Настоящее изобретение относится к технической области управления электрическими двигателями и, в частности, касается управления электрическими двигателями типа синхронных двигателей с постоянными магнитами.
Синхронный двигатель с постоянными магнитами содержит ротор с одним или несколькими постоянными магнитами, а также статор с обмотками, в которых проходят токи, смещенные по фазы относительно друг друга, создавая в двигателе вращающееся магнитное поле, приводящее во вращение ротор. Частота вращения ротора равна частоте токов, проходящих в статоре, поэтому двигатель или электрическую машину называют «синхронной».
Чтобы контролировать крутящий момент такого двигателя, система управления регулирует амплитуду токов, циркулирующих в статоре, прикладывая к каждой из фаз статора соответствующее синусоидальное напряжение. Для упрощения алгоритма управления крутящим моментом в системе, как правило, применяют преобразование Парка для перевода токов и напряжений статора во вращающуюся систему координат, связанную с ротором. Таким образом, в системе координат Парка определяют статорные напряжения, прикладываемые к статору таким образом, чтобы соответствующие статорные токи создавали необходимый крутящий момент. Эти статорные напряжения в системе координат Парка называются сигналами управления. При помощи обратного преобразования Парка система управления определяет затем синусоидальные напряжения, которые необходимо приложить к различным фазам статора для получения необходимого крутящего момента, называемого заданным крутящим моментом.
Однако использование таких двигателей, например, тяговых двигателей в электрическом или гибридном транспортном средстве, требует надежного управления крутящим моментом, которое быстро реагирует в зависимости от потребностей водителя в крутящем моменте и которое ограничивает крутящий момент областью значений, совместимой с напряжением тяговой батареи такого транспортного средства. Если крутящий момент двигателя выходит за пределы этой области значений, система управления двигателя становится нестабильной, чего следует избегать.
Для регулирования токов статора такого двигателя обычно используют так называемые пропорционально-интегральные корректоры или ПИ-корректоры. Однако в этих корректорах возникает проблема нестабильности, в частности, если необходимо реализовать скоростную систему. Для решения этой проблемы параметры этих корректоров рассчитывают таким образом, чтобы обеспечить пределы стабильности, указанные в технических требованиях, которые должен соблюдать двигатель. Кроме того, поскольку собственные параметры двигателей с постоянными магнитами, такие как внутреннее сопротивление или индуктивность, отличаются от одного двигателя к другому, то, как известно, эти пределы стабильности расширяют, то есть еще больше снижают характеристики корректора, чтобы можно было использовать одинаковый корректор на всех двигателях одной серии транспортных средств.
Другой пример корректора без применения пропорционально-интегрального корректора раскрыт в документе ЕР 0702451, в котором предложено решение регулирования скорости синхронной машины с постоянными магнитами в ответ на изменения нагрузки двигателя. Такое решение требует калибровки коэффициента усиления корректора в зависимости от режима машины или требует компенсации членов статической связи, которые необходимо очень точно измерять.
Изобретение призвано устранить по меньшей мере часть недостатков известных решений и предложить способ управления и систему управления силовой установкой, которые обеспечивают стабильный и надежный контроль крутящего момента двигателя с постоянными магнитами независимо от его режима и которые используют постоянные одинаковые коэффициенты усиления для двигателей одной серии, производимых на конвейере.
В связи с этим объектом изобретения является способ управления силовой установкой, содержащей электрический двигатель, оснащенный ротором с постоянными магнитами и статором, при этом указанный способ включает в себя этап регулирования токов статора, чтобы они достигали заданных значений токов, при помощи сигналов управления электрическим двигателем, при этом указанные регулируемые токи и указанные сигналы управления выражены во вращающейся системе координат, содержащей множество осей, при этом указанный способ отличается тем, что указанный этап регулирования содержит для каждой из осей указанного множества осей этап применения для регулируемого тока на указанной оси линейного оператора, который различается в зависимости от значения указанного регулируемого тока по отношению к его заданному значению, при этом указанный этап применения указанного линейного оператора позволяет получить значение сигнала управления на указанной оси.
Благодаря изобретению, для получения сигналов управления двигателем используют линейные операторы, позволяющие следовать заданным значениям тока без добавления интегральной составляющей, которая часто является причиной нестабильности, когда необходимо реализовать быстро реагирующий способ управления. Таким образом, способ управления в соответствии с изобретением позволяет регулировать крутящий момент двигателя даже при изменяющейся скорости.
Согласно предпочтительному признаку способа управления в соответствии с изобретением, указанный линейный оператор содержит:
- первый член, минимизирующий или максимизирующий, в зависимости от значения указанного регулируемого тока относительно его заданного значения, составляющую нулевого порядка оценочного сигнала управления на указанной оси в зависимости от указанных регулируемых токов, от скорости указанного ротора и от предельных значений диапазона значений, оценивающих характеристики указанной силовой установки,
- и второй член, пропорциональный указанному регулируемому току, на указанной оси, использующий коэффициент сходимости.
Таким образом, используют известные диапазоны изменения характеристик силовой установки, обеспечивая надежность способа управления в соответствии с изобретением. Использование этих известных диапазонов изменения, а также формулирование линейного оператора в виде двух частей позволяют добиться быстрого схождения регулируемых токов с их заданными значениями.
Согласно другому предпочтительному признаку, указанные диапазоны значений включают в себя, по меньшей мере, две оценки, выбранные из группы, в которую входят:
- оценка эквивалентного сопротивления статора,
- оценка индуктивности силовой установки на одной из указанных осей,
- оценка потока, создаваемого постоянными магнитами ротора.
Использование этих оценок позволяет отказаться от измерения для каждой силовой установки, в которой применяют способ в соответствии с изобретением, ее собственных характеристик, таких как ее внутреннее сопротивление, ее индуктивность или поток, создаваемый постоянными магнитами ротора. Таким образом, изобретение можно применять без каких-либо изменений для целого ряда серийно выпускаемых силовых установок.
Силовой установкой является, например, силовая установка электрического или гибридного транспортного средства, характеризующаяся инвариантностью ее собственных характеристик при вращении на четверть оборота.
Согласно еще одному предпочтительному признаку, способ в соответствии с изобретением включает в себя этап сглаживания сигнала управления на одной из указанных осей, как только разность по абсолютной величине между регулируемым током на этой оси и его заданным значением становится меньше заранее определенного порога.
Этот этап сглаживания обеспечивает облегченное применение способа в соответствии с изобретением при помощи стандартных приводов.
Объектом изобретения является также система управления силовой установкой, содержащей электрический двигатель, оснащенный ротором с постоянными магнитами и статором, при этом указанная система содержит средства регулирования токов статора таким образом, чтобы они достигали заданных значений тока, при помощи сигналов управления электрическим двигателем, при этом указанные регулируемые токи и указанные сигналы управления выражены во вращающейся системе координат, содержащей множество осей, при этом система в соответствии с изобретением отличается тем, что указанные средства регулирования содержат для каждой из осей указанного множества осей средства применения для регулируемого тока на указанной оси линейного оператора, который различается в зависимости от значения указанного регулируемого тока по отношению к его заданному значению, при этом указанные средства применения указанного линейного оператора выдают значение сигнала управления на указанной оси.
Согласно предпочтительному признаку системы в соответствии с изобретением, указанный линейный оператор содержит:
- первый член, минимизирующий или максимизирующий, в зависимости от значения указанного регулируемого тока относительно его заданного значения, составляющую нулевого порядка оценочного сигнала управления на указанной оси в зависимости от указанных регулируемых токов, от скорости указанного ротора и от предельных значений диапазона значений, оценивающих характеристики указанной силовой установки,
- и второй член, пропорциональный указанному регулируемому току, на указанной оси, использующий коэффициент сходимости.
Согласно другому предпочтительному признаку системы в соответствии с изобретением, указанные диапазоны значений включают в себя, по меньшей мере, две оценки, выбранные из группы, в которую входят:
- оценка эквивалентного сопротивления статора,
- оценка индуктивности силовой установки на одной из указанных осей,
- оценка потока, создаваемого постоянными магнитами ротора.
Согласно еще одному предпочтительному признаку системы в соответствии с изобретением, указанная система содержит средства сглаживания сигнала управления на одной из указанных осей, как только разность по абсолютной величине между регулируемым током на этой оси и его заданным значением становится меньше заранее определенного порога.
Объектом изобретения является также компьютерная программа, содержащая команды для применения способа управления в соответствии с изобретением, когда указанную программу исполняет один или несколько процессоров.
Система управления в соответствии с изобретением, а также компьютерная программа в соответствии с изобретением имеют те же преимущества, что и способ управления в соответствии с изобретением.
Другие признаки и преимущества будут более очевидны из нижеследующего описания предпочтительного варианта выполнения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - двигатель с постоянными магнитами;
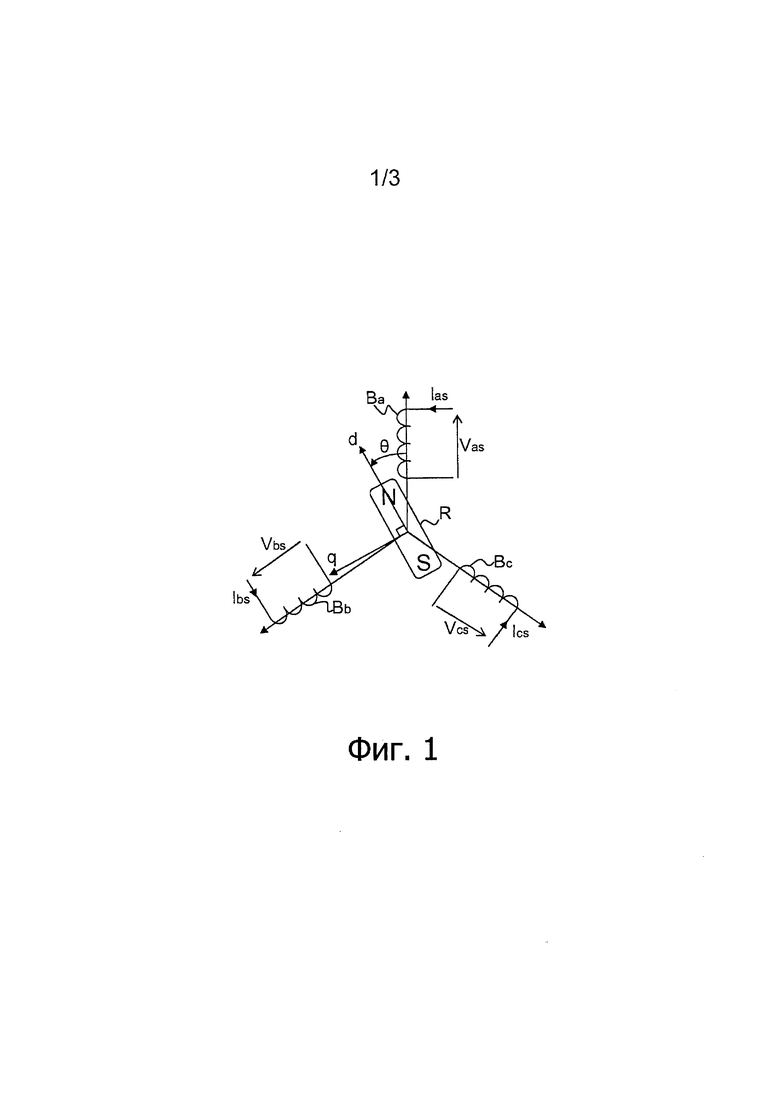
фиг. 2 - этапы способа управления силовой установкой в соответствии с изобретением согласно этому варианту выполнения изобретения;
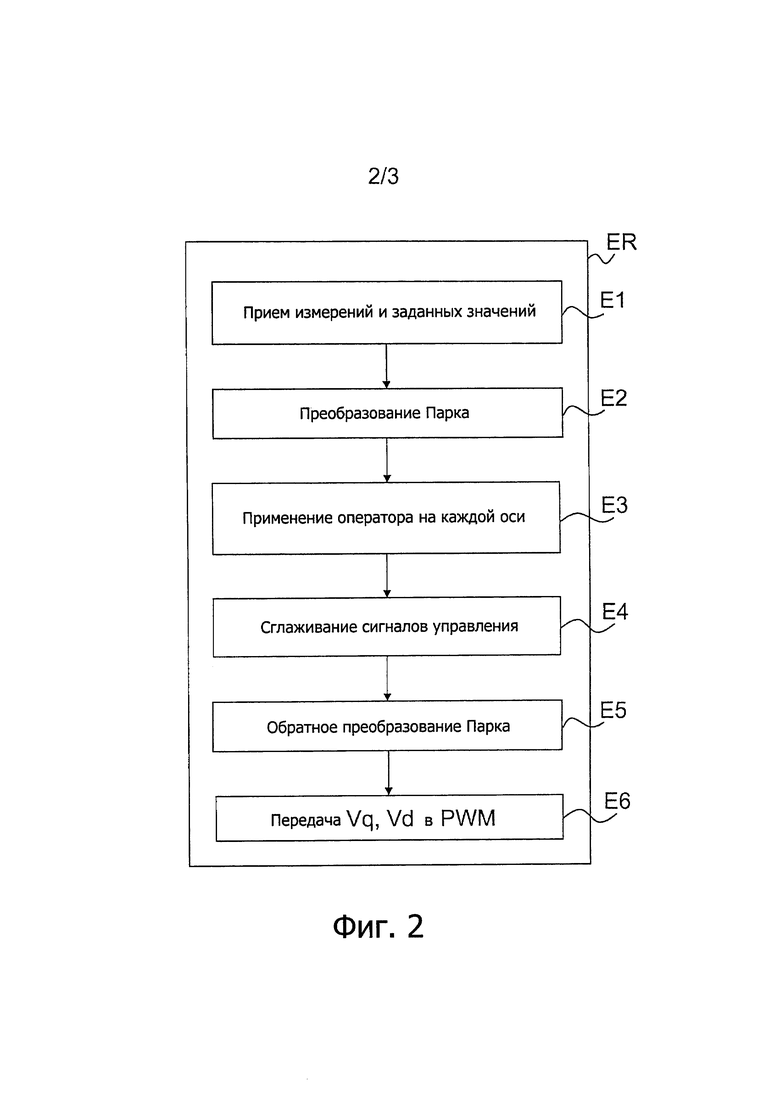
фиг. 3 - система управления силовой установкой в соответствии с изобретением согласно этому варианту выполнения изобретения.
Согласно предпочтительному варианту выполнения изобретения, способ управления в соответствии с изобретением применяют для управления крутящим моментом двигателя с постоянными магнитами силовой установки электрического транспортного средства. Такой двигатель схематично представлен на фиг. 1, на которой для упрощения показана только одна пара полюсов. В действительности двигатель может содержать несколько пар полюсов, например, пять пар полюсов.
Он содержит статор с тремя обмотками Ва, Вb и Вс, окружающими ротор R, причем через эти три обмотки проходят соответственно синусоидальные статорные токи Ias, Ibs и Ics, смещенные по фазе относительно друг друга на 2π/3 радиан. Соответствующими синусоидальными статорными напряжениями, прикладываемыми к каждой обмотке для получения этих токов, являются соответственно Vas, Vbs и Vcs.
Для упрощения управления этим двигателем эти статорные токи и напряжения выражены в системе координат, вращающейся вместе с ротором, с полярными осями d и квадратурными осями q. Полярная ось d совпадает с направлением от южного полюса S к северному полюсу N образующего статор магнита и имеет угол поворота θ с обмоткой Ва. Производная угла θ, поделенная на число пар полюсов ротора R, дает скорость вращения ωr магнитного поля двигателя с постоянными магнитами в рад/с.
На фиг. 2 способ управления в соответствии с изобретением представлен в виде алгоритма, включающего в себя этапы Е1-Е6 более общего этапа ER регулирования статорных токов, чтобы они соответствовали заданному крутящему моменту, который должен выдавать двигатель с постоянными магнитами.
Способ осуществляют при помощи одного или нескольких вычислительных устройств силовой установки.
Этап 1 является этапом приема устройством управления DC, показанным на фиг. 3, где представлена система управления в соответствии с изобретением, измерений статорных токов двигателя и скорости вращения ωr магнитного поля двигателя, поступающих от средств измерения ММ. Этап Е1 включает в себя также прием устройством управления DC заданных статорных токов, получаемых из таблиц и соответствующих заданному крутящему моменту.
Следующим этапом Е2 является преобразование Парка измеренных статорных токов и заданных статорных токов, полученных на этапе Е1, при помощи средств MCR изменения системы координат. В варианте можно использовать другие преобразования, отличные от преобразования Парка-Конкордиа (часто называемого преобразованием Парка), например, преобразование Парка-Кларка.
Средства MCR изменения системы координат выдают в устройство управления DC следующие значения:
- Id, соответствующее значению измеренного статорного тока на оси d системы координат Парка в амперах,
- Iq, соответствующее значению измеренного статорного тока на оси q системы координат Парка в амперах,
- Idref, соответствующее заданному значению статорного тока на оси d системы координат Парка в амперах,
- и Iqref, соответствующее заданному значению статорного тока на оси q системы координат Парка в амперах.
Следует отметить, что для упрощения фиг. 3, на ней показано, что устройство управления DC получает непосредственно значения токов, выраженных в системе координат Парка.
Следующим этапом Е3 является применение для измеренных и предназначенных для регулирования статорных токов Id и Iq линейного оператора на каждой из осей системы координат Парка, который различается в зависимости от значения регулируемого тока на этой оси по отношению к его заданному значению. Этот этап Е3 основан на представленной ниже теории.
Сигналы управления двигателем выражаются в виде:


где:
- Vd и Vq - статорные напряжения соответственно на осях d и q системы координат Парка, в вольтах,
- Rs - эквивалентное сопротивление статора двигателя, в омах,
- Ld u Lq - индуктивность на каждой оси d и q системы координат Парка, в генри,
- Фf - поток, создаваемый магнитами ротора, в веберах,
- оператор 
Ставится цель достичь заданного крутящего момента, несмотря на наличие связи между осью d и осью q (при нулевом режиме связи нет, см. Уравнение 1) и на неизвестность точных значений потока Фf, значений индуктивности Ld и Lq и сопротивления Rs. Крутящий момент, выдаваемый двигателем, выражается в виде:

где:
- Сеm - электромагнитный момент, создаваемый двигателем,
- p - число пар полюсов ротора,
- Фd и Фq - создаваемые потоки на осях d и q системы координат Парка. Более конкретно:

Как правило, двигатели с постоянными магнитами имеют идеальную симметрию между осями d и q, то есть можно записать:

и, следовательно, комбинируя (2) и (3), крутящий момент, выдаваемый двигателем, можно записать:

Таким образом, чтобы контролировать крутящий момент, максимально ограничивая при этом потери, необходимо иметь статорный ток Id на оси d, максимально близкий к нулю. Для получения заданного крутящего момента необходимо получить статорный ток Iq на оси q и нулевой статорный ток Id на оси d, чтобы получить самую слабую амплитуду токов для этого крутящего момента и, следовательно, обеспечить минимум потерь в железе.
Кроме того, в устройстве управления DC имеется таблица TAB, содержащая возможные диапазоны изменений или диапазоны значений для каждого параметра Rs, Фf и Ls:

при этом каждое из минимальных или максимальных значений в этих интервалах учитывает изменения токов и возможные разбросы, связанные с серийным выпуском двигателя с постоянными магнитами, которым необходимо управлять при помощи заявленного способа. В варианте, таблица TAB содержит только один или два диапазона значений, соответствующих одному или двум параметрам, выбранным среди Rs, Фf и Ls, а также оценочное значение, например, среднее значение, для каждого параметра, не имеющего диапазона значений.
Вернемся к описанию этапа Е3. На этом этапе Е3 средства сравнения МСОМР устройства управления DC сначала сравнивают измеренные статорные токи Id и Iq с их заданными значениями Idref и Iqref. В зависимости от знака разности между каждым из этих регулируемых токов и его заданным значением, получаемого от средств сравнения МСОМР, средство применения МАРР применяет для каждого из этих токов линейный оператор, что позволяет получить два возможных значения статорных напряжений на каждой из осей d и q в зависимости от этого знака. Таким образом:
- Если Id≥Idref, к току Id применяют линейный оператор OP1D и получают статорное напряжение:

где min(x) является минимальным оператором переменной х, и λd является положительным коэффициентом, который служит коэффициентом сходимости. Действительно, чем меньше этот коэффициент, тем больше ток Id медленно стремится к своему заданному значению Idref.
Член min(RsId-ωrpLsIq) минимизирует составляющую нулевого порядка сигнала управления Vd, выбирая для сопротивления Rs минимальное значение Rs min из его диапазона значений, если ток Id является положительным, или его максимальное значение Rs max, если ток Id является отрицательным, и для индуктивности Ls - максимальное значение Ls max, если ток Iq является положительным, или его минимальное значение Ls min, если ток Iq является отрицательным.
- Если Id<Idref, для тока Id применяют линейный оператор OP2D и получают статорное напряжение:

где mах(х) является максимальным оператором переменной х, и член mах(RsId-ωrpLsIq) максимизирует составляющую нулевого порядка сигнала управления Vd, выбирая для Rs и Ls соответствующие пределы из соответствующих диапазонов значений аналогично случаю, когда Id≥Idref.
- Аналогично, если Iq≥Iqref, для тока Iq применяют линейный оператор OP1Q и получают статорное напряжение:

где λq является положительным коэффициентом, который служит коэффициентом сходимости. Действительно, чем меньше этот коэффициент, тем больше ток Iq медленно стремится к своему заданному значению Iqref.
Член min(RsIq+ωrpLsId+ωrФf) минимизирует составляющую нулевого порядка сигнала управления Vq, выбирая для Rs, Ls и Фf соответствующие пределы из соответствующих диапазонов значений, как для предыдущих операторов.
Наконец, если Iq<Iqref, для тока Iq применяют линейный оператор OP2Q и получают статорное напряжение:

Член max(RsIq+ωrpLsId+ωrрФf) максимизирует составляющую нулевого порядка сигнала управления Vq, выбирая для Rs, Ls и Фf соответствующие пределы из соответствующих диапазонов значений, как для предыдущих операторов.
Применение этих линейных операторов к измеренным статорным токам Id и Iq на этом этапе Е3 обеспечивает схождение этих токов к их соответствующим заданным значениям. Действительно уравнение (Уравнение 1) в комбинации с уравнениями, определяющими статорные напряжения 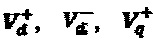 и
и  позволяет получить положительный знак производной тока Id, если Id<Idref, и отрицательный знак, если Id≥Idref, а также получить положительный знак производной тока Iq, если Iq<Iqref, и отрицательный знак, если Iq≥Iqref.
позволяет получить положительный знак производной тока Id, если Id<Idref, и отрицательный знак, если Id≥Idref, а также получить положительный знак производной тока Iq, если Iq<Iqref, и отрицательный знак, если Iq≥Iqref.
Следующий этап Е4 представляет собой сглаживание полученного на этапе Е3 статорного напряжения Vd, переходящего между  и
и  которое происходит, как только разность по абсолютной величие между током Id и его заданным значением Idref становится меньше заранее определенного порога εd, и сглаживание полученного на этапе Е3 статорного напряжения Vq, переходящего между
которое происходит, как только разность по абсолютной величие между током Id и его заданным значением Idref становится меньше заранее определенного порога εd, и сглаживание полученного на этапе Е3 статорного напряжения Vq, переходящего между  и
и  которое происходит, как только разность по абсолютной величие между током Iq и его заданным значением Iqref становится меньше заранее определенного порога εq.
которое происходит, как только разность по абсолютной величие между током Iq и его заданным значением Iqref становится меньше заранее определенного порога εq.
Таким образом, в конце этапа Е4 сигналы управления Vd и Vq равны:


Этот этап Е4 сглаживания посредством линейном интерполяции осуществляют при помощи средств MLIS. Этот этап является необходимым, когда статорные токи достаточно близки к своим соответствующим заданным значениям, чтобы эти токи не колебались вокруг своих заданных значений на частоте вычислительного устройства, реализующего способ управления в соответствии с изобретением.
Параметры λd, λq, εd и εq определяют в результате этапа калибровки, предваряющего применение способа управления в соответствии с изобретением, с учетом технических требований и таким образом, чтобы обеспечить надежность способа в соответствии с изобретением.
На следующем этапе Е5 определяют сигналы управления Vd и Vq в трехфазной системе при помощи средств MCR изменения системы координат, которые осуществляют на этих сигналах обратное преобразование Парка.
Наконец, этап Е6 предусматривает передачу устройством управления DC сигналов управления, выраженных в трехфазной системе, в инвертор PWM, который исполняет эти сигналы и передает их в двигатель с постоянными магнитами для получения необходимого крутящего момента.
Следует отметить, что для упрощения фиг. 3 на ней показано, что инвертор PWM принимает непосредственно сигналы управления, выраженные в системе координат Парка.
Таким образом, способ управления в соответствии с изобретением обеспечивает надлежащее изменение тока без использования интегрального члена, который может расходиться в случае большой погрешности на каком-либо параметре. Разумеется, для обеспечения работы привода необходимо оценивать диапазон изменения параметров.
Преимуществом этой стратегии регулирования является постоянная возможность изменения токов в направлении заданного значения, пока реальные параметры двигателя остаются в выбранном диапазоне. За счет этого обеспечивают стабильность более надежно, чем при помощи классических регуляторов, которые не учитывают разброса параметров. Кроме того, регулирование является более скоростным, так как оно всегда учитывает наихудшие случаи. Теперь можно отказаться от необходимости оценивать средние параметры, а просто определять их границы, что является более простым способом.
Необходимо отметить, что в этом варианте выполнения изобретения двигатель имеет симметрию между осями d и q, что упрощает выражение сигналов управления машиной, однако специалист может легко применить вариант выполнения для случая, когда двигатель является асимметричным между осями d и q. Точно так же, в варианте выполнения изобретения двигатель с постоянными магнитами является несинхронным.
Использование: в области электротехники для управления силовой установкой, содержащей электрический двигатель, оснащенный ротором с постоянными магнитами и статором. Технический результат – повышение надежности и стабильности контроля крутящего момента двигателя. Способ включает в себя этап регулирования (ER) токов статора, таким образом, чтобы они достигали своих заданных значений, при помощи сигналов управления (Vd, Vq) электрическим двигателем, при этом указанные регулируемые токи и указанные сигналы управления (Vd, Vq) выражены во вращающейся системе координат, содержащей множество осей (d, q), отличающийся тем, что указанный этап регулирования (ER) содержит для каждой из осей указанного множества осей этап применения (Е3) для регулируемого тока на этой оси линейного оператора, который различается в зависимости от значения указанного регулируемого тока по отношению к его заданному значению, при этом результатом применения линейного оператора является сигнал управления (Vd, Vq) на этой оси. 2 н. и 7 з.п. ф-лы, 3 ил.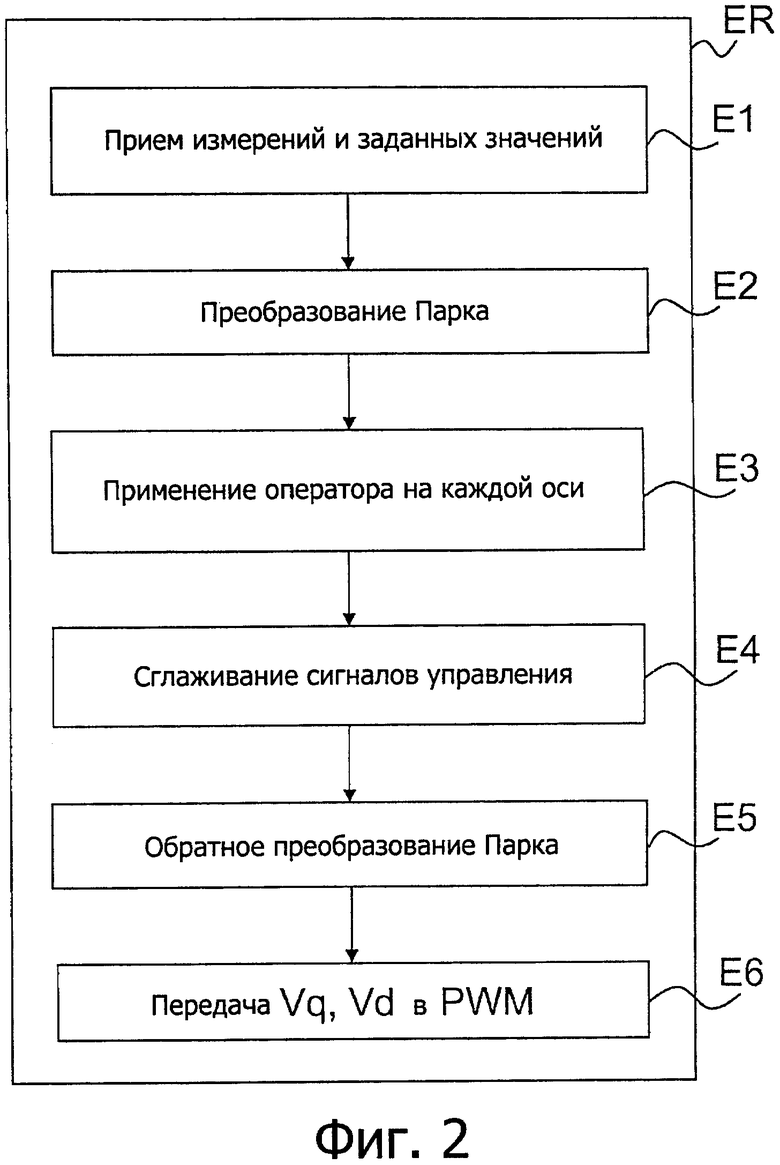
1. Способ управления силовой установкой, содержащей электрический двигатель, оснащенный ротором (R) с постоянными магнитами и статором, включающий этап регулирования (ER) токов (Id, Iq) статора, таким образом, чтобы они достигали заданных значений (Idref, Iqref) токов, при помощи сигналов управления (Vd, Vq) электрическим двигателем, при этом указанные регулируемые токи (Id, Iq) и указанные сигналы управления (Vd, Vq) выражены во вращающейся системе координат, содержащей множество осей (d, q),
отличающийся тем, что указанный этап регулирования (ER) содержит для каждой из осей (d, q) указанного множества осей этап применения (Е3) для регулируемого тока (Id, Iq) на указанной оси линейного оператора (OP1D, OP2D, OP1Q, OP2Q), который различается в зависимости от значения указанного регулируемого тока (Id, Iq) по отношению к его заданному значению (Idref, Iqref), при этом указанный этап применения указанного линейного оператора позволяет получить значение сигнала управления (Vd, Vq) на указанной оси.
2. Способ управления по п. 1, отличающийся тем, что указанный линейный оператор (OP1D, OP2D, OP1Q, OP2Q) содержит:
первый член, минимизирующий или максимизирующий, в зависимости от значения указанного регулируемого тока (Id, Iq) относительно его заданного значения (Idref, Iqref), составляющую нулевого порядка оценочного сигнала управления на указанной оси в зависимости от указанных регулируемых токов (Id, Iq), от скорости (ωr) указанного ротора и от предельных значений (Rsmin, Rsmax, Lsmin, Lsmax) диапазона значений, оценивающих характеристики указанной силовой установки,
и второй член, пропорциональный указанному регулируемому току (Id, Iq) на указанной оси (d, q), использующий коэффициент сходимости (λd, λq).
3. Способ управления по п. 2, отличающийся тем, что указанные диапазоны значений включают в себя по меньшей мере две оценки, выбранные из группы, в которую входят:
оценка эквивалентного сопротивления (Rs) статора,
оценка индуктивности (Ls) силовой установки на одной из указанных осей (d, q),
оценка потока (Фf), создаваемого постоянными магнитами ротора (R).
4. Способ управления по п. 1, отличающийся тем, что включает в себя этап (Е4) сглаживания сигнала управления (Vd, Vq) на одной из указанных осей (d, q), как только разность по абсолютной величине между регулируемым током (Id, Iq) на этой оси и его заданным значением (Idref, Iqref) становится меньше заранее определенного порога (εd, εq).
5. Способ управления по п. 1, отличающийся тем, что силовая установка является силовой установкой электрического или гибридного транспортного средства, характеризующейся инвариантностью своих внутренних характеристик при повороте на четверть оборота.
6. Система управления силовой установкой, содержащей электрический двигатель, оснащенный ротором (R) с постоянными магнитами и статором, при этом указанная система содержит средства регулирования токов (Id, Iq) статора таким образом, чтобы они достигали заданных значений (Idref, Iqref) тока, при помощи сигналов управления (Vd, Vq) электрическим двигателем, при этом указанные регулируемые токи (Id, Iq) и указанные сигналы управления (Vd, Vq) выражены во вращающейся системе координат, содержащей множество осей (d, q),
отличающаяся тем, что указанные средства регулирования содержат для каждой из осей (d, q) указанного множества осей средства применения (МАРР) для регулируемого тока (Id, Iq) на указанной оси линейного оператора (OP1D, OP2D, OP1Q, OP2Q), который различается в зависимости от значения указанного регулируемого тока (Id, Iq) по отношению к его заданному значению (Idref, Iqref), при этом указанные средства применения указанного линейного оператора выдают значение сигнала управления (Vd, Vq) на указанной оси.
7. Система управления силовой установкой по п. 6, отличающаяся тем, что указанный линейный оператор (OP1D, OP2D, OP1Q, OP2Q) содержит:
первый член, минимизирующий или максимизирующий, в зависимости от значения указанного регулируемого тока (Id, Iq) относительно его заданного значения (Idref, Iqref), составляющую нулевого порядка оценочного сигнала (Vd, Vq) управления на указанной оси в зависимости от указанных регулируемых токов (Id, Iq), от скорости (ωr) указанного ротора и от предельных значений (Rsmin, Rsmax, Lsmin, Lsmax, Фfmin, Фfmax) диапазона значений, оценивающих характеристики указанной силовой установки,
и второй член, пропорциональный указанному регулируемому току (Id, Iq) на указанной оси (d, q), использующий коэффициент сходимости (λd, λq).
8. Система управления силовой установкой по п. 7, отличающаяся тем, что указанные диапазоны значений включают в себя по меньшей мере две оценки, выбранные из группы, в которую входят:
оценка эквивалентного сопротивления (Rs) статора,
оценка индуктивности (Ls) силовой установки на одной из указанных осей (d, q),
оценка потока (Фf), создаваемого постоянными магнитами ротора (R).
9. Система управления силовой установкой по п.8, отличающаяся тем, что дополнительно содержит средства сглаживания (MLIS) сигнала управления (Vd, Vq) на одной из указанных осей (d, q), как только разность по абсолютной величине между регулируемым током (Id, Iq) на этой оси и его заданным значением (Idref, Iqref) становится меньше заранее определенного порога (εd, εq).
| JP2012120297A, 21.06.2012 | |||
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯ С СИНХРОНИЗАЦИЕЙ НА ПОСТОЯННОМ МАГНИТЕ | 2006 |
|
RU2397601C1 |
| JP 2004072856A1, 04.03.2004 | |||
| Якорный клюз | 1983 |
|
SU1100191A1 |

