Изобретение относится к области сейсмической разведки и может быть использовано в разведывательно-сигнализационных и охранных комплексах и системах для целеуказания средствам поражения, управления подрывом инженерных боеприпасов, а также для мониторинга участков местности и контроля несанкционированного доступа к охраняемым объектам.
Известны различные способы классификации движущихся объектов наземной техники по результатам анализа различных типов сейсмических колебаний, возбуждаемых ими в поверхностном слое почвы в процессе движения. Преобразование подобных механических колебаний грунта в электрический сигнал, как правило, осуществляется в сейсмоприёмниках различных типов. Функционирование таких устройств основано на различных физических принципах. Например, электромагнитном, емкостном, тензорезистивном, пьезорезистивном, магнитоэлектрическом, волоконнооптическом, пьезоэлектрическом или комбинированном. Наибольшее распространение на практике получили электромагнитные и пьезоэлектрические сейсмоприемники [1-4] ввиду простоты конструкции и низкой стоимости. Однако, они не обладают достаточно низкими собственными шумами, чувствительны к внешним помехам и часто имеют недостаточно широкий диапазон рабочих частот. Поэтому в настоящее время всё большее распространение получают сейсмодатчики вращательных движений (крутильных колебаний) [5-9], изготавливаемые с использованием молекулярно-электронной технологии. Уникальной особенностью молекулярно-электронных сейсмопреобразователей является нечувствительность к чисто поступательным движениям. При этом они обладают высокой чувствительностью к вращательной составляющей сейсмического сигнала. Молекулярно-электронные сейсмодатчики имеют достаточно высокий коэффициент преобразования, однако принципиальным моментом здесь является достижение низкого уровня собственных шумов. Как правило, они включают две пары электродов, помещенных в замкнутый канал, заполненный электролитом. При этом пары электродов расположены инверсно относительно друг друга: катод-анод и анод-катод. Потенциал всех электродов поддерживается постоянным. Именно такая схема используется в практических молекулярно-электронных устройствах. Под действием сил инерции жидкость движется внутри канала. В свою очередь поток жидкости изменяет величину электродных токов. Вариации электродных токов представляют выходные аналоговые сигналы преобразующего элемента.
При этом надо иметь в виду, что способы обработки сейсмосигналов в любом из типов сейсмодатчиков могут быть как сходными, так и различными. Ведь они реализуют операции над колебательными процессами, формальное описание которых практически одинаково. Следовательно, формально допустимо использовать в качестве аналогов любые подходящие способы, независимо от того, какие типы сейсмоволн в них фигурируют.
Суть сейсмометрических способов заключается в регистрации механических колебаний грунта, возбуждаемых движущимися объектами, преобразовании этих колебаний в аналоговый электрический сигнал и в дальнейшей обработке этого сигнала во временной и/или частотной областях с целью выделения признаков полезного сигнала на фоне шумов и помех.
Так, в [10] и [11] представлены варианты использования сейсмодатчиков, созданных на принципах молекулярно-электронного переноса. При этом шумы измерений, как правило, многократно снижены (исключены составляющие, не представляющие интереса с точки зрения практики), а зарегистрированный сейсмосигнал может быть разделен на составляющие по типам волн, каждая из которых обрабатывается своим, наиболее эффективным для данного типа волн, способом. Однако здесь такие сейсмоприёмники используются только для разделения сейсмических волн по типам.
В [12] в состав сейсмического комплекса быстрого развертывания включены три молекулярно-электронных сейсмических датчика, обеспечивающих одновременную регистрацию всех трех компонент сейсмического сигнала в широком частотном диапазоне с высоким отношением сигнал/шум. Обработка сигналов с выхода молекулярно-электронных сейсмодатчиков используется для уменьшения вклада шумов, для обнаружения и идентификации нарушителя, а также определения направления на него. Алгоритм распознавания нарушителя прост. Он работает по принципу счётчика шагов, а именно – 3-5 шагов (импульсов) в интервале времени 4 секунды является признаком нарушителя. Направление на нарушителя определяется с использованием на каждом шаге (импульсе) фазы сейсмосигнала, соответствующего Рэлеевской волне, а также соотношения амплитуд горизонтальных компонент поперечной поверхностной волны. Расстояние до нарушителя определяется с использованием отношения среднеквадратичных скоростей колебаний поверхности грунта в вертикальном направлении в высокочастотной и низкочастотной областях спектра. При этом для обработки использовались, только участки спектра с высоким уровнем сигнала, создаваемого нарушителем (то есть участки записи, детектированные как «шаг» с помощью упомянутого выше алгоритма «счетчика шагов»).
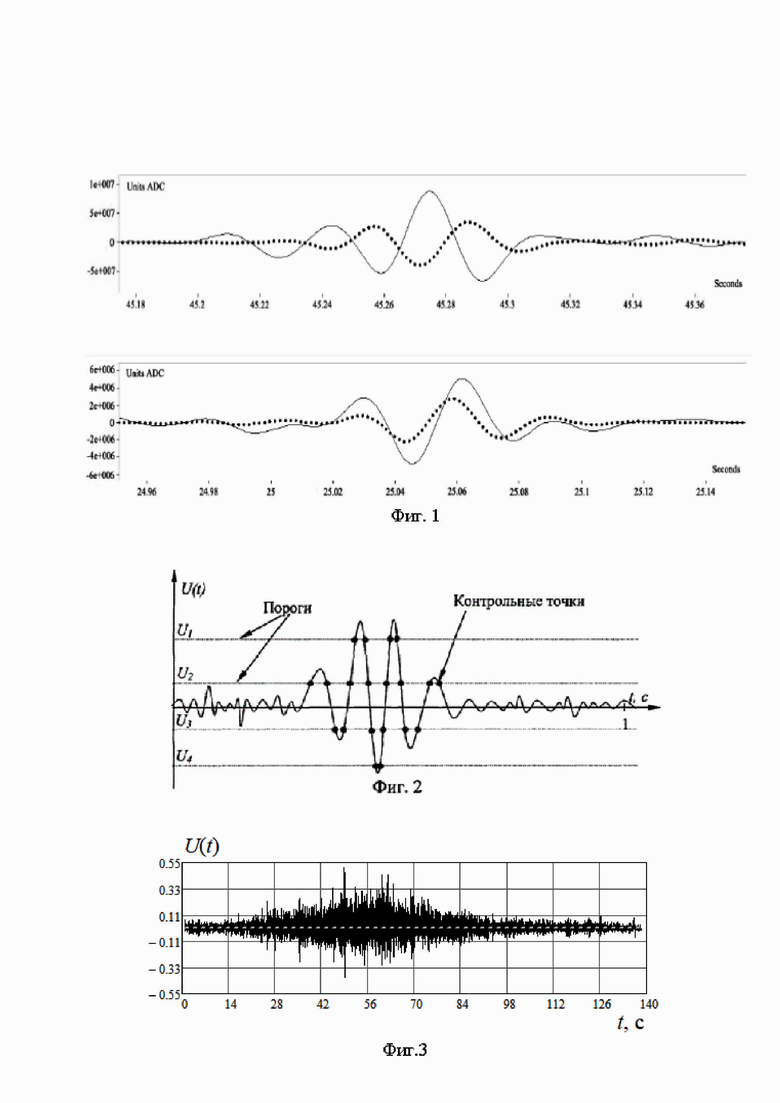
В статье [13] описан способ определения направления на движущегося нарушителя с использованием сигналов с трёх выходов сейсмического модуля, содержащего три молекулярно-электронных датчика с взаимно ортогональными осями чувствительности. На фиг. 1 приведены результаты натурного эксперимента, где иллюстрируется способности молекулярно-электронных датчиков регистрировать изменение разности фаз сигналов крутильного и вертикального датчиков в двух диаметрально противоположных точках траектории. Эта особенность и положена в основу способа определения положения нарушителя.
При этом как в [10-12], так и в [13], где обрабатываются сигналы, поступающие с выходов молекулярно-электронных датчиков непосредственно, способы классификации объектов наземной техники не используются.
В то же время способы классификации объектов наземной техники с использованием сейсмосигналов с выходов электромагнитных и/или пьезоэлектрических сейсмоприемников представлены в описаниях многих патентов. Например, в [14] для этого используется модель авторегрессии с учётом того, что случайные процессы могут описываться как авторегрессия некоторого порядка, характеризующая степень влияния предыдущих отсчетов сигнала на текущий отсчёт. По принятой реализации сейсмосигнала оцениваются коэффициенты регрессии и сравниваются с хранящимися в банке данных усредненных моделей, что позволяет вычислить условную вероятность принадлежности объекта к некоторому классу по результатам анализа принятого сейсмосигнала. Решение о классе объекта принимается по критерию максимума условной вероятности.
К недостаткам этого способа можно отнести следующие:
- необходимость хранения в банке данных усреднённых моделей коэффициентов регрессии и сведений о законах их распределения;
- количество каналов классификации должно быть равно количеству классов объектов;
- громоздкость вычислительного алгоритма;
- коэффициенты регрессии относятся к параметрам, зависящим от типа и состояния грунта, времени года, помеховой обстановки и других факторов, поэтому при изменении свойств грунта в спектрах сейсмических сигналов будет наблюдаться смещение частотных компонент в область высоких или низких частот, то есть достоверное распознавание объектов по результатам анализа таких сигналов возможно при использовании результатов анализа динамики поведения сейсмосигнала на некотором заданном интервале времени.
В [15] оценивается степень близости сейсмосигналов, источниками которых являются подлежащие распознаванию классы подвижных объектов, к эталонным сейсмосигналам. После обнаружения объекта принятый сейсмосигнал нормируется по амплитуде и дискретизируется с учётом теоремы Котельникова. Далее он подвергается преобразованию Фурье, направленному на выделение классификационных признаков, которыми являются значения усредненных частотных составляющих в характерных для определения классов объектов в частотных диапазонах.
Частотные признаки требуются для вычисления меры близости к эталонам сейсмосигналов, источниками которых являются подлежащие распознаванию классы объектов, которые хранятся в банке данных. Там же хранятся и значения сумм базисных функций, необходимых для вычисления значений частотных признаков в реальном масштабе времени.
После вычисления меры близости происходит выбор класса объекта: по критерию минимума значения меры выбираются два класса с сохранением информации о степени близости. Далее на основе анализа только частотных признаков сейсмического сигнала с использованием информации о частоте появления пар классов с учетом степени близости к эталону принимается решение о распознавании класса объекта. Для этого используется информация, представляющая собой статистические данные о частоте появления таких пар в виде матрицы, также хранящейся в банке данных.
Основными недостатками способа являются:
- необходимость хранения в банке данных значения сумм базисных функций и матриц, содержащих статистические данные о частоте появления классов с учетом степени близости к эталону;
- при увеличении числа классов объектов распознавания для увеличения вероятности правильной классификации, необходимо увеличивать количество признаков, характерных для выбранных классов;
- громоздкость вычислительного алгоритма.
Наиболее близким аналогом по технической сущности к предлагаемому является способ, описанный в [16], принятый за прототип.
Сущность способа-прототипа основана на анализе динамики изменения сейсмосигнала во времени. Наличие закономерностей в поведении сейсмосигнала (времени нарастания и спада фронтов, времени пребывания сейсмосигнала в экстремумах и т.п.). Это позволило сделать заключение о том, что сейсмический сигнал будет в определенной последовательности проходить некоторые заданные условные пороги. Причем для разных источников (подвижных объектов различных классов) последовательность прохождения будет существенно различаться.
При ограниченном объеме информации о поведении сигналов от каждого источника строится усредненный образ сейсмосигнала (эталон) по результатам анализа нескольких десятков реализаций сейсмосигналов, возбуждаемых в поверхностном слое почвы при движении этого класса наземной техники. Все остальные сейсмосигналы, которые в результате анализа не будут подходить под заданное правило с заданным значением точности, считаются нераспознанными или помехами. Сформированный усредненный образ сигнала в процессе работы хранится в банке данных в виде набора значений пороговых напряжений и значений временных интервалов прохождения этих порогов  . Число тех и других выбирается исходя из требований точности классификации объектов при анализе сейсмосигналов: чем больше число заданных порогов, тем точнее отслеживаются признаки объекта при анализе сейсмосигнала.
. Число тех и других выбирается исходя из требований точности классификации объектов при анализе сейсмосигналов: чем больше число заданных порогов, тем точнее отслеживаются признаки объекта при анализе сейсмосигнала.
На фиг. 2 представлено эталонное сейсмическое колебание объекта некоторого класса, усредненное по 100 реализациям, с контрольными точками на выбранных порогах, характеризующих пересечение этих порогов эталонным колебанием снизу вверх и сверху вниз. В общем случае хранить эталонные величины можно в виде векторов и матриц
 ,
,  .
.
Здесь k =1, 2,…, K – число заданных порогов; n1, n2,…, nK – количество контрольных точек на каждом из K заданных порогов.
Чтобы сформировать усредненный по этим записям образ сейсмосигнала необходимо оценить наличие импульсных сигналов, характерных для данного объекта, выделить их в ближайшей окрестности точки траверза и усреднить. Суть этого процесса поясняется ниже с включением соответствующих графических иллюстраций.
На фиг. 3 представлена одна из десяти записей вертикальной компоненты сейсмосигнала, зарегистрированного при прохождении танка Т-72 по контрольно-испытательной трассе со скоростью 25 км/ч слева-направо при траверзном расстоянии от сейсмодатчика, равном 100 метрам.
Фиг. 4 иллюстрирует оценку наличия и возможность качественного выделения импульсного сигнала, характеризующего прохождение данного подвижного наземного объекта, на разных удалениях от точки траверза. Здесь прямоугольник, изображённый жирным штрихом, выделяет на секундном интервале отрезок, на котором и присутствует самая характерная часть импульсного сигнала.
На фиг. 5а показано выделение импульсного сигнала вблизи окрестности точки траверза, а на фиг. 5б – импульсный сигнал, усреднённый по десяти выделенным вблизи точки траверза текущим импульсным сигналам, подобным изображённому на фиг. 5а.
Из анализа фиг. 4 и фиг. 5 следует, что с использованием усреднённого импульсного сигнала в качестве маски возможно достаточно надёжное выделение текущих импульсных сигналов, что является важнейшим моментом. Дальнейшие операции носят чисто технический характер, что не умаляет существенной новизны способа-прототипа.
Таким образом, после регистрации сейсмосигнал подвергается предварительной фильтрации, усиливается и производится его дискретизация в соответствии с теоремой Котельникова. При этом дискретное время выражается соответственно: ti = i·Δt, Δt = 1/fd, где fd – частота дискретизации. Затем дискретизированный сейсмосигнал анализируется соответствующим алгоритмом. При этом осуществляются следующие операции.
1. В заданной полосе частот реализуется выделение характерных импульсных сигналов, когда контролируются временные критерии воздействия сигнала (период, длительность, паузы между импульсами), которые должны отличаться от эталонных в пределах заданных ошибок.
2. Контролируется превышение выделенными импульсными сигналами заданных порогов, определяющее необходимое значение амплитуды сейсмосигнала (обнаружение – все K порогов должны быть превышены заданное количество раз).
3. Определяются моменты выхода отсчётов импульсных сигналов  за заданные пороги и моменты ухода его под них
за заданные пороги и моменты ухода его под них  .
.
4. При совпадении последовательности временных интервалов прохождения порогов с эталонными интервалами, хранящимися в банке данных, формируется логический сигнал о распознавании заданного класса объекта.
К основным недостаткам прототипа можно отнести следующее:
- возможность реализации обнаружения по сейсмическим сигналам, принятым при высоких уровнях сейсмофона, что при удалении источника сейсмических колебаний может снизить значения полезных сейсмосигналов до уровня выбросов сейсмофона и после обнаружения привести к ложной классификации;
- необходимость хранения различных наборов эталонных значений пороговых напряжений и значений временных интервалов прохождения этих порогов для сравнения с временной структурой импульсных сигналов, выделяемых из поступающих сейсмосигналов от объектов различных классов;
- громоздкость реализации способа.
Следовательно, в рабочей полосе частот на протяжении всей обработки сейсмосигнала необходимо минимизировать влияние увеличения траверзного расстояния на возможный рост вероятности ложной классификации обнаруженных объектов, минимизировать влияние погодно-климатического фактора, снизить потребность в хранении данных, необходимых для реализации способа и сложность необходимых вычислений.
Рассмотрим пару сейсмических колебаний, снимаемых с двух описанных выше пар электродов молекулярно-электронного датчика. Их источником является один и тот же подвижный объект наземной техники. Поэтому они должны быть каким-то образом взаимосвязаны. И самое простое, что можно использовать – это оценить степень их взаимной корреляции. Очевидно, что в отсутствии источника, величины текущих значений взаимокорреляционной функции (ВКФ) такой пары сигналов (или коэффициента взаимной корреляции – КВК, который является ВКФ, нормированной на единицу, и будет использоваться в дальнейшем), формируемые в текущем временном окне анализа, не должны превышать стандартный порог обнаружения  . При наличии такого источника степень среднестатистического «сходства» пары сейсмосигналов увеличится, что должно привести к увеличению вероятности превышения текущими значениями КВК порога П.
. При наличии такого источника степень среднестатистического «сходства» пары сейсмосигналов увеличится, что должно привести к увеличению вероятности превышения текущими значениями КВК порога П.
Оба упомянутых выше сейсмосигнала являются преобразованием смеси полезных сигналов с внутренним шумом сейсмоприёмника и внешним сейсмофоном, поэтому, согласно [17], всегда возможна ситуация, когда один из сигналов на некоторых временных отрезках будет опережать другой и, наоборот, на других временных отрезках отставать от него. Поэтому КВК этой пары сигналов служит не только мерой их среднестатистического сходства, но и мерой «устойчивости» их истинного состояния. Кроме того, надо заметить, что в отличие от автокорреляционной функции КВК не обязан достигать абсолютного максимума в моменты, когда между обрабатываемой парой сигналов возникает нулевой сдвиг. Далее, очевидно, что воздействие различных внешних факторов может привести к тому, что появятся достаточно длительные временные промежутки, когда величина сдвига между сигналами изменится в таких пределах, что степень «устойчивости» их истинного состояния значительно уменьшится, а это может привести к снижению величины КВК.
Таким образом, для устранения указанных недостатков способа-прототипа предлагается так же, как и в нём использовать анализ изменения во времени двух сейсмических колебаний, снимаемых с двух описанных выше пар электродов молекулярно-электронного датчика.
Задача предлагаемого способа – повышение вероятности правильной классификации подвижного объекта наземной техники
Для решения поставленной задачи в способе классификации подвижных объектов наземной техники по сейсмическому сигналу, возбуждаемому подвижным объектом наземной техники в поверхностном слое почвы, включающем регистрацию этого сейсмосигнала, преобразование его в два электрических сигнала, их усиление и фильтрацию в заданной полосе частот, согласно изобретению, усиленные и отфильтрованные электрические сигналы преобразуют в пару последовательностей однополярных импульсов постоянной амплитуды и дискретизируют в соответствии с теоремой Котельникова; на заданном интервале усреднения, определяют число границ передних фронтов импульсов в соответствующих последовательностях, оценивают величины текущих периодов следования импульсов, определяют средние значения периодов следования импульсов в последовательностях, определяют длительность скользящего временного окна как среднее значение этих средних периодов, находят количество отсчётов, укладывающихся на длительности временного окна, с использование полученных результатов вычисляют текущие средние значения коэффициента взаимной корреляции импульсных последовательностей до момента времени, соответствующего точке траверза включительно; отбирают те отсчёты текущих средних значений коэффициента взаимной корреляции, которые превысили стандартный порог; определяют количество таких отсчётов, находят усреднённый коэффициент взаимной корреляции как их среднеарифметическое значение; на основе данных, полученных аналогичной обработкой некоторого количества прогонов объектов наземной техники заданных классов по одной и той же контрольно-испытательной трассе в одинаковых условиях оценивают стандартную величину порога классификации таких объектов – верхнего порога для колёсной техники; если вычисленный усреднённый коэффициент взаимной корреляции лежит между стандартным порогом и порогом классификации, то объект относят к классу «колёсный»; если же он лежит выше порога классификации, то объект относят к классу «гусеничный».
Предлагаемой способ включает следующие операции:
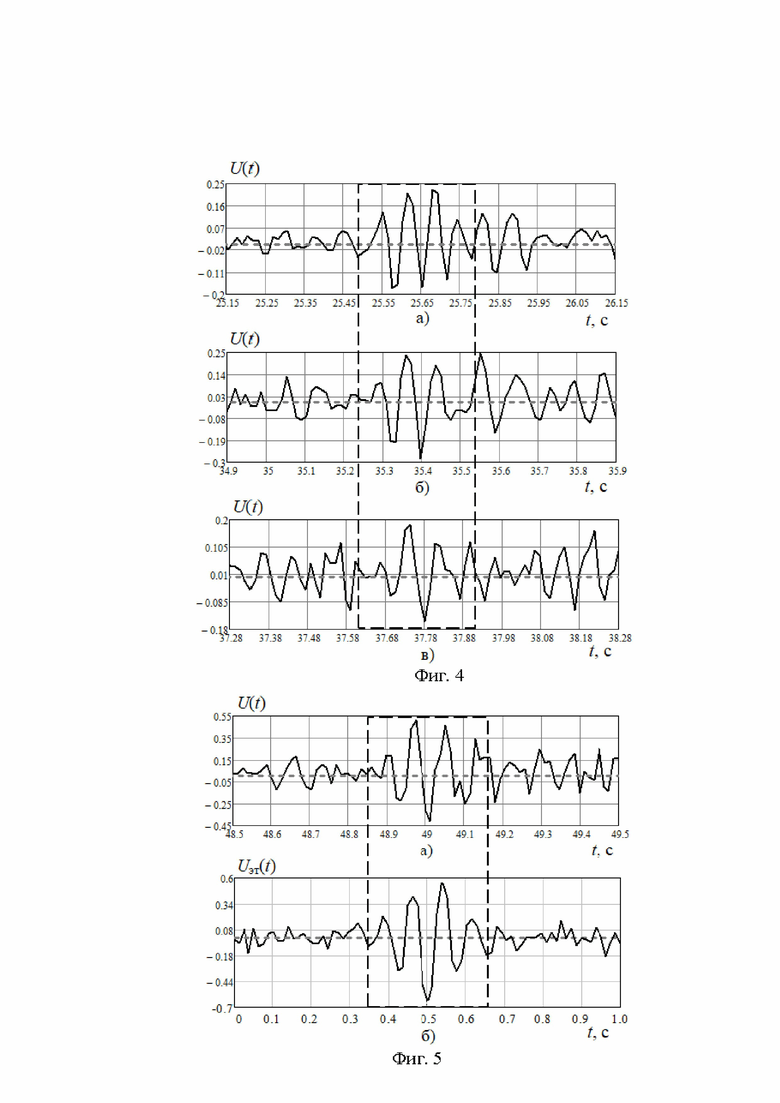
1. Пару сейсмосигналов преобразуют в две последовательности однополярных импульсов равной амплитуды X(t) и Y(t). В качестве иллюстрации на фиг. 6 представлены начальные отрезки двух пар импульсных последовательностей, полученные при прогоне легкового автомобиля (Мицубиси L200) и гусеничного объекта (БМП-3) на траверзном расстоянии от трассы до датчика равном 20 м при скорости движения объектов около 40 км/ч: на фиг. 6а) для автомобиля, на фиг. 6б) для БМП-3. На фиг. 7 представлены аналогичные отрезки двух пар импульсных последовательностей, но полученные при прогоне легкового автомобиля и гусеничного объекта на траверзном расстоянии от трассы до датчика равном 40 м при скорости движения объектов около 10 км/ч: на фиг. 7а) для автомобиля, на фиг. 7б) для БМП-3.
2. Сейсмосигналы дискретизируют в соответствии с теоремой Котельникова. Как и выше, частота дискретизации равна fd, длительность скользящего временного окна Td. Тогда Xk,nn и Yk,nn есть последовательность групп текущих отсчётов преобразованных и дискретизированных сейсмосигналов с соответствующих выходов молекулярно-электронного сейсмодатчика. Здесь k = 0, 1, 2,…, - номера текущих позиций временного окна; nn = 0, 1, …, Nd-1 – номера отсчётов в текущих временных окнах, а количество отсчётов в каждом текущем временном окне будет равно
 , (1)
, (1)
где  - временной дискрет. Индекс «k» задаёт сдвиг временного окна, что обеспечивает принятие решений каждые Td секунд, а индекс «nn» отвечает за усреднение случайных величин, в частности Xk,nn и Yk,nn.
- временной дискрет. Индекс «k» задаёт сдвиг временного окна, что обеспечивает принятие решений каждые Td секунд, а индекс «nn» отвечает за усреднение случайных величин, в частности Xk,nn и Yk,nn.
Величина скользящего временного окна Td определяется следующим образом. На заданной величине интервала усреднения в качестве опорной принимают сначала одну из импульсных последовательностей, затем другую. Затем на интервале усреднения осуществляют следующие операции:
3. Посредством подсчёта числа переходов типа Xk,nn = 0 - Xk,nn = const и Xk,nn = 0 – Xk,nn = const, Yk,nn = 0 - Yk,nn = const и Yk,nn = 0 – Yk,nn = const в каждой из импульсных последовательностей, принятых за опорные, определяют количество границ передних фронтов импульсов Nx и Ny, номера текущих границ передних фронтов nx = 0, 1,…, Nx-1, ny = 0, 1,…, Ny-1 и соответствующие им позиции на временной оси  ,
,  .
.
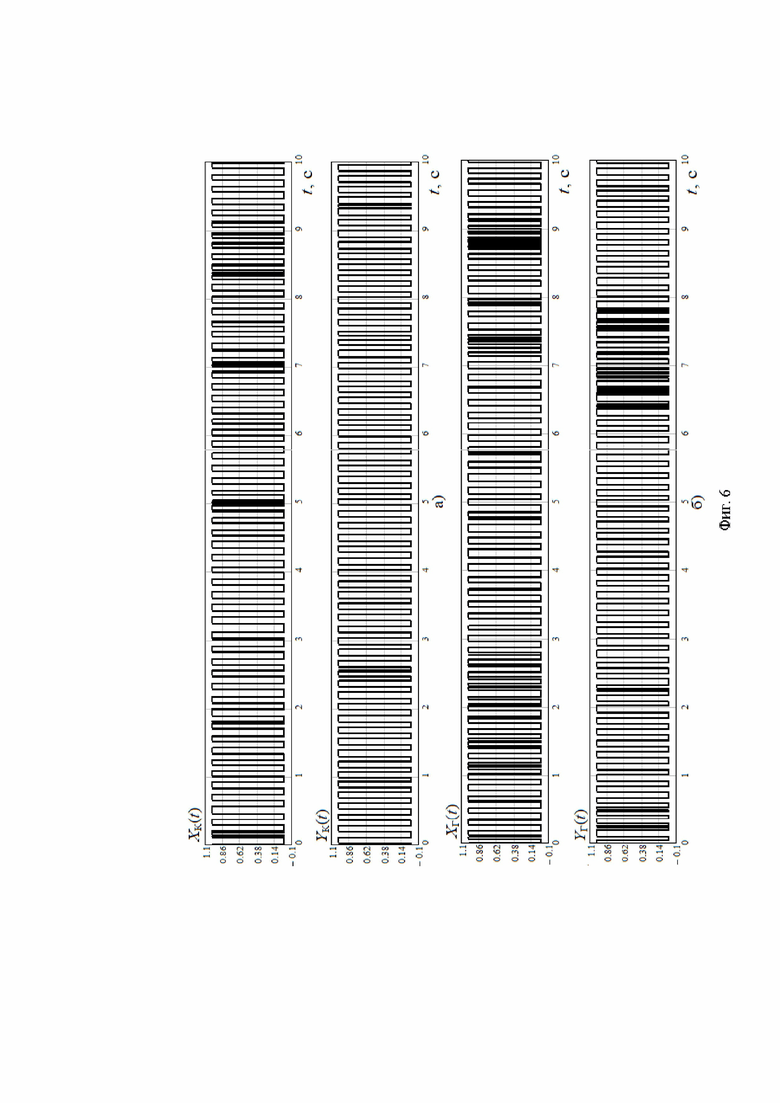
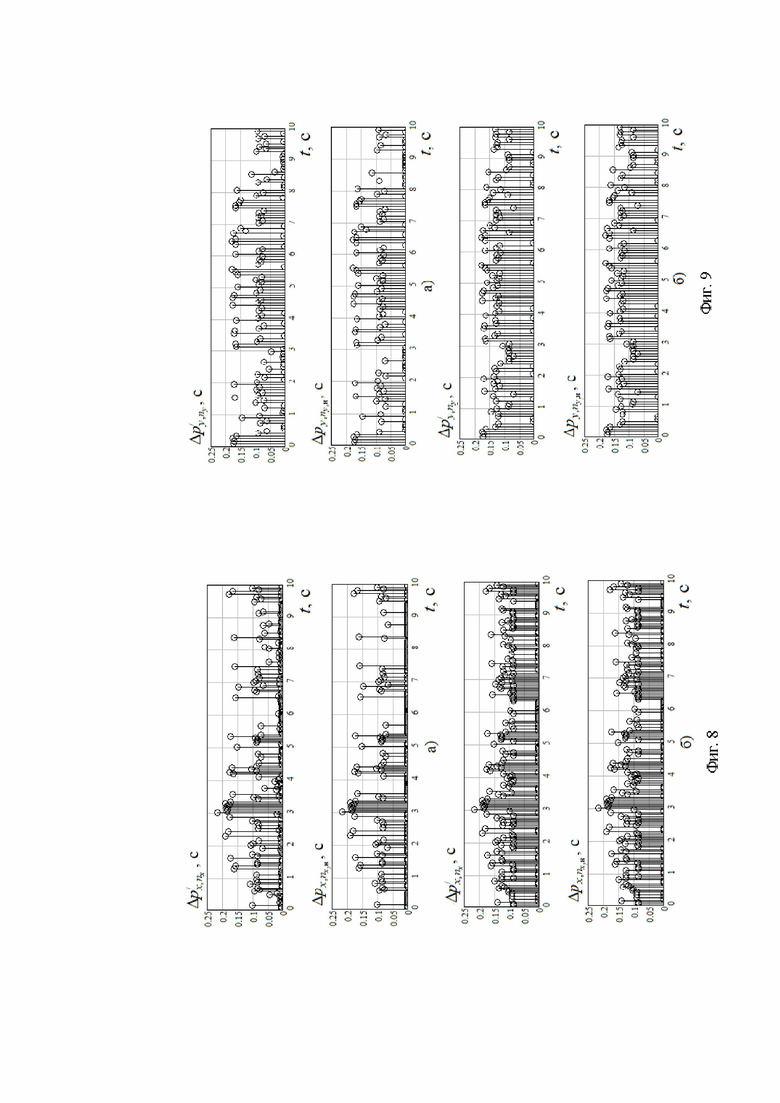
4. Находят величины текущих периодов следования импульсов в последовательностях  и
и  .
.
5. Для уменьшения отрицательного влияния шумового (помехового) фактора не исключают те текущие периоды, величина которых примерно в три раза меньше максимального из всех их значений

6. Определяют оставшееся количество ненулевых текущих периодов следования импульсов в каждой из последовательностей Nx,н и Ny,н и новые номера текущих границ передних фронтов nx,н = 0, 1,…, Nx,н-1, ny,н = 0, 1,…, Ny,н-1и получают  ,
, .
.
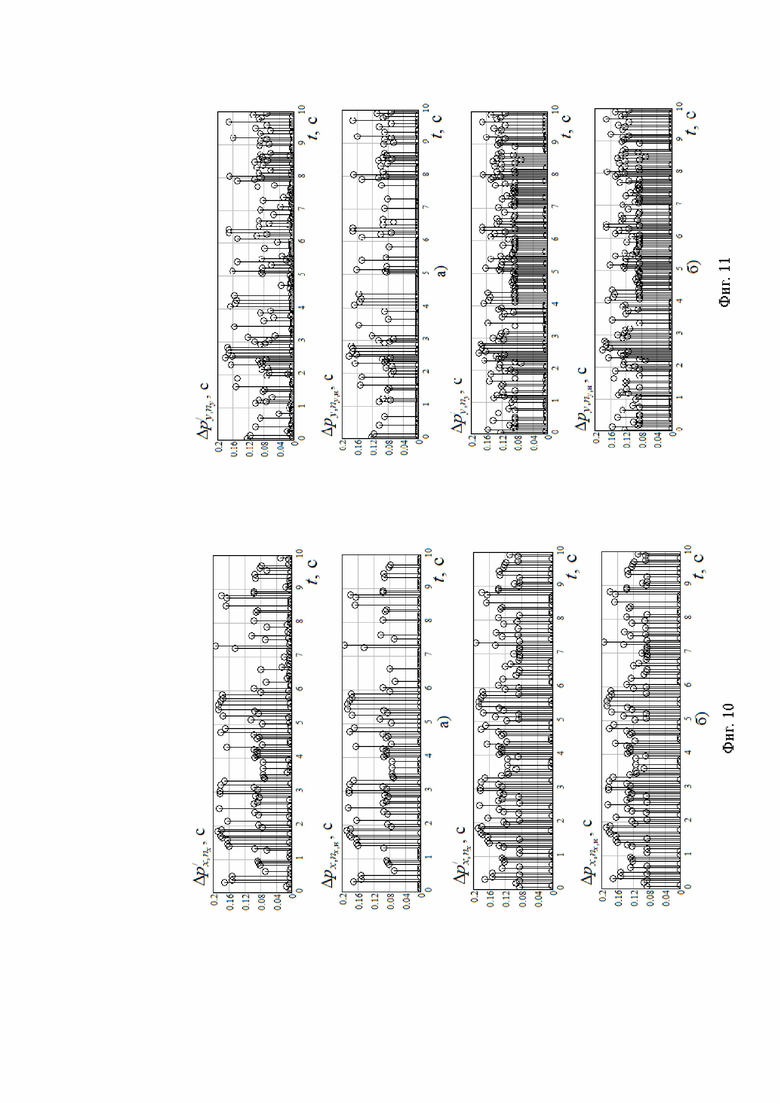
В качестве примера на фиг. 8 – фиг. 11 представлены текущие значения величин.
На фиг. 8а)  и
и  для первого сигнала датчика при прогоне легкового автомобиля на траверзном расстоянии от трассы до датчика равном 20 м при скорости движения автомобиля 40 км/ч.
для первого сигнала датчика при прогоне легкового автомобиля на траверзном расстоянии от трассы до датчика равном 20 м при скорости движения автомобиля 40 км/ч.
На фиг. 9а) – аналогичные величины для того же колёсного объекта, но для второго сигнала датчика.
На фиг. 8б)  и
и  для первого сигнала датчика при прогоне гусеничного объекта (БМП-3) для тех же условий движения.
для первого сигнала датчика при прогоне гусеничного объекта (БМП-3) для тех же условий движения.
На фиг. 9б) – аналогичные величины для того же гусеничного объекта, но для второго сигнала датчика.
На фиг. 10а) и для первого сигнала датчика при прогоне легкового автомобиля на траверзном расстоянии от трассы до датчика равном 40 м при скорости движения автомобиля 10 км/ч.
На фиг. 11а) – аналогичные величины для того же колёсного объекта, но для второго сигнала датчика.
На фиг. 10б) и для первого сигнала датчика при прогоне гусеничного объекта (БМП-3) для тех же условий движения.
На фиг. 11б) – аналогичные величины для того же гусеничного объекта, но для второго сигнала датчика.
7. Оценивают средние периоды следования импульсов в последовательностях путём усреднения по количеству текущих периодов на заданном интервале усреднения

8. Определяют величину скользящего временного окна Td как среднее значение
 .
.
9. На промежутке времени наблюдения находят количество отсчётов (1) в каждом текущем временном окне и оценивают текущие средние значения КВК аналогично тому, как это проделано в [18], но в других целях:
 (2)
(2)
где 
 – усреднённые на Nd отсчётах каждого k-го временного окна случайные величины Xk,nn и Yk,nn; индекс «n» отвечает как за усреднение случайных величин Xk,nn и Yk,nn, так и за усреднение нормированных КВКx для
– усреднённые на Nd отсчётах каждого k-го временного окна случайные величины Xk,nn и Yk,nn; индекс «n» отвечает как за усреднение случайных величин Xk,nn и Yk,nn, так и за усреднение нормированных КВКx для  и КВКy для
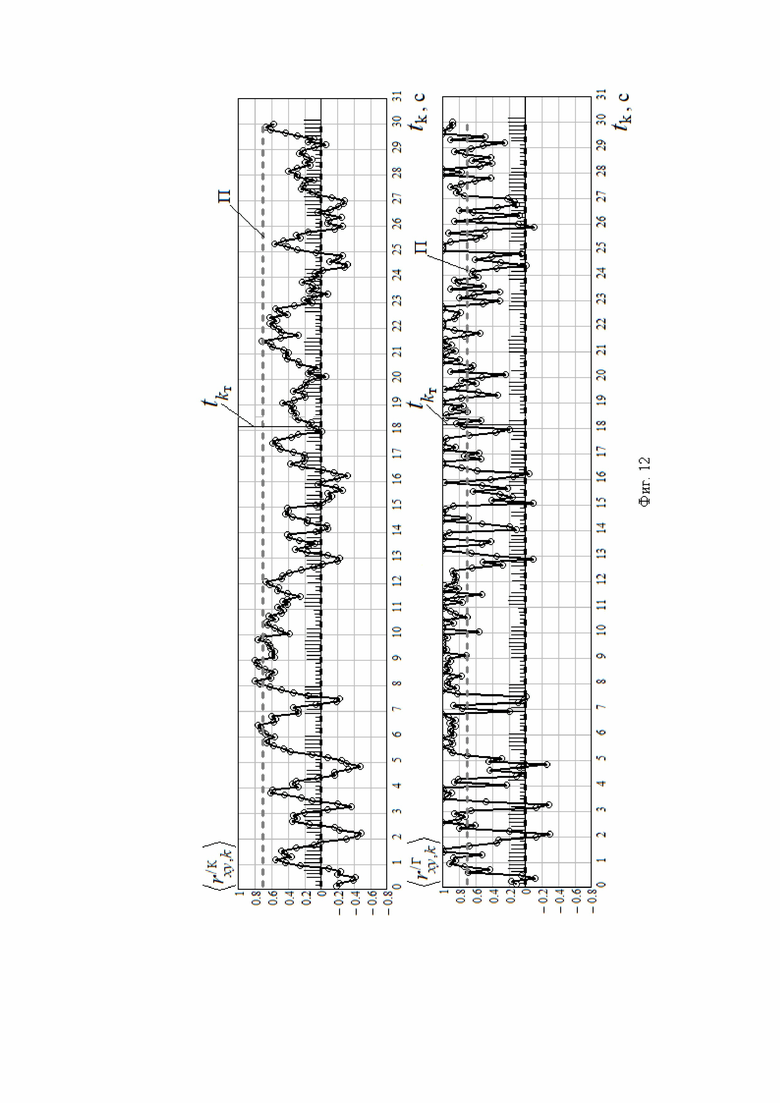
и КВКy для  . При необходимости результаты (2) можно сгладить комплементарным фильтром с оптимально подобранными коэффициентами усиления. В качестве иллюстрации на фиг. 12 представлены текущие значения отсчётов
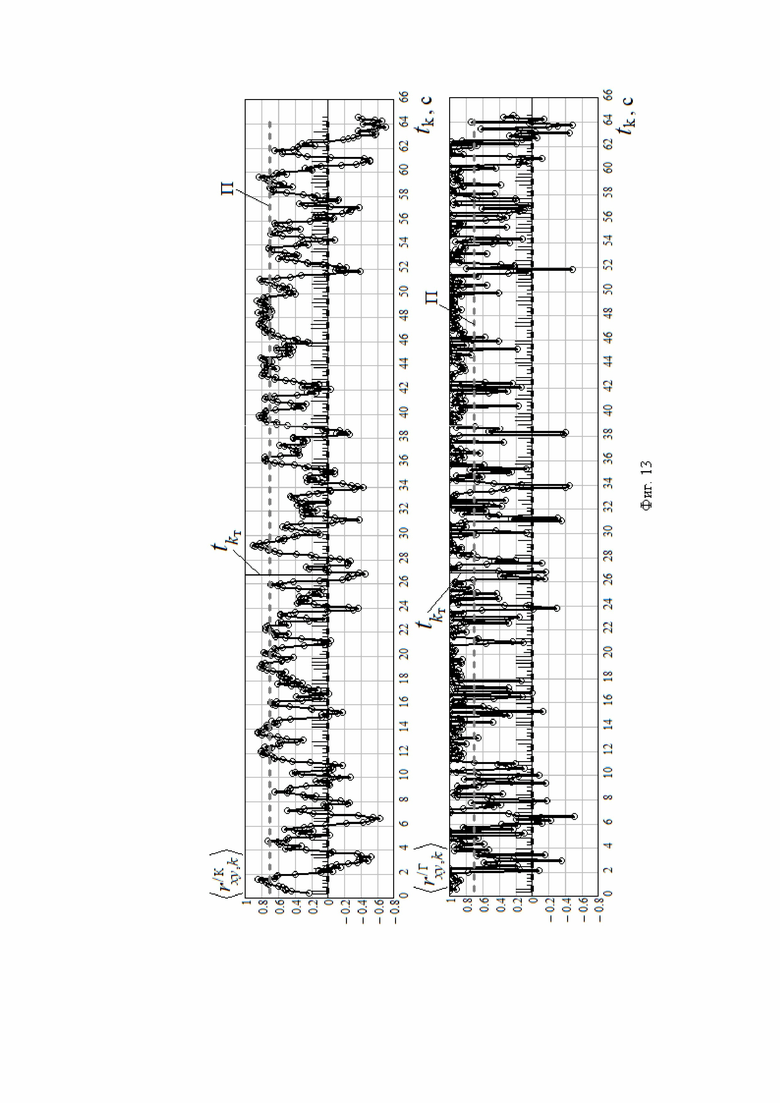
. При необходимости результаты (2) можно сгладить комплементарным фильтром с оптимально подобранными коэффициентами усиления. В качестве иллюстрации на фиг. 12 представлены текущие значения отсчётов  (3) для колёсного объекта (вверху) и для гусеничного объекта (внизу) при прогоне их по контрольно-испытательной трассе на траверзном её расстоянии до датчика равном 20 м при скорости движения объектов около 40 км/ч. На фиг. 13 аналогичные отсчёты для этих же подвижных наземных объектов при прогоне их по контрольно-испытательной трассе на траверзном её расстоянии до датчика равном 40 м при скорости движения объектов около 10 км/ч.
(3) для колёсного объекта (вверху) и для гусеничного объекта (внизу) при прогоне их по контрольно-испытательной трассе на траверзном её расстоянии до датчика равном 20 м при скорости движения объектов около 40 км/ч. На фиг. 13 аналогичные отсчёты для этих же подвижных наземных объектов при прогоне их по контрольно-испытательной трассе на траверзном её расстоянии до датчика равном 40 м при скорости движения объектов около 10 км/ч.
9. Из результатов, полученных с использованием (2), отбираются те отсчёты, которые превысили порог П до точки траверза kт
 (3)
(3)
При этом минимальное количество отсчётов, превысивших порог, должно быть не менее двух.
10. Определяется количество отсчётов в (3) Nr и окончательный результат определяется как среднеарифметическое значение всех Nr отсчётов
 . (4)
. (4)
Например, исходя из данных, представленных на фиг. 12 и фиг. 13, получим следующие величины КВК:  ≈ 0.76,
≈ 0.76,  ≈ 0.92 – с использованием данных фиг. 12 и ≈ 0.77, ≈ 0.925 – с использованием данных фиг. 13. Очевидно, что >. Проведенные натурные испытания с использованием упомянутых выше объектов наземной техники подтверждают данную тенденцию. Условия прогона обоих объектов по контрольно-испытательной трассе представлены ниже в таблице условий прогона техники 1.
≈ 0.92 – с использованием данных фиг. 12 и ≈ 0.77, ≈ 0.925 – с использованием данных фиг. 13. Очевидно, что >. Проведенные натурные испытания с использованием упомянутых выше объектов наземной техники подтверждают данную тенденцию. Условия прогона обоих объектов по контрольно-испытательной трассе представлены ниже в таблице условий прогона техники 1.
Таблица условий прогона техники 1
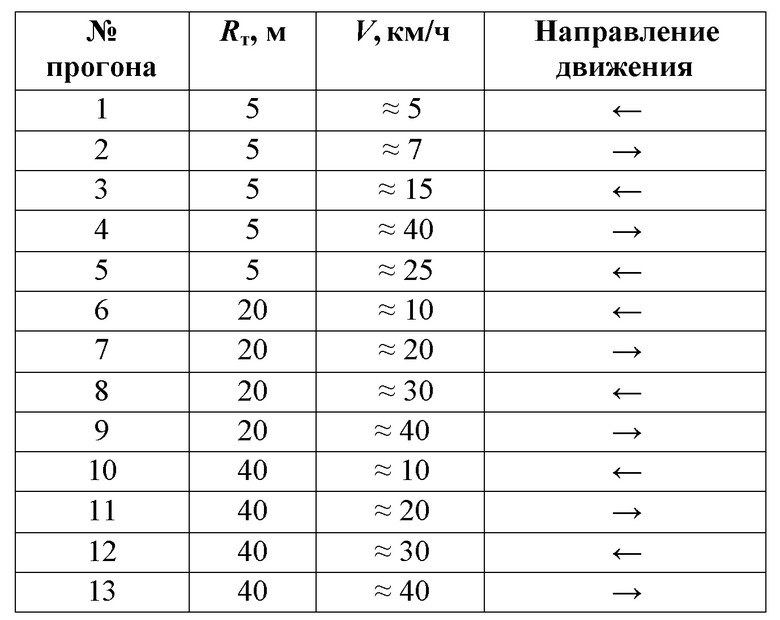
N
К = NГ = Nоб =13 – количество проездов по трассе колёсного и гусеничного объектов наземной техники. Обработка данных с использованием соотношения (4), обозначена как  , m = 0, 1, …, Nоб-1. Среднестатистические величины и среднеквадратические отклонения оценивались стандартными операциями:
, m = 0, 1, …, Nоб-1. Среднестатистические величины и среднеквадратические отклонения оценивались стандартными операциями:
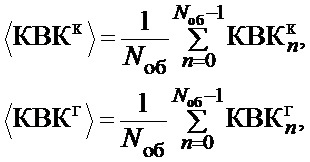

При этом все отсчёты  и
и  с вероятностью около 0.99 должны располагаться в соответствующих пределах
с вероятностью около 0.99 должны располагаться в соответствующих пределах
 , (5)
, (5)
 . (6)
. (6)
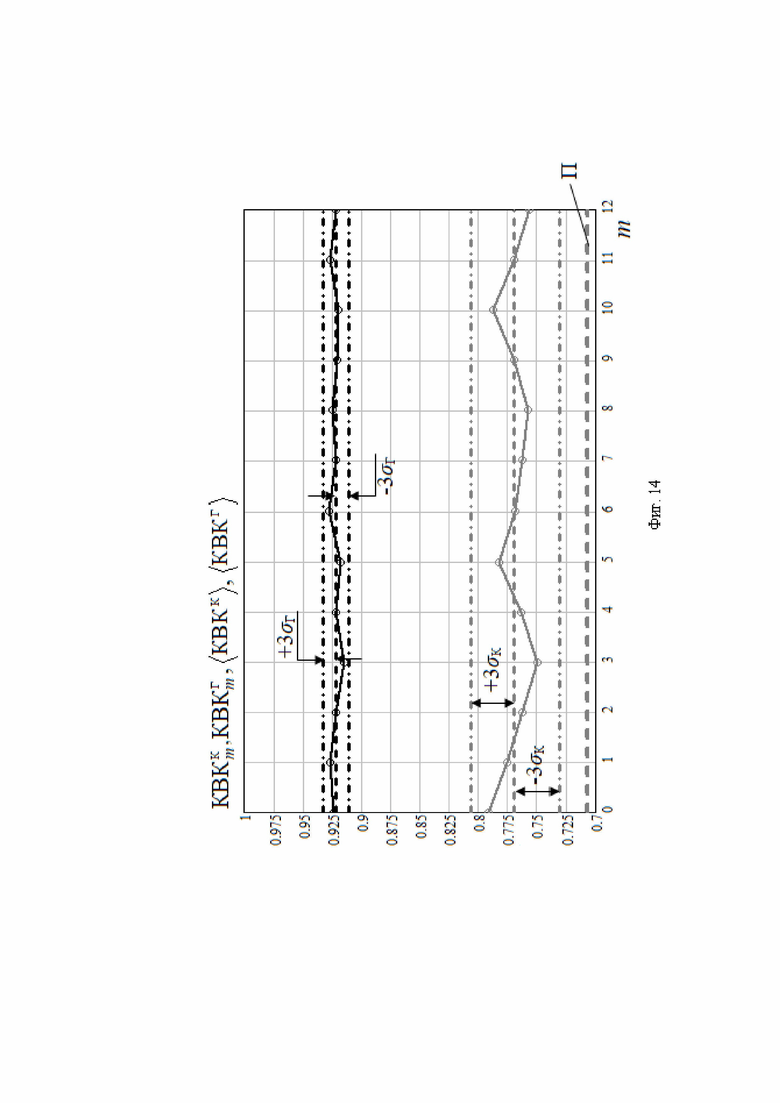
На фиг. 14 представлены результаты этой обработки в соответствии с условиями, представленными в таблице 1. На сплошной жирной серой линии кружочками показаны величины  , жирным серым штрихом показано их среднее значение
, жирным серым штрихом показано их среднее значение  , а нижний и верхний пределы (5) показаны серым жирным штрихпунктиром. Величины
, а нижний и верхний пределы (5) показаны серым жирным штрихпунктиром. Величины  ,
,  и пределы (6) представлены такими же линиями, но чёрного цвета. Анализ этих иллюстраций показывает, что зазор между верхним пределом
и пределы (6) представлены такими же линиями, но чёрного цвета. Анализ этих иллюстраций показывает, что зазор между верхним пределом  и нижним пределом
и нижним пределом  очень существенный по величине. Поэтому в качестве порога различения по классам «колесо»-«гусеница» рационально взять верхний предел для колёсной техники
очень существенный по величине. Поэтому в качестве порога различения по классам «колесо»-«гусеница» рационально взять верхний предел для колёсной техники  . Это должно обеспечивать высокую вероятность различения колёсной и гусеничной техники и малую вероятность их перепутывания. Ещё можно отметить тот факт, что для такой статистики разброс результатов (4) для автомобиля существенно больше, чем для БМП. Однако это может быть не так при более представительной статистике.
. Это должно обеспечивать высокую вероятность различения колёсной и гусеничной техники и малую вероятность их перепутывания. Ещё можно отметить тот факт, что для такой статистики разброс результатов (4) для автомобиля существенно больше, чем для БМП. Однако это может быть не так при более представительной статистике.
11. Формируют функцию классификации путём сравнения полученной величины либо , либо с порогами классификации  и
и 
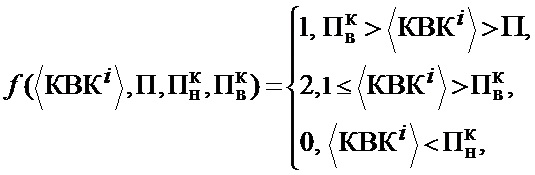
Здесь  . Тогда, если
. Тогда, если  , то обнаруженный объект относится к классу «колёсная техника», если
, то обнаруженный объект относится к классу «колёсная техника», если  - к классу «гусеничная техника», если же объект
- к классу «гусеничная техника», если же объект  , то классификация объекта считается неопределённой. В этом случае предусматривают специальные меры, но это лежит за спецификой данного способа.
, то классификация объекта считается неопределённой. В этом случае предусматривают специальные меры, но это лежит за спецификой данного способа.
Полезная особенность, способствующая минимизации влияния увеличения траверзного расстояния на возможный рост вероятности ложной классификации обнаруженных объектов, заключается в том, что амплитуда импульсов остаётся постоянной. Вследствие этого увеличение траверзного расстояния оказывается эквивалентным дополнительному воздействию помех, что выражается уменьшением длительность текущих периодов следования импульсов в некоторых позициях и существенно минимизируется при операциях усреднения. Этим также обеспечивается малая чувствительность предлагаемого способа к воздействию погодно-климатического фактора.
Следовательно, качества, заявленные в предлагаемом способе классификации объектов наземной техники, позволяют решить поставленную задачу.
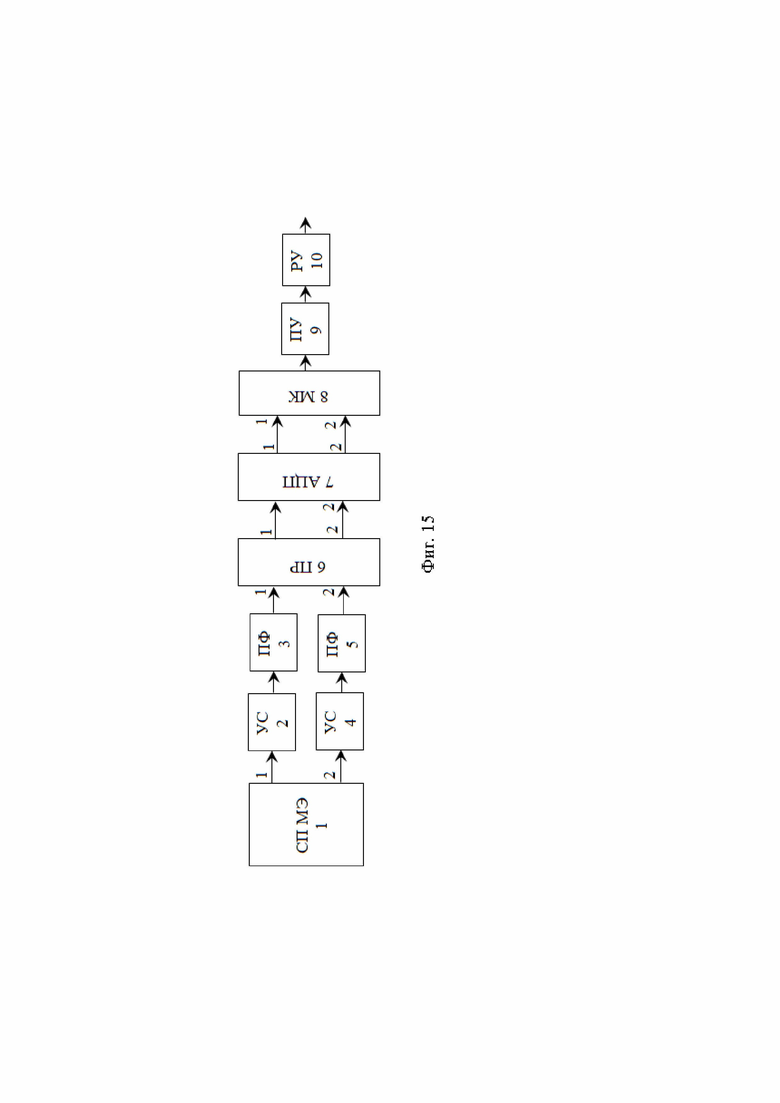
На фиг. 15 представлена укрупнённая блок схема устройства, реализующего предлагаемый способ, где введены следующие обозначения:
1 – молекулярно-электронный сейсмоприёмник (СП МЭ);
2, 4 – первый и второй усилители сигнала (УС);
3, 5 – первый и второй полосовые фильтры (ПФ);
6 – преобразователь сигналов в импульсную последовательность (ПР);
7 – аналогово-цифровой преобразователь (АЦП);
8 – микроконтроллер (МК);
9 – пороговое устройство (ПУ);
10 – решающее устройство (РУ).
Устройство содержит молекулярно-электронный сейсмоприёмник 1, первый выход которого через последовательно соединенные первый усилитель сигнала 2 и полосовой фильтр 3 подключен к первому входу преобразователя сигналов в импульсную последовательность 6. Второй выход СП МЭ 1 через последовательно соединенные второй УС 4 и второй ПФ 5 подключен ко второму входу ПР 6, первый и второй выходы которого соединены с первым и вторым входами АЦП 7 соответственно. Первый и второй выходы АЦП 7 соединены с первым и вторым входами микроконтроллера 8, выход которого соединен с входом порогового устройства 9, выход которого соединен с входом решающего устройства 10, выход которого является выходом всего устройства.
Работает устройство следующим образом.
Электрические сигналы с двух выходов молекулярно-электронного сейсмоприёмника 1 поступают на соответствующие входы усилителей сигналов 2 и 4, где усиливаются до необходимой величины. С выходов этих усилителей сигналы поступают на соответствующие входы полосовых фильтров 3 и 5 с полосой пропускания каждого равной Δf = 12 Гц и граничными частотами fн = 8 Гц, fв = 20 Гц. Отфильтрованные сигналы с выходов полосовых фильтров 3 и 5 поступают на два соответствующих входа преобразователя сигналов 6, где подвергаются соответствующей обработке и с двух его выходов импульсные последовательности поступают на соответствующие входы аналогово-цифрового преобразователя 7. Здесь они дискретизируются с частотой fd и с двух выходов аналогово-цифрового преобразователя 7 поступают на соответствующие входы микроконтроллера 8. В микроконтроллере 8 в зависимости от наличия или отсутствия объекта наземной техники осуществляется обработка пары дискретизированных импульсных последовательностей в соответствии с соотношениями, описанными выше. Результат в виде текущего значения либо , либо с выхода микроконтроллера 8 поступает на вход порогового устройства 9. В пороговом устройстве 9 реализуется функция классификации  . Результат работы порогового устройства 9 с его выхода поступает на вход решающего устройства 10, в котором принимается решение о наличии или отсутствии в принятом сейсмосигнале признаков подвижного объекта наземной техники. Принятое решение в соответствующем формате с выхода решающего устройства 10 поступает для дальнейшего использования.
. Результат работы порогового устройства 9 с его выхода поступает на вход решающего устройства 10, в котором принимается решение о наличии или отсутствии в принятом сейсмосигнале признаков подвижного объекта наземной техники. Принятое решение в соответствующем формате с выхода решающего устройства 10 поступает для дальнейшего использования.
Реализация подобного устройства не должна вызывать затруднений, так как все блоки, кроме первого являются стандартными и достаточно часто используемыми в патентах и инженерных разработках. Молекулярно-электронные сейсмоприёмники описаны, например, в [5 - 9]. Варианты их использования описаны в технической литературе, например, в [10 - 13].
Источники информации
1. Патент 2014619 (РФ). Датчик ускорения. МПК G01P 15/12. Колесникова Л.А., Полуянов В.А., Логинов П.М., Соболев М.Д. Заявка № 4955527/10 от 13.06.1991. Опубл. 15.06.1994 г.
2. Янчич В.В. Пьезоэлектрические акселерометры на основе монолитного блока с деформацией изгиба / В.В. Янчич // Зарубежная радиоэлектроника. – 1996. – № 9, стр. 63-64.
3. Патент 2204850 (РФ). Сейсмоприемник. МПК G01V 1/16. Доля В.К., Круглов А.К. Заявка 2002112574/28 от 13.05.2002. Опубл. 20.05.2003 г.
4. Патент 2703481 (РФ). Датчик для регистрации сейсмических колебаний. МПК G01V 1/16, G01V 1/18, G01V 1/20, H03B 9/12, СПК G01V 1/162, G01V 1/181, G01V 1/20. Заалишвили В.Б., Козырев Е.Н., Мельков Д.А., Аскеров Р.О. Заявка № 2019107234 от 13.03.2019. Опубл. 17.10.2019 г.
5. Авт. свид. 987531 (СССР). Молекулярно-электронный угловой акселерометр. МПК G01P 15/08. Н.В. Петькин, Ю.Н. Осипов, В.А. Федорин. Заявка № 3332583/18 от 17.08.1981. Опубл. 07.01.1983.
6. Авт. свид. 1458831 (СССР). Угловой акселерометр. МПК G01P 15/08, Н01G 9/12 / Б.Н. Костенко, В.И. Вертяев. Заявка № 4266349/24 от 22.06.1987. Опубл. 15.02.1989.
7. Патент 2404436 (РФ). Молекулярно-электронный преобразователь углового ускорения. МПК G01P 15/08. Агафонов В.М., Голицын В.Ю., Сафонов М.В., Чаплыгин А.А. Заявка № 2009138095/28 от 14.10.2009. Опубл. 20.11.2010 г.
8. Агафонов В.M. Принципы работы и технические характеристики малогабаритного молекулярно-электронного сейсмодатчика с отрицательной обратной связью / В.М. Агафонов, И.В. Егоров, А.С. Шабалина // Сейсмические приборы. – 2013. T. 49, № 1, с. 5-18
9. Патент 2723386 (РФ). Способ изготовления электродного узла молекулярно-электронного датчика линейных и угловых перемещений. МПК G01P 15/08, СПК G01P 15/08. Елохин В.А., Николаев В.И., Макаров Д.А. Заявка № 2020102151 от 20.01.2020. Опубл. 11.06.2020 г.
10. Патент 2457513 (РФ). Способы и системы для обработки микросейсмических данных. МПК G01V 1/28. ЛИНИ Скотт В. Заявка № 2010103987/28 от 04.07.2008. Опубл. 27.07.2012 г.
11. Патент 142159 (РФ). Многокомпонентный сейсморазведочный комплекс. МПК G08B 13/24. Агафонов В.М. Заявка № 2013109431/28 от 05.03.2013. Опубл. 20.06.2014 г.
12. Патент 78594 (РФ). Охранный сейсмический комплекс быстрого развертывания на основе молекулярно-электронных датчиков движения. МПК G08B 13/24Ю, G08C 21/00,G01V 1/16. Агафонов В.М., Бугаев А.С. Заявка № 2008116120/22 от 25.04.2008. Опубл. 27.11.2008 г.
13. Агафонов В.М. Определение направления на движущийся объект с использованием сейсмического модуля, содержащего молекулярно-электронные датчики движения / В.М. Агафонов, К. А. Афанасьев, А. В. Яшкин // Теоретическая и прикладная механика. Труды МФТИ. – 2013. — Том 5, № 2, стр. 142-149.
14. Патент 2202811 (РФ). Устройство обнаружения и классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Дюгованец А.П., Афанасенко А.В. Заявка № 2002113466/28 от 23.05.2002. Опубл. 20.04.2003 г.
15. Патент 2311665 (РФ). Сейсмическое устройство обнаружения и классификации объектов. МПК G01V 1/16. Сизов А.С., Стребков Д.А., Челышов С.Ю. Заявка № 2006112075/28 от 11.04.2006. Опубл. 27.11.2007 г.
16. Патент 2236027 (РФ). Устройство классификации сейсмических сигналов. МПК G01V 1/16. Крюков И.Н., Иванов В.А., Матвеев В.В. Заявка № 2003118053/28 от 19.06.2003. Опубл. 10.09.2004 г.
17. Баскаков С.И. Радиотехнические цепи и сигналы. / С.И. Баскаков. – М.: Высшая школа, 1983. 536 с.
18. Патент 2337405 (РФ). Устройство для обнаружения человека и группы людей по сейсмическим сигналам. МПК G08B 13/16, G01V 1/22. Дудкин В.А., Захаров С.М., Акимова Ю.С. Заявка № 2007120827/28 от 04.06.2007. Опубл. 27.10.2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773269C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| Способ классификации вертолётов с одним несущим винтом на режиме горизонтального полёта | 2024 |
|
RU2834238C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СЕЙСМОРЕГИСТРИРУЮЩАЯ СИСТЕМА ДЛЯ МОРСКИХ ИССЛЕДОВАНИЙ | 2021 |
|
RU2781800C1 |

Изобретение относится к области сейсмической разведки. Техническим результатом заявленного решения является повышение достоверности распознавания объекта по сейсмическому сигналу. Для реализации технического результата в заявленном решении предусмотрена возможность классификации подвижных объектов наземной техники по сейсмическому сигналу, возбуждаемому подвижным объектом наземной техники в поверхностном слое почвы, при этом усиленные и отфильтрованные электрические сигналы преобразуют в пару последовательностей однополярных импульсов постоянной амплитуды и дискретизируют; на заданном интервале усреднения определяют число границ передних фронтов импульсов в соответствующих последовательностях, оценивают величины текущих периодов следования импульсов, определяют средние значения периодов следования импульсов в последовательностях, определяют длительность скользящего временного окна, находят количество отсчётов, укладывающихся на длительности временного окна, с использованием полученных результатов вычисляют текущие средние значения коэффициента взаимной корреляции импульсных последовательностей до момента времени, соответствующего точке траверза включительно; отбирают те отсчёты текущих средних значений коэффициента взаимной корреляции, которые превысили стандартный порог. 24 ил.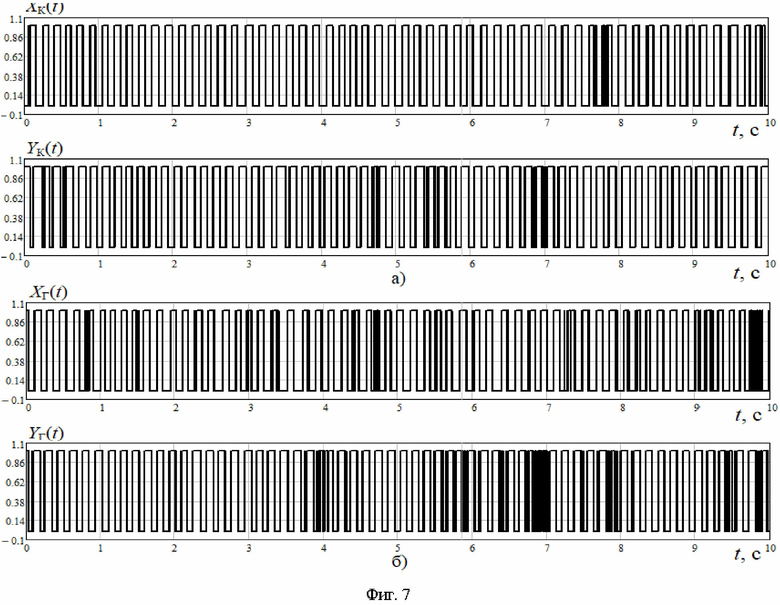
Способ классификации подвижных объектов наземной техники по сейсмическому сигналу, возбуждаемому подвижным объектом наземной техники в поверхностном слое почвы, включающий регистрацию этого сейсмосигнала, преобразование его в два электрических сигнала, их усиление и фильтрацию в заданной полосе частот, отличающийся тем, что усиленные и отфильтрованные электрические сигналы преобразуют в пару последовательностей однополярных импульсов постоянной амплитуды и дискретизируют в соответствии с теоремой Котельникова; на заданном интервале усреднения, определяют число границ передних фронтов импульсов в соответствующих последовательностях, оценивают величины текущих периодов следования импульсов, определяют средние значения периодов следования импульсов в последовательностях, определяют длительность скользящего временного окна как среднее значение этих средних периодов, находят количество отсчётов, укладывающихся на длительности временного окна, с использованием полученных результатов вычисляют текущие средние значения коэффициента взаимной корреляции импульсных последовательностей до момента времени, соответствующего точке траверза включительно; отбирают те отсчёты текущих средних значений коэффициента взаимной корреляции, которые превысили стандартный порог; определяют количество таких отсчётов, находят усреднённый коэффициент взаимной корреляции как их среднеарифметическое значение; на основе данных, полученных аналогичной обработкой некоторого количества прогонов объектов наземной техники заданных классов по одной и той же контрольно-испытательной трассе в одинаковых условиях оценивают стандартную величину порога классификации таких объектов – верхнего порога для колёсной техники; если вычисленный усреднённый коэффициент взаимной корреляции лежит между стандартным порогом и порогом классификации, то объект относят к классу «колёсный»; если же он лежит выше порога классификации, то объект относят к классу «гусеничный».
| D.S | |||
| PARIHAR et al.: "Seismic signal analysis for the characterisation of elephant movements in a forest environment", 31.05.2021, Найдено в: "https://doi.org/10.1016/j.ecoinf.2021.101329" | |||
| БАКИН Е.М | |||
| и др.: "Условия, влияющие на эффективность применения разведывательно-сигнализационного комплекса "РАДИОБАРЬЕР-МФ", 2020, [найдено:06.05.2022] |

