации о препятствии, запас времени до соприкосновения является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, при этом
блок управления выполнен с возможностью, чтобы выводить тревожный сигнал водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше.
5. Устройство управления транспортным средством, выполненное с возможностью управлять транспортным средством, так что транспортное средство движется по полосе движения в диапазоне управления рулением и диапазоне управления скоростью транспортного средства, диапазон управления рулением и диапазон управления скоростью транспортного средства заранее устанавливаются, устройство управления транспортным средством характеризуется содержанием:
блока распознавания состояния движения, выполненного с возможностью распознавать состояние движения транспортного средства;
блока получения информации о препятствии, выполненного с возможностью получать информацию о препятствии, относящуюся к препятствию около транспортного средства;
блока вычисления запаса времени до соприкосновения, выполненного с возможностью вычислять запас времени до соприкосновения, запас времени до соприкосновения является временем до того момента, когда транспортное средство приходит в соприкосновение с препятствием в диапазоне управления рулением и диапазоне управления скоростью транспортного средства;
блока измерения продолжительности времени высвобождения рук, выполненного с возможностью измерять продолжительность времени высвобождения рук, продолжительность времени высвобождения рук является продолжительностью времени состояния высвобождения рук водителя транспортного средства;
блока оценки времени возврата водительского управления, выполненного с возможностью оценивать время возврата водительского управления для водителя на основе продолжительности времени высвобождения рук; и
блока управления, выполненного с возможностью выводить тревожный сигнал водителю в случае, когда разница, получающаяся в результате вычитания времени возврата водительского управления из запаса времени до соприкосновения, равна третьему пороговому значению или меньше.
| JP 7025301 A, 27.01.1995 | |||
| JP 2012048642 A, 08.03.2012 | |||
| WO 2013116141 A1, 08.08.2013 | |||
| US 2014379164 A1, 25.12.2014 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |
| Машина для поверхностного свойлачивания слоя волокон | 1933 |
|
SU34758A1 |

