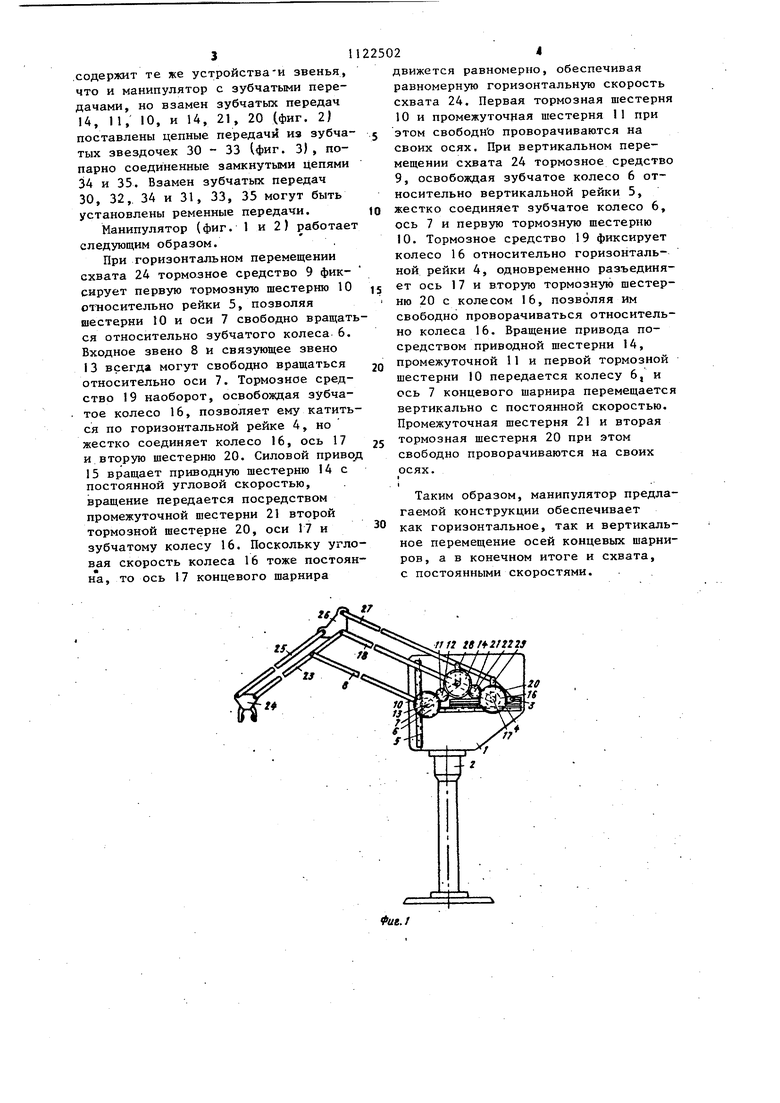
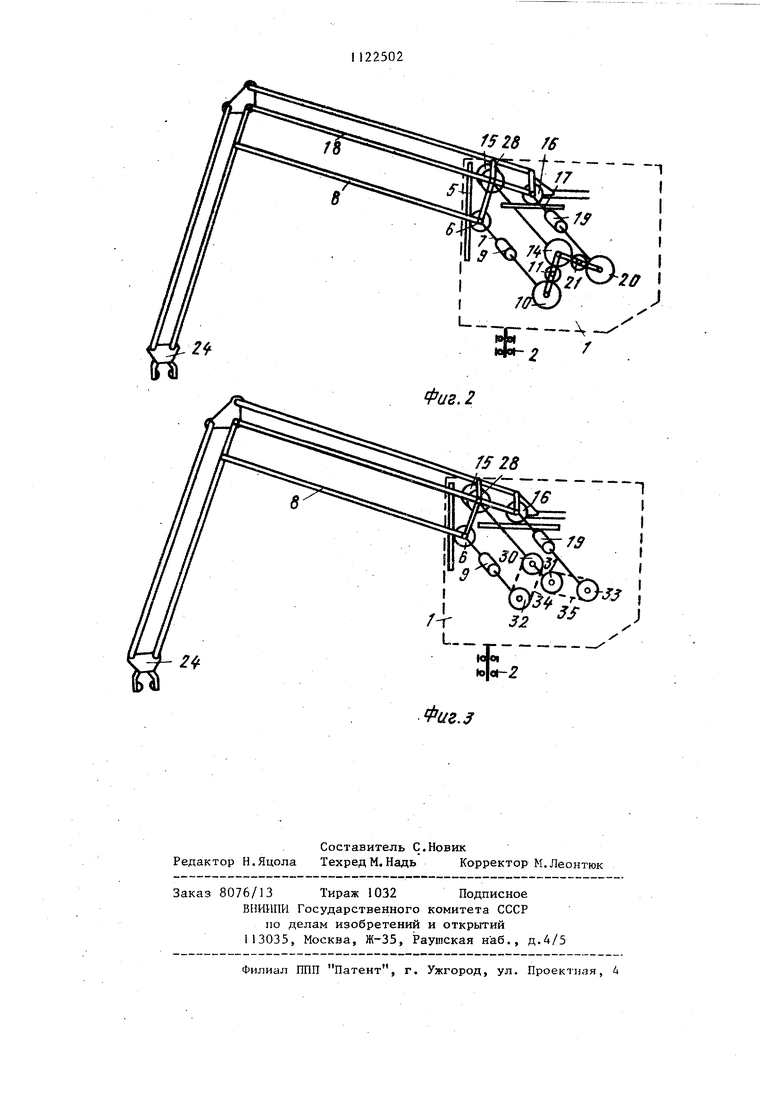
1 Изобретение относится к машиностроению, а именно к манипуляторам предназначенным для перемещения грузов. Известен манипулятор, содержащий установленный на поворотной колонне корпус, в котором одним концом .закреплено звено руки в виде шарнирно соединенных между собой элементов параллелограммного механизма,при этом на другом конце звена закреплен схват, передающими элементами кинематической цепи связанный с силовым приводом, а также тормозные шестерни, посаженные на ось каждого из концевых шарниров параллелограммного механизма с возможностью их взаимодействия с приводны элементом Cl3Недостатком известного манипулятора является то, что его параллело раммный механизм и кинематическая цепь задают схвату вертикальную или горизонтальную скорость, завися щую от взаимного расположения их звеньев, причем различие в величина скоростей может быть значительным. Цель изобретения - повышение точ ности позиционирования схвата путем кинематический независимого горизонтального и вертикального перемещений схвата. I Цель достигается тем, что манип лятор, содержащий установленный на поворотной колонне корпус, в которо одним концом закреплено звено руки в виде шарнирно соединенных между собой элементов параллелограммного механизма, при этом на другом конце звена закреплена схват, пере дающими элементами кинематической цепи связанный с силовым приводом, а также тормозные шестерни, посаже ные на ось каждого из концевых шарниров параллелограммного механи ма с возможностью их взаимодействи с приводным элементом, снабжен двумя дополнительными промежуточны ми шестернями, а силовой привод жестко связан с одним элементом параллелограммного механизма, пере дающие элементы кинематической цепи выполнены в виде шестерен одинакового диаметра, а каждая дополнительная промежуточная шестерн установлена с возможностью взаимодействия с тормозной шестерней и с шестерней кинематической цепи. 2) Кинематические цепи меяоду силовым приводом и осью каждого из концевых шарниров параллелограммного механизма выполнены в виде передач с гибкой связью и с одинаковыми передаточными отношениямиi На фиг. 1 изображен манипулятор с зубчатыми передачами, общий вид; на фиг. 2 - кинематическая схема манипулятора с зубчатыми передачами; на фиг. 3 - кинематическая схема манипулятора с цепными передачами. Манипулятор содержит корпус 1, установленный на поворотной колонне 2. В корпусе 1 закреплено звено руки в виде направляющей 3 горизонтальной 4 и вертикальной 5 зубчатыми рейками. В зацепление с рейкой 5 входит зубчатое колесо 6, посаженное на ось 7 концевого шарнира первого входного звена 8 параллелограммного механизма. На ось 7 посажены также тормозное средство 9 и первая тормозная шестерня 10, которая посредством промежуточной шестерни 11, посаженной на промежуточную ось 12 связующего звена 13, входит в зацепление с приводной шестерней 14привода 5. Аналогично этому в зацепление с горизонтальной рейкой 4 входит зубчатое колесо 16, посаженное на ось 17 концевого шарнира . второго входного звена 18 параллелограммного механизма, на ось 17 посажены тормозное средство 19 и вторая тормозная шестерня 20, которая через промежуточную шестерню 21, посаженную на промежуточную ось 22, входит в зацепление с приводной шестерней К параллелограммному механизму, состоящему из входных звеньев 8 и 18 и связующего звена 13 и выходного звена 23 присоединен схват 24. Для обеспечения поступательного движения схвата 24 служат исполнительные звенья 25 - 29. Испольнительное звено 29, связанное с осью 17 концевого шарнира, имеет направляющий штифт и может перемещаться поступательно и прямолинейно благодаря скольжению конца оси 17 и штифта вдоль прорези направляющей 3. Привод 15жестко установлен на исполнительном звене 28, которое при этом может совершать только поступательное движение. Кинематическая схема манипулятора с цепными передачами фиг. 3)
31
.содержит те же устройстваи звенья, что и манипулятор с зубчатыми передачами, но взамен зубчатых передач 14, 11, 10, и 14, 21, 20 (фиг. 2) поставлены цепные передачи из зубчатых звездочек 30 - 33 (фиг. 3), попарно соединенные замкнутыми цепями 34 и 35. Взамен зубчатых передач 30, 32, 34 и 31, 33, 35 могут быть установлены ременные передачи.
Манипулятор (фиг. 1 и 2) работает следующим образом.
При горизонтальном перемещении схвата 24 тормозное средство 9 фиксирует первую тормозную шестерню 10 относительно рейки 5, позволяя шестерни 10 и оси 7 свободно вращаться относительно зубчатого колеса-6. Входное звено 8 и связующее звено I3 всегда могут свободно вращаться относительно оси 7. Тормозное средство 19 наоборот, освобождая зубчатое колесо 16, позволяет ему катиться по горизонтальной рейке 4, но жестко соединяет колесо 16, ось 17 и вторую шестерню 20. Силовой привод 15 вращает приводную шестерню 14 с постоянной угловой скоростью, вращение передается посредством промежуточной шестерни 21 второй тормозной шестерне 20, оси 17 и зубчатому колесу 16. Поскольку угловая скорость колеса 16 тоже постоянна, то ось 17 концевого шарнира
24
движется равномерно, обеспечивая равномерную горизонтальную скорость схвата 24. Первая тормозная шестерня 10 и промежуточная шестерня 11 при этом свободно проворачиваются на своих осях. При вертикальном перемещении схвата 24 тормозное средство
9,освобождая зубчатое колесо 6 относительно вертикальной рейки 5,
жестко соединяет зубчатое колесо 6, ось 7 и первую тормозную шестерню
10.Тормозное средство 19 фиксирует колесо 16 относительно горизонтальной рейки 4, одновременно разъединябт ось 17 и вторую тормознук) шестерню 20 с колесом 16, позволяя им
свободно проворачиваться относительно колеса 16. Вращение привода посредством приводной шестерни 14,
промежуточной 11 и первой тормозной шестерни 10 передается колесу 6, и ось 7 концевого шарнира перемещается вертикально с постоянной скоростью. Промежуточная шестерня 21 и вторая
тормозная шестерня 20 при этом свободно проворачиваются на своих осях.
Таким образом, манипулятор предлагаемой конструкции обеспечивает как горизонтальное, так и вертикальное перемещение осей концевых шарниров, а в конечном итоге и схвата, с постоянными скоростями.
Фиг.з
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
| Манипулятор | 1984 |
|
SU1192969A1 |
1. МАНИПУЛЯТОР, содержащий установленный на поворотной колонне корпус, в котором одним концом закреплено звено руки в виде шарнирно соединенных между собой элемен тов параллелограммного механизма, при этом на другом конце звена закреплен схват, передающими элементами кинематической цепи связанный .с силовым приводом, а также тормозные шестерни, посаженные на ось каждого из концевых шарниров параллелограммного механизма с возможностью их взаимодействия с приводным элементом, отличающийс я тем, что, с целью повышения точности позиционирования схвата путем кинематически независимого горизонтального и вертикального перемещений схвата, он снабжен двумя дополнительными промежуточными шестернями, а силовой привод жестко Связан с одним элементом параллелограммного механизма, передающие элементы кинематической цепи выполнены в виде шестерен одинакового диаметра, а каждая дополнительная промежуточная шестерня установлена с возможностью взаимодействия с тормозной шестерней и с шестерней кинематической цепи. (Л 2. Манипулятор по п. 1, о т л ичающийся тем, что, кинематические цепи между силовым приводом и осью каждого из концевьк шарниров параллелограммного механизма вьтолнены в виде передач с гибкой связью и с одинаковыми передаточными отношениями.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1980 |
|
SU872253A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
