Группа изобретений относится к техническим средствам охраны, способам обнаружения объектов, в том числе нарушителей, на охраняемой территории по создаваемым ими сейсмическим колебаниям и может быть использована для охраны участков местности и подступов к зданиям.
Известны устройство и способ обнаружения сейсмических сигналов (патент США №3,696,369, G08B 13/00, опубл. 03.10.1972). Способ обнаружения сигналов предложенным устройством реализован на основе подсчета количества импульсов (3 и более) во временном окне 4 с, при этом предварительная обработка заключается в аналоговой фильтрации в полосе 10-30 Гц сигнала, полученного с электродинамического преобразователя, учитывая, что фронт импульса полезного сигнала составляет 0,1 с.
Недостатком способа является низкое качество классификации сейсмического сигнала, так как импульсные сигналы помимо пешего нарушителя вызываются и транспортным средством, и мощной техногенной или природной помехой.
Известны способы обнаружения перемещающегося объекта на охраняемом рубеже, в которых регистрацию и классификацию сейсмических сигналов, формируемых объектом, осуществляют путем анализа частотного спектра принимаемых сейсмических сигналов (патент РФ №2365945, G08V 1/00, опубл. 27.08.2009; патент РФ №2165629, G08V 1/00, опубл. 20.04.2001), причем после обработки большого объема экспериментальных данных был сделан вывод, что спектры сейсмических сигналов не постоянны. Предложено, что «наиболее характерные» полосы частот для человека лежат в диапазоне от 5 до 25 Гц (патент РФ №2365945), от 15 до 25 Гц и от 35 до 50 Гц (патент РФ №2165629) и изменяются в течение года (различное состояние грунта в сезонах зима - лето) и влекут за собой изменение качества распознавания сигналов от различных объектов классификации.
Недостатком данных способов обнаружения перемещающегося объекта является то, что помеховый сейсмический сигнал может быть классифицирован как сигнал от нарушителя и наоборот.
При изменяющихся свойствах грунта качественное распознавание сейсмических сигналов от пешего нарушителя возможно лишь в результате анализа временной реализации сигнала на интервале времени, близком к минимальному времени преодоления охраняемой территории.
Наиболее близким аналогом предлагаемой группы изобретений является техническое решение (патент РФ №2212691, G01V 1/16, опубл. 20.09.2003), согласно которому адаптивное устройство обнаружения и классификации сейсмических сигналов содержит сейсмопреобразователь, схему автоматического регулирования усиления, блок выделения и обработки импульсных сигналов, блок классификации и блок адаптации к изменяющимся под воздействием метеоусловий параметров грунта. С помощью данного устройства реализуется способ обнаружения перемещающихся объектов, включающий преобразование сейсмического сигнала, автоматическое регулирование усиления сигнала, выделение и обработку импульсных сигналов, классификацию сигналов и адаптацию способа обработки сигналов к изменяющимся под воздействием метеоусловий параметрам грунта, причем адаптация производится с помощью тестового воздействия, по параметрам которого определяется величина поправочных коэффициентов для модели авторегрессии, используемой в классификаторе источников сейсмических сигналов, что позволяет повысить вероятность правильной классификации источников сейсмических сигналов.
Поскольку заранее невозможно точно сказать, в каком типе грунта будет установлено устройство, в прототипе предлагается проводить процедуру адаптации, а именно в конкретном месте установки периодически вычислять величину поправочных коэффициентов для модели авторегрессии. Кроме того, необходимо отметить, что в прототипе во фрагменте сейсмического сигнала длительностью 0,5 с и значениях автокорреляционной функции (АКФ) на первом, втором и третьем сдвигах нет усредненной информации о сейсмическом сигнале за время всего прохода сквозь зону обнаружения, который может длиться несколько десятков секунд. Таким образом, решение о присутствии объекта на охраняемой территории принимается лишь по трем значениям АКФ, что при частоте дискретизации 2 кГц, используемой в устройстве, соответствует сдвигам сигнала на 0,0015 с.
Недостатком известного из прототипа устройства является то, что адаптация сигналов осуществляется с помощью дополнительного блока адаптации к изменяющимся параметрам грунта. Блок адаптации состоит из схемы управления блоком адаптации, электромеханического вибратора, устанавливаемого в грунт, электронного коммутатора, схемы вычисления поправок коэффициентов авторегрессии и буфера временного хранения вычисленных коэффициентов. Блок адаптации усложняет конструкцию, процесс установки устройства, а также увеличивает энергопотребление устройства за счет наличия электромеханического вибратора и дополнительных схем. При возможном отказе электромеханического вибратора устройство оказывается неработоспособным, так как нарушается процедура периодического вычисления поправочных коэффициентов, которые используются в алгоритме распознавания сейсмических сигналов от различных объектов распознавания.
Техническим результатом предлагаемой группы изобретений является повышение вероятности обнаружения объектов, передвигающихся по охраняемой территории, при изменении климатических условий и, как следствие, изменении поглощающих свойств грунта.
Для достижения технического результата предложен способ обнаружения объекта, передвигающегося по охраняемой территории, включающий регистрацию и обработку формируемого объектом сейсмического сигнала, выделение в скользящем временном окне импульсов сейсмического сигнала заданной длительности, вычисление энергии сейсмического сигнала и сравнение полученных значений количества импульсов и энергии сейсмического сигнала с пороговыми значениями, причем при превышении пороговых значений дополнительно вычисляют АКФ сейсмического сигнала, определяют первое локальное максимальное и первое локальное минимальное значения АКФ, вычисляют выраженное в процентах отношение k разности упомянутых максимального и минимального значений к упомянутому максимальному значению, по заданному количеству отношений k определяют среднее арифметическое значение kср и по результатам сравнения полученного значения kср с пороговым принимают решение о факте передвижения объекта по охраняемой территории, при этом в процессе обработки коэффициент усиления последующего сейсмического сигнала определяют в соответствии со средним значением энергии предшествующего сейсмического сигнала в скользящем временном окне. В предпочтительном варианте осуществления предложенного способа первое локальное минимальное значение АКФ определяют по формуле Rmin=R(τmax/2), где τmax - сдвиг, соответствующий первому локальному максимальному значению автокорреляционной функции. Также в способе среднее арифметическое значение kср могут вычислять по количеству отношений k за все время передвижения объекта по охраняемой территории.
Для достижения технического результата предложено также устройство для осуществления вышеупомянутого способа обнаружения объекта, передвигающегося по охраняемой территории, состоящее из последовательно соединенных преобразователя сейсмических сигналов, предварительного усилителя, регулируемого усилителя, входного аналогового фильтра, блока цифровой обработки сейсмических сигналов, включающего последовательно соединенные аналого-цифровой преобразователь, цифровой полосовой фильтр, блок формирования скользящего временного окна, блок выделения импульсов сейсмического сигнала, блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала в скользящем временном окне, и блока принятия решения, причем в устройстве блок цифровой обработки сейсмических сигналов дополнительно содержит последовательно соединенные блок запуска вычислителя автокорреляционных функций, вычислитель автокорреляционных функций и анализатор формы автокорреляционных функций, при этом вход упомянутого блока запуска соединен с выходом блока подсчета количества импульсов заданной длительности и энергии сейсмических сигналов, упомянутый блок запуска соединен с регулируемым усилителем посредством управляющего канала, а выход анализатора формы автокорреляционных функций соединен с входом блока принятия решения. В предпочтительном варианте исполнения предложенного устройства блок принятия решения выполнен с возможностью выдачи тревожного сигнала. В устройстве блок формирования скользящего временного окна, блок выделения импульсов сейсмического сигнала, блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала и блок запуска вычислителя автокорреляционных функций могут быть объединены в блок подсистемы постоянного анализа сейсмических сигналов, а вычислитель автокорреляционных функций и анализатор формы автокорреляционных функций - в блок подсистемы автокорреляционного анализа сейсмических сигналов.
В предложенном способе после обработки полученного сейсмического сигнала непрерывно производится поиск сейсмических импульсов определенной длительности и вычисление энергии текущего сейсмического сигнала. При нахождении сейсмических импульсов заданной длительности, которые, возможно, вызваны передвижением объекта по охраняемой территории, вычисляются АКФ сейсмического сигнала. Сдвиг АКФ выполняется на величину, соответствующую наибольшему периоду следования сейсмических импульсов, определенному экспериментально при малой скорости движения нарушителя. Цель вычисления АКФ состоит в выявлении усредненных периодических характеристик от сейсмических сигналов, создаваемых объектом. В предложенном способе обнаружения происходит поиск и анализ неизменной характеристики движения объекта - периодических импульсных воздействий при соприкосновении объекта с поверхностью грунта. Данный процесс осуществляется за счет предложенного устройства и может быть реализован в двух его подсистемах - постоянного и автокорреляционного анализа сейсмических сигналов. Достоверность обнаружения в грунтах, имеющих различные поглощающие свойства, достигается за счет автоматического регулирования коэффициента усиления сейсмического сигнала в зависимости от среднего значения энергии предшествующего сейсмического сигнала в скользящем временном окне.
Предлагаемые устройство и способ обнаружения объектов, передвигающихся по охраняемой территории, обеспечивают повышение вероятности обнаружения, т.к. обеспечивают анализ существенно большей, чем в прототипе, длительности передвижения объекта по охраняемой территории. В частном случае исполнения, улучшающем достигнутый технический результат, происходит анализ всей длительности передвижения сквозь зону обнаружения. Таким образом, уменьшается вероятность ложного срабатывания устройства в связи с регистрацией сейсмических импульсов от случайных помех.
Предлагаемая группа изобретений иллюстрируются чертежами:
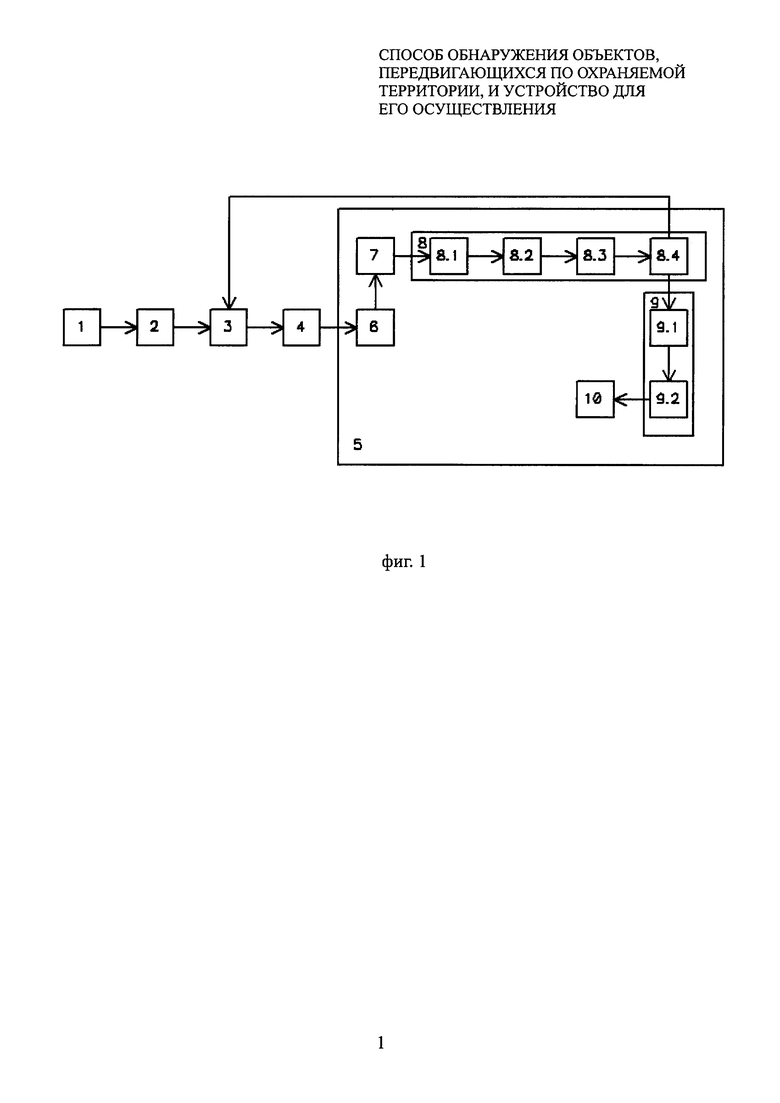
На фиг. 1 представлена структурная схема частного случая исполнения устройства для осуществления способа обнаружения нарушителей, передвигающихся по охраняемой территории.
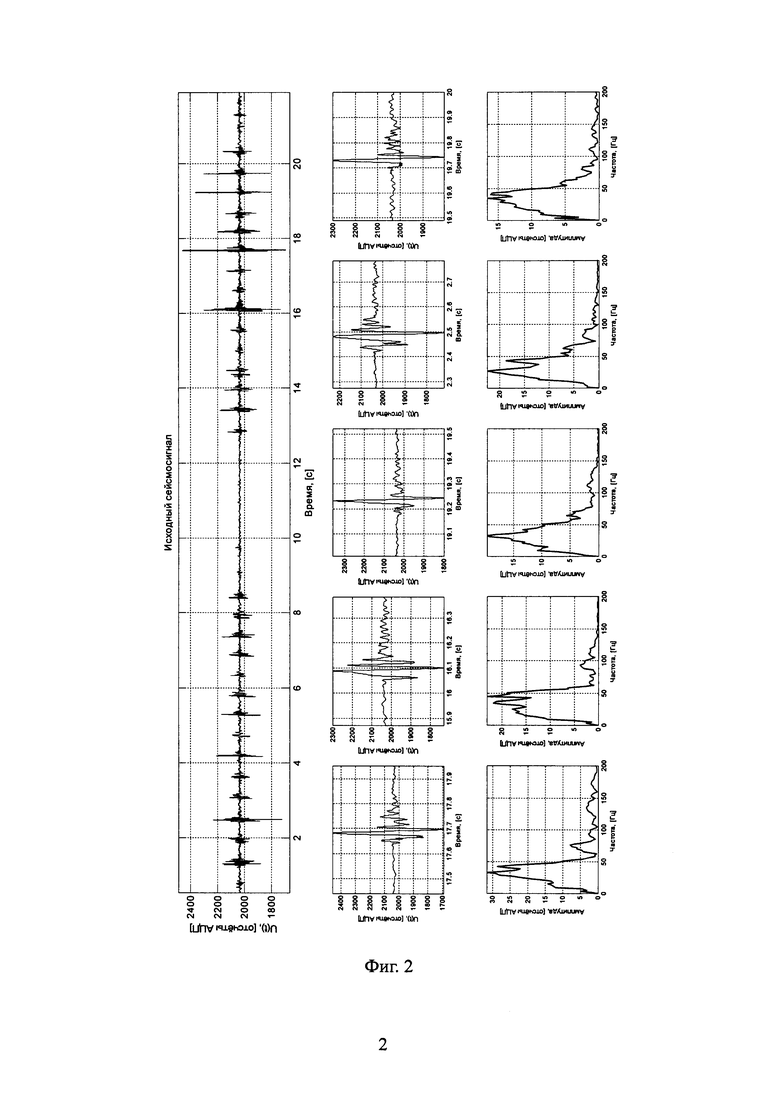
На фиг. 2 представлена запись сейсмосигнала при полевых испытаниях предложенного устройства в грунте типа «Суглинок», где выполнено удаление от устройства на расстояние 20 м и затем приближение к устройству с этого расстояния. В верхнем ряду представлен исходный сейсмосигнал. Во втором и третьем ряду в увеличенном масштабе представлены фрагменты сейсмосигнала длительностью 0,5 с, содержащие сейсмические импульсы, и соответствующие этим фрагментам спектры.
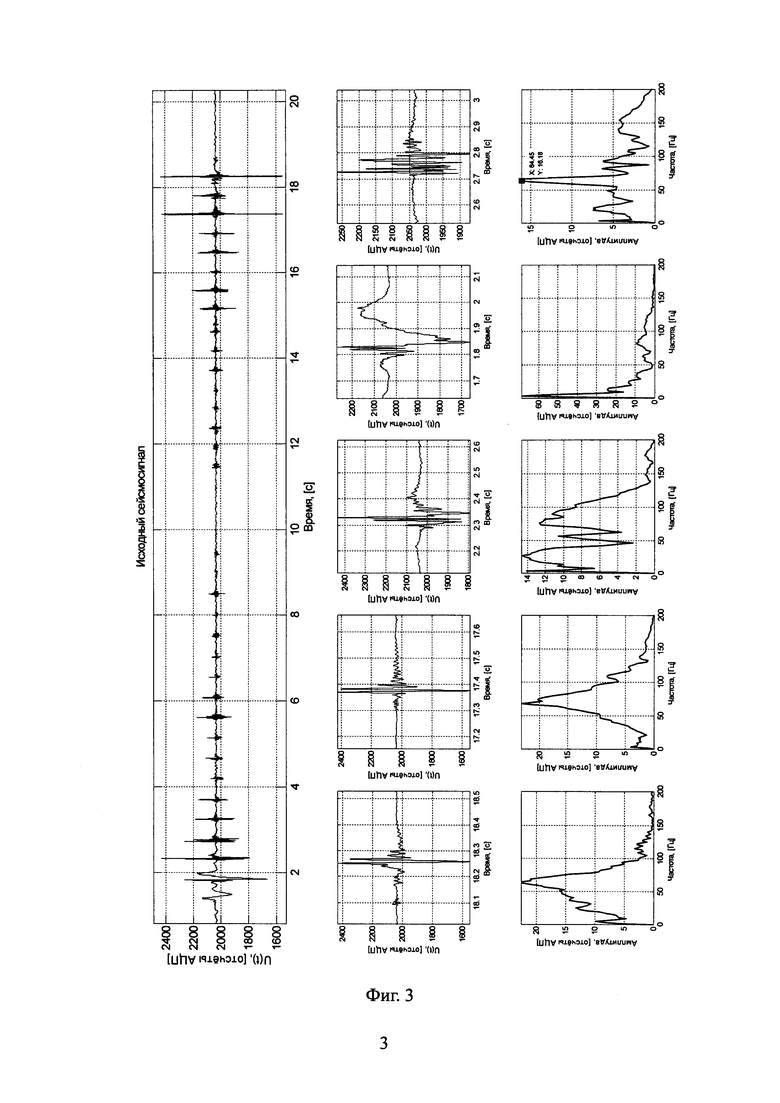
На фиг. 3 представлена запись сейсмосигнала при полевых испытаниях устройства в грунте типа «Песок», где выполнено удаление от устройства на расстояние 20 м и затем приближение к устройству с этого расстояния. В верхнем ряду представлен исходный сейсмосигнал. Во втором и третьем ряду в увеличенном масштабе представлены фрагменты сейсмосигнала длительностью 0,5 с, содержащие сейсмические импульсы, и соответствующие этим фрагментам спектры.
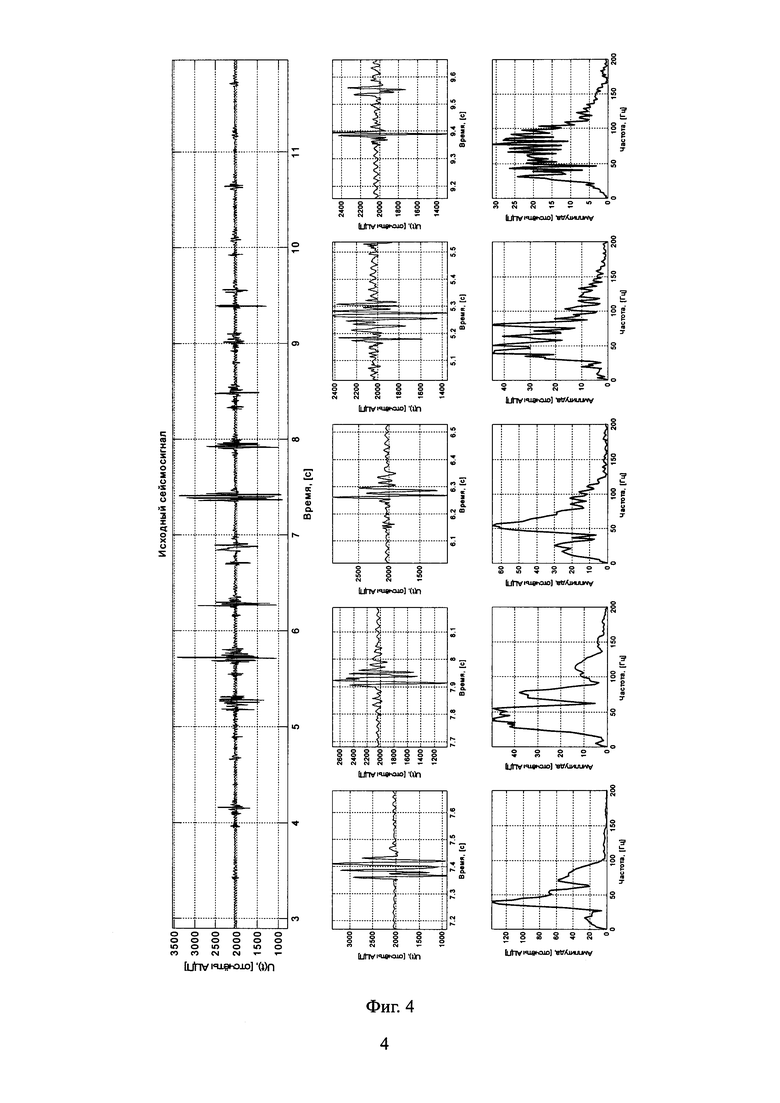
На фиг. 4 представлена запись сейсмосигнала при полевых испытаниях устройства в снежном покрове глубиной от 0,35 до 0,40 м, где выполнен проход мимо устройства на удалении 5 м от места установки. В верхнем ряду представлен исходный сейсмосигнал. Во втором и третьем ряду в увеличенном масштабе представлены фрагменты сейсмосигнала длительностью 0,5 с, содержащие сейсмические импульсы, и соответствующие этим фрагментам спектры.
На фиг. 2-4 верхние графики иллюстрируют сейсмические сигналы при прямолинейном пешем движении одиночного объекта.
На фиг. 5 представлено семейство автокорреляционных функций сейсмосигнала длительностью 5 с со сдвигом 1,2 с, вычисленных по мере движения объекта в зоне обнаружения. Скорость движения объекта примерно 3,0-3,3 м/с.
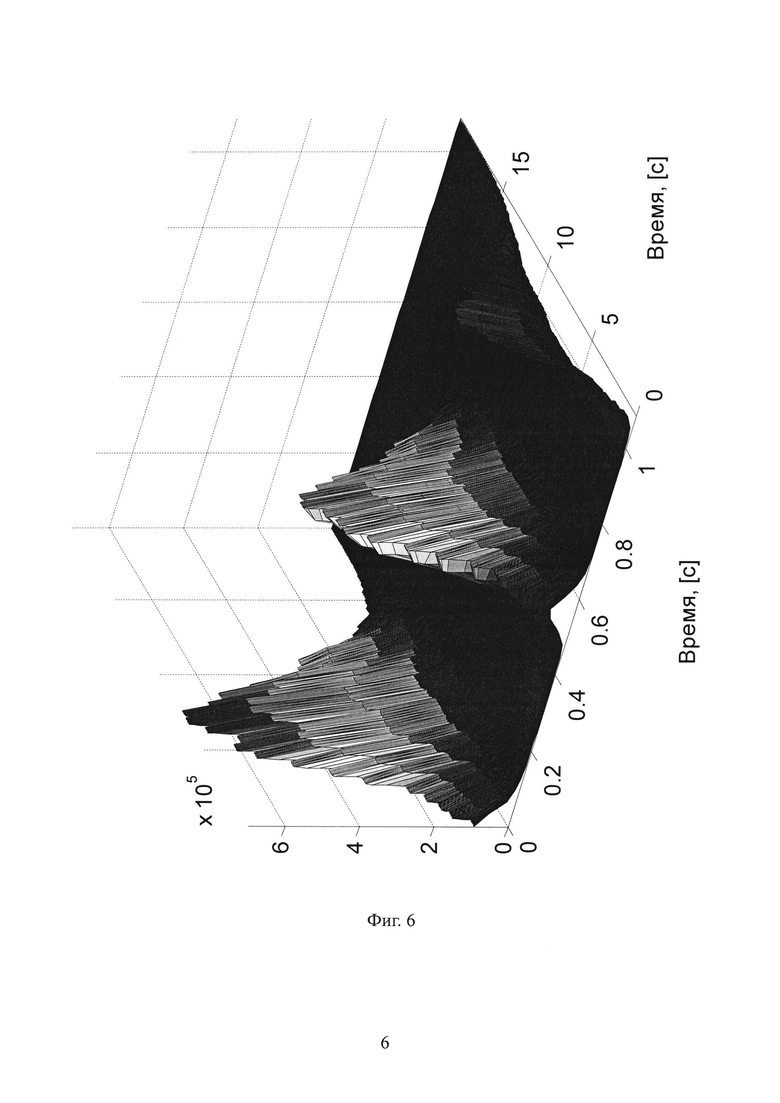
На фиг. 6 представлено семейство автокорреляционных функций сейсмосигнала длительностью 5 с со сдвигом 1,2 с, вычисленных по мере движения объекта в зоне обнаружения. Скорость движения объекта примерно 1,2-1,3 м/с.
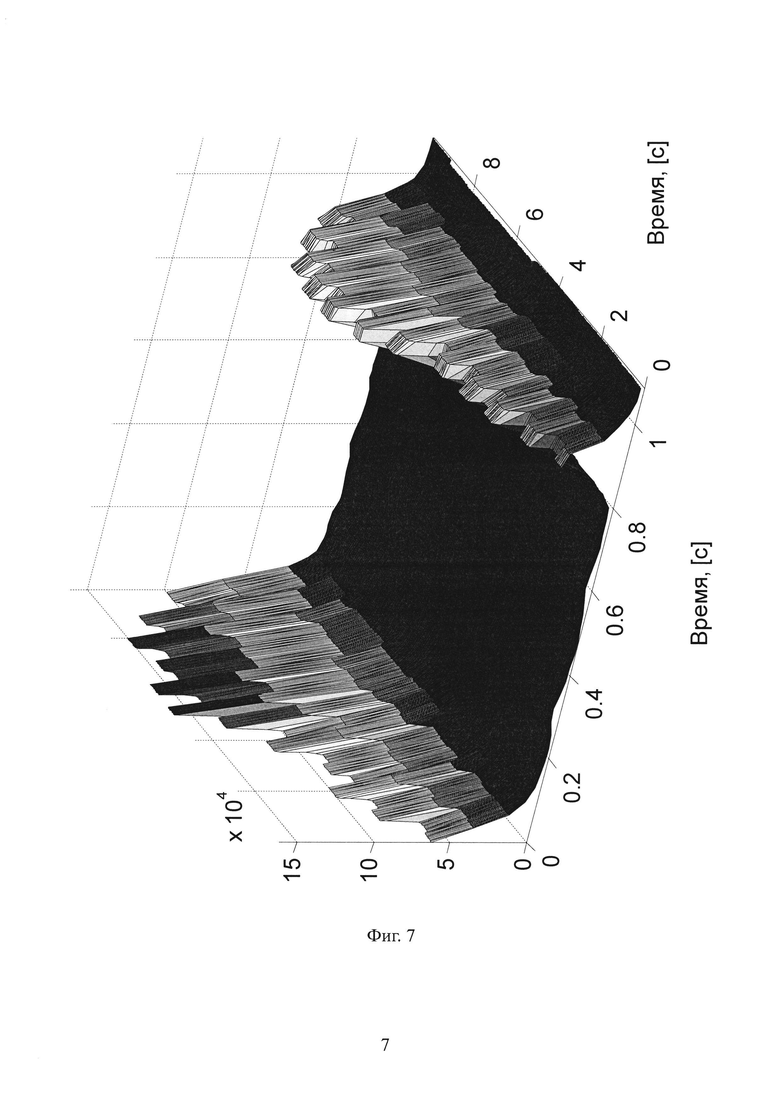
На фиг. 7 представлено семейство автокорреляционных функций сейсмосигнала длительностью 5 с со сдвигом 1,2 с, вычисленных по мере движения объекта в зоне обнаружения. Скорость движения объекта примерно 0,6-0,7 м/с.
Устройство для осуществления способа обнаружения объектов, передвигающихся по охраняемой территории, содержит (фиг. 1): (1) - преобразователь сейсмического сигнала в электрический; (2) - предварительный усилитель; (3) - регулируемый усилитель; (4) - входной аналоговый фильтр; (5) - блок цифровой обработки сейсмических сигналов (включает в себя все последующие блоки); (6) - аналого-цифровой преобразователь; (7) - цифровой полосовой фильтр; (8.1) - блок формирователя скользящего временного окна w длительности Т с; (8.2) - блок выделения импульсов сейсмического сигнала; (8.3) - блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала в скользящем временном окне w; (8.4) - блок запуска вычислителя автокорреляционных функций; (9.1) - вычислитель автокорреляционных функций; (9.2) - анализатор формы автокорреляционных функций; (10) - блок принятия решения. В частном случае блоки (8.1) - (8.4) могут быть объединены в блок подсистемы постоянного анализа сейсмических сигналов (8), а блоки (9.1) и (9.2) могут быть объединены в блок подсистемы автокорреляционного анализа сейсмических сигналов (9).
Предложенное устройство работает следующим образом. Выход преобразователя сейсмического сигнала в электрический (1) соединен с входом предварительного усилителя (2). Преобразованный и усиленный сейсмический сигнал подается на вход регулируемого усилителя (3), коэффициент усиления которого может меняться в диапазоне от 1 до 10 с точностью 0,4%. После прохождения двух каскадов усиления сейсмический сигнал пропускается через аналоговый низкочастотный фильтр (4), имеющий частоту среза 200 Гц, для подавления высокочастотного шума перед аналого-цифровым преобразованием. Выход фильтра (4) соединен с блоком цифровой обработки (5), а именно с входом аналого-цифрового преобразователя (АЦП) (6). После преобразования с частотой дискретизации 500 Гц аналогового сейсмического сигнала в цифровой, для увеличения отношения сигнал/шум, сигнал подается на вход цифрового фильтра (7) с полосой пропускания от 20 до 80 Гц. Полоса пропускания аналогового фильтра (4) выбрана, исходя из теоремы Котельникова, а цифрового фильтра (7) - исходя из статистического анализа экспериментальных сейсмических сигналов от проходов сквозь зону обнаружения объекта с различными скоростями, полученных авторами в различных типах грунта и при различных климатических условиях.
Отфильтрованный цифровой сейсмический сигнал сохраняется в оперативной памяти блока цифровой обработки (5), формируется скользящее временное окно w, длительность которого может быть выбрана, исходя из емкости оперативной памяти блока (5), например, 5 с. Блок (8.2) выделяет в окне w сейсмические импульсы. Далее в блоке (8.3) происходит поиск и подсчет сейсмических импульсов, находящихся в окне w, шириной не менее 0,1 с и не более 0,3 с (такая длительность единичного сейсмического импульса от пешего нарушителя выбрана, исходя из анализа экспериментальных данных). Также в блоке (8.3) вычисляется энергия текущего сейсмического сигнала в окне w. Результаты вычислений блока (8.3) - количество импульсов и энергия текущего сейсмического сигнала - передаются в блок (8.4), который, сравнивая их с пороговыми значениями, при их превышении запускает работу вычислителя автокорреляционных функций (9.1). Также блок (8.4) на основе информации о средней энергии сейсмического сигнала управляет коэффициентом усиления регулируемого усилителя (3), поддерживая заданное среднее значение энергии сейсмического сигнала.
В блоке (9.1) для определения периодичности следования сейсмических импульсов начинается вычисление АКФ текущего сейсмического сигнала, находящегося во временном окне w. Вычисление АКФ выполняется со сдвигом τ секунд. Далее в блоке (9.2) анализируется форма каждой АКФ: происходит поиск первого (нецентрального) локального максимума (Rmax) и минимума (Rmin). Исходя из анализа экспериментальных данных, минимум находится на середине интервала от 0 до τmах, т.е. Rmin=R(τmax/2), где τmax - сдвиг, соответствующий первому локальному максимальному значению АКФ. Rmin также может быть определен методом перебора значений АКФ. Для анализа формы АКФ вычисляется коэффициент k - отношение, выраженное в процентах, по формуле  .
.
Частота следования шагов, совершаемых объектом при передвижении по охраняемой территории, возрастает с увеличением скорости движения. Экспериментально было выявлено, что даже при малой скорости движения (от 0,5 до 0,6 м/с) частота следования шагов не меньше чем 1 шаг в секунду. В качестве примера на фиг. 5-7 представлены семейства АКФ, вычисленные по мере перемещения скользящего временного окна w, для разных скоростей движения объекта по охраняемой территории. Из графиков видно, что периодичность следования сейсмических импульсов по АКФ можно определить как 0,3 с (фиг. 5), 0,6 с (фиг. 6), 0,9 с (фиг. 7). Всего за время прохода объекта по охраняемой территории вычисляется N автокорреляционных функций. Размерность N, в принципе, может быть любой и ограничивается только производительностью вычислителя (9.1) и емкостью оперативной памяти блока (5).
Текущее значение коэффициента k передается в блок (10), который сохраняет его в оперативной памяти и формирует последовательность из коэффициентов k, обновляемых по мере движения объекта по охраняемой территории. Для принятия решения о присутствии объекта на данной территории в блоке (10) по заданному количеству k выполняется вычисление среднего арифметического значения kср и сравнение этого значения с заданным пороговым значением, при превышении которого может выдаваться сигнал «Тревога». Заданное значение k определяется в соответствии с площадью и контуром охраняемой территории. Также количество значений k может подсчитываться и усредняться за все время прохода объекта по охраняемой территории, то есть пока в скользящем временном окне находятся сейсмические импульсы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ТЕКУЩЕГО МЕСТОПОЛОЖЕНИЯ НАРУШИТЕЛЯ ОХРАНЯЕМОЙ ЗОНЫ | 2005 |
|
RU2311686C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2543930C2 |
| СЕЙСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ | 2014 |
|
RU2565364C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |

Группа изобретений относится к техническим средствам охраны, способам обнаружения объектов, в том числе нарушителей, на охраняемой территории по создаваемым ими сейсмическим колебаниям и может быть использована для охраны участков местности и подступов к зданиям. Предложен способ обнаружения объекта, передвигающегося по охраняемой территории, включающий регистрацию и обработку формируемого объектом сейсмического сигнала, выделение в скользящем временном окне импульсов сейсмического сигнала заданной длительности, вычисление энергии сейсмического сигнала и сравнение полученных значений количества импульсов и энергии сейсмического сигнала с пороговыми значениями. Причем при превышении пороговых значений дополнительно вычисляют АКФ сейсмического сигнала, определяют первое локальное максимальное и первое локальное минимальное значения АКФ, вычисляют выраженное в процентах отношение k разности упомянутых максимального и минимального значений к упомянутому максимальному значению. По заданному количеству отношений k определяют среднее арифметическое значение kср и по результатам сравнения полученного значения kср с пороговым принимают решение о факте передвижения объекта по охраняемой территории. При этом в процессе обработки коэффициент усиления последующего сейсмического сигнала определяют в соответствии со средним значением энергии предшествующего сейсмического сигнала в скользящем временном окне. Предложено также устройство для осуществления вышеупомянутого способа обнаружения объекта, передвигающегося по охраняемой территории, состоящее из последовательно соединенных преобразователя сейсмических сигналов, предварительного усилителя, регулируемого усилителя, входного аналогового фильтра, блока цифровой обработки сейсмических сигналов, включающего последовательно соединенные аналого-цифровой преобразователь, цифровой полосовой фильтр, блок формирования скользящего временного окна, блок выделения импульсов сейсмического сигнала, блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала в скользящем временном окне, и блока принятия решения. Причем в устройстве блок цифровой обработки сейсмических сигналов дополнительно содержит последовательно соединенные блок запуска вычислителя автокорреляционных функций, вычислитель автокорреляционных функций и анализатор формы автокорреляционных функций, при этом вход упомянутого блока запуска соединен с выходом блока подсчета количества импульсов заданной длительности и энергии сейсмических сигналов, упомянутый блок запуска соединен с регулируемым усилителем посредством управляющего канала, а выход анализатора формы автокорреляционных функций соединен с входом блока принятия решения. Технический результат - повышение вероятности обнаружения объектов, передвигающихся по охраняемой территории, при изменении климатических условий и, как следствие, изменении поглощающих свойств грунта. 2 н. и 5 з.п. ф-лы, 7 ил.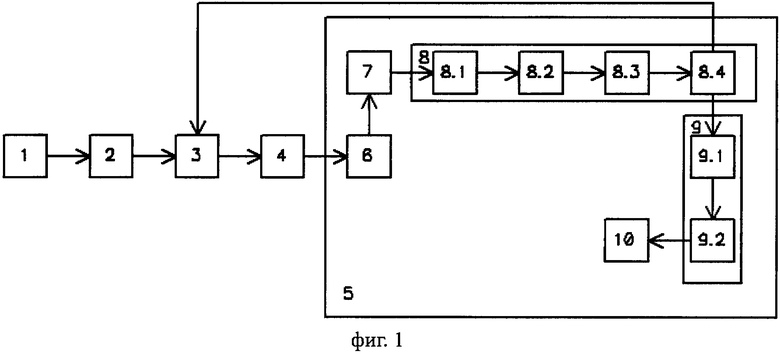
1. Способ обнаружения объекта, передвигающегося по охраняемой территории, включающий регистрацию и обработку формируемого объектом сейсмического сигнала, выделение в скользящем временном окне импульсов сейсмического сигнала заданной длительности, вычисление энергии сейсмического сигнала и сравнение полученных значений количества импульсов и энергии сейсмического сигнала с пороговыми значениями, отличающийся тем, что при превышении пороговых значений дополнительно вычисляют автокорреляционную функцию сейсмического сигнала, определяют первое локальное максимальное и первое локальное минимальное значения автокорреляционной функции, вычисляют выраженное в процентах отношение k разности упомянутых максимального и минимального значений к упомянутому максимальному значению, по заданному количеству отношений k определяют среднее арифметическое значение kср и по результатам сравнения полученного значения kср с пороговым принимают решение о факте передвижения объекта по охраняемой территории, при этом в процессе обработки коэффициент усиления последующего сейсмического сигнала определяют в соответствии со средним значением энергии предшествующего сейсмического сигнала в скользящем временном окне.
2. Способ обнаружения объекта, передвигающегося по охраняемой территории по п. 1, отличающийся тем, что первое локальное минимальное значение автокорреляционной функции определяют по формуле Rmin=R(τmax/2), где τmax - сдвиг, соответствующий первому локальному максимальному значению автокорреляционной функции.
3. Способ обнаружения объекта, передвигающегося по охраняемой территории по п. 1, отличающийся тем, что среднее арифметическое значение kср вычисляют по количеству отношений k за все время передвижения объекта по охраняемой территории.
4. Устройство для осуществления способа по п. 1, состоящее из последовательно соединенных преобразователя сейсмических сигналов, предварительного усилителя, регулируемого усилителя, входного аналогового фильтра, блока цифровой обработки сейсмических сигналов, включающего последовательно соединенные аналого-цифровой преобразователь, цифровой полосовой фильтр, блок формирования скользящего временного окна, блок выделения импульсов сейсмического сигнала, блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала в скользящем временном окне, и блока принятия решения, отличающееся тем, что блок цифровой обработки сейсмических сигналов дополнительно содержит последовательно соединенные блок запуска вычислителя автокорреляционных функций, вычислитель автокорреляционных функций и анализатор формы автокорреляционных функций, при этом вход упомянутого блока запуска соединен с выходом блока подсчета количества импульсов заданной длительности и энергии сейсмических сигналов, упомянутый блок запуска соединен с регулируемым усилителем посредством управляющего канала, а выход анализатора формы автокорреляционных функций соединен с входом блока принятия решения.
5. Устройство по п. 4, отличающееся тем, что блок принятия решения выполнен с возможностью выдачи тревожного сигнала.
6. Устройство по п. 4, отличающееся тем, что блок формирования скользящего временного окна, блок выделения импульсов сейсмического сигнала, блок подсчета количества импульсов заданной длительности и энергии сейсмического сигнала и блок запуска вычислителя автокорреляционных функций объединены в блок подсистемы постоянного анализа сейсмических сигналов.
7. Устройство по п. 4, отличающееся тем, что вычислитель автокорреляционных функций и анализатор формы автокорреляционных функций объединены в блок подсистемы автокорреляционного анализа сейсмических сигналов.
| АДАПТИВНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2212691C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| US 3696369 A, 03.10.1972 | |||
| US 4975891 A, 04.12.1990 | |||
| US 7573384 B2, 11.08.2009. | |||

