Изобретение относится к измерительной технике, к пеленгаторам, и предназначается для определения пеленга и дальности до источников сигналов электромагнитного излучения (ЭМИ) и инфразвука искусственного и естественного происхождения (например, молниевых разрядов) и может быть использовано в метеорологии, в службе наблюдения за грозовой деятельностью, в морском транспорте и авиации.
Оценка местоположения или пеленга и дальности до источника сигналов при установке одного устройства на однопозиционном пункте наблюдения возможна с помощью способов, анализирующих соотношение параметров ЭМИ (амплитуд сигналов на приемниках ЭМИ с дипольными диаграммами направленности, взаимно перпендикулярными в горизонтальной плоскости) и изменение параметров принимаемого сигнала ЭМИ (длительность переднего фронта, длительность пика, отношение амплитуд частотных составляющих и др.) в зависимости от расстояния, пройденного сигналом. Для уменьшения погрешности оценки дальности устанавливают два устройства на расстоянии друг от друга (измерительная база) и применяют триангуляционный метод определения дальности. Способ заключается в том, что из двух пунктов наблюдения, расстояние между которыми известно, определяют углы прихода ЭМИ относительно линии, соединяющей пункты наблюдения, и решают геометрическую задачу нахождения сторон треугольника по известной стороне и двум измеренным углам [1]. Однако при малых углах относительно линии, соединяющей пункты наблюдения, применение способа дает большую погрешность [2].
Большинство регистрируемых явлений (грозовые разряды и др.) сопровождается сигналами, распространяющимися с низкой скоростью (например, инфразвук), но пеленгация с использованием этих сигналов не дает лучших результатов из-за зависимости скорости распространения этих сигналов от состояния среды распространения, т.е. из-за незнания точного значения скорости распространения в данный момент в данном месте, а также из-за мешающих сигналов других источников, возникающих за время прохождения инфразвука.
Однако использование обоих видов сигналов (например, электромагнитного излучения и инфразвука) на двухпозиционном пункте наблюдения дает новое качество, так как позволяет одновременно с пеленгом определить значение скорости распространения инфразвука в данный момент и, соответственно, более точно определить дальность до источника сигнала при известном расстоянии между точками регистрации. С другой стороны, использование разности времени прихода инфразвука на точки регистрации позволяет уменьшить размеры измерительной базы до однопозиционной за счет более низкой скорости распространения инфразвука по сравнению с ЭМИ.
Аналогично могут быть использованы акустические, сейсмические и ультразвуковые волны, сопровождающие регистрируемое явление.
Наиболее близким техническим решением к предлагаемому является способ, раскрытый в статье [3] (комбинированная система грозоопределения, состоящая из инфразвукового комплекса и электрической антенны), где пеленг и дальность до источника сигнала определяются после события по результатам дальнейшей обработки оператором записанных сигналов. Для определения азимута используются разности времени прихода инфразвуковых сигналов на не менее чем на три микробарометра, разнесенные друг от друга более чем на 90 метров (трехпозиционная система регистрации), а для определения дальности до источника сигнала используется разность времени прихода сигналов на электростатический флюксметр и инфразвуковой микрофон (или микробарометры).
При появлении двух или более инфразвуковых сигналов от аналогичных событий на рассмотренном пункте наблюдения во время прохождения инфразвуком расстояния от источника сигналов до микробарометра определить, какому источнику принадлежат сигналы, практически невозможно в рамках указанного способа.
Недостатками прототипа являются большая погрешность использования его на однопозиционном пункте наблюдения или на средстве передвижения, а также малая помехоустойчивость при наличии мешающих сигналов, приходящих во время прохождения инфразвуком расстояния от источника сигнала до пункта наблюдения.
Техническим результатом, обеспечиваемым заявляемым изобретением, является уменьшение погрешности использования его на однопозиционном пункте наблюдения или на средстве передвижения и увеличение помехоустойчивости при наличии мешающих сигналов, приходящих во время прохождения инфразвуком расстояния от источника сигнала до пункта наблюдения.
Технический результат достигается тем, что в способе определения пеленга и дальности до источника сигналов, заключающемся в том, что регистрируют время прихода электромагнитного излучения (ЭМИ) на однопозиционный пункт наблюдения с двумя точками регистрации инфразвука, а также время прихода инфразвука на две точки регистрации и определяют для каждой точки регистрации разность времени прихода ЭМИ и инфразвука, дополнительно, до прихода инфразвука на две точки регистрации, регистрируют магнитные компоненты сигнала ЭМИ двумя взаимно перпендикулярными в горизонтальной плоскости магнитными антеннами, ориентированными максимумами диаграмм направленности, соответственно, на Север-Юг и Запад-Восток, определяют по соотношению сигналов магнитных антенн азимут и определяют приближенную дальность до источника сигналов по изменению спектра сигнала ЭМИ в зависимости от пройденного ЭМИ расстояния, для чего определяют суммарный спектр сигналов двух магнитных антенн, определяют верхнюю и нижнюю частоты спектра и амплитуды сигналов на этих частотах, определяют отношение верхней частоты к нижней частоте спектра и отношение амплитуды нижней частоты к амплитуде верхней частоты спектра, по полученным отношениям, нижней частоте спектра, скорости света и азимуту определяют приближенные дальность до источника электромагнитного излучения и его местоположение, определяют по приближенному местоположению для каждой точки регистрации угол прихода сигнала между направлением на источник сигнала и прямой, соединяющей точки регистрации, определяют приближенное расстояние до источника сигнала и по заданной скорости инфразвука определяют ожидаемый интервал времени прихода инфразвука для каждой точки регистрации, с учетом погрешности заданной скорости инфразвука и определения приближенной дальности, и прекращают анализ сигналов до наступления ожидаемых интервалов времени прихода инфразвука, а в течение ожидаемых интервалов времени после прихода инфразвука и определения разности времени прихода ЭМИ и инфразвука для каждой точки регистрации, по углам прихода сигналов, известному расстоянию между точками регистрации и разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации уточняют скорость инфразвука во время прохождения сигналов, по разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации и уточненной скорости инфразвука во время прохождения сигналов уточняют значение дальности до источника сигналов, а по азимуту и уточненному значению дальности уточняют местоположение источника сигналов.
Способ иллюстрируется схемой, приведенной на чертеже.
Из схемы следует:
D=Δt1*V*cosγ+Δt2*V*cosβ;


где a, b - расстояния до источника сигналов,
γ, β - углы между направлением на источник сигналов и линией, соединяющей обе точки регистрации (точку 1 и точку 2),
V - скорость инфразвука,
Δt1 - разность времени между приходом ЭМИ и приходом инфразвука в точку 1,
Δt2 - разность времени между приходом ЭМИ и приходом инфразвука в точку 2,
D - известное расстояние между точками регистрации (база).
На практике достаточно определить направление на источник сигнала из любой одной точки регистрации на пункте наблюдения, определить угол между направлением на источник сигнала и базой и приближенную дальность от точки регистрации до источника сигнала по изменению параметров принимаемого сигнала ЭМИ и построить треугольник направлений с последующим уточнением дальности после прихода инфразвука.
Такой способ работоспособен и при малых углах, и при нулевых углах, когда источник сигнала расположен на линии, проходящей через точки регистрации.
Предлагаемый способ реализуется следующим образом.
Принимают сигналы ЭМИ на однопозиционном пункте наблюдения с двумя точками регистрации и размещенным на каждой точке микробарометром, а на одной из двух точек регистрации (например, на первой точке) с размещенными двумя взаимно перпендикулярными в горизонтальной плоскости магнитными антеннами, ориентированными максимумами диаграммы направленности, соответственно, на Север-Юг (ось X) и на Восток-Запад (ось Y), подключенными через усилители и аналого-цифровые преобразователи к вычислителю.
В случае превышения сигналом от любой из магнитных антенн заданного уровня начинают цикл обработки сигналов и отсчет времени задержки инфразвука для каждой из двух точек регистрации.
Определяют направление на источник сигнала, вычисляя отношение амплитуд сигналов двух взаимно перпендикулярных в горизонтальной плоскости антенн (X и Y) [4],
tgα=Ay/Ax,
где α - азимут;
Аx, Аy - амплитуды сигналов магнитных антенн, ориентированных максимумами диаграмм направленности, соответственно, на Север-Юг (ось X) и на Восток-Запад (ось Y).
Полученное направление соответствует углу γ прихода сигнала для первой точки регистрации.
Определяют суммарный спектр сигналов двух магнитных антенн, верхнюю и нижнюю частоты спектра и амплитуды сигнала на верхней и нижней частотах спектра.
Вычисляют отношение верхней частоты к нижней частоте спектра и отношение амплитуды нижней частоты к амплитуде верхней частоты спектра, по полученным отношениям, нижней частоте спектра и скорости света определяют приближенную дальность до источника электромагнитного излучения.
Приближенная оценка дальности проводится по формуле, учитывающей изменение спектра сигнала ЭМИ в зависимости от пройденного расстояния [5]:
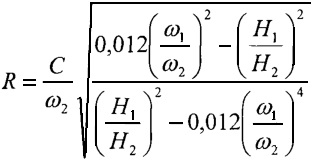 ,
,
где R - приближенное расстояние до источника сигналов, С - скорость света,
ω1, ω2 - соответственно верхняя и нижняя частоты спектра сигнала ЭМИ,
H1, Н2 - соответственно амплитуды сигналов нижней и верхней частоты спектра.
Принимают за приближенное местонахождение источника сигнала точку на расстоянии R в направлении на источник сигнала из первой точки регистрации и определяют приближенные угол прихода сигнала β1 и расстояние b1 до второй точки регистрации по известному расстоянию D между точками регистрации, приближенному расстоянию R и углу прихода сигнала γ на первую точку.
Для первой и второй точек регистрации определяют ожидаемый интервал времени прихода инфразвука по расстояниям R и b1 и заданной скорости инфразвука с началом интервала времени, вычисленным при максимальной скорости инфразвука и минимальных значениях R и b1.
Прекращают обработку сигналов до наступления ожидаемых интервалов времени прихода инфразвука на точки регистрации, а с наступлением указанных интервалов времени регистрируют время прихода инфразвука для первой и второй точек регистрации и вычисляют разности Δt1 и Δt2 времени прихода ЭМИ и инфразвука для двух точек регистрации.
По измеренным разностям времени прихода ЭМИ и инфразвука Δt1 и Δt2, по углам прихода сигналов β1 и γ на точки регистрации и по известному расстоянию D между точками регистрации определяют уточненное значение скорости инфразвука (1) во время прохождения сигналов и уточненную дальность (2) до источника сигналов.
По азимуту и уточненной дальности уточняют местоположение источника сигналов.
При необходимости, более точное местоположение источника сигналов определяют итерациями путем определения по уточненному местоположению источника сигналов новых значений β1, скорости инфразвука и дальности до источника сигналов.
Таким образом, за счет использования сигналов магнитных антенн с более низким уровнем шумов, а также за счет удаления помех, приходящих во время прохождения инфразвука до точек регистрации, повышена помехоустойчивость способа.
Используемые действия способа реализуются в реальном масштабе времени для инфразвука, сейсмических колебаний и других сопутствующих ЭМИ явлений, позволяют уменьшить погрешность использования его на однопозиционном пункте наблюдения или на средстве передвижения и увеличить помехоустойчивость при наличии мешающих сигналов, приходящих во время прохождения инфразвуком расстояния от источника сигнала до пункта наблюдения.
Источники информации
1. Караваев В.В., Сазонов В.В. Статистическая теория пассивной локации. - М.: Радио и связь, 1987, стр. 150.
2. Результаты моделирования триангуляционного способа определения дальности с применением двух и трех станций, Коровин Е.С. 2012 г. ОАО «Центральное конструкторское бюро автоматики», г. Омск, радиосеминар, доклад, стр. 1-33, http://radioseminar.omsu.ru/files/simulation/the%20simulation
%20results%20triangulation%20method%20of%20range%20with
%20the%20use%20of%20two%20or%20three%20stations.pdf
3. Электромагнитная акустическая система обнаружения грозовых разрядов, К.В. Вознесенская, А.В. Соловьев, И.С. Гибанов, Д.С. Провоторов, М.В. Чепчугов, А.А. Бочаров, Вестник науки Сибири. 2012. №5 (6), http://sjs.tpu.ru/journal/article/view/510/420, УДК 534.321.8.
4. Широкополосное двухкомпонентное приемное антенное устройство (патент РФ №2474014 C1, H01Q 7/04, 2011 г., опубл. 27.01.2013).
5. Способ и устройство штормового предупреждения (патент США №4672305, G01N 31/02, 1984 г., опубл. 09.07.1987 г.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения направления и дальности до источника сигналов | 2016 |
|
RU2620925C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| Устройство для определения направления и дальности до источника сигналов | 2016 |
|
RU2633647C1 |
| Устройство для определения пеленга и дальности до источника сигналов | 2016 |
|
RU2631907C1 |
| Устройство для определения местоположения источника сигналов | 2016 |
|
RU2631906C1 |
| Устройство для определения направления и дальности до источника сигналов | 2016 |
|
RU2620919C1 |
| Способ определения местоположения источника сигналов | 2016 |
|
RU2624984C1 |
| Устройство для определения местоположения источника сигналов | 2016 |
|
RU2620976C1 |
| Устройство для определения пеленга и дальности до источника сигналов | 2016 |
|
RU2620917C1 |
| Устройство для определения пеленга и дальности до источника сигналов | 2016 |
|
RU2620910C1 |

Изобретение относится к измерительной технике, в частности к пеленгаторам. Техническим результатом, обеспечиваемым заявляемым изобретением, является уменьшение погрешности использования его на однопозиционном пункте наблюдения или на средстве передвижения и увеличение помехоустойчивости при наличии мешающих сигналов, приходящих во время прохождения инфразвуком расстояния от источника сигнала до пункта наблюдения. Технический результат достигается тем, что в способе определения пеленга и дальности до источника сигналов, заключающемся в том, что регистрируют время прихода электромагнитного излучения (ЭМИ) на однопозиционный пункт наблюдения с двумя точками регистрации инфразвука, а также время прихода инфразвука на две точки регистрации и определяют для каждой точки регистрации разность времени прихода ЭМИ и инфразвука, дополнительно, до прихода инфразвука на две точки регистрации, регистрируют магнитные компоненты сигнала ЭМИ двумя взаимно перпендикулярными в горизонтальной плоскости магнитными антеннами, ориентированными максимумами диаграмм направленности, соответственно, на Север-Юг и Запад-Восток, определяют по соотношению сигналов магнитных антенн азимут и определяют приближенную дальность до источника сигналов по изменению спектра сигнала ЭМИ в зависимости от пройденного ЭМИ расстояния, для чего определяют суммарный спектр сигналов двух магнитных антенн, определяют верхнюю и нижнюю частоты спектра и амплитуды сигналов на этих частотах, определяют отношение верхней частоты к нижней частоте спектра и отношение амплитуды нижней частоты к амплитуде верхней частоты спектра, по полученным отношениям, нижней частоте спектра, скорости света и азимуту определяют приближенные дальность до источника электромагнитного излучения и его местоположение, определяют по приближенному местоположению для каждой точки регистрации угол прихода сигнала между направлением на источник сигнала и прямой, соединяющей точки регистрации, определяют приближенное расстояние до источника сигнала и по заданной скорости инфразвука определяют ожидаемый интервал времени прихода инфразвука для каждой точки регистрации с учетом погрешности заданной скорости инфразвука и определения приближенной дальности и прекращают анализ сигналов до наступления ожидаемых интервалов времени прихода инфразвука, а в течение ожидаемых интервалов времени после прихода инфразвука и определения разности времени прихода ЭМИ и инфразвука для каждой точки регистрации, по углам прихода сигналов, известному расстоянию между точками регистрации и разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации уточняют скорость инфразвука во время прохождения сигналов, по разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации и уточненной скорости инфразвука во время прохождения сигналов уточняют значение дальности до источника сигналов, а по азимуту и уточненному значению дальности уточняют местоположение источника сигналов. 1 ил.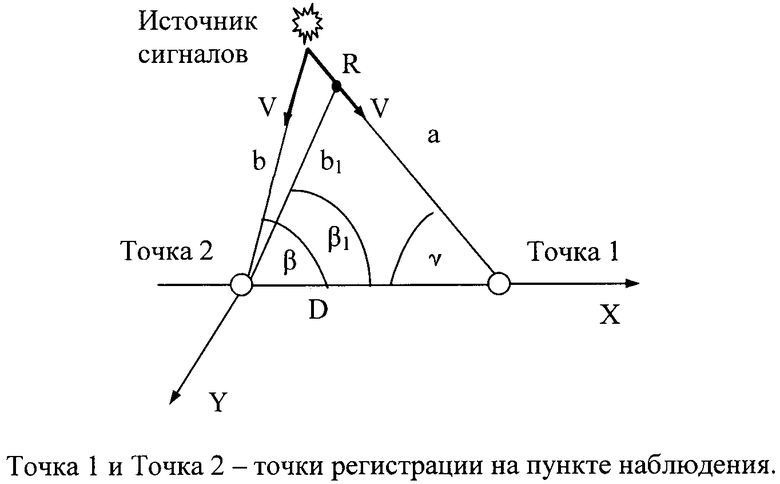
Способ определения пеленга и дальности до источника сигналов, заключающийся в том, что регистрируют время прихода электромагнитного излучения (ЭМИ) на однопозиционный пункт наблюдения с двумя точками регистрации инфразвука, а также время прихода инфразвука на две точки регистрации и определяют для каждой точки регистрации разность времени прихода ЭМИ и инфразвука, отличающийся тем, что дополнительно, до прихода инфразвука на две точки регистрации, регистрируют магнитные компоненты сигнала ЭМИ двумя взаимно перпендикулярными в горизонтальной плоскости магнитными антеннами, ориентированными максимумами диаграмм направленности, соответственно, на Север-Юг и Запад-Восток, определяют по соотношению сигналов магнитных антенн азимут и определяют приближенную дальность до источника сигналов по изменению спектра сигнала ЭМИ в зависимости от пройденного ЭМИ расстояния, для чего определяют суммарный спектр сигналов двух магнитных антенн, определяют верхнюю и нижнюю частоты спектра и амплитуды сигналов на этих частотах, определяют отношение верхней частоты к нижней частоте спектра и отношение амплитуды нижней частоты к амплитуде верхней частоты спектра, по полученным отношениям, нижней частоте спектра, скорости света и азимуту определяют приближенные дальность до источника электромагнитного излучения и его местоположение, определяют по приближенному местоположению для каждой точки регистрации угол прихода сигнала между направлением на источник сигнала и прямой, соединяющей точки регистрации, определяют приближенное расстояние до источника сигнала и по заданной скорости инфразвука определяют ожидаемый интервал времени прихода инфразвука для каждой точки регистрации, с учетом погрешности заданной скорости инфразвука и определения приближенной дальности, и прекращают анализ сигналов до наступления ожидаемых интервалов времени прихода инфразвука, а в течение ожидаемых интервалов времени после прихода инфразвука и определения разности времени прихода ЭМИ и инфразвука для каждой точки регистрации, по углам прихода сигналов, известному расстоянию между точками регистрации и разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации уточняют скорость инфразвука во время прохождения сигналов, по разностям времени прихода ЭМИ и инфразвука для каждой точки регистрации и уточненной скорости инфразвука во время прохождения сигналов уточняют значение дальности до источника сигналов, а по азимуту и уточненному значению дальности уточняют местоположение источника сигналов.
| А.В | |||
| Панюков, А.К | |||
| Богушов | |||
| Спектрально-статистический метод идентификации параметров положения дипольного источника электромагнитного поля | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для постройки крыльев самолета | 1924 |
|
SU3115A1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ГРОЗОВЫХ РАЗРЯДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184983C2 |
| Устройство для регистрации молний | 1979 |
|
SU777612A1 |
| Фазовый анализатор местоположения гроз | 1984 |
|
SU1223175A1 |
| US 3937951 A1, 10.02.1976. | |||

