Изобретение относится к метрологии и предназначено для одновременного измерения и регистрации трех компонентов суммарной нагрузки - вертикальной силы, боковой силы и опрокидывающего момента, действующих в выбранном поперечном сечении рельса при его контактном взаимодействии с колесом подвижного состава.
Известен способ (D.R. Ahlbeck, H.D. Harrison: "Technique for Measuring Wheel/Rail Forces with Trackside Instrumentation", ASME Winter Annual Meeting, Atlanta, Georgia, 1977, Rpt. # 77-WA/RT-9, D.R. Ahlbeck, H.D. Harrison: "Techniques for Measurement of Wheel-Rail Forces", The Shock and Vibration Digest, 12(10), 1980, 31-41, 1980) измерения горизонтальных сил по сигналам от тензорезисторов, расположенных шевронообразно на подошве рельса. При этом способе величину горизонтальной силы определяют как разность сдвигающих сил, получаемых прямыми измерениями. Недостаток способа состоит в том, что он не позволяет получать несколько компонентов нагрузки на рельс.
Известны способы, при которых о компонентах нагрузки на рельс судят по деформациям диска колеса (RU 2441206 С1, МПК G01L 5/16, G01L 1/22. Устройство для измерения вертикальных и боковых сил взаимодействия между колесом и рельсом, опубл. 27.01.2012), по деформациям силоизмерительных элементов, соединяющих ступицу и обод колеса (СССР 918813, МПК G01M 17/00. Установка для исследования взаимодействия колеса и рельса, опубл. 07.04.1982). Недостаток этих способов состоит в том, что они не позволяют судить об изменении во времени нагрузок в выбранном сечении рельса.
Наиболее близким по технической сущности аналогом представляется способ по ГОСТ Р 55050-2012 «Железнодорожный подвижной состав. Нормы допустимого воздействия на железнодорожный путь и методы испытаний» (дата введения 2013.07.01), при котором компоненты нагрузки на рельс определяют по деформациям шейки рельса. Этот способ принят за прототип.
Сущность его состоит в том, что в выбранном поперечном сечении рельса в четырех зонах его шейки наклеивают тензорезисторы с номерами 1, 2, 3, 4 и электрически соединяют их в измерительный мост m1, на одну диагональ моста подают питающее напряжение U1, а вторую диагональ подключают к входу измерительного канала А1 тензометрической аппаратуры, содержащей тензоусилитель и регистратор. Выполняют градуировочные нагружения выбранного сечения рельса определенными сочетаниями (комбинациями) входных факторов, которые назначают в соответствии с некоторым планом (планом эксперимента), и при каждом нагружении регистрируют с помощью тензометрической аппаратуры отклик sm1, представляющий собой приращение сигнала измерительного моста m1. В качестве входных факторов принимают приращения боковой силы Ру, ее вертикального смещения Lz, вертикальной силы Pz и ее поперечного смещения Ly относительно их начальных (нулевых) значений, при этом сами факторы и их приращения определяют в связанной с рельсом прямоугольной правой системе координат OXYZ. Начало системы О выбирают на расстоянии примерно 13 мм от поверхности катания неизношенного рельса, ось OZ направляют вниз по оси симметрии выбранного сечения, ось ОХ - перпендикулярно плоскости выбранного сечения, а ось OY дополняет две другие оси до правой системы. Заметим, что рельс железнодорожного пути установлен с подуклонкой внутрь колеи, поэтому ось OZ и направленная вдоль нее сила Pz, строго говоря, не являются вертикальными. Однако в данном описании сохраняется устоявшаяся терминология, при которой в связанной с рельсом системе координат сила Pz называется вертикальной, а сила Ру - боковой.
По полученным при градуировочных нагружениях значениям отклика вычисляют градуировочный коэффициент k1 как усредненное по нескольким нагружениям отношение входного фактора Ру к величине отклика sm1, а также значение систематической погрешности измерений ΔРу для каждого нагружения, как разность между фактической величиной входного фактора Ру и его измеренной (восстановленной по отклику) величиной Ру изм=sm1⋅k1. В данном случае под систематической ошибкой понимается ошибка измерений, обусловленная способом (методикой, алгоритмом) восстановления входного фактора по отклику.
При выполнении практических измерений действующее в момент времени tm значение боковой силы Py(tm) на рельс от контактирующего с ним колеса определяют как сумму измеренной величины силы Py(tm)изм в сочетании с максимальной величиной систематической погрешности ΔРу max, полученной по результатам градуировки:
Py(tm)=Py(tm)изм±ΔPy max,
где Py(tm)изм=sm1(tm)⋅k1 - измеренное (восстановленное по отклику sm1(tm)) значение боковой силы.
Для измерения вертикальной силы Pz в двух дополнительных зонах шейки рельса наклеивают тензорезисторы с номерами 5, 6, вместе с двумя компенсационными тензорезисторами К их электрически соединяют в измерительный мост m2, на одну диагональ которого подают питающее напряжение U2, а вторую диагональ подключают к входу измерительного канала А2 тензометрической аппаратуры, содержащей тензоусилитель и регистратор. Аналогично измерению боковой силы, действующее в момент времени tm значение вертикальной силы Pz(tm) на рельс от контактирующего с ним колеса определяют по формуле
Рz(tm)=Рz(tm)изм±ΔРz max,
где Pz(tm)изм=sm2(tm)⋅k2 - измеренное значение вертикальной силы;
k2, ΔPz max, sm2(tm) - градуировочный коэффициент, максимальное значение систематической погрешности и величина отклика в момент времени tm в измерительном канале А2 соответственно.
Рассмотрим более подробно градуировочные операции выбранного сечения рельса, оснащенного измерительными мостами m1, m2, подключенными к тензометрической аппаратуре, воспользовавшись для этого специально разработанной конечно-элементной моделью фрагмента железнодорожного пути, содержащего рельс Р65, в выбранном сечении которого в шести зонах шейки «наклеены» виртуальные тензорезисторы согласно принятой схеме. Модель настроена так, что максимально адекватно воспроизводит упругие свойства рельса и шпал, с которыми он скреплен, и позволяет расчетным путем получать напряженно-деформированное состояние стального рельса в зонах наклейки тензорезисторов при градуировочных нагружениях. Применение указанной модели для проведения сравнительной оценки систематических погрешностей известного и предлагаемого способов измерения компонентов нагрузки на рельс от контактирующего с ним колеса имеет ряд практических преимуществ. Во-первых, в этом случае исключаются погрешности приложения входных факторов, т.е. погрешности градуировочного приспособления, во-вторых, исключаются погрешности регистрации отклика, т.е. погрешности системы измерения, в-третьих, минимизируются материальные затраты.
Для виртуальной (с применением конечно-элементной модели) градуировки выбранного сечения рельса приняты следующие диапазоны изменения входных факторов: боковой силы Ру от 0.0 до 8.0 тс, ее вертикального смещения Lz от 0.0 до -13.0 мм, вертикальной силы Pz от 0.0 до 10.0 тс и ее поперечного смещения Ly от 0.0 до+20.0 мм и от 0.0 до -20 мм. Для удобства входные факторы приведены к безразмерной форме путем деления на соответствующие единицы их измерения: силы делением на 1 тс, смещения сил - на 1 мм, а опрокидывающего момента - на 1 тс⋅см.
Из результатов виртуальной градуировки следует, что при измерении боковой силы Ру указанным способом максимальная систематическая погрешность измерений составляет ±1.1 тс или 13.8% от принятого для нее диапазона изменения (8.0 тс). Недостатком способа является низкая точность измерения боковой силы из-за большой систематической погрешности.
Технический результат изобретения заключается в том, что при экспериментальных оценках воздействия подвижного состава на железнодорожный путь предлагаемый способ позволяет измерять три компоненты суммарной нагрузки на рельс - вертикальную силу, боковую силу и опрокидывающий момент с высокой точностью за счет существенного уменьшения систематической погрешности измерений.
Технический результат достигается тем, что в способе измерения трех компонентов нагрузки в сечении рельса при контактном взаимодействии с колесом железнодорожного подвижного состава, включающем электрическое соединение наклеенных в зонах шейки рельса тензорезисторов в измерительные мосты, подключение мостов к входу измерительных каналов тензометрической аппаратуры, позволяющей регистрировать отклик в измерительных каналах на приращение входных факторов, градуировку измерительных каналов по определенному плану эксперимента с вычислением градуировочных коэффициентов и систематических погрешностей, визуальное представление результатов измерения, тензорезисторы, наклеенные в четырех зонах шейки рельса, соединяют в три измерительных моста, каждый мост подключают к отдельному измерительному каналу тензометрической аппаратуры, градуировку выполняют по трехфакторному плану эксперимента комбинациями входных факторов - вертикальной силы, боковой силы и опрокидывающего момента, градуировочные коэффициенты определяют умножением матрицы плана эксперимента на матрицу правую обобщенную обратную к матрице отклика, систематические погрешности измерений определяют как разницу между приложенными и восстановленными по отклику значениями факторов плана, результаты измерения представляют в виде сочетания восстановленного по отклику значения входного фактора и максимального значения систематической погрешности, полученной при градуировке.
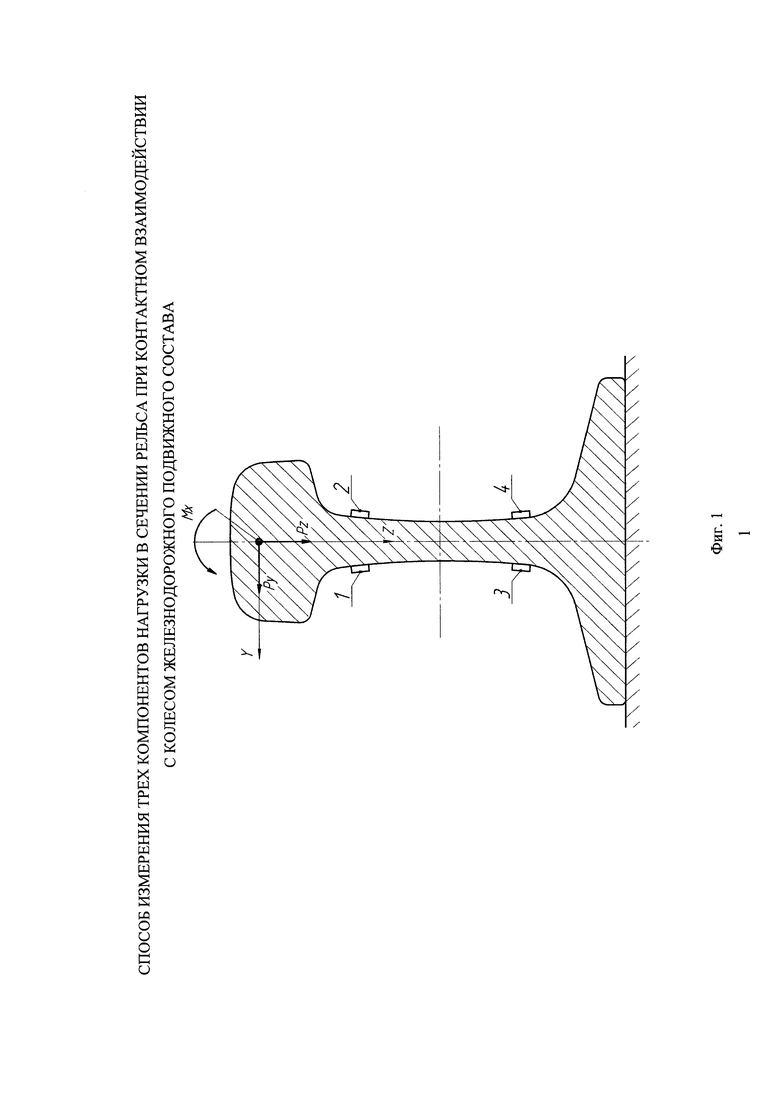
На фиг. 1 изображено поперечное сечение рельса с наклеенными в четырех зонах его шейки тензорезисторами с номерами 1, 2, 3, 4.
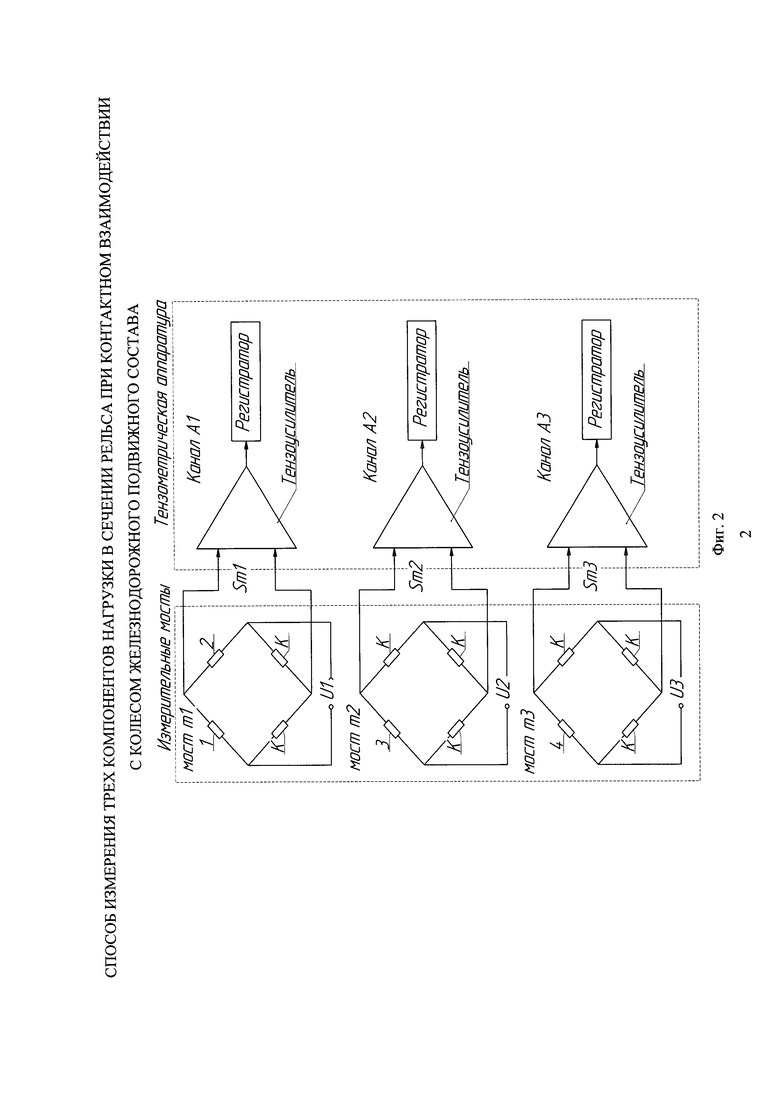
На фиг. 2 изображена схема электрического соединения тензорезисторов с номерами 1, 2, 3, 4 в три измерительных моста m1, m2, m3, подключенных к каналам A1, А2, A3 тензометрической аппаратуры.
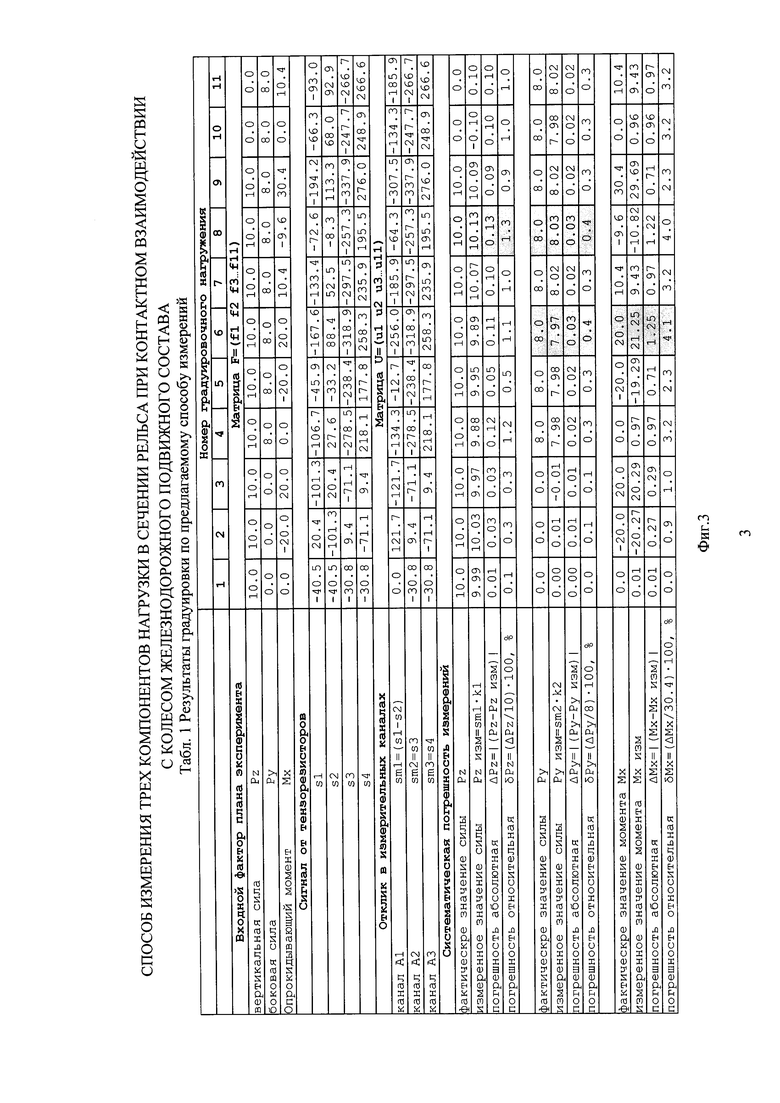
На фиг. 3 в табл. 1 представлены результаты градуировки по предлагаемому способу измерений.
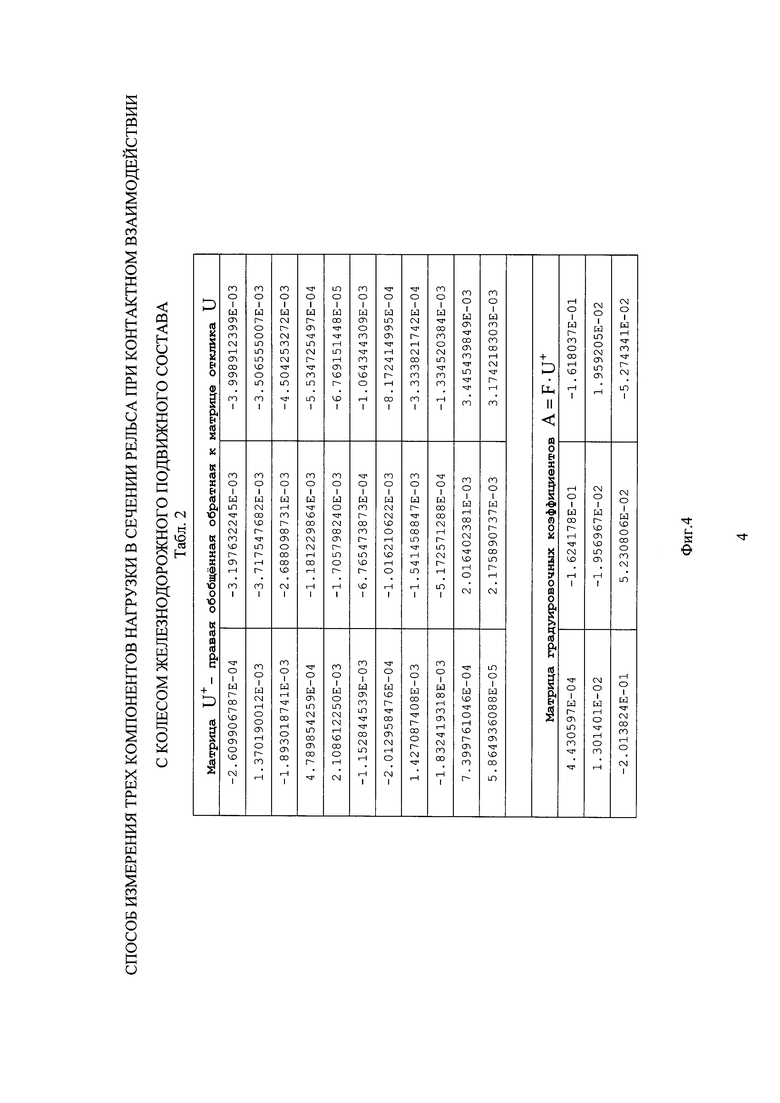
На фиг. 4 в табл. 2 представлены использованные в расчетах матрицы U+ (правая обобщенная обратная к матрице отклика U) и А (матрица градуировочных коэффициентов).
Способ реализуется следующим образом. С целью повышения точности измерений боковой силы в предлагаемом способе:
- помимо боковой и вертикальных сил в выбранном поперечном сечении рельса измеряется дополнительный (третий) входной фактор, который представляет собой суммарный опрокидывающий момент Мх вокруг продольной оси ОХ от действия суммарных вертикальных и боковых сил на рельс в зонах контакта с колесом;
- в прототипе не оговаривается точка приложения измеренной (восстановленной по отклику) силы, а в предлагаемом способе, напротив, все три входных фактора - суммарная вертикальная сила Pz, суммарная боковая сила Ру и суммарный опрокидывающий момент Mx=Pz⋅Ly-Py⋅Lz как при градуировке, так и при измерениях строго приведены к началу системы координат OXYZ, как показано на фиг. 1;
- для измерения трех входных факторов (трех компонентов нагрузки на рельс от контактирующего с ним колеса), как и в прототипе по ГОСТ Р 55050-2012, используются четыре зоны наклейки тензорезисторов 1, 2, 3, 4, однако в отличие от прототипа тензорезисторы электрически соединены в три измерительные моста m1, m2, m3, подключенные к каналам A1, А2, A3 тензометрической аппаратуры (фиг. 2): мост m1 содержит тензорезисторы 1, 2, включенные в смежные плечи, и два компенсационных тензорезистора K, мосты m2 и m3 содержат по одному рабочему тензорезистору 3 и 4 соответственно и по три компенсационных резистора K каждый;
- в предлагаемом способе по результатам градуировки вычисляется 9 градуировочных коэффициентов в виде матрицы размером 3×3, которые при измерениях позволяют учесть взаимное влияние каждого из трех входных факторов на отклик в каждом из трех измерительных каналов, в результате чего обеспечивается существенное уменьшение систематической погрешности измерений, следовательно, повышение их точности.
В предлагаемом способе считается, что матрица трехфакторного плана эксперимента F и полученная при градуировке по этому плану матрица отклика U связаны линейной зависимостью
F=A⋅U,
где А - матрица градуировочных коэффициентов, которая определяется, например, из соотношения
A=F⋅U+,
где U+ - матрица правая обобщенная обратная к матрице отклика U.
Систематические погрешности измерений в i-м градуировочном нагружении
 ,
,
где Δƒi - систематические погрешности измерений в i-м градуировочном нагружении;
ΔPZi - значение систематической погрешности вертикальной силы;
ΔРуi - значение систематической погрешности боковой силы;
ΔМхi - значение систематической погрешности опрокидывающего момента
при общем количестве нагружений n, находят как разность между фактическими fi и измеренными fi изм значениями входных факторов
 ,
,
где
 - i-й столбец матрицы плана эксперимента, где
- i-й столбец матрицы плана эксперимента, где
F=(f1 f2 f3 … fn);
PZi - фактическое значение вертикальной силы;
Pyi - фактическое значение боковой силы;
Мхi - фактическое значение опрокидывающего момента.
 - столбец восстановленных по отклику, где
- столбец восстановленных по отклику, где
РZизм - измеренное значение вертикальной силы;
Руiизм - измеренное значение боковой силы;
Мxiизм - измеренное значение опрокидывающего момента.
 (измеренных) значений входных факторов при i-м градуировочном нагружении.
(измеренных) значений входных факторов при i-м градуировочном нагружении.
При выполнении практических измерений значения трех входных факторов - трех компонентов действующей в момент времени tm нагрузки на рельс от контактирующего с ним колеса (суммарной вертикальной силы Pz(tm), суммарной боковой силы Py(tm) и суммарного опрокидывающего момента Mx(tm)) определяют как сумму восстановленных по отклику  (измеренных) величин f(tm)изм=A⋅u(tm) в сочетании с максимальными величинами систематической погрешности
(измеренных) величин f(tm)изм=A⋅u(tm) в сочетании с максимальными величинами систематической погрешности
 , т.е.
, т.е.
 ,
,
или в компактной форме
f(tm)=f(tm)изм±Δfmax.
Из представленных (фиг. 3, табл. 1) результатов виртуальной градуировки по трехфакторному плану следует, что при измерении предлагаемым способом максимальная систематическая погрешность составляет:
- для боковой силы Ру ± 0.03 тс (у прототипа ±1.10 тс) или 0.4% (у прототипа 13.8%) от принятого диапазона ее изменения (8.0 тс);
- для вертикальной силы Рz ±0.13 тс (у прототипа ±0.20 тс) или 1.3% (у прототипа 2.0%) от принятого диапазона ее изменения (10.0 тс);
- для опрокидывающего момента Мх ±1.25 тс⋅см или 4.1% от диапазона его изменения (30.4 тс⋅см), в прототипе опрокидывающий момент не контролируется.
Таким образом, совокупность отличительных признаков предлагаемого способа измерения трех компонентов суммарной нагрузки на рельс от контактирующего с ним колеса позволяет уменьшить систематическую погрешность измерения боковой и вертикальной сил и обеспечить измерение дополнительной компоненты - суммарного опрокидывающего момента в выбранном поперечном сечении рельса. Три указанных компоненты полностью определяют нагруженность выбранного поперечного сечения рельса.
Этот способ специально разрабатывался как один из инструментов для изучения вождения тяжеловесных составов, оказывающих повышенное силовое воздействие на путь, поэтому при поездных испытаниях таких составов требуется применять более точные и совершенные способы измерения нагрузок на рельсы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения нагрузок на рельсы при воздействии колес железнодорожного подвижного состава | 2019 |
|
RU2704141C1 |
| СПОСОБ ИЗМЕРЕНИЯ БОКОВЫХ СИЛ, ДЕЙСТВУЮЩИХ ОТ КОЛЕСА НА РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2720188C1 |
| Способ мониторинга технического состояния железнодорожного пути и устройство для его осуществления | 2021 |
|
RU2780704C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ И БОКОВЫХ СИЛ ВЗАИМОДЕЙСТВИЯ МЕЖДУ КОЛЕСОМ И РЕЛЬСОМ | 2015 |
|
RU2591739C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ И БОКОВЫХ СИЛ, ДЕЙСТВУЮЩИХ НА БОКОВУЮ РАМУ ТЕЛЕЖКИ ОТ КОЛЕСНОЙ ПАРЫ ПРИ ДВИЖЕНИИ ВАГОНА | 2020 |
|
RU2749445C1 |
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794739A1 |
| Устройство сбора информации и способ оценки результатов взаимодействия между колесом и рельсом | 2017 |
|
RU2682567C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2789106C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2009 |
|
RU2422784C1 |
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794740A1 |
Изобретение относится к метрологии и предназначено для одновременного измерения и регистрации трех компонентов суммарной нагрузки - вертикальной силы, боковой силы и опрокидывающего момента, действующих в выбранном поперечном сечении рельса при его контактном взаимодействии с колесом подвижного состава. Способ состоит в том, что с целью повышения точности измерения, тензорезисторы, наклеенные в четырех зонах шейки рельса, соединяют в три измерительных моста, каждый мост подключают к отдельному измерительному каналу тензометрической аппаратуры, градуировку выполняют по трехфакторному плану эксперимента комбинациями входных факторов - вертикальной силы, боковой силы и опрокидывающего момента. Градуировочные коэффициенты определяют умножением матрицы плана эксперимента на матрицу правую обобщенную обратную к матрице отклика, систематические погрешности измерений определяют как разницу между приложенными и восстановленными по отклику значениями факторов плана. Результаты измерения представляют в виде сочетания восстановленного по отклику значения входного фактора и максимального значения систематической погрешности, полученной при градуировке. Технический результат изобретения заключается в повышении точности измерений и уменьшении систематической погрешности измерений. 4 ил.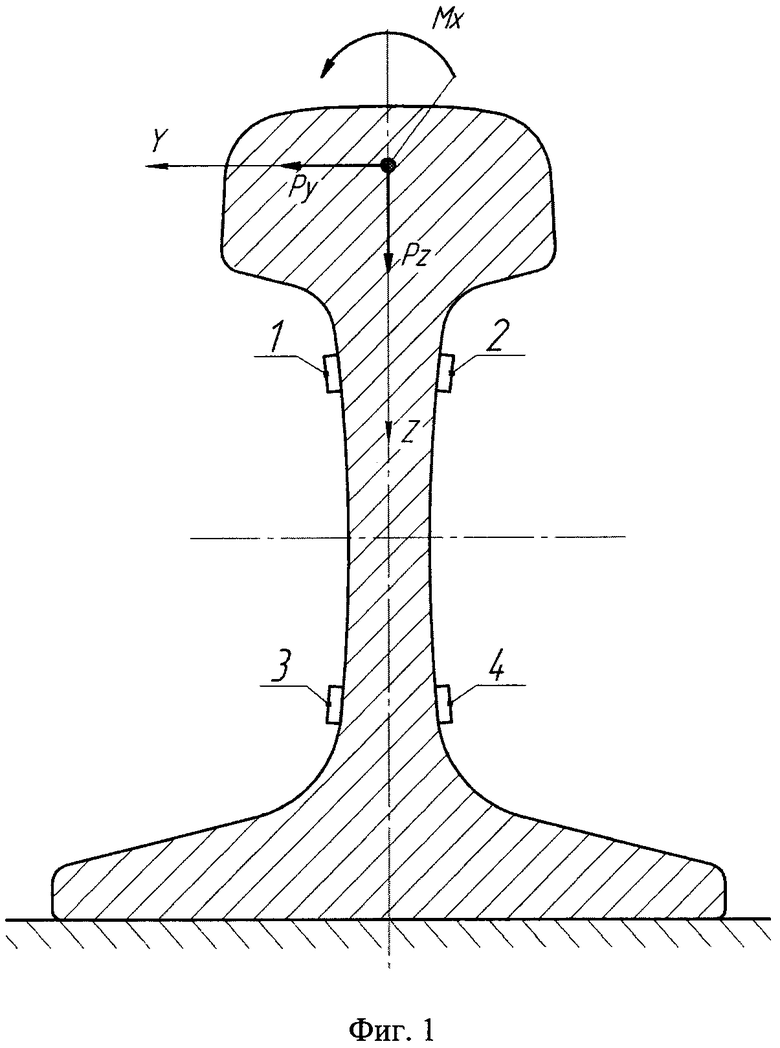
Способ измерения трех компонентов нагрузки в сечении рельса при контактном взаимодействии с колесом железнодорожного подвижного состава, включающий электрическое соединение наклеенных в зонах шейки рельса тензорезисторов в измерительные мосты, подключение мостов к входу измерительных каналов тензометрической аппаратуры, позволяющей регистрировать отклик в измерительных каналах на приращение входных факторов, градуировку измерительных каналов по определенному плану эксперимента с вычислением градуировочных коэффициентов и систематических погрешностей, визуальное представление результатов измерения, отличающийся тем, что тензорезисторы, наклеенные в четырех зонах шейки рельса, соединяют в три измерительных моста, каждый мост подключают к отдельному измерительному каналу тензометрической аппаратуры, градуировку выполняют по трехфакторному плану эксперимента комбинациями входных факторов - вертикальной силы, боковой силы и опрокидывающего момента, градуировочные коэффициенты определяют умножением матрицы плана эксперимента на матрицу правую обобщенную обратную к матрице отклика, систематические погрешности измерений определяют как разницу между приложенными и восстановленными по отклику значениями факторов плана, результаты измерения представляют в виде сочетания восстановленного по отклику значения входного фактора и максимального значения систематической погрешности, полученной при градуировке.
| Устройство для автоматического включения генераторов переменного тока на параллельную работу | 1937 |
|
SU55050A1 |
| Нормы допустимого воздействия на железнодорожный путь и методы испытаний, М., 01.07.2013 | |||
| Устройство для определения давления колеса на рельс | 1990 |
|
SU1794740A1 |
| 0 |
|
SU155518A1 | |
| DE 4439342 A1 09.05.1996. | |||

