УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к области авиационных двигателей. Настоящее изобретение относится, в частности, к обнаружению деформации лопаток вентилятора, например, в результате засасывания турбореактивным двигателем самолета предмета во время полета.
Во время полета посторонние тела или части, которые отделились от турбореактивного двигателя, могут быть втянуты турбореактивным двигателем и привести к повреждениям внутри него. Производственные дефекты также могут привести с течением времени к расслоению лопастей. И самое главное, предмет, сталкивающийся с лопаткой вентилятора, может повредить его.
Для повреждения из-за засасывания турбореактивным двигателем посторонних тел (например, птиц) используется термин «повреждение посторонним предметом» (FOD). Для повреждения из-за засасывания турбореактивным двигателем отделившихся частей (например, заклепок, болтов и т.д.), используется термин «повреждение внутренним предметом» (DOD).
Засасывание посторонних тел (FOD) является главной причиной задержки или отмены полетов, так как, как правило, воздействие не замечается пилотом во время полета, а замечается оно на лопатке только при осмотре самолета непосредственно перед его повторным вылетом.
Известны различные решения для обнаружения наличия FOD или DOD. Эти решения направлены на прогнозирование того, когда следует выполнять осмотр и операции по техническому обслуживанию для улучшения состояния эксплуатационной готовности самолета.
Одно известное решение для обнаружения FOD описано в патенте FR 2937079, принадлежащем заявителю настоящей заявки. Этот патент основан на установке на постоянной основе на двигателе акселерометров и на распознавании характерного профиля волны столкновения с вентилятором в форме волны изменяющихся со временем сигналов, поступающих от таких акселерометров.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на улучшение обнаружения деформации, возникающей вследствие повреждения или столкновений с лопатками вентилятора авиационного двигателя.
Для этого настоящее изобретение обеспечивает систему для обнаружения деформации вентилятора для авиационного двигателя, причем вентилятор содержит ротор, имеющий множество лопаток, выполненных из композитного материала, включающего в себя тканые волокна.
Эта система примечательна тем, что по меньшей мере одно из упомянутых волокон в каждой из упомянутых лопаток является оптоволокном, включающим в себя по меньшей мере одну часть, образующую Брэгговскую решетку, причем система дополнительно содержит приемопередатчик, соединенный с упомянутым оптоволокном и подходящий для отправки оптического сигнала в упомянутое оптоволокно и для приема оптического сигнала из упомянутого оптоволокна, и модуль детектора, который соединен с упомянутым приемопередатчиком, для обнаружения деформации упомянутого вентилятора, когда упомянутый принятый оптический сигнал демонстрирует корреляцию с заданным профилем волны затухающего воздействия на лопатку при определенной частоте вращения.
С помощью этих характеристик можно обнаружить деформацию в результате внутреннего повреждения или в результате столкновения с вентилятором и обнаружить массу постороннего предмета путем анализа сигнала, принятого из оптоволокна. Нет никакой необходимости использовать акселерометры, или емкостные, или оптические, или микроволновые датчики для анализа с помощью так называемого метода хронометража по кончику (tip-timing).
В оптимальном варианте выполнения множество упомянутых волокон по меньшей мере в одной из упомянутых лопаток являются оптоволокнами.
Другими словами, каждая из лопаток имеет множество оптоволокон. В этом случае анализ сигналов, принятых из различных оптоволокон лопатки, позволяет определить место, где произошло столкновение с лопаткой, что, таким образом, позволяет прогнозировать операции по техническому обслуживанию.
В одном варианте выполнения модуль детектора может быть встроен в электронный блок. В этом случае электронный блок может включать в себя упомянутый приемопередатчик, система дополнительно включает в себя оптический соединитель статора с ротором для соединения упомянутого приемопередатчика с упомянутым оптоволокном.
В варианте упомянутый приемопередатчик может быть установлен на роторе, модуль детектора может использоваться для осуществления связи с упомянутым приемопередатчиком с помощью беспроводного соединения через блок связи.
В этом варианте нет необходимости в оптическом соединителе статора с ротором.
Модуль детектора предпочтительно встроен в электронный блок, который может использоваться для хранения информации, относящейся к обнаруженной деформации, для идентификации лопатки и для передачи упомянутой информации о деформации и идентификации системе технического обслуживания.
Предпочтительно обеспечено средство приема для приема упомянутой информации о деформации и идентификации и средство анализа для модального анализа или анализа резонансов, синхронных с частотой вращения двигателя, упомянутой информации о деформации для идентификации модальных параметров, относящихся к каждой лопатке, и для отслеживания изменения упомянутых параметров для обнаружения появления дефектов и их развития на лопатках упомянутого вентилятора.
Изобретение также обеспечивает авиационный двигатель, включающий в себя систему в соответствии с изобретением.
Изобретение также обеспечивает способ контроля вентилятора авиационного двигателя, причем вентилятор содержит ротор, имеющий множество лопаток, выполненных из композитного материала, включающего в себя тканые волокна.
Этот способ контроля примечателен тем, что он содержит этапы, на которых отправляют оптический сигнал по меньшей мере в одно из упомянутых волокон в каждой из упомянутых лопаток, при этом волокно является оптоволокном, принимают оптический сигнал, поступающий из упомянутого оптоволокна, и коррелируют упомянутый принятый оптический сигнал и заданным профилем волны для затухающего воздействия на лопатку при определенной частоте вращения для обнаружения деформации упомянутого вентилятора.
В оптимальном варианте выполнения способ может также включать в себя определение массы упомянутого постороннего предмета и места упомянутого столкновения упомянутого постороннего предмета с упомянутым вентилятором путем анализа упомянутого принятого оптического сигнала. Он может также включать в себя этап, на котором выполняют модальный анализ или анализ резонансов, синхронных с частотой вращения двигателя, каждого из упомянутых сигналов для идентификации модальных параметров, относящихся к каждой лопатке, и для отслеживания изменений упомянутых модальных параметров для обнаружения появления дефектов и их развития на упомянутых лопатках.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие характеристики и преимущества настоящего изобретения становятся понятны из нижеследующего описания со ссылками на прилагаемые чертежи, которые показывают вариант выполнения, не имеющий ограничительного характера.
На чертежах:
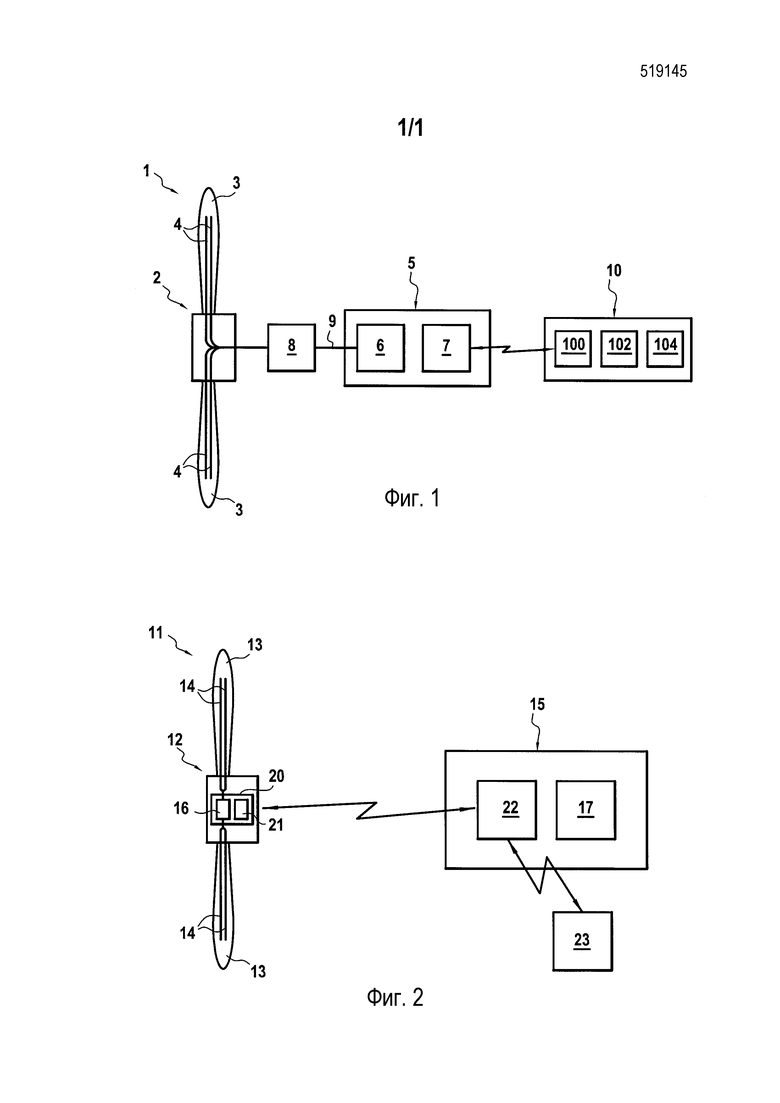
фиг. 1 является схемой системы в первом варианте выполнения изобретения; и
фиг. 2 является схемой системы во втором варианте выполнения изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 является схемой системы, включающей в себя вентилятор 1 для авиационного двигателя в первом варианте выполнения изобретения.
Вентилятор 1 содержит ротор 2, имеющий лопатки 3.
В качестве примера, двигатель является турбореактивным двигателем, содержащим вентилятор 1, компрессор низкого давления, компрессор высокого давления, камеру сгорания, турбину высокого давления и турбину низкого давления. В варианте выполнения вентилятор 1 является бестуннельным вентилятором (также известным как винтовентилятор).
Лопатки (лопасти) 3 выполнены из тканого композитного материала. Поэтому они включают в себя тканые волокна. Специалисту в данной области техники известно, как выполнить такую лопатку (лопасть), поэтому создание лопатки (лопасти) подробно здесь не описано. Кроме того, специалисту в данной области техники известны методы, позволяющие встроить оптоволокно во время плетения, чтобы позволить контролировать температуру композитного материала во время его введения в пресс-форму. Поэтому в вентиляторе 1 лопатки 3 включают в себя оптоволокно 4.
Система также включает в себя электронный блок 5, в свою очередь содержащий приемопередатчик 6 и модуль 7 детектора. Система предпочтительно взаимодействует с процессорным блоком 10 на земле с помощью передачи типа SATCOM или GSM, используя систему передачи данных воздушного судна.
Приемопередатчик 6 соединен с оптоволокном 4 лопаток 3 через оптоволокно 9 и соединитель 8 для обеспечения передачи между ротором и статором. Приемопередатчик 6 обычно содержит лазерный излучатель и фотодиодный приемник и может использоваться для отправки оптического сигнала в оптоволокно 4 и для приема оптического сигнала из оптоволокна 4 через соединитель 8 и оптоволокно 9.
Число, расположение и тип соединения с оптоволокном 4 в лопатке 3 могут быть выбраны при проектировании лопатки 3 в зависимости от зон, которые должны контролироваться. Например, в хвостовиках лопаток оптоволокно 4 может быть мультиплексировано.
Модуль 7 детектора является подходящим для отправки оптических сигналов посредством приемопередатчика 6 и для анализа оптических сигналов, принятых приемопередатчиком 6.
В качестве примера, анализ сигналов может быть основан на использовании Брэгговских решеток в качестве детектора движения. Не давая точное определение Брэгговской решетки, далее следует интуитивная идея принципа использования этой технологии. Брэгговская решетка является нанесенной с помощью светового излучения решеткой в оптоволокне, и, говоря проще, часть оптоволокна была подвергнута модификации для придания ей новых свойств. Влияние физического явления, которое должно быть измерено (здесь внутреннее повреждение лопатки из-за расслоения или движение, вызванное столкновением), изменяет свойства решетки и, таким образом, изменяет спектр сигнала.
Так как столкновение с посторонним предметом приводит по меньшей мере к временному перемещению или деформации лопаток 3, можно понять, что анализ принятых оптических сигналов позволяет обнаружить такое столкновение. То же самое верно для внутреннего повреждения, приводящего к другому деформационному отклику. Точнее говоря, анализ принятых оптических сигналов позволяет:
- идентифицировать лопатку(ки) 3, которая(ые) являются поврежденными/были повреждены или с которыми было столкновение;
- определить место столкновения и повреждения на лопатке 3;
- оценить массу постороннего предмета, с которым произошло столкновение; и
- идентифицировать лопатку (на практике пару лопаток) для замены.
Обнаружение столкновения или повреждения данной лопатки основано на автоматическом распознавании характерной формы волны сигнала собственных колебаний в результате затухающего воздействия, поступающего от Брэгговской решетки в этой лопатке. Модуль 7 детектора принимает информацию и о частоте вращения двигателя (например, традиционно, с помощью хронометража по кончику), а также сигналы деформации лопатки, если таковые имеются, вытекающие просто из модификации оптических свойств оптоволокна(он), присутствующих в лопатке, под действием столкновения или повреждения. Для выполнения обнаружения модуль детектора включает в себя корреляционное средство для корреляции этих сигналов деформации с ранее сохраненным заранее определенным профилем волны затухающего воздействия на лопатку, вращающуюся с рассматриваемой частотой. Как раскрыто, например, в патенте FR 2937079, заданный профиль волны состоит из псевдо-вейвлета, имеющего осциллирующую форму волны и амплитуду, которая начинается с нуля, которая увеличивается в течение короткого промежутка времени до максимальной амплитуды, и затем уменьшается, постепенно возвращаясь к нулю. Таким образом, любой сигнал, показывающий корреляцию между сигналом деформации и профилем волны столкновения, является показателем столкновения с вентилятором, независимо от того, почувствовал ли столкновение пилот. Местоположение лопатки, затронутой столкновением или повреждением, определяется просто путем идентификации Брэгговской решетки, которая показывает сигнал, возникающий в результате деформации.
Когда лопатка имеет множество оптоволокон, как упоминалось выше, определяется местоположение зоны столкновения или повреждения на самой лопатке путем идентификации, на какое волокно было оказано воздействие.
Масса оценивается на основании энергии столкновения и скорости постороннего предмета, который столкнулся с лопаткой. Энергия столкновения получается путем вывода с помощью предварительной модели упомянутой энергии как функции максимальной деформации лопатки (соответствующий вышеупомянутой максимальной амплитуде затухающего сигнала столкновения), а скорость предмета относительно лопатки получается с помощью скорости воздушного судна и частоты вращения двигателя (полагая, что скорость предмета относительно лопатки равна скорости воздушного судна, что верно в первом приближении).
Наконец, лопатка для проверки идентифицируется просто путем применения порогового значения к ранее обнаруженным сигналам, чтобы оставить только те, которые являются действительно значимыми и которые являются результатом столкновения, которое может привести к поломке двигателя. Это делается потому, что лопатка, с которой произошло столкновение, необязательно повреждена и поэтому должна быть заменена. В противоположность этому, если лопатка демонстрирует появление трещины или повреждение, которое может привести к отслоению, которое увеличивается с увеличением числом оборотов, эта лопатка, естественно, должна быть снята (для утилизации или для ремонта) и заменена как часть пары, то есть вместе с противоположной лопаткой, потому что их статические моменты очень близки.
Вышеупомянутая информация сохраняется электронным блоком 5, который может быть встроен в конкретный блок, или же, так как обработка на борту ограничена сигналами, возникающими в результате деформаций, может быть частью существующего блока, такого как блок контроля технического состояния двигателя (EMU), и затем передается на землю системе технического обслуживания или процессорному блоку 10 для дополнительной обработки.
Процессорный блок 10 включает в себя средство 100 приема, средство 102 анализа и средство 104 хранения типа базы данных. Средство приема выполнено с возможностью принимать сигналы, возникающие в результате деформаций, отправленные бортовым модулем 7 детектора электронного блока 5, поэтому этот блок, естественно, должен быть обеспечен соответствующим средством передачи. После приема сигналов средство анализа применяет модальный анализ к каждому из сигналов для идентификации модальных параметров, относящихся к каждой лопатке, с которой было столкновение. Модальный анализ (обычно типа Прони или эквивалентного типа) используется для определения резонансной частоты и затухания для каждой деформации. Средство анализа затем переходит к проверке модальных параметров, идентифицированных для каждой лопатки перед сохранением их в базе данных, относящихся к вентилятору 1. Средство анализа также выполнено с возможностью отслеживать изменения в модальных параметрах, следующих из столкновения (псевдорезонансные частоты) или из реакции лопатки на гармоническое возбуждение (резонансные частоты, синхронизированные на величине, кратной частоте вращения двигателя) для обнаружения возможных изменений (например, смещения частоты), которые свидетельствуют о развивающемся повреждении в лопатках вентилятора. В частности это средство анализа сравнивает модальные параметры с базой данных исправных лопаток для оценки затухания и/или сдвигов частоты. Это сравнение предпочтительно выполняется от столкновения к столкновению для псевдорезонансных частот, или от цикла к циклу двигателя для синхронных резонансов (например, используя алгоритм контроля тенденций) для анализа изменений в модальных параметрах, числа столкновений и, возможно, других характеристик, относящихся к столкновениям. Таким образом, сдвиг, который является небольшим и прогрессирующим, свидетельствует о том, что дефект изменяется, в то время как внезапное изменение относительно опорного исправного состояния свидетельствует о внезапном появлении дефекта. Когда дефект обнаружен, средство 102 анализа генерируют служебное сообщение или предупреждение для двигателя, которое включает в себя данные, идентифицирующие дефектную лопатку(ки).
В качестве примера, электронный блок 5 представляет собой аппаратную архитектуру компьютера и содержит, в частности, микропроцессор, энергонезависимую память и энергозависимую память. В этом случае модуль 7 детектора может соответствовать микропроцессору, выполняющему компьютерную программу, сохраненную в энергонезависимой памяти, используя энергозависимую память.
Электронный блок 5 может предназначаться специально для контроля лопаток 3 и обнаружения их деградации, если таковая имеется. В одном варианте электронный блок 5 может выполнять другие функции отслеживания и/или управления для двигателя.
Фиг. 2 показывает систему, включающую в себя вентилятор 11 для авиационного двигателя во втором варианте выполнения изобретения. Элементы, которые идентичны или аналогичны элементам системы по фиг. 1, обозначены теми же самыми номерами ссылочных позиций плюс 10, и они не будут вновь описаны подробно.
Таким образом, вентилятор 11 содержит ротор 12, имеющий лопатки 13, включающие в себя оптоволокно 14, и система включает в себя электронный блок 15, включающий в себя модуль 17 детектора.
Система также включает в себя вспомогательный электронный блок 20, установленный на роторе 12. Электронный блок 20 включает в себя приемопередатчик 16, соединенный с оптоволокном 14, и блок 21 связи, который может использоваться для осуществления связи по беспроводному соединению (например, линии радиосвязи) с блоком 22 связи электронного блока 15. Блок 22 связи может также обеспечивать соединение с удаленным блоком 23 процессора на земле, имеющим функцию выполнения модального анализа и отслеживания модальных параметров, которые следуют из него, для обнаружения отклонений в их изменении, что выявляет дефекты в лопатках вентилятора, для выдачи служебного предупреждения для двигателя.
По сравнению с вариантом выполнения по фиг. 1 система по фиг. 2 не требует оптического соединителя статора с ротором, так как приемопередатчик 16 установлен на роторе.
Вентилятор авиационного двигателя содержит ротор, имеющий множество лопаток из композитного материала, включающего тканые волокна, и систему для обнаружения деформации в результате столкновения тела с вентилятором. В каждой из лопаток по меньшей мере одно из волокон является оптоволокном, включающим в себя часть, образующую Брэгговскую решетку. С оптоволокном соединен приемопередатчик, подходящий для отправки оптического сигнала в оптоволокно и приема оптического сигнала в ответ из оптоволокна. С приемопередатчиком соединен модуль детектора, обеспечивающий обнаружение деформации упомянутого вентилятора, когда принятый оптический сигнал демонстрирует корреляцию с заданным профилем волны затухающего воздействия на лопатку при определенной частоте вращения. При обнаружении деформации, вызванной столкновением тела с вентилятором, отправляют оптический сигнал по меньшей мере в одно оптоволокно каждой из лопаток, принимают оптический сигнал, поступающий из оптоволокна, и обеспечивают обнаружение деформации вентилятора в случае, если принятый оптический сигнал демонстрирует корреляцию с заданным профилем волны затухающего воздействия на лопатку при определенной частоте вращения. Другое изобретение группы относится к авиационному двигателю, содержащему такой вентилятор. Группа изобретений позволяет упростить обнаружение повреждений композитных лопаток вентилятора, вызванных столкновением с посторонними предметами. 3 н. и 11 з.п. ф-лы, 2 ил.
1. Вентилятор (1, 11) для авиационного двигателя, содержащий ротор (2, 12), имеющий множество лопаток (3, 13), выполненных из композитного материала, включающего в себя тканые волокна, и систему для обнаружения деформации в результате столкновения тела с упомянутым вентилятором, причем вентилятор отличается тем, что по меньшей мере одно из упомянутых волокон в каждой из упомянутых лопаток (3, 13) является оптоволокном (4, 14), включающим в себя по меньшей мере одну часть, образующую Брэгговскую решетку, причем вентилятор дополнительно содержит приемопередатчик (6, 16), соединенный с упомянутым оптоволокном (4, 14) и подходящий для отправки оптического сигнала в упомянутое оптоволокно (4, 14) и для приема оптического сигнала в ответ из упомянутого оптоволокна (4, 14), и модуль (7, 17) детектора, соединенный с упомянутым приемопередатчиком, для обнаружения деформации упомянутого вентилятора (1, 11), когда упомянутый принятый оптический сигнал демонстрирует корреляцию с заданным профилем волны затухающего воздействия на лопатку при определенной частоте вращения.
2. Вентилятор по п. 1, в котором столкновение упомянутого тела с упомянутым вентилятором является повреждением посторонним предметом (FOD) или повреждением внутренним предметом (DOD).
3. Вентилятор по п. 2, в котором упомянутый модуль детектора является подходящим для определения массы упомянутого тела путем анализа принятого оптического сигнала.
4. Вентилятор по п. 3, в котором множество упомянутых волокон в каждой из упомянутых лопаток (3, 13) являются оптоволокнами (4, 14).
5. Вентилятор по п. 4, в котором упомянутый модуль детектора является подходящим для определения места столкновения с упомянутым телом путем анализа принятого оптического сигнала.
6. Вентилятор по п. 1, дополнительно включающий в себя оптический соединитель (8) статора с ротором, соединяющий упомянутый приемопередатчик (6) с упомянутым оптоволокном (4).
7. Вентилятор по п. 1, в котором упомянутый приемопередатчик (16) установлен на роторе (12), причем модуль (17) детектора является подходящим для осуществления связи с упомянутым приемопередатчиком (16) посредством беспроводного соединения через блок (22) связи.
8. Вентилятор по п. 1, в котором модуль (7, 17) детектора встроен в электронный блок (5, 15), который является подходящим для хранения информации, относящейся к обнаруженной деформации, для идентификации лопатки и для передачи упомянутой информации о деформации и идентификации системе технического обслуживания.
9. Вентилятор по п. 8, дополнительно включающий в себя средство (100) приема для приема упомянутой информации о деформации и идентификации и средство (102, 104) анализа для применения модального анализа или анализа резонансов, синхронных с частотой вращения двигателя, к упомянутой информации о деформации для идентификации модальных параметров, относящихся к каждой лопатке, и для отслеживания изменений упомянутых параметров для обнаружения появления дефектов и их развития на лопатках упомянутого вентилятора.
10. Авиационный двигатель, включающий в себя вентилятор по п. 1.
11. Способ обнаружения деформации, вызванной столкновением тела с вентилятором (1, 11) авиационного двигателя, причем вентилятор содержит ротор (2, 12), имеющий множество лопаток (3, 13), выполненных из композитного материала, включающего в себя тканые волокна, и систему для обнаружения деформации, причем способ отличается тем, что он содержит этапы, на которых отправляют оптический сигнал по меньшей мере в одно из упомянутых волокон в каждой из упомянутых лопаток (3, 13), при этом волокно является оптоволокном (4, 14), принимают оптический сигнал, поступающий из упомянутого оптоволокна (4, 14), и коррелируют упомянутый принятый оптический сигнал и заданный профиль волны для затухающего воздействия на лопатку при определенной частоте вращения для обнаружения деформации упомянутого вентилятора (1, 11).
12. Способ обнаружения по п. 11, в котором столкновение упомянутого тела с упомянутым вентилятором является FOD или DOD.
13. Способ обнаружения по п. 12, дополнительно включающий в себя этап, на котором определяют массу упомянутого тела и места упомянутого столкновения упомянутого тела с упомянутым вентилятором путем анализа упомянутого принятого оптического сигнала.
14. Способ обнаружения по п. 11, дополнительно включающий в себя этап, на котором выполняют модальный анализ или анализ резонансов, синхронных с частотой вращения двигателя, для каждого из упомянутых сигналов для идентификации модальных параметров, относящихся к каждой лопатке, и для отслеживания изменений упомянутых модальных параметров для обнаружения появления дефектов и их развития на упомянутых лопатках.
| СПОСОБ КОНСЕРВИРОВАНИЯ ПАТИССОНОВ | 2008 |
|
RU2369292C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Устройство для измерения деформаций турбинных лопаток | 1987 |
|
SU1487621A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| FR 2937079 A1, 16.04.2010. | |||

