ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к электронной системе управления для управления спусковой аппарелью с изменяемой конфигурацией судна-трубоукладчика для укладки подводного трубопровода на дно водоема.
УРОВЕНЬ ТЕХНИКИ
Спусковые аппарели судов-трубоукладчиков обычно имеют конструкцию с изменяемой конфигурацией. То есть спусковая аппарель обычно содержит некоторое количество сегментов, сочлененных друг с другом и с судном-трубоукладчиком, и некоторое количество опор трубопровода. Позиция каждого сегмента является регулируемой в отношении судна-трубоукладчика и/или других сегментов, и каждая опора устанавливается на один из сегментов с регулировкой, для минимизации сил, передаваемых на трубопровод, и для определения конфигурации трубопровода, выполненного для минимизации напряжения, вызванного в трубопроводе. Спусковая аппарель этого типа описывается в заявке на патент заявителя WO 2011/086100 А2. При укладке трубопровода конфигурация спусковой аппарели обычно незначительно изменяется для приспособления к изменению внешних условий или к эксплуатационным параметрам судна-трубоукладчика. Когда работа по укладке трубопровода останавливается из-за плохой погоды, трубопровод оставляется на дне водоема, и спусковая аппарель устанавливается в безопасную конфигурацию над водой.
Когда топография дна, вдоль которого трубопровод должен быть проложен, изменяется значительно, конфигурация спусковой аппарели широко изменяется между первой и второй рабочими конфигурациями. В этой связи важно помнить, что трасса, вдоль которой укладывается трубопровод, определяется заблаговременно, и продолжается в пределах коридора укладки, то есть теоретической полосы вдоль дна водоема. Для предотвращения перенапряжения трубопровода обычно он оставляется на дне водоема до изменения конфигурации спусковой аппарели.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей данного изобретения является обеспечение электронной системы управления для управления спусковой аппарелью судна-трубоукладчика для укладки подводного трубопровода на дно водоема, где электронная система управления позволяет осуществить изменение конфигурации спусковой аппарели между первой и второй рабочими конфигурациями без оставления трубопровода на дне, в то же время поддерживая приемлемое вызванное напряжение в трубопроводе.
Согласно данному изобретению обеспечивается электронная система управления для управления спусковой аппарелью с изменяемой конфигурацией, судна-трубоукладчика, для укладки подводного трубопровода на дно водоема; причем электронная система управления выполнена с возможностью: обработки данных, относящихся к спусковой аппарели, данных, относящихся к судну-трубоукладчику, и данных относящихся к напряжению, вызванному в трубопроводе; генерации множества последовательностей шагов для изменения конфигурации спусковой аппарели от первой ко второй рабочей конфигурации; и выбора наилучшей (оптимальной) последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе, в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями.
Система согласно данному изобретению обеспечивает выбор последовательности шагов, выполненной наилучшим образом для поддержания приемлемого вызванного напряжения в трубопроводе. Действие по шагам также облегчает контроль изменений, вызванных измененной конфигурацией спусковой аппарели.
Таким образом, электронная система управления предпочтительно выполнена с возможностью передачи команд спусковой аппарели для осуществления по меньшей мере одного шага в оптимальной последовательности шагов. При работе таким образом, проверки, как описано ниже, могут быть выполнены после выполнения этого шага в оптимальной последовательности шагов.
В предпочтительном варианте осуществления данного изобретения, электронная система управления выполнена с возможностью назначения на каждом шаге в оптимальной последовательности шагов оцененных значений, относящихся к промежуточной конфигурации спусковой аппарели; сбора данных, относящихся к конфигурации спусковой аппарели в промежуточной конфигурации, и соответствующих оцененным значениям; и сравнения оцененных значений с собранными данными.
Оцененные значения, назначенные на каждом шаге, являются значениями, относящимися к конфигурации спусковой аппарели, и рассчитываются до того, как спусковая аппарель устанавливается в конкретную конфигурацию, тогда как собранные данные являются данными, относящимися к конфигурации спусковой аппарели, и собираются, когда спусковая аппарель фактически находится в конкретной конфигурации.
Оцененные значения и собранные данные являются однородными и поэтому сравнимыми. Для их сравнения оцененные значения и собранные данные обычно относятся к геометрической конфигурации спусковой аппарели и/или к силам, которыми обмениваются спусковая аппарель и трубопровод.
В зависимости от результата сравнения, электронная система управления решает, продолжать или нет осуществление оптимальной последовательности шагов. Более конкретно, электронная система управления выполнена с возможностью передачи команд для осуществления по меньшей мере одного дополнительного шага в оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, удовлетворяет заданным критериям приемлемости.
Электронная система управления также выполнена с возможностью блокировки осуществления дополнительных шагов в оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, не удовлетворяет заданным критериям приемлемости.
В этом случае должна быть определена новая стратегия для изменения конфигурации спусковой аппарели от промежуточной конфигурации ко второй рабочей конфигурации. Таким образом, электронная систем управления выполнена с возможностью генерации другого множества последовательностей шагов для изменения конфигурации спусковой аппарели от некоторой промежуточной конфигурации ко второй рабочей конфигурации; и выбора дополнительной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе в каждой промежуточной конфигурации между начальной промежуточной и второй рабочей конфигурациями.
Другими словами, предлагается дополнительная оптимальная последовательности шагов, выбранная с использованием тех же самых критериев, как и для предыдущей оптимальной последовательности шагов.
Способ оптимизации, использующийся для определения оптимальной последовательности шагов и любых дополнительных оптимальных последовательностей шагов, предпочтительно основывается на генетических алгоритмах.
То есть множество последовательностей шагов соответствует группе элементов, и каждая последовательность шагов соответствует некоторому элементу. Выбор обычно основывается на так называемой функции приспособленности, которая, в этом случае, предпочтительно относится к напряжению, вызванному в трубопроводе. При применении к каждому элементу/последовательности шагов, функция приспособленности назначает этой последовательности шагов количественный показатель и устраняет элементы с более низкими количественными показателями.
Остающиеся элементы/последовательности шагов объединяются с использованием технологии кроссинговера (кроссовера), которая в этом случае генерирует последовательность шагов нового поколения посредством объединения двух участков бывших последовательностей первого поколения. Технология замены также может быть использована в этом случае для генерации новых элементов.
Вообще говоря, напряжение, вызванное в трубопроводе, контролируется в реальном времени. Трубопровод подвергается значительному воздействию внешних сил, передаваемых посредством судна-трубоукладчика и спусковой аппарели, и преимущественно изгибного напряжения, произведенного конфигурацией трубопровода между судном-трубоукладчиком и дном водоема.
В предпочтительном варианте осуществления данного изобретения, электронная система управления выполнена с возможностью определения сил, передаваемых судном-трубоукладчиком и спусковой аппарелью на трубопровод.
Эти силы являются легко обнаруживаемыми с использованием датчиков, расположенных на опорах вдоль спусковой аппарели, и на натяжных устройствах для спуска трубопровода управляемым способом с судна-трубоукладчика.
В предпочтительном варианте осуществления данного изобретения, электронная система управления выполнена с возможностью расчета напряжения, вызванного в трубопроводе посредством конфигурации трубопровода между судном-трубоукладчиком и дном водоема.
Более конкретно, электронная система управления выполнена с возможностью расчета конфигурации трубопровода между судном-трубоукладчиком и дном водоема; определения конечноэлементной модели трубопровода; и расчета напряжения, вызванного в трубопроводе.
Управление трубопроводом в реальном времени разработано для указания напряжения, приближающегося к критическим уровням, и для информирования персонала о том, что могут быть предприняты соответствующие шаги для предотвращения превышения им критических уровней. Контроль напряжения, вызванного в трубопроводе, также обеспечивает эталонные параметры, посредством которых определяется функция приспособленности.
В предпочтительном варианте осуществления данного изобретения, электронная система управления содержит централизованную систему контроля, выполненную с возможностью сбора, контроля и запоминания обнаруживаемых данных, относящихся к спусковой аппарели и судну-трубоукладчику; и направляющую систему укладки, подключенную к централизованной системе контроля и выполненную с возможностью контроля в реальном времени напряжения, вызванного в трубопроводе.
Другими словами, архитектура электронной системы управления предпочтительно содержит две системы с различными функциями, взаимодействующие для обмена информацией.
В предпочтительном варианте осуществления данного изобретения, электронная система управления содержит управляющую систему спусковой аппарели, содержащую компьютерный планировщик, выполненный с возможностью осуществления программы оптимизации для определения оптимальной последовательности шагов, и компьютерный диспетчер для осуществления и проверки шагов.
Компьютерный планировщик подключен к направляющей системе укладки для сбора данных о напряжении, которые используются для определения функции приспособленности.
Компьютерный диспетчер подключен к централизованной системе контроля для сбора данных, относящихся к однородным характеристикам оцененных значений.
Эти оцененные значения предпочтительно включают в себя оцененные значения, относящиеся к конфигурации спусковой аппарели и/или к силам, которыми обмениваются спусковая аппарель и трубопровод.
Они могут также включать в себя напряжение, вызванное в трубопроводе.
В предпочтительном варианте осуществления данного изобретения электронная система управления выполнена с возможностью генерации первого количества последовательностей шагов с первым заданным шагом, и второго множества последовательностей шагов со вторым заданным шагом, для изменения конфигурации спусковой аппарели от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной первой и одной второй оптимальных последовательностей шагов как функций собранных данных и, соответственно, первого и второго множества последовательностей шагов, для минимизации напряжения, вызванного в трубопроводе в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями; причем первый заданный шаг больше, чем второй заданный шаг.
Поскольку первые заданные шаги являются большими, чем вторые заданные шаги, они, очевидно, изменяют конфигурацию спусковой аппарели быстрее, но первая оптимальная последовательности шагов, вероятно, производит большее напряжение в трубопроводе - или, во всяком случае, является более рискованной - чем вторая оптимальная последовательности шагов. В этом случае оператор должен решить, какую оптимальную последовательность шагов следует осуществить при этих обстоятельствах.
В предпочтительном варианте осуществления данного изобретения, электронная система управления связана со спусковой аппарелью, которая содержит множество взаимосоединенных сегментов с регулируемым наклоном, и множество регулируемых опор, установленных на эти сегменты. Каждый шаг в последовательности шагов соответствует перемещению сегмента и опоры.
Последовательность шагов является, следовательно, последовательностью перемещений сегментов и опор.
Другой задачей данного изобретения является обеспечение способа управления спусковой аппарелью с изменяемой конфигурацией, судна-трубоукладчика, для укладки трубопровода на дно водоема, и который позволяет осуществить значительные изменения конфигурации спусковой аппарели между первой и второй рабочими конфигурациями без оставления трубопровода на дне, и без избыточного напряжения в трубопроводе.
Согласно данному изобретению обеспечивается способ управления для управления спусковой аппарелью с изменяемой конфигурацией судна-трубоукладчика для укладки трубопровода на дно водоема; причем этот способ управления содержит этапы сбора данных, относящихся к конфигурации спусковой аппарели, данных, относящихся к судну-трубоукладчику, и данных, относящихся к напряжению, вызванному в трубопроводе; генерации множества последовательностей шагов для изменения конфигурации спусковой аппарели от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями.
Данное изобретение также включает в себя компьютерную программу, загружаемую непосредственно в память компьютера для выполнения этапов способа; и программный продукт, содержащий читаемый носитель данных, на котором программа хранится.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничивающий вариант осуществления данного изобретения будет описан в качестве примера со ссылкой на прилагаемые чертежи, в которых:
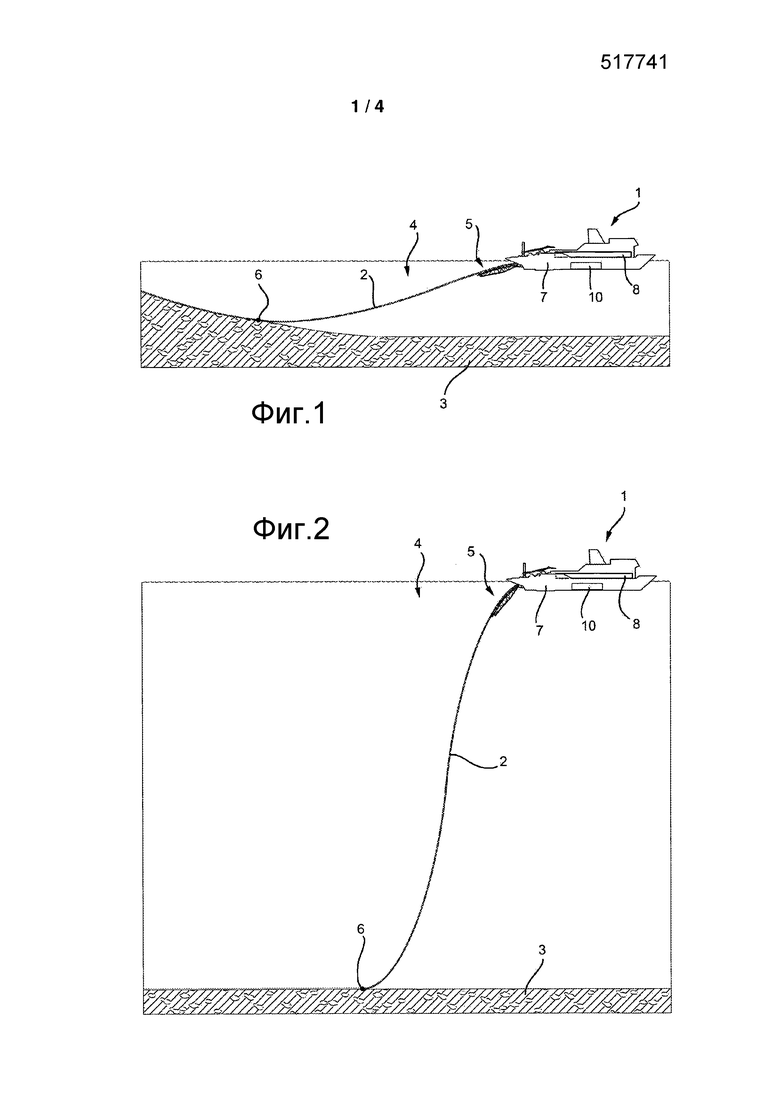
Фиг. 1 показывает вид сбоку, с частями, удаленными для ясности, судна-трубоукладчика со спусковой аппарелью в первой рабочей конфигурации для укладки трубопровода на дно водоема;
Фиг. 2 показывает вид сбоку, с частями, удаленными для ясности, судна-трубоукладчика с фиг. 1 со спусковой аппарелью во второй рабочей конфигурации для укладки подводного трубопровода;
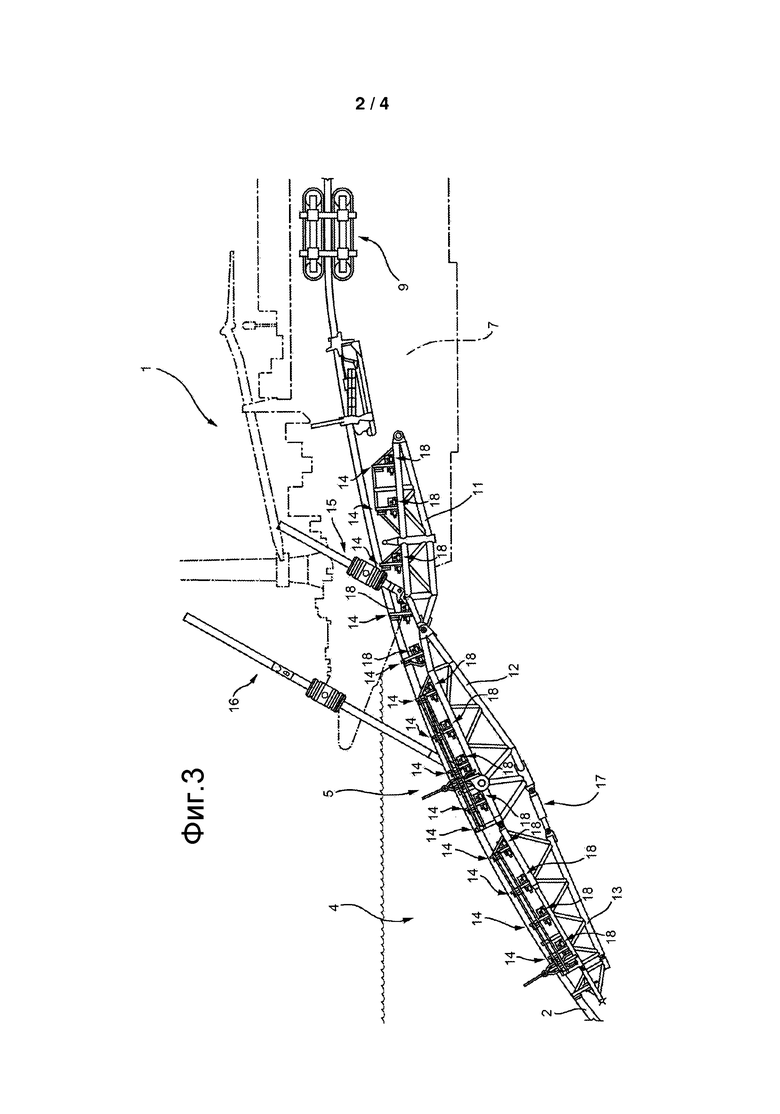
Фиг. 3 показывает вид сбоку в большем масштабе, с частями, удаленными для ясности, спусковой аппарели в первой рабочей конфигурации;
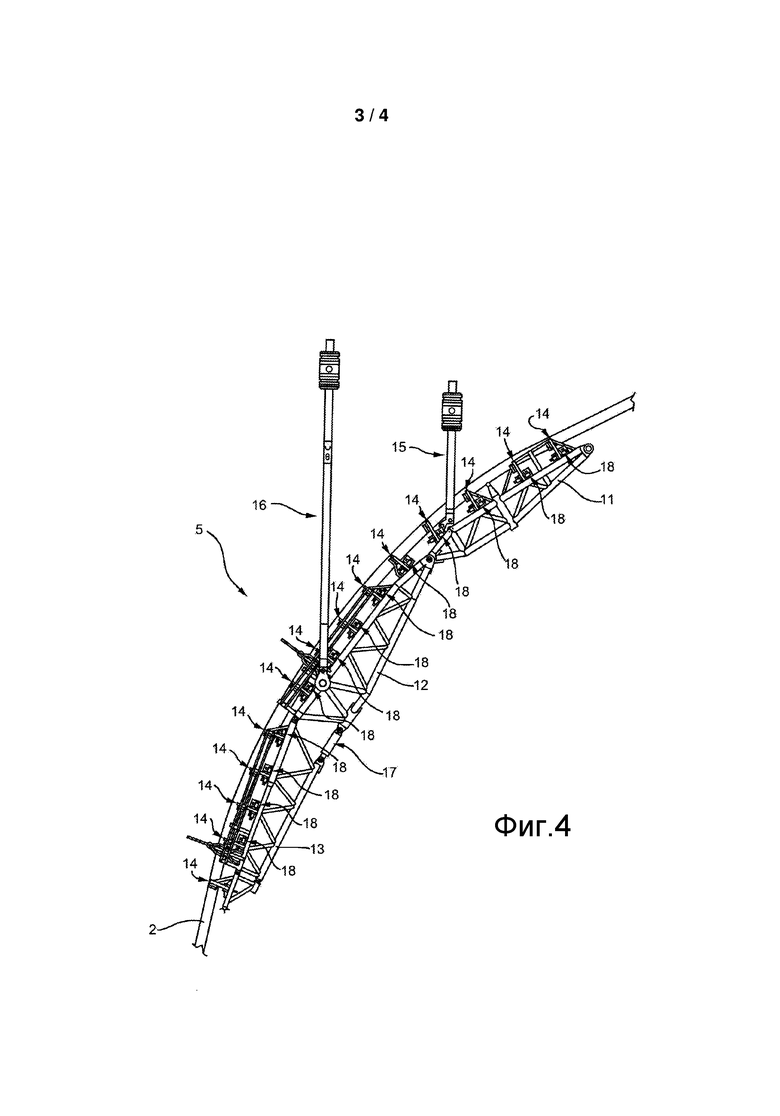
Фиг. 4 показывает вид сбоку, с частями, удаленными для ясности, спусковой аппарели с фиг. 1 во второй рабочей конфигурации;
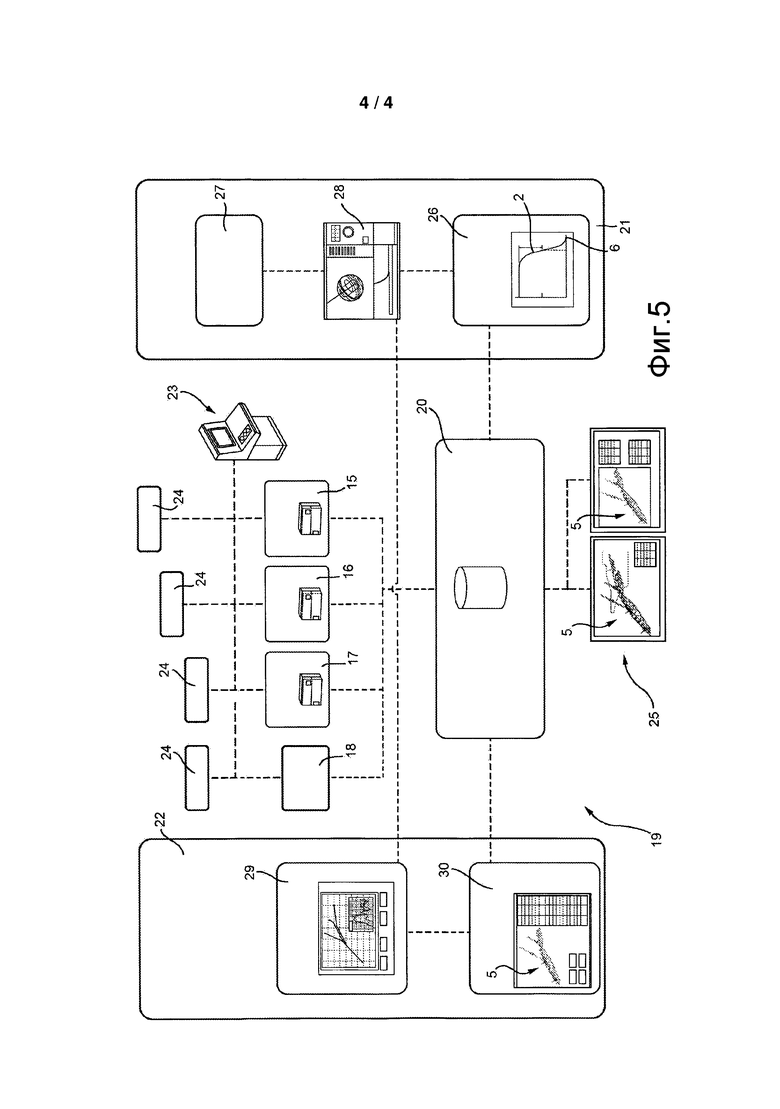
Фиг. 5 показывает схематичную блок-схему, с частями, удаленными для ясности, электронной системы управления для управления спусковой аппарелью.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Позиция 1 на фиг. 1 и 2 указывает на все судно-трубоукладчик для укладки трубопровода 2 на дно 3 водоема 4. Батиметрия дна 3 водоема 4 может изменяться от минимума вдоль береговой линии, до максимума, обычно далеко от берега. Планирование укладки трубопровода 2 на дно 3 содержит выбор наилучшей трассы на основе параметров проекта, для определения наилучшего курса следования судна-трубоукладчика 1 при укладке трубопровода 2. Судно-трубоукладчик 1 снабжено спусковой аппарелью 5 для направления трубопровода 2 при его укладке. Фиг. 1 и 2 показывают судно-трубоукладчик 1 в относительно мелкой и относительно глубокой воде соответственно. На фиг. 1, спусковая аппарель установлена в первую рабочую конфигурацию, характеризующуюся плавной кривой; на фиг. 2, она установлена во вторую рабочую конфигурацию, характеризующуюся кривой с малым радиусом кривизны.
На фиг. 1, конфигурация трубопровода 2 имеет по существу форму «S», постепенно наклоняясь между судном-трубоукладчиком 1 и дном 3, и характеризуется относительно малым углом выхода (относительно горизонтали) трубопровода 2 из спусковой аппарели 5. На фиг. 2, конфигурация трубопровода 2 имеет по существу форму резко наклоняющейся «S», характеризующейся относительно широким углом выхода трубопровода 2 из спусковой аппарели 5. Трубопровод 2 контактирует с дном в так называемой точке 6 касания дна (TDP), которая является важным параметром для обеспечения того, что трубопровод 2 действительно укладывается вдоль установленной наилучшей трассы, и для определения конфигурации трубопровода 2 между дном 3 и судном-трубоукладчиком 1.
СУДНО-ТРУБОУКЛАДЧИК
Со ссылкой на фиг. 1, судно-трубоукладчик 1 содержит плавучую конструкцию 7 и сборочную линию 8 для сборки трубных секций (не показаны) единичной длины в трубопровод 2. Сборочная линия 8 содержит оснащение (не показано) для подготовки и сварки концов трубных секций, и для нанесения покрытия на сваренные концы. Со ссылкой на фиг. 3, судно-трубоукладчик 1 содержит натяжное устройство 9 (только одно показано на фиг. 3) для захвата и спуска трубопровода 2 управляемым способом с судна-трубоукладчика 1. Натяжное устройство 9 подвергает трубопровод 2 в основном растягивающему напряжению, создаваемому в трубопроводе 2 посредством обычно противодействующих сил, вызванных судном-трубоукладчиком 1 и частью трубопровода 2, расположенной дальше по ходу от натяжного устройства 9. Хотя фиг. 3 показывает только одно натяжное устройство 9, судно-трубоукладчик 1 обычно содержит множество натяжных устройств 9, размещенных последовательно вдоль трубопровода 2.
Судно-трубоукладчик передвигается, обычно по шагам, вдоль установленного курса посредством движущего модуля 10 (фиг. 1 и 2), который управляет его скоростью передвижения и курсом.
СПУСКОВАЯ АППАРЕЛЬ
Со ссылкой на фиг. 3 и 4, спусковая аппарель 5 подвешена к судну-трубоукладчику 1, содержит множество шарнирно сочлененных сегментов 11, 12, 13 и множество опор 14 трубопровода, установленных на сегменты 11, 12, 13. Более конкретно, на каждый сегмент 11, 12, 13 устанавливается по меньшей мере одна опора 14.
Спусковая аппарель 5 содержит исполнительные агрегаты 15, 16, 17 для перемещения сегментов 11, 12, 13; и исполнительные агрегаты 18 для перемещения соответствующих опор 14. Более конкретно, исполнительные агрегаты 15, 16, 17 присоединены к соответствующим сегментам 11, 12, 13 и предназначены для регулировки положения соответствующих сегментов 11, 12, 13. Более конкретно, исполнительный агрегат 15 соединяет сегмент 11 с судном-трубоукладчиком 1. Поскольку сегмент 11 подвешен непосредственно к судну-трубоукладчику 1, исполнительный агрегат 15 обеспечивает регулировку углового положения сегмента 11 в отношении судна-трубоукладчика 1. Исполнительный агрегат 16 соединяет сегмент 12 с судном-трубоукладчиком 1. Поскольку сегмент 12 подвешен к сегменту 11, исполнительный агрегат 16 обеспечивает регулировку угла между сегментами 12 и 11.
Исполнительный агрегат 17 присоединен к сегментам 12 и 13. Поскольку сегменты 12 и 13 сочленены друг с другом, исполнительный агрегат 17 обеспечивает регулировку угла между сегментами 12 и 13.
Каждая опора 14 содержит исполнительный агрегат 18 для регулировки положения опоры в отношении сегментов 11, 12, 13, на которые она установлена.
Положение сегментов 11, 12, 13 и опор 14 определяет трассу трубопровода 2 вдоль спусковой аппарели 5, и конфигурацию трубопровода 2 между спусковой аппарелью 5 и дном 3. Опоры 14 должны предпочтительно все одновременно контактировать с трубопроводом 2.
ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ СПУСКОВОЙ АППАРЕЛИ
Судно-трубоукладчик 1 содержит электронную систему управления 19 для управления спусковой аппарелью 5. Хотя следующее описание ссылается конкретно на спусковую аппарель 5, показанную на приложенных чертежах, общие принципы действия электронной системы управления также применяются к спусковым аппарелям других конструкций. Электронная система управления 19 предпочтительно содержит централизованную систему 20 контроля (CMS), выполненную с возможностью сбора, хранения, и отображения обнаруживаемых данных, относящихся к оборудованию судна-трубоукладчика 1, к спусковой аппарели 5, и к трубопроводу 2 (фиг. 1); направляющую систему 21 укладки труб (PLG), выполненную с возможностью расчета в реальном времени конфигурации трубопровода 2 и напряжения, вызванного в трубопроводе 2 при его укладке, на основе данных, собранных централизованной системой контроля 20; управляющую систему 22 аппарели (RMS), выполненную с возможностью расчета, программирования, и управления последовательностью шагов, посредством которой можно изменить конфигурацию спусковой аппарели 5 от первой ко второй рабочей конфигурации, в то же время минимизируя напряжение, вызванное в трубопроводе 2; и консоль 23 управления для управления процедурой укладки.
ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА КОНТРОЛЯ
Централизованная система контроля 20 выполнена с возможностью сбора и хранения данных, содержащих:
- геометрические и механические данные трубопровода 2;
- данные о положении судна-трубоукладчика 1;
- коридор укладки трубопровода 2 на дно 3 водоема 4;
- данные, относящиеся к конфигурации сегментов 11, 12, 13 спусковой аппарели 5 (фиг. 3);
- данные, относящиеся к положению каждой опоры 14 в отношении соответствующего сегмента 11, 12, 13 (фиг. 3);
- данные, относящиеся к силам, которыми обмениваются трубопровод 2 и судно-трубоукладчик 1, и в частности, трубопровод 2 и натяжное устройство 9 (фиг. 3);
- данные, относящиеся к силам, которыми обмениваются трубопровод 2 и спусковая аппарель 5 (фиг. 3), и в частности, трубопровод 2 и опоры 14;
- данные, относящиеся к топографии дна 3 (фиг. 1 и 2).
Централизованная система контроля 20 предпочтительно также выполнена с возможностью сбора и хранения других данных, содержащих:
- погодные и морские условия, такие как ветер, течение и движение волн;
- данные о скорости судна-трубоукладчика 1;
- данные, относящиеся к точке 6 касания дна трубопроводом 2 (фиг. 1 и 2), когда она является обнаруживаемой сонаром в относительно мелкой воде, или подводным аппаратом с дистанционным управлением (ROV - не показан на чертежах);
- данные сборки трубопровода 2;
- данные, относящиеся к углу выхода трубопровода 2 из спусковой аппарели 5 (фиг. 3 и 4); и
- данные, относящиеся к перемещениям судна-трубоукладчика 1 в водоеме 4, особенно к перемещениям с шестью степенями свободы.
Централизованная система контроля 20 является наблюдающей системой для сбора вышеперечисленных данных посредством соответствующих датчиков 24, и для контроля и хранения данных. Централизованная система контроля 20 содержит графический интерфейс 25, показывающий всю сборочную линию 8 и спусковую аппарель 5 (фиг. 1 и 2). В показанном примере, централизованная система контроля 20 взаимодействует с оснащением на сборочной линии 8 (фиг. 1), с направляющей системой 21 укладки, и с управляющей системой 22 аппарели, и по архитектуре может быть выполнена с возможностью продолжения вышеперечисленных взаимодействий и приспособления к спусковым аппарелям различных конструкций.
НАПРАВЛЯЮЩАЯ СИСТЕМА УКЛАДКИ
Основной целью направляющей системы 21 укладки является контроль в реальном времени напряжения, вызванного в трубопроводе 2, для предотвращения его перенапряжения.
Направляющая система 21 укладки выполнена с возможностью расчета напряжения, вызванного в трубопроводе 2, как функции данных, хранящихся в централизованной системе 20 контроля. Направляющая система 21 укладки содержит блок 26 проверки достоверности данных, компьютер 27, снабженный памятью и выполненный с возможностью расчета конфигурации трубопровода 2 между спусковой аппарелью 5 и дном 3 водоема 4 (фиг. 1 и 2), и напряжения, вызванного в трубопроводе 2; и блок 28 интерфейса оператора для помощи оператору в управлении судном-трубоукладчиком 1 (фиг. 1 и 2). Компьютер 27 использует программу, основанную на теории конечноэлементной модели, для расчета конфигурации трубопровода 2, и напряжения, вызванного в трубопроводе 2. Другими словами, направляющая система 21 укладки проверяет достоверность данных, собранных централизованной системой 20 контроля; определяет конфигурацию трубопровода 2 между спусковой аппарелью 5 и точкой касания дна 6; строит конечноэлементную модель трубопровода 2; и рассчитывает напряжение как функцию сил, приложенных к модели трубопровода 2 и выведенных из данных, хранящихся в централизованной системе 20 контроля.
УПРАВЛЯЮЩАЯ СИСТЕМА АППАРЕЛИ
Управляющая система 22 аппарели содержит компьютерный планировщик 29 и компьютерный диспетчер 30. Компьютерный планировщик 29 принимает информацию от направляющей системы 21 укладки, и выполнен с возможностью обработки программы для генерации множества последовательностей шагов, и выбора оптимальной последовательности шагов как функции множества последовательностей шагов. Каждая последовательность шагов способна изменить конфигурацию спусковой аппарели 5 от первой ко второй рабочей конфигурации. Каждый шаг из последовательности шагов связан с перемещением одного из сегментов 11, 12, 13 или опоры 14 (фиг. 3 и 4). Оптимизация основана на минимизации риска перенапряжения трубопровода 2.
Оптимальная последовательности шагов предпочтительно выбирается с использованием алгоритмов комбинаторной оптимизации, в частности, генетических алгоритмов. Некоторые из общих принципов и применений генетических алгоритмов могут быть найдены в 'Introduction to Genetic Algorithms' by S.N. Sivanandam and S.N. Deepa; published by Springer; first edition (12 December, 2007).
В основном, каждая последовательность шагов соответствует одному элементу, а множество последовательностей шагов соответствует группе элементов. Механизм выбора (селекции) определяется функцией приспособленности, которая, в рассматриваемом случае, определяется в основном на основе значений напряжения, рассчитанных направляющей системой 21 укладки и, следовательно, учитывает напряжение, вызванное в трубопроводе 2 в первой рабочей конфигурации. Более конкретно, функция приспособленности определяется для назначения элементу с лучшими оцененными значениями напряжения значения приспособленности лучшего, чем элемента с худшими оцененными значениями напряжения. Функция приспособленности предпочтительно также учитывает общее время, которое занимает изменение от первой ко второй рабочей конфигурации.
Компьютерный планировщик 29 генерирует группу элементов с использованием способа генерации, который может быть случайным, то есть шаги и соответствующие последовательности шагов генерируются случайно или полу-случайно, то есть элементы генерируются с несколькими заданными параметрами и несколькими случайными параметрами, или генерируются случайно в пределах заданных диапазонов значений шагов. Другими словами, шаги в последовательности генерируются случайно в пределах заданных диапазонов значений шагов.
Компьютерный планировщик 29 применяет функцию приспособленности к группе элементов; назначает значение приспособленности каждому элементу в группе на основе функции приспособленности; и определяет оценку, по которой элементы оцениваются согласно их соответствующему значению приспособленности, и по которой наилучшие значения приспособленности связаны с элементами, соответствующими последовательностям шагов, подходящим наилучшим образом для изменения конфигурации спусковой аппарели 5.
Компьютерный планировщик 29 выбирает элементы, которым присвоены наилучшие количественные показатели посредством функции приспособленности. Компьютерный планировщик 29 генерирует новую группу элементов из выбранных элементов с использованием генерирующей технологии. Генерирующие технологии содержат, например, первую, так называемую технологию кроссинговера (кроссовера), посредством которой некоторые части по меньшей мере двух выбранных элементов объединяются для генерации двух новых элементов; и вторую, так называемую технологию замены или мутации, посредством которой производятся случайные изменения частей некоторого количества элементов.
Компьютерный планировщик 29 определяет новую оценку новых элементов посредством применения функции приспособленности к новым группам элементов; и еще раз выбирает элементы с наилучшими значениями приспособленности. Компьютерный планировщик 29 продолжает генерацию новых групп элементов на основе ранее сгенерированной группы, до тех пор, пока не будет удовлетворен один из некоторого количества критериев остановки. Критерии остановки могут, например, содержать предел количества новых групп, которые могут генерироваться, или получение элемента со значением приспособленности в пределах заданного диапазона.
В любом случае, компьютерный планировщик 29 способен выбрать элемент с наилучшим количественным показателем, и получить оптимальную последовательность шагов, определенную выбранным элементов; и рассчитать оцененные значения, связанные с каждым шагом в оптимальной последовательности шагов.
Эти оцененные значения предпочтительно включают в себя оцененные значения, относящиеся к конфигурации спусковой аппарели 5. Оцененные значения предпочтительно содержат геометрические значения, определяющие оцененные положения опор 14 и сегментов 11, 12, 13 (фиг. 3 и 4) и/или значения, определяющие оцененные силы, которыми обмениваются спусковая аппарель и трубопровод 2.
Оцененные значения могут также включать в себя предсказанные значения напряжения, вызванного в трубопроводе.
Компьютерный планировщик 29 передает оптимальную последовательность шагов компьютерному диспетчеру 30, который сообщает отдельные шаги в оптимальной последовательности шагов централизованной системе 20 контроля, управляющей исполнительными агрегатами 15, 16, 17, 18 (фиг. 3 и 4).
Компьютерный диспетчер 30 осуществляет программу для выполнения каждого шага в оптимальной последовательности шагов, и проверяет то, что промежуточная конфигурация является такой, как предполагалось. Более конкретно, проверка состоит в определении, собраны ли централизованной системой контроля данные после выполнения этого шага, являются ли они однородными с оцененными значениями, соответствуют ли они оцененным значениям, или предпочтительно, удовлетворяет ли разница между оцененными значениями и собранными данными заданным критериям приемлемости. Если разница между собранными данными и оцененными значениями действительно удовлетворяет критериям приемлемости, то компьютерный диспетчер 30 позволяет осуществить выполнение по меньшей мере одного дополнительного шага в оптимальной последовательности шагов. Наоборот, в случае значительной разницы между собранными данными и оцененными значениями, то есть несоответствия критериям приемлемости, выполнение оптимальной последовательности шагов, ранее выбранной компьютерным планировщиком 29, прерывается.
Направляющая система укладки 21, для расчета в реальном времени напряжения, вызванного в трубопроводе 2, поставляет обновленные данные о напряжении компьютерному планировщику 29, который, таким образом, определяет новую функцию приспособленности.
На основе данных, собранных централизованной системой контроля 20, компьютерный планировщик 29 генерирует новое множество последовательностей шагов с количеством шагов, которое учитывает шаги, которые уже выполнены, и выбирает новую оптимальную последовательность шагов с использованием новой функции приспособленности. Новая оптимальная последовательности шагов осуществляется компьютерным диспетчером 30.
То есть, с использованием генетического алгоритма, компьютерный планировщик 29 обеспечивает новую оптимальную последовательность шагов, которая осуществляется компьютерным диспетчером 30, как описано выше; и вышеперечисленные шаги выполняются до тех пор, пока спусковая аппарель не будет установлена во вторую рабочую конфигурацию.
Описанный способ ссылается конкретно на последовательности шагов для перемещения спусковой аппарели 5, и в которых шаги содержат угловые перемещения одного из сегментов 11, 12, 13, и, предпочтительно, линейные перемещения опор 14. Длина каждого шага, углового или линейного, является, следовательно, существенным элементом в перемещении спусковой аппарели от первой ко второй рабочей конфигурации. Длина каждого шага, фактически, влияет на количество шагов в последовательности шагов, напряжение, вызванное в трубопроводе 2, и время, затраченное на установление спусковой аппарели 5 в заданное положение. Выбор длины шага основан, по существу, на приемлемых значениях, основанных на испытаниях, но которые меняются в пределах широкого диапазона. Первая технология выбора длины шага состоит в выборе значения длины промежуточного шага в заданном диапазоне. Вторая технология состоит в выборе многочисленных значений длины шага, и совместном выполнении многочисленных процедур оптимизации, для снабжения оператора множеством оптимальных последовательностей шагов, относящимся к соответствующим длинам шагов. Например, могут быть выбраны две длины шага - для простоты, «длинный шаг» и «короткий шаг». Оптимальная последовательности «длинных шагов» будет устанавливать спусковую аппарель 5 в заданное положение быстрее, и будет производить заданное напряжение в трубопроводе 2; тогда как оптимальная последовательности «коротких шагов» затратит больше времени для установки спусковой аппарели 5 в заданное положение и, вероятно, будет производить меньшее напряжение, чем оптимальная последовательности «длинных шагов».
Оператор может, таким образом, выбирать оптимальную последовательность шагов, наилучшим образом подходящую при обстоятельствах в данный момент.
Преимущества данного изобретения заключаются в обеспечении высокой степени безопасности, для изменения положения спусковой аппарели без оставления трубопровода на дне.
Ясно, что могут быть внесены изменения в описанный вариант осуществления данного изобретения, не выходя, однако, за рамки объема охраны сопутствующей формулы изобретения. Более конкретно, хотя описанный предпочтительный вариант осуществления данного изобретения ссылается на множество компьютеров, каждый из которых предназначен для осуществления специфических компьютерных программ, данное изобретение также включает в себя варианты осуществления, содержащие отличающееся от описанного множество компьютеров, и даже только один компьютер и одну программу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО-ТРУБОУКЛАДЧИК (ВАРИАНТЫ) И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 1999 |
|
RU2230967C2 |
| ОДНОКОРПУСНОЕ СУДНО ДЛЯ УКЛАДКИ ТРУБОПРОВОДА (ВАРИАНТЫ) И СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С ОДНОКОРПУСНОГО СУДНА (ВАРИАНТЫ) | 2008 |
|
RU2490163C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УКЛАДКИ ТРУБОПРОВОДА НА ДНО ВОДОЕМА | 2012 |
|
RU2601657C2 |
| СУДНО-ТРУБОУКЛАДЧИК И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2229053C2 |
| СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С УКЛАДОЧНОГО СУДНА НА ДНО ВОДОЕМА И УКЛАДОЧНОЕ СУДНО | 2011 |
|
RU2554386C2 |
| СПОСОБ УКЛАДКИ ТРУБОПРОВОДА С СУДНА И УСТРОЙСТВО ДЛЯ УКЛАДКИ ТРУБОПРОВОДА С СУДНА (ВАРИАНТЫ) | 2012 |
|
RU2607911C2 |
| НАПРАВЛЯЮЩАЯ КОНСТРУКЦИЯ ДЛЯ УКЛАДКИ ПО J-ОБРАЗНОЙ КРИВОЙ | 2017 |
|
RU2707691C1 |
| КОМПЛЕКС ОБОРУДОВАНИЯ ДЛЯ СВАРКИ МОРСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2544620C2 |
| ГИБКАЯ ТРУБА | 2017 |
|
RU2743093C2 |
| Установка для обертывания поддонов | 2020 |
|
RU2769526C1 |
Группа изобретений относится к строительству подводных трубопроводов. Электронная система для управления спусковой аппарелью судна-трубоукладчика при укладке трубопровода на дно водоема выполнена с возможностью сбора данных, относящихся к конфигурации спусковой аппарели, к судну-трубоукладчику, и данных, относящихся к силам, передаваемых спусковой аппарелью и судном-трубоукладчиком трубопроводу. На основании полученных данных выполняется генерация множества последовательностей шагов для изменения конфигурации спусковой аппарели судна-трубоукладчика от первой ко второй рабочей конфигурации. Затем для минимизации напряжения, вызванного в трубопроводе в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями, осуществляется выбор наилучшей последовательности шагов как функции множества последовательностей шагов и собранных данных. 6 н. и 23 з.п. ф-лы, 5 ил.
1. Электронная система управления для управления спусковой аппарелью с изменяемой конфигурацией судна-трубоукладчика для укладки трубопровода на дно водоема; причем электронная система (19) управления выполнена с возможностью: сбора данных, относящихся к конфигурации спусковой аппарели (5), данных, относящихся к судну-трубоукладчику (1), и данных, относящихся к напряжению, вызванному в трубопроводе (2); генерации множества последовательностей шагов для изменения конфигурации спусковой аппарели (5) от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе (2) в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями.
2. Электронная система управления по п. 1, выполненная с возможностью передачи команд спусковой аппарели (5) для осуществления по меньшей мере одного шага из оптимальной последовательности шагов.
3. Электронная система управления по п. 2, выполненная с возможностью: назначения на каждом шаге в оптимальной последовательности шагов оцененных значений, относящихся к промежуточной конфигурации спусковой аппарели (5); сбора данных, относящихся к конфигурации спусковой аппарели (5) в промежуточной конфигурации, и соответствующих оцененным значениям; и сравнения оцененных значений с собранными данными.
4. Электронная система управления по п. 3, выполненная с возможностью передачи команд для осуществления по меньшей мере одного дополнительного шага из оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, удовлетворяет заданным критериям приемлемости.
5. Электронная система управления по п. 3, выполненная с возможностью блокировки осуществления дополнительных шагов из оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, не удовлетворяет заданным критериям приемлемости.
6. Электронная система управления по п. 5, выполненная с возможностью: генерации другого множества последовательностей шагов для изменения конфигурации спусковой аппарели (5) от промежуточной конфигурации ко второй рабочей конфигурации; и выбора дополнительной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе (2) в каждой промежуточной конфигурации между начальной промежуточной и второй рабочей конфигурациями.
7. Электронная система управления по п. 1, выполненная с возможностью: выбора оптимальной последовательности шагов с использованием способа, основанного на генетических алгоритмах, и использования функции приспособленности, относящейся к напряжению, вызванному в трубопроводе (2).
8. Электронная система управления по п. 1, выполненная с возможностью определения сил, передаваемых судном-трубоукладчиком (1) и спусковой аппарелью (5) на трубопровод (2).
9. Электронная система управления по п. 1, выполненная с возможностью расчета конфигурации трубопровода (2) между судном-трубоукладчиком (1) и дном (3) водоема (4);
10. Электронная система управления по п. 8, выполненная с возможностью расчета напряжения, вызванного в трубопроводе (2).
11. Электронная система управления по п. 1, и содержащая централизованную систему (20) контроля, выполненную с возможностью сбора, контроля и запоминания обнаруживаемых данных, относящихся к спусковой аппарели (5) и судну-трубоукладчику (1); и направляющую систему (21) укладки труб, подключенную к централизованной системе (20) контроля и выполненную с возможностью контроля в реальном времени напряжения, вызванного в трубопроводе (2).
12. Электронная система управления по п. 11, и содержащая управляющую систему (22) спусковой аппарели, содержащую компьютерный планировщик (29), выполненный с возможностью осуществления программы оптимизации для определения оптимальной последовательности шагов, и компьютерный диспетчер (30) для осуществления и проверки шагов.
13. Электронная система управления по п. 1, выполненная с возможностью: генерации первого количества последовательностей шагов с первым заданным шагом и второго множества последовательностей шагов со вторым заданным шагом, для изменения конфигурации спусковой аппарели (5) от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной первой и одной второй оптимальных последовательностей шагов как функций собранных данных и соответственно первого и второго множества последовательностей шагов, для минимизации напряжения, вызванного в трубопроводе (2) в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями; причем первый заданный шаг больше чем второй заданный шаг.
14. Судно-трубоукладчик, содержащее систему управления по п. 1.
15. Спусковая аппарель с изменяемой конфигурацией судна-трубоукладчика, причем спусковая аппарель содержит множество взаимосоединенных сегментов с регулируемым наклоном (11, 12, 13) и множество регулируемых опор (14), установленных на сегменты (11, 12, 13); причем каждый шаг в последовательности шагов связан с перемещением одного из сегментов (11, 12, 13) или опор (14); причем спусковая аппарель (5) оперативно подключена к системе управления по п. 1.
16. Судно-трубоукладчик, содержащее спусковую аппарель с изменяемой конфигурацией по п. 15.
17. Способ управления для управления спусковой аппарелью с изменяемой конфигурацией судна-трубоукладчика для укладки трубопровода на дно водоема; причем способ управления содержит этапы: сбора данных, относящихся к конфигурации спусковой аппарели (5), данных, относящихся к судну-трубоукладчику (1), и данных, относящихся к напряжению, вызванному в трубопроводе (2); генерации множества последовательностей шагов для изменения конфигурации спусковой аппарели (5) от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных, для минимизации напряжения, вызванного в трубопроводе (2) в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями.
18. Способ управления по п. 17, содержащий этап передачи команд спусковой аппарели (5) для осуществления по меньшей мере одного шага из оптимальной последовательности шагов.
19. Способ управления по п. 18, содержащий этапы: назначения на каждом шаге из оптимальной последовательности шагов оцененных значений, относящихся к промежуточной конфигурации спусковой аппарели (5); сбора данных, относящихся к конфигурации спусковой аппарели (5) в промежуточной конфигурации и соответствующих оцененным значениям; и сравнения оцененных значений с собранными данными.
20. Способ управления по п. 19, содержащий этап передачи команд спусковой аппарели (5) для осуществления по меньшей мере одного дополнительного шага из оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, удовлетворяет заданным критериям приемлемости.
21. Способ управления по п. 19, содержащий этап блокировки осуществления дополнительных шагов из оптимальной последовательности шагов, когда разница между оцененными значениями и собранными данными, относящимися к промежуточной конфигурации спусковой аппарели, не удовлетворяет заданным критериям приемлемости.
22. Способ управления по п. 21, содержащий этапы: генерации другого множества последовательностей шагов для изменения конфигурации спусковой аппарели (5) от промежуточной конфигурации ко второй рабочей конфигурации; и выбора дополнительной оптимальной последовательности шагов как функции множества последовательностей шагов и собранных данных для минимизации напряжения, вызванного в трубопроводе (2), в каждой промежуточной конфигурации между начальной промежуточной и второй рабочей конфигурациями.
23. Способ управления по п. 17, содержащий этапы: выбора оптимальной последовательности шагов с использованием способа оптимизации, основанного на генетических алгоритмах; и построения функции приспособленности, относящейся к напряжению, вызванному в трубопроводе (2).
24. Способ управления по п. 17, содержащий этап обнаружения сил, передаваемых судном-трубоукладчиком (1) и спусковой аппарелью (5) на трубопровод (2).
25. Способ управления по п. 17, содержащий этап расчета конфигурации трубопровода (2) между судном-трубоукладчиком (1) и дном (3) водоема (4).
26. Способ управления по п. 24 или 25, содержащий этап расчета напряжения, вызванного в трубопроводе (2).
27. Способ управления по п. 17, в котором спусковая аппарель содержит множество взаимосоединенных сегментов с регулируемым наклоном (11, 12, 13) и множество регулируемых опор (14), установленных на сегменты (11, 12, 13); причем каждый шаг в последовательности шагов связан с перемещением одного из сегментов (11, 12, 13) или опоры (14).
28. Способ управления по п. 17, содержащий этапы: генерации первого множества последовательностей шагов с первым заданным шагом, и второго множества последовательностей шагов со вторым заданным шагом для изменения конфигурации спусковой аппарели (5) от первой ко второй рабочей конфигурации; и выбора по меньшей мере одной первой и одной второй оптимальных последовательностей шагов как функций собранных данных и соответственно первого и второго множества последовательностей шагов, для минимизации напряжения, вызванного в трубопроводе (2) в каждой промежуточной конфигурации между первой и второй рабочими конфигурациями; причем первый заданный шаг больше чем второй заданный шаг.
29. Носитель данных, содержащий программу, которая предписывает компьютеру осуществлять способ по любому одному из пп. 17-28.
| WO 2009098586 A2, 13.08.2009 | |||
| WO 2011077238 A1, 30.06.2011 | |||
| US 3487648 A, 06.01.1970 | |||
| WO 2011086100 A2, 21.07.2011 | |||
| СУДНО-ТРУБОУКЛАДЧИК И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2229053C2 |

