Изобретение относится к радиолокационной технике, а именно к моноимпульсным пеленгаторам для обзорных радиолокаторов, и может найти применение, например, в самолетных радиолокаторах, работающих в режиме сопровождения целей на проходе (СНП).
Уже известны моноимпульсные пеленгаторы для обзорных радиолокаторов /см. , например, П.И. Дудник, Ю.И. Чересов. "Авиационные радиолокационные устройства", изд. ВВА им. Н.Е. Жуковского, 1986 г., гл. 10, рис. 10.9 на стр. 297, П. И. Дудник. "Моноимпульсные радиолокационные устройства", серия Радиотехника (Итоги науки и техники), т.3, вып. Радиолокация и радионавигация, М., ВИНИТИ, 1972 г., рис. 3 на стр. 10, А.М. Зуфрин. "Методы построения судовых автоматических угломерных систем", изд. Судостроение, Ленинград, 1970, гл. 2, 1, рис. 2.7б на стр. 109 и рис. 7.1 на стр. 385, Н.Т. Василенко. "Радиолокационные системы селекции движущихся целей", серия Радиотехника (Итоги науки и техники), том 23, М., ВИНИТИ, 1980, стр. 141-142, рис. 3.10, Японский патент N 49-8896, заявл. 18.01.74 г., опубл. 22.06.78г., МКИ G 01 S 9/44 и др./.
Известные устройства содержат антенну с механизмом поворота и датчиком угла пеленга, угловой дискриминатор с выходами для азимутального и угломестного сигналов угловых ошибок. Известные устройства содержат также индикатор нуля, включенный последовательно с выходом углового дискриминатора для сигнала угловой ошибки в плоскости сканирования антенны (например, азимута). Указанный индикатор служит для фиксации момента совмещения оси антенны с направлением на цель.
В известных устройствах отклонение Δϕм цели от равносигнального направления антенны в плоскости ортогональной плоскости сканирования антенны (в плоскости угла места) оценивается посредством калибровки измеряемого сигнала ошибки UМ по крутизне μ пеленгационной характеристики, т.е. Δϕм= Uм/μ.
Недостатком известных устройств является снижение точности измерения угловых координат цели в плоскости ортогональной плоскости сканирования антенны из-за наличия ошибок калибровки сигнала ошибки по крутизне пеленгационной характеристики (см. например, Д. Бартон, Г. Вард. "Справочник по радиолокационным измерениям", М., Сов. радио, 1976, стр. 57).
Указанные ошибки возникают последующим причинам. Пеленгационные характеристики каждого из каналов пеленгации являются функциями угловых координат цели как в данной, так и ортогональной к ней плоскости пеленгации, что обусловлено пространственной формой диаграмм направленности парциальных антенных каналов, по сигналам которых они формируются. Однако в известных устройствах азимутальный и угломестный каналы пеленгации функционально независимы и не обеспечивают возможности использования измеряемых сигналов угловой ошибки одного из каналов пеленгации (например, азимутального Ua) для оценки угловых координат цели в другой (угломестной) плоскости, что снижает точность измерения углов.
Дополнительные ошибки калибровки возникают также из-за нелинейности пеленгационных характеристик.
Наиболее близким по технической сущности к заявляемому устройству является моноимпульсный пеленгатор для обзорного радиолокатора по Японскому патенту N 49-8896, изображенный на фиг. 1. Он содержит двумерную антенну с четырьмя парциальными каналами, механизмом поворота антенны в азимутальной плоскости и датчиками азимута и угла места, суммарно-разностный угловой дискриминатор (УД) с выходами для азимутального и угломестного сигналов ошибок, а также содержащий индикатор нуля (ИО), первый ключ, который своим сигнальным входом соединен с выходом датчика азимута, второй ключ, который своим сигнальным входом соединен с выходом УД для угломестного сигнала ошибки, причем ИО своим выходом соединен с управляющими входами обоих ключей. Известное устройство содержит также первый сумматор, который одним своим входом соединен с выходом датчика угла места, а другим своим входом через калибратор соединен с выходом второго ключа, причем выход первого сумматора является выходом пеленгатора для сигнала оценки угла места ϕмц, а выход первого ключа является выходом пеленгатора для сигнала оценки угла азимута ϕац.
В известном устройстве посредством индикации нуля азимутального сигнала ошибки фиксируется момент совмещения оси антенны с направлением на цель в азимутальной плоскости. В указанный момент времени посредством первого ключа производится отсчет азимута цели ϕац с выхода датчика азимута, установленного на оси антенны. При этом ось антенны в угломестной плоскости в общем случае не совпадает с направлением на цель, и потому угол места цели ϕмц оценивается в виде суммы двух составляющих
ϕмц= Δϕм+ϕмрсн
- углового смещения цели относительно оси антенны Δϕм, вычисляемого посредством калибровки угломестного сигнала ошибки UM по крутизне пеленгационной характеристики μ , т.е.
Δϕм= Uм/μ,
и текущего угла места антенны ϕмрсн, измеряемого датчиком угла места антенны.
Недостатком известного устройства является снижение точности измерения угла места из-за ошибок калибровки угломестного сигнала ошибки UM по крутизне пеленгационной характеристики μ.
Целью данного изобретения является устранение указанного недостатка, а именно повышение точности измерения угла места при строчном обзоре заданной области пространства по азимуту.
Поставленная цель достигается тем, что в известный моноимпульсный пеленгатор для обзорного радиолокатора, содержащий двумерную антенну 1 с механизмом поворота в азимутальной плоскости (11) и датчиками азимута 12 и угла места 13, установленными на оси антенны, а также содержащий суммарно-разностный угловой дискриминатор (УД-2) с выходами для азимутального Ua и угломестного UM сигналов ошибок, первый индикатор нуля (ИО-31), два ключа 41 и 42 и первый сумматор 5, причем первый индикатор нуля 31 входом соединен с выходом углового дискриминатора 2 для азимутального сигнала ошибки, а своим выходом с управляющим входом первого ключа 41, сигнальный вход которого соединен с выходом датчика азимута 12, а выход которого является выходом устройства для сигнала оценки азимута, цели, датчик угла места 1 3 соединен с одним из входов первого сумматора 5,
дополнительно введены второй индикатор нуля (ИО-32), второй сумматор 6, два запоминающих устройства 71 и 72, вычитатель 8, блок формирования модуля 9, умножитель 10, определитель полярности сигнала 11, счетчик 12, пороговое решающее устройство 13 и третий ключ 14, причем выходы углового дискриминатора 2 для азимутального и угломестного сигналов ошибок через второй сумматор 6 соединены со входом второго индикатора нуля (ИО-32), выход которого соединен с управляющим входом второго ключа 42, сигнальный вход которого соединен с выходом датчика азимута 12, выходы первого и второго ключей через первое и второе запоминающие устройства 71, 72 соответственно соединены со входами вычитателя 8, выход которого через блок формирования модуля 9 соединен с одним из входов умножителя 10, другой вход которого через определитель полярности сигнала 11 соединен с выходом углового дискриминатора 2 для угломестного сигнала ошибки UM, выход умножителя 10 соединен с другим входом первого сумматора 5, индикаторы нуля 31 и 32 своими выходами соединены со счетным входом счетчика 12, выход которого соединен со входом порогового решающего устройства 13, которое своим выходом соединено со входом счетчика 12 для сигнала сброса, а также с управляющим входом третьего ключа 14, который сигнальным входом соединен с выходом первого сумматора 5, а своим выходом соединен c выходом устройства для сигнала оценки угла места.
Введенные отличия обеспечивают повышение точности измерении угла места при строчном обзоре заданной области пространства по азимуту за счет устранения ошибок калибровки угломестного сигнала ошибки по крутизне пеленгационной характеристики.
В предложенном устройстве введенные отличия обеспечивают измерение угла места по данным отсчета значений азимута антенны на равносигнальных направлениях сигналов угловых ошибок Ua и UM, что устраняет ошибки калибровки по крутизне пеленгационной характеристики. Таким образом, у заявленного устройства появляется свойство, не совпадающее со свойством известного технического решения, заключающееся в повышении точности измерения угла места.
На фиг. 1 и 2 изображены функциональные схемы известного и заявляемого устройств.
Графическое обоснование возможности достижения заявляемого положительного эффекта приведено на фиг. 3. Устройство содержит двумерную антенну 1 с механизмом поворота в азимутальной плоскости (блок 11) и датчиками азимута ϕaрсн (блок 12) и угла места ϕмрсн (блок 13), суммарно-разностный угловой дискриминатор 2 с выходами для азимутального Ua и угломестного UM сигналов ошибок, первый и второй индикаторы нулей (ИО) - блоки 31 и 32, соответственно, первый, второй и третий ключи (блоки 41, 42 и 14, соответственно/, запоминающие устройства (ЗУ) - блоки 71 и 72, первый и второй сумматоры - блоки 5 и 6, соответственно, вычитатель 8, блок формирования модуля 9, умножитель 10, определитель полярности 11, счетчик 12 и пороговое решающее устройство 13.
Блоки 1, 11, 12, 13, 2, 31, 41, 42 и 5 предлагаемого устройства идентичны с одноименными блоками прототипа.
Блоки 41, 71 и 42, 72 осуществляют коммутацию сигнала с памятью и могут быть заимствованы, например, из книги У.Титце, К.Шенк. "Полупроводниковая схемотехника", М. , изд. Мир, 1983 г., раздел 17.4, стр. 284-286. Выходные напряжения блоков 71 и 72 при замкнутом положении ключей 41 и 42, соответственно, равны выходному сигналу ϕaрсн датчика азимута 12, а при разомкнутых положениях ключей - остаются такими, какими были в момент непосредственно предшествующий размыканию ключей, то есть
где Uyi - сигналы управления ключами (i == 1,2).
Счетчик 12 и пороговое решающее устройство 13 служат для счета числа n входных импульсов Uyi, сравнения его с порогом n≤2 и установки счетчика в нулевое положение по входу R при достижении n = 2. Схемы блоков 12 и 13 приведены, например, в книге "Проектирование радиолокационных приемных устройств", под ред. М.А. Соколова, М., Высшая школа, 1984 г., рис. 9.7 на стр. 243.
Индикаторы нуля 31 и 32 служат для фиксации моментов, соответствующих нулевым значениям входных сигналов Ua и Uy1 соответственно, и могут быть выполнены в виде решающего устройства с нулевым порогом.
Блоки 5, 6, 8-11, выполняющие операции суммирования, вычитания, умножения, выделения модуля и определения полярности, являются составной частью любого радиоэлектронного устройства и могут быть выполнены по типовым схемам, приведенным, например, в 1.5 на стр. 28-35 упомянутой выше книги под ред. М.А. Соколова.
Устройство работает следующим образом.
При повороте антенны 1 в плоскости азимута посредством блока 11 в случае попадания цели в пределы основного луча диаграммы направленности антенны на выходах парциальных антенных каналов формируются сигналы EA, EB, EC и E, поступающие на входы моноимпульсного суммарно-разностного углового дискриминатора 2, который формирует азимутальный Ua и угломестный UM сигналы угловых ошибок Ua= Δa/Σ; Uм= Δм/Σ, где
-сигналы разностных и суммарного каналов УД-2.
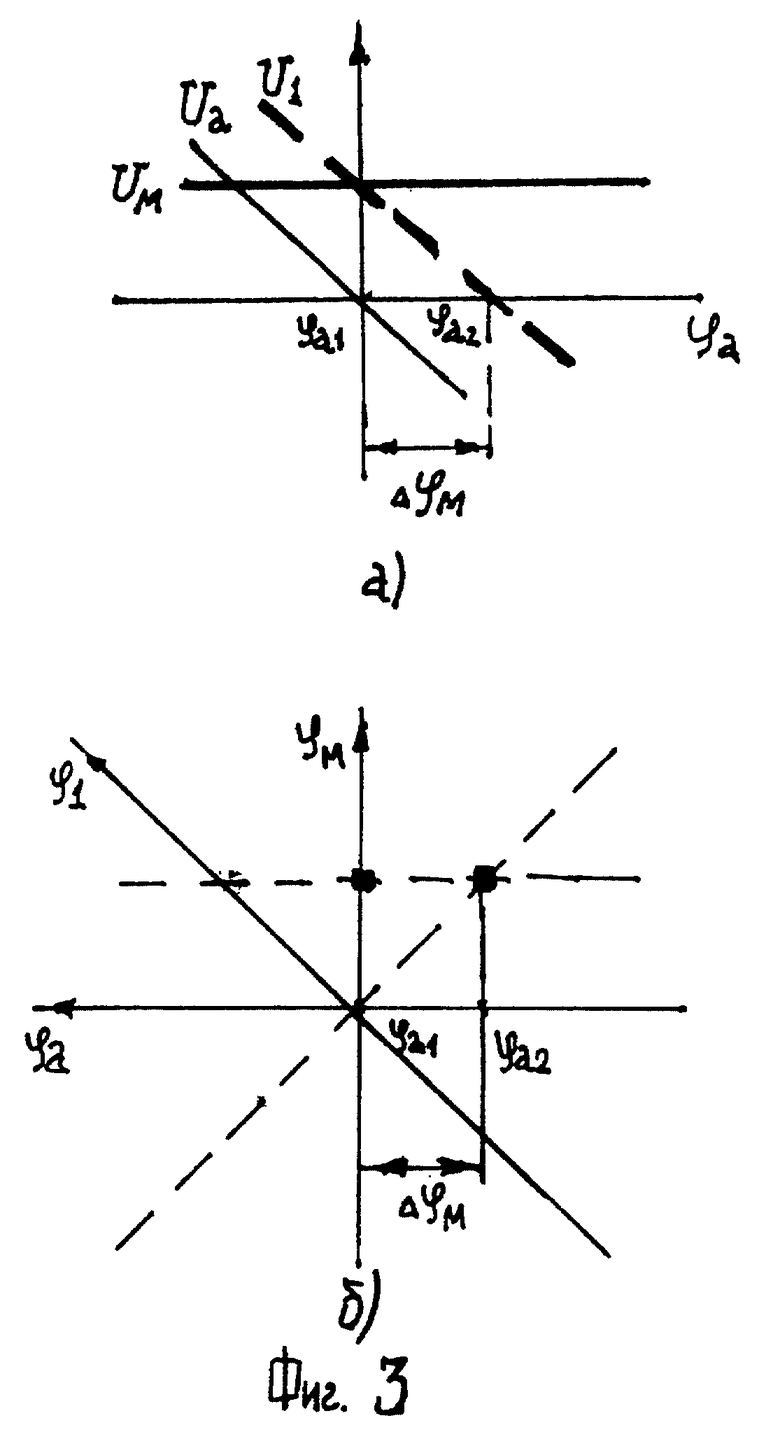
Величины и полярности измеряемых сигналов ошибок Ua и UM связаны с угловыми координатами цели через соответствующие пеленгационные характеристики, представляющие собой нечетные функции угловых координат относительно измерительной системы координат ϕa° ϕм, как показано на фиг. 3б.
При сложении сигналов Ua и UM в блоке 6 на его выходе формируется сигнал угловой ошибки
ось равносигнального направления ϕ1 которого на плоскости угловых координат ϕa° ϕм повернута на 45o (фиг.3).
В результате, поскольку в процессе сканирования антенны 1 по азимуту значение рассогласования по углу места Δϕм в общем случае не равно нулю, то индикация нулей сигналов угловых ошибок Ua и U1 будет производиться в различные моменты времени, соответствующие углам ϕa1 и ϕa2 (фиг.3), разность значений которых соответствует угловому рассогласованию цели по углу места Δϕм. Оценка Δϕм в предложенном устройстве производится следующим образом.
В блоки 31 и 32 поступают сигналы Ua и U1 для формирования сигналов Uy1 и Uy2 индикации нулей указанных сигналов ошибок. Выходные сигналы блоков 31 и 32 поступают на управляющие входы ключей 41 и 42 для синхронизации по времени моментов отсчета ϕa1 и ϕa2 с выхода датчика азимута антенны (блок 12). Далее посредством блоков 8 и 9 выделяется модуль разности указанных значений углов 
Угломестный сигнал ошибки UM с выхода УД-2 поступает на вход блока 11 для формирования сигнала оценки полярности, то есть Sign UM.
Умножитель 10 своими входами соединен с выходами блоков 9 и 11, в результате на его выходе формируется сигнал оценки углового смещении цели относительно равносигнального направления антенны в угломестной плоскости
Таким образом, предложенное построение устройства обеспечивает оценку величины Δϕм по результатам отсчета углов ϕa1 и ϕa2 в азимутальной плоскости, а знака Δϕм - по знаку угломестного сигнала ошибки UM. В результате этого устраняется операция калибровки UM по крутизне его пеленгационной характеристики, что обеспечивает существенное повышение точности измерения Δϕм.
В соответствии с данными, приведенными в справочнике по радиолокационным измерениям Д. Бартона и Г. Варда, М., Сов. радио, 1976 г., стр. 57, выигрыш в точности за счет устранении систематической составляющей угловой ошибки, обусловленной неправильной калибровкой угломестного сигнала ошибки, достигает двух и более раз.
Сигнал оценки угловых координат цели в угломестной плоскости ϕмц формируется на выходе сумматора 5 путем сложения сигналов оценок углового положения оси равносигнального направления антенны ϕмрсн , измеряемого посредством датчика угла места 13 и углового смещения цели относительно равносигнального направления Δϕм, то есть
ϕмц= ϕмрсн+Δϕм.
Технико-экономический эффект от использования данного изобретения в бортовых радиолокаторах истребителей и перехватчиков в сравнении с прототипом заключается в существенном повышении точности измерения угловых координат цели в угломестной плоскости при сопровождении цели на проходе в азимутальной плоскости.

Изобретение относится к радиолокации. Технический результат заключается в повышении точности измерения угловых координат цели. Пеленгатор содержит антенну с механизмом поворота в азимутальной плоскости и датчиками азимута и угла места, суммарно-разностный угловой дискриминатор, два индикатора нуля, три ключа, два сумматора, два запоминающих устройства, вычитатель, блок формирования модуля, умножитель, определитель полярности сигнала, пороговое решающее устройство и счетчик. 3 ил.
Моноимпульсный пеленгатор для обзорного радиолокатора, содержащий двумерную антенну с механизмом поворота в азимутальной плоскости и датчиками азимута и угла места, установленными на оси антенны, а также содержащий суммарно-разностный угловой дискриминатор с выходами для азимутального и угломестного сигналов ошибок, первый индикатор нуля, два ключа и первый сумматор, причем вход первого индикатора нуля соединен с выходом углового дискриминатора для азимутального сигнала ошибки, а выход - с управляющим входом первого ключа, сигнальный вход которого соединен с выходом датчика азимута, выход которого является выходом устройства для сигнала оценки азимута цели, а выход датчика угла места соединен с одним из входов первого сумматора, отличающийся тем, что, с целью повышения точности измерения угла места при сопровождении цели на проходе в азимутальной плоскости, в него введены второй индикатор нуля, второй сумматор, два запоминающих устройства, вычитатель, блок формирования модуля, умножитель, определитель полярности сигнала, счетчик, пороговое решающее устройство и третий ключ, при этом выходы углового дискриминатора для азимутального и угломестного сигналов ошибок через второй сумматор соединены с входом второго индикатора нуля, выход которого соединен с управляющим входом второго ключа, сигнальный вход которого соединен с выходом датчика азимута, выходы первого и второго ключей через первое и второе запоминающие устройства соответственно соединены с входами вычитателя, выход которого через блок формирования модуля соединен с одним из входов умножителя, второй вход которого через определитель полярности сигнала соединен с выходом углового дискриминатора для угломестного сигнала ошибки, выход умножителя соединен с вторым входом первого сумматора, выходы индикаторов нуля - со счетным входом счетчика, выход которого соединен с входом порогового решающего устройства, выход которого соединен с входом счетчика для сигнала сброса, а также с управляющим входом третьего ключа, сигнальный вход которого соединен с входом порогового решающего устройства, выход которого подключен к входу третьего ключа, сигнальный вход которого соединен с выходом первого сумматора, а выход - с выходом устройства для сигнала оценки угла места.
| Василенко Н.Т | |||
| Радиолокационные системы селекции движущихся целей | |||
| Сер.: Радиотехника (Итоги науки и техники) | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| - М.: ВИНИТИ, 1980, с.141 и 142, рис.3.10 | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |

