Изобретение относится к области магнитных измерений, а именно к способам измерения намагниченности коллоидных растворов ферромагнитных наночастиц (магнитных жидкостей) с использованием методов электронного или ядерного магнитных резонансов, и может быть использовано для контроля качества магнитных жидкостей при их производстве и в процессе их эксплуатации.
Известен способ измерения намагниченности магнитной жидкости путем поочередного помещения образцов из нее, имеющих формы цилиндра и шара, в сильное постоянное однородное магнитное поле, напряженность которого Н можно менять, и переменное слабое магнитное поле с постоянной частотой, например в катушку датчика спектрометра ядерного магнитного резонанса. Измерив напряженности магнитного поля H1 и Н2, при которых получаются максимальные сигналы ЯМР с образцами в виде цилиндра и шара соответственно, можно вычислить намагниченность магнитной жидкости по формулам M=3(H2-H1), если ось цилиндра параллельна вектору напряженности магнитного поля Н, или М=6(Н1-Н2), если ось цилиндра нормальна вектору Н. Недостаток способа в необходимости иметь дорогостоящий спектрометр ЯМР с меняющимся магнитным полем и в необходимости замены образцов. Способ описан в патенте RU 2361195 С1, опубл. в бюлл. №19, 10.07.2009, авторы Жерновой А.И., Рудаков Ю.Р.
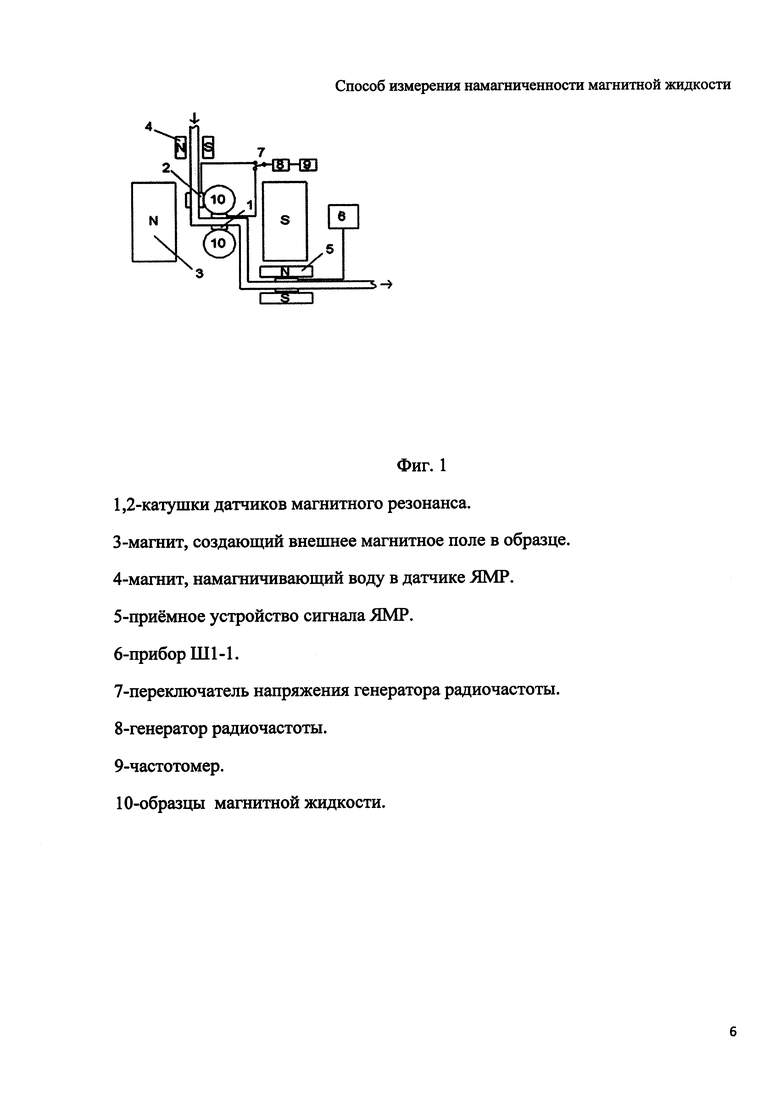
Известен другой способ измерения намагниченности магнитной жидкости, описанный, например, в статье «Получение кривой намагничивания дисперсии парамагнитных наночастиц путем нахождения намагниченности и намагничивающего поля методом ЯМР», опубликованной в журнале Научное приборостроение, 2009, т. 19, №3, с. 57-61, авторы А.И. Жерновой, В.Н. Наумов, Ю.Р. Рудаков. В этом способе исследуемую магнитную жидкость, заполняющую два параллельно расположенных стеклянных цилиндра 10 (фиг. 1), помещали в магнитное поле, создаваемое постоянным магнитом 3. В щели между цилиндрами и на боковой поверхности одного из них были установлены датчики ядерного магнитного резонанса 1 и 2, с помощью которых измерялись напряженность и индукция магнитных полей в местах их расположения. Датчик 1, установленный между цилиндрами, где линии напряженности магнитного поля параллельны поверхностям цилиндров, измерял напряженность магнитного поля Н внутри магнитной жидкости, а датчик 2, установленный вблизи боковой поверхности одного из цилиндров, где линии напряженности нормальны поверхности цилиндра, измерял индукцию магнитного поля В внутри магнитной жидкости. Намагниченность определялась по формуле М=(В/μо)-Н. Основной недостаток этого способа состоит в измерении В и Н двумя датчиками, расположенными в разных местах образца, так как при этом небольшое различие индукции внешнего магнитного поля в местах расположения датчиков 1 и 2 приводит к ошибке вычисления величины (В/μо)-Н, а следовательно, и намагниченности М. Другой недостаток состоит в необходимости иметь два цилиндрических образца, что увеличивает необходимый объем магнитной жидкости. Этот способ можно принять за прототип.
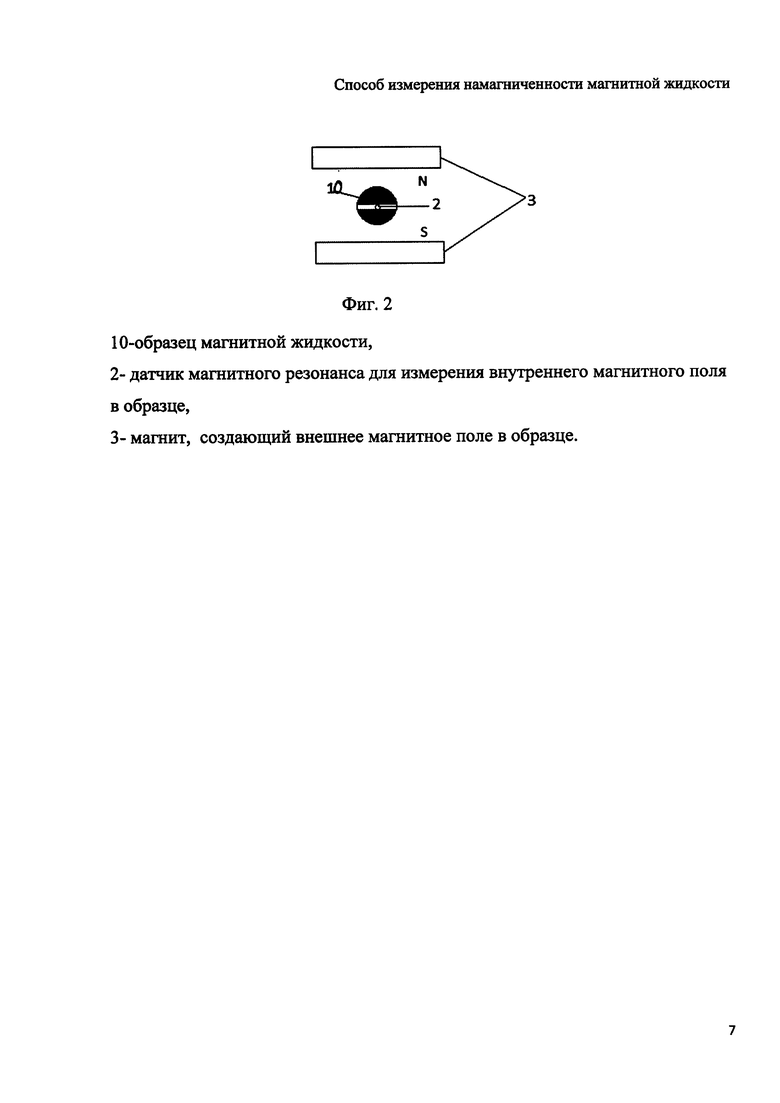
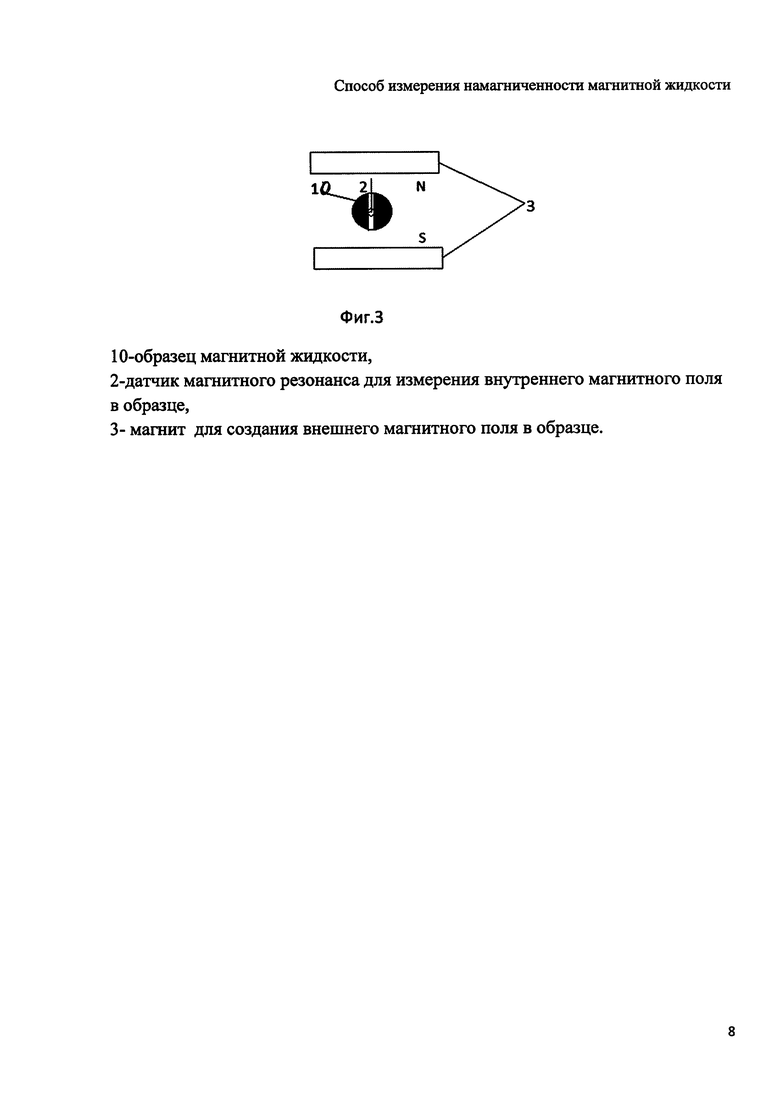
Для устранения указанных выше недостатков известных способов предлагается способ, в котором, как и в известных способах, для измерения намагниченности магнитной жидкости образец из нее 10 помещается во внешнее постоянное однородное магнитное поле, создаваемое магнитом 3 (фиг. 2 и 3). Образец 10 имеет форму заполненного исследуемой магнитной жидкостью эллипсоида вращения (например, цилиндра или шара), имеющего параллельную оси эллипсоида свободную от магнитной жидкости плоскую полость, в центре которой находится один не содержащий магнитной жидкости датчик ядерного или электронного магнитного резонанса для измерения магнитного поля. Если образец по отношению к линиям магнитной индукции занимает положение, показанное на фиг. 2, в котором плоскость полости в образце параллельна линиям индукции внешнего магнитного поля, создаваемого магнитом 3, то напряженность поля в полости равна напряженности поля Н внутри магнитной жидкости, а если образец по отношению к линиям магнитной индукции занимает положение, показанное на фиг. 3, где плоскость полости в образце нормальна линиям индукции внешнего магнитного поля, то индукция в полости. В равна индукции магнитного поля внутри магнитной жидкости (Об этом говорится, например, в учебнике «Электричество». М.: Наука, 1985. 576 с., автор Калашников С.Г.). В результате, измерив датчиком магнитного резонанса напряженность магнитного поля Н при взаимном положении образца и магнита, которое показано на фиг. 2, а затем повернув образец или магнит на 90 градусов и измерив тем же датчиком магнитную индукцию В при взаимном положении образца и магнита, которое показано на фиг. 3, можно определить намагниченность по формуле: М=(В/μo)-Н, где μo - магнитная постоянная. Если для измерения магнитного поля применить датчики магнитного резонанса протонов или электронов, то в положении образца, показанном на фиг. 1, измеряется резонансная частота f1=βн⋅H, а в положении образца, показанном на фиг. 2, измеряется резонансная частота f2=βв⋅B, где βн и βв - гиромагнитные отношения, связанные между собой: βн=βв/μо, поэтому для определения намагниченности можно использовать выражение M=(f1-f2)/βн, где при использовании резонанса протонов βн=53,4(Гц⋅м/А), а при использовании резонанса электронов β=35244(Гц⋅м/А).
Пример реализации предлагаемого способа
Для проверки осуществимости предлагаемого способа была использована экспериментальная установка, схема которой описана в прототипе и приведена на фиг. 1. Образец магнитной жидкость имел вид сдвоенного цилиндра 10, в полости между половинками которого был расположен датчик магнитного резонанса (ЯМР) 2 для измерения внутреннего магнитного поля в образце, содержащий радиочастотную катушку, надетую на хлорвиниловую трубку, соединяющую резервуар, расположенный в магнитном поле сильного постоянного магнита 4 поляризатора, с трубкой датчика ядерного магнитного резонанса, расположенного в однородном магнитном поле магнита 5. Имеющийся в прототипе датчик магнитного резонанса 1 отсутствовал. Катушка датчика ЯМР 2 была присоединена к генератору радиочастоты 8(переключатель 7 отсутствовал). Катушка датчика сигнала ЯМР приемного устройства 5 была присоединена к измерителю магнитной индукции 6, регистрирующему сигнал ЯМР. Образец магнитной жидкости 10 был помещен в магнитное поле с индукцией В, создаваемое магнитом 3. Поворотом магнита 3 или образца 10 направление В можно было устанавливать параллельно или перпендикулярно плоскости полости, где расположена катушка датчика ЯМР 2. Для измерения намагниченности исследуемой магнитной жидкости на катушку датчика ЯМР 2 было подано напряжение от генератора радиочастоты 8. Индукция В была установлена параллельно плоскости полости, в которой расположен датчик ЯМР 2, и изменением частоты генератора 8 установлена и измерена частота ЯМР f1, при которой сигнал на выходе прибора Ш1-1 меняет полярность. Затем поворотом магнита 3 на 90 градусов направление создаваемой магнитом 3 индукции В сделали перпендикулярным плоскости полости, в которой расположен датчик ЯМР 2, и подобрали и измерили частотомером 9 частоту генератора 8 f2, при которой сигнал ЯМР на выходе прибора Ш1-1 изменил полярность. Намагниченность в единицах А/м нашли по формуле M=(f2-f1)/βн, она оказалась такой же, как при измерениях методом-прототипом с использованием двух разных датчиков ЯМР. Таким образом, отличие предлагаемого способа от прототипа состоит в том, что в прототипе частоты f1 и f2 измеряют при одинаковом взаимном расположении образца 10 и магнита 3 двумя разными датчиками 1 и 2, расположенными в разных местах образца, где направления В относительно стенки образца отличаются на 90 градусов, а в предлагаемом способе частоты f1 и f2 измеряют одним датчиком 2, расположенным в центре образца, при двух взаимных угловых положениях образца 10 и магнита 3 (датчик ЯМР 1 и переключатель 7 отсутствуют). Применение одного датчика ЯМР вместо двух значительно упростило процедуру измерения намагниченности, так как сделало ненужной настройку на условие f1=f2 при отсутствии исследуемого образца, осуществляемую изменением топографии магнитного поля магнита 3. Так как удовлетворительную настройку двух датчиков, расположенных в разных местах магнита, на условие f1=f2 осуществить практически невозможно (особенно при измерениях с изменением температуры), то предусмотренная формулой изобретения замена двух датчиков измерения магнитного поля одним приводит к уменьшению ошибки измерения намагниченности.
Изобретение относится к измерительной технике, в частности к способам измерения намагниченности магнитной жидкости. Техническим результатом является повышение точности измерений намагниченности магнитной жидкости и снижение необходимого минимального объема исследуемого образца. Технический результат достигается измерением магнитного поля в эллипсоидном образце с магнитной жидкостью, причем образец содержит плоскую полость с одним датчиком для измерения магнитного поля методом магнитного резонанса. Магнитное поле находится как отношение разности частот магнитного резонанса при индукции внешнего магнитного поля параллельной плоскости с датчиком и перпендикулярной плоскости с датчиком к гиромагнитному отношению частиц в датчике магнитного резонанса. 3 ил.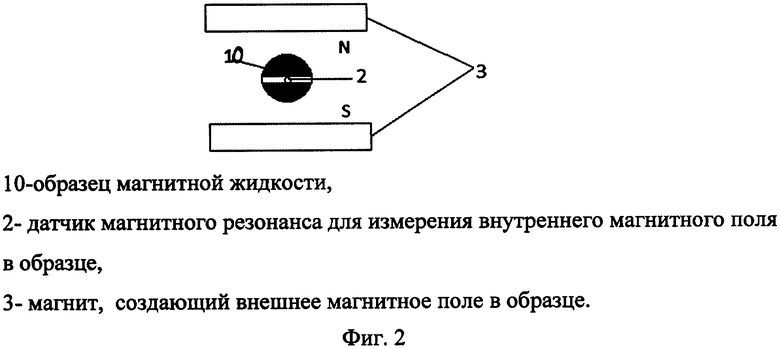
Способ измерения намагниченности магнитной жидкости путем помещения образца из нее во внешнее постоянное однородное магнитное поле и регистрации сигнала магнитного резонанса, отличающийся тем, что одним датчиком магнитного резонанса, не содержащим исследуемой магнитной жидкости и расположенным в плоской полости внутри образца, измеряют две частоты магнитного резонанса: f1 - при индукции внешнего магнитного поля параллельной плоскости полости, в которой расположен датчик магнитного резонанса, и f2 - при индукции внешнего магнитного поля нормальной плоскости полости, в которой расположен датчик магнитного резонанса, намагниченность М находят по формуле M=(f1-f2)/β, где β - гиромагнитное отношение частиц в датчике магнитного резонанса.
| US 8942931 B2, 27.01.2015 | |||
| Способ измерения магнитной восприимчивости жидких образцов | 1980 |
|
SU918830A1 |
| СПОСОБ ИЗМЕРЕНИЯ НАМАГНИЧЕННОСТИ МАГНИТНОЙ ЖИДКОСТИ | 2008 |
|
RU2361195C1 |
| US 9046493 B2, 02.06.2015 | |||
| EP 1981996 B1, 09.04.2014. | |||

