ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Варианты осуществления настоящего изобретения относятся к системе автономного вождения и транспортному средству автономного вождения. В частности, варианты осуществления настоящего изобретения относятся к системе автономного вождения, реализованной множеством транспортных средств автономного вождения, и транспортному средству автономного вождения, пригодному в качестве компонента системы.
УРОВЕНЬ ТЕХНИКИ
[0002] В международной публикации № WO 2007/102405 раскрыт способ определения пути транспортного средства, который можно использовать при самоопределении путей на транспортном средстве автономного вождения. Согласно этому способу, сначала прогнозируются пути транспортного средства, других транспортных средств и пр. Затем производится выбор множества предполагаемых путей с высокой безопасностью на основании вероятности помехи между транспортным средством и другими транспортными средствами и пр. Затем эффективности движения сравниваются для соответствующего множества кандидатов. Что касается эффективности движения, период времени и величина расхода топлива для прибытия в пункт назначения рассматриваются как элементы оценивания. Наконец, путь с самой высокой эффективностью движения среди предполагаемых путей с высокой безопасностью выбирается в качестве пути транспортного средства.
СПИСОК ИСТОЧНИКОВ ИНФОРМАЦИИ УРОВНЯ ТЕХНИКИ
[0003] Ниже приведен список патентных источников, на которые заявитель опирался как на уровень техники настоящего изобретения.
Патентный источник 1: международная публикация № WO 2007/102405
ПРОБЛЕМА, ПОДЛЕЖАЩАЯ РЕШЕНИЮ СОГЛАСНО ВАРИАНТАМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0004] Согласно способу определения пути, описанному в вышеупомянутой WO 2007/102405, в качестве пути транспортного средства можно выбирать путь, пригодный для безопасного прибытия в пункт назначения за короткое время. Следовательно, согласно способу, можно повысить удобство транспортного средства автономного вождения.
[0005] Однако, когда способ определения пути единообразно применяется на большом количестве транспортных средств автономного вождения, большое количество транспортных средств принимает одинаковое решение в одной и той же среде, что может легко приводить к неправильному распределению транспортного потока. В частности, возникает ситуация, в которой несколько транспортных средств автономного вождения одновременно хочет перестроиться между полосами в одном и том же месте, и, в результате, может возникать ситуация, в которой движение транспорта затруднено.
[0006] Варианты осуществления настоящего изобретения позволяют решить вышеописанную проблему, и их первой задачей является обеспечение системы автономного вождения, которая не приводит к локальному уплотнению транспортного потока, включающего в себя несколько транспортных средств автономного вождения, имеющих функции определения пути.
Кроме того, второй задачей вариантов осуществления настоящего изобретения является обеспечение транспортного средства автономного вождения, которое имеет функцию определения пути и не приводит к локальному уплотнению транспортного потока даже при автономном перемещении в транспортном потоке, где участвует несколько транспортных средств автономного вождения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007]
Для достижения вышеупомянутой цели, первый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения, включающую в себя множество транспортных средств автономного вождения,
в которой каждое из транспортных средств автономного вождения содержит
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области, и
устройства управления, установленные на отдельных транспортных средствах автономного вождения сконфигурированы таким образом, что происходит рассредоточение на стандартные полосы движения, которые множество транспортных средств автономного вождения определяет в одной и той же многополосной области, находящейся в одной и той же среде.
[0008] Второй аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно первому рассмотренному выше аспекту, где устройство управления выполняет
обработку генерации случайных чисел,
обработку считывания пороговых значений полос, и
обработку определения полосы определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
[0009] Третий аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно второму рассмотренному выше аспекту, где обработка определения полосы содержит
обработку определения временной полосы движения в многополосной области на основании информации, касающейся движения транспортного средства, и
обработку определения, задавать ли временную полосу движения как стандартную полосу движения, или задавать полосу, отличную от временной полосы движения, как стандартную полосу движения, на основании сравнения случайных чисел и пороговых значений полос.
[0010] Четвертый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно второму или третьему рассмотренному выше аспекту, где устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания пороговых значений полос в соответствии с целями распределения.
[0011] Пятый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно первому рассмотренному выше аспекту, где
устройство управления сохраняет характеристическое значение полосы и определяет стандартную полосу движения на основании характеристического значения полосы, и
характеристические значения полос, хранящиеся в соответствующем множестве транспортных средств автономного вождения, имеют рассредоточение.
[0012] Шестой аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно пятому рассмотренному выше аспекту, где устройство управления выполняет
обработку генерации случайных чисел,
обработку задания пороговых значений, состоящую в задании пороговых значений полос на основании характеристического значения полосы, и
обработку определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
[0013] Седьмой аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно шестому рассмотренному выше аспекту, где устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания такого соотношения между характеристическим значением полосы и пороговым значением полосы, которое позволяет реализовать цели распределения, когда характеристическое значение полосы рассредоточено по всему диапазону участка изменения, и
задание пороговых значений полос путем применения характеристического значения полосы собственного транспортного средства к соотношению, при обработке задания пороговых значений.
[0014] Восьмой аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно пятому рассмотренному выше аспекту, где устройство управления выполняет
обработку задания пороговых значений, состоящую в задании пороговых значений полос, которые совместно используются во множестве транспортных средств автономного вождения, и
обработку определения стандартной полосы движения на основании сравнения пороговых значений полос и характеристического значения полосы.
[0015] Девятый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно восьмому рассмотренному выше аспекту, где
устройство управления выполняет обработку задания целей распределения транспортных средств в многополосной области, и
обработка задания пороговых значений включает в себя обработку задания пороговых значений полос в соответствии с целями распределения.
[0016] Десятый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно рассмотренным выше аспектам с пятого по девятый, где устройство управления выполняет
обработку обнаружения характеристики, касающейся выбора полосы водителя транспортного средства, и
обработку отражения характеристики в характеристическом значении полосы.
[0017] Одиннадцатый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно любому из четвертого, седьмого и девятого рассмотренных выше аспектов, где устройство управления выполняет
обработку получения реального распределения транспортных средств в многополосной области, и
обработку коррекции пороговых значений полос, благодаря чему, реальное распределение транспортных средств приближается к целям распределения.
[0018] Двенадцатый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно любому из четвертого, седьмого, девятого и одиннадцатого рассмотренных выше аспектов, где устройство управления выполняет
обработку извлечения точки изменения, где цели распределения изменяются на маршруте к пункту назначения,
обработку задания одной секции в многополосной области, включающей в себя точку изменения, как области постепенного изменения, и
обработку постепенного изменения целей распределения в области постепенного изменения от распределения до изменения к распределению после изменения.
[0019] Тринадцатый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно любому из рассмотренных выше аспектов с первого по двенадцатый, где устройство управления выполняет
обработку обнаружения явления рекомендации не производить перестроение, в котором рекомендуется оставаться в полосе, и
обработку определения стандартной полосы движения в режиме, в котором множество транспортных средств автономного вождения, находящихся в одной и той же среде, вынуждены принимать одно и то же решение, когда обнаружено явление рекомендации не производить перестроение.
[0020] Четырнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения, имеющее функцию осуществления автономного движения к пункту назначения, содержащее:
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области,
причем устройство управления сконфигурировано таким образом, что происходит рассредоточение на стандартную полосу движения, которая определяется в одной и той же многополосной области, находящейся в одной и той же среде.
[0021] Пятнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно четырнадцатому рассмотренному выше аспекту, где устройство управления выполняет
обработку генерации случайных чисел,
обработку считывания пороговых значений полос, и
обработку определения полосы определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
[0022] Шестнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно пятнадцатому рассмотренному выше аспекту, где обработка определения полосы содержит
обработку определения временной полосы движения в многополосной области на основании информации, касающейся движения транспортного средства, и
обработку определения, задавать ли временную полосу движения как стандартную полосу движения, или задавать полосу, отличную от временной полосы движения, как стандартную полосу движения, на основании сравнения случайных чисел и пороговых значений полос.
[0023] Семнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно пятнадцатому или шестнадцатому рассмотренному выше аспекту, где устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания пороговых значений полос в соответствии с целями распределения.
[0024] Восемнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения, имеющее функцию осуществления автономного движения к пункту назначения, содержащее:
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области,
причем устройство управления сконфигурировано таким образом, что вероятность того, что каждая из отдельных полос будет определена как стандартная полоса движения в одной и той же многополосной области, находящейся в одной и той же среде, принимает фиксированное значение кроме 100% для каждой из полос.
[0025] Девятнадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно восемнадцатому рассмотренному выше аспекту, где устройство управления
сохраняет характеристическое значение полосы, и
выполняет
обработку генерации случайных чисел,
обработку задания пороговых значений, состоящую в задании пороговых значений полос на основании характеристического значения полосы, и
обработку определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
[0026] Двадцатый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно девятнадцатому рассмотренному выше аспекту, где устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания такого соотношения между характеристическим значением полосы и пороговыми значениями полос, которое позволяет реализовать цели распределения, когда характеристическое значение полосы рассредоточено по всему диапазону участка изменения, и
задает пороговые значения полос путем применения характеристического значения полосы транспортного средства к соотношению, при обработке задания пороговых значений.
[0027] Двадцать первый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно восемнадцатому рассмотренному выше аспекту, где устройство управления
сохраняет характеристическое значение полосы, и
выполняет
обработку задания пороговых значений, состоящую в задании пороговых значений полос, соответствующих соответствующим полосам многополосной области, и
обработку определения стандартной полосы движения на основании сравнения пороговых значений полос и характеристического значения полосы.
[0028] Двадцать второй аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно двадцать первому рассмотренному выше аспекту, где
устройство управления выполняет обработку задания целей распределения транспортных средств в многополосной области, и
обработка задания пороговых значений включает в себя обработку задания порогового значения полосы в соответствии с целями распределения.
[0029] Двадцать третий аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно любому из рассмотренных выше аспектов с девятнадцатого по двадцать второй, где устройство управления выполняет
обработку обнаружения характеристики, касающейся выбора полосы водителя собственного транспортного средства, и
обработку отражения характеристики в характеристическом значении полосы.
[0030] Двадцать четвертый аспект варианта осуществления настоящего изобретения предусматривает систему автономного вождения согласно любому из семнадцатого, двадцатого и двадцать второго рассмотренных выше аспектов, где устройство управления выполняет
обработку получения реального распределения транспортных средств в многополосной области, и
обработку коррекции пороговых значений полос, благодаря чему, реальное распределение транспортных средств приближается к целям распределения.
[0031] Двадцать пятый аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно любому из семнадцатого, двадцатого, двадцать второго и двадцать четвертого рассмотренных выше аспектов, где устройство управления выполняет
обработку извлечения точки изменения, где цели распределения изменяются на маршруте к пункту назначения,
обработку задания одной секции в многополосной области, включающей в себя точку изменения, как области постепенного изменения, и
обработку постепенного изменения целей распределения в области постепенного изменения от распределения до изменения к распределению после изменения.
[0032] Двадцать шестой аспект варианта осуществления настоящего изобретения предусматривает транспортное средство автономного вождения согласно любому из рассмотренных выше аспектов с четырнадцатого по двадцать пятый, где устройство управления выполняет
обработку обнаружения явления рекомендации не производить перестроение, в котором рекомендуется оставаться в полосе, и
обработку определения стандартной полосы движения в режиме, в котором одно и то же решение принимается в одной и той же среде, когда обнаружено явление рекомендации не производить перестроение.
ПРЕИМУЩЕСТВА ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0033] Согласно первому рассмотренному выше аспекту, транспортное средство автономного вождения выбирает стандартную полосу движения в многополосной области. Стандартные полосы движения, выбираемые отдельными транспортными средствами автономного вождения, имеют рассредоточение во всей системе. Следовательно, согласно данному аспекту, можно препятствовать сосредоточению стандартных полос движения на одной конкретной полосе.
[0034] Согласно второму рассмотренному выше аспекту, стандартные полосы движения отдельных транспортных средств автономного вождения распределяются на соответствующие полосы в многополосной области с вероятностями, соответствующими пороговым значениям полос. Когда отдельные транспортные средства автономного вождения определяют стандартные полосы движения таким образом, стандартные полосы движения рассредотачиваются на соответствующую одну из множества полос с вероятностями, соответствующими пороговым значениям полос, во всей системе.
[0035] Согласно третьему рассмотренному выше аспекту, стандартная полоса движения определяется как временная полоса движения или полоса, отличная от временной полосы движения, с вероятностями, соответствующими пороговым значениям полос. Когда отдельные транспортные средства автономного вождения определяют стандартные полосы движения таким образом, рассредоточение может происходить в стандартных полосах движения во всей системе.
[0036] Согласно четвертому рассмотренному выше аспекту, пороговые значения полос задаются в соответствии с целями распределения транспортных средств. При этом пороговые значения полос определяют вероятности рассредоточения стандартных полос движения на соответствующие полосы во всей системе. Следовательно, согласно данному аспекту, распределение стандартных полос движения может быть согласовано с целями распределения транспортных средств во всей системе.
[0037] В пятом рассмотренном выше аспекте, характеристические значения полос имеют рассредоточение во всей системе. Транспортным средствам автономного вождения, отличающимся характеристическими значениями полос, свойственно определять разные стандартные полосы движения. Следовательно, согласно данному аспекту, рассредоточение может происходить в стандартных полосах движения во всей системе.
[0038] Согласно шестому рассмотренному выше аспекту, транспортное средство автономного вождения определяет стандартную полосу движения путем сравнения пороговых значений полос со случайными числами. В этом случае, стандартные полосы движения, которые определяются на отдельных транспортных средствах автономного вождения, демонстрируют рассредоточение с вероятностями, соответствующими пороговым значениям полос. Кроме того, в данном аспекте, пороговые значения полос задаются на основании характеристических значений полос. Характеристическим значениям полос сообщается рассредоточение, и, таким образом, пороговые значения полос демонстрируют рассредоточение во всей системе. Следовательно, согласно данному аспекту, стандартные полосы движения могут рассредотачиваться по всей системе.
[0039] Согласно седьмому рассмотренному выше аспекту, задается соотношение между характеристическим значением полосы и пороговыми значениями полос. Согласно соотношению, цели распределения транспортных средств реализуются в случае, когда характеристические значения полос рассредотачиваются по всему диапазону участка изменения. Рассредоточение характеристических значений полос во всей системе имеет тенденцию к распространению на весь диапазон участка изменения с увеличением количества транспортных средств автономного вождения. Следовательно, согласно данному аспекту, распределение стандартных полос движения можно приближать к целям распределения с увеличением количества транспортных средств автономного вождения.
[0040] Согласно восьмому рассмотренному выше аспекту, стандартная полоса движения определяется на основании сравнения пороговых значений полос и характеристического значения полосы. В данном аспекте, пороговые значения полос одинаковы во всей системе, тогда как характеристическим значениям полос сообщается рассредоточение. Следовательно, согласно данному аспекту, стандартным полосам движения может сообщаться рассредоточение по всей системе.
[0041] Согласно девятому рассмотренному выше аспекту, пороговые значения полос, совместно используемые во всей системе, задаются в соответствии с целями распределения транспортных средств. Распределение стандартных полос движения во всей системе изменяется в соответствии с пороговыми значениями полос. Следовательно, когда пороговые значения полос задаются в соответствии с целью распределения, распределение стандартных полос движения может быть согласовано с целью распределения транспортных средств во всей системе.
[0042] Согласно десятому рассмотренному выше аспекту, характеристики, касающиеся выбора полосы водителей, отражаются в характеристических значениях полос. Стандартные полосы движения задаются в соответствии с характеристическими значениями полос. Следовательно, согласно данному аспекту, стандартные полосы движения, задаваемые во время автономного вождения, можно приводить в соответствие с характеристиками водителей.
[0043] Согласно одиннадцатому рассмотренному выше аспекту, пороговые значения полос можно корректировать, благодаря чему, реальное распределение транспортных средств приближается к целям распределения. На транспортном средстве автономного вождения, в котором пороговые значения полос скорректированы, определяется стандартная полоса движения, благодаря чему, реальное распределение транспортных средств приближается к целям распределения. Следовательно, согласно данному аспекту, реальное распределение транспортных средств можно приближать к целям распределения во всей системе.
[0044] Согласно двенадцатому рассмотренному выше аспекту, область постепенного изменения задается в секции, включающей в себя точку изменения целей распределения, и в области постепенного изменения, цели распределения могут постепенно изменяться. Если область постепенного изменения не задана, множество транспортных средств автономного вождения одновременно осуществляет перестроение между полосами до и после точки изменения. Согласно данному аспекту, можно избежать подобного сосредоточения перестроений между полосами.
[0045] Согласно тринадцатому рассмотренному выше аспекту, в ситуации, когда рекомендуется оставаться в полосе, стандартные полосы движения можно определять в режиме, который не приводит к рассредоточению. Во время движения транспортных средств, транспортные средства могут сталкиваться с ситуацией, когда не следует совершать перестроение в конкретную полосу, например, при прохождении транспортного средства экстренной службы и ограничений полос в связи со строительными работами. Согласно данному аспекту, в подобных ситуациях некоторым транспортным средствам автономного вождения можно препятствовать в осуществлении перестроения в ненадлежащую полосу.
[0046] Согласно четырнадцатому рассмотренному выше аспекту, транспортные средства автономного вождения выбирают стандартные полосы движения с рассредоточением в одной и той же многополосной области, находящейся в одной и той же среде. Когда несколько транспортных средств автономного вождения движется в одной и той же среде, отдельные транспортные средства выбирают стандартные полосы движения с рассредоточением, и, таким образом, транспортные средства не скапливаются на одной конкретной полосе. Следовательно, согласно данному аспекту, можно препятствовать возникновению дисбаланса транспортного потока.
[0047] Согласно пятнадцатому рассмотренному выше аспекту, стандартные полосы движения отдельных транспортных средств автономного вождения распределяются на соответствующие полосы многополосной области с вероятностями, соответствующими пороговым значениям полос. Когда отдельные транспортные средства автономного вождения определяют стандартные полосы движения таким образом, стандартные полосы движения рассредотачиваются на соответствующую одну из множества полос с вероятностями, соответствующими пороговым значениям полос, во всей системе, состоящей из множества транспортных средств автономного вождения.
[0048] Согласно шестнадцатому рассмотренному выше аспекту, временная полоса движения или полоса, отличная от временной полосы движения, определяется как стандартная полоса движения, с вероятностями, соответствующими пороговым значениям полос. Когда отдельные транспортные средства автономного вождения определяют стандартные полосы движения таким образом, стандартные полосы движения имеют рассредоточение во всей системе, включающей в себя несколько транспортных средств автономного вождения.
[0049] Согласно семнадцатому рассмотренному выше аспекту, пороговые значения полос задаются в соответствии с целями распределения транспортных средств. При этом пороговые значения полос определяют вероятности, с которыми стандартные полосы движения отдельных транспортных средств рассредотачиваются на соответствующие полосы, при наличии нескольких транспортных средств автономного вождения. Следовательно, согласно данному аспекту, в случае скопления нескольких транспортных средств автономного вождения, распределение стандартных полос движения может быть согласовано с целью распределения транспортных средств.
[0050] Согласно восемнадцатому рассмотренному выше аспекту, транспортные средства автономного вождения выбирают полосу движения или полосу обгона в качестве стандартных полос движения с соответствующими вероятностями в многополосной области. Поскольку индивидуальные характеристики, касающиеся выбора полосы транспортного средства автономного вождения, согласованы, водитель может легко принимать результат выбора. Кроме того, рассредоточение сообщается отдельным характеристикам отдельных транспортных средств автономного вождения, что позволяет препятствовать дисбалансу транспортного потока.
[0051] Согласно девятнадцатому рассмотренному выше аспекту, транспортное средство автономного вождения определяет стандартную полосу движения путем сравнения пороговых значений полос со случайными числами. В этом случае, стандартные полосы движения, которые определяются на отдельных транспортных средствах автономного вождения, демонстрируют рассредоточение с вероятностями, соответствующими пороговым значениям полос. Если стандартные полосы движения определяются таким образом на отдельных транспортных средствах автономного вождения, в случае скопления нескольких транспортных средств автономного вождения, стандартные полосы движения этих транспортных средств могут надлежащим образом рассредотачиваться. Кроме того, в данном аспекте, рассредоточение также может сообщаться пороговым значениям полос, если рассредоточение сообщается характеристическим значениям полос. Следовательно, согласно данному аспекту, можно детально рассредотачивать стандартные полосы движения, сообщая характеристические значения полос, имеющие рассредоточение, нескольким транспортным средствам автономного вождения.
[0052] Согласно двадцатому рассмотренному выше аспекту, характеристические значения полос, сообщаемые транспортным средствам автономного вождения, рассредотачиваются по всему диапазону участка изменения, что позволяет достигать целей распределения. Если отдельным транспортным средствам автономного вождения сообщаются разные характеристические значения полос, характеристические значения полос рассредотачиваются по всему диапазону участка изменения за счет скопления нескольких транспортных средств автономного вождения. Следовательно, согласно данному аспекту, отдельным транспортным средствам автономного вождения сообщаются разные характеристические значения полос, что позволяет реализовать цели распределения.
[0053] Согласно двадцать первому рассмотренному выше аспекту, стандартная полоса движения определяется на основании сравнения пороговых значений полос и характеристического значения полосы. Когда отдельным транспортным средствам автономного вождения сообщаются разные характеристические значения полос, происходит рассредоточение, соответствующее рассредоточению характеристических значений полос, на стандартные полосы движения, которые определяются на отдельных транспортных средствах. Следовательно, согласно данному аспекту, характеристические значения полос, имеющие рассредоточение, сообщаются нескольким транспортным средствам автономного вождения, что позволяет более детально рассредотачивать их стандартные полосы движения.
[0054] Согласно двадцать второму рассмотренному выше аспекту, пороговые значения полос, задаваемые для соответствующих полос многополосной области, задаются в соответствии с целями распределения транспортных средств. Распределение стандартных полос движения в случае скопления нескольких транспортных средств автономного вождения изменяется в соответствии с пороговыми значениями полос. Следовательно, если пороговые значения полос задаются в соответствии с целями распределения, стандартные полосы движения нескольких транспортных средств автономного вождения могут рассредотачиваться для согласования с целями распределения транспортных средств.
[0055] Согласно двадцать третьему рассмотренному выше аспекту, характеристика, касающаяся выбора полосы водителя, отражается в характеристическом значении полосы. Стандартная полоса движения задается в соответствии с характеристическим значением полосы. Следовательно, согласно данному аспекту, стандартную полосу движения, задаваемую во время автономного вождения, можно приводить в соответствие с характеристикой водителя.
[0056] Согласно двадцать четвертому рассмотренному выше аспекту, пороговые значения полос корректируются, благодаря чему, реальное распределение транспортных средств приближается к целям распределения. На транспортных средствах автономного вождения, в которых пороговые значения полос скорректированы, стандартные полосы движения определяются таким образом, что реальное распределение транспортных средств приближается к целям распределения. Следовательно, согласно данному аспекту, распределение транспортных средств, которое фактически реализуется несколькими транспортными средствами, можно приближать к целям распределения.
[0057] Согласно двадцать пятому рассмотренному выше аспекту, область постепенного изменения задается в секции, включающей в себя точку изменения целей распределения, и цели распределения могут постепенно изменяться в области постепенного изменения. Если область постепенного изменения не задана, несколько транспортных средств автономного вождения одновременно осуществляют перестроение между полосами до и после точки изменения. Согласно данному аспекту, можно избежать подобного сосредоточения перестроений между полосами.
[0058] Согласно двадцать шестому рассмотренному выше аспекту, в ситуации, когда рекомендуется оставаться в полосе, стандартные полосы движения можно определять в режиме, который не приводит к рассредоточению. Во время движения транспортных средств, транспортные средства могут сталкиваться с ситуацией, когда не следует совершать перестроение в конкретную полосу, например, при прохождении транспортного средства экстренной службы и ограничений полос в связи со строительными работами. Согласно данному аспекту, в подобной ситуации можно препятствовать некоторым транспортным средствам автономного вождения в осуществлении перестроения в ненадлежащую полосу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0059] Фиг. 1 - вид, демонстрирующий аппаратную конфигурацию транспортного средства автономного вождения согласно первому варианту осуществления настоящего изобретения;
фиг. 2 - схема, поясняющая процесс, в котором транспортное средство автономного вождения, представленное на фиг. 1, создает схему полос;
фиг. 3 - схема, поясняющая правило, согласно которому транспортное средство автономного вождения, представленное на фиг. 1, выбирает полосу движения;
фиг. 4 - блок-схема, демонстрирующая характеристическую часть транспортного средства автономного вождения, представленного на фиг. 1;
фиг. 5 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы, показанной на фиг. 4;
фиг. 6 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы во втором варианте осуществления настоящего изобретения;
фиг. 7 - блок-схема, демонстрирующая характеристическую часть третьего варианта осуществления настоящего изобретения;
фиг. 8 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в третьем варианте осуществления настоящего изобретения;
фиг. 9 - блок-схема, демонстрирующая характеристическую часть четвертого варианта осуществления настоящего изобретения;
фиг. 10 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в четвертом варианте осуществления настоящего изобретения;
фиг. 11 - блок-схема, демонстрирующая характеристическую часть пятого варианта осуществления настоящего изобретения;
фиг. 12 иллюстрирует пример графика, демонстрирующего соотношение между характеристическим значением полосы и пороговым значением полосы, используемое в пятом варианте осуществления настоящего изобретения;
фиг. 13 - график, поясняющий возможности распределения в трех областях, разделенных пороговыми значениями полос thr1 и thr2, показанными на фиг. 12;
фиг. 14 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в пятом варианте осуществления настоящего изобретения;
фиг. 15 иллюстрирует пример графика, используемого в блок-схеме последовательности операций, показанной на фиг. 14;
фиг. 16 - блок-схема, демонстрирующая характеристическую часть шестого варианта осуществления настоящего изобретения;
фиг. 17 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в шестом варианте осуществления настоящего изобретения;
фиг. 18 - блок-схема последовательности операций, поясняющая первую модификацию обработки, выполняемой секцией выбора полосы в шестом варианте осуществления настоящего изобретения;
фиг. 19 - блок-схема последовательности операций, поясняющая вторую модификацию обработки, выполняемой секцией выбора полосы в шестом варианте осуществления настоящего изобретения;
фиг. 20 - блок-схема, демонстрирующая характеристическую часть седьмого варианта осуществления настоящего изобретения;
фиг. 21 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в седьмом варианте осуществления настоящего изобретения;
фиг. 22 - блок-схема, демонстрирующая характеристическую часть восьмого варианта осуществления настоящего изобретения;
фиг. 23 схематически демонстрирует, что цели распределения постепенно изменяются в области постепенного изменения в восьмом варианте осуществления настоящего изобретения;
фиг. 24 - блок-схема, демонстрирующая характеристическую часть девятого варианта осуществления настоящего изобретения;
фиг. 25 - схема, поясняющая пример явления рекомендации не производить перестроение из полосы, в которой рекомендуется оставаться транспортному средству автономного вождения, в девятом варианте осуществления настоящего изобретения; и
фиг. 26 - блок-схема последовательности операций, поясняющая обработку, выполняемую секцией выбора полосы в девятом варианте осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0060] Первый вариант осуществления
Аппаратная конфигурация первого варианта осуществления
На фиг. 1 показан вид, демонстрирующий аппаратную конфигурацию транспортного средства 10 автономного вождения согласно первому варианту осуществления настоящего изобретения. Как показано на фиг. 1, транспортное средство 10 снабжено стерео-камерой 12. Стерео-камера 12 может захватывать стереоизображение участка перед транспортным средством 10 под заранее определенным углом наблюдения. Заметим, что стерео-камеру 12 можно заменить моноскопической камерой.
[0061] На транспортном средстве 10 установлено множество блоков 14 LIDAR (Laser Imaging Detection and Ranging) таким образом, чтобы окружать транспортное средство. В частности, установлено всего шесть блоков 14 LIDAR, чтобы обследовать участок перед транспортным средством, участки слева и справа перед транспортным средством, участок позади транспортного средства и участки слева и справа позади транспортного средства. С помощью блоков 14 LIDAR можно обнаруживать контуры объектов, которые присутствуют в соответствующих участках обнаружения, и расстояния до объектов.
[0062] На транспортном средстве 10 установлено множество блоков 16 радаров миллиметрового диапазона таким образом, чтобы окружать транспортное средство. Всего установлено пять блоков 16 радаров миллиметрового диапазона, чтобы обследовать участок перед транспортным средством, участки слева и справа перед транспортным средством и участки слева и справа позади транспортного средства. С помощью блоков 16 радаров миллиметрового диапазона можно обнаруживать расстояния до объектов, которые присутствуют в соответствующих участках обнаружения, а также относительные скорости объектов и транспортного средства 10.
[0063] В дальнейшем вышеописанные стерео-камера 12, блоки 14 LIDAR и блоки 16 радаров миллиметрового диапазона будут в целом именоваться "датчиком распознавания объектов".
[0064] Транспортное средство 10 снабжено блоком 18 GPS (глобальной системы позиционирования). С помощью блока 18 GPS можно обнаруживать текущее местоположение транспортного средства 10 с использованием GPS.
[0065] Транспортное средство 10 снабжено ECU (электронным блоком управления) 20. Сигналы обнаружения от вышеописанных "датчиков распознавания объектов" и блока 18 GPS поступают на ECU 20. На основании этих сигналов ECU 20 может обнаруживать дорожную конструкцию, например, ограждение, другие транспортные средства, присутствующие вокруг, и пр. (в дальнейшем именуемые "окружающими объектами"). Хотя ECU 20 может быть физически разделен на несколько блоков согласно функциям, в этом описании изобретения эти блоки, в целом, именуются ECU 20.
[0066] схема полос на транспортном средство автономного вождения
На фиг. 2 показана схема, поясняющая процесс, в котором транспортное средство 10 автономного вождения, представленное на фиг. 1, создает схему полос. В настоящем варианте осуществления, в ECU 20 установлена функция навигации. Функция навигации позволяет находить маршрут от текущего местоположения транспортного средства 10 до указанного пункта назначения.
[0067] В ECU 20 также хранятся картографические данные. Картографические данные включают в себя информацию о положении пункта назначения, структуре соединения полос на маршруте, атрибутах полос и дорожной разметке, ограничении скорости и пр. Серая область 22, проиллюстрированная в верхнем ряду на фиг. 2, представляет собой группу точек, присутствующих на маршруте, найденном функцией навигации, из которых можно физически достичь пункта назначения.
[0068] В процессе перемещения из текущего местоположения в пункт назначения транспортному средству 10 может потребоваться перестроение между полосами. Секция 24 со стрелкой, проиллюстрированная в среднем ряду на фиг. 2, демонстрирует расстояние (включая границу), необходимое для перестроения между полосами. Кроме того, белый треугольник 26, представленный на фиг. 2, демонстрирует положение, в котором транспортное средство 10 должно завершить перестроение между полосами. ECU 20 устраняет секцию 24 со стрелкой из серой области 22 в верхнем ряду на фиг. 2 для вычисления серой области 28 в среднем ряду на фиг. 2, которая является всей областью, где может двигаться транспортное средство 10 автономного вождения. Далее область будет именоваться "проезжей областью". Проезжая область 28 это область, где транспортное средство 10 может фактически двигаться в процессе перемещения в пункт назначения из текущего местоположения.
[0069] В проезжей области 28 существует область 30, в которой присутствуют множество полос, где разрешено движение транспортного средства. В дальнейшем область 30 именуется "многополосной областью". В ECU 20 хранится правило выбора полосы в многополосной области 30.
[0070] Нижний ряд на фиг. 2 иллюстрирует пример схемы 32 полос, которую ECU 20 создает в проезжей области 28 в соответствии с вышеописанным правилом. Когда схема 32 полос создана, транспортное средство 10, в основном, перемещается в соответствии со схемой 32, и когда возникает необходимость в обгоне и т.п., транспортное средство 10 надлежащим образом корректирует схему 32 полос движется в пункт назначения.
[0071] На фиг. 3 показана схема, поясняющая правило, которому следует ECU 20 при выборе полосы движения. Для транспортного средства 10 задается стандартная полоса движения. Например, на дороге с левосторонним движением, левая полоса задается как стандартная полоса движения. Кроме того, на дороге с левосторонним движением, где присутствуют множество полос, в общем случае, левая полоса задается как полоса движения, и правая полоса задается как полоса обгона. На подобной дороге полоса движения слева задается как стандартная полоса движения.
[0072] Фиг. 3 демонстрирует состояние, в котором транспортное средство 10 движется по левой полосе, которая, в основном, является стандартной полосой движения. Однако, когда предшествующее транспортное средство с низкой скоростью присутствует на полосе движения, можно определить выполнение обгона. В этом случае, ECU 20 выбирает полосу обгона только во время обгона. Кроме того, ответвление дороги, ведущее в пункт назначения, может быть обеспечено со стороны полосы обгона. В таком случае, ECU 20 также отказывается от стандартной полосы движения и выбирает полосу обгона.
[0073] В ситуации, когда по дороге движется одно-единственное транспортное средство 10 автономного вождения, не возникает проблем в результате выбора транспортным средством 10 полосы в соответствии с вышеописанным правилом. Если же несколько транспортных средств 10 автономного вождения выбирает одну и ту же полосу в соответствии с одним и тем же правилом, перестроение между полосами одновременно осуществляется в конкретном месте, и плавность транспортного потока может нарушаться. Поэтому, в настоящем варианте осуществления, в "многополосной области", где присутствует множество проезжих полос, ECU 20 вынуждены выбирать полосы таким образом, чтобы происходило рассредоточение на стандартные полосы движения.
[0074] Особенность первого варианта осуществления
На фиг. 4 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Согласно фиг. 4, секция 34 распознавания окружающих объектов реализована посредством ECU 20, осуществляющего обработку распознавания окружающих объектов. В обработке распознавания объектов, "окружающие объекты", например, другие транспортные средства, присутствующие вокруг, распознаются на основании результата обнаружения "датчиков распознавания объектов", например, стереофонических видеорегистраторов 12.
[0075] Секция 36 распознавания проезжей дороги реализована посредством ECU 20, выполняющего обработку распознавания проезжей дороги. При обработке распознавания проезжей дороги, проезжая дорога транспортного средства 10 автономного вождения распознается на основании картографической информации, информации GPS, информации о распознаваемой дорожной разметке и пр. В частности, определяется текущее местоположение транспортного средства 10 и, дополнительно, различные распознаются ситуации маршрута из текущего местоположения в пункт назначения. Результат обработки секции 34 распознавания окружающих объектов и результат обработки секции 36 распознавания проезжей дороги поступают на секцию 38 выбора полосы.
[0076] Секция 38 выбора полосы реализована посредством ECU 20, выполняющего обработку выбора полосы. При обработке выбора полосы, полоса движения транспортного средства 10 определяется на основании окружающих объектов и распознаваемых ситуаций проезжей дороги. После осуществления обработки выбора полосы, в ECU 20, разрешение задается в соответствии с типом дороги (автострада, обычная дорога и пр.) и пр. Например, задаются разрешение, например 1 м, для положений других транспортных средств, и например 5 км/ч для скоростей других транспортных средств. ECU 20 одной и той же модели осуществляют одну и ту же обработку в отношении одних и тех же вводов согласно разрешению. ECU 20 настоящего варианта осуществления отличается тем, что вызывает рассредоточение на стандартные полосы движения в многополосной области при подобном условии. Обработка, обуславливающая эту особенность, будет подробно описана ниже со ссылкой на фиг. 5.
[0077] Результат обработки секции 38 выбора полосы поступает на секцию LC 40 траектории (перестроения между полосами). Кроме того, результат обработки секции 40 траектории LC поступает на секцию 42 управления движением. В секции 40 траектории LC, траектория (положение в каждый момент времени) транспортного средства 10 автономного вождения вычисляется на основании полосы движения, выбранной секцией 38 выбора полосы. Кроме того, в секции 42 управления движением, различные приводы, связанные с рулением, вождением, торможением и пр., управляются для реализации вычисленной траектории.
[0078] На фиг. 5 показана блок-схема последовательности операций, поясняющая характеристическую часть обработки определения полосы движения, которая выполняется ECU 20 в части обработки выбора полосы в настоящем варианте осуществления. Процедура, представленная на фиг. 5, запускается ECU 20, распознающим "инструкцию повторного выбора полосы" (этап 44). При этом ECU 20 распознает инструкцию повторного выбора полосы, например в следующем порядке.
(1) Перемещение на фиксированное расстояние от предыдущего выбора полосы
(2) Истечение фиксированного периода времени после предыдущего выбора полосы
(3) Увеличение или уменьшение количества полос на проезжей дороге
[0079] Когда ECU 20 распознает инструкцию повторного выбора полосы, производится определение, находится ли данная проезжая дорога в многополосной области (этап 46).
[0080] Когда определено, что данная проезжая дорога не находится в многополосной области, можно определить, что отсутствует место для выбора полосы. В этом случае, данная полоса непрерывно выбирается как полоса движения (этап 48). В дальнейшем, процедура этого времени сразу же заканчивается.
[0081] Когда определено, что данная проезжая дорога является многополосной областью, сначала генерируется случайное число в виде действительного числа от нуля до 1 (этап 50).
[0082] ECU 20 сохраняет столько же пороговых значений полос thri (i=1 … n), сколько (n) полос присутствует на дороге. Например, для дороги с двумя полосами, сохраняется два пороговых значения полос thr1 и thr2. Кроме того, для дороги с тремя полосами, сохраняется три пороговых значения полос thr1, thr2 и thr3. Эти пороговые значения полос thri используются для определения, какая из множества полос задается как стандартная полоса движения. В любом случае, пороговое значение полосы thri задается в диапазоне от 0 до 1. Кроме того, n-ое пороговое значение полосы thrn задается как 1,0.
[0083] Заметим, что в настоящем варианте осуществления, диапазон случайных чисел составляет от нуля до единицы, и диапазон совпадает с диапазоном изменения порогового значения полосы thri. Если только диапазон случайных чисел и диапазон пороговых значений полос thri совпадает друг с другом, диапазон не ограничивается вышеописанным диапазоном.
[0084] Настоящий вариант осуществления базируется на предварительном условии левостороннего движения. Таким образом, настоящий вариант осуществления базируется на предварительном условии, что полоса движения присутствует на левой стороне в многополосной области, и полоса обгона присутствует на правой стороне. Пороговое значение полосы thr1 задается как пороговое значение для определения, задавать ли самую левую полосу как стандартную полосу движения. Кроме того, пороговое значение полосы thrn задается как пороговое значение для определения, задавать ли n-ую слева полосу как стандартную полосу движения.
[0085] Когда обработка на вышеописанном этапе 50 заканчивается в процедуре, представленной на фиг. 5, производится определение, меньше ли сгенерированное случайное число, чем первое пороговое значение полосы thr1 (этап 52). Когда определено, что случайное число меньше, чем пороговое значение полосы thr1, самая левая полоса многополосной области выбирается в качестве стандартной полосы движения (этап 54).
[0086] Например, на автостраде с двумя полосами или тремя полосами, пороговое значение полосы thr1 задается равным 0,6. В этом случае, вероятность того, что случайные числа падают ниже thr1, равно 60%. Соответственно, транспортное средство 10 автономного вождения выбирает самую левую полосу (полосу движения) с вероятностью 60%. Когда каждое из множества транспортных средств 10 автономного вождения выбирает самую левую полосу как стандартную полосу движения с вероятностью 60%, 60% транспортных средств движется на самой левой полосе из трех полос.
[0087] Когда условие вышеописанного этапа 52 не выполняется, производится определение, меньше ли случайное число, чем пороговое значение полосы thr2 (этап 56). Когда распознается, что вышеописанное условие выполняется, вторая слева полоса выбирается в качестве стандартной полосы движения (этап 58).
[0088] Когда многополосная область является двухполосной дорогой, вторая слева является n-ой. В этом случае, пороговое значение полосы thr2 задается как 1,0, и, таким образом, условие на этапе 56 выполняется, какое значение может иметь случайное число. В этом случае, процедура этого цикла заканчивается в момент времени, когда заканчивается обработка на вышеописанном этапе 58. Когда проезжая дорога является автострадой с двумя полосами, транспортное средство 10 автономного вождения выбирает вторую полосу слева как стандартную полосу движения с вероятностью 40%. В результате, в ситуации, в которой движется несколько транспортных средств автономного вождения, 60% транспортных средств назначается самой левой полосе, и 40% транспортных средств назначается второй полосе.
[0089] Когда многополосная область является дорогой с тремя или более полосами, thr2 может задаваться как значение, меньшее 1,0. При таком задании, может возникать ситуация, когда определяется, что условие на вышеописанном этапе 56 не выполняется. В этом случае, стандартная полоса движения определяется на основании сравнения случайного числа и порогового значения полосы thr3 и следующих пороговых значений полос thri (см. этап 60).
[0090] Как описано выше, транспортное средство 10 автономного вождения настоящего варианта осуществления выбирает разные полосы в качестве стандартной полосы движения с вероятностями, соответствующими пороговым значениям полос thri для одного и того же ввода в многополосной области. Таким образом, транспортное средство 10 автономного вождения настоящего варианта осуществления определяет стандартную полосу движения с рассредоточением, когда в многополосной области сообщается одна и та же среда.
[0091] Когда отдельные транспортные средства 10 автономного вождения определяют стандартные полосы движения с рассредоточением, происходит рассредоточение на полосы, по которым движутся транспортные средства 10, в транспортной системе, включающей в себя множество транспортных средств 10 автономного вождения. Следовательно, согласно настоящему варианту осуществления, можно эффективно предотвращать возникновение локального уплотнения транспортного потока, куда входит несколько транспортных средств 10 автономного вождения в транспортной системе.
[0092] Второй вариант осуществления
Далее, второй вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 6. Транспортное средство 10 автономного вождения настоящего варианта осуществления имеет такую же аппаратную конфигурацию, как в случае первого варианта осуществления. Настоящий вариант осуществления можно реализовать посредством выполнения ECU 20 процедуры, представленной на фиг. 6, вместо процедуры, представленной на вышеописанной фиг. 5, в качестве обработки определения полосы движения.
[0093] ECU 20 запускает процедуру, представленную на фиг. 6, путем распознавания инструкции повторного выбора полосы, как в случае процедуры, представленной на фиг. 5 (этап 44). Далее, на фиг. 6, этапы, идентичные или соответствующие этапам, представленным на фиг. 5, обозначаются одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0094] Когда начинается процедура, представленная на фиг. 6, сначала временно определяется полоса движения (этап 62). В данном случае, полоса движения временно определяется на основании результата распознавания окружающих объектов и результата распознавания проезжей дороги, без учета формирования рассредоточения. Соответственно, на транспортных средствах 10 автономного вождения, находящихся в одной и той же среде, одна и та же полоса временно определяется как полоса движения. Далее, полоса будет именоваться "временной полосой движения".
[0095] Затем, на этапе 46, производится определение, соответствует ли данная проезжая дорога многополосной области. Когда вышеописанное определение дает отрицательный результат, отсутствует место для выбора полосы, поэтому временная полоса движения непосредственно выбирается как полоса движения (этап 64).
[0096] Когда определено, что данная проезжая дорога соответствует многополосной области, обработка последовательно осуществляется на этапах 50 и 52. Как в случае первого варианта осуществления, задается n пороговых значений полос thri, количество которых равно количеству n полос проезжей дороги. Кроме того, n-ое пороговое значение полосы thrn задается как 1,0. Однако, в настоящем варианте осуществления, первое пороговое значение полосы thr1 используется для определения, принимать ли временную полосу движения. Следовательно, когда определено, что случайные числа меньше порогового значения полосы thr1 на этапе 52, временная полоса движения выбирается в качестве стандартной полосы движения (этап 66).
[0097] В настоящем варианте осуществления, второе пороговое значение полосы thr2 используется для определения, принимать ли "первую слева полосу за исключением временной полосы движения". Кроме того, третье пороговое значение полосы thr3 используется для определения, принимать ли "вторую слева полосу за исключением временной полосы движения". То же самое справедливо для порогового значения полосы thr4 и следующих пороговых значений полос. Стандартная полоса движения определяется надлежащим образом на основании этих пороговых значений полос, когда вышеописанное условие на этапе 52 не выполняется (см. этапы 68 и 70).
[0098] Как описано выше, транспортное средство 10 автономного вождения настоящего варианта осуществления сначала определяет временную полосу движения, соответствующую окружающим объектам и ситуации проезжей дороги. Затем, хотя временная полоса движения задается в качестве предварительного условия, стандартная полоса движения определяется таким образом, что происходит рассредоточение. Первый вариант осуществления демонстрирует пример, в котором первое пороговое значение полосы thr1 задается как 0,6. В настоящем варианте осуществления, первое пороговое значение полосы thr1 также желательно устанавливать превышающим 0,5. Согласно подобного заданию, временная полоса движения выбирается в качестве стандартной полосы движения с вероятностью, превышающей 50%. Временная полоса движения определяется в соответствии с окружающими объектами и фактической ситуацией проезжей дороги и является наиболее подходящей полосой для транспортного средства 10 автономного вождения при условии, что формирование рассредоточения не принимается в рассмотрение. Согласно настоящему варианту осуществления, можно препятствовать локальному уплотнению транспортного потока, как в случае первого варианта осуществления, при том, что вероятность выбора наиболее подходящей полосы наподобие этой в качестве стандартной полосы движения составляет 50% или более.
[0099] Третий вариант осуществления
Далее, третий вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 7 и 8. Транспортное средство 10 автономного вождения настоящего варианта осуществления имеет такую же аппаратную конфигурацию, как в случае первого варианта осуществления. Настоящий вариант осуществления отличается тем, что транспортное средство 10 автономного вождения определяет цель распределения транспортных средств в соответствии с проезжей дорогой и дает рассредоточение на стандартную полосу движения, благодаря чему, достигается цель распределения.
[0100] На фиг. 7 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Далее, на фиг. 7, элементы, идентичные или соответствующие элементам, представленным на фиг. 4, будут обозначены одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0101] В настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 74 определения цели распределения, а также секцию 72 определения полосы движения. Секция 72 определения полосы движения является частью, которая реализована посредством ECU 20, выполняющего обработку определения полосы движения (см. фиг. 5) в первом варианте осуществления. Секция 74 определения цели распределения реализована посредством ECU 20, осуществляющего обработку определения цели распределения. При обработке определения цели распределения, цель распределения транспортных средств определяется для каждой полосы на данной проезжей дороге, и дополнительно, пороговые значения полос thri соответствующих полос задаются в соответствии с целями распределения.
[0102] На фиг. 8 показана блок-схема последовательности операций, поясняющая характеристическую часть обработки выбора полосы, выполняемой ECU 20 в настоящем варианте осуществления. Процедура, представленная на фиг. 8, запускается ECU 20, распознающим инструкцию повторного выбора полосы, как в процедуре, представленной на фиг. 5 (этап 44).
[0103] Когда процедура, представленная на фиг. 8, начинается, сначала производится определение, является ли данная проезжая дорога транспортного средства 10 автономного вождения трехполосной дорогой, и самая правая полоса является полосой обгона (этап 76). Например, когда данная проезжая дорога является трехполосной автострадой, определяется установление вышеописанного условия.
[0104] Когда распознается установление вышеописанного условия, затем определяются цели распределения транспортных средств в отношении соответствующих полос на данной проезжей дороге (этап 78). ECU 20 сохраняет цель распределения каждого из полос в соответствии с характеристиками дороги (конфигурацией полос и типом дороги). При этом производится чтение из памяти, и, таким образом, цели распределения самой левой полосы, центральной полосы и полосы обгона определяются, например, соответственно, как 60%, 40% и 0%.
[0105] Затем, пороговые значения полос thri соответствующих полос задаются в соответствии с определенными целями распределения (этап 80). При этом, в частности, пороговое значение полосы thr1, соответствующее самой левой полосе, задается как 0,6, и пороговое значение полосы thr2, соответствующее центральной полосе, задается как 1,0. Пороговое значение полосы thr3 полосы обгона не используется при обработке, и, таким образом, задание здесь опущено.
[0106] Затем обработка определения полосы движения по аналогии со случаем первого варианта осуществления выполняется с использованием пороговых значений полос thr1 и thr2, которые задаются в вышеописанной обработке (этапы 46-60). Содержание обработки определения полосы движения аналогично случаю первого варианта осуществления. Поскольку случайные числа задаются от нуля до 1, 60% случайных чисел имеют меньшие значения, чем пороговое значение полосы thr1. Следовательно, транспортное средство 10 автономного вождения выбирает самую левую полосу как стандартную полосу движения с вероятностью 60% (см. этапы 52 и 54).
[0107] Поскольку все случайные числа имеют меньшие значения, чем thr2 (=1,0), все 40% случайных чисел, которые больше или равны thr1, определяются как меньшие thr2 (см. этап 56). Следовательно, транспортное средство 10 автономного вождения выбирает центральную полосу как стандартную полосу движения с вероятностью 40% (см. этап 58).
[0108] Как описано выше, согласно процедуре, представленной на фиг. 8, на трехполосной дороге, где самая правая полоса является полосой обгона, транспортным средствам 10 автономного вождения можно позволить выбирать самую левую полосу, центральную полосу и полосу обгона как стандартную полосу движения с вероятностями 60%, 40% и 0% соответственно. Когда отдельные транспортные средства 10 автономного вождения рассредотачиваются на соответствующие полосы с вышеуказанными вероятностями, распределение согласно целям распределения, определенным на этапе 78, реализуется в транспортном потоке, включающем в себя множество транспортных средств 10 автономного вождения.
[0109] Когда определено, что проезжая дорога транспортного средства 10 автономного вождения не является трехполосная дорога, в которой самая правая полоса является полосой обгона на вышеописанном этапе 76 в процедуре, представленной на фиг. 8, выполняется обработка задания другого порога (этап 82). На этом этапе, обработка определения, эквивалентная обработке на этапе 76, выполняется последовательно путем изменения условия принятия решения, пока не будут найдены дорожные условия, соответствующие данной проезжей дороге. Когда дорожные условия, соответствующие данной проезжей дороге, найдены, цели распределения и пороговые значения полос thri, которые соответствуют дорожным условиям, задаются посредством обработки, эквивалентной осуществляемой на этапах 78 и 80.
[0110] Согласно вышеописанной обработке, множество транспортных средств 10 автономного вождения может рассредотачиваться на соответствующие полосы, где цели распределения подходят к характеристикам дороги, в многополосной области. Кроме того, отдельные транспортные средства 10 автономного вождения определяют стандартные полосы движения с рассредоточением, как в случае первого варианта осуществления. Следовательно, можно препятствовать возникновению локального уплотнения транспортного потока, как в случае первого варианта осуществления.
[0111] Видоизмененный пример третьего варианта осуществления
Согласно вышеупомянутому третьему варианту осуществления, ECU 20 выполняет обработку определения полосы движения (этапы 46-60) по аналогии со случаем первого варианта осуществления. Обработку определения полосы движения можно заменить обработкой, выполняемой во втором варианте осуществления (см. фиг. 6).
[0112] Кроме того, согласно вышеупомянутому третьему варианту осуществления, цели распределения проезжей дороги сохраняются транспортным средством 10 автономного вождения. Цели распределения могут передаваться транспортному средству 10 автономного вождения из системы связи, которая обеспечена на стороне дороги. Альтернативно, транспортное средство 10 автономного вождения может иметь систему связи, которая принимает цели распределения, обеспеченные сервером, установленным вне транспортного средства. В этом случае, ECU 20 может принимать цели распределения от системы связи.
[0113] Четвертый вариант осуществления
Согласно вышеупомянутым вариантам осуществления с первого по третий, выбор полосы осуществляется с одинаковыми вероятностями на всех транспортных средствах 10 автономного вождения. Например, на проезжей дороге, где пороговое значение полосы thr1 равно 0,6, и пороговое значение полосы thr2 равно 1,0, все транспортные средства 10 автономного вождения выбирают первую полосу с вероятностью 60% и вторую полосу с вероятностью 40%.
[0114] Согласно вышеописанному способу, рассредоточение транспортных средств в отношении 6:4 можно реализовать, в целом, в транспортном потоке, в котором участвует несколько транспортных средств 10 автономного вождения. Однако на отдельных транспортных средствах 10 автономного вождения возникает ситуация, когда полосы выбираются случайным образом без согласования. В этом случае, водители транспортных средств 10 не могут прогнозировать выбор полосы, и, таким образом, могут испытывать дискомфорт.
[0115] Рассредоточение транспортных средств в отношении 6:4 также можно реализовать, предписывая 60% транспортных средств 10 автономного вождения, в основном, выбирать первому полосу, и предписывая 40% транспортных средств 10 автономного вождения, в основном, выбирать вторую полосу, помимо вышеописанного способа. Согласно способу наподобие этого, согласованность в отношении выбора полосы может сообщаться отдельным транспортным средствам 10 автономного вождения. Четвертый вариант осуществления настоящего изобретения отличается тем, что отдельные транспортные средствам 10 автономного вождения получают необычные характеристические значения полос, которые задаются случайным образом, и осуществляют выбор полосы с вероятностями, соответствующими характеристическим значениям полос.
[0116] Далее, особенность четвертого варианта осуществления настоящего изобретения будет подробно описана со ссылкой на фиг. 9 и 10. Транспортное средство 10 автономного вождения настоящего варианта осуществления можно реализовать посредством такой же аппаратной конфигурации, как в случае первого варианта осуществления. На фиг. 9 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Заметим, что на фиг. 9, элементы, идентичные или соответствующие элементам, представленным на фиг. 7, будут обозначены одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0117] Как показано на фиг. 9, в настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 84 характеристического значения полосы, а также секцию 72 определения полосы движения. В ECU 20, характеристическое значение полосы, установленное случайным образом, записывается при отгрузке с завода или поступлении в гараж продавца транспортного средства 10 автономного вождения. Секция 84 характеристического значения полосы реализована посредством ECU 20, выполняющего обработку характеристического значения полосы, которая будет описана ниже, на основании характеристического значения полосы.
[0118] На фиг. 10 показана блок-схема последовательности операций, поясняющая характеристическую часть обработки выбора полосы, выполняемой ECU 20 в настоящем варианте осуществления. В процедуру, представленную на фиг. 10, входят обработка характеристического значения полосы (этапы 86 и 88) и обработка определения полосы движения (этапы 46-60). Обработка определения полосы движения такая же, как в случае первого варианта осуществления (см. фиг. 5), и поэтому их объяснение будет здесь опущено.
[0119] Процедура, представленная на фиг. 10 запускается ECU 20, распознающим инструкцию повторного выбора полосы, как в процедуре, представленной на фиг. 5 (этап 44). Когда процедура начинается, сначала считывается характеристическое значение полосы, сообщаемое транспортному средству 10 автономного вождения (этап 86).
[0120] Затем, задание порогового значения полосы thri осуществляется на основании характеристического значения полосы (этап 88). В качестве порогового значения полосы thri, соответствующего двухполосной дороге, задаются, например, значения thr1 и thr2. Кроме того, в качестве порогового значения полосы thri, соответствующего трехполосной дороге, задаются значения thr1, thr2 и thr3.
[0121] В случае, когда задаются два значения thr1 и thr2, они задаются таким образом, что (thr1, thr2)=(0,8, 1,0) или (thr1, thr2)=(0,2, 1,0) в соответствии с характеристическим значением полосы. Транспортное средство автономного вождения, к которому применяется первое задание, выбирает первую полосу как стандартную полосу движения с вероятностью 80%, и выбирает вторую полосу как стандартную полосу движения с вероятностью 20%. Согласно последнему заданию, транспортное средство автономного вождения выбирает первую полосу с вероятностью 20%, и выбирает вторую полосу с вероятностью 80%. Таким образом, согласно последнему заданию, транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика, согласно которой, в основном, выбирается первая полоса. Напротив, согласно последнему заданию, транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика, согласно которой, в основном, выбирается вторая полоса.
[0122] Кроме того, согласно заданию (thr1, thr2)=(1,0, произвольное значение), транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика, согласно которой первая полоса выбирается с вероятностью 100%. Согласно заданию (thr1, thr2)=(0,0, 1,0), транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика, согласно которой вторая полоса выбирается с вероятностью 100%. Таким образом, согласно настоящему варианту осуществления, отдельному транспортному средству 10 автономного вождения может сообщаться согласованная индивидуальная характеристика, касающаяся выбора полосы.
[0123] Как описано выше, отдельным транспортным средствам 10 автономного вождения сообщаются характеристические значения полос, которые задаются случайным образом. Следовательно, при скоплении нескольких транспортных средств 10 автономного вождения, характеристические значения полос, сообщаемые транспортным средствам 10 автономного вождения, равномерно рассредотачиваются на участке изменения характеристических значений полос. Транспортные средства 10 автономного вождения, имеющие разные характеристические значения полос, демонстрируют разные индивидуальные характеристики, касающиеся выбора полосы. Следовательно, в транспортном потоке, куда входит несколько транспортных средств 10 автономного вождения, рассредоточение происходит в стандартных полосах движения, и реализуется транспортный поток без дисбаланса. Таким образом, согласно настоящему варианту осуществления, можно эффективно предотвращать возникновение локального уплотнения транспортного потока, куда входит несколько транспортных средств 10 автономного вождения, в то время как индивидуальные характеристики, касающиеся выбора полосы, сообщаются отдельным транспортным средствам 10 автономного вождения.
[0124] Видоизмененный пример четвертого варианта осуществления
Согласно вышеупомянутому четвертому варианту осуществления, пороговые значения полос thri задаются на основании характеристических значений полос, которые задаются случайным образом, и, таким образом, индивидуальные характеристики, касающиеся выбора полосы, сообщаются отдельным транспортным средствам 10 автономного вождения. Однако способ сообщения отдельных характеристик транспортным средствам 10 автономного вождения этим не ограничивается. Например, пороговые значения полос thri могут использоваться совместно всеми транспортными средствами 10, если обработка изменяется таким образом, что отдельные транспортные средства 10 автономного вождения выбирают стандартные полосы движения на основании сравнения характеристических значений полос и пороговое значение полосы thri. В этом случае, отдельные транспортные средства 10 автономного вождения имеют индивидуальные характеристики, соответствующие характеристическим значениям полос. Кроме того, поскольку характеристические значения полос являются случайными значениями, различные индивидуальные характеристики сосуществуют при скоплении нескольких транспортных средств 10 автономного вождения, и можно реализовать транспортный поток без локального уплотнения.
[0125] Кроме того, согласно вышеупомянутому четвертому варианту осуществления, характеристическое значение полосы записывается на транспортном средстве 10 автономного вождения при отгрузке с завода или поступлении в гараж продавца. Однако временной режим записи характеристического значения полосы не ограничивается вышеописанным. Например, характеристическое значение полосы может записываться, когда транспортное средство 10 автономного вождения принимает инструкцию запись от внешнего устройства, находящегося вне транспортного средства.
[0126] Пятый вариант осуществления
Далее, пятый вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 11-15. Транспортное средство 10 автономного вождения настоящего варианта осуществления имеет такую же аппаратную конфигурацию, как в случае первого варианта осуществления. Настоящий вариант осуществления отличается тем, что транспортное средство 10 автономного вождения имеет как особенность третьего варианта осуществления, так и особенность четвертого варианта осуществления. В частности, настоящий вариант осуществления отличается тем, что транспортное средство 10 автономного вождения имеет индивидуальную характеристику, касающуюся выбора полосы, и определяет стандартную полосу движения таким образом, что достигается цель распределения проезжей дороги.
[0127] На фиг. 11 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Далее, на фиг. 11, элементы, идентичные или соответствующие элементам, представленным на фиг. 7, будут обозначены одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0128] В настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 90 определения цели распределения и секцию 92 характеристического значения полосы, а также секцию 72 определения полосы движения. Как в случае четвертого варианта осуществления, в настоящем варианте осуществления, транспортному средству 10 автономного вождения сообщается характеристическое значение полосы, задаваемое случайным образом. Секция 92 характеристического значения полосы реализована посредством ECU 20, осуществляющего обработку считывания характеристического значения полосы и передающего характеристическое значение полосы секции 90 определения цели распределения.
[0129] Кроме того, секция 90 определения цели распределения реализована посредством ECU 20, осуществляющего следующую обработку при обработке определения цели распределения:
(1) задание цели распределения транспортных средств на данной проезжей дороге,
(2) выбор графика порогового значения для реализации заданной выше цели распределения, и
(3) определение пороговых значений полос thri соответствующих полос в соответствии с заданным выше графиком порогового значения.
[0130] Фиг. 12 демонстрирует один пример графика порогового значения, который задается на вышеописанном этапе (2) для трехполосной дороги. На фиг. 12, во всем диапазоне участка изменения характеристического значения полосы, задаются пороговое значение полосы thr1 первой полосы и пороговое значение полосы thr2 второй полосы. Отдельное транспортное средство 10 автономного вождения применяет сообщенное ему характеристическое значение полосы к графику, представленному на фиг. 12, и, таким образом, задает пороговые значения полос thr1 и thr2.
[0131] Верхний ряд на фиг. 13 демонстрирует ожидаемое значение S1 первой полосы, выбираемое на основании графика, представленного на фиг. 12. В настоящем варианте осуществления, характеристические значения полос задаются случайным образом. Следовательно, при скоплении нескольких транспортных средств 10 автономного вождения, характеристические значения полос транспортных средств 10 равномерно рассредотачиваются по всему диапазону участка изменения. Отдельное транспортное средство 10 автономного вождения выбирает первую полосу как стандартную полосу движения, когда сгенерированное случайное число меньше, чем пороговое значение полосы thr1, как в случае первого варианта осуществления. В этом случае, в транспортном потоке, куда входит несколько транспортных средств 10 автономного вождения, ожидаемое значение этих транспортных средств 10, выбирающих первую полосу, соответствует области S1, проиллюстрированной в верхнем ряду на фиг. 13.
[0132] Средний ряд на фиг. 13 демонстрирует ожидаемое значение S2 второй полосы, выбираемое на основании графика, представленного на фиг. 12. Транспортное средство 10 автономного вождения выбирает вторую полосу как стандартную полосу движения, когда сгенерированное случайное число больше или равно первому пороговому значению полосы thr1 и меньше второго порогового значения полосы thr2, как в случае первого варианта осуществления. Следовательно, в транспортном потоке, куда входит несколько транспортных средств 10 автономного вождения, ожидаемое значение транспортных средств 10, выбирающих вторую полосу, соответствует области S2, проиллюстрированной в среднем ряду на фиг. 13.
[0133] Нижний ряд на фиг. 13 демонстрирует ожидаемое значение S3 третьей полосы, выбираемое на основании графика, представленного на фиг. 12. Транспортное средство 10 автономного вождения выбирает третью полосу как стандартную полосу движения, когда сгенерированное случайное число больше или равно первому пороговому значению полосы thr1 и больше или равно второму пороговому значению полосы thr2, как в случае первого варианта осуществления. Следовательно, в транспортном потоке, куда входит несколько транспортных средств 10 автономного вождения, ожидаемое значение транспортных средств 10, выбирающих третью полосу, соответствует области S3, проиллюстрированной в нижнем ряду на фиг. 13.
[0134] При вышеупомянутой обработке определения цели распределения, график порога задается таким образом, что S1:S2:S3 соответствует целям распределения. Согласно графику порогового значения, несколько транспортных средств 10 автономного вождения, имеющих индивидуальные характеристики, соответствующие характеристическим значениям полос, соответственно, могут рассредотачиваться в качестве целей распределения.
[0135] На фиг. 14 показана блок-схема последовательности операций, поясняющая характеристическую часть обработки выбора полосы, выполняемой ECU 20 в настоящем варианте осуществления. Процедура, представленная на фиг. 14, включает в себя обработку определения полосы движения (этапы 46-60) помимо обработки характеристического значения полосы (этап 94) и обработки определения цели распределения (этапы 96-104). Обработка определения полосы движения такая же, как в случае первого варианта осуществления (см. фиг. 5), и, таким образом, объяснение будет здесь опущено.
[0136] Процедура, представленная на фиг. 14, запускается ECU 20, распознающим инструкцию повторного выбора полосы, как в процедуре, представленной на фиг. 5 (этап 44). Когда процедура начинается, сначала считывается характеристическое значение полосы, сообщаемое транспортному средству 10 автономного вождения (этап 94).
[0137] Затем производится определение, является ли данная проезжая дорога трехполосной дорогой, и является ли самая правая полоса полосой обгона (этап 96). Когда условия выполняются, цели распределения транспортных средств определяются в отношении соответствующих полос проезжей дороги (этап 98). Обработка на этапах 96 и 98 осуществляется аналогично обработке на этапах 76 и 78, представленных на фиг. 8. При этом цели распределения первой полосы, второй полосы и третьей полосы проезжей дороги определяются, например, как 60%, 20% и 20%.
[0138] Когда цели распределения определены, задается график порогового значения (этап 100). Согласно вышеописанному примеру, задается график порогового значения, в котором соотношение между пороговыми значениями полос thr1 и thr2 и характеристическими значениями полос задается таким образом, что S1:S2:S3 представленное на фиг. 13, становится 60:20:20.
[0139] Затем пороговые значения полос thri соответствующих полос задаются в соответствии с заданным графиком порогового значения (этап 102).
Фиг. 15 демонстрирует способ задания thr1 и thr2 в соответствии с графиком порогового значения. График порогового значения, представленный на фиг. 15, задается таким образом, что устанавливается S1:S2:S3=60:20:20. Когда пороговое значение полосы транспортного средства 10 автономного вождения равно L, как проиллюстрировано, thr1 задается как значение, немного большее 0,2, и thr2 задается как значение, немного меньшее 0,8. В этом случае, транспортному средству 10 автономного вождения сообщается индивидуальная характеристика, согласно которой первая полоса выбирается с вероятностью примерно 20%, вторая полоса выбирается с вероятностью примерно 60%, и третья полоса выбирается с вероятностью примерно 20%.
[0140] Когда условие на вышеописанном этапе 96 не выполняется в процедуре, представленной на фиг. 14, выполняется обработка задания другого порога (этап 104). На этом этапе, пока не найдены дорожные условия, соответствующие данной проезжей дороге, сначала выполняется обработка определения, соответствующая этапу 96, путем последовательного изменения условия. Когда дорожные условия, соответствующие данной проезжей дороге, найдены, цель распределения, соответствующая дорожным условиям и пороговому значению полосы thri, задаются посредством обработки, соответствующей этапам 98-102.
[0141] Согласно вышеописанной обработке, несколько транспортных средств 10 автономного вождения могут рассредотачиваться на соответствующие полосы таким образом, что цели распределения реализуются, как в случае третьего варианта осуществления. Кроме того, отдельному транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика, касающаяся выбора полосы, как в случае четвертого варианта осуществления. Это приводит к тому, что отдельное транспортное средство 10 автономного вождения определяет стандартные полосы движения с рассредоточением, и несколько транспортных средств 10 автономного вождения демонстрируют индивидуальные характеристики с рассредоточением. Это позволяет эффективно предотвращать возникновение локального уплотнения транспортного потока.
[0142] Видоизмененный пример пятого варианта осуществления
Согласно вышеупомянутому пятому варианту осуществления, создается график порогового значения для реализации целей распределения, и отдельное транспортное средство 10 автономного вождения задает пороговые значения полос thri в соответствии с графиком порогового значения. Однако способ реализации целей распределения этим не ограничивается. Например, пороговые значения полос thri можно задавать в качестве целей распределения, и отдельные транспортные средства 10 автономного вождения могут выбирать стандартные полосы движения на основании сравнения характеристических значений полос и пороговых значений полос thri. Например, когда цели распределения представляют собой 60:20:20, задаются thr1=0,6 и thr2=0,8. Отдельным транспортным средствам 10 автономного вождения сообщаются характеристические значения полос, которые задаются случайным образом в диапазоне от нуля до единицы. В этом случае, транспортное средство 10, которому сообщается характеристическое значение полосы менее 0,6, всегда выбирает первую полосу, тогда как транспортное средство 10, которому сообщается характеристическое значение полосы от 0,6 до 0,8, всегда выбирает вторую полосу, и транспортное средство 10, которому сообщается характеристическое значение полосы 0,8 или более, всегда выбирает третью полосу. В результате, отдельным транспортным средствам 10 автономного вождения сообщаются индивидуальные характеристики, касающиеся выбора полосы. Кроме того, при скоплении нескольких транспортных средств 10 автономного вождения, транспортный поток, имеющий цели распределения, реализуется как результат различных индивидуальных характеристик.
[0143] Шестой вариант осуществления
Далее, шестой вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 16 и 17. Транспортное средство 10 автономного вождения настоящего варианта осуществления имеет такую же аппаратную конфигурацию, как в случае первого варианта осуществления. Кроме того, транспортному средству 10 автономного вождения настоящего варианта осуществления сообщается характеристическое значение полосы, задаваемое случайным образом, как в случае четвертого варианта осуществления. ECU 20 выполняет обработку выбора полосы, представленную на фиг. 10, с использованием характеристического значения полосы, как в случае четвертого варианта осуществления. Настоящий вариант осуществления отличается тем, что ECU 20 имеет функцию отражения операции ввода водителя в характеристическом значении полосы.
[0144] На фиг. 16 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Как показано на фиг. 16, транспортное средство 10 автономного вождения настоящего варианта осуществления включает в себя секцию 106 водительского ввода. Секция 106 водительского ввода является интерфейсом, через который водитель транспортного средства 10 предписывает ECU 20 сбросить характеристическое значение полосы.
[0145] Блок-схема, представленная на фиг. 16, идентична блок-схеме четвертого варианта осуществления, представленной на фиг. 9, за исключением того, что сигнал от секции 106 водительского ввода поступает на секцию 108 характеристического значения полосы. Далее, на фиг. 16, элементы, идентичные представленным на фиг. 9, обозначаются одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0146] На фиг. 17 показана блок-схема последовательности операций обработки сброса характеристик, которая выполняется ECU 20 для реализации секция 108 характеристического значения полосы настоящего варианта осуществления. Процедура повторно запускается с заранее определенной периодичностью после активации транспортного средства 10 автономного вождения.
[0147] Когда процедура, представленная на фиг. 17 начинается, сначала производится определение, осуществляет ли водитель операцию сброса характеристического значения полосы (этап 110). Если операция сброса не обнаружена, процедура этого цикла сразу же заканчивается. Если операция сброса характеристического значения полосы обнаружена, обработка задания характеристического значения полосы случайным образом осуществляется (этап 112).
[0148] Согласно вышеупомянутому четвертому варианту осуществления, характеристическое значение полосы задается случайным образом при отгрузке с завода или поступлении в гараж продавца транспортного средства 10 автономного вождения. Индивидуальная характеристика, касающаяся выбора полосы транспортного средства 10 автономного вождения, определяется в соответствии с характеристическим значением полосы. Таким образом, в случае четвертого варианта осуществления, может возникать ситуация, в которой индивидуальная характеристика транспортного средства 10 автономного вождения не совпадает с ощущением водителя.
[0149] Согласно настоящему варианту осуществления, когда индивидуальная характеристика транспортного средства 10 автономного вождения не совпадает с ощущением водителя, водитель может изменять индивидуальную характеристику транспортного средства 10, сбрасывая значение характеристики полосы. Следовательно, согласно настоящему варианту осуществления, индивидуальную характеристику выбора полосы можно дополнительно адаптировать к ощущению водителя, достигая при этом тот же результат, что в случае четвертого варианта осуществления.
[0150] Видоизмененный пример шестого варианта осуществления
Согласно вышеупомянутому шестому варианту осуществления, характеристическое значение полосы сбрасывается случайным образом в результате операции сброса водителя, но способ сброса этим не ограничивается. Например, водитель может самостоятельно напрямую вводить характеристическое значение полосы в соответствии с индивидуальной характеристикой, которую он хочет реализовать. Кроме того, перезапись характеристического значения полосы может осуществляться посредством операции ввода лица, отличного от водителя, или согласно инструкции перезаписи от внешнего устройства, находящегося вне транспортного средства.
[0151] Кроме того, согласно вышеупомянутому шестому варианту осуществления, характеристическое значение полосы сбрасывается в результате операции сброса водителя, но способ изменения характеристического значения полосы этим не ограничивается. Например, предпочтение, отдаваемое водителем в своих операциях, может отражаться в характеристическом значении полосы.
[0152] На фиг. 18 показана блок-схема последовательности операций первого примера обработки сброса характеристик, отражающая предпочтение водителя в отношении характеристического значения полосы. После загрузки процедуры, датчик угла руления и т.п., который обнаруживает операцию руления, функционирует как секция 106 водительского ввода.
[0153] В процедуре, представленной на фиг. 18, сначала производится определение, осуществляется ли автономное вождение (этап 114). Если автономное вождение не осуществляется, обработка этого цикла сразу же заканчивается. Если определено, что автономное вождение осуществляется, то определяется, осуществляется ли перестроение между полосами посредством инициирующей операции водителя (этап 116).
[0154] Когда водитель осуществляет операцию вождения во время автономного вождения, транспортное средство 10 автономного вождения распознает операцию как инициирующую операцию и возвращает водителю роль управления транспортным средством. Перестроение между полосами посредством инициирующей операции осуществляется, когда водитель испытывает дискомфорт при выборе полосы посредством автономного вождения. Следовательно, предпочтение водителя, касающееся выбора полосы, отражается в инициирующей операции.
[0155] Если на вышеописанном этапе 116 перестроение между полосами посредством инициирующей операции не распознается, обработка этого цикла сразу же заканчивается. Если перестроение между полосами посредством инициирующей операции распознается, полоса после перестроения отражается в характеристическом значении полосы (этап 118). Например, когда перестроение в полосу обгона осуществляется посредством инициирующей операции, характеристическое значение полосы корректируется таким образом, что вероятность выбора полосы обгона увеличивается. Кроме того, когда перестроение в полосу замедленного движения на подъеме осуществляется посредством инициирующей операции, характеристическое значение полосы корректируется таким образом, что вероятность выбора полосы замедленного движения на подъеме увеличивается. Согласно подобной обработке, индивидуальную характеристику транспортного средства 10 автономного вождения можно надлежащим образом согласовывать с предпочтением водителя.
[0156] На фиг. 19 показана блок-схема последовательности операций второго примера обработка сброса характеристик, отражающая предпочтение водителя в отношении характеристического значения полосы. Даже когда настоящая процедура установлена, датчик угла руления и т.п., который обнаруживает операцию руления, также служит секцией 106 водительского ввода.
[0157] В процедуре, представленной на фиг. 19, сначала производится определение, осуществляется ли автономное вождение (этап 120). Когда определено, что автономное вождение не осуществляется, можно определить, что водитель вручную управляет транспортным средством 10 автономного вождения. В этом случае, ECU 20 обучается на основании полосы, которую выбирает водитель (этап 122). Обучение позволяет ECU 20 обнаруживать предпочтение водителя, касающееся выбора полосы.
[0158] Если на вышеописанном этапе 120 определено, что осуществляется автономное вождение, производится определение, соответствует ли цикл обработки этого времени начальному времени автономного вождения (этап 124). Если определено, что цикл обработки не соответствует начальному времени автономного вождения, обработка этого цикла сразу же заканчивается. Если определено, что цикл обработки соответствует начальному времени автономного вождения, результат полосы, изученной на вышеописанном этапе 122, отражается в характеристическом значении полосы (этап 126). В частности, когда изучено, что водитель предпочитает полосу движения, характеристическое значение полосы корректируется таким образом, что вероятность выбора полосы движения увеличивается. Кроме того, когда изучено, что водитель предпочитает полосу обгона, характеристическое значение полосы корректируется таким образом, что вероятность выбора полосы обгона увеличивается. Согласно вышеописанной обработке, индивидуальную характеристику транспортного средства 10 автономного вождения можно надлежащим образом согласовывать с предпочтением водителя.
[0159] Кроме того, значение инструкции водителя, которая оказывает влияние на поведение транспортного средства может отражаться в характеристическом значении полосы. В качестве первого примера отражения значения инструкции, заданного водителем, в характеристическом значении полосы, допустимо задавать характеристическое значение полосы в соответствии с заданной скоростью автокруиза. Автокруиз представляет собой функцию поддержания скорости транспортного средства равной скорости, заданной водителем. Когда заданная скорость транспортного средства высока, определяется, что водитель предпочитает высокоскоростное крейсерование. Напротив, когда заданная скорость транспортного средства низка, можно определить, что водитель предпочитает низкоскоростное крейсерование. Следовательно, характеристическое значение полосы можно сбрасывать таким образом, что, чем выше заданная скорость автокруиза транспортного средства, тем легче выбирается высокоскоростная полоса. Согласно примеру, на дороге с левосторонним движением, где полоса обгона располагается справа, правая полоса выбирается тем легче, чем выше заданная скорость автокруиза. Кроме того, чем ниже заданная скорость, тем легче выбирается левая полоса. В результате, транспортное средство 10 автономного вождения демонстрирует индивидуальную характеристику, которая согласуется с предпочтением водителя.
[0160] В порядке второго примера отражения значения инструкции, задаваемого водителем, в характеристическом значении полосы, допустимо задавать характеристическое значение полосы в соответствии с расстоянием до пункта назначения. При достаточно большом расстоянии до пункта назначения, в общем случае, предпочтительна высокая круизная скорость. С другой стороны, при малом расстоянии до пункта назначения, снижение частоты перестроения между полосами более желательно, чем получение высокой круизной скорости. Следовательно, характеристическое значение полосы можно задавать таким образом, что с увеличением расстояния от места начала движения до пункта назначения, облегчается выбор высокоскоростной полосы. Согласно примеру, на дороге с левосторонним движением, где полоса обгона находится справа, правая полоса выбирается тем легче, чем больше расстояние от места начала движения до пункта назначения. Кроме того, по мере сокращения расстояния до пункта назначения, тем легче выбирается левая полоса. В результате, в случае дальней поездки, транспортному средству 10 автономного вождения может сообщаться индивидуальная характеристика высокоскоростного круиза. Кроме того, в случае ближней поездки, транспортному средству 10 автономного вождения может постоянно сообщаться индивидуальная характеристика перемещения по полосе движения.
[0161] В этой связи, в шестом варианте осуществления и вышеописанном видоизмененном примере, не обеспечена защита от изменения характеристического значения полосы. В этом случае, может возникать ситуация, в которой характеристическое значение полосы значительно изменяется, и индивидуальная характеристика транспортного средства 10 автономного вождения резко изменяется. Во избежание подобного резкого изменения индивидуальной характеристики, может быть обеспечена защита по величине изменения характеристического значения полосы, разрешенной при одном перестроении.
[0162] Кроме того, в шестом варианте осуществления и вышеописанном видоизмененном примере, на транспортном средстве 10 автономного вождения хранится только одно характеристическое значение полосы, но на одном транспортном средстве 10 может храниться множество характеристических значений полос, исходя из наличия множества пользователей. В этом случае, характеристическое значение полосы можно сбрасывать для каждого из пользователей, таким же образом, как положение сиденья и пр.
[0163] Кроме того, в шестом варианте осуществления и вышеописанном видоизмененном примере, ECU 20 выполняет такую же обработку выбора полосы, как в случае четвертого варианта осуществления (см. фиг. 10). Однако обработка выбора полосы, выполняемая ECU 20, не ограничивается обработкой, представленной на фиг. 10. Обработку можно заменить обработкой выбора полосы в пятом варианте осуществления, представленной на фиг. 14, например.
[0164] Седьмой вариант осуществления
Далее, седьмой вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 20 и 21. Транспортное средство 10 автономного вождения настоящего варианта осуществления имеет такую же аппаратную конфигурацию, как в случае первого варианта осуществления. Кроме того, транспортное средство 10 автономного вождения настоящего варианта осуществления определяет цели распределения транспортных средств в многополосной области и определяет стандартную полосу движения, что позволяет реализовать цели распределения, как в случае третьего варианта осуществления (см. фиг. 7 и 8).
[0165] Согласно вышеупомянутому третьему варианту осуществления, цель распределения задается в соответствии с характеристиками дороги (конфигурацией полос и типом дороги). Затем, даже когда реальное распределение транспортных средств значительно отклоняется от целей распределения, транспортное средство 10 автономного вождения выбирает стандартную полосу движения в соответствии с ранее определенными целями распределения. Например, когда реальное распределение транспортных средств представляет собой 80:20, на проезжей дороге, где цели распределения первой полосы и второй полосы находятся в отношении 60:40, для достижения целей распределения необходимо увеличить долю транспортных средств 10, выбирающих вторую полосу. Однако, согласно третьему варианту осуществления, 60% транспортных средств 10 автономного вождения выбирает первую полосу даже в подобном случае, и может возникать ситуация, в которой реальное распределение транспортных средств еще больше отклоняется от целей распределения. Настоящий вариант осуществления отличается тем, что во избежание подобного неудобства, к целям распределения на отдельных транспортных средствах 10 автономного вождения применяется коррекция, благодаря которой реальное распределение транспортных средств приближается к целям распределения.
[0166] На фиг. 20 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. В дальнейшем, на фиг. 20, элементы, идентичные представленным на фиг. 7 будут обозначены одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0167] В настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 128 интерпретации транспортного потока. Секция 128 интерпретации транспортного потока обнаруживает реальное распределение транспортных средств вокруг транспортного средства 10 автономного вождения, на основании информации, поступающей от секции 34 распознавания окружающих объектов и секции 36 распознавания проезжей дороги.
[0168] Распределение транспортных средств, обнаруженное секцией 128 интерпретации транспортного потока, поступает на секцию 130 определения цели распределения. Секция 130 определения цели распределения реализована посредством ECU 20, осуществляющего обработку определения цели распределения. В настоящем варианте осуществления, цели распределения, которые задаются в соответствии с характеристиками дороги, корректируются на основании реального распределения транспортных средств посредством обработки определения цели распределения. Затем пороговые значения полос thri задаются на основании скорректированных целей распределения на отдельном транспортном средстве 10 автономного вождения.
[0169] На фиг. 21 показана блок-схема последовательности операций обработки выбора полосы, выполняемой ECU 20 в настоящем варианте осуществления. Помимо обработки определения цели распределения (этапы 132, 134, и 138-144) и обработки интерпретации транспортного потока (этап 136), в процедуру, представленную на фиг. 21, входит обработка определения полосы движения (этапы 46-60). Обработка определения полосы движения такая же, как в случае первого варианта осуществления (см. фиг. 5), и, таким образом объяснение будет здесь опущено.
[0170] Процедура, представленная на фиг. 21, запускается ECU 20, распознающим инструкцию повторного выбора полосы, аналогично процедуре, представленной на фиг. 8 (этап 44). Когда процедура начинается, сначала производится определение, является ли данная проезжая дорога трехполосной дорогой, и является ли самая правая полоса полосой обгона (этап 132). Когда распознается установление условия, цели распределения транспортных средств определяются для соответствующих полос проезжей дороги (этап 134). Обработка этапов 132 и 134 осуществляется аналогично обработке на этапах 76 и 78, представленных на фиг. 8. При этом цели распределения первой полосы, второй полосы и третьей полосы определяются, например, как 60%, 20% и 20%, на основании характеристики проезжей дороги.
[0171] Когда цели распределения определены, обнаруживается реальное распределение транспортных средств (этап 136). В частности, сначала вычисляется плотность транспортных средств для каждой из полос проезжей дороги, на основании информации, поступающей от секции 34 распознавания окружающих объектов. Затем, путем сравнения плотностей транспортных средств соответствующих полос, вычисляется распределение транспортных средств на данной проезжей дороге.
[0172] Затем производится определение, имеется ли полоса, в которой отношение распределения транспортных средств превышает цель распределения (этап 138). Когда определено, что полоса, в которой отношение распределения превышает отношение цели распределения, существует, цель распределения корректируется таким образом, что отношение полосы уменьшается (этап 140). Например, когда реальное распределение транспортных средств составляет 80:20:0, тогда как целью распределения является 60:20:20, отношение целей распределения первой полосы уменьшается (например, от 60 до 40), и цель распределения третьей полосы увеличивается (например, от 20 до 40). Когда определено, что полоса, в которой отношение распределения превышает цель распределения, отсутствует, обработка на этапе 140 пропускается, и цели распределения, которые задаются на вышеописанном этапе 134, остаются неизменными.
[0173] Когда вышеописанная обработка заканчивается, пороговые значения полос thri соответствующих полос задаются в соответствии с целями распределения, которые корректируются или определяются как не требующие коррекции (этап 142). Например, когда цель распределения корректируется до 40:20:40, пороговое значение полосы thr1 первой полосы задается равным 0,4, и пороговое значение полосы thr2 второй полосы задается равным 0,6. В этом случае, отношение распределения только транспортных средств 10 автономного вождения составляет 40:20:40, и реальное распределение транспортных средств (80:20:0) приближается к целям распределения (60:20:20) проезжей дороги.
[0174] Когда условие на вышеописанном этапе 132 в процедуре, представленной на фиг. 21, не выполняется, выполняется другая обработка задания пороговых значений (этап 144). В данном случае, обработка определения, соответствующая этапу 132, сначала выполняется путем последовательного изменения условия, пока не будут найдены дорожные условия, соответствующие данной проезжей дороге. Когда дорожные условия, соответствующие данной проезжей дороге, найдены, цель распределения и пороговое значение полосы thri, которые соответствуют дорожным условиям, задаются посредством обработки, соответствующей этапам 134-142.
[0175] Согласно вышеописанной обработке, цели распределения отдельных транспортных средств 10 автономного вождения надлежащим образом корректируются, когда реальное распределение транспортных средств отклоняется от целей распределения, что позволяет приближать реальное распределение транспортных средств к основным целям распределения. Наконец, в транспортном потоке, включающем в себя транспортные средства неавтономного вождения, могут достигаться подлинные цели распределения проезжей дороги.
[0176] Видоизмененный пример седьмого варианта осуществления
Согласно вышеупомянутому седьмому варианту осуществления, ECU 20 задает цели распределения проезжей дороги в таком же процессе, как в случае третьего варианта осуществления (см. этапы 132 и 134). Однако задание может осуществляться в таком же процессе, как в случае пятого варианта осуществления. Нужную функцию можно реализовать, вставляя обработку из этапов 136-140, представленных на фиг. 21, между этапами 98 и 100, в процедуре, представленной, например, на фиг. 14.
[0177] Кроме того, согласно вышеупомянутому седьмому варианту осуществления, реальное распределение транспортных средств обнаруживается отдельными транспортными средствами 10 автономного вождения на основании информации и пр. от секции 34 распознавания окружающих объектов. Однако распределение транспортных средств можно принимать от инфраструктуры на дороге посредством связи между дорогой и транспортным средством.
[0178] Альтернативно, транспортное средство 10 автономного вождения может иметь систему связи, которая принимает реальное распределение транспортных средств, предоставляемое сервером, установленным вне транспортного средства. В этом случае, ECU 20 может принимать распределение транспортных средств от системы связи. В качестве маршрута передачи информации в этой модификации, можно рассмотреть следующие два примера.
(1) Пример инфраструктуры вне транспортного средства, вычисляющей распределение транспортных средств
Распределение транспортных средств распределяется согласно маршруту от инфраструктуры вне транспортного средства к серверу вне транспортного средства на соответствующие транспортные средства 10 автономного вождения.
(2) Пример сервера вне транспортного средства, вычисляющего распределение транспортных средств
Соответствующие транспортные средства 10 автономного вождения передают свои положения транспортных средств и/или информацию распознавания окружения на сервер вне транспортного средства.
Сервер вне транспортного средства собирает информацию и вычисляет текущее распределение транспортных средств.
Распределение транспортных средств распределяется на соответствующие транспортные средства 10 автономного вождения от сервера вне транспортного средства.
[0179] Восьмой вариант осуществления
Согласно вышеупомянутым третьему, пятому и седьмому вариантам осуществления, ECU 20 включает в себя секции 74, 90 и 130 определения цели распределения (см. фиг. 7, 11 и 20). Секции 74, 90 и 130 определения цели распределения задают цели распределения в соответствии с характеристиками дороги, и предписывают отдельному транспортному средству 10 автономного вождения выбирать стандартные полосы движения, что позволяет реализовать цели распределения.
[0180] Цели распределения, которые задаются в соответствии с характеристиками дороги, изменяются до и после места изменения характеристик дороги. В частности, в третьем, пятом и седьмом вариантах осуществления, цели распределения проезжей дороги изменяются до и после места увеличения или уменьшения количества полос.
[0181] Когда цели распределения отдельных транспортных средств 10 одновременно изменяются в конкретном месте в транспортном потоке, включающем в себя несколько транспортных средств 10 автономного вождения, несколько транспортных средств 10 автономного вождения должны одновременно осуществлять перестроение между полосами в месте согласно следующему изменению. Подобное одновременное изменение становится причиной разупорядочения транспортного потока и не является предпочтительным. Настоящий вариант осуществления отличается тем, что, во избежание такого беспорядка, область постепенного изменения целей распределения обеспечивается до и после места изменения характеристик дороги, и цели распределения постепенно изменяются в области постепенного изменения.
[0182] Далее, восьмой вариант осуществления настоящего изобретения будет подробно описан со ссылкой на фиг. 22 и 23 совместно с фиг. 8. Транспортное средство 10 автономного вождения настоящего варианта осуществления можно реализовать посредством такой же аппаратной конфигурации, как в случае первого варианта осуществления.
[0183] На фиг. 22 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Заметим, что на фиг. 22, элементы, идентичные или соответствующие элементам, представленным на фиг. 7 будут обозначены одинаковыми ссылочными позициями, и объяснение будет опущено или упрощено.
[0184] Как показано на фиг. 22, в настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 146 определения цели распределения, а также секцию 72 определения полосы движения. Секция 146 определения цели распределения дополнительно включает в себя секцию 148 интерпретации окружающих географических особенностей, секцию 150 задания области постепенного изменения и секцию 152 задания цели. Секция 148 интерпретации окружающих географических особенностей распознает характеристики данной проезжей дороги на основании информации и т.п. от секции 36 распознавания проезжей дороги. Секция 150 задания области постепенного изменения задает область постепенного изменения для постепенного изменения целей распределения перед и после места изменения характеристик дороги. Секция 152 задания цели осуществляет обработку задания целей распределения, которые постепенно изменяются в области постепенного изменения. Все эти секции реализуются посредством ECU 20, осуществляющего обработку определения цели распределения.
[0185] На фиг. 23 показана схема, поясняющая содержание характеристической части обработки определения цели распределения в настоящем варианте осуществления. Обработка определения цели распределения в настоящем варианте осуществления реализована посредством обработки на этапах 76-82, представленных на фиг. 8. Следует отметить, что на этапе 78 в настоящем варианте осуществления выполняется обработка, которая будет описана ниже.
[0186] Верхний ряд на фиг. 23 демонстрирует основную цель распределения проезжей дороги, которая задается на основании характеристик проезжей дороги, распознаваемых секцией 148 интерпретации окружающих географических особенностей. В частности, она демонстрирует особенность, в которой двухполосная дорога переходит в трехполосную дорогу в месте P1. Кроме того, показано, что цели распределения двухполосной секции составляют 70:30, и цели распределения трехполосной секции составляют 60:40:0.
[0187] Средний ряд на фиг. 23 демонстрирует, что область постепенного изменения задается между местом P1 и местом P2. В ситуации, когда количество полос будет увеличиваться, желательно, чтобы основные цели распределения оставались неизменными, пока количество полос действительно не увеличится. Во избежание беспорядка в транспортном потоке, желательно, чтобы перестроение между полосами происходило постепенно в соответствии с новой среде полос от места P1, где количество полос увеличивается. Следовательно, в случае, когда полоса количество будет увеличиваться, область постепенного изменения обеспечивается после места P1, где происходит изменение. С другой стороны, в случае, когда происходит уменьшение количества полос, желательно, чтобы распределение транспортных средств постепенно изменялось до того, как количество полос действительно уменьшится, для проведения подготовки к среде после уменьшения. Следовательно, в случае, когда происходит уменьшение количества полос, область постепенного изменения задается до точки изменения.
[0188] ECU 20 сохраняет положение области постепенного изменения относительно точки изменения и длину области постепенного изменения, в соответствии с типом изменения характеристик дороги. В секции 150 задания области постепенного изменения область постепенного изменения задается на основании их сохраненных значений.
[0189] Нижний ряд на фиг. 23 демонстрирует состояние, в котором цели распределения 70:30 постепенно изменяются к 60:40:0 в области постепенного изменения. Секция 152 задания цели делит область постепенного изменения и задает целевые численные значения таким образом, что цели распределения, заданные перед областью постепенного изменения, плавно изменяются к целям распределения, заданным за областью постепенного изменения.
[0190] На этапе 78 в процедуре, представленной на фиг. 8, численные значения, заданные секцией 152 задания цели, определяются в качестве целей распределения. На этапе 80, пороговые значения полос thr1 и thr2 задаются в соответствии с целями распределения. В этом случае, пороговые значения полос thr1 и thr2 постепенно изменяются в области постепенного изменения, и распределение транспортных средств 10 автономного вождения постепенно изменяется до и после точки изменения.
[0191] Как описано выше, согласно настоящему варианту осуществления, цели распределения транспортного средства 10 автономного вождения могут постепенно меняться на новые цели распределения до и после точки изменения на дороге. Когда цели распределения транспортных средств 10 автономного вождения постепенно изменяются, перестроение между полосами не осуществляется одновременно в точке изменения. Следовательно, согласно настоящему варианту осуществления, транспортный поток может оставаться плавным даже когда через точку изменения проходит несколько транспортных средств автономного вождения.
[0192] Видоизмененный пример восьмого варианта осуществления
Согласно вышеупомянутому восьмому варианту осуществления, разрешено перестроение между любыми полосами в области постепенного изменения целей распределения. Однако ограничение может накладываться на полосы, где перестроение между полосами разрешено в области постепенного изменения. Например, в секции от точки изменения до точки в 300 м от нее, может быть разрешено только перестроение из второй полосы в первую полосу, и в секции от 300 м от точки до 600 м от точки, может быть разрешено только перестроение из третьей полосы во вторую полосу. Когда подобное ограничение налагается на перестроение между полосами, входящее транспортное средство и выходящее транспортное средство не мешают друг другу, и можно эффективно предотвращать беспорядок в транспортном потоке.
[0193] Девятый вариант осуществления
Далее, девятый вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 24-26. Транспортное средство 10 автономного вождения настоящего варианта осуществления можно реализовать посредством такой же аппаратной конфигурации, как в случае первого варианта осуществления.
[0194] На фиг. 24 показана блок-схема, демонстрирующая характеристическую часть ECU 20 в настоящем варианте осуществления. Заметим, что на фиг. 24, элементы, идентичные или соответствующие элементам, представленным на фиг. 7, будут обозначены одинаковыми ссылочными позициями, и их объяснение будет опущено или упрощено.
[0195] Как показано на фиг. 24, в настоящем варианте осуществления, секция 38 выбора полосы включает в себя секцию 154 интерпретации окружающих географических особенностей, секцию 156 интерпретации транспортного потока и секцию 158 инструкций остановки рассредоточения, а также секцию 72 определения полосы движения. Секция 154 интерпретации окружающих географических особенностей обнаруживает ситуацию данной проезжей дороги транспортного средства 10 автономного вождения на основании информации и пр. от секции 36 распознавания проезжей дороги. Кроме того, секция 156 интерпретации транспортного потока обнаруживает, как транспортные средства перемещаются в среде, окружающей транспортное средство 10 автономного вождения, на основании информации и пр. от секции 34 распознавания окружающих объектов.
[0196] Секция 158 инструкций остановки рассредоточения определяет, происходит ли явление рекомендации не производить перестроение вокруг транспортного средства 10 автономного вождения, на основании результата обнаружения секции 154 интерпретации окружающих географических особенностей и результата обнаружения секции 156 интерпретации транспортного потока. Явление рекомендации не производить перестроение это явление, в котором наиболее подходящая полоса, определяемая из ситуации вокруг транспортного средства 10 автономного вождения, выбирается в качестве полосы движения без учета необходимости рассредоточения. Распознав подобное явление рекомендации не производить перестроение, секция 158 инструкций остановки рассредоточения формирует инструкцию для остановки обработки определения стандартной полосы движения в режиме, когда происходит рассредоточение.
[0197] На фиг. 25 показана схема, поясняющая типичный пример вышеупомянутого явления рекомендации не производить перестроение. Верхний ряд на фиг. 25 демонстрирует состояние, в котором транспортное средство 10 автономного вождения движется в цепочке транспортных средств в автомобильной пробке. Когда отдельное транспортное средство неосторожно осуществляет перестроение между полосами в заторе, транспортный поток еще более стагнирует. Следовательно, при обнаружении затора, секция 158 инструкций остановки рассредоточения определяет, что происходит явление рекомендации не производить перестроение, и формирует вышеописанную инструкцию остановки. Возникновение затора можно обнаруживать на основании плотности других присутствующих вокруг транспортных средств в полосе движения и соседних полосах, средней скорости самого транспортного средства и пр.
[0198] Заметим, что можно определить, происходит ли затор на основании информации, которая поступает со стороны инфраструктуры посредством связи между дорогой и транспортным средством. Альтернативно, транспортное средство 10 автономного вождения может иметь систему связи, которая принимает возникновение затора, обеспеченного сервером, установленным вне транспортного средства. В этом случае, ECU 20 может принимать возникновение затора от системы связи. В качестве маршрута передачи информации в этом случае, можно рассмотреть следующие два примера.
(1) Пример инфраструктуры вне транспортного средства, определяющей возникновение затора
Информация возникновения затора распределяется по маршруту от инфраструктуры вне транспортного средства к серверу вне транспортного средства на соответствующие транспортные средства 10 автономного вождения.
(2) Пример сервера вне транспортного средства, определяющего возникновение затора
Соответствующие транспортные средства 10 автономного вождения передают свои положения транспортных средств и/или информацию распознавания окружения на сервер вне транспортных средств.
Сервер вне транспортных средств интегрирует информацию и определяет наличие или отсутствие затора.
Информация возникновения затора распределяется на соответствующие транспортные средства 10 автономного вождения от сервера вне транспортных средств.
[0199] Средний ряд на фиг. 25 демонстрирует состояние, в котором транспортное средство 160 экстренной службы перемещается с высокой скоростью на полосе обгона, когда транспортное средство 10 автономного вождения перемещается на полосе движения. В таком случае, желательно, чтобы перестроение между полосами, которое мешает прохождению транспортного средства 160 экстренной службы, не осуществлялось. Поэтому, при обнаружении приближения транспортного средства 160 экстренной службы, секция 158 инструкций остановки рассредоточения определяет, что происходит явление рекомендации не производить перестроение, и формирует вышеописанную инструкцию остановки. Приближение транспортного средства 160 экстренной службы можно обнаруживать на основании звука и света, излучаемого транспортным средством 160 экстренной службы, относительной скорости приближающегося транспортного средства и самого транспортного средства и пр. Однако приближение транспортного средства экстренной службы также можно определить на основании информации, которая обеспечивается посредством связи между дорогой и транспортным средством.
[0200] Ситуация, аналогичная ситуации, проиллюстрированной в среднем ряду на фиг. 25, также возникает, когда высокоскоростное транспортное средство движется по полосе обгона. В таком случае, с точки зрения поддержания плавного транспортного потока, желательно не препятствовать движению высокоскоростного транспортного средства. Следовательно, секция 158 инструкций остановки рассредоточения также определяет, что происходит явление рекомендации не производить перестроение, и формирует вышеописанную инструкцию остановки при распознавании приближающегося транспортного средства, относительная скорость которого чрезвычайно высока на полосе обгона.
[0201] Нижний ряд на фиг. 25 демонстрирует ситуацию, когда транспортное средство 10 автономного вождения находится на краю секции строительства в первой полосе проезжей дороги. в подобной ситуации, транспортные средства сосредотачиваются на второй полосе, что нарушает баланс распределения транспортных средств. Однако в подобной ситуации, с точки зрения поддержания плавного транспортного потока, транспортному средству 10 автономного вождения не следует позволять выбирать первую полосу. Следовательно, при обнаружении секции строительства, секция 158 инструкций остановки рассредоточения также определяет, что происходит явление рекомендации не производить перестроение, и формирует вышеописанную инструкцию остановки. Возникновение секции строительства можно обнаруживать путем распознавания дорожных конусов (пилонов), расположенных на дороге, дорожного знака, указывающего ограничения полос и пр.
[0202] Ситуация аналогичная ситуации, проиллюстрированной в нижнем ряду на фиг. 25, также возникает в случае, когда на дороге присутствует, например, упавший объект. В этом случае, несколько транспортных средств осуществляют перестроение в другие полосы из полосы, где присутствует упавший объект, и, таким образом, происходит разбалансировка транспортного потока. Однако, в этом случае, транспортному средству 10 автономного вождения не следует позволять выбирать свободную полосу. Следовательно, когда несколько транспортных средств осуществляют перестроение в другие полосы из конкретной полосы, секция 158 инструкций остановки рассредоточения также определяет, что происходит явление рекомендации не производить перестроение и формирует вышеописанную инструкцию остановки. Перестроение между полосами предшествующих транспортных средств можно обнаруживать на основании активации индикаторов направления и, например, изменений траектории предшествующих транспортных средств.
[0203] На фиг. 26 показана блок-схема последовательности операций обработки выбора полосы, выполняемой ECU 20 в настоящем варианте осуществления. Процедура, представленная на фиг. 26, включает в себя обработку определения полосы движения (этапы 46-60) помимо обработки обнаружения окружающей географической особенности и транспортного потока (этап 162) и обработки определения возникновения инструкции остановки рассредоточения (этап 164). Обработка определения полосы движения такая же, как в случае первого варианта осуществления (см. фиг. 5), и, таким образом объяснение будет здесь опущено.
[0204] Процедура, представленная на фиг. 26, запускается ECU 20, распознающим инструкцию повторного выбора полосы, как в процедуре, представленной на фиг. 5 (этап 44). Когда процедура начинается, сначала выполняется обработка обнаружения окружающей географической особенности /транспортного потока (этап 162). В частности, на основании различные типов информации, поступающих от секции 34 распознавания окружающих объектов и секции 36 распознавания проезжей дороги, обнаруживаются текущая ситуация проезжей дороги и ситуация других присутствующих вокруг транспортных средств.
[0205] Затем производится определение, выполняется ли условие, при котором должна возникать инструкция остановки рассредоточения (этап 164). В частности, на основании результата обнаружения вышеописанного этапа 162, производится определение, выявлено ли какое-либо из следующих явлений рекомендации не производить перестроение.
(1) Затор в движении
(2) Прохождение транспортного средства неотложной помощи
(3) Прохождение высокоскоростного транспортного средства
(4) Возникновение секции строительства
(5) Перестроение нескольких транспортных средств из конкретной полосы в другие полосы
[0206] Если на этапе 164 не распознается ни одно из явлений рекомендации не производить перестроение, то стандартная полоса движения определяется, как в случае первого варианта осуществления посредством обработки этапа 46 и следующих этапов. В этом случае, рассредоточение происходит в стандартных полосах движения в транспортном потоке, куда входит несколько транспортных средств 10 автономного вождения, и можно избегать возникновения несбалансированного транспортного потока.
[0207] Если на вышеописанном этапе 164 распознается возникновение какого-либо явления рекомендации не производить перестроение, данная полоса выбирается в качестве полосы движения на этапе 48. Транспортное средство 10 автономного вождения имеет функцию выбора оптимальной полосы, соответствующей ситуации данной проезжей дороги и ситуации других присутствующих вокруг транспортных средств в другой процедуре. На этом этапе, полоса, определяемая функцией, выбирается в качестве полосы движения. В этом случае, несколько транспортных средств 10 автономного вождения, находящихся в одной и той же ситуации, выбирают одну и ту же полосу в качестве полос движения. В ситуации, когда происходят явления рекомендации не производить перестроение, желательно, чтобы транспортный поток оставался плавным, чтобы несколько транспортных средств 10 автономного вождения выбирало оптимальную полосу без рассредоточения. Вышеописанная обработка позволяет удовлетворять этому требованию.
[0208] Как описано выше, согласно настоящему варианту осуществления, в ситуации, в которой отдельные транспортные средства 10 автономного вождения не должны независимо осуществлять перестроение между полосами, обработка определения стандартной полосы движения в режиме рассредоточения может останавливаться. Следовательно, согласно настоящему варианту осуществления, транспортный поток может оставаться плавным даже в подобной ситуации.
[0209] В этой связи, в вышеупомянутом девятом варианте осуществления, функция формирования инструкции остановки рассредоточения объединяется с обработкой первого варианта осуществления, но объединение этим не ограничивается. Таким образом, функция формирования инструкции остановки рассредоточения может объединяться с любым из вышеупомянутых вариантов осуществления с первого по восьмой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ (ВАРИАНТЫ) | 2018 |
|
RU2707855C1 |
| СИСТЕМА АВТОНОМНОГО ВОЖДЕНИЯ | 2017 |
|
RU2678789C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВОЖДЕНИЯ | 2010 |
|
RU2520855C2 |
| АВТОНОМНАЯ СИСТЕМА ВОЖДЕНИЯ И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ АВТОНОМНОГО ВОЖДЕНИЯ | 2019 |
|
RU2720659C1 |
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2641023C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2754707C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2783421C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2760046C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НЕПРАВИЛЬНОГО РАСПОЗНАВАНИЯ | 2016 |
|
RU2645388C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2724938C1 |
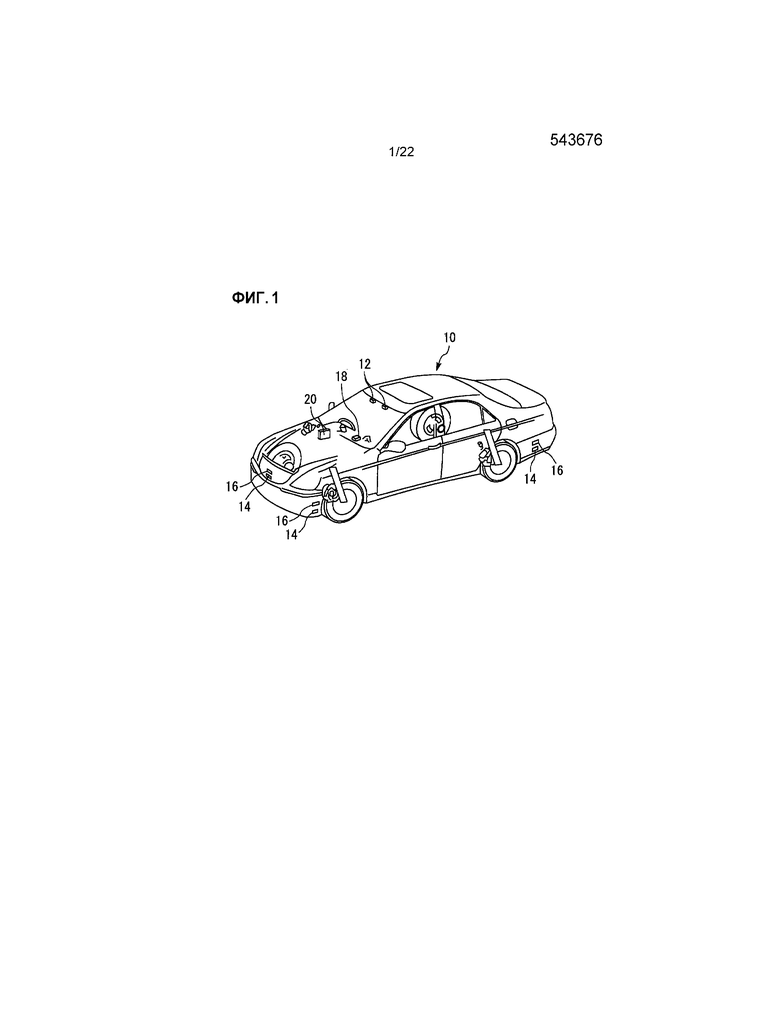
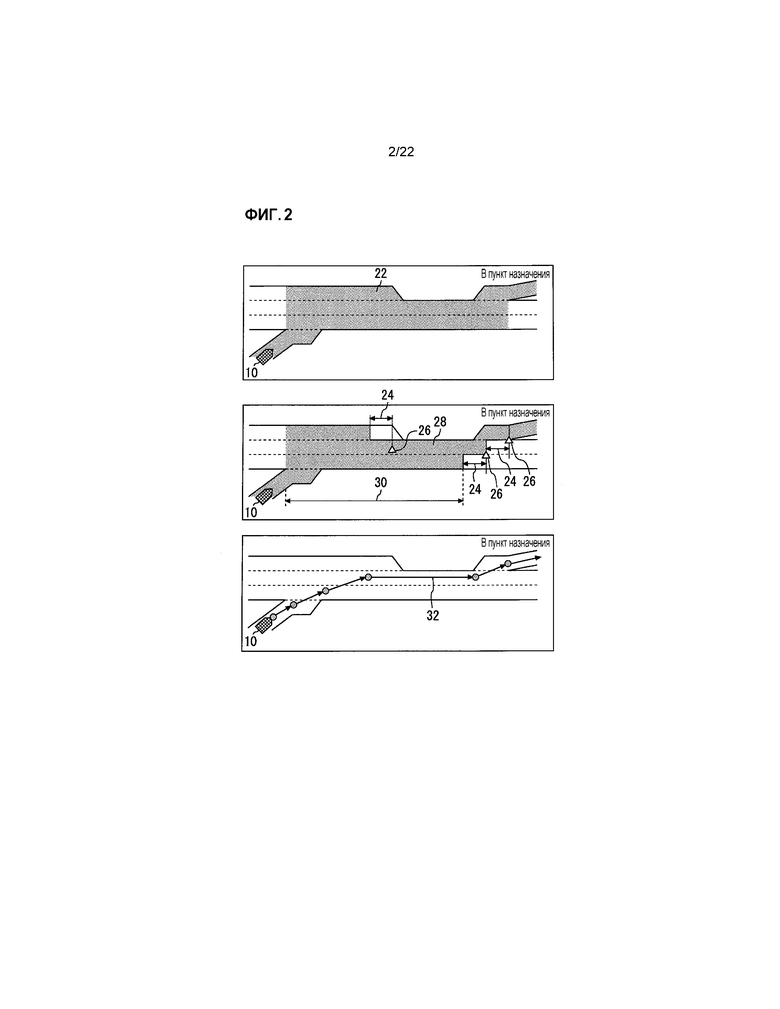
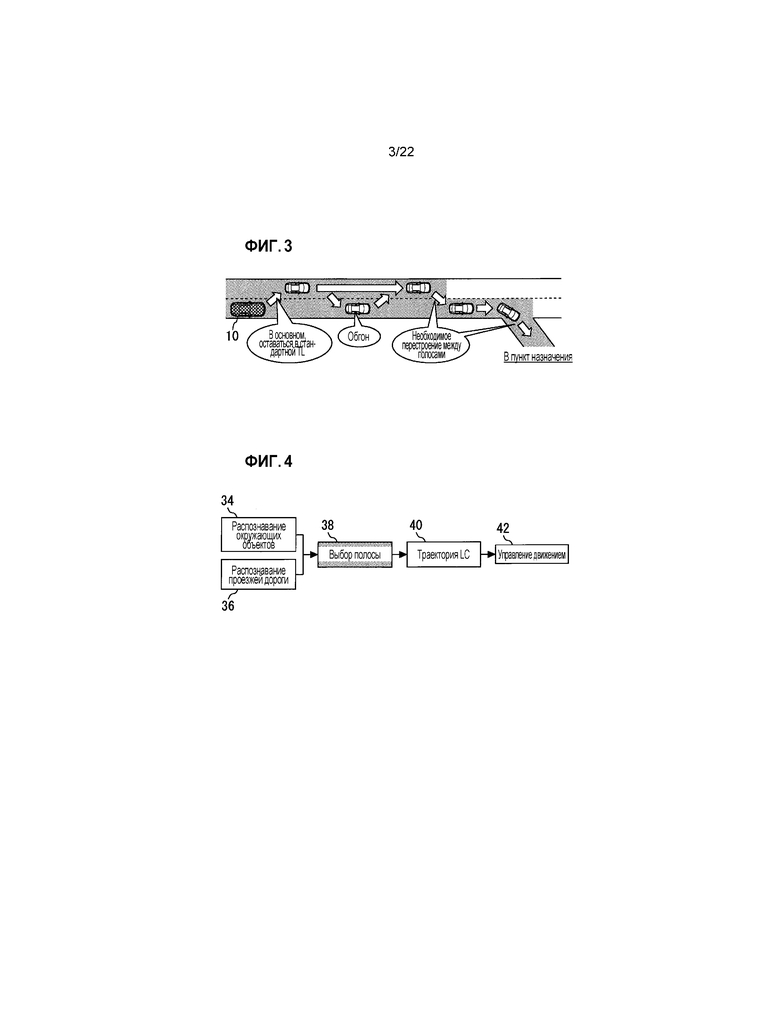
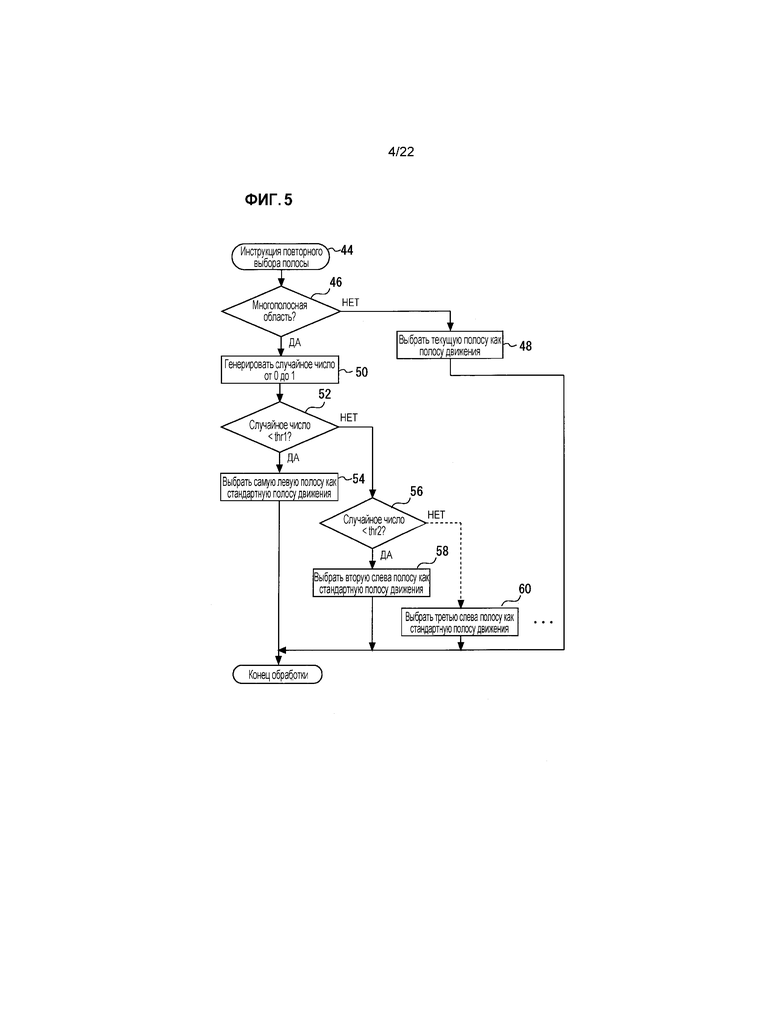
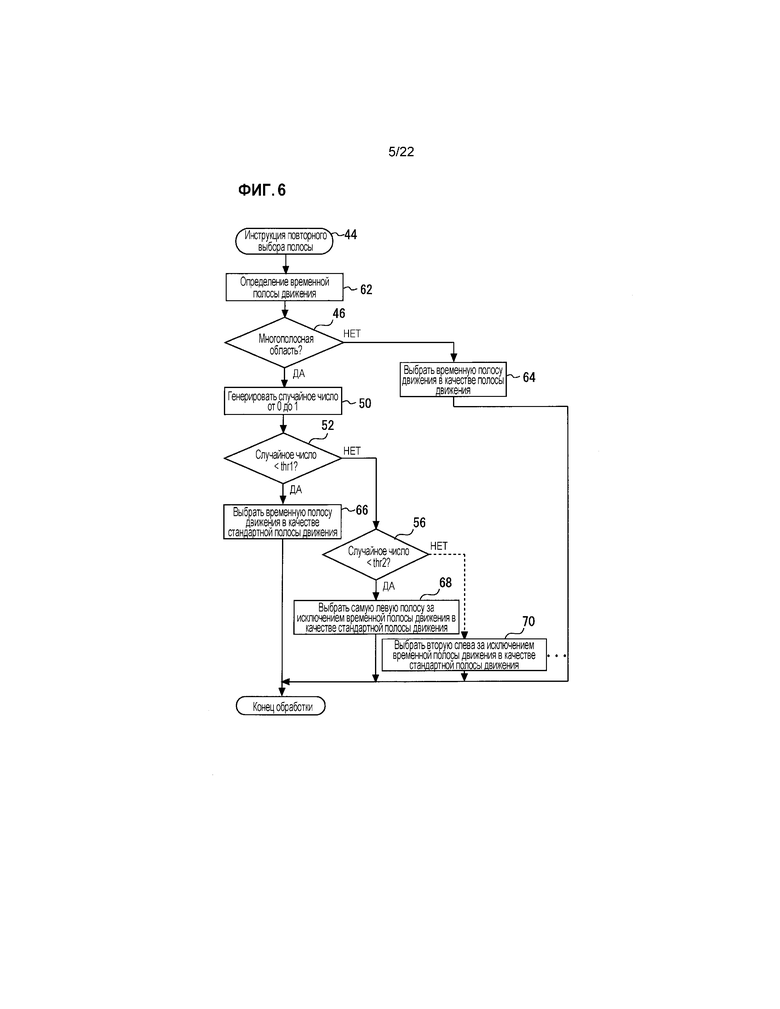
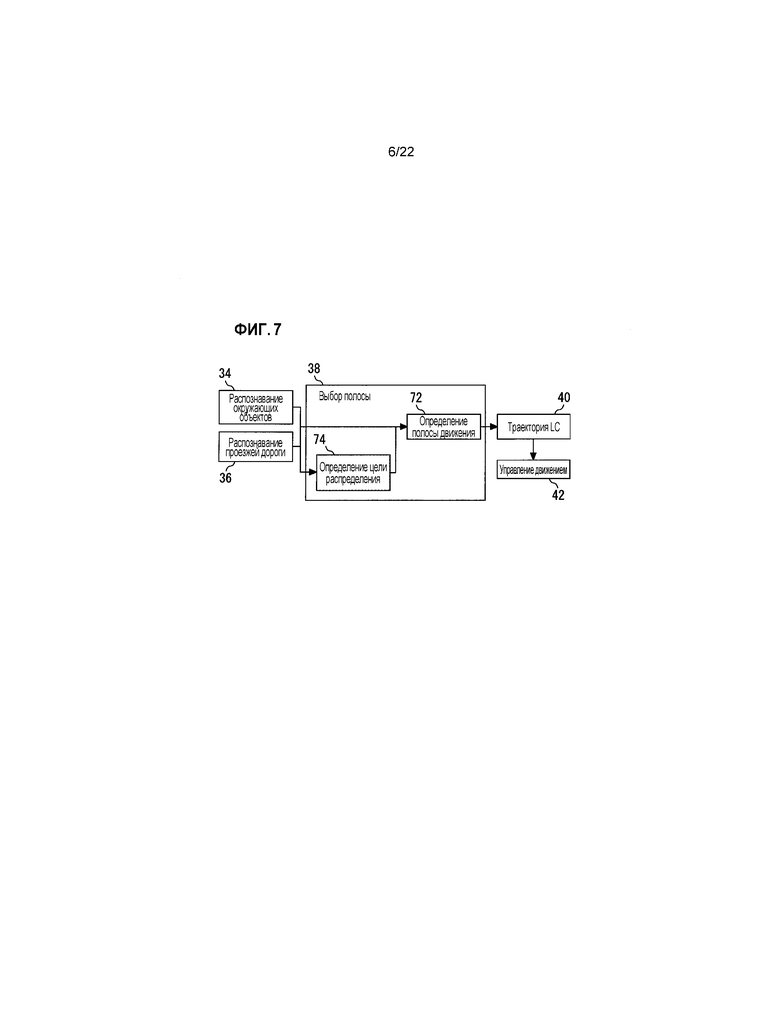
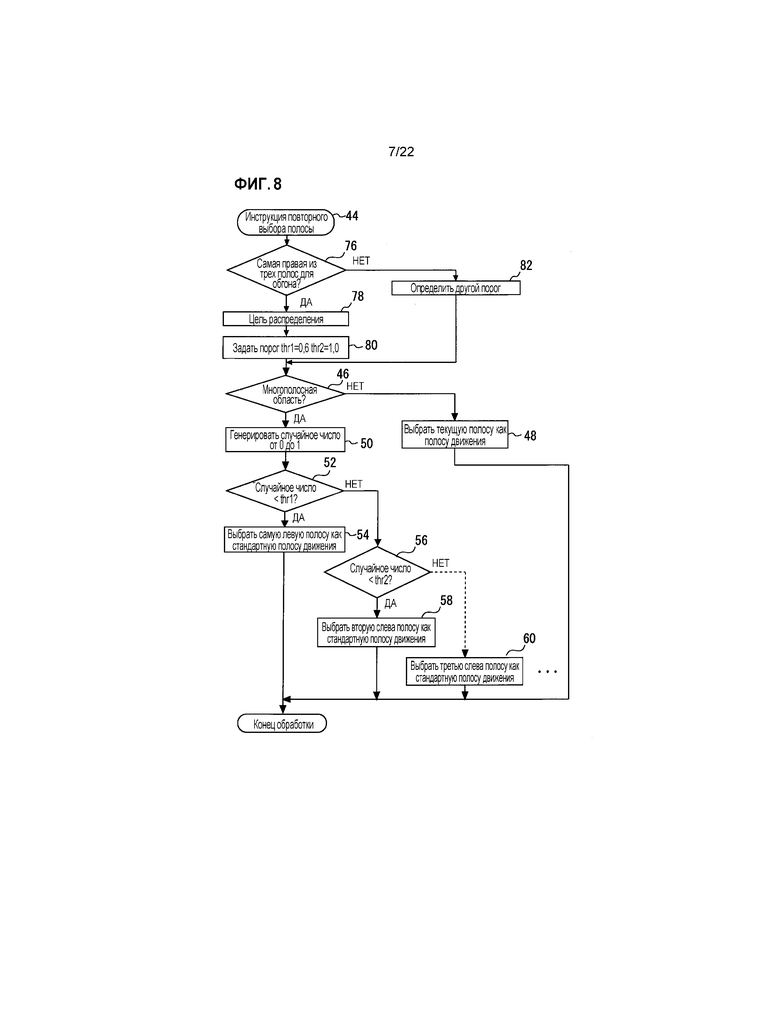
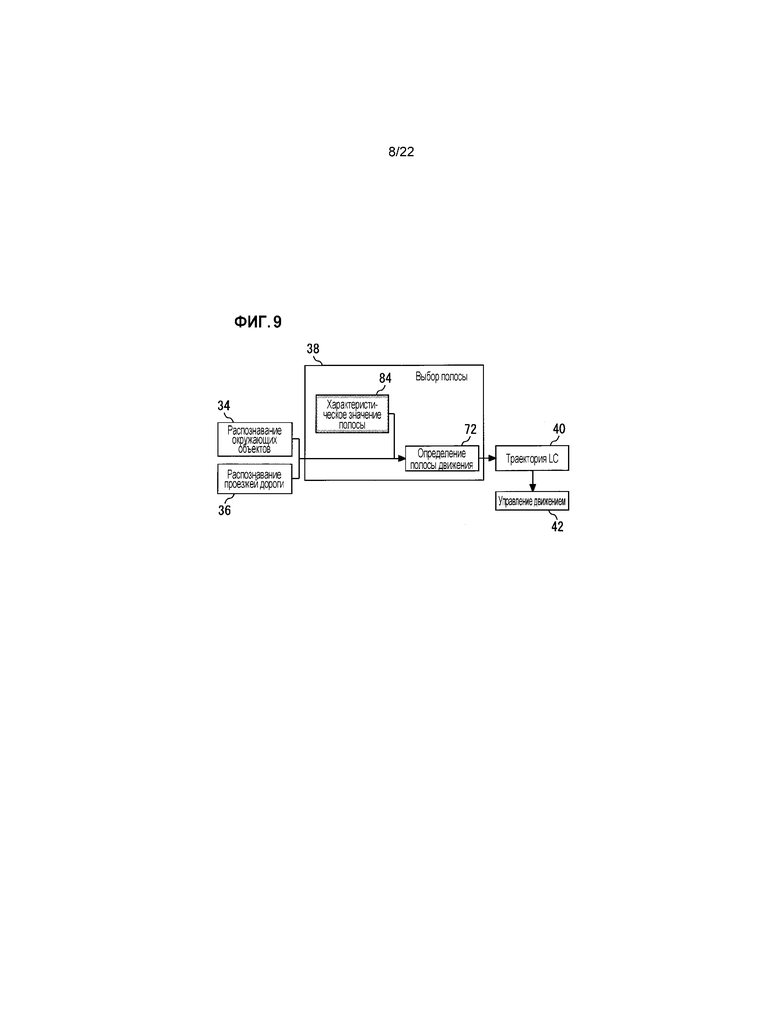
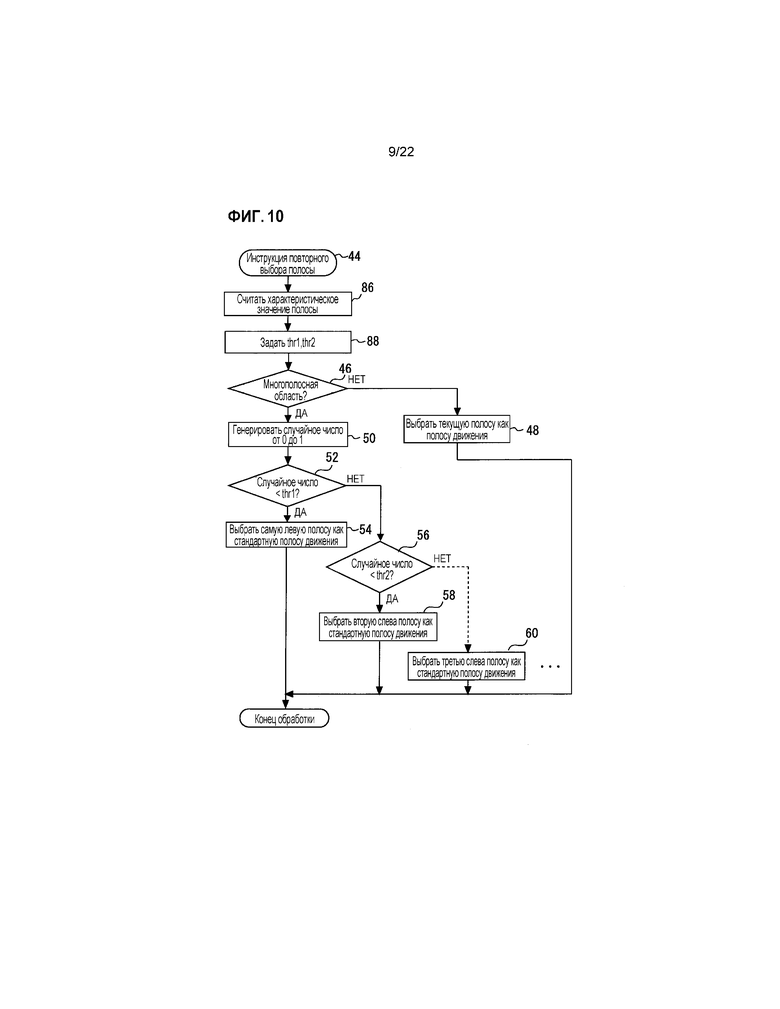
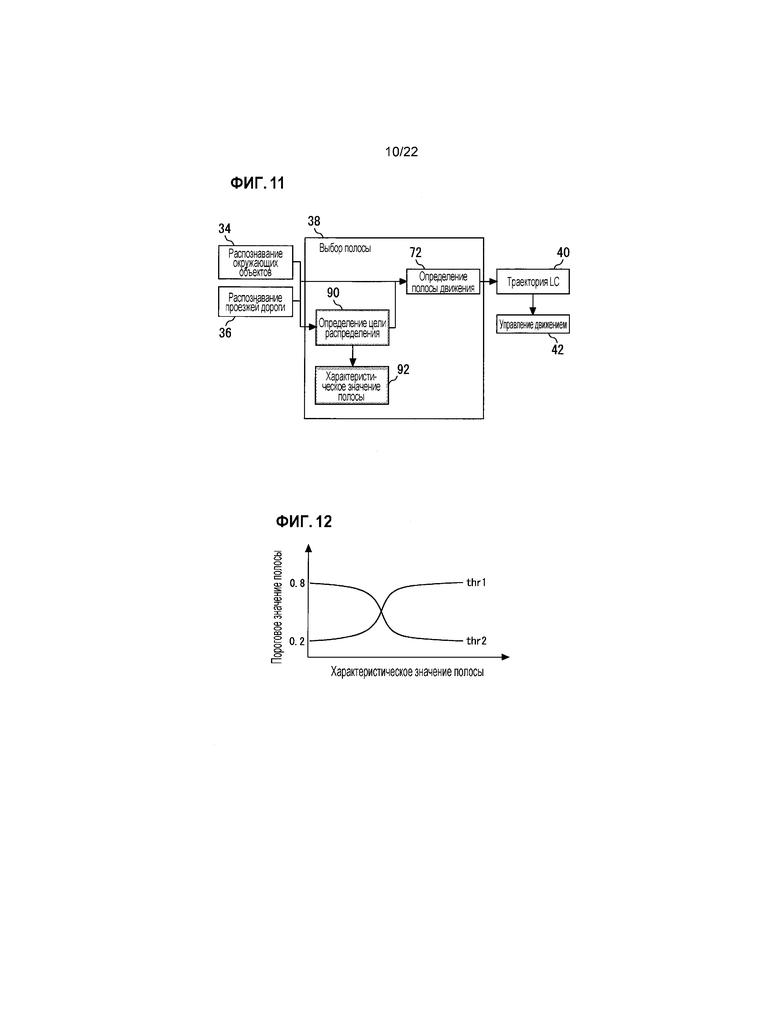
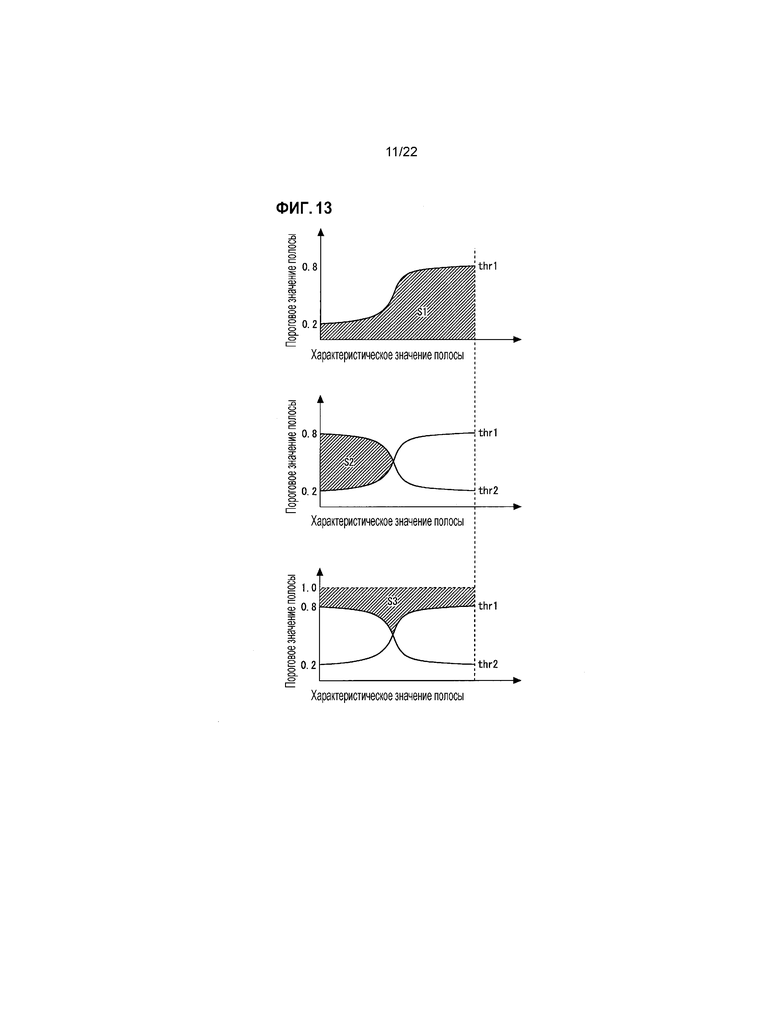
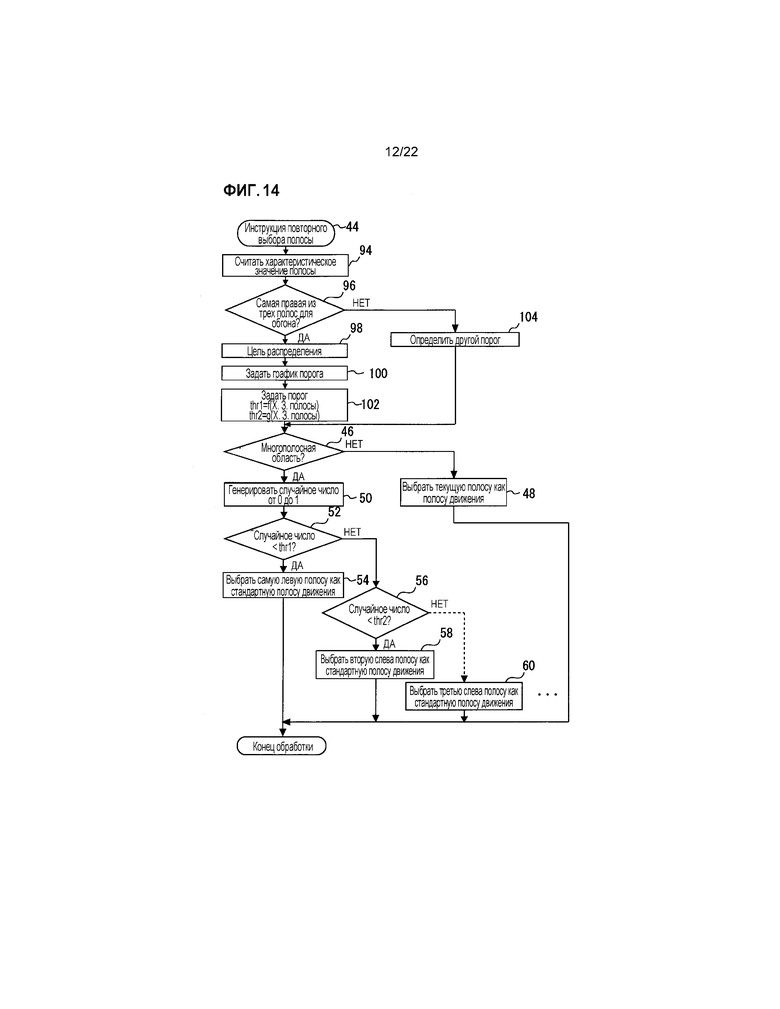
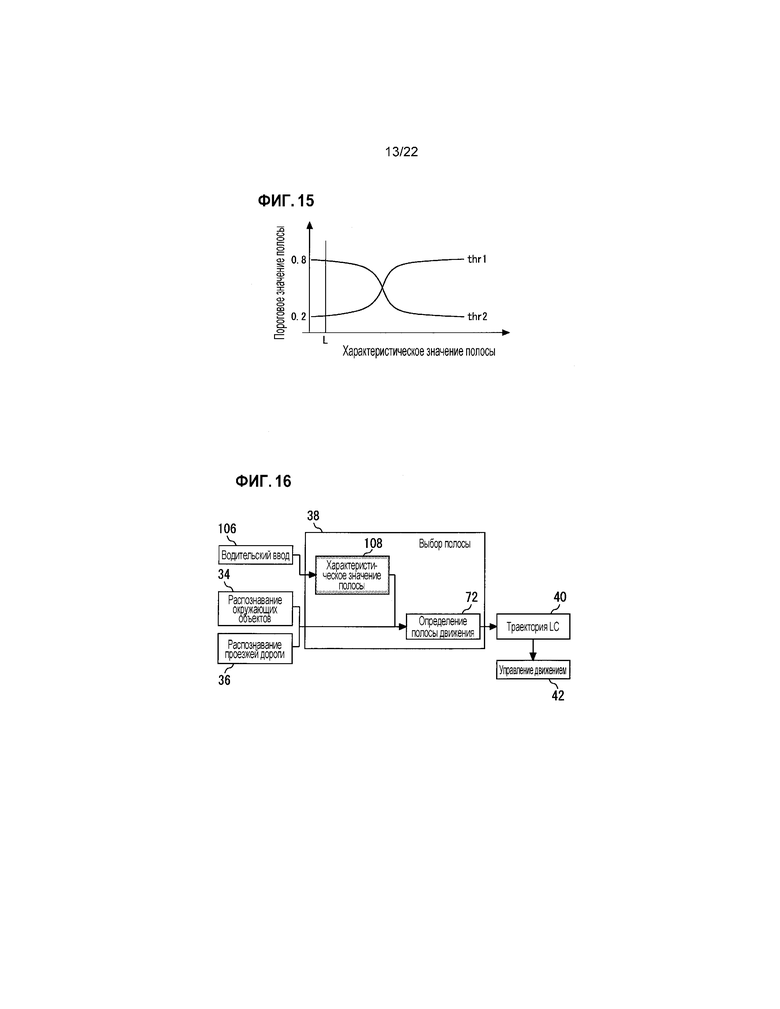
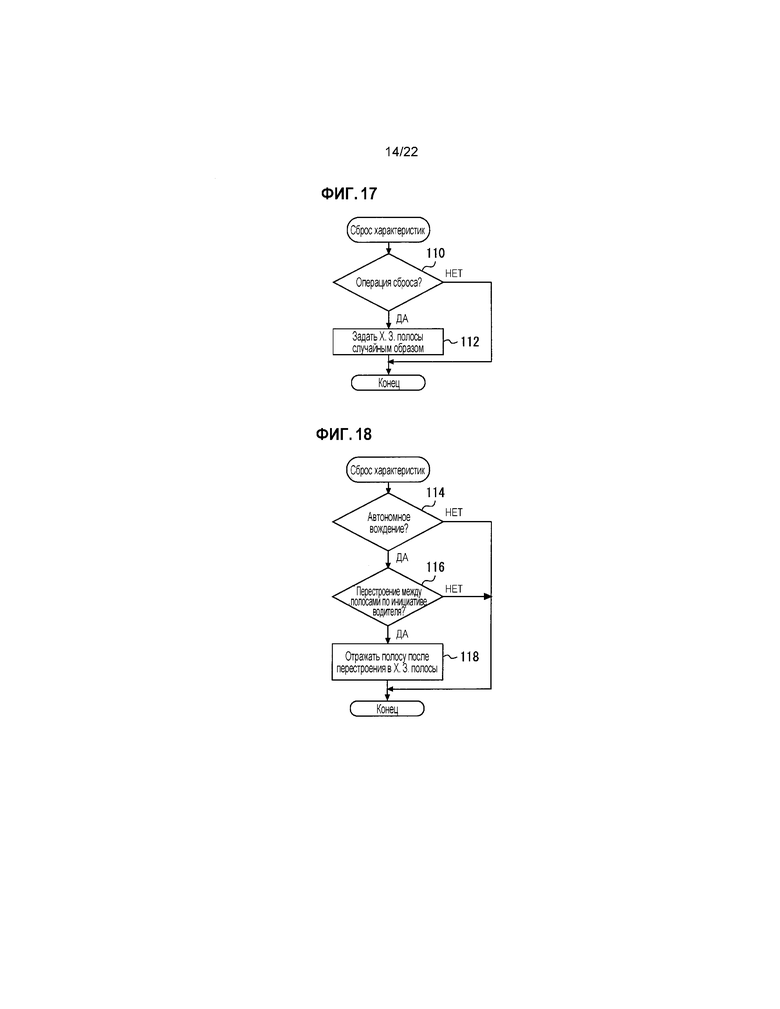
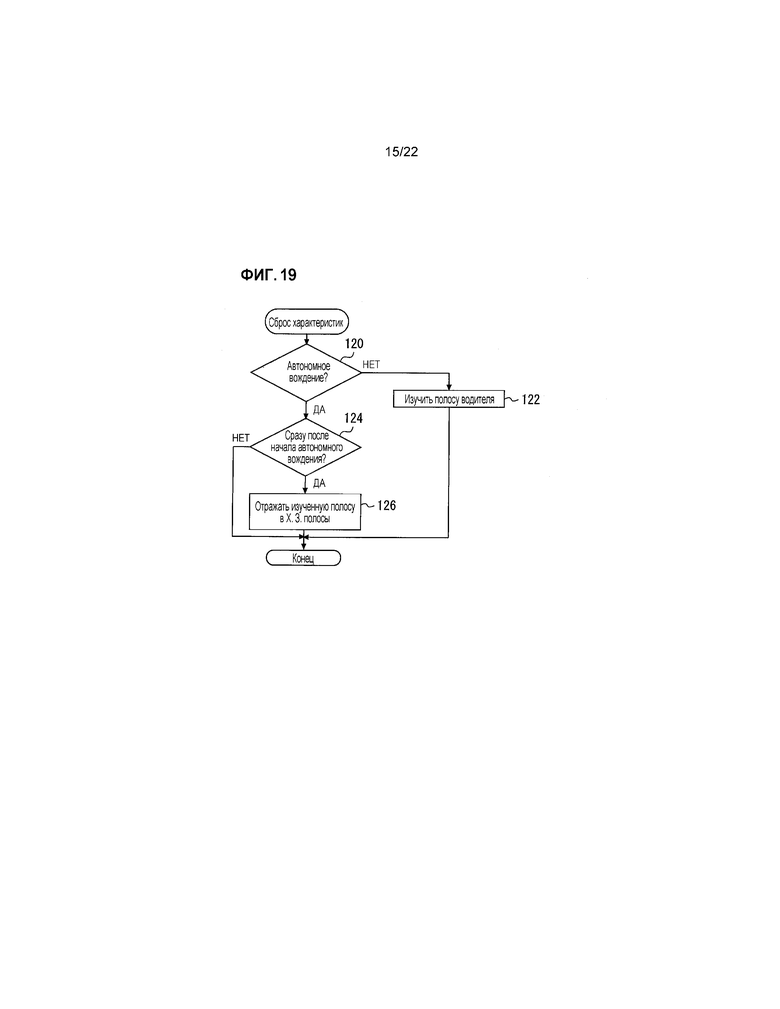
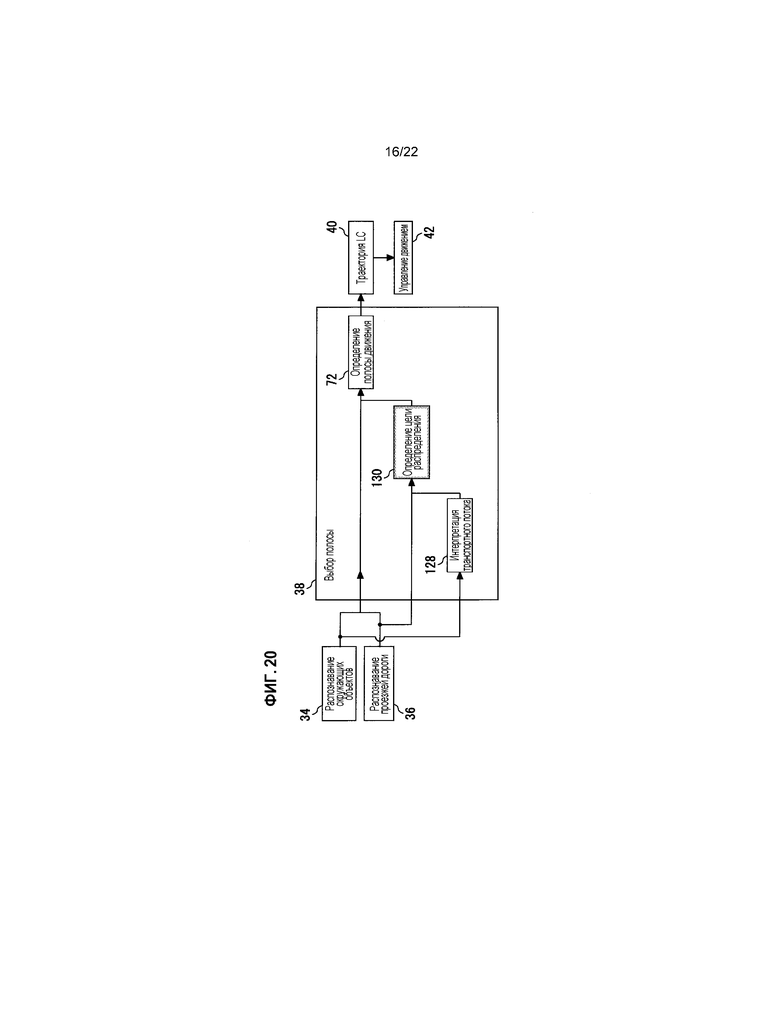
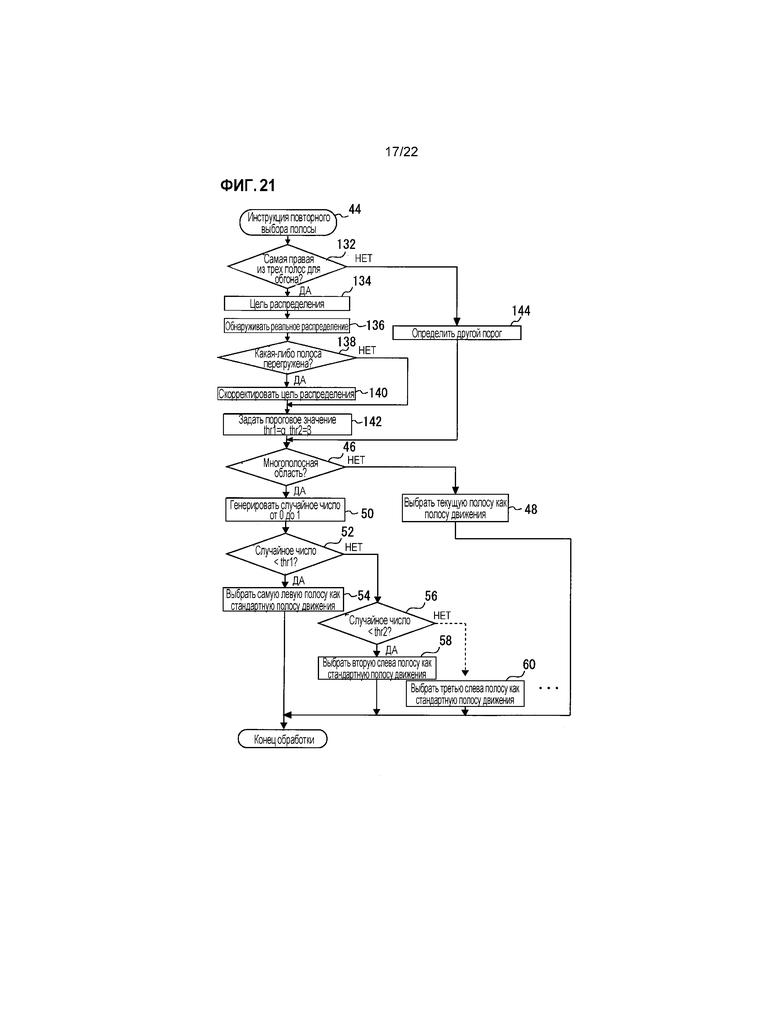
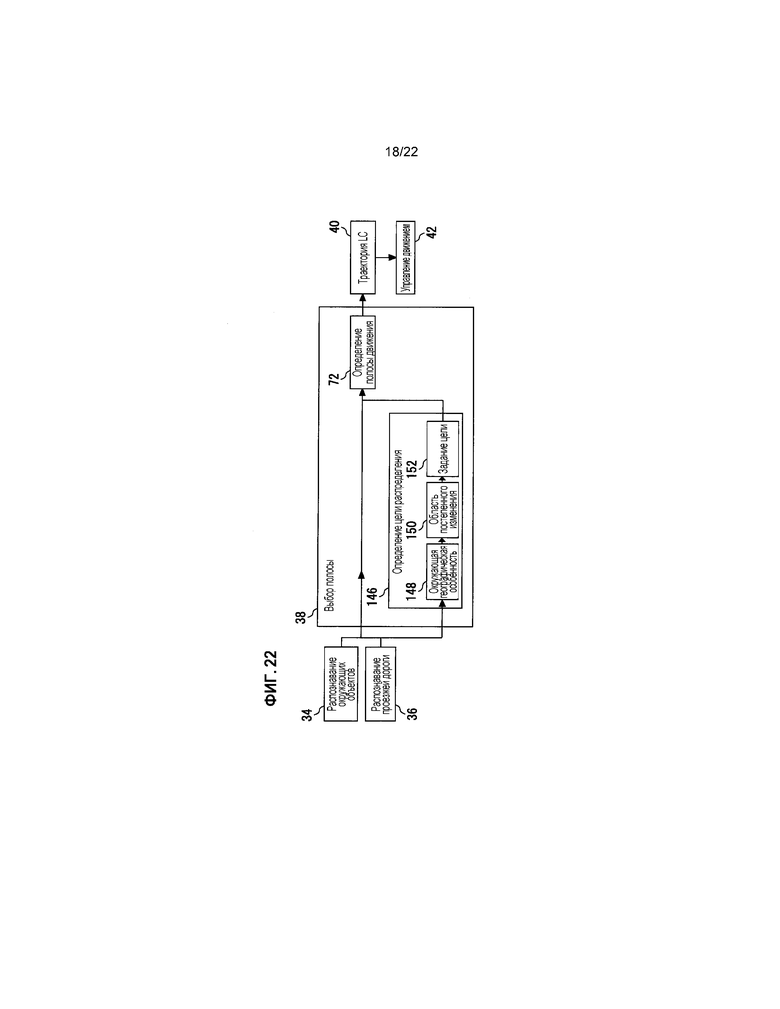
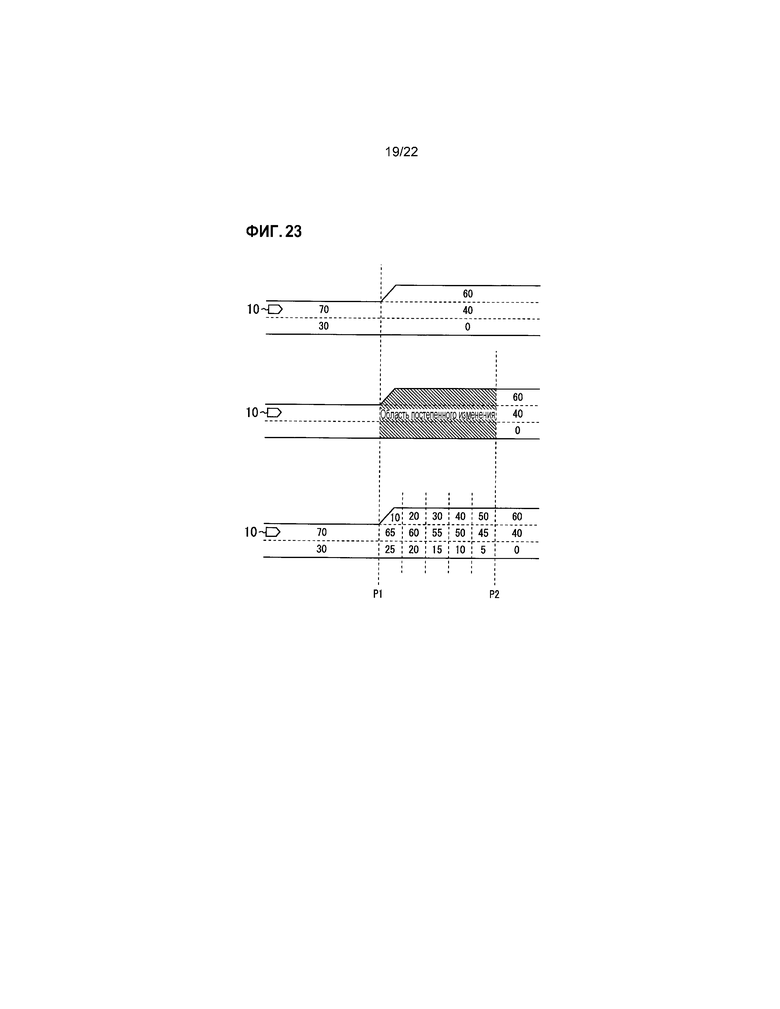
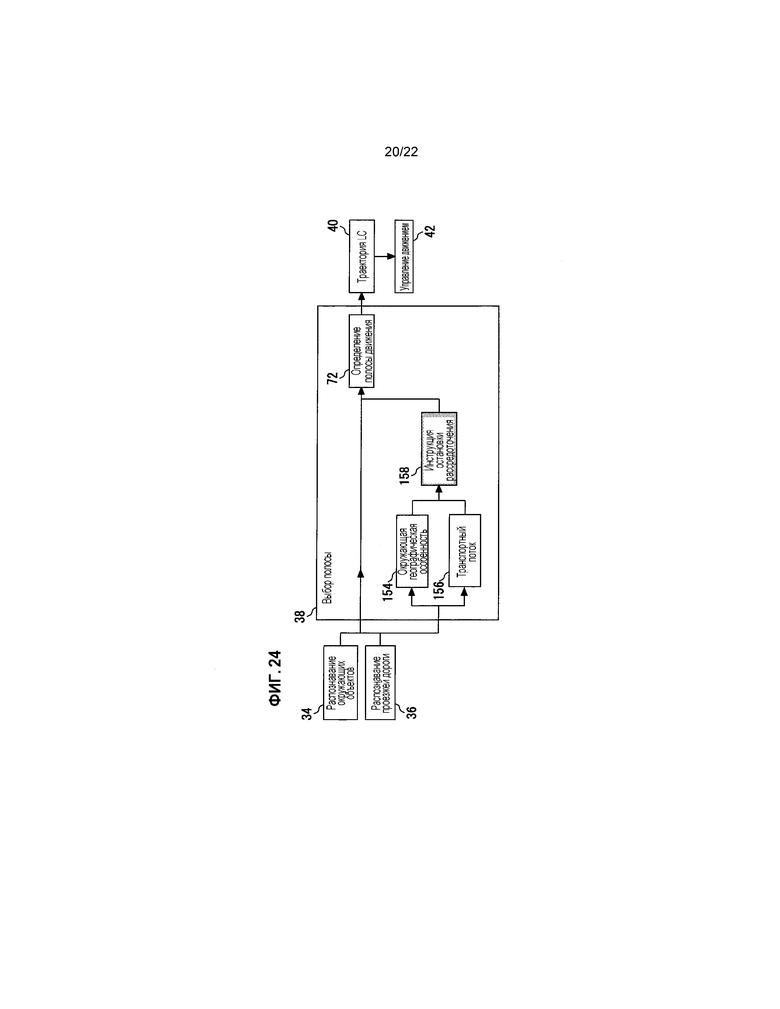
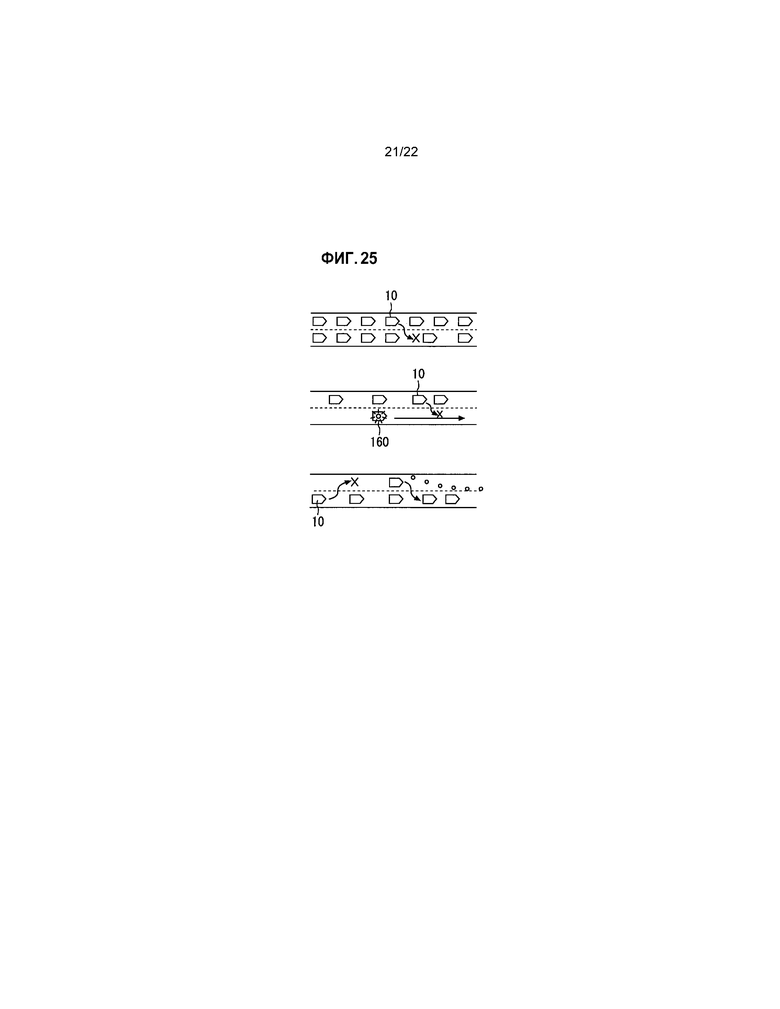
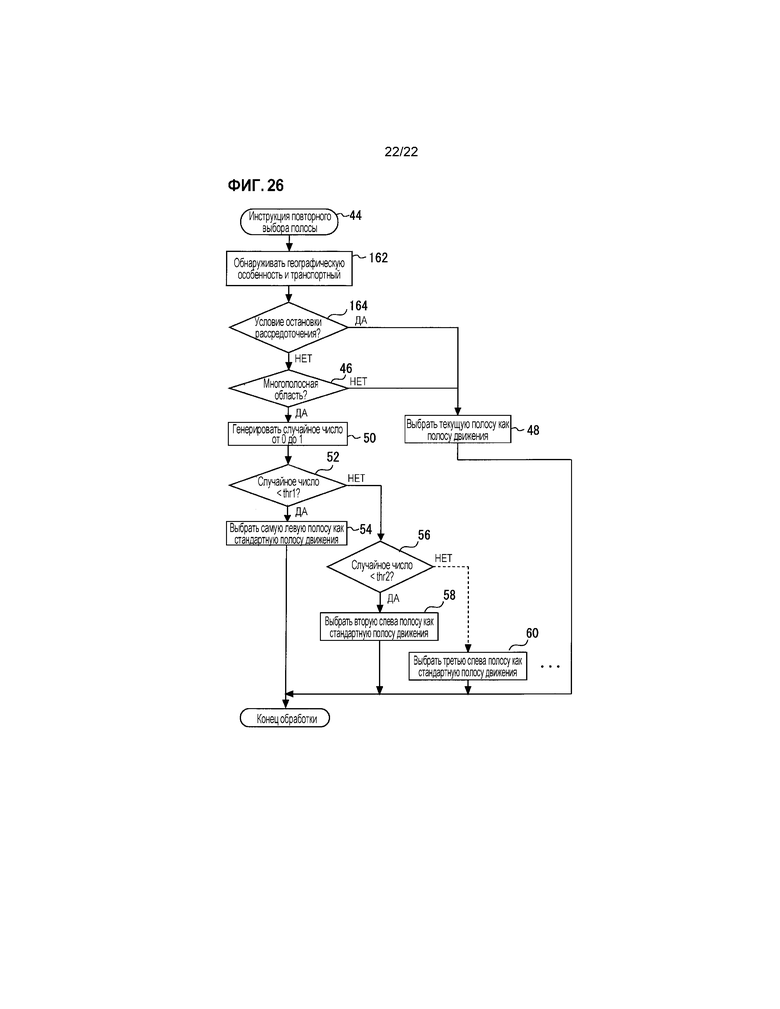
Настоящее изобретение относится к системе автономного вождения и транспортному средству автономного вождения. В частности, варианты осуществления настоящего изобретения относятся к системе автономного вождения, реализованной множеством транспортных средств автономного вождения, и транспортному средству автономного вождения, пригодному в качестве компонента системы. Система автономного вождения содержит множество транспортных средств автономного вождения. Каждое транспортное средство системы содержит устройство управления, которое задает проезжую область, где транспортное средство может двигать в процессе перемещения в пункт назначения, и определяет одну полосу движения как стандартную в многополосной области. Многополосная область включает две или более полос в проезжей области. Также упомянутые устройства управления, установленные на отдельных транспортных средствах системы, сконфигурированы так, что происходит рассредоточение на стандартные полосы движения. Множество транспортных средств системы определяет стандартные полосы в той же многополосной области, находящейся в той же среде. Повышается комфорт при движении транспортного средства. 3 н. и 23 з.п. ф-лы, 26 ил.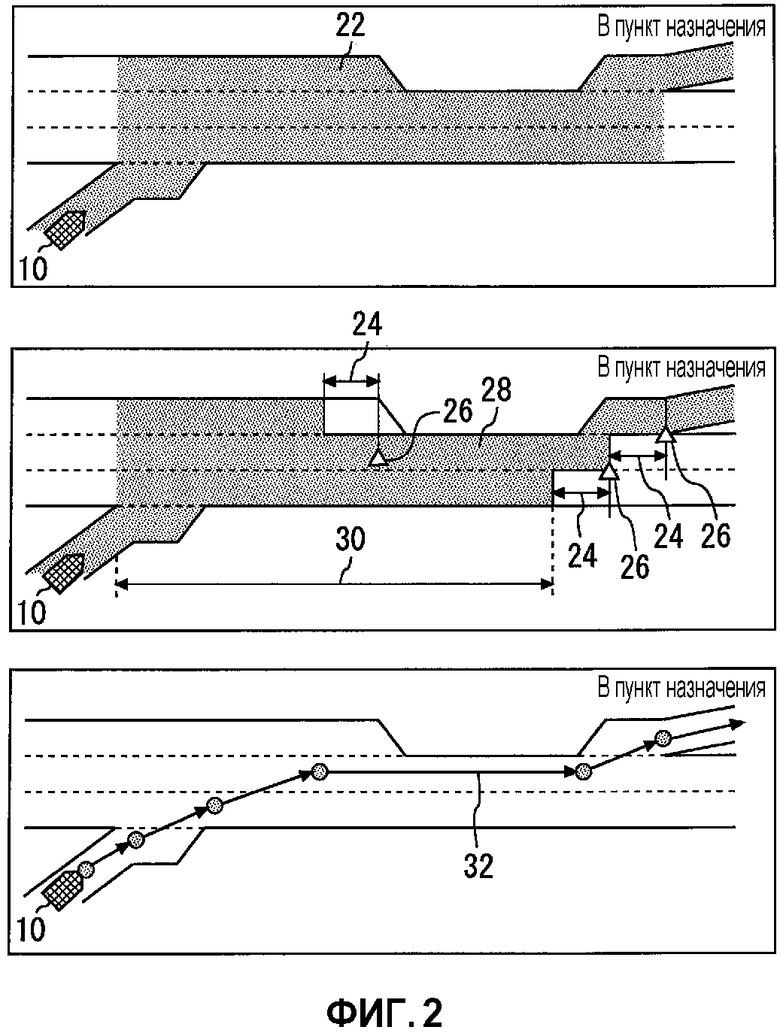
1. Система автономного вождения, включающая в себя множество транспортных средств автономного вождения,
в которой каждое из транспортных средств автономного вождения содержит
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области, и
упомянутые устройства управления, установленные на отдельных транспортных средствах автономного вождения, сконфигурированы таким образом, что происходит рассредоточение на стандартные полосы движения, которые множество транспортных средств автономного вождения определяет в одной и той же многополосной области, находящейся в одной и той же среде.
2. Система автономного вождения по п. 1, в которой устройство управления выполняет
обработку генерации случайных чисел,
обработку считывания пороговых значений полос, и
обработку определения полосы определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
3. Система автономного вождения по п. 2, в которой обработка определения полосы содержит
обработку определения временной полосы движения в многополосной области на основании информации, касающейся движения транспортного средства, и
обработку определения, задавать ли временную полосу движения как стандартную полосу движения, или задавать полосу, отличную от временной полосы движения, как стандартную полосу движения, на основании сравнения случайных чисел и пороговых значений полос.
4. Система автономного вождения по п. 2, в которой устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания пороговых значений полос в соответствии с целями распределения.
5. Система автономного вождения по п. 1, в которой
устройство управления сохраняет характеристическое значение полосы и определяет стандартную полосу движения на основании характеристического значения полосы, и
характеристические значения полос, хранящиеся в соответствующем множестве транспортных средств автономного вождения, имеют рассредоточение.
6. Система автономного вождения по п. 5, в которой устройство управления выполняет
обработку генерации случайных чисел,
обработку задания пороговых значений, состоящую в задании пороговых значений полос на основании характеристического значения полосы, и
обработку определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
7. Система автономного вождения по п. 6, в которой устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания такого соотношения между характеристическим значением полосы и пороговым значением полосы, которое позволяет реализовать цели распределения, когда характеристическое значение полосы рассредоточено по всему диапазону участка изменения, и
задание пороговых значений полос путем применения характеристического значения полосы собственного транспортного средства к соотношению, при обработке задания пороговых значений.
8. Система автономного вождения по п. 5, в которой устройство управления выполняет
обработку задания пороговых значений, состоящую в задании пороговых значений полос, которые совместно используются во множестве транспортных средств автономного вождения, и
обработку определения стандартной полосы движения на основании сравнения пороговых значений полос и характеристического значения полосы.
9. Система автономного вождения по п. 8, в которой
устройство управления выполняет обработку задания целей распределения транспортных средств в многополосной области, и
обработка задания пороговых значений включает в себя обработку задания пороговых значений полос в соответствии с целями распределения.
10. Система автономного вождения по п. 5, в которой устройство управления выполняет
обработку обнаружения характеристики, касающейся выбора полосы водителя транспортного средства, и
обработку отражения характеристики в характеристическом значении полосы.
11. Система автономного вождения по п. 4, в которой устройство управления выполняет
обработку получения реального распределения транспортных средств в многополосной области, и
обработку коррекции пороговых значений полос, благодаря чему реальное распределение транспортных средств приближается к целям распределения.
12. Система автономного вождения по п. 4, в которой устройство управления выполняет
обработку извлечения точки изменения, где цели распределения изменяются на маршруте к пункту назначения,
обработку задания одной секции в многополосной области, включающей в себя точку изменения, как области постепенного изменения, и
обработку постепенного изменения целей распределения в области постепенного изменения от распределения до изменения к распределению после изменения.
13. Система автономного вождения по п. 1, в которой устройство управления выполняет
обработку обнаружения явления рекомендации не производить перестроение, в котором рекомендуется оставаться в полосе, и
обработку определения стандартной полосы движения в режиме, в котором множество транспортных средств автономного вождения, находящихся в одной и той же среде, вынуждены принимать одно и то же решение, когда обнаружено явление рекомендации не производить перестроение.
14. Транспортное средство автономного вождения, имеющее функцию осуществления автономного движения к пункту назначения, содержащее:
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области,
причем устройство управления сконфигурировано таким образом, что происходит рассредоточение на стандартную полосу движения, которая определяется в одной и той же многополосной области, находящейся в одной и той же среде.
15. Транспортное средство автономного вождения по п. 14, в котором устройство управления выполняет
обработку генерации случайных чисел,
обработку считывания пороговых значений полос, и
обработку определения полосы определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
16. Транспортное средство автономного вождения по п. 15, в котором обработка определения полосы содержит
обработку определения временной полосы движения в многополосной области на основании информации, касающейся движения транспортного средства, и
обработку определения, задавать ли временную полосу движения как стандартную полосу движения, или задавать полосу, отличную от временной полосы движения, как стандартную полосу движения, на основании сравнения случайных чисел и пороговых значений полос.
17. Транспортное средство автономного вождения по п. 15, в котором устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания пороговых значений полос в соответствии с целями распределения.
18. Транспортное средство автономного вождения, имеющее функцию осуществления автономного движения к пункту назначения, содержащее:
устройство управления, которое задает проезжую область, где транспортное средство автономного вождения может двигаться в процессе перемещения в пункт назначения, и определяет одну полосу как стандартную полосу движения в многополосной области, включающей в себя две или более полос в проезжей области,
причем устройство управления сконфигурировано таким образом, что вероятность того, что каждая из отдельных полос будет определена как стандартная полоса движения в одной и той же многополосной области, находящейся в одной и той же среде, принимает фиксированное значение кроме 100% для каждой из полос.
19. Транспортное средство автономного вождения по п. 18, в котором устройство управления
сохраняет характеристическое значение полосы, и
выполняет
обработку генерации случайных чисел,
обработку задания пороговых значений, состоящую в задании пороговых значений полос на основании характеристического значения полосы, и
обработку определения стандартной полосы движения на основании сравнения случайных чисел и пороговых значений полос.
20. Транспортное средство автономного вождения по п. 19, в котором устройство управления выполняет
обработку задания целей распределения транспортных средств в многополосной области, и
обработку задания такого соотношения между характеристическим значением полосы и пороговыми значениями полос, которое позволяет реализовать цели распределения, когда характеристическое значение полосы рассредоточено по всему диапазону участка изменения, и
задает пороговые значения полос путем применения характеристического значения полосы транспортного средства к соотношению, при обработке задания пороговых значений.
21. Транспортное средство автономного вождения по п. 18, в котором устройство управления
сохраняет характеристическое значение полосы, и
выполняет
обработку задания пороговых значений, состоящую в задании пороговых значений полос, соответствующих соответствующим полосам многополосной области, и
обработку определения стандартной полосы движения на основании сравнения пороговых значений полос и характеристического значения полосы.
22. Транспортное средство автономного вождения по п. 21, в котором
устройство управления выполняет обработку задания целей распределения транспортных средств в многополосной области, и
обработка задания пороговых значений включает в себя обработку задания порогового значения полосы в соответствии с целями распределения.
23. Транспортное средство автономного вождения по п. 19, в котором устройство управления выполняет
обработку обнаружения характеристики, касающейся выбора полосы водителя собственного транспортного средства, и
обработку отражения характеристики в характеристическом значении полосы.
24. Система автономного вождения по п. 17, в которой устройство управления выполняет
обработку получения реального распределения транспортных средств в многополосной области, и
обработку коррекции пороговых значений полос, благодаря чему реальное распределение транспортных средств приближается к целям распределения.
25. Транспортное средство автономного вождения по п. 17, в котором устройство управления выполняет
обработку извлечения точки изменения, где цели распределения изменяются на маршруте к пункту назначения,
обработку задания одной секции в многополосной области, включающей в себя точку изменения, как области постепенного изменения, и
обработку постепенного изменения целей распределения в области постепенного изменения от распределения до изменения к распределению после изменения.
26. Транспортное средство автономного вождения по п. 14, в котором устройство управления выполняет
обработку обнаружения явления рекомендации не производить перестроение, в котором рекомендуется оставаться в полосе, и
обработку определения стандартной полосы движения в режиме, в котором одно и то же решение принимается в одной и той же среде, когда обнаружено явление рекомендации не производить перестроение.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2011 |
|
RU2567706C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ТРАНСПОРТНЫХ ПОТОКОВ НА МАГИСТРАЛИ, ПЕРЕСЕКАЕМОЙ ПОТОКАМИ АВТОМОБИЛЕЙ, ДВИЖУЩИХСЯ В ПОПЕРЕЧНОМ НАПРАВЛЕНИИ | 2009 |
|
RU2422907C2 |

