Настоящее изобретение относится к балансирному пневматическому манипулятору.
Манипуляторы данного типа широко используются в промышленном производстве для поддержки и перемещения в сбалансированном положении различных инструментов и устройств, которые обычно включают в себя захватные устройства, сварочные аппараты, отвертки и т.п., сводя к минимуму ручной труд пользователя.
С годами в ходе технологического прогресса происходило постоянное повышение чувствительности манипуляторов подобного типа, которые испытывали проблемы частичной разбалансированности при увеличении веса перемещаемых изделий.
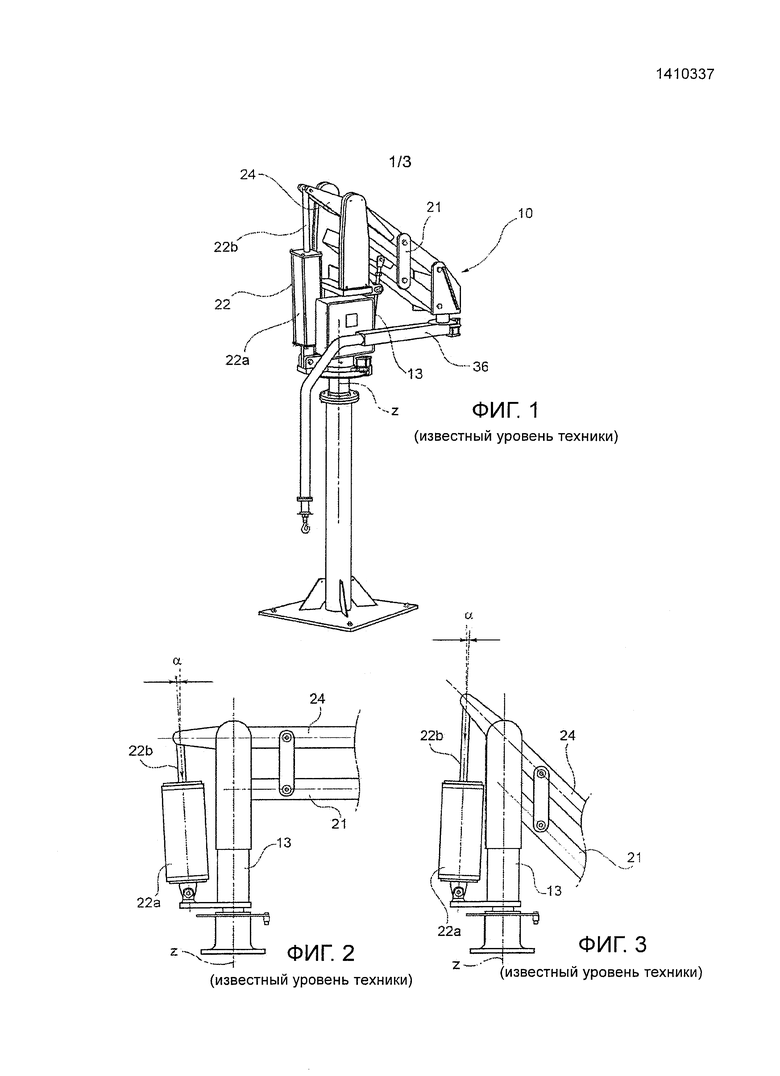
Для лучшего понимания предшествующего уровня техники и присущих ему проблем, вначале, со ссылкой на фиг.1-3 будет рассмотрен пневматический манипулятор традиционного типа. Балансирный пневматический манипулятор 10 содержит опорное устройство, которое включает в себя узел 13, способный поворачиваться вокруг вертикальной оси z, и шарнирный параллелограммный механизм 21, включающий в себя руку 24 с маховыми движениями, установленную на поворотном узле 13 с возможностью вращения вокруг горизонтальной оси колебаний. Балансирующее действие обеспечивается пневматическим линейным приводом 22, который включает в себя цилиндр 22а, установленный с возможностью поворота на поворотном узле 13, и штангу 22b, установленную с возможностью поворота на руке 24 с маховыми движениями. Поворотная горизонтальная рука 36 с закрепленным в ней инструментом, таким как отвертка, сварочный аппарат, захватное устройство или иной инструмент, установлена на шарнирном параллелограммном механизме.
Недостаток вышеуказанной компоновки заключается в том, что при разных наклонах, которым подвергается привод в разных рабочих положениях, возникает горизонтальная составляющая передаваемых усилий, которая увеличивается при отклонении линии действия силы привода на величину α относительно вертикальной оси. Весьма незначительные угловые отклонения, порядка нескольких шестидесятых долей градуса, негативно влияют на балансировку и требуют ручных усилий при перемещении, которые увеличиваются на величину углового отклонения привода от вертикали. Величина необходимого ручного усилия, таким образом, увеличивается от оптимального значения порядка 20-30 Н до 100-150 Н или более, когда угловое отклонение от вертикали достигает максимума. В подобной ситуации перемещаемый груз теряет устойчивость, а манипуляции с ним затрудняются, что негативно влияет на безопасность и точность движении.
Задача настоящего изобретения заключается в том, чтобы предложить балансирный пневматический манипулятор, способный устранить вышеуказанные недостатки. В частности, желательно предложить манипулятор, который, вне зависимости от степени выдвижения пневматического привода, требует минимального постоянного ручного усилия.
Эта и другие задачи и преимущества, которые станут понятны из описания ниже, достигаются согласно изобретению посредством балансирного пневматического манипулятора, обладающего признаками по п.1 формулы изобретения. Предпочтительные варианты осуществления изложены в зависимых пунктах формулы изобретения.
Признаки и преимущества изобретения станут понятны из последующего подробного описания, предлагаемого исключительно в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи.
На фиг.1 показан вид в перспективе балансирного манипулятора известного типа;
на фиг.2 и 3 - местные схематические виды, поясняющие разные угловые положения, принимаемые пневматическим приводом с балансировочным устройством известного типа по фиг.1;
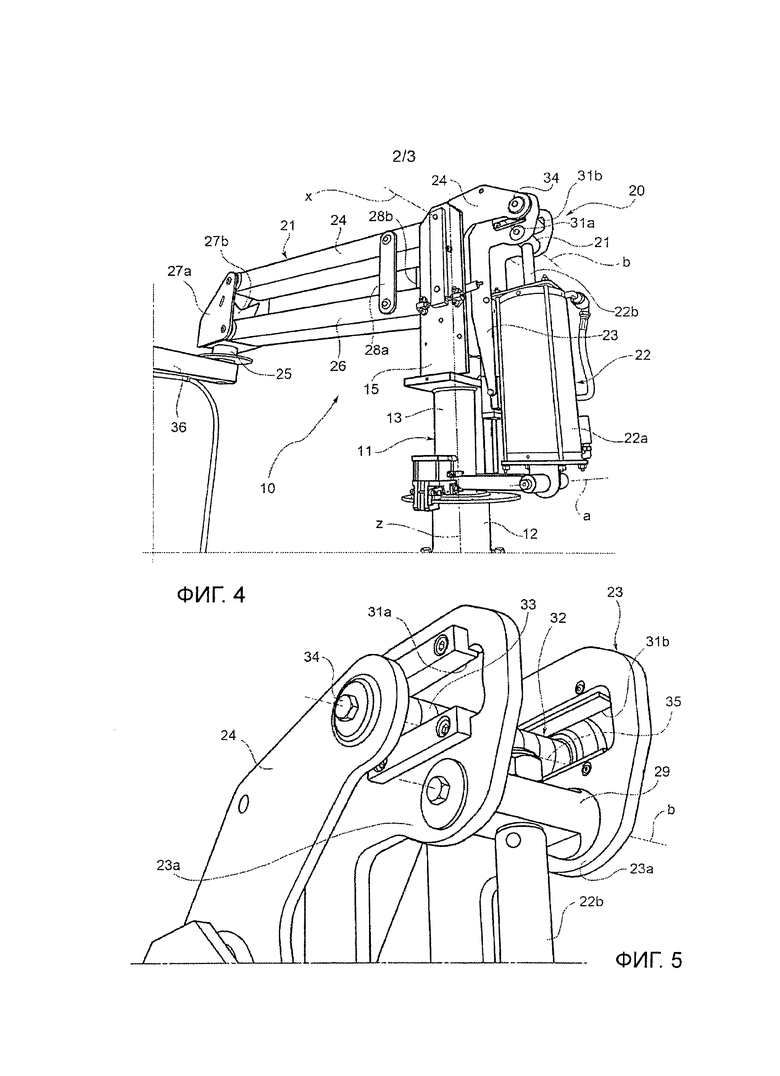
на фиг.4 - местный вид в перспективе балансирного пневматического манипулятора по одному из вариантов осуществления настоящего изобретения;
на фиг.5 - укрупненный вид фрагмента манипулятора по фиг.4;
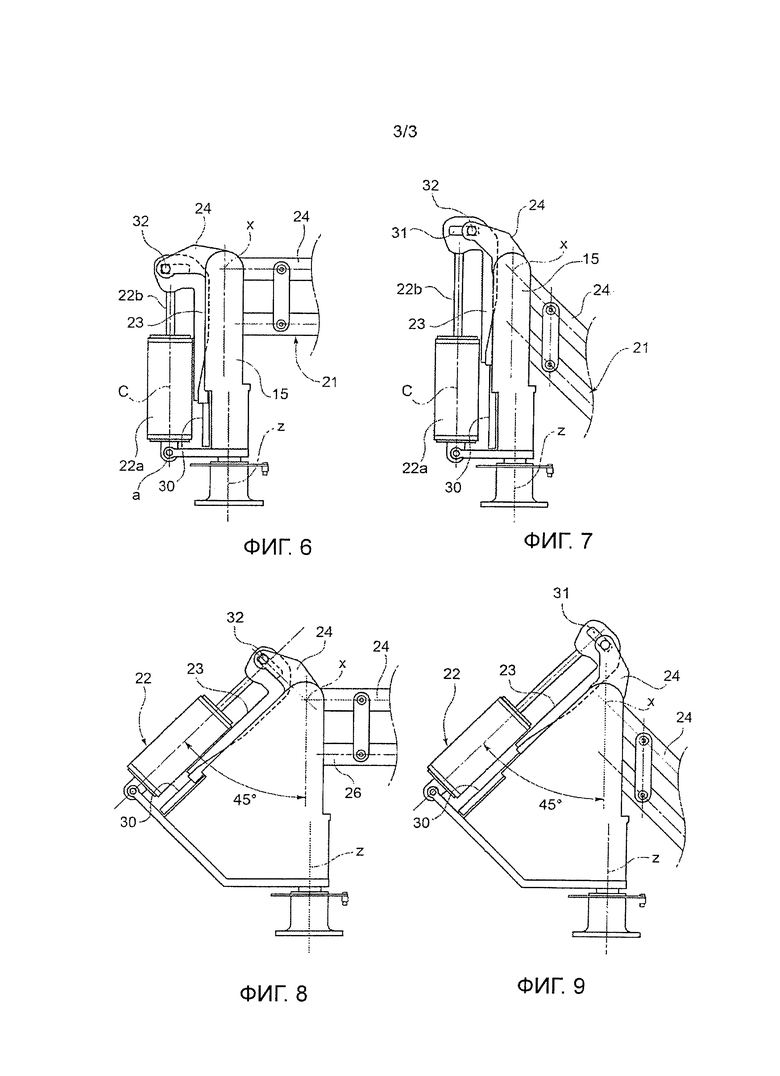
на фиг.6 и 7 - местные схематические виды, поясняющие два разных положения, принимаемые пневматическим приводом с балансировочным устройством по фиг.4; и
на фиг.8 и 9 - местные схематические виды, поясняющие два положения, принимаемые пневматическим приводом, установленным по другому варианту осуществления изобретения.
На фиг.4 показан манипулятор, в целом обозначенный позицией 10 и содержащий опорное устройство 11, на котором установлено балансировочное устройство 20. Опорное устройство 11 определяет вертикальную геометрическую ось z и в данном примере содержит неподвижную нижнюю вертикальную колонну 12 и верхний узел 13, который может поворачиваться вокруг вертикальной оси z. Нижняя колонна 12 может быть выполнена за одно целое с основанием (не показано), которое может быть прикреплено к полу или к подвижной опорной поверхности (не показана). В других областях применения опорное устройство может быть частью подвесной конструкции, например конструкции, подвешенной за каретку, перемещающуюся по направляющим. В подобных других областях применения поворотный узел 13 расположен ниже верхней бесповоротной части. В последующем тексте термины и фразы, указывающие положение и ориентацию, такие как «верхний» и «нижний», используются применительно к изображенному примеру, между тем их не следует рассматривать в качестве ограничения.
В варианте осуществления по фиг.4 у поворотного узла 13 имеется пара вертикальных стоек 15 (из которых видна лишь одна), проходящих параллельно и разнесенных на равное расстояние вокруг вертикальной оси z.
Балансировочное устройство 20 установлено на поворотном узле 13 и содержит шарнирный параллелограммный механизм 21, пневматический линейный привод 22 и салазки 23, подвижно установленные на поворотном узле 13 опорного устройства.
В верхней части стоек 15 верхняя рука 24 с маховыми движениями, являющаяся частью шарнирного параллелограммного механизма 21, поворачивается вокруг горизонтальной оси х колебаний (также показанной на фиг.6 и 7). Пневматический привод действует между нижней соединительной осью а, являющейся неотъемлемой частью поворотного узла 13, и верхней соединительной осью b, определяемой салазками 23. Предпочтительно привод 22 является пневматическим приводом однократного действия, с цилиндром 22а, в данном примере находящимся в нижнем положении, и верхней выдвижной штангой 22b. Более конкретно, на изображенном варианте осуществления цилиндр привода соединен с нижней соединительной осью, тогда как штанга 22b соединена с верхней соединительной осью b. Буквой «с» (на фиг.6 и 7) обозначена линия действия силы привода, которая в данном примере направлена, по существу, вертикально и параллельно оси z. На фиг.4 и 5 позицией 29 обозначен шпиндель, неподвижно прикрепленный к головке штанги 22b, и поворачивающийся на салазках 23 вокруг горизонтальной оси b.
На противоположном торце руки 24 с маховыми движениями и шарнирного параллелограмма 21 установлен, известным образом, вертикальный шпиндель 25, вокруг которого может поворачиваться горизонтальная рука 36. Подобная рука может выступать в качестве опоры для различных устройств, таких как захватные приспособления, отвертки, сварочные аппараты и т.п.
Шарнирный параллелограммный механизм 21 содержит, помимо верхней руки 24 с маховыми движениями, вторую нижнюю руку с маховыми движениями или рычаг 26, который расположен параллельно верхней руке 24 с маховыми движениями, а его концы (не показаны) шарнирно прикреплены к стойкам 15. Две вертикальные соединительные пластины 27а, 27b, которые расположены параллельно друг другу, шарнирно прикреплены к реагирующему концу механизма в том месте, где установлен вертикальный шпиндель. Два других соединительных звена 28а, 28b известным образом шарнирно прикреплены к верхней и нижней рукам с маховыми движениями. Параллелограммный механизм, по существу, не отличается от механизма известного типа, поэтому его подробное описание будет опущено.
Как отмечалось выше, линейный привод 22 действует между поворотным узлом 13 и параллелограммным механизмом 21, заставляя руку 24 поворачиваться вокруг горизонтальной оси х колебаний для поднятия и опускания, во время поворотных поступательных движений вертикального шпинделя 25, который опирается на конец параллелограммного механизма, расположенный оппозитно концу, рядом с которым установлен привод 22. Привод 22 воздействует на руку 24 не напрямую, а через салазки 23.
Салазки 23 могут скользить вдоль первой линейной направляющей, которая схематически обозначена позицией 30 на фиг.6 и 7 и которая выполнена за одно целое с поворотным узлом 13 и расположена параллельно линии «с» действия силы привода 22. Для улучшения балансировки и распределения нагрузки первая направляющая 30 предпочтительно включает в себя пару параллельных линейных направляющих (или «опорных» направляющих), которые проходят параллельно линии действия силы привода.
У салазок 23 имеется вторая линейная направляющая 31, предпочтительно состоящая из второй пары параллельных прямолинейных направляющих 31а, 31b, которые расположены перпендикулярно первой опорной направляющей или паре опорных направляющих 30. Подвижный элемент 32, установленный на конце верхней руки 24 с маховыми движениями, рядом с приводом 22, зацеплен вдоль второй пары направляющих 31а, 31b. Предпочтительно вторые направляющие 31а, 31b салазок выполнены в виде пары параллельных пазов, а подвижный элемент 32 содержит цилиндрический ролик 33, который установлен со свободным ходом вокруг горизонтальной оси (показана пунктирной линией на фиг.5 и обозначена позицией 35), закрепленной в месте 34 на конце верхней руки 24 с маховыми движениями. По данному варианту осуществления цилиндрический ролик 33 установлен при помощи пары роликовых подшипников (детализировано не показаны), разнесенных вдоль горизонтальной оси 37, каждый из которых состоит из соответствующего внешнего неподвижного кольца, прикрепленного к руке 24, и соответствующего внутреннего поворотного кольца, зафиксированного на одном из двух оппозитных концов ролика 33.
Цилиндрический ролик 33 предпочтительно помещен с заданным минимальным вертикальным зазором во вторую направляющую 31 (или в параллельные вторые направляющие 31а, 31b). Зазор величиной порядка нескольких десятых миллиметра позволяет цилиндрическому ролику вращаться вокруг вторых направляющих 31a, 31b при выдвижении или отводе назад привода 22 во время его перемещения между попеременными положениями, схематически показанными на фиг.6 и 7. Контакт качения между подвижным элементом 32 и вторыми направляющими 31а, 31b сводит к минимуму трение между салазками и приводом.
По одному из альтернативных вариантов осуществления (не показан) подвижный зацепляющий элемент 32 может содержать блок, который скользящим образом, вместо качения, зацепляется со второй направляющей или направляющими 31, имеющимися в салазках 23. В этой связи форма направляющей (или направляющих) 31 может отличаться от формы одного или двух пазов, в зависимости от формы блока (или блоков). Использование пазов предпочтительно, поскольку это обеспечивает оптимальный обмен усилиями между салазками 23 и рукой 24, и создает надежное соединение между этими двумя элементами, позволяя использовать конструктивную прочность, обеспечиваемую двумя отверстиями, образованными в руке 24.
Как схематически показано на фиг.7, конец руки 24 с маховыми движениями может быть двойным, образуя два параллельных вертикальных пластинчатых элемента 24а, 24b, тем самым позволяя добиться эффективной установки подвижного зацепляющего элемента 32. Салазки 23, в варианте осуществления по фиг.7, также включают в себя пару параллельных металлических пластин 23а, 23b, разнесенных в горизонтальном направлении, в каждой из которых образована одна из двух вторых направляющих для цилиндрического ролика 33 (или для скользящего блока). По одному из вариантов осуществления, оптимизирующем доступное пространство и соединения между приводом и верхним узлом, каждая из пластин салазок имеет, по существу, L-образную форму, прямой или длинный участок подобной L-образной формы соединен с первой линейной направляющей 30, тогда как в коротком участке L-образной формы имеется паз или вторая направляющая 31. При изготовлении первой линейной направляющей 30 особенно предпочтительно использовать прямолинейные шариковые направляющие.
На фиг.6 и 7 схематически показаны два оппозитных попеременных положения, занимаемых манипулятором. При выдвижении манипулятор перемещается из положения по фиг.6 в положение по фиг.7, в результате чего салазки 23 перемещаются вдоль первой направляющей 30 с одновременным перемещением подвижного зацепляющего элемента 32 вдоль второй направляющей 31 салазок.
За счет наличия салазок, расположенных между приводом и рукой с маховыми движениями, и взаимно перпендикулярного расположения направляющих 30 и 31 привод передает на параллелограммный механизм исключительно вертикальное усилие, другими словами, усилие без горизонтальных составляющих. Это обеспечивает постоянную балансировку манипулятора во всех диапазонах перемещений привода, не требуя от оператора приложения значительных постоянных усилий во время выполнения операций, способствуя тем самым точным движениям инструмента, совмещенного с манипулятором. Кроме этого, манипулятор отличается исключительной устойчивостью, позволяя оператору на короткое время отпускать обе руки от манипулятора, который продолжает неподвижно оставаться в прежнем положении, что удобно с точки зрения безопасности и простоты использования.
Следует понимать, что изобретение не ограничено изображенными и описанными здесь вариантами осуществления, которые следует рассматривать в качестве типовых вариантов осуществления манипулятора; на самом деле, изобретение допускает внесение изменений как с точки зрения формы и компоновки деталей, так и с точки зрения особенностей конструкции и функционирования. Например, как показано на фиг.8 и 9, по другому варианту осуществления манипулятора линия действия силы привода 22 может проходить наклонно относительно вертикали, например, под углом в 45°. Вследствие этого, первая направляющая 30 будет наклонена параллельно линии «с», а вторая направляющая 31 будет проходить параллельно последней. Кроме этого, вместо единственного привода манипулятор может быть оснащен двумя пневматическими приводами. Например, два пневматических линейных привода могут быть установлены параллельно друг другу, рядом друг с другом, таким образом, что соответствующие цилиндры будут установлены на поворотном узле 13 вдоль оси «а», а соответствующие штанги будут выполнены за одно целое со шпинделем 29 или с его выступами, с двух оппозитных сторон от колебательной руки 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU1050863A1 |
| НЕПОДВИЖНАЯ КОНСТРУКЦИЯ УСТРОЙСТВА РЕВЕРСА ТЯГИ И ГОНДОЛА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ТАКИМ УСТРОЙСТВОМ | 2013 |
|
RU2650982C2 |
| УСТРОЙСТВО СКОЛЬЖЕНИЯ ДЛЯ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА, ОСНАЩЕННОЕ УСОВЕРШЕНСТВОВАННЫМ РАСЦЕПЛЯЮЩИМ УЗЛОМ | 2019 |
|
RU2747319C1 |
| ГРУЗОВОЙ ВАГОН С ОТКИДНЫМИ БОКОВЫМИ СТЕНКАМИ ВАГОНА | 2013 |
|
RU2645550C2 |
| Установка для обертывания поддонов | 2020 |
|
RU2769526C1 |
| Устройство для распрямления трубчатых заготовок для картонных коробок | 1990 |
|
SU1828430A3 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| УСТРОЙСТВО И СПОСОБ ПОСТФОРМОВОЧНОГО ОХЛАЖДЕНИЯ, ПРЕДУСМАТРИВАЮЩИЕ ПОВОРОТ И ПОПЕРЕЧНОЕ ПЕРЕМЕЩЕНИЕ | 2003 |
|
RU2294832C2 |
| ЗАХВАТЫВАЮЩЕЕ БУРИЛЬНУЮ ШТАНГУ УСТРОЙСТВО | 2014 |
|
RU2660697C2 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ПОДДОНОВ | 2018 |
|
RU2756105C2 |
Изобретение относится к балансирному пневматическому манипулятору. Манипулятор содержит опорное устройство с узлом, выполненным с возможностью вращения вокруг вертикальной оси, шарнирный параллелограммный механизм с рукой, совершающей маховые движения, пневматический линейный привод, действующий между поворотным узлом и шарнирным параллелограммным механизмом, заставляя руку поворачиваться вокруг оси колебаний, салазки, соединенные с приводом и установленные с возможностью скольжения на поворотном узле посредством первых прямолинейных направляющих средств, проходящих в первом заданном направлении, вторые прямолинейные направляющие средства, выполненные за одно целое с салазками и проходящие во втором направлении, перпендикулярном первому направлению, и зацепляющий элемент, установленный на руке и выполненный с возможностью зацепления со вторыми направляющими средствами. Изобретение обеспечивает постоянную балансировку манипулятора во всех диапазонах перемещений привода, что способствует точным движениям инструмента, совмещенного с манипулятором, а также манипулятор отличается исключительной устойчивостью, безопасностью и простотой использования. 10 з.п. ф-лы, 9 ил.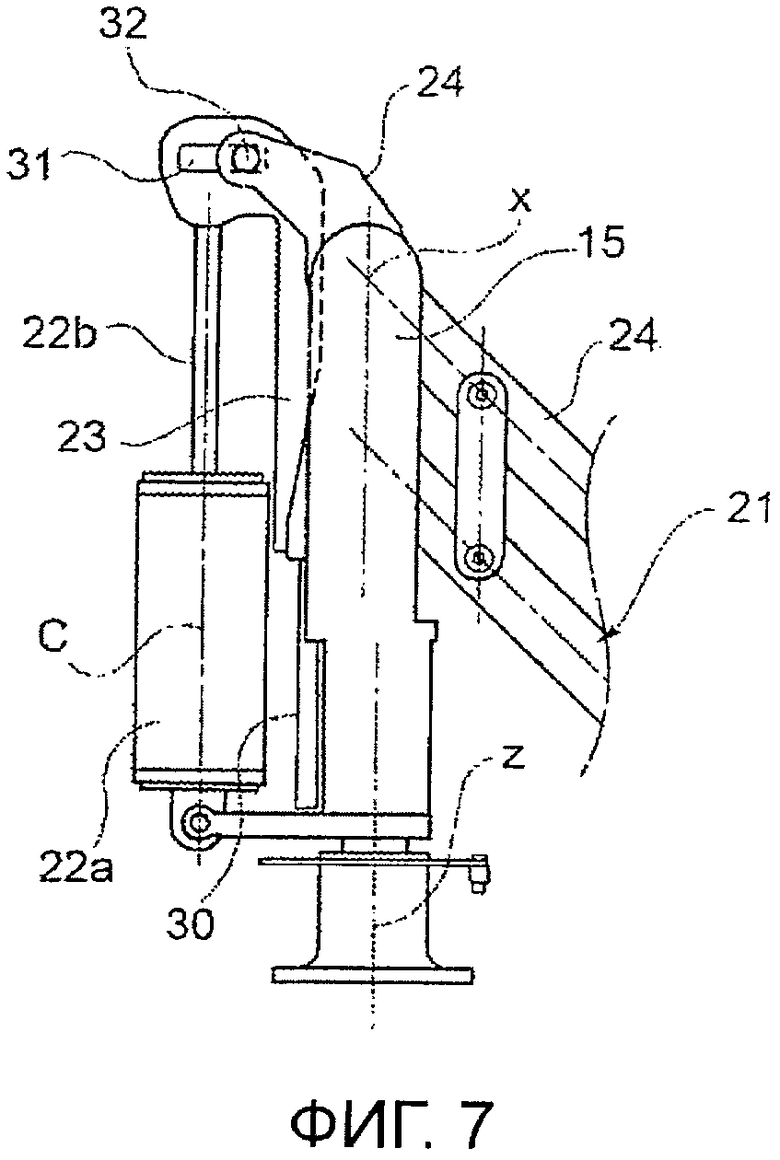
1. Балансирный пневматический манипулятор, характеризующийся тем, что он содержит:
- опорное устройство (11), включающее в себя узел (13), способный поворачиваться вокруг вертикальной оси (z);
- шарнирный параллелограммный механизм (21), включающий в себя руку (24) с маховыми движениями, соединенную с возможностью поворота с узлом (13) для поворота вокруг горизонтальной оси (х) колебаний;
- по меньшей мере один пневматический линейный привод (22), действующий между поворотным узлом (13) и шарнирным параллелограммным механизмом (21), заставляя руку (24) поворачиваться вокруг оси (х) колебаний,
- салазки (23), соединенные с приводом (22) и установленные с возможностью скольжения на поворотном узле (13) посредством первых прямолинейных направляющих средств (30), проходящих в первом заданном направлении (с);
- вторые прямолинейные направляющие средства (31), выполненные за одно целое с салазками (23) и проходящие во втором направлении, перпендикулярном первому направлению;
- зацепляющий элемент (32, 33), установленный на руке (24) с маховыми движениями и выполненный с возможностью зацепления со вторыми направляющими средствами (31).
2. Манипулятор по п.1, характеризующийся тем, что зацепляющий элемент (32, 33) содержит роликовые средства (33), которые установлены с возможностью вращения вокруг оси (35), составляющей одно целое с рукой (24) с маховыми движениями, и которые имеют возможность катиться вдоль вторых прямолинейных направляющих средств (31) салазок (23).
3. Манипулятор по п.1, характеризующийся тем, что вторые направляющие средства (31) содержат по меньшей мере один паз (31a, 31b).
4. Манипулятор по п.2, характеризующийся тем, что вторые направляющие средства (31) содержат по меньшей мере один паз (31a, 31b).
5. Манипулятор по п.3, характеризующийся тем, что вторые направляющие средства содержат пару параллельных пазов (31а, 31b), разнесенных между собой в направлении, перпендикулярном второму направлению.
6. Манипулятор по п.4, характеризующийся тем, что вторые направляющие средства содержат пару параллельных пазов (31а, 31b), разнесенных между собой в направлении, перпендикулярном второму направлению.
7. Манипулятор по п.2, характеризующийся тем, что вторые направляющие средства содержат пару параллельных пазов (31а, 31b), разнесенных между собой в направлении, перпендикулярном второму направлению.
8. Манипулятор по п.7, характеризующийся тем, что роликовые средства содержат цилиндрический ролик (33), имеющий возможность катиться в обоих пазах (31а, 31b).
9. Манипулятор по любому из пп.1-8, характеризующийся тем, что первые направляющие средства проходят в вертикальном направлении, а вторые направляющие средства проходят в горизонтальном направлении.
10. Манипулятор по любому из пп.1-8, характеризующийся тем, что салазки (23) содержат по меньшей мере один жесткий L-образный элемент, длинная секция которого соединена с первыми направляющими средствами (30), а короткая секция которого проходит перпендикулярно длинной секции и образует вторые направляющие средства (31).
11. Манипулятор по п.9, характеризующийся тем, что салазки (23) содержат по меньшей мере один жесткий L-образный элемент, длинная секция которого соединена с первыми направляющими средствами (30), а короткая секция которого проходит перпендикулярно длинной секции и образует вторые направляющие средства (31).
| CN 101234486 B, 15.09.2010;CN 201220417 Y, 15.04.2009;US 5613419 A1, 25.03.1997;JP 07-285092 A, 31.10.1995;SU 1202863 A, 07.01.1986;SU 1648888 A1, 15.05.1991. |

