Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных роботох.
Известен манипулятор, содержаш.ий неподвижное основание, поворотную платформу, вертикальную каретку и две горизонтальные каретки, первая из которых установлена на второй, а также механическую руку, выполненную в виде параллелограммного механизма, направляюшее звено которого шарнирно связано с вертикальной кареткой, а ведуш,ее звено - с первой горизонтальной кареткой через шарнирную опору 1.
Недостатком известного устройства является небольшая величина зоны обслуживания манипулятора, что суш,ественно снижает его технологические возможности.
Цель изобретения - увеличение зоны обслуживания и расширение технологических возможностей.
Поставленная цель достигается тем, что в манипуляторе вертикальная каретка установлена на поворотной платформе, а вторая горизонтальная каретка - на неподвижном основании, причем поворотная платформа расположена над первой горизонтальной кареткой и имеет радиальную прорезь, в которой смонтирована шарнирная опора, контактируюш ая со стенками этой прорези.
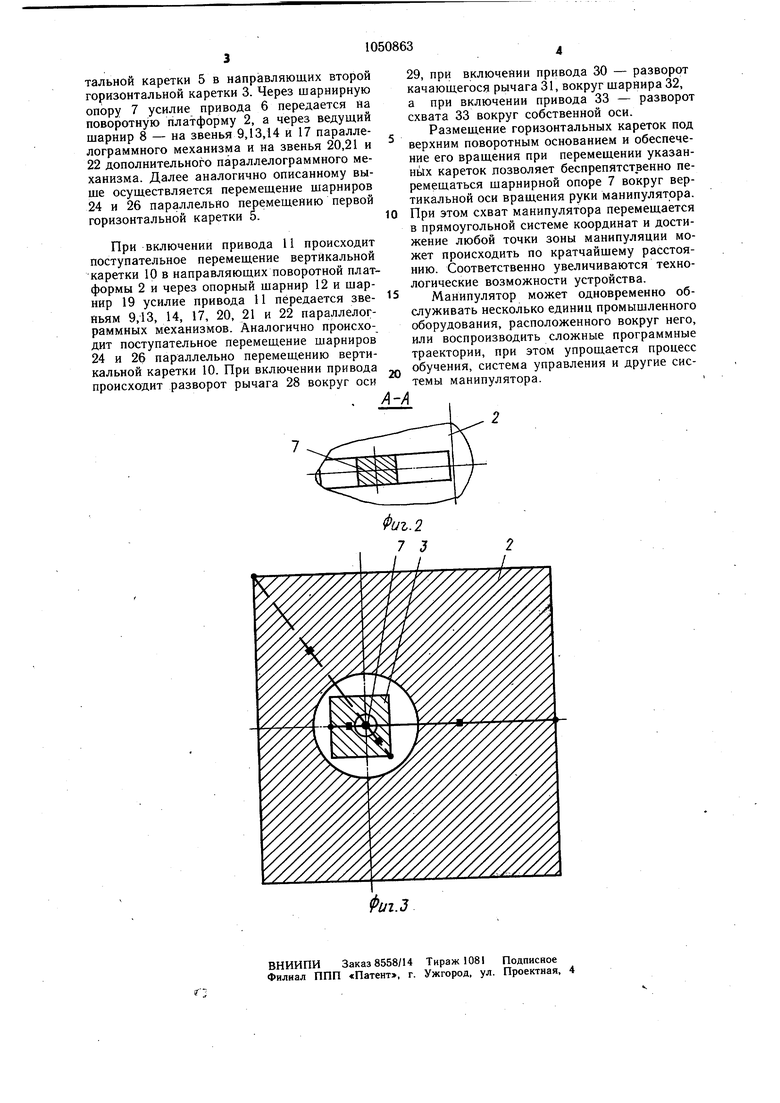
На фиг. 1 изображен предлагаемый манипулятор, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - схема зоны обслуживания манипулятора.
Манипулятор содержит неподвижное основание 1, на котором установлена поворотная платформа 2. Под поворотной платформой 2 расположены одна на другой две горизонтальные каретки, имеюшие возможность перемещения во взаимно перпендикулярных направлениях в горизонтальных плоскостях. Вторая горизонтальная каретка 3 установлена в направляющих неподвижного основания 1, кинематически связана с приводом 4 и имеет возможность поступательного перемещения относительно этого основания (перпендикулярно плоскости чертежа).
Первая горизонтальная каретка 5 смонтирована в направляющих каретки 3 с возможностью ее поступательного перемещения относительно последней (в плоскости чертежа) и кинематически связана с приводом 6
На первой горизонтальной каретке 5 установлена шарнирная опора 7, проходяшая через радиальную лрорезь, выполненную в поворотной платформе 2, контактируюшая с продольными стенками радиальной прорези и связанная через шарнир 8 с ведущим звеном 9 параллелограммного механизма. На поворотной платформе 2 в направляющих расположена вертикальная каретка 10, кинематически связанная с приводом 11, обеспечивающим возможность поступательного перемещения в вертикальной плоскости.
На вертикальной каретке 10 с помощью опорного шарнира 12 установлены звено 13 и направляющее звено 14 параллелограммного механизма, которые шарнирами 15 и 16 соединены с ведущим 9 и ведомым 17
звеньями параллелограммного механизма. Ведущее звено 9 соединено с ведомым звеном 17 шарниром 18. К вертикальной каретке 10 с помощью щарнира 19 прикреплен дополнительный параллелограммный механизм, состоящий из ведущего 20, направляющего 21 ведомого 22 звеньев, скрепленных между собой шарниром 23. Направляющее звено 21 дополнительного параллелограммного механизма шарниром 16 прикреплено к ведомому 17 и направляющему 14 звеньям
параллелограммного механизма. На ведомом звене 17 параллелограммного механизма с помощью щарнира 24 установлен направляющий рычаг 25 схвата, который шарниром 26 подсоединен к ведомому звену 22 дополнительного параллелограммного механизма. На направляющем рычаге 25 смонтирован привод 27, кинематически связанный с поворотным рычагом 28, установленным с помощью оси 29 на направляющем рычаге 25. На поворотном рычаге 28 расположен привод 30, кинематически связанный с качающимся рычагом 31, установленным с помощью щарнира 32 на поворотном рычаге 28. На качающемся рычаге 31 смонтирован привод 33, кинематически связанный со схватом 34, поворотно установленным на ка0 чающемся рычаге 31.
Манипулятор работает следующим образом.
При включении привода 4 происходит поступательное перемещение йторой горизонтальной каретки 3 относительно неподвижного основания 1 (перпендикулярно; плоскости чертежа) и установленных на ней первой горизонтальной каретки 5 и шарнирной опоры 7, которая передает усилие привода 4 на поворотную платформу
0 2 вследствие ее контакта со стенками радиальной прорези, разворачивает ее вокруг вертикальной оси, проходящей через опорный шарнир 12 и щарнир 19. Через шарнир 8 усилие передается на ведущее звено 9 параллелограммного механизма и далее
5 на звенья 13,14 и 17 параллелограммного механизма и на звенья 20,21 и 22 дополнительного параллелограммного механизма. Под действием этого усилия происходит разворот звеньев параллелограммных механизмов вокруг соответствующих шарниров, а точки крепления направляющего рычага 25 схвата (шарниры 24 и 26) перемещаются по прямой, параллельной перемещению второй горизонтальной каретки 3, причем величина и скорость перемещения шарниров
5 24 и 26 связаны с величиной и скоростью перемещения второй горизонтальной каретки 3. При включении привода 6 происходит поступательное перемещение первой горизонтальной каретки 5 в направляющих второй горизонтальной каретки 3. Через шарнирную опору 7 усилие привода 6 передается на поворотную платформу 2, а через ведущий щарнир 8 - на звенья 9,13,14 и 17 параллелограммного механизма и на звенья 20,21 и 22 дополнительного параллелограммного механизма. Далее аналогично описанному выще осуществляется перемещение щарниров 24 и 26 параллельно перемещению первой горизонтальной каретки 5. При включении привода И происходит поступательное перемещение вертикальной каретки 10 в направляющих поворотной платформы 2 и через опорный щарнир 12 и щарнир 19 усилие привода И передается звеньям 9,13, 14, 17, 20, 21 и 22 параллелограммных механизмов. Аналогично происходит поступательное перемещение щарниров 24 и 26 параллельно перемещению вертикальной каретки 10. При включении привода происходит разворот рычага 28 вокруг оси 29, при включении привода 30 - разворот качающегося рычага 31, вокруг щарнира 32, а при включении привода 33 - разворот схвата 33 вокруг собственной оси. Размещение горизонтальных кареток под верхним поворотным основанием и обеспечение его вращения при перемещении указанных кареток позволяет беспрепятственно перемещаться щарнирной опоре 7 вокруг вертикальной оси вращения руки манипулятора. При этом схват манипулятора перемещается в прямоугольной системе координат и достижение любой точки зоны манипуляции может происходить по кратчайщему расстоянию. Соответственно увеличиваются технологические возможности устройства. Манипулятор может одновременно обслуживать несколько единиц промыщленного оборудования, расположенного вокруг него, или воспроизводить сложные программные траектории, при этом упрощается процесс обучения, система управления и другие системы манипулятора.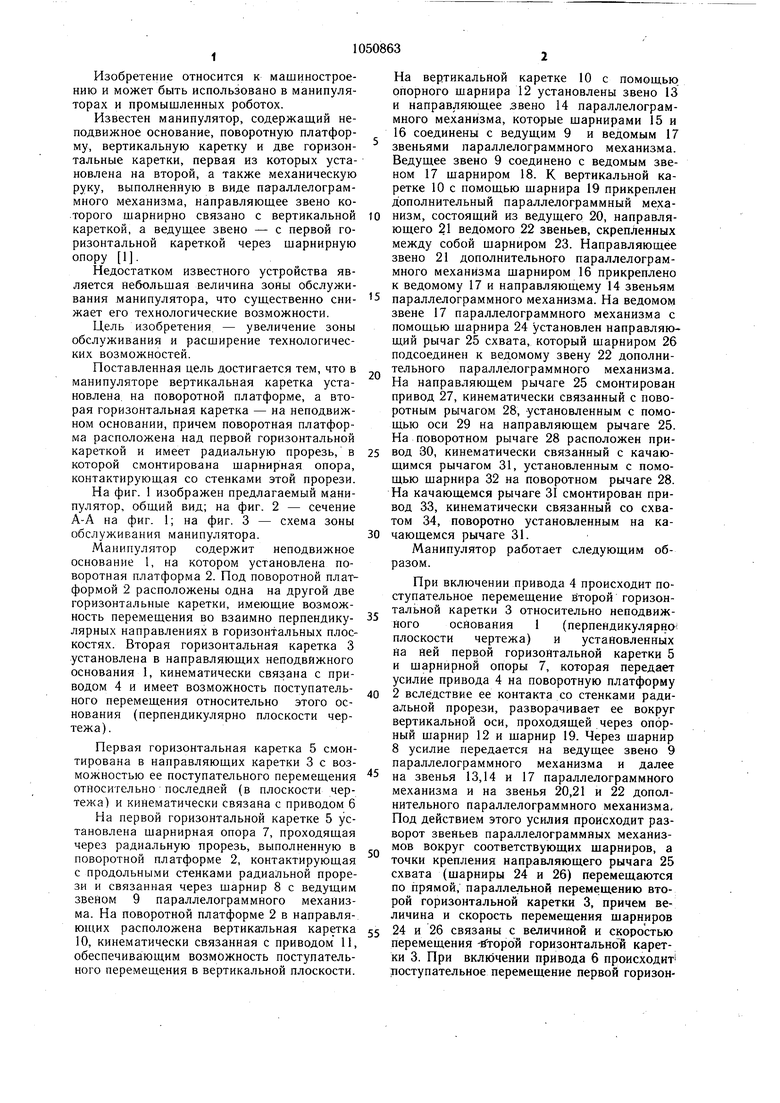
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1977 |
|
SU846267A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| Манипулятор | 1981 |
|
SU1038219A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| Промышленный робот | 1977 |
|
SU837850A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
МАНИПУЛЯТОР, содержащий неподвижное основание, поворотную- платформу, вертикальную каретку и две горизонтальные каретки, первая из которых установлена на второй, а также механическую руку, выполненную в виде параллелограммного механизма, направляющее звено которого щарнирно связано с вертикальной кареткой, а ведущее звено - с первой горизонтальной кареткой через шарнирную опору отличающийся тем, что, с целью увеличения зоны обслуживания и расширения технологических возможностей, вертикальная каретка установлена на поворотной платформе, а вторая горизонтальная каретка - на неподвижном основании, причем поворотная платформа расположена над первой горизонтальной кареткой и имеет радиальную прорезь, в которой смонтирована шарнирная опора, контактирующая со стенками этой прорези.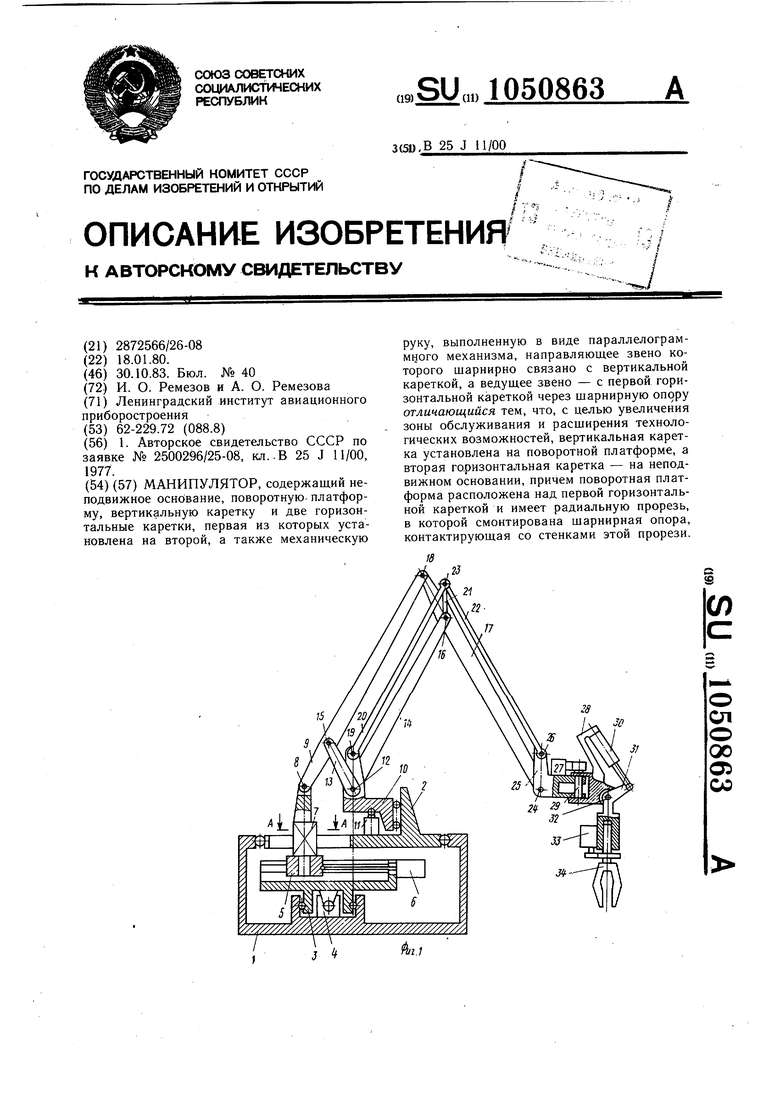
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВОВ "САЗАН ОБЖАРЕННЫЙ В ТОМАТНОМ СОУСЕ" | 2013 |
|
RU2500296C1 |
