Изобретение относится к области сейсмической разведки и может быть использовано в охранных и разведывательно-сигнализационных комплексах и системах для обработки сейсмических сигналов, генерируемых подвижными объектами наземной техники в поверхностном слое почвы, с целью обнаружения этих объектов.
Обнаружение объектов наземной техники по результатам механического воздействия их на грунт во время движения осуществляется с использованием преобразования различных типов сейсмических колебаний, возбуждаемых объектами наземной техники в грунте, в электрический сигнал. Анализ подобных сейсмосигналов может осуществляться в сейсмоприёмниках различных типов, функционирование которых основано на различных физических принципах: электромагнитном, емкостном, тензорезистивном, пьезорезистивном, магнитоэлектрическом, волоконно-оптическом, пьезоэлектрическом или комбинированном. Ввиду простоты конструкции и низкой стоимости наибольшее практическое использование получили электромагнитные и пьезоэлектрические сейсмоприемники [1-4]. При этом у них отмечаются достаточно высокие уровни собственных шумов, чувствительность к внешним помехам, а также недостаточно широкий диапазон рабочих частот. В связи с этим всё большее распространение получают так называемые датчики крутильных колебаний [5-9]. Они изготавливаются с использованием молекулярно-электронной технологии, нечувствительны к чисто поступательным движениям и, наоборот, обладают высокой чувствительностью к вращательной составляющей сейсмических колебаний. Хорошим качеством молекулярно-электронных сейсмодатчиков является то, что у них очень низкий уровень собственных шумов. Сейсмосигналы любых типов являются колебательными процессами, аналитическое формализованное описание которых фактически одинаково. Следовательно, формально допустимо использовать в качестве аналогов любые подходящие способы обнаружения или классификации подвижных объектов наземной техники, независимо от того, какие типы сейсмических колебаний в них используются.
Молекулярно-электронные сейсмодатчики, как правило, имеют две пары электродов, помещенных в замкнутый канал, заполненный электролитом. Под действием инерциальных сил жидкий электролит движется внутри канала между электродами, вызывая вариации величины токов между ними. Изменения электродных токов в преобразующих элементах датчиков являются аналоговыми сигналами на их выходах. Однако, по причине того, что в практической области молекулярно-электронные сейсмодатчики используются не так широко, как электромагнитные и/или пьезоэлектрические, то и сведений о вариантах их применения не так много.
Варианты использования молекулярно-электронных сейсмодатчиков приведены, например, в [10 - 13]. При этом в [10] зарегистрированный сейсмосигнал обрабатывается в сейсмоприёмнике только с целью разделения сейсмических волн по типам. В [12] в составе сейсмического комплекса быстрого развертывания три молекулярно-электронных сейсмических датчика обеспечивают одновременную регистрацию и обработку всех трех компонент сейсмического сигнала в широком частотном диапазоне с высоким отношением сигнал/шум с целью обнаружения человека-нарушителя и определения направления на него. В статье [13] также описан способ определения направления на движущегося человека-нарушителя с использованием сигналов с трёх выходов сейсмического модуля, содержащего три молекулярно-электронных датчика с взаимно ортогональными осями чувствительности. Таким образом, как в [10-12], так и в [13], где описаны способы обработки сейсмосигналов, поступающих с выходов молекулярно-электронных датчиков, непосредственно способы обнаружения подвижных объектов наземной техники не представлены.
При этом варианты способов обнаружения подвижных объектов наземной техники, в которых используются сейсмосигналы с выходов электромагнитных и/или пьезоэлектрических сейсмоприемников, представлены во многих научно-технических источниках. В частности, существуют варианты обработки сейсмосигнала в нескольких выделенных частотных полосах. Например, в [14] и [15] описана работа устройств, характеризующая способы обнаружения движущихся объектов в контролируемой зоне, характерной особенностью которых является то, что после регистрации сейсмических колебаний, возникающих в результате движения объектов, обработка этих колебаний осуществляется в двух частотных полосах (15 - 25) Гц и (35 - 50) Гц (в [14]). В [15] предложен способ обнаружения объектов, в котором обработка сейсмосигналов ведётся с использованием низкочастотной полосы (5 - 25) Гц и высокочастотной составляющей, формируемой специальным образом в области частот (100 - 150) Гц.
В [14] определяют спектры зарегистрированных сейсмических сигналов и по изменению соотношения высокочастотных и низкочастотных составляющих в процессе обработки, которая ограничивается сопоставлением амплитуд результирующих колебаний, образованных спектральными составляющими, выявляют факт наличия изменений в частотных полосах сигнала. Далее на основании выявленных отличий в соответствии с определенным правилом принимают решение об обнаружении объекта в контролируемой зоне.
К основным недостаткам реализации данного способа можно отнести:
- ограниченность функциональных возможностей реализующего этот способ устройства вследствие низкой эффективности обработки сигнала, что ограничивает область его применения;
- слабая устойчивость устройства, реализующего регистрацию и обработку поступающих на его вход сейсмических колебаний, к изменению уровня внешних помеховых или погодно-климатических условий, так как в этом случае состав частотных составляющих в каждой из полос будет изменяться в отсутствии объекта, что приведёт к резкому росту числа ложных обнаружений.
В [15] полоса низких частот составляет (5 - 25) Гц, а вместо полосы высоких частот предложено использовать формирование числа экстремумов сейсмоколебания за определенный интервал времени. Этой операцией выделяют высокочастотную составляющую сейсмического сигнала, что функционально почти эквивалентно выделению полосы высоких частот в районе (100 - 150) Гц. Формирование числа экстремумов и высокочастотной составляющей сейсмосигнала заключается в том, что на длительности скользящего временного окна Δt с подсчитывается количество положительных и отрицательных экстремумов. Затем это количество делится на длительность временного скользящего окна Δt с, которая примерно равна длительности сейсмосигнала. Далее временное окно периодически смещается на отрезок времени δt с и вновь оценивается величина высокочастотной составляющей сейсмосигнала.
Сущность предлагаемого способа заключается в регистрации сейсмического сигнала от объекта, формировании средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала. Принятие решения об обнаружении объекта производится по анализу величины отношения средневзвешенной частоты спектра в низкочастотной полосе к высокочастотной составляющей сейсмосигнала.
Здесь основным недостатком будет являться зависимость числа положительных и отрицательных экстремумов от изменения уровня внешних помеховых или погодно-климатических условий, что будет приводить к изменению значения высокочастотной составляющей сейсмосигнала в отсутствии объекта. Это также отрицательно повлияет либо на увеличение числа ложных обнаружений, либо приведёт к пропуску полезного сигнала.
В [16] для повышения устойчивости сейсмосигнала к изменению сейсмического фона в неблагоприятных условиях предлагается использовать адаптивный (следящий) порог, значение которого будет зависеть от конкретных условий эксплуатации реализующего способ устройства. Сущность этого способа заключается в следующем. Следящий порог состоит из двух слагаемых – адаптивной и постоянной составляющих.
Введение следящего порога эквивалентно использованию другого информативного признака – скорости изменения отношения средневзвешенной частоты спектра в полосе низких частот полезного сейсмосигнала и его высокочастотной составляющей. Постоянная составляющая следящего порога вводится для обеспечения высокой помехоустойчивости.
За время скользящего прямоугольного окна выполняется преобразование Фурье и находится значение модуля амплитуды каждой гармоники. Длительность временного окна равна Δt с, а его смещение – δt с (между n-м и n-1-м временными окнами). Далее осуществляется вычисление средневзвешенной частоты в полосе низких частот полезного сейсмосигнала (5 - 25) Гц.
Для определения высокочастотной составляющей в области частот (100-150) Гц первоначально подсчитывается количество положительных и отрицательных экстремумов во временной области входного сейсмосигнала на длительности скользящего временного окна Δt с, и количество экстремумов делится на длительность скользящего временного окна Δt с. Затем находится отношение средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала и определяется значение следящего порога с учетом значений отношения средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала за время анализируемого n-го и предыдущего (n-1)-го временного окна. Значение следящего порога предлагается формировать по следующему правилу:
1) АСПn=АСПn-1+ΔАСП, если ИПn >ИПn-1 или АСПn=АСПn-1, если ИПn ≤ ИПn-1;
2) АСПn=ИПn, если ИПn < АСПn;
3) СПn=АСПn+ПСП,
где
АСП n, АСПn-1 - значения адаптивной составляющей следящего порога в n-м и (n-1)-м временном окне анализа соответственно;
ΔАСП - приращение адаптивной составляющей следящего порога;
ИП n, ИПn-1 - значения информативного признака в n-м и (n-1)-м временном окне анализа соответственно;
СП n - значение следящего порога в n-ом временном окне анализа;
ПСП - постоянная составляющая следящего порога.
Начальное значение следящего порога фиксируется. Вычисленное значение текущего следящего порога сравнивается с текущим значением отношения средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала. При превышении следящего порога принимается решение об обнаружении объекта.
Для помеховых сейсмосигналов отношения средневзвешенных частот в полосе частот (5 - 25) Гц и высокочастотных составляющих мало изменяются по величине, в то время как эти характеристики для полезных сейсмосигналов в достаточной степени трансформируются по величине, на чём базируется сущность данного способа.
К основному его недостатку можно отнести то, что при достаточно низких отрицательных температурах количество высокочастотных гармоник в обеих спектральных полосах увеличится, их амплитуды возрастут. В то время, как количество низкочастотных компонент в обеих полосах частот уменьшится, а амплитуды оставшихся уменьшатся. Следовательно, отношение средневзвешенных частот при воздействии полезных сейсмосигналов в полосе частот (5 - 25) Гц и их высокочастотных составляющих (а также и скорости изменения этого отношения) будет искажено таким образом, что её форма может потерять явно выраженный максимум. Это может привести к пропуску полезного сейсмосигнала (необнаружению объекта наземной техники). С другой стороны, в глинистой или болотистой местности, а также после проливного дождя поверхностный слой почвы становится более рыхлым, что может привести к снижению в обеих частотных полосах количества высокочастотных составляющих и к увеличению в них количества низкочастотных компонент. Значит, отношение средневзвешенных частот при воздействии помеховых сейсмосигналов в полосе частот (5 - 25) Гц и их высокочастотных составляющих (а также и скорости изменения этого отношения) будет искажено таким образом, что её форма может приобрести явно выраженный максимум. В этом случае может реализоваться ложное обнаружение объекта наземной техники.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [17], принятый за прототип.
В способе-прототипе обнаружение сигнала осуществляется в полосе пропускания, согласованной со спектром сигнала в целом (15 - 50) Гц, а не с его отдельными частями (15 - 25) Гц и (35 - 50) Гц. Это достигается тем, что результирующее колебание представляют, как колебание, имеющее амплитудную и угловую (частотную) модуляцию. Для наглядности это иллюстрируется на примере двух частот следующим образом.
1. Аналоговые сигналы подвергают фильтрации в полосе (15 - 50) Гц.
2. Посредством подсчёта числа пересечений сейсмическим колебанием нулевого уровня в низкочастотной и высокочастотной частях спектра определяют две частоты ω1 и ω2.
3. Находят их разность 
4. Результирующее колебание задаётся напряжением Upeз(t), образуется выбранными частотами и может быть представлено в виде суммы двух гармоник с амплитудами Um1 и Um2 соответственно

где 
Текущая частота за период, величина которого определяется частотой модуляции Δω, всегда в среднем будет больше частоты ω1, а это значит, что на заданном интервале усреднения, а не только на текущем периоде она также будет больше частоты ω1. Внешнее воздействие в среднем изменяет частоту на заданном интервале усреднения, что сразу же влечет за собой изменение у колебания числа пересечений нулевого уровня, которое характеризует либо полезный сигнал (обнаружение объекта), либо помеху, так как увеличение числа нулей эквивалентно увеличению частоты в среднем на заданном интервале усреднения.
5. Выбирают порог между частотами ω2 и ω1, который задаётся некоторым заранее определённым числом нулей на интервале усреднения, чем обеспечивается решение задачи селекции помеховых сигналов и обнаружение полезных, не только для ситуаций, когда их спектры отличаются значением М своих спектральных составляющих, но и в тех случаях, когда при одинаковом значении индекса М различие в спектрах определяется положением спектральных составляющих на частотной оси.
Очевидно, что девиация частоты ωд определяется не только соотношением амплитуд спектральных составляющих, но посредством частоты модуляции Δω зависит еще и от расположения этих спектральных составляющих на частотной оси. При этом она увеличивается с ростом Δω при фиксированной величине индекса амплитудной модуляции М. Следовательно, девиация частоты ωд является более информативным параметром, чем индекс М, который определяется лишь соотношением амплитуд спектральных составляющих. Таким образом, величина девиации характеризует влияние на результат как индекса М (вклад амплитудных соотношений спектральных составляющих), так и девиации Δω (вклад, учитывающий взаимное расположение этих спектральных составляющих на оси частот).
Основным недостатком, присущим способу-прототипу является зависимость числа пересечений нулевого уровня сейсмическим колебанием от изменения уровня внешних помеховых или погодно-климатических условий, что будет приводить к изменению состава частотных составляющих в каждой из полос спектра даже в отсутствии объекта. А это отрицательно повлияет на величину выставляемого порога, и может обеспечить прирост числа ложных обнаружений, либо привести к пропуску полезного сигнала (к необнаружению объекта, движущегося в зоне контроля). Следовательно, в рабочей полосе частот на протяжении всей обработки сейсмосигнала необходимо минимизировать отрицательное влияние внешних помеховых и погодно-климатических факторов.
Задача – повышение вероятности правильного обнаружения подвижных объектов наземной техники.
Для решения поставленной задачи в способе обнаружения движущихся объектов наземной техники по сейсмическому сигналу, возбуждаемому подвижным объектом наземной техники в поверхностном слое почвы, включающем регистрацию этого сейсмосигнала, преобразование его в два электрических сигнала, их усиление и фильтрацию в заданной полосе частот, согласно изобретению, усиленные и отфильтрованные электрические сигналы преобразуются в пару последовательностей однополярных импульсов постоянной амплитуды, при этом в отсутствии подвижных объектов наземной техники на заданном интервале усреднения определяется число границ передних фронтов шумовых импульсов в соответствующих последовательностях, оцениваются величины текущих периодов следования импульсов, определяются средние значения периодов следования импульсов в последовательностях и соответствующие среднеквадратические отклонения, с использованием которых производится стандартная оценка величины шумовых порогов для каждой последовательности, а используемый далее шумовой порог находится как среднеарифметическое значение этих вычисленных двух порогов; при наличии полезного сейсмосигнала от подвижного объекта наземной техники операции, описанные выше, повторяются вплоть до оценки средних значений периодов следования импульсов в соответствующих импульсных последовательностях, а используемое далее для сравнения с шумовым порогом значение периода следования импульсов находится как среднеарифметическое значение этих вычисленных двух средних периодов; если найденный период следования импульсов больше шумового порога, то считают, что объект обнаружен, в противном случае цикл обнаружения, описанный выше, повторяют.
Предлагаемый способ включает следующие операции.
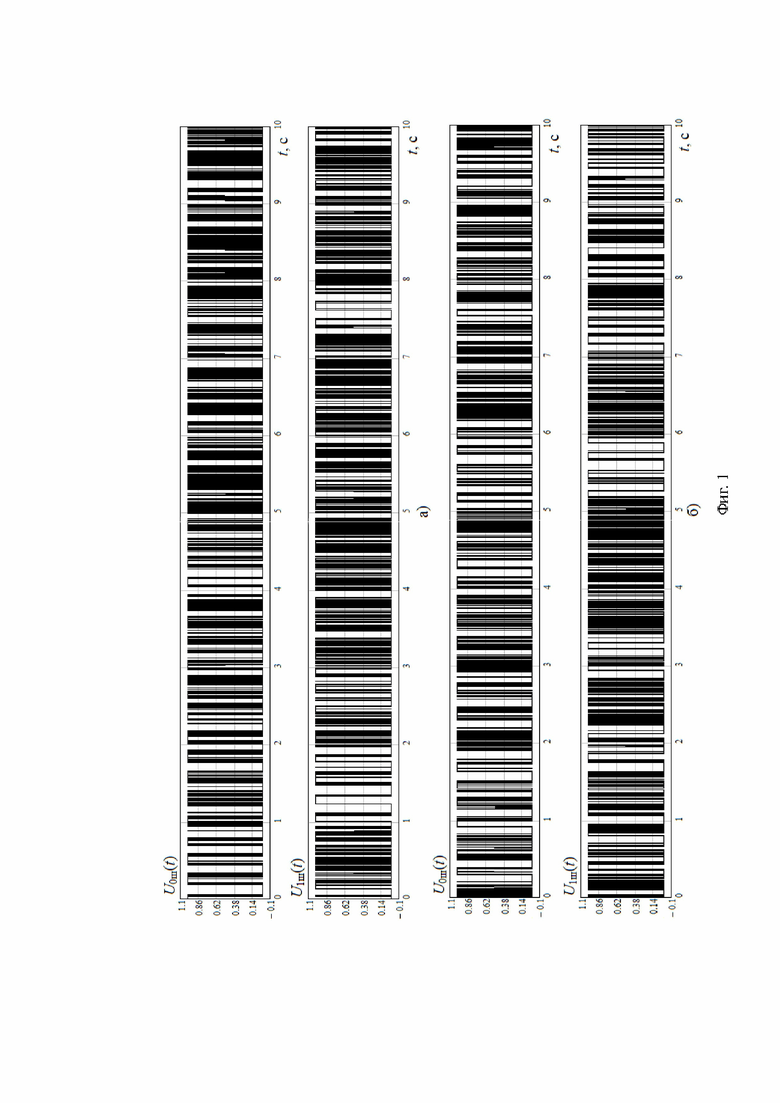
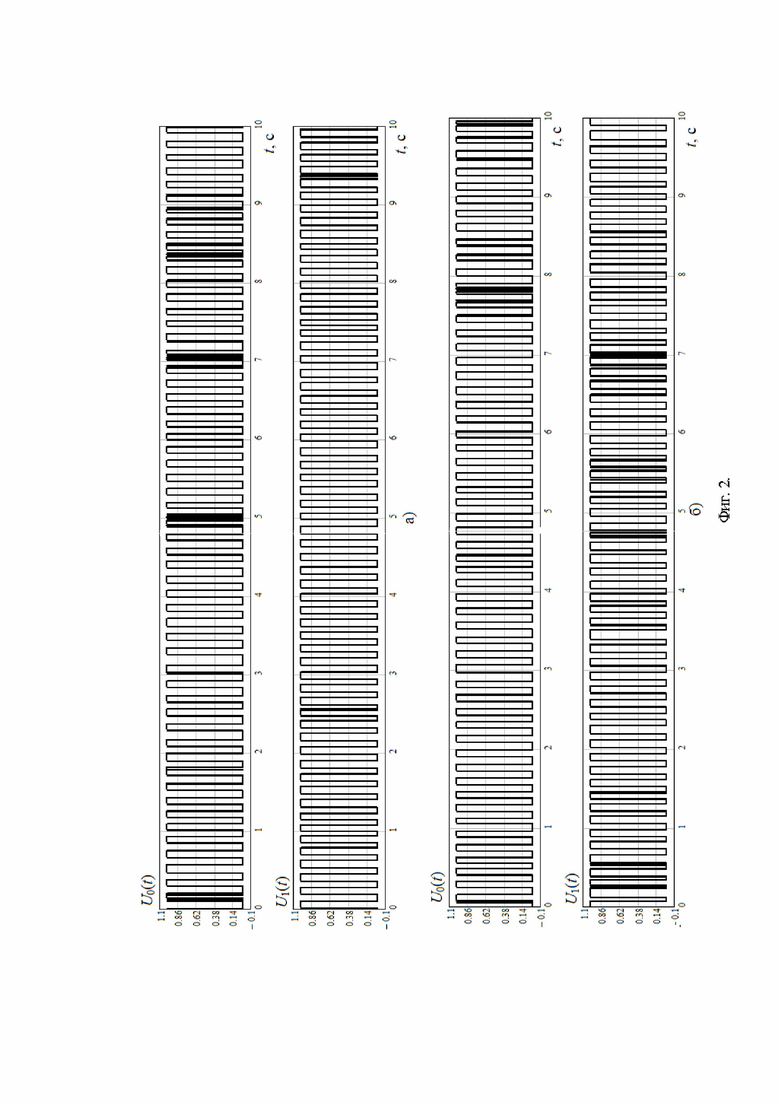
1. Пару упомянутых аналоговых сейсмосигналов подвергают фильтрации в полосе (8 - 20) Гц и преобразуют в две последовательности прямоугольных однополярных импульсов постоянной амплитуды. На фиг.1 в качестве примера приведены начальные отрезки двух пар таких последовательностей, которые характеризуют шумовой (помеховый) фон в месте расположения контрольно-испытательной трассы в разные часы суток. На фиг. 2 в качестве иллюстрации приведены начальные отрезки двух пар таких последовательностей, полученных при прохождении легкового автомобиля «Мицубиси L-200» по контрольно-испытательной трассе с разными скоростями и на разных траверзных расстояниях от молекулярно-электронного сейсмодатчика. На фиг. 2а) – для траверзного расстояния от трассы до датчика равном 20 м при скорости движения автомобиля 40 км/ч. На фиг. 2б) – для траверзного расстояния от трассы до датчика равном 40 м при скорости движения автомобиля 10 км/ч.
2. В начале каждого цикла обнаружения при отсутствии полезных сейсмосигналов в шумовых импульсных последовательностях U0,ш(t) и U1,ш(t) на интервале усреднения посредством подсчёта числа переходов типа U0,ш(t) = 0 - U0,ш(t) = const и U1,ш(t) = 0 – U1,ш(t) = const определяют количество границ передних фронтов импульсов N0,ш и N1,ш, номера текущих границ передних фронтов n0,ш = 0, 1,…, N0,ш-1, n1,ш = 0, 1,…, N1,ш-1 и соответствующие им позиции на временной оси 

3. На интервале усреднения находят величины текущих периодов следования импульсов в последовательностях 

4. Для уменьшения негативного влияния близких по длительности к нулевым значениям текущих периодов на интервале усреднения исключают те, величина которых примерно на порядок меньше максимального из всех их значений


5. На интервале усреднения определяют оставшееся количество ненулевых текущих периодов следования импульсов в каждой из последовательностей N0,нш и N1,нш и новые номера текущих границ передних фронтов n0,нш = 0, 1,…, N0,нш-1, n1,нш = 0, 1,…, N1,нш-1и получают 
6. Как и в прототипе оценивают величины шумовых порогов

- по данным, измеренным на каждом из упомянутых выше временных промежутков определяют средние периоды следования импульсов путём усреднения по количеству текущих периодов на заданном интервале усреднения
- на заданном интервале усреднения оценивают среднеквадратическое отклонение текущих периодов от их средних значений
- стандартным способом формируют шумовые пороги для каждой из последовательностей
- в качестве искомых шумовых порогов используют следующие величины
При наличии подвижного объекта наземной техники в зоне чувствительности молекулярно-электронного датчика пару сейсмосигналов с его выходов обрабатывают аналогично тому, как это было описано выше.
1. Подвергают фильтрации в полосе (8 - 20) Гц и преобразуют в две последовательности прямоугольных однополярных импульсов постоянной амплитуды U0(t) и U1(t), что представлено на фиг. 2.
2. На интервале усреднения посредством подсчёта числа переходов типа U0(t) = 0 - U0(t) = const и U1(t) = 0 – U1(t) = const в каждом из сейсмосигналов определяют количество границ передних фронтов импульсов N0 и N1, номера текущих границ передних фронтов n0 = 0, 1,…, N0-1, n1 = 0, 1,…, N1-1 и соответствующие им позиции на временной оси 

3. На интервале усреднения находят величины текущих периодов следования импульсов в последовательностях 
4. Для уменьшения отрицательного влияния шумового (помехового) фактора на интервале усреднения исключают те текущие периоды, величина которых примерно в три раза меньше максимального из всех их значений
5. На интервале усреднения определяют оставшееся количество ненулевых текущих периодов следования импульсов в каждой из последовательностей N0,н и N1,н и новые номера текущих границ передних фронтов n0,н = 0, 1,…, N0,н-1, n1,н = 0, 1,…, N1,н-1 и получают 

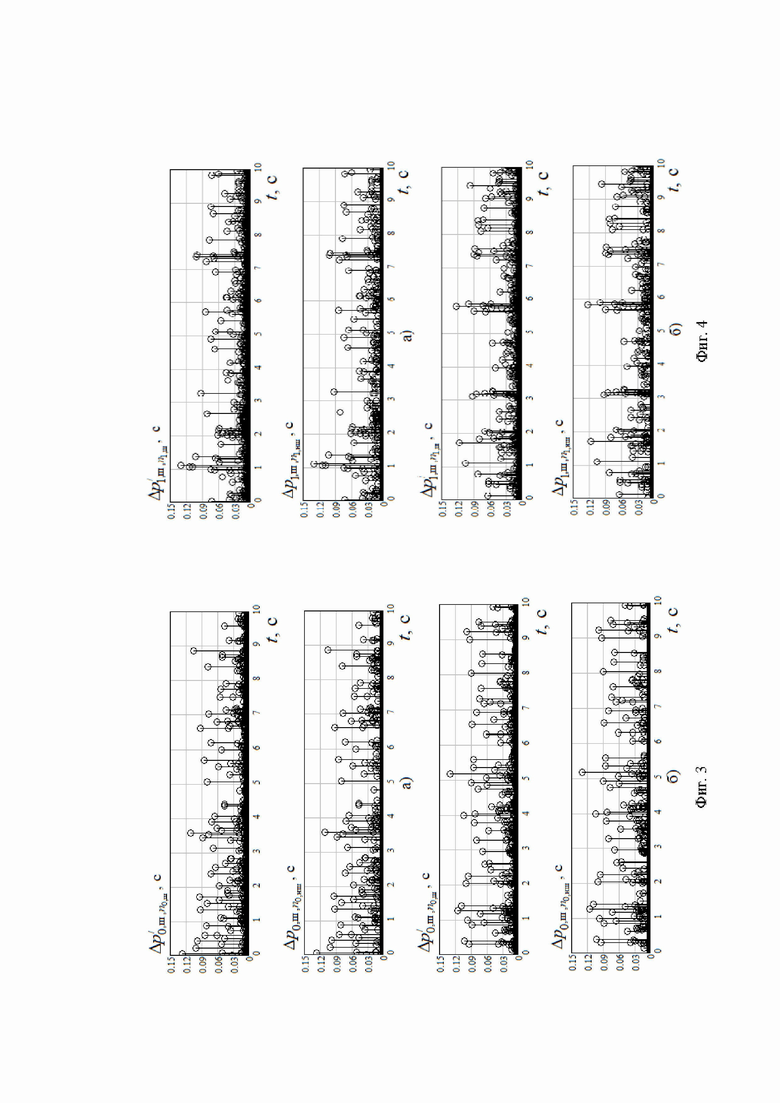
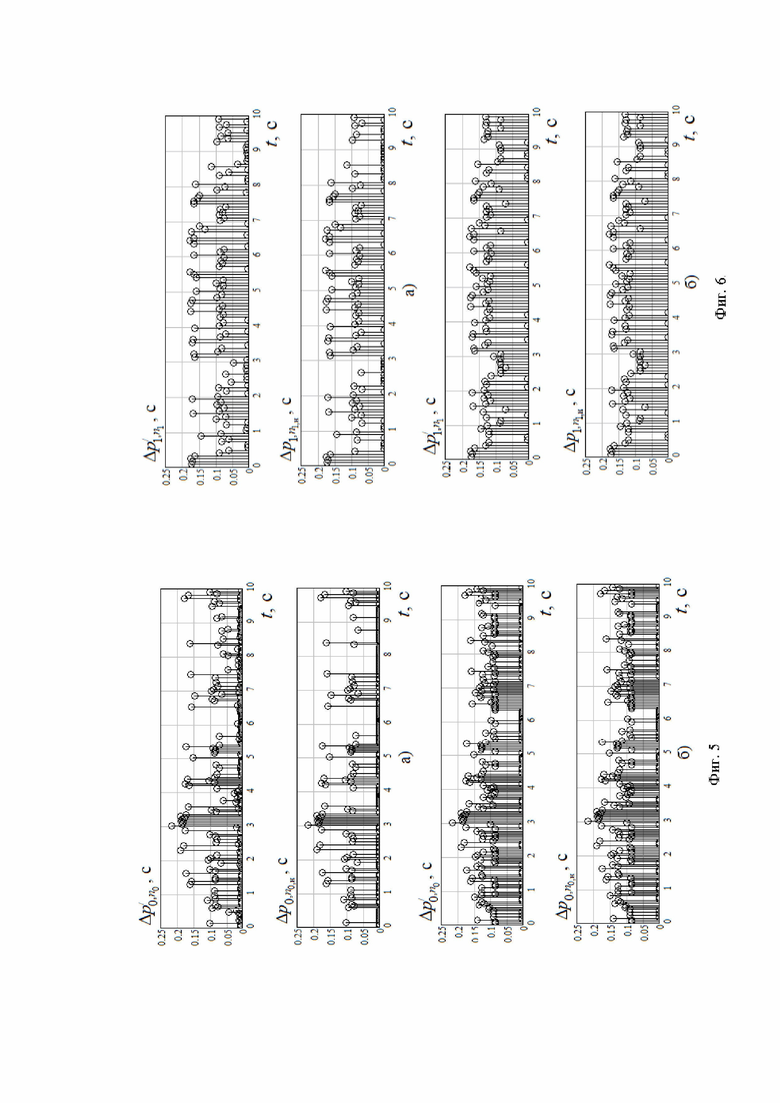
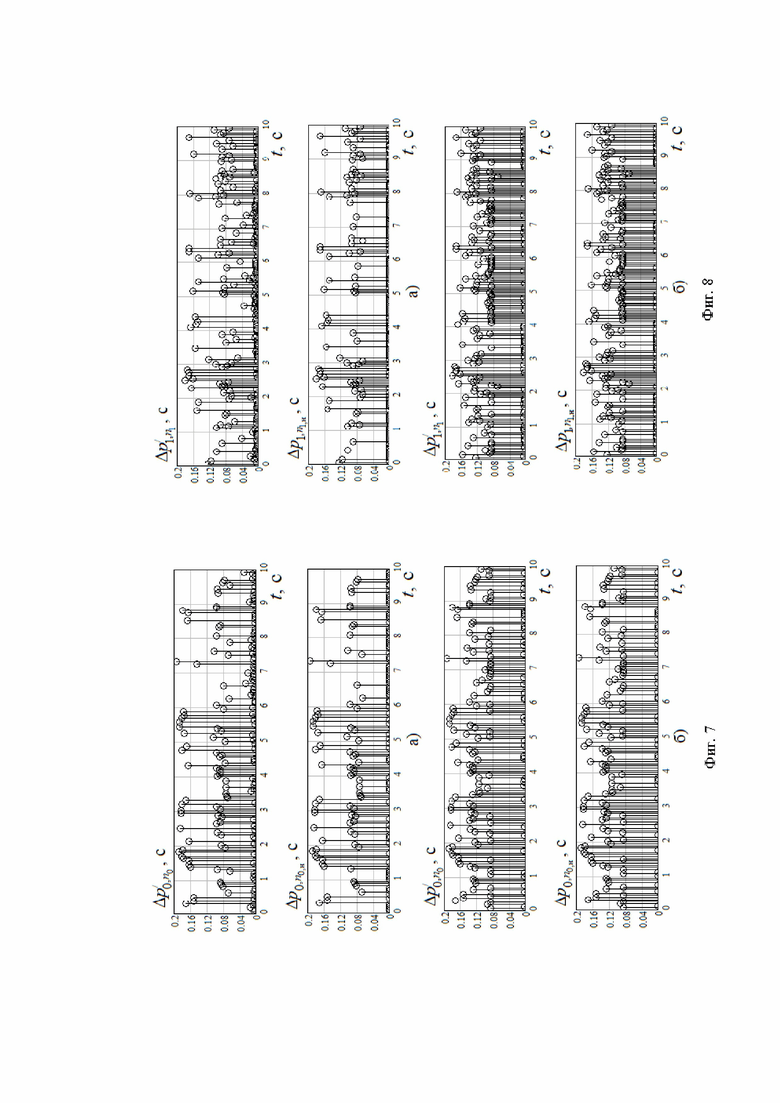
В качестве примера на фиг. 5 – фиг. 8 представлены текущие значения величин: на фиг. 5а) 

6. Оценивают средние периоды следования импульсов в последовательностях путём усреднения по количеству текущих периодов на заданном интервале усреднения
Везде для краткости у шумовых и сигнальных величин 



7. Определяют средние значения
8. Формируют соответствующие функции обнаружения путём сравнения полученных величин 



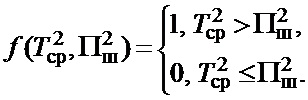
Если 
В частности, по данным, приведёнными на фиг. 3 – фиг. 8, в соответствии с описанными выше соотношениям и условиями проведения трассовых испытаний, для колёсного и гусеничного объектов получены следующие значения шумовых порогов и средних периодов следования импульсов в соответствующих последовательностях величины: 
Таким образом, технический результат предлагаемого способа – значительное снижение влияния на датчики естественных, искусственных и индустриальных помех, уменьшение количества ложных срабатываний, возможность детектирования движущихся объектов при низком соотношении сигнал/шум. снижение чувствительности к погодно-климатическим вариациям, кроме того, отпадает необходимость применения многокаскадных усилительно-фильтрующих трактов с системами автоматической регулировки усиления, снижаются требования к вычислительной мощности устройства, увеличивается время автономной работы.
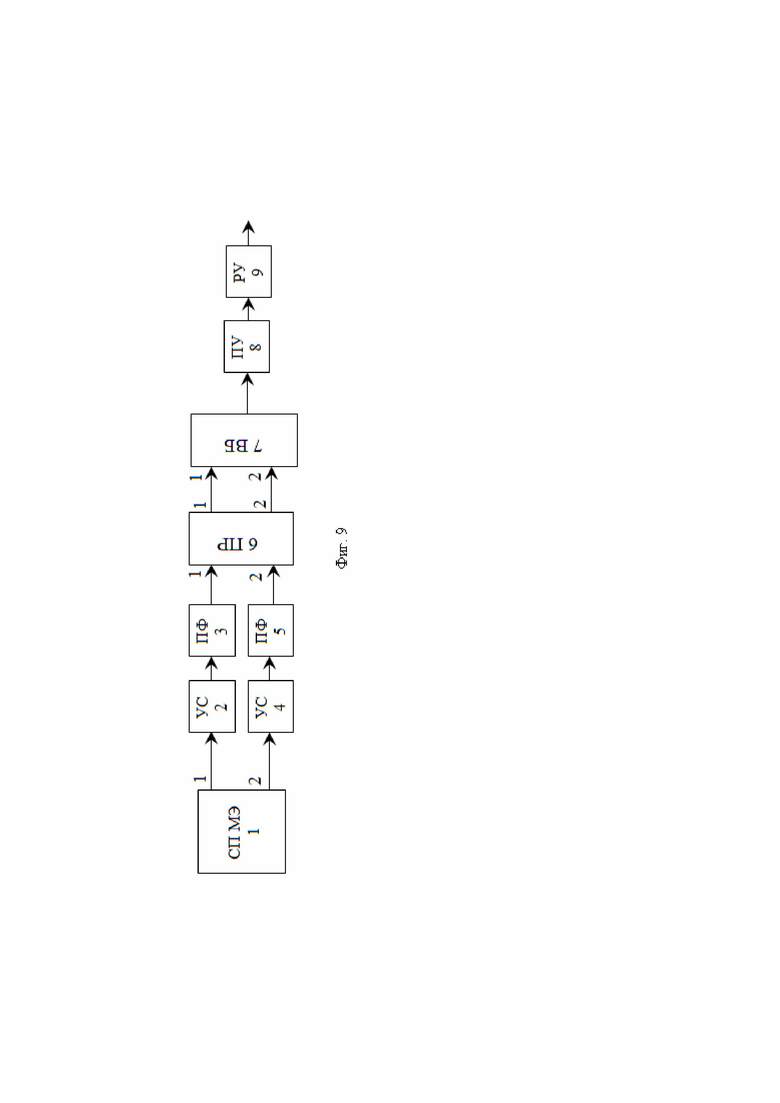
На фиг. 9 представлена укрупнённая блок схема устройства, реализующего предлагаемый способ, где введены следующие обозначения:
1 – молекулярно-электронный сейсмоприёмник (СП МЭ);
2, 4 – первый и второй усилители сигнала (УС);
3, 5 – первый и второй полосовые фильтры (ПФ);
6 – преобразователь сигналов в импульсную последовательность (ПР);
7 – вычислительный блок (ВБ);
8 – пороговое устройство (ПУ);
9 – решающее устройство (РУ).
Устройство содержит молекулярно-электронный сейсмоприёмник 1, первый выход которого через последовательно соединенные первый усилитель сигнала 2 и полосовой фильтр 3 подключен к первому входу преобразователя сигналов в импульсную последовательность 6. Второй выход СП МЭ 1 через последовательно соединенные второй УС 4 и второй ПФ 5 подключен ко второму входу ПР 6, первый и второй выходы которого соединены с первым и вторым входами вычислительного блока 7 соответственно. Выход ВБ 7 соединен с входом порогового устройства 8, выход которого соединен с входом решающего устройства 9, выход которого является выходом всего устройства.
Работает устройство следующим образом.
Электрические сигналы с двух выходов молекулярно-электронного сейсмоприёмника 1 поступают на соответствующие входы усилителей сигналов 2 и 4, где усиливаются до необходимой величины. С выходов этих усилителей сигналы поступают на соответствующие входы полосовых фильтров 3 и 5 с полосой пропускания каждого равной Δf = 12 Гц и граничными частотами fн = 8 Гц, fв = 20 Гц. Отфильтрованные сигналы с выходов полосовых фильтров 3 и 5 поступают на два соответствующих входа преобразователя сигналов 6, где подвергаются соответствующей обработке и с двух его выходов импульсные последовательности поступают на соответствующие входы вычислительного блока 7. В вычислительном блоке 7 в зависимости от наличия или отсутствия объекта наземной техники осуществляется обработка пары импульсных последовательностей в соответствии с соотношениями, описанными выше. Результат либо в виде в виде значений текущих шумовых порогов 

Реализация подобного устройства не должна вызывать затруднений, так как все блоки, кроме первого, являются стандартными и достаточно часто используемыми в патентах и инженерных разработках. Молекулярно-электронные сейсмоприёмники описаны, например, в [5 - 9]. Варианты их использования описаны в технической литературе, например, в [10 - 13].
Источники информации.
1. Патент РФ 2014619, G01P 15/12. Датчик ускорения. Колесникова Л.А., Полуянов В.А., Логинов П.М., Соболев М.Д. Заявка № 4955527/10 от 13.06.1991. Опубл. 15.06.1994 г.
2. Янчич В.В. Пьезоэлектрические акселерометры на основе монолитного блока с деформацией изгиба / В.В. Янчич // Зарубежная радиоэлектроника. – 1996. – № 9, стр. 63-64.
3. Патент РФ 2204850, G01V 1/16. Сейсмоприемник. Доля В.К., Круглов А.К. Заявка № 2002112574/28 от 13.05.2002. Опубл. 20.05.2003 г.
4. Патент РФ 2703481 G01V 1/16, G01V 1/18, G01V 1/20, H03B 9/12. Датчик для регистрации сейсмических колебаний. Заалишвили В.Б., Козырев Е.Н., Мельков Д.А., Аскеров Р.О. Заявка № 2019107234 от 13.03.2019. Опубл. 17.10.2019 г.
5. Авт. свид. СССР 987531, G01P 15/08. Молекулярно-электронный угловой акселерометр. Н.В. Петькин, Ю.Н. Осипов, В.А. Федорин. Заявка № 3332583/18 от 17.08.1981. Опубл. 07.01.1983.
6. Авт. свид. СССР 1458831, G01P 15/08, Н01G 9/12. Угловой акселерометр. Б.Н. Костенко, В.И. Вертяев. Заявка № 4266349/24 от 22.06.1987. Опубл. 15.02.1989.
7. Патент РФ 2404436, G01P 15/08. Молекулярно-электронный преобразователь углового ускорения. Агафонов В.М., Голицын В.Ю., Сафонов М.В., Чаплыгин А.А. Заявка № 2009138095/28 от 14.10.2009. Опубл. 20.11.2010 г.
8. Агафонов В.M. Принципы работы и технические характеристики малогабаритного молекулярно-электронного сейсмодатчика с отрицательной обратной связью / В.М. Агафонов, И.В. Егоров, А.С. Шабалина // Сейсмические приборы. – 2013. T. 49, № 1, с. 5-18.
9. Патент РФ 2723386, G01P 15/08. Способ изготовления электродного узла молекулярно-электронного датчика линейных и угловых перемещений. Елохин В.А., Николаев В.И., Макаров Д.А. Заявка № 2020102151 от 20.01.2020. Опубл. 11.06.2020 г.
10. Патент РФ 2457513 G01V 1/28. Способы и системы для обработки микросейсмических данных. ЛИНИ Скотт В. Заявка № 2010103987/28 от 04.07.2008. Опубл. 27.07.2012 г.
11. Патент РФ 142159, G08B 13/24. Многокомпонентный сейсморазведочный комплекс. Агафонов В.М. Заявка № 2013109431/28 от 05.03.2013. Опубл. 20.06.2014 г.
12. Патент РФ 78594, G08B 13/24, G08C 21/00, G01V 1/16. Охранный сейсмический комплекс быстрого развертывания на основе молекулярно-электронных датчиков движения. Агафонов В.М., Бугаев А.С. Заявка № 2008116120/22 от 25.04.2008. Опубл. 27.11.2008 г.
13. Агафонов В.М. Определение направления на движущийся объект с использованием сейсмического модуля, содержащего молекулярно-электронные датчики движения / В.М. Агафонов, К. А. Афанасьев, А. В. Яшкин // Теоретическая и прикладная механика. Труды МФТИ. – 2013. — Том 5, № 2, стр. 142-149.
14. Патент РФ 2165629, G01V 1/00. Устройство обработки сейсмических сигналов для систем охранной сигнализации. Крюков И.Н., Иванов В.А., Дюгованец А.П., Шуалов А.Г. Заявка от 05.01.2000. Опубл. 20.04.2001 г.
15. Патент РФ 2365945, G01V 1/00. Способ обнаружения перемещающихся объектов по сейсмическому сигналу. Дудкин В.А., Мясникова Н.В., Митрохин М.А., Фирсов М.С., Вольсков А.А. Заявка № 2008128036/28 от 09.07.2008. Опубл. 27.08.2009 г.
16. Патент РФ 2568142, G01V 1/00, G08B 13/00. Способ обнаружения перемещающихся объектов по сейсмическому сигналу. Вольсков А.А., Дудкин В.А., Катернюк С.С., Гостева Т.А. Заявка № 2014127084/28 от 02.07.2014. Опубл. 10.11.2015 г.
17. Патент РФ 2242799, G08B 13/16, G01V 1/22. Устройство обработки сейсмических сигналов для систем охранной сигнализации. Глазунов Б.П., Груздов В.А., Окулов С.А., Ольховская И.В., Фролов С.Б. Заявка №2003113974/09 от 12.05.2003. Опубл. 20.12.2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ С НОРМИРУЕМОЙ ВЕРОЯТНОСТЬЮ ЛОЖНЫХ СРАБАТЫВАНИЙ | 2014 |
|
RU2570230C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ПЕРЕДВИГАЮЩИХСЯ ПО ОХРАНЯЕМОЙ ТЕРРИТОРИИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2623842C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
Изобретение относится к области сейсмической разведки и может быть использовано в охранно- и разведывательно-сигнализационных комплексах и системах для обработки сейсмических сигналов, генерируемых объектами наземной техники в поверхностном слое почвы с целью их обнаружения. Особенностью данного способа является выделение информационных признаков движущихся объектов наземной техники из парной последовательности импульсных сигналов, получаемых с выходов датчика крутильных колебаний, без необходимости анализа их амплитудных характеристик. Достигаемый технический результат – значительное снижение влияния на датчики естественных, искусственных и индустриальных помех, уменьшение количества ложных срабатываний, возможность детектирования движущихся объектов при низком соотношении сигнал/шум. Снижение чувствительности к погодно-климатичесим вариациям. Отпадает необходимость применения многокаскадных усилительно-фильтрующих трактов с системами автоматической регулировки усиления, снижаются требования к вычислительной мощности устройства, увеличивается время автономной работы. Технический результат достигается за счёт выявления статистических закономерностей обработкой двух генерируемых одним и тем же источником последовательностей импульсных сигналов с ограниченной и постоянной амплитудой. 9 ил.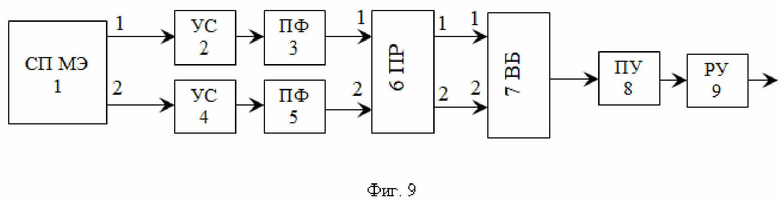
Способ обнаружения движущихся объектов наземной техники по сейсмическому сигналу, возбуждаемому подвижным объектом наземной техники в поверхностном слое почвы, включающий регистрацию этого сейсмосигнала, преобразование его в электрический сигнал, его усиление и фильтрацию в заданной полосе частот, отличающийся тем, что регистрацию сейсмосигналов осуществляют молекулярно-электронным сейсмоприемником, электрические сигналы с двух выходов которого поступают на соответствующие входы усилителей сигналов, где усиливаются до необходимой величины, с выходов этих усилителей сигналы поступают на соответствующие входы полосовых фильтров, усиленные и отфильтрованные электрические сигналы преобразуются в пару последовательностей однополярных импульсов постоянной амплитуды, при этом в отсутствии подвижных объектов наземной техники на заданном интервале усреднения определяется число границ передних фронтов шумовых импульсов в соответствующих последовательностях, оцениваются величины текущих периодов следования импульсов, определяются средние значения периодов следования импульсов в последовательностях и соответствующие среднеквадратические отклонения, с использованием которых производится стандартная оценка величины шумовых порогов для каждой последовательности, а используемый далее шумовой порог находится как среднеарифметическое значение этих вычисленных двух порогов; при наличии полезного сейсмосигнала от подвижного объекта наземной техники операции, описанные выше, повторяются вплоть до оценки средних значений периодов следования импульсов в соответствующих импульсных последовательностях, а используемое далее для сравнения с шумовым порогом значение периода следования импульсов находится как среднеарифметическое значение этих вычисленных двух средних 6 периодов; если найденный период следования импульсов больше шумового порога, то считают, что объект обнаружен, в противном случае цикл обнаружения, описанный выше, повторяют.
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| Аэродинамические весы | 1960 |
|
SU142159A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| US 4106003 A, 08.08.1978. | |||

