Изобретение относится к устройству зарядки высоковольтной батареи, в частности, автотранспортного средства на электрической тяге, от однофазной сети питания.
В системах зарядки высоковольтной батареи электрическая мощность поступает от сети последовательно через два преобразователя: понижающий преобразователь напряжения ("buck") и повышающий преобразователь напряжения ("boost"). Эти два преобразователя - позволяют соответственно понижать и повышать коэффициент напряжения между их выходной клеммой и их входной клеммой на частоте, которую задают в зависимости от необходимого выходного тока и/или от необходимого выходного напряжения.
Такие системы зарядки описаны, например, в патентной заявке FR 2 943 188, в которой раскрыта бортовая система зарядки для автотранспортного средства, обеспечивающая зарядку от трехфазной или однофазной цепи батареи транспортного средства. Цепь зарядки включает в себя катушки электрической машины, которая обеспечивает также другие функции, такие как генерирование тока или обеспечение движения транспортного средства.
Разделение тока, поступающего от сети электроснабжения, позволяет выделить высокочастотные составляющие в отбираемом токе, то есть гармоники порядка, более высокого, чем основная частота сети электроснабжения, обычно равная 50 Гц.
Поскольку распределитель электроэнергии задает стандарт гармоник отбираемого тока, такая система зарядки содержит также фильтр типа RLC (резистивно-индуктивно-емкостной) на входе понижающего преобразователя напряжения. Этот фильтр вызывает смещение фазы между поступающими из сети током и напряжением. Это смещение фазы приводит к появлению в сети реактивной мощности, которую пользователь не отбирает и которую необходимо свести к минимуму.
Кроме того, внутренние сети электроснабжения в основном являются однофазными сетями электроснабжения. Таким образом, транспортное средство, содержащее устройство зарядки батареи от однофазной сети, можно подзаряжать от внутренней сети электроснабжения, например, в частном гараже или на частной стоянке.
Зарядка от однофазной сети электроснабжения имеет определенные особенности.
В зависимости от ее топологии нет возможности согласовывать по фазе входной ток с напряжением сети. Кроме того, когда входное синусоидальное напряжение приближается к нулю, система моментально становится неуправляемой. Кроме того, для установления непрерывного силового потока в накопительной катушке индуктивности электрической машины между понижающим преобразователем напряжения и повышающим преобразователем напряжения должен циркулировать не равный нулю ток. При этом возникает проблема значения тока, проходящего через катушку индуктивности во время фаз неуправляемости системы. Действительно, во время этих фаз невозможно управлять током, проходящим через катушку индуктивности.
Одним из решений является использование накопительной катушки с повышенной индуктивностью, чтобы ток в катушке индуктивности не успевал упасть до нулевого значения. Недостатком этого решения является большой объем этой катушки индуктивности.
Учитывая вышеизложенное, изобретение призвано предложить способ зарядки батареи, который позволяет по меньшей мере частично устранить вышеупомянутые недостатки.
В частности, изобретение призвано предложить способ зарядки, позволяющий избежать прохождения через ноль значения тока, проходящего в катушке индуктивности электрической машины.
Задачей изобретения является также повышение энергетического КПД зарядных систем.
Изобретение призвано также предложить способ зарядки, который не требует использования катушки с высоким значением индуктивности.
В связи с этим объектом изобретения является способ управления зарядкой батареи, в частности, батареи автотранспортного средства от однофазной сети, в котором:
- фильтруют входное напряжение,
- на батарею подают электрическую мощность от сети через каскад понижения напряжения и каскад повышения напряжения, связанные между собой через индуктивный компонент; и
- контролируют силу тока, проходящего через указанный индуктивный компонент, в зависимости от заданного значения силы тока, при этом указанная сила тока не является непрерывно управляемой.
Согласно общему отличительному признаку этого способа, вырабатывают заданное значение силы тока таким образом, чтобы указанное заданное значение силы тока имело по меньшей мере одно первое значение и по меньшей мере одно второе значение, превышающее первое значение, при этом заданное значение силы тока имеет второе значение до начала фазы, во время которой сила тока является неуправляемой.
В ходе фаз, во время которых ток является неуправляемым, называемых также фазами неуправляемости, сила тока, проходящего через индуктивный компонент, может только понижаться. Таким образом, выбирая второе заданное значение достаточном большим, можно избежать, чтобы ток, проходящий через индуктивный компонент, достиг нежелательного нулевого значения. С другой стороны, учитывая, что заданное значение принимает первое значение за пределами фаз неуправляемости, среднее значение силы тока, проходящего через индуктивный компонент, существенно снижается, например, по сравнению с постоянным заданным значением, принимающим второе значение. Таким образом, повышается энергетический КПД зарядки.
Согласно варианту осуществления, вырабатывают заданное значение силы тока таким образом, чтобы указанное заданное значение имело третье значение, меньшее первых двух значений, при этом заданное значение переходит от второго к третьему значению в ходе фазы, во время которой сила тока является неуправляемой.
Таким образом, благодаря заданному значению, принимающему значение, меньшее двух первых значений, в конце фаз неуправляемости увеличивают ток, проходящий через индуктивный компонент, начиная от более низкого значения, что соответственно уменьшает среднее значение этого тока.
Согласно варианту осуществления, вырабатывают заданное значение силы тока таким образом, чтобы после принятия третьего значения заданное значение перешло от третьего к первому значению в соответствии с возрастающей аффинной функцией.
Таким образом, после возвращения к управляемости ток, который будет следовать своему заданному значению, начинается от значения, меньшего двух первых значений, и медленно доходит до первого значения. Это позволяет избегать слишком резкого увеличения тока, которое, действительно, может генерировать на токе гармоники и/или привести к превышению заданного значения силы индуцируемого тока.
Согласно другому варианту осуществления, вырабатывают заданное значение силы тока таким образом, чтобы после перехода от второго к третьему значению заданное значение силы тока принимало постоянное значение в течение определенного времени.
Присутствие этого горизонтального участка во время фазы неуправляемости позволяет избежать, чтобы заданное значение силы тока не приводило к еще большему падению тока, проходящего через индуктивный компонент.
Согласно отличительному признаку этого другого варианта осуществления, указанное постоянное значение равно первому значению.
Согласно еще одному варианту осуществления, создают входной ток каскада понижения напряжения, согласованный по фазе с входным напряжением каскада понижения напряжения.
Действительно, смещение фазы индуцирует реактивную мощность, проходящую через сеть, но не отбираемую для зарядки батареи. Поэтому следует минимизировать это смещение фазы и снизить реактивную мощность. Это смещение фазы связано, например, с использованием фильтра типа RLC, который приводит к смещению фазы между током и напряжением, отбираемыми из сети.
Предпочтительно входной ток каскада понижения напряжения регулируют, задавая в незамкнутом цикле циклический коэффициент разделения каскада понижения напряжения в зависимости от напряжения однофазной сети питания, от заданной мощности и от силы тока, проходящего через индуктивный компонент, для согласования фазы между входным током каскада понижения напряжения и входным напряжением каскада понижения напряжения и для автоматического согласования мощности, поступающей на батарею, с заданной мощностью.
Можно также регулировать силу тока, проходящего через батарею, по контрольной силе тока батареи, задавая в замкнутом цикле циклический коэффициент разделения каскада повышения напряжения в зависимости от напряжения на выходе каскада понижения напряжения, от напряжения батареи и от разности между заданным значением силы тока и силой тока, проходящего через индуктивный компонент.
Предпочтительно можно деактивировать интегрирующую часть корректора пропорционально-интегрального типа, если циклический коэффициент разделения равен, с учетом пороговых допусков, значениям 0 или 1.
Другие преимущества и отличительные признаки изобретения будут более очевидны из нижеследующего подробного описания не ограничительного варианта выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - устройство зарядки согласно варианту выполнения изобретения;
фиг. 2а и 2b - соответственно первый и второй варианты выполнения первого модуля контроля;
фиг. 3 - схема варианта выполнения второго модуля контроля;
фиг. 4 - графическое изображение тока, проходящего через катушку индуктивности;
фиг. 5-8 - графические изображения тока, проходящего через катушку индуктивности, в зависимости от заданного значения силы индуцируемого тока;
фиг. 9 - сравнение переменных системы зарядки в зависимости от заданного значения.
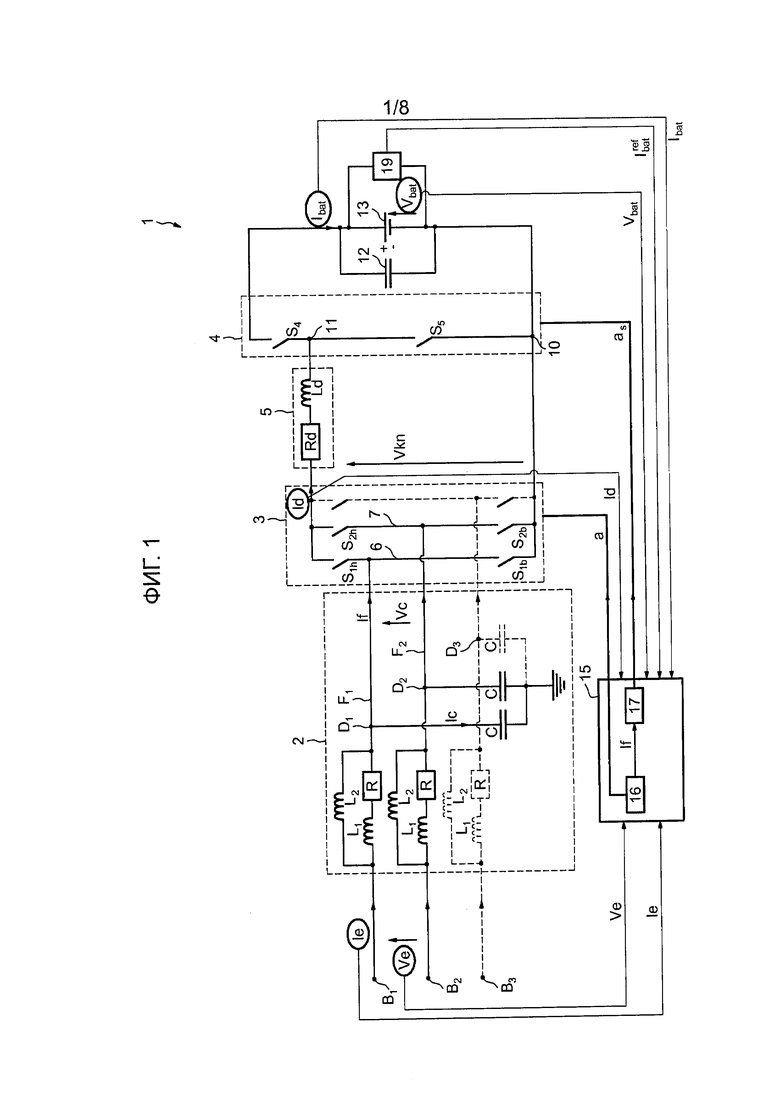
На фиг. 1 схематично показано устройство зарядки батареи автотранспортного средства на электрической тяге от однофазной сети электроснабжения, согласно варианту выполнения.
Устройство 1 зарядки содержит каскад 2 фильтрации, каскад 3 понижения напряжения, связанный с каскадом 2 фильтрации, и каскад 4 повышения напряжения, связанный с каскадом 3 понижения напряжения через электрическую машину 5.
Поскольку устройство 1 может быть подключено как к трехфазной, так и к однофазной сети электроснабжения, оно содержит три клеммы B1, В2, В3, связанные с входом каскада 2 фильтрации и выполненные с возможностью соединения с сетью электроснабжения. При однофазной зарядке только входы B1 и В2 соединены с однофазной сетью электроснабжения, выдающей входное напряжение Ve и входной ток Ie.
Каждая входная клемма B1, В2 и В3 связана с ветвью фильтрации каскада 2 фильтрации. Каждая ветвь фильтрации содержит две параллельные ветви, одна из которых содержит катушку индуктивности со значением L2, а другая содержит последовательно соединенные катушку индуктивности со значением L1 и резистор со значением R.
Эти две ветви фильтрации соединены, каждая, на выходе с емкостным конденсатором С в точке, соответственно называемой D1, D2, D3 для каждой из ветвей фильтрации. Совокупность резисторов R, катушек индуктивности L1 или L2 и конденсаторов С образует фильтр типа RLC на входе каскада 3 понижения напряжения.
При однофазной зарядке клемма В3 не подключена к сети электроснабжения. Поскольку ветвь фильтрации, связанную с клеммой В3, не используют, в дальнейшем описании она не рассматривается и на фигуре показана пунктирными линиями. Другие элементы электрической схемы, показанные пунктирными линиями, являются элементами, используемыми только в рамках подключения к трехфазной сети электроснабжения.
Каскад 3 понижения напряжения связан с каскадом 2 фильтрации через точки D1 и D2. При работе с однофазным электроснабжением каскад 3 понижения напряжения содержит две параллельные ветви 6 и 7, каждая из которых имеет два выключателя S1h и S1b или S2h и S2b, управляемые блоком 15 регулирования.
Каждый вход D1 или D2 каскада понижения напряжения связан соответственно ветвью F1 и F2 с точкой соединения, находящейся между двумя выключателями S1h и S1b или S2h и S2b одной ветви, соответственно 6 и 7.
Общие концы ветвей 6 и 7 образуют две выходных клеммы каскада 3 понижения напряжения. Одна из клемм соединена с клеммой «-» батареи 13, в также с первым входом 10 каскада 4 повышения напряжения. Другая из этих клемм соединена с первой клеммой электрической машины 5, другая клемма которой соединена со вторым входом 11 каскада 4 повышения напряжения.
Каскад 4 повышения напряжения содержит два выключателя S4 и S5, раздельно управляемые блоком 15 регулирования. Эти два выключателя S4 и S5 находятся на ветви, соединяющей первый вход 10 каскада 4 повышения напряжения и клемму «+» батареи 13. Второй вход 11 каскада 4 повышения напряжения, с которым соединена электрическая машина 5, подключен между двумя выключателями S4 и S5, при этом выключатель S4 подсоединен между вторым входом 11 и клеммой «+» батареи 13, а выключатель S5 подсоединен между первым входом 10 и вторым входом 11.
Электрическая машина 5, которую можно представить как резистор Rd, последовательно соединенный с катушкой индуктивности Ld, подключена между выходной клеммой каскада 3 понижения напряжения и вторым входом 11 каскада 4 повышения напряжения. Не выходя за рамки изобретения, можно заменить электрическую машину нерезистивной катушкой индуктивности или соединить последовательно с электрической машиной 5 дополнительную катушку индуктивности.
К клеммам батареи 13 подключен конденсатор 12, предназначенный для поддержания относительно стабильного напряжения на клеммах батареи 13, и также модуль 19 отслеживания зарядки батареи, выполненный с возможностью выдачи заданного значения Ibatref, выражающего, в зависимости от уровня зарядки батареи, оптимальную силу тока, который должен поступать через клемму «+» батареи. Модуль 19 отслеживания зарядки передает заданное значение Ibatref в блок 15 регулирования через соответствующее соединение.
Кроме того, средства измерения, интегрированные или не интегрированные в модуль 19, передают в блок 15 регулирования значение Ibat, выражающее измеренную силу тока, действительно проходящего в батарее, и значение Vbat, выражающее напряжение между клеммой «-» и клеммой «+» батареи 13.
Другие модули измерения силы тока позволяют измерять и передавать в блок 15 регулирования значение Id тока, проходящего через электрическую машину 5, значение Ie силы тока сети электроснабжения, поступающего в каскад 2 фильтрации, и значение Ve входного напряжения сети электроснабжения.
Блок 15 регулирования содержит первый модуль 16 контроля, позволяющий определять циклический коэффициент а разделения каскада 3 понижения напряжения, и второй модуль 17 контроля, позволяющий определять заданное значение циклического коэффициента as разделения каскада 4 повышения напряжения.
Для этого блок 15 регулирования содержит два управляющих модуля (не показаны), выполненные, в случае первого модуля, с возможностью задавания временного цикла размыкания и замыкания для каждого из выключателей каскада 3 понижения напряжения, чтобы получить циклический коэффициент а разделения каскада 3 понижения напряжения, и, в случае второго модуля, с возможностью задавания временного цикла размыкания и замыкания для каждого из выключателей S4 и S5 каскада 4 повышения напряжения, чтобы получить циклический коэффициент as.
Предпочтительно выключатели являются транзисторами, обеспечивающими быстрое переключение, например, транзисторами типа IGBT (Insulated Gate Bipolar Transistor).
Для оценки циклических коэффициентов а и as блок 15 регулирования получает на входе значения напряжения Ve сети электроснабжения, силы Id тока, проходящего через электрическую машину 5, напряжения Vbat, проходящего через батарею 13, силы Ibat тока, проходящего через батарею 13, и контрольное значение Ibatref силы тока батареи, выдаваемое модулем 19 отслеживания зарядки.
В зависимости от циклического коэффициента а блок 15 регулирования осуществляет управление состоянием каждого из выключателей S1h, S1b, S2h и S2b понижающего каскада 3. Точно так же, в зависимости от циклического коэффициента as блок 15 регулирования может задавать состояние выключателей S4 и/или S5 повышающего каскада 4.
Например, характеристические значения электрических элементов устройства 1 зарядки находятся в следующих диапазонах значений:
- конденсаторы фильтра 2 имеют емкость в несколько сот мкФ, например, от 100 до 500 мкФ каждый,.
- конденсатор 12, подключенный к клеммам батареи 13 для стабилизации напряжения на клеммах, имеет емкость порядка мФ, например, от 1 до 10 мФ,
- резисторы R цепи 2 фильтрации имеют сопротивление порядка Ома, например, от 1 до 10 Ом,
- резистор Rd ротора электрической машины Me имеет сопротивление порядка нескольких десятков мкОм, например, от 0,01 Ом до 0,1 Ом,
- катушки индуктивности L1, L2, Ld, соответствующие катушкам индуктивности каскада 2 фильтрации и обмотке электрической машины 5 имеют индуктивность порядка нескольких десятков мкГн, например, значения в пределах от 10 мкГн до 100 мкГн.
При помощи первого модуля 16 контроля и второго модуля 17 контроля блок регулирования вырабатывает заданные значения а и as циклического коэффициента разделения для каскада 3 понижения напряжения и каскада 4 повышения напряжения, что позволяет выполнять три задачи:
- контролировать амплитуду входного тока If каскада 3 понижения напряжения и согласовывать этот ток If по фазе с входным напряжением Ve (следствием этого контроля является получение входного тока If каскада 3 понижения напряжения, согласованного по фазе с входным напряжением), что соответствует автоматическому регулированию мощности, отбираемой из сети электроснабжения,
- получать измеренный ток Ibat, входящий через клемму «+» батареи 13, соответствующий потребностям питания батареи 13, причем эти потребности определяет модуль 19 отслеживания зарядки и выдает их в виде функции Ibatref в блок 15 регулирования,
- избегать аннулирования тока Id, проходящего через катушку Ld индуктивности электрической машины 5.
Поскольку падением напряжения на каскаде 2 фильтрации при диапазоне рабочей мощности можно пренебречь, то и нет необходимости описывать уравнения входного фильтра.
Предположим, что напряжение Vc на входе каскада 3 понижения напряжения равно входному напряжению Ve сети электроснабжения.
Выходное напряжение Vkn каскада 3 понижения напряжения равно a⋅Ve. Поскольку оно равно a⋅Ve, можно записать уравнение ветви, в которой находится электрическая машина, в следующем виде:

где s является переменной Лапласа,
а обозначает циклический коэффициент разделения каскада 3 понижения напряжения, as является циклическим коэффициентом разделения каскада 4 повышения напряжения.
Коэффициент а разделения каскада 3 понижения напряжения можно также записать как a=If/Id, где If является током, входящим в каскад 3 понижения напряжения, а циклический коэффициент as разделения каскада 4 повышения напряжения можно представить как as=Ibat/Id.
Уравнение (1) можно также записать следующим образом:

или:

В соответствии с уравнением 3 можно использовать силу If входящего тока каскада 3 понижения напряжения в качестве переменной управления для автоматического регулирования тока Id, проходящего через электрическую машину 5, по заданному значению Idref, которое вырабатывают таким образом, чтобы не допускать аннулирования тока в катушке Ld индуктивности.
Когда значение входного напряжения Ve приближается к нулю, система, даже при автоматическом регулировании, становится неуправляемой. Согласно уравнениям, во время этих фаз неуправляемости ток Id в катушке индуктивности Ld электрической машины 5 может только уменьшаться, как показано на фиг. 4.
Разделив значение силы If входящего тока каскада 3 понижения напряжения на значение силы Id измеренного тока, проходящего через электрическую машину 5, по определению получают значение циклического коэффициента а разделения каскада 3 понижения напряжения.
Входное напряжение Vc каскада 3 понижения напряжения, равное входному напряжению Ve сети электроснабжения, имеет форму Vc=Ve=Vmsin(ωt).
Управление осуществляют таким образом, чтобы ток If совпадал по фазе с входным напряжением. Входной ток Ie равен Ie=If+Ic, то есть Ie=Iffmsin(ωt)+C/2 Vmcos(ωt).
Таким образом, ток If отображает активную мощность, отбираемую из сети. Последнюю получают при помощи отношения Pactive=IfmVm/2, где Ifm=2Pactive/Vm.
Если входной ток Ie регулируют при помощи входного тока If каскада 3 понижения напряжения и если регулируют ток Id, проходящий через электрическую машину 5, при помощи входного тока If каскада 3 понижения напряжения, чтобы избежать аннулирования тока в катушке Ld электрической машины 5, то остается выполнить третью задачу регулирования, осуществляемую блоком 15 регулирования и касающуюся автоматического регулирования тока Ibat, входящего в батарею, по заданному значению Ibatref, выдаваемому модулем 19 отслеживания зарядки.
Для этого можно, например, задавать циклический коэффициент as разделения на каскад повышения напряжения таким образом, чтоб соблюдать отношение as=Ibatref/Id.
Отношение, выражающее динамику тока, проходящего через электрическую машину 5, и представленное уравнением (1), напрямую связывает циклический коэффициент as разделения каскада 4 повышения напряжения и ток Id, проходящий через электрическую машину 5.
Таким образом, можно напрямую управлять коэффициентом as на основании погрешности между контрольным значением Idref и измеренным значением Id тока, проходящего через электрическую машину 5.
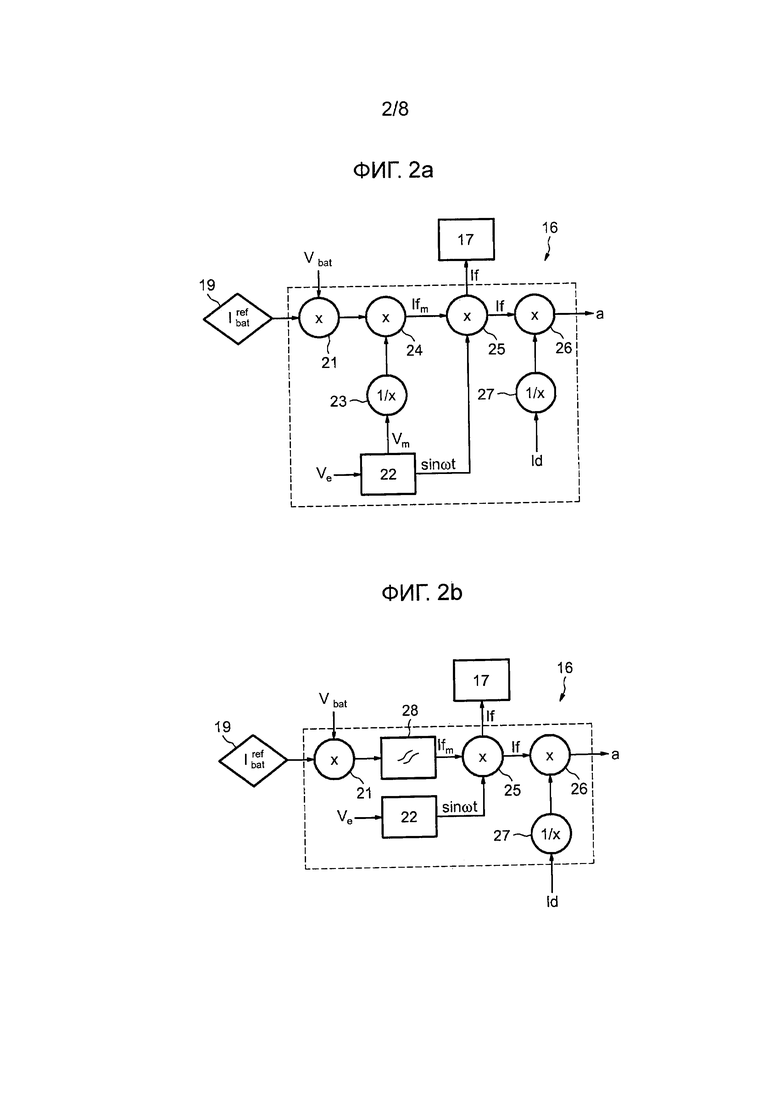
На фиг. 2а схематично представлен первый вариант выполнения первого модуля 16 контроля. Первый модуль контроля осуществляет регулирование в незамкнутом цикле входного тока If каскада 3 понижения напряжения. Регулирование входного тока If каскада 3 понижения напряжения осуществляют посредством вычисления циклического коэффициента а разделения каскада 3 понижения напряжения.
Циклический коэффициент а разделения каскада 3 понижения напряжения определяют в зависимости от заданной мощности Pbatref, определяемой на основании напряжения Vbat батареи и заданной силы тока Ibatref батареи, от входного напряжения Ve однофазной сети электроснабжения и от силы тока Id, проходящего через катушку индуктивности Ld.
Первый модуль 16 контроля получает на первом входе заданное значение силы тока Ibatref батареи, а также на втором входе напряжение Vbat батареи, измеренное на клеммах батареи. Заданное значение силы тока Ibatref и напряжение Vbat батареи поступают на вход первого умножителя 21, который выдает заданное значение мощности Pbatref.
На третьем входе модуль 16 контроля получает входное напряжение Ve сети электроснабжения. Модуль 16 содержит анализатор 22 сигнала, позволяющий выделить сигнал со стандартной амплитудой Vm, пропорциональный входному напряжению Ve однофазной сети электроснабжения. Сигнал с амплитудой Vm поступает на первый инвертор 23, который на выходе выдает обратное значение амплитуды Vm. Обратное значение этой амплитуды Vm поступает во второй умножитель 24, который принимает также на входе заданное значение мощности Pbatref.
На выходе второй умножитель 24 выдает амплитуду Ifm входного тока каскада 3 понижения напряжения в третий умножитель 25, который получает также на входе сигнал фазы sin(ωt) входного напряжения Ve однофазной сети электроснабжения.
Третий умножитель 25 выдает на выходе входной ток If каскада 3 понижения напряжения, с одной стороны, во второй модуль 17 контроля и, с другой стороны, в четвертый умножитель 26. На четвертом входе модуль 16 принимает значение Id силы тока, проходящего через катушку Ld электрической машины 5. Значение Id тока, проходящего через катушку Ld, поступает во второй инвертор 27, который выдает на выходе обратное значение Id силы тока, проходящего через катушку Ld, в четвертый умножитель 26.
Четвертый умножитель 26 производит вычисление If/Id и выдает на выходе значение циклического коэффициента а разделения каскада 3 понижения напряжения, позволяющее автоматически регулировать входной ток If каскада 3 понижения напряжения.
На фиг. 2b представлен второй вариант выполнения первого модуля 16 контроля.
В этом модуле 16 второй умножитель 24 заменен картографией 28, выдающей амплитуду Ifm входного тока If каскада 3 понижения напряжения в зависимости от амплитуды Vm входного напряжения Ve и от заданного значения мощности Pbatref.
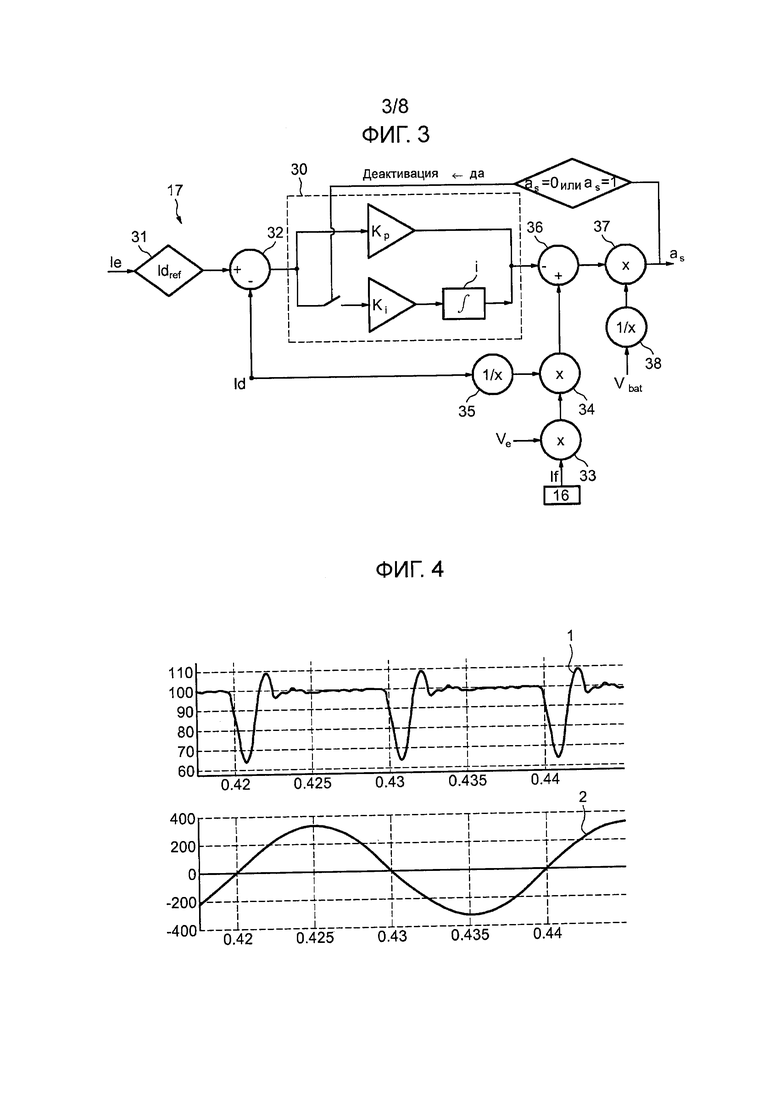
На фиг. 3 представлен вариант выполнения второго модуля 17 контроля.
В устройстве 1 зарядки регулированием тока Ibat, проходящего в батарее 13, управляет каскад 4 повышения напряжения. Действительно, ток Ibat батареи соответствует отношению Ibat=asId.
Таким образом, для автоматического регулирования тока Ibat в батарее по его контрольному значению достаточно задать as=Ibatref/Id.
Можно также добавить контур коррекции, если имеется значение измерения тока батареи. В этом случае получают:

где α является регулировочным параметром.
Второй модуль 17 контроля осуществляет регулирование в замкнутом цикле силы Id тока, проходящего через катушку Ld индуктивности электрической машины 5.
Второй модуль 17 контроля принимает на первом входе значение Ie силы входного тока сети электроснабжения. Это значение Ie силы тока поступает в модуль 31, определяющий заданное значение силы индуцируемого тока Idref. Второй модуль 17 контроля получает на втором входе значение Id силы тока, проходящего через катушку Ld электрической машины 5. Значение Id силы тока поступает на отрицательный вход первого вычитателя 32, который принимает на положительном входе заданное значение силы индуцируемого тока Idref.
Первый вычитатель 32 выдает на выходе разность между силой Id тока, проходящего через катушку индуктивности Ld, и заданным значением силы индуцируемого тока Idref в корректор 30 пропорционально-интегрального типа.
Пропорционально-интегральный корректор 30 содержит две параллельные ветви, первая из которых содержит модуль Kp пропорциональной коррекции, а вторая содержит модуль Ki интегральной коррекции и модуль i интегрирования.
Второй модуль 17 контроля получает на третьем входе значение If силы тока на входе каскада 3 понижения напряжения, выдаваемое первым модулем 16 контроля. Значение силы тока If поступает в первый умножитель 33, который принимает также на входе входное напряжение Ve однофазной сети, получаемое на четвертом входе второго модуля 17 контроля.
На выходе первый умножитель 33 выдает значение Pactive активной мощности. Это значение Pactive поступает на вход второго умножителя 34, который получает также на входе обратное значение тока Id, при этом предварительно значение тока Id получает первый инвертор 35.
Второй умножитель 34 производит вычисление Pactive/Id и выдает на выходе значение Vkn выходного напряжения каскада 3 понижения напряжения. Значение Vkn напряжения каскада 3 понижения напряжения поступает на положительный вход второго вычитателя 36, который принимает на отрицательном входе выходное значение от пропорционально-интегрального корректора 30.
При этом второй вычитатель 36 выдает на своем выходе сумму разности между силой Id тока, проходящего через катушку индуктивности Ld, и заданным значением силы индуцируемого тока Idref, скорректированным пропорционально-интегральным корректором 30, с выходным напряжением Vkn каскада 3 понижения напряжения на входе третьего умножителя 37. Третий умножитель 37 получает также на входе обратное значение напряжения Vbat батареи, при этом значение напряжения Vbat батареи было принято на пятом входе второго модуля 17 контроля и предварительно выдано во второй инвертор 38.
При этом третий умножитель 37 выдает на выходе заданное значение циклического коэффициента as разделения каскада 4 повышения напряжения.
Второй модуль 17 контроля содержит также контур обратной связи между выходом третьего умножителя 37 и входом ветви пропорционально-интегрального корректора 30, содержащей модуль Ki интегральной коррекции.
Если значение циклического коэффициента as разделения каскада 4 повышения напряжения равно 0 или 1 с учетом порогового допуска, производят деактивацию ветвей интегральной коррекции.
Этот контур обратной связи соответствует технологии предупреждения лавинного эффекта, применяемой для предупреждения неуправляемости устройства, когда входное напряжение Ve становится близким к нулю. Действительно, во время фаз неуправляемости управление является насыщенным, то есть циклические коэффициенты выключателей или транзисторов IGBT установлены на 1, и не может уменьшить отклонение. Чтобы избежать интегрирования этой постоянной погрешности, используют контур обратной связи. Таким образом, как только устройство становится управляемым, ток Id, проходящий через катушку Ld электрической машины 5, приводится к контрольному значению Idref.
Использование этого контура обратной связи позволяет также управлять системой, содержащей катушку Ld с очень низким значением индуктивности. Использование катушки низкой индуктивности позволяет уменьшить объем зарядного устройства.
Изобретение позволяет получить бортовое устройство зарядки для автотранспортного средства, выполненное с возможностью подключения к внешней однофазной сети электроснабжения, содержащее в своей схеме обмотку электрической машины транспортного средства и позволяющее регулировать каскад понижения напряжения и каскад повышения напряжения таким образом, чтобы сохранять лишь незначительное смещение фазы между током и напряжением, отбираемыми из однофазной сети электроснабжения.
На фиг. 4 показаны две системы координат, каждая из которых содержит горизонтальную ось, показывающую время в секундах, и вертикальную ось, показывающую соответственно ток в амперах и напряжение в вольтах. Представленные кривые 1 и 2 отображают соответственно изменение тока Id в амперах, проходящего через индуктивный компонент, при заданном значении индуцируемого тока постоянного значения, например, Idref=100 А, и изменение напряжения Ve в зависимости от фаз неуправляемости.
На этой фиг. 4 видно, что, когда абсолютная величина напряжения Ve близка к нулевому значению, имеет место фаза неуправляемости, в ходе которой ток Id резко падает. В случае периодического однофазного входного напряжения фазы неуправляемости являются периодическими с частотой, в два раза превышающей частоту входного напряжения Ve.
Следовательно, можно прогнозировать и/или обнаруживать фазы неуправляемости. Например, можно определить порог для абсолютной величины входного напряжения Ve, ниже которого обнаруживают фазу неуправляемости. Согласно другому примеру, после обнаружения первой фазы неуправляемости можно прогнозировать следующую фазу, поскольку они появляются периодически.
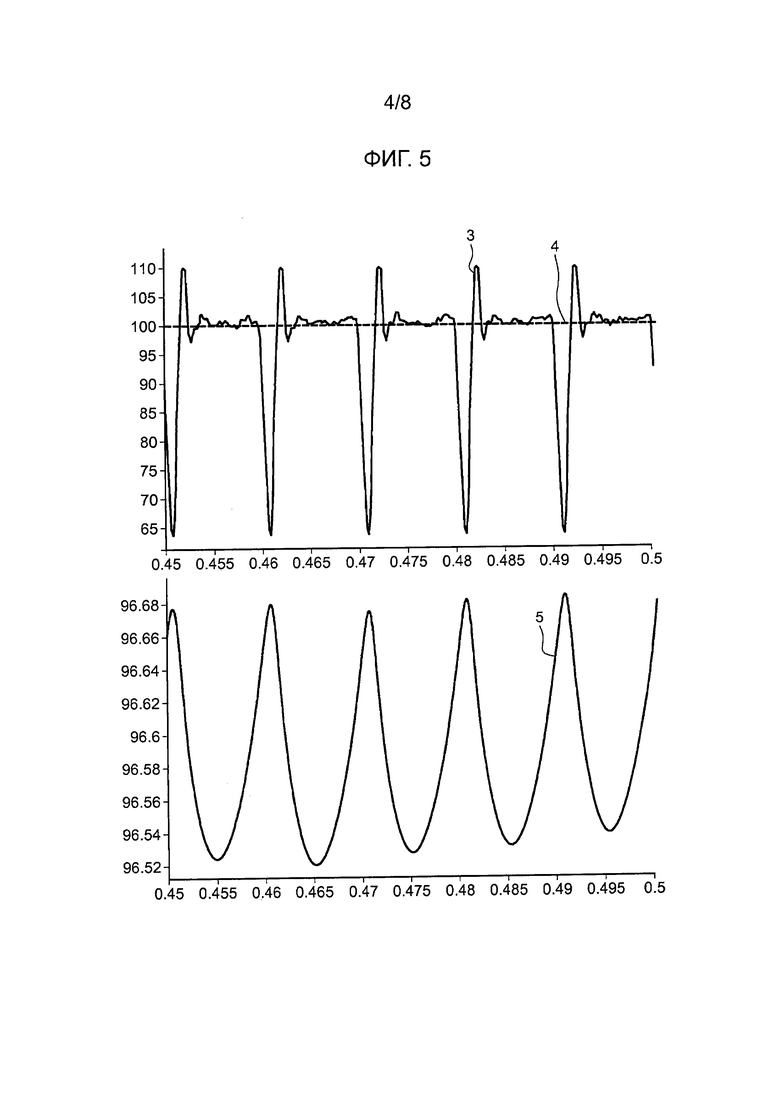
На фиг. 5 показаны две системы координат, каждая из которых содержит горизонтальную ось, показывающую время в секундах, и вертикальную ось, показывающую ток в амперах. Представленные кривые 3 и 4 соответственно отображают детальное изменение тока Id в амперах, проходящего через индуктивный компонент Ld, и постоянное заданное значение Idref=100 А, выдаваемое модулем 31, показанным на фиг. 3. Кривая 5 показывает изменение значения тока Id после скользящей средней. При заданном значении Idref=100 А ток Id имеет среднее значение вокруг 96,6 А в пределах от 96,52 до 96,68 А.
В этом случае при помощи повышающего каскада 4 (фиг. 1) предусмотрено передавать ток Id в батарею в виде тока Ibat. Однако при описанной выше системе зарядки, чтобы зарядить батарею 300 В с мощностью 7 кВт, ток Ibat должен быть равен 25 А. В классической европейской сети на 230 вольт по эффективному значению, отбираемый при такой мощности ток сети будет равен 30,5 А по эффективному значению, то есть 43 А по амплитуде. Следовательно, среднее значение Id (96,6 А) является, с одной стороны, большим, и, с другой стороны, намного отличается от значения тока Ibat, отбираемого батареей, а также от отбираемого тока сети (43 А по амплитуде). Это большое и отличающееся значение тока Ibat и тока сети предполагает энергетические потери, как будет показано ниже. Одним из решений могло бы быть снижение заданного значения Idref, выдаваемого модулем 31, показанным на фиг. 3, для уменьшения тока Id.
На самом деле это решение невыполнимо, поскольку в накопительной катушке индуктивности между каскадом понижения напряжения и каскадом повышения напряжения должен всегда циркулировать не равный нулю ток, то есть ток Id должен всегда превышать 0 А, в том числе во время фаз неуправляемости. При представленной выше системе зарядки и при амплитуде входного тока Ie порядка 43 А, заданное значение Idref, предполагающее минимальное значение силы тока Id в 55 А (это минимальное значение достигается, например, во время фазы управляемости), обеспечивает предел безопасности только в 12 А.
Показанное на фиг. 5 использование постоянного заданного значения Idref=100 А обеспечивает достаточный предел безопасности порядка 20 А (это предельное значение получают посредством вычитания из минимального значения во время фаз неуправляемости: 63.79 А, значения амплитуды входного тока 43 А, 63.79 А - 43 А = 20.79 А), но с недостаточным энергетическим КПД по причине величины тока Id и его разности со значением тока Ibat, отбираемого батареей.
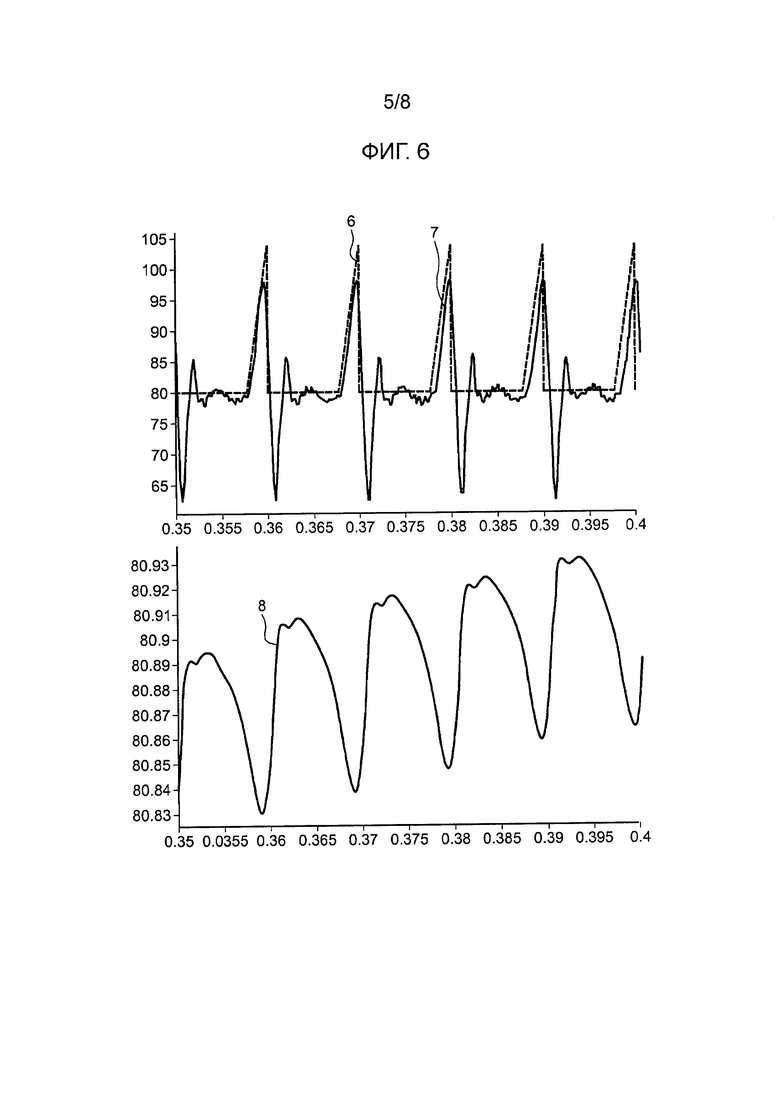
Решение этой проблемы представлено на фиг. 6. На фиг. 6 показаны две системы координат, каждая из которых содержит горизонтальную ось, показывающую время в секундах, и вертикальную ось, показывающую ток в амперах. Представленные кривые 6 и 7 соответственно отображают новое заданное значение Idref и детальное изменение тока Id в амперах, проходящего через индуктивный компонент, в зависимости от этого нового заданного значения.
На фиг. 6 видно, что новое заданное значение принимает два значения: первое значение, равное среднему порогу порядка 80 А, и второе значение, равное верхнему порогу порядка 105 А. Заданное значение быстро повышается от первого до второго значения, затем, достигнув второго значения, моментально понижается до первого значения. Время повышения от первого до второго значения равно, например, π/4 значения, выраженного в радианах, при этом точкой отсчета является электрический угол ωt напряжения Ve=Vmsin(ωt). Соответствующее время повышения, выраженное в периодах, равно 1/8 периода, то есть в случае частоты 50 Гц: (π/4)/(2.π.50)=2,5 мс.
На кривой 7 видно, что при заданном значении Idref, показанном на фиг. 6, ток Id принимает минимальное значение порядка 62.71 А во время фаз неуправляемости. Это значение почти идентично значению, получаемому при зафиксированном постоянном заданном значении Idref=100 А. Это связано с тем, что заданное значение принимает второе значение (105 А) непосредственно перед фазой неуправляемости.
Кроме того, показанная кривая 8 отображает изменение значения тока Id (кривая 7) после скользящей средней. Как видно, при этом новом заданном значении Idref (кривая 6) ток Id имеет среднее значение вокруг 80,9 А в пределах от 80,83 до 80,93 А.
Таким образом, с новым заданным значением получают ток Id, среднее значение которого значительно снизилось, но который имеет идентичное минимальное значение. На фиг. 6 представлено решение, представляющее собой новое заданное значение Idref, принимающее два значения, благодаря которому средняя сила тока Id уменьшилась, обеспечивая при этом минимальную силу тока Id, соответствующую идентичному пределу безопасности. Получают лучший энергетический КПД, сохраняя при этом достаточный предел безопасности. В частности, средний ток понижается на 16% (80,9 А по сравнению с 96,6 А), что позволяет, с одной стороны, уменьшить джоулевы потери и механические потери в электрической машине 5 (фиг. 1) и, с другой стороны, производить переключение каскада 4 повышения напряжения (фиг. 1) в соответствии с циклическим коэффициентом as, который обеспечивает более высокий КПД, так как сила тока Id оказывается ближе к Ibat, но при этом его превышает.
Разумеется, при помощи других регулировок, представляющих собой, например, заданное значение, для которого значение верхнего порога увеличивают, можно тоже получить повышение энергетического КПД или повышение предела безопасности без увеличения энергетического КПД.
На фиг. 6 видно, что кривая 7 показывает большое превышение заданного значения во время возвращения к управляемости. Решение этой проблемы представлено на следующей фиг. 7.
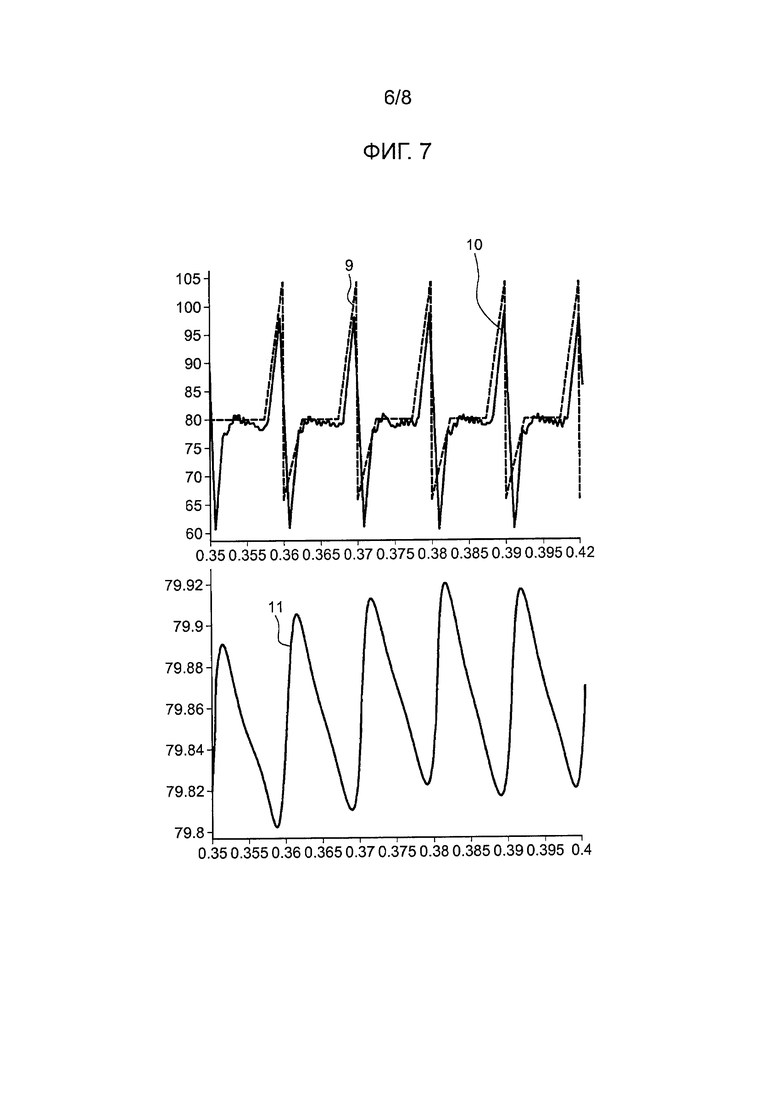
Как и на фиг. 6, на фиг. 7 показаны две системы координат, каждая из которых содержит горизонтальную ось, показывающую время в секундах, и вертикальную ось, показывающую ток в амперах. Представленные кривые 9 и 10 соответственно отображают новое заданное значение Idref и детальное изменение тока Id в амперах, проходящего через индуктивный компонент, в зависимости от этого нового заданного значения. Показанная кривая 11 отображает изменение значения тока Id (кривая 10) после скользящей средней.
Как и заданное значение, показанное кривой 6, заданное значение на кривой 9 принимает первое значение, равное среднему порогу порядка 80 А, и второе значение, равное верхнему порогу порядка 105 А. Заданное значение на кривой 9 отличается от заданного значения на кривой 6 третьим значением, называемым нижним порогом и принимаемым заданным значением во время фаз неуправляемости. Например, нижний порог имеет значение 66 А. Приняв это третье значение, заданное значение на кривой 9 повышается до первого значения среднего порога. Например, время повышения от третьего до первого значения равно π/4 значения, выраженного в радианах, при этом точкой отсчета является электрический угол cot напряжения Ve=Vmsin(ωt). Соответствующее время повышения, выраженное в периодах, равно 1/8 периода, то есть в случае частоты 50 Гц: (π/4)/(2.π.50)=2,5 мс.
При этом новом заданном значении на фиг. 10 видно, что ток Id еще немного превышает заданное значение, но уже на величину, намного меньшую, чем на кривой 7. Это связано с медленным увеличением тока Id от третьего значения до первого значения, начиная от конца фазы неуправляемости, причем это медленное увеличение связано с заданным значением Idref, которое тоже характеризуется этим медленным повышением.
В дальнейшем ток Id, показанный на кривой 10, достигает максимального значения, аналогичного току на кривой 7, затем минимального значения, немного меньшего минимального значения на кривой 7. В частности, ток Id на кривой 10 достигает минимального значения 60,89 А и среднего значения (показанного на кривой 11) вокруг 79,86 А в пределах от 79,83 до 79,92 А. Таким образом, заданное значение на кривой 9 позволяет уменьшить среднее значение и избежать слишком резкого повышения, поскольку это слишком резкое повышение влечет за собой гармоники на токе и превышение заданного значения.
Таким образом, при заданном значении на кривой 9 полученное минимальное значение 60,89 А является недостаточным, так как оно обеспечивает лишь предел безопасности 60.89 А - 43 А = 17.89 А.
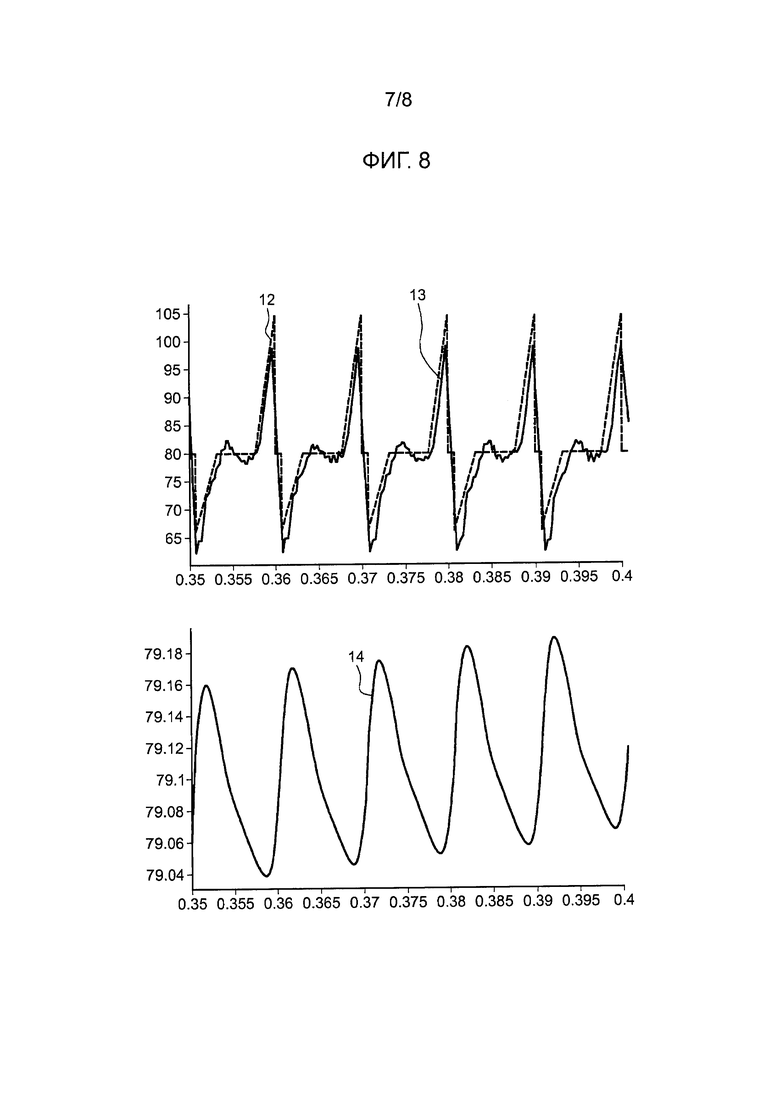
На фиг. 8 предложено заданное значение, позволяющее решить эту проблему. Как и на фиг. 7, на фиг. 8 показаны две системы координат, каждая из которых содержит горизонтальную ось, показывающую время в секундах, и вертикальную ось, показывающую ток в амперах. Представленные кривые 12 и 13 соответственно отображают новое заданное значение Idref и детальное изменение тока Id в амперах, проходящего через индуктивный компонент, в зависимости от этого нового заданного значения. Показанная кривая 14 отображает изменение значения тока Id (кривая 13) после скользящей средней.
Как и заданное значение, показанное кривой 9, заданное значение на кривой 12 принимает первое значение, равное среднему порогу порядка 80 А, второе значение, равное верхнему порогу порядка 105 А, и третье значение, равное нижнему порогу порядка 66 А. Заданное значение на кривой 12 отличается от заданного значения на кривой 9 горизонтальным участком, которому соответствует заданное значение во время фаз неуправляемости.
Этот горизонтальный участок соответствует постоянному значению, принимаемому заданной силой индукционного тока в течение определенного времени при переходе от второго к третьему значению. Например, времени, в течение которого принимаемое постоянное значение равно 0,07 л значения, выраженного в радианах, при этом точкой отсчета является электрический угол cot напряжения Ve=Vmsin(ωt). Соответствующее время, выраженное в периодах, равно 0,035 периода, то есть в случае частоты 50 Гц: (0,07.π)/(2.π.50)=0,7 мс. Например, принимаемое постоянное значение является первым значением, то есть средним порогом, который имеет значение порядка 80 А.
При этом новом заданном значении на кривой 13 видно, что ток Id принимает минимальное значение (во время фаз неуправляемости), намного превышающее минимальное значение на кривой 10. Это связано с присутствием горизонтального участка в заданном значении, который, хотя и находится во время фазы неуправляемости, позволяет избежать того, что заданное значение приводит к еще большему падению тока, проходящего через индуктивный компонент.
Кроме этого пункта, форма тока Id, показанная на кривой 13, подобна форме на кривой 10. Таким образом, ток Id на кривой 13 достигает минимального значения 62,51 А и среднего значения (показанного на кривой 14) вокруг 79,1 А в пределах от 79,03 до 79,19 А. Таким образом, заданное значение на кривой 12 позволяет немного увеличить минимальное значение тока Id, сохраняя при этом аналогичное и даже меньшее среднее значение (-0,7 А).
Таким образом, заданное значение, показанное на кривой 12, позволяет получить предел безопасности: 62,51-43=19,51 А, который является достаточным и одновременно обеспечивает понижение среднего значения тока Id примерно на 18% (79,1 А по сравнению с 96,6 А).
На фиг. 9 показано сравнение переменных системы зарядки в зависимости от заданного значения. На фиг. 9 представлены три системы координат, каждая из которых содержит горизонтальную ось, отображающую время в секундах, и вертикальную ось, отображающую соответственно ток в амперах, напряжение в вольтах и ток в амперах.
Представленные кривые 15 и 16 показывают соответственно заданную силу индукционного тока Idref в соответствии с кривой 12 и заданную силу индукционного тока в соответствии с постоянным значением Idref=100. Представленная кривая 17 показывает изменение напряжения Ve в зависимости от фаз неуправляемости, уже показанное на фиг. 4. Наконец, кривые 18 и 19 показывают соответственно ток Id для заданного значения, представленного кривой 16, и для заданного значения, представленного кривой 15.
На этой фиг. 9 видно, что изменение заданных значений Idref кривых 15 и 16 можно разделить на четыре этапа.
На первом этапе заданное значение Idref кривой 15 принимает постоянное значение, равное первому значению. Таким образом, ток Id кривой 18 можно поддерживать в более низком значении, чем при регулировании с заданным значением, представленным кривой 16. Это выражается циклическим коэффициентом as, который соответствует передаче более значительной части тока Id, проходящего через индуктивный компонент (называемый также током нейтрали), в батарею, чем при заданном значении, показанном на кривой 16. Действительно, среднее значение тока оказывается ближе к току Ibat и в то же время его превышает. Таким образом, получают увеличение КПД.
На втором этапе заданное значение Idref на кривой 15 повышается до второго значения. Ток Id кривой 18 следует заданному значению и, таким образом, увеличивается, упреждая будущую потерю управляемости (показанную кривой 17, которая приближается к нулевому значению). Таким образом, падение тока Id начнется с более высокого значения, что позволяет достичь также более высокого значения в конце падения.
Третий этап происходит во время фазы неуправляемости, в ходе которой заданное значение падает со второго значения до третьего значения, при этом указанное падение включает в себя горизонтальный участок, в течение которого заданное значение сохраняет постоянное значение (например, первое значение).
На четвертом этапе заданное значение на кривой 15 медленно повышается от третьего до первого значения.
Все решения, представленные на фиг. 6-9, состоят в выработке заданного значения Idref таким образом, чтобы оно следовало не постоянной кривой. Их осуществляют при помощи модуля 31, который вырабатывает указанное заданное значение в зависимости от тока Ie.

Изобретение относится к области электротехники и может быть использовано в автотранспортных средствах на электрической тяге. Техническим результатом является повышение энергетического КПД зарядных систем. Способ управления зарядкой батареи (13), в частности батареи автотранспортного средства от однофазной сети, включает фильтрацию входного напряжения (Ve); подачу на батарею электрической мощности от сети через каскад (3) понижения напряжения и каскад (4) повышения напряжения, связанные между собой через индуктивный компонент (Ld); и контроль силы тока (Id), проходящего через указанный индуктивный компонент, в зависимости от заданного значения (Idref) силы тока, при этом указанная сила тока (Id) не является непрерывно управляемой. Согласно способу, вырабатывают заданное значение силы тока так, чтобы указанное заданное значение силы тока имело по меньшей мере одно первое значение и по меньшей мере одно второе значение, превышающее первое значение, причем заданное значение силы тока имеет второе значение до начала фазы, во время которой сила тока является неуправляемой. 8 з.п. ф-лы, 10 ил.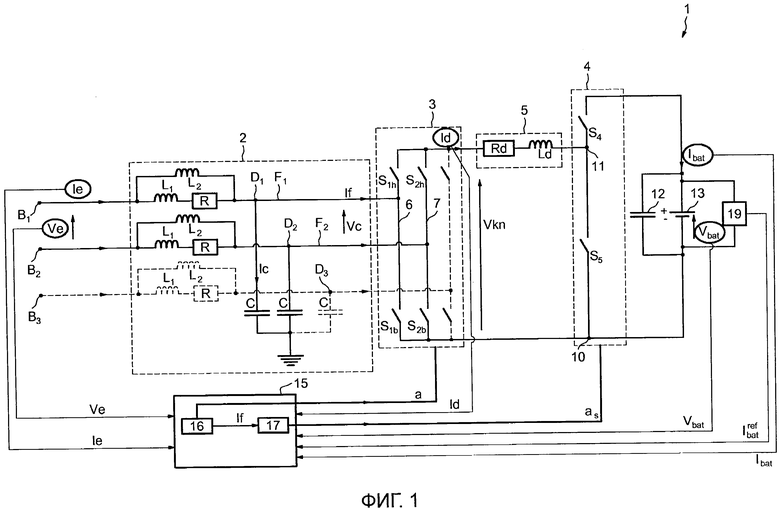
1. Способ управления зарядкой батареи (13), в частности батареи автотранспортного средства от однофазной сети, включающий:
- фильтрацию входного напряжения (Ve),
- подачу на батарею электрической мощности от сети через каскад (3) понижения напряжения и каскад (4) повышения напряжения, связанные между собой через индуктивный компонент (Ld); и
- контроль силы тока (Id), проходящего через указанный индуктивный компонент, в зависимости от заданного значения (Idref) силы тока, при этом указанная сила тока (Id) не является непрерывно управляемой,
отличающийся тем, что вырабатывают заданное значение (Idref) силы тока таким образом, чтобы указанное заданное значение силы тока имело по меньшей мере одно первое значение и по меньшей мере одно второе значение, превышающее первое значение, при этом заданное значение силы тока имеет второе значение до начала фазы, во время которой сила тока является неуправляемой.
2. Способ по п. 1, в котором вырабатывают заданное значение (Idref) силы тока таким образом, чтобы указанное заданное значение имело третье значение, меньшее первых двух значений, при этом заданное значение переходит от второго к третьему значению в ходе фазы, во время которой сила тока является неуправляемой.
3. Способ по п. 2, в котором вырабатывают заданное значение (Idref) силы тока таким образом, чтобы после принятия третьего значения заданное значение (Idref) перешло от третьего к первому значению в соответствии с возрастающей аффинной функцией.
4. Способ по п. 2 или 3, в котором вырабатывают заданное значение (Idref) силы тока таким образом, чтобы во время перехода от второго к третьему значению заданное значение (Idref) силы тока принимало постоянное значение в течение определенного времени.
5. Способ по п. 4, в котором указанное постоянное значение равно первому значению.
6. Способ по п. 1, в котором создают входной ток (If) каскада (3) понижения напряжения, согласованный по фазе с входным напряжением (Ve) каскада (3) понижения напряжения.
7. Способ по п. 6, в котором входной ток (If) каскада (3) понижения напряжения регулируют, задавая в незамкнутом цикле циклический коэффициент (a) разделения
каскада (3) понижения напряжения в зависимости от напряжения (Ve) однофазной сети питания, от заданной мощности (Pbatref) и от силы тока (Id), проходящего через индуктивный компонент (Ld), для согласования по фазе входного тока каскада понижения напряжения с входным напряжением каскада понижения напряжения и для автоматического согласования мощности (Pbat), поступающей на батарею, с заданной мощностью (Pbatref).
8. Способ по п. 6, в котором регулируют силу тока (Ibat), проходящего через батарею (13), по контрольной силе тока (Pbatref) батареи, задавая в замкнутом цикле циклический коэффициент (aS) разделения каскада (4) повышения напряжения в зависимости от напряжения (Vkn) на выходе каскада (3) понижения напряжения, от напряжения (Vbat) батареи (13) и от разности между заданным значением (Idref) силы тока и силой тока (Id), проходящего через индуктивный компонент (Ld).
9. Способ по п. 8, в котором деактивируют интегрирующую часть корректора пропорционально-интегрального типа, если циклический коэффициент (aS) разделения равен, с учетом пороговых допусков, значениям 0 или 1.
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДКОЙ И ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2354026C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ ПОДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2401496C1 |
| FR 2964510 A1, 09.032012 | |||
| JP 09322412 A, 12.12.1997 | |||
| US 759870 B2, 06.10.2009 | |||
| СПОСОБ ПРОИЗВОДСТВА МЕДОВОГО ВИНА | 2008 |
|
RU2365620C1 |
| WO 1998044613 A1, 08.10.1998. | |||

