Изобретение относится к области радиолокационной техники и может быть использовано в моноимпульсных радиолокационных станциях (РЛС) сопровождения целей и ракет.
Известна РЛС моноимпульсной амплитудной суммарно-разностной системы с цифровой обработкой сигналов, состоящая из приемной фазированной антенной решетки (ФАР), передающей ФАР, схемы формирования суммарного и разностного канала, передающего устройства, генератора сигналов, трех смесителей и усилителя промежуточной частоты (УПЧ), трех устройств синхронного детектирования и аналого-цифрового преобразования, трех устройств прямого быстрого преобразования Фурье (БПФ), трех устройств перемножения спектров, трех устройств обратного БПФ, двух блоков нормировки, блока обнаружения, двух блоков измерения угловой координаты, блока измерения дальности и радиальной скорости, ЭВМ обработки информации, устройства управления, устройства хранения спектров опорных сигналов (Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - 2-е изд., перераб. И доп. - М.: Радио и связь, 1984, с.82-84, рис.4.15).
Недостатком данной РЛС является то, что возможные изменения коэффициентов усиления и фазовых характеристик приемных устройств разностных каналов, состоящих из смесителей и УПЧ, при перестройке рабочей частоты РЛС, а также из-за температурной и временной нестабильности приводят к изменению пеленгационной чувствительности РЛС, что приводит к увеличению ошибок измерения угловых координат цели и даже к срыву сопровождения целей при изменении знака пеленгационной характеристики (Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - 2-е изд., перераб. И доп. - М.: Радио и связь, 1984, с.172-180).
Известен моноимпульсный радиолокатор, содержащий генератор контрольных сигналов в виде вынесенного контрольного ответчика, узла автоматической подстройки фазы (АПФ), компенсирующего с помощью управляемых фазовращателей фазовую ошибку в сквозных трактах высокой и промежуточной частоты, которая обнаруживается путем сравнения измеренного угла контрольного датчика с его известным истинным значением (Патент РФ № 2183329, МПК G01S 13/44, 7/40; H01Q 3/00, 2000).
Недостатками данного решения являются трудность использования вынесенного контрольного ответчика в РЛС, расположенных на мобильных носителях, невозможность оперативной перестройки частоты контрольного ответчика при перестройке рабочей частоты радиолокатора, отсутствие калибровки коэффициентов усиления приемных каналов, усложнение конструкции и возможное уменьшение чувствительности приемных каналов, связанное с введением дополнительных фазовращателей.
Наиболее близким по технической сущности к заявляемому объекту является моноимпульсная трехканальная суммарно-разностная радиолокационная станция, содержащая моноимпульсную антенну с приводом, блок управления антенной по углу места и азимуту, ВЧ-тракт суммарно-разностной обработки, три смесителя первой группы смесителей, циркулятор, передатчик, задающий генератор частоты, усилители. Дополнительно в РЛС введены (с целью обеспечения стабильности сигнала ошибки по углу при фиксированном положении антенны и неизвестной частоте входного сигнала и обеспечения когерентной обработки входных сигналов с изменяющейся частотой) ответвитель, соединенный с выходом усилителя суммарного канала, вторая группа из трех смесителей, трех усилителей, формирователь внутреннего гетеродинного сигнала, три усилителя-преобразователя, три фильтра, аналого-цифровые преобразователи, вычислитель (Патент РФ № 2296347, МПК G01S 13/44, 2005).
Однако это техническое решение имеет те же недостатки, что и первое приведенное устройство, а именно: возможные изменения коэффициентов усиления и фазовых характеристик приемных устройств разностных каналов, состоящих из смесителей и УПЧ, при перестройке рабочей частоты, а также из-за температурной и временной нестабильности элементов приводят к изменению пеленгационной чувствительности РЛС, что приводит к увеличению ошибок измерения угловых координат цели вплоть до срыва сопровождения.
Таким образом, задачей изобретения является повышение точности определения угловых координат за счет обеспечения стабильности пеленгационной чувствительности РЛС при изменении рабочей частоты и нестабильности коэффициентов передачи и фазовых характеристик приемных каналов при одновременном упрощении приемной системы.
Техническим результатом заявляемой РЛС является повышение стабильности пеленгационной чувствительности путем калибровки коэффициентов усиления и фазовых характеристик ее приемных каналов.
Поставленная задача достигается тем, что в известную РЛС, содержащую приемопередающую фазированную антенную решетку, моноимпульсный облучатель, трехканальное приемное устройство, аналого-цифровые преобразователи, передающее устройство, генератор сигналов и вычислитель, дополнительно введен излучатель, вход которого соединен с генератором сигналов, а выход - с моноимпульсным облучателем, причем выход вычислителя является выходом моноимпульсной радиолокационной станции.
Излучатель выполнен в виде диэлектрической антенны.
Излучатель выполнен в виде рупорной антенны.
Заявляемая РЛС обладает совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемая РЛС, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность изобретения поясняется с помощью структурной схемы.
РЛС содержит приемопередающую фазированную антенную решетку 1, моноимпульсный облучатель 2, трехканальное приемное устройство 3, аналого-цифровые преобразователи 4, передающее устройство 5, генератор 6 сигналов, вычислитель 7. В РЛС дополнительно введен излучатель 8, вход которого соединен с генератором 6 сигналов, а выход - с моноимпульсным облучателем 2.
При настройке РЛС коэффициенты передачи и фазовые характеристики разностных и суммарного каналов корректируются в цифровом виде в вычислителе 7 путем умножения сигналов разностных каналов на комплексные корректирующие коэффициенты, которые выбираются такими, чтобы обеспечить оптимальную пеленгационную чувствительность и максимальную точность определения угловых координат цели. Комплексные корректирующие коэффициенты запоминаются в вычислителе 7. После этого включается «Пилот-сигнал», измеряются амплитуды сигналов на выходе суммарного и разностных каналов и фазовые сдвиги между сигналами на выходе суммарного и разностных каналов и запоминаются в вычислителе 7. «Пилот-сигнал» представляет собой СВЧ-сигнал с частотой, находящейся в полосе приемного устройства 3 РЛС. В дальнейшем при работе РЛС при проведении автоматической калибровки включается «Пилот-сигнал» и производится измерение амплитуды сигналов и фазовых сдвигов между сигналами на выходе суммарного и разностных каналов после умножения на комплексные корректирующие коэффициенты. В случае отклонения измеренных значений от занесенных в вычислитель 7 производится коррекция комплексных корректирующих коэффициентов в вычислителе 7 так, чтобы свести отклонения к минимуму. Также «Пилот-сигнал» может использоваться для автоматического контроля исправности моноимпульсного облучателя 2, приемного устройства 3, генератора сигналов 6 и вычислителя 7.
Конструктивно излучатель 8 расположен в месте, обеспечивающем попадание «Пилот-сигнала» в моноимпульсный облучатель 2 таким образом, чтобы обеспечить примерное равенство мощности сигналов суммарного и разностных каналов на его выходах.
Излучатель может быть выполнен, например, в виде диэлектрической антенны или в виде рупорной антенны.
Моноимпульсная РЛС с автоматической калибровкой работает следующим образом.
При включении РЛС, а также периодически во время работы проводится автоматическая калибровка. Генератор 6 формирует «Пилот-сигнал», который поступает через излучатель 8 на вход моноимпульсного облучателя 2, в котором формируются сигналы трех приемных каналов: суммарного Fcyм, разностного по углу места Fум, разностного по азимуту Faз, которые поступают на трехканальное приемное устройство 3. На трехканальное приемное устройство 3 также поступает с выхода генератора 6 сигнал гетеродина Fгет. В приемном устройстве 3 сигналы суммарного и разностного каналов усиливаются, преобразуются по частоте и фильтруются.
С выходов приемного устройства сигналы суммарного и разностных каналов поступают на АЦП 4, где преобразуются в цифровую форму и передаются в вычислитель 7.
В вычислителе 7 производятся согласованная фильтрация и когерентное накопление сигналов в суммарном и разностных каналах, в результате чего формируются комплексные сигналы суммарного канала Хсум, канала азимутам и канала угла места Хум.
Далее эти сигналы умножаются на комплексные корректирующие коэффициенты суммарного канала Ксум, каналов азимута Каз и угла места Кум, которые вычисляются заранее при настройке РЛС и хранятся в памяти вычислителя 7, в результате чего производится компенсация изменения коэффициентов усиления и фазовых характеристик суммарного и разностных каналов азимута и угла места приемного устройства 3. Полученные после умножения на корректирующие коэффициенты сигналы Х/сум, Х/аз, Х/ум сравниваются по амплитуде с образцовыми значениями Х//сум, Х//аз, Х//ум, измеренными при настройке РЛС и хранящимися в памяти вычислителя 7. Также производится сравнение фазовых сдвигов между измеренными сигналами Х/сум и Х/аз, X/сум и Х/ум с фазовыми сдвигами между хранящимися в памяти сигналами Х//сум и Х//аз, Х//сум и Х//ум. В случае отклонения измеренных значений от хранящихся в памяти, производится вычисление новых значений корректирующих коэффициентов Ксум, Каз, Кум таких, чтобы свести разницу между амплитудой и фазовыми сдвигами сигналов Х/сум, Х/аз, Х/ум и сигналов Х//сум, X//аз, X//ум к минимуму. Новые значения корректирующих коэффициентов Ксум, Каз, Кум перезаписываются в память вычислителя и используются при дальнейшей работе РЛС. Калибровка производится для каждого значения несущей частоты РЛС.
В режиме пеленгации цели генератор 6 формирует сигнал с частотой Fпep, который подается в передающее устройство 5, где усиливается и подается на вход передающего канала моноимпульсного облучателя 2. С выхода моноимпульсного облучателя 2 зондирующий сигнал с частотой Fпep поступает на приемопередающую фазированную антенную решетку 1, формирующую диаграмму направленности антенны в заданном направлении пространства, и излучается в направлении цели. Сигнал управления положением диаграммы направленности поступает из вычислителя 7.
Отраженный от цели сигнал поступает через приемопередающую фазированную антенную решетку 1 в моноимпульсный облучатель 2, в котором формируются сигналы трех приемных каналов: суммарного Fcyм, разностного по углу места Fyм, разностного по азимуту Faз, которые поступают на трехканальное приемное устройство 3. На трехканальное приемное устройство 3 также поступает с выхода генератора 6 сигнал гетеродина Fгет. В приемном устройстве 3 сигналы суммарного и разностного каналов усиливаются, преобразуются по частоте и фильтруются.
С выходов приемного устройства сигналы суммарного и разностных каналов поступают на АЦП 4, где преобразуются в цифровую форму и передаются в вычислитель 7.
В вычислителе 7 производится согласованная фильтрация и когерентное накопление сигналов в суммарном и разностных каналах, в результате чего формируются комплексные сигналы суммарного канала Хсум, канала азимута Хаз и канала угла места Хум.
Далее эти сигналы умножаются на комплексные корректирующие коэффициенты суммарного канала Ксум, каналов азимута Каз и угла места Кум, которые вычисляются заранее при автоматической калибровке РЛС и хранятся в памяти вычислителя 7, в результате чего производится компенсация изменения коэффициентов усиления и фазовых характеристик суммарного и разностных каналов азимута и угла места приемного устройства 3.
Полученные после умножения на корректирующие коэффициенты сигналы Х/сум, Х/аз, Х/ум используются для вычисления угловых координат цели по формулам:


где kаз - пеленгационная чувствительность по азимуту;
kум - пеленгационная чувствительность по углу места;
Re(X/aз) - действительная часть сигнала Х/аз;
Re(X/cyм) - действительная часть сигнала X/сум;
Rе(Х/ум) - действительная часть сигналах Х/ум
Im(Х/аз) - мнимая часть сигнала Х/аз;
Im{Х/сум) - мнимая часть сигнала Х/сум;
Im(Х/ум) - мнимая часть сигнала X/ум
Вычисленные угловые координаты цели  и
и  поступают на выход РЛС, а также используются в вычислителе 7 для расчета сигналов управления, поступающих на фазированную антенную решетку 1 для управления положением диаграммы направленности антенны при сопровождении цели.
поступают на выход РЛС, а также используются в вычислителе 7 для расчета сигналов управления, поступающих на фазированную антенную решетку 1 для управления положением диаграммы направленности антенны при сопровождении цели.
На предприятии-заявителе разработана конструкторская документация заявляемой моноимпульсной РЛС с автоматической калибровкой, изготовлен макетный образец, испытания которого подтвердили преимущества по сравнению с известными устройствами, в том числе с прототипом, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсная радиолокационная станция с автоматической калибровкой | 2016 |
|
RU2632477C1 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| РАДИОЛОКАЦИОННАЯ МОНОИМПУЛЬСНАЯ АМПЛИТУДНАЯ СУММАРНО-РАЗНОСТНАЯ СИСТЕМА | 2022 |
|
RU2793137C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2007 |
|
RU2348001C1 |
| ПРИЕМНЫЙ МОНОИМПУЛЬСНЫЙ ОБЛУЧАТЕЛЬ | 2005 |
|
RU2289872C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2015 |
|
RU2606707C1 |
Изобретение относится к области радиолокационной техники и может быть использовано в моноимпульсных радиолокационных станциях (РЛС) сопровождения целей и ракет. Моноимпульсная РЛС позволяет повысить стабильность пеленгационной чувствительности путем калибровки коэффициентов усиления и фазовых характеристик ее приемных каналов, что и является достигаемым техническим результатом изобретения. РЛС содержит приемопередающую фазированную антенную решетку, моноимпульсный облучатель, трехканальное приемное устройство, три аналого-цифровых преобразователя, передающее устройство, генератор сигналов, вычислитель, соединенные определенным образом между собой, при этом РЛС также содержит излучатель, вход которого соединен с генератором сигналов, а выход - с моноимпульсным облучателем, причем выход вычислителя является выходом моноимпульсной радиолокационной станции. В дополнительных пунктах приведено конкретное выполнение излучателя. 4 з.п. ф-лы, 1 ил.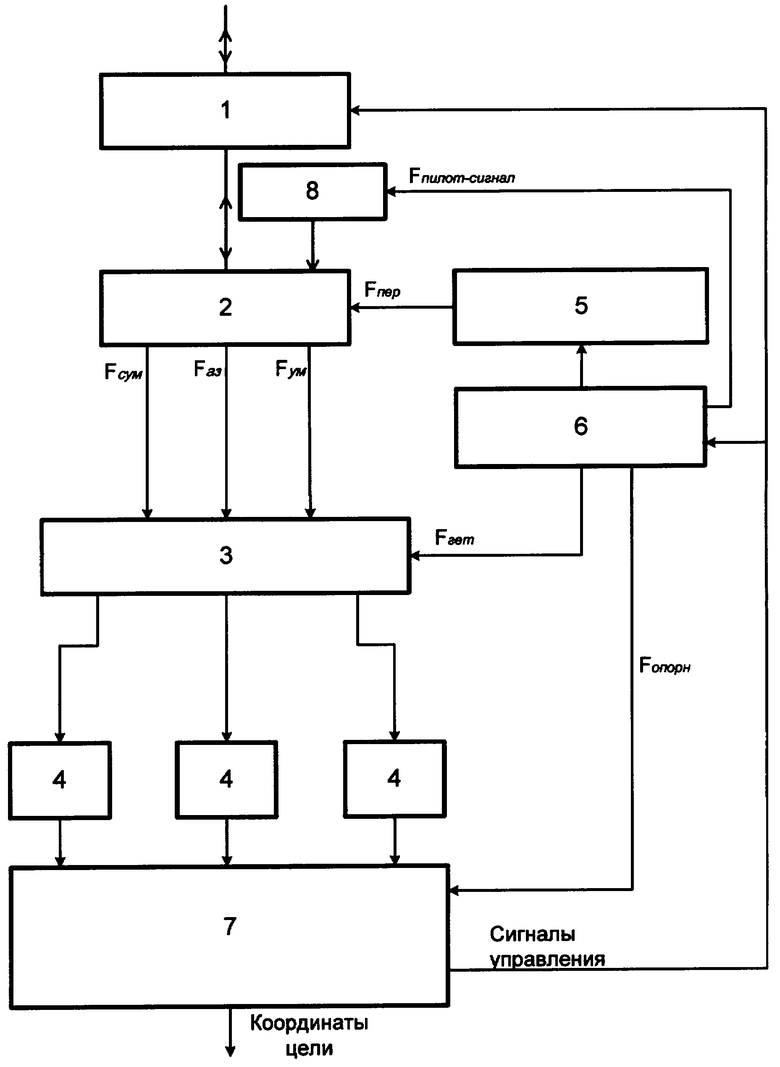
1. Моноимпульсная радиолокационная станция (РЛС) с автоматической калибровкой, содержащая приемопередающую фазированную антенную решетку, моноимпульсный облучатель, трехканальное приемное устройство, аналого-цифровые преобразователи, передающее устройство, генератор сигналов и вычислитель, отличающаяся тем, что в нее дополнительно введен излучатель, вход которого соединен с генератором сигналов, при этом генератор сигналов формирует «пилот-сигнал», представляющий собой сверхвысокочастотный сигнал с частотой, находящейся в полосе трехканального приемного устройства РЛС, который через излучатель поступает на вход моноимпульсного облучателя, в котором формируются сигналы для трех приемных каналов - суммарного, разностного по углу места и разностного по азимуту, которые поступают на трехканальное приемное устройство, на которое также поступает сигнал гетеродина с выхода генератора сигналов, с выходов трехканального приемного устройства сигналы суммарного и разностных каналов поступают в аналого-цифровые преобразователи и передаются в вычислитель, предназначенный для формирования комплексных сигналов суммарного канала, канала азимута и канала угла места с обеспечением компенсации изменения коэффициентов усиления и фазовых характеристик сигналов суммарного и разностных каналов азимута и угла места трехканального приемного устройства путем умножения их на комплексные корректирующие коэффициенты, запомненные в вычислителе, при этом, в случае отклонения измеренных значений характеристик сигналов от хранящихся в памяти, в вычислителе производится вычисление новых значений корректирующих коэффициентов до получения минимальной разницы между амплитудами и фазовыми сдвигами измеренных сигналов и сигналов, хранящихся в памяти, кроме того, генератор сигналов формирует сигнал с частотой передатчика, который подается в передатчик и на вход передающего канала моноимпульсного облучателя, с выхода которого зондирующий сигнал с частотой передатчика поступает на приемопередающую фазированную антенную решетку, формирующую диаграмму направленности в заданном направлении пространства, и излучается в направлении цели, сигнал управления положением диаграммы направленности поступает из вычислителя, при этом автоматическая калибровка производится для каждого значения несущей частоты при включении РЛС.
2. Моноимпульсная радиолокационная станция с автоматической калибровкой по п.1, отличающаяся тем, что излучатель выполнен в виде диэлектрической антенны.
3. Моноимпульсная радиолокационная станция с автоматической калибровкой по п.1, отличающаяся тем, что излучатель выполнен в виде рупорной антенны.
4. Моноимпульсная радиолокационная станция с автоматической калибровкой по п.1, отличающаяся тем, что «пилот-сигнал» используется также для автоматического контроля генератора сигналов и вычислителя.
5. Моноимпульсная радиолокационная станция с автоматической калибровкой по п.1, отличающаяся тем, что автоматическая калибровка производится периодически во время работы РЛС.
| МОНОИМПУЛЬСНАЯ ТРЕХКАНАЛЬНАЯ СУММАРНО-РАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2296347C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОБРАЗОВАНИЯ БЕЛЫХ ПЯТЕН ИЛИ ТОЧЕК НА БАРИТОВОЙ ФОТОГРАФИЧЕСКОЙ БУМАГЕ | 1940 |
|
SU60272A1 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| RU 2070726 C1, 20.12.1996 | |||
| US 5315304 A, 24.05.1994 | |||
| US 6853330 B1, 08.02.2005 | |||
| Способ доводки конической поверхности детали | 1986 |
|
SU1341001A1 |
| US 4719465 A, 12.01.1988 | |||
| Полимерный состав для промывки скважин | 1982 |
|
SU1073273A1 |
| KR 20000052660 A, 25.08.2000. | |||

