Область техники
Настоящее изобретение относится к области обнаружения дефектов на объекте и, в частности, предназначено для контроля вращающихся элементов авиационного двигателя.
Предшествующий уровень техники
Существует много технологий с использованием оптических или звуковых процессов для обнаружения дефектов на объекте. Преимуществом этих технологий является возможность их неинтрузивного применения.
Например, в области авиации во время производственных тестов или осмотров лопаток двигателя применяют различные технологии не деструктивного контроля, основанные на использовании тепловизоров. Эти технологии состоят в применении подвижного излучателя тепла для нагрева лопатки и подвижного тепловизора для получения инфракрасного изображения лопатки. Анализ изображения основан на сравнении очень большого числа зон изображения, чтобы обнаружить дефекты в лопатке.
Таким образом, современные технологии требуют осуществления вычислений, которые могут занимать достаточно длительное время, если только не прибегать к помощи исключительно мощных и очень дорогих вычислительных машин.
Кроме того, трудно определить, какую следует выбрать зернистость (то есть, разрешение сравниваемой зоны), не зная, какие дефекты следует искать.
Следовательно, настоящее изобретение призвано предложить способ обнаружения, простой в применении, не требующий сложных вычислений и позволяющий быстро и точно обнаруживать дефекты на объекте или на элементе двигателя, избегая вышеупомянутых недостатков.
Раскрытие изобретения
Объектом настоящего изобретения является способ обнаружения дефектов на объекте, содержащий следующие этапы:
- формируют изображение, характеризующее указанный объект, на основании сигналов, связанных с объектом,
- указанное изображение делят на участки в соответствии с разрешениями с функцией самоадаптации и
- вычисляют расхождения между различными участками для обнаружения анормального участка, указывающего на предпосылки повреждения.
Способ позволяет обнаруживать дефекты практически любых размеров за приемлемый период времени.
Предпочтительно способ содержит фазу подтверждения, включающую в себя сравнение расхождений, связанных с анормальным участком, принадлежащим к последнему изображению, с расхождениями, связанными с этим же анормальным участком, принадлежащим к определенному числу предыдущих изображений указанного объекта.
Это позволяет подтвердить обнаружение дефектов и в то же время избежать ложных тревожных сигналов.
Предпочтительно способ включает в себя:
- генерирование тревожного сигнала высокого или сверхвысокого уровня, если отмечается увеличение расхождений в последних изображениях, и
- генерирование тревожного сигнала среднего уровня, если отмечается, что в последних изображениях расхождения остаются постоянными.
Это позволяет оценить серьезность предпосылки повреждения или дефектов.
Согласно предпочтительному варианту осуществления изобретения, этапы разделения на участки и вычисления различных расхождений включают в себя следующие этапы:
- (al) указанное изображение разбивают на множество текущих участков,
- (а2) вычисляют первые текущие расхождения между каждым текущим участком и соседними текущими участками,
- (а3) проверяют наличие текущего участка, для которого первые текущие расхождения по меньшей мере с первым определенным числом соседних участков указывают на аномалию,
- (а4) в случае подтверждения предыдущего этапа (а3) вычисляют вторые текущие расхождения между указанным текущим участком и удаленными текущими участками,
- (а5) в указанном текущем участке проверяют наличие вторых текущих расхождений, указывающих на аномалию, по меньшей мере со вторым определенным числом удаленных текущих участков,
- (аб) в случае подтверждения предыдущего этапа (а5) указанный текущий участок отмечают как дефектный,
- (а7) зону, перекрывающую указанный дефектный текущий участок, опять делят для получения новых участков, перекрывающих предыдущий дефектный участок, при этом новые участки рассматривают как актуальные текущие участки,
- (а8) повторяют этапы (а2)-(а6) для каждого из новых текущих участков указанной зоны перекрывания,
- (а9) создают маску И в указанной зоне перекрывания между предыдущими дефектными участками и новыми участками, получая таким образом участки меньшего размера, включающие в себя по меньшей мере один дефектный участок, при этом указанные участки меньшего размера рассматривают как актуальные текущие участки,
- (а10) проверяют, превышает ли размер актуального текущего участка заранее определенное разрешение, и
- (a11) в случае подтверждения предыдущего этапа (а10) повторяют предыдущие этапы (а2)-(а10) для каждого актуального текущего участка, в противном случае текущий(ие) дефектный(ые) участок(участки) отмечают как анормальный(ые) участок(участки).
Таким образом, этот способ основан на увеличениях масштаба изображения и на большом числе соответствующих сравнений, позволяющих уменьшить вычислительную нагрузку и не делать преждевременные выводы о размерах дефекта сверх разрешения.
Предпочтительно на этапе (а3) проверяют, не превышают ли первые текущие расхождения первый заранее определенный порог, и на этапе (а5) проверяют, не превышают ли вторые текущие расхождения второй заранее определенный порог.
Это позволяет обнаруживать дефекты с учетом погрешностей, а также возможных контекстуальных различий между удаленными областями.
Предпочтительно способ включает в себя формирование базы данных обучения, в которую записывают нормальные расхождения между различными участками изображения, и на этапе (а3) вычисляют различия между первыми текущими расхождениями и соответствующими нормальными расхождениями, чтобы проверить, не превышают ли они заранее определенный уровень, и на этапе (а5) вычисляют различия между вторыми текущими расхождениями и соответствующими нормальными расхождениями, чтобы проверить, не превышают ли они второй заранее определенный уровень.
Это позволяет учитывать неоднородности, которые могут существовать внутри объекта.
Предпочтительно указанный объект является вращающимся элементом авиационного двигателя.
Действительно, цифровая обработка в соответствии с изобретением не требует сложных вычислений, и поэтому ее можно легко осуществлять при помощи бортовых средств обработки летательного аппарата.
Согласно варианту осуществления, сигналы, связанные с указанным объектом, являются инфракрасными сигналами, поступающими от объекта, поэтому указанное изображение, характеризующее указанный объект, является инфракрасным изображением, отображающим тепловое поле в переходной фазе после нагрева объекта при тепловом воздействии.
Согласно другому варианту осуществления, сигналы, связанные с указанным объектом, являются ультразвуковыми сигналами, поступающими от объекта, поэтому указанное изображение, характеризующее указанный объект, является изображением, отображающим ультразвуковые волны, отражающиеся от объекта.
Объектом изобретения является также система обнаружения дефектов по меньшей мере на одном вращающемся элементе авиационного двигателя, содержащая:
- бортовые средства возбуждения, выполненные с возможностью возбуждения излучения сигналов указанным вращающимся элементом,
- бортовые средства считывания, выполненные с возможностью приема сигналов, поступающих от указанного вращающегося элемента, и
- бортовые средства обработки для осуществления этапов заявленного способа. Согласно первому варианту выполнения системы в соответствии с изобретением, средства возбуждения представляют собой средства нагрева указанного вращающегося элемента двигателя посредством теплового воздействия, и средства считывания являются термографическими средствами для считывания инфракрасного изображения, отображающего тепловое поле в переходной фазе указанного вращающегося элемента.
Согласно второму варианту выполнения системы в соответствии с изобретением, средства возбуждения представляют собой средства излучения ультразвуковых волн, и средства считывания являются средствами приема ультразвуковых волн, отраженных объектом.
Объектом изобретения является также автоматическая система обнаружения дефектов по меньшей мере на одном вращающемся элементе авиационного двигателя, содержащая:
- бортовые средства нагрева указанного вращающегося элемента двигателя посредством теплового воздействия,
- бортовые термографические средства, выполненные с возможностью считывания по меньшей мере одного инфракрасного изображения, отображающего тепловое поле в переходной фазе указанного вращающегося элемента, и
- средства обработки, выполненные с возможностью вычисления расхождений, связанных с составляющей теплового поля, между различными участками указанного изображения с целью обнаружения изменений указанной составляющей теплового поля, указывающих на дефекты на указанном вращающемся элементе.
Таким образом, при каждом полете можно автоматически контролировать вращающиеся элементы двигателя для обнаружения первых признаков усталости. Это позволяет осуществлять предсказательное обслуживание, а не только профилактическое обслуживание, поскольку можно менять вращающиеся элементы, когда они действительно имеют повреждения, что позволяет повысить рентабельность (меньше заменяемых деталей) и безопасность (меньше риска потери лопаток). Анализ осуществляют на дифференциальных измерениях, которые позволяют абстрагироваться от контекста. В частности, осуществление сравнений между близкими в пространстве зонами позволяет избегать проблем, связанных с удаленностью источника тепла или с солнечным освещением.
Предпочтительно, если расхождение, соответствующее текущему участку, является показателем аномалии, средства обработки могут вычислить другие расхождения, меняя компоновку участков и/или уточняя текущий участок сравнения для локализации дефектов.
Это позволяет уменьшить число исследуемых участков и, следовательно, сократить время вычисления и нагрузку вычислительного устройства.
Предпочтительно средства обработки выполнены с возможностью записывать при каждом полете указанные расхождения, связанные с тепловыми полями различных участков, и с возможностью анализа изменения указанных расхождений от полета к полету.
Это позволяет консолидировать результат обнаружения и систематически отслеживать состояние вращающихся элементов от полета к полету.
Предпочтительно система обнаружения содержит базу данных сигнатур деградаций, отображающих различные формы деградаций и состояние их развития, и средства обработки выполнены с возможностью сравнения расхождений, связанных с тепловыми полями участков, имеющих дефекты с указанными сигнатурами деградаций.
Это позволяет определять наиболее вероятный тип дефекта.
Согласно предпочтительному варианту выполнения настоящего изобретения, средства нагрева включают в себя по меньшей мере один нагревательный элемент для борьбы с обледенением, уже существующий на летательном аппарате.
Это позволяет уменьшить полетную массу и контролировать само средство нагрева.
Согласно варианту, средства нагрева выполнены с возможностью нагрева указанного элемента при помощи тепловых импульсов.
Таким образом, вращающийся элемент может нагреваться в течение времени, достаточно короткого, чтобы материал вращающегося элемента не достигал постоянной температуры.
Согласно этому варианту, средства обработки выполнены с возможностью вычисления расхождений между амплитудой теплового поля текущего участка и амплитудами тепловых полей соседних участков.
Согласно другому варианту, средства нагрева выполнены с возможностью нагрева указанного элемента при помощи периодических тепловых волн.
Согласно этому другому варианту, средства обработки выполнены с возможностью вычисления смещения фазы между тепловым полем текущего участка и тепловыми полями соседних участков.
Преимуществом обнаружения по смещению фазы является то, что на него мало влияет удаленность источника тепла или солнечное освещение, так как измеряют не температуру, а смещение фазы.
Предпочтительно вращающийся элемент является лопаткой рабочего колеса указанного двигателя.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания предпочтительных вариантов выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - схематичный вид заявленной системы обнаружения дефектов на объекте;
фиг. 2 - алгоритм, иллюстрирующий различные этапы способа обнаружения согласно предпочтительному варианту осуществления изобретения;
фиг. 3А-3Е - сетки изображения, схематично иллюстрирующие этапы блок-схемы, показанной на фиг. 2;
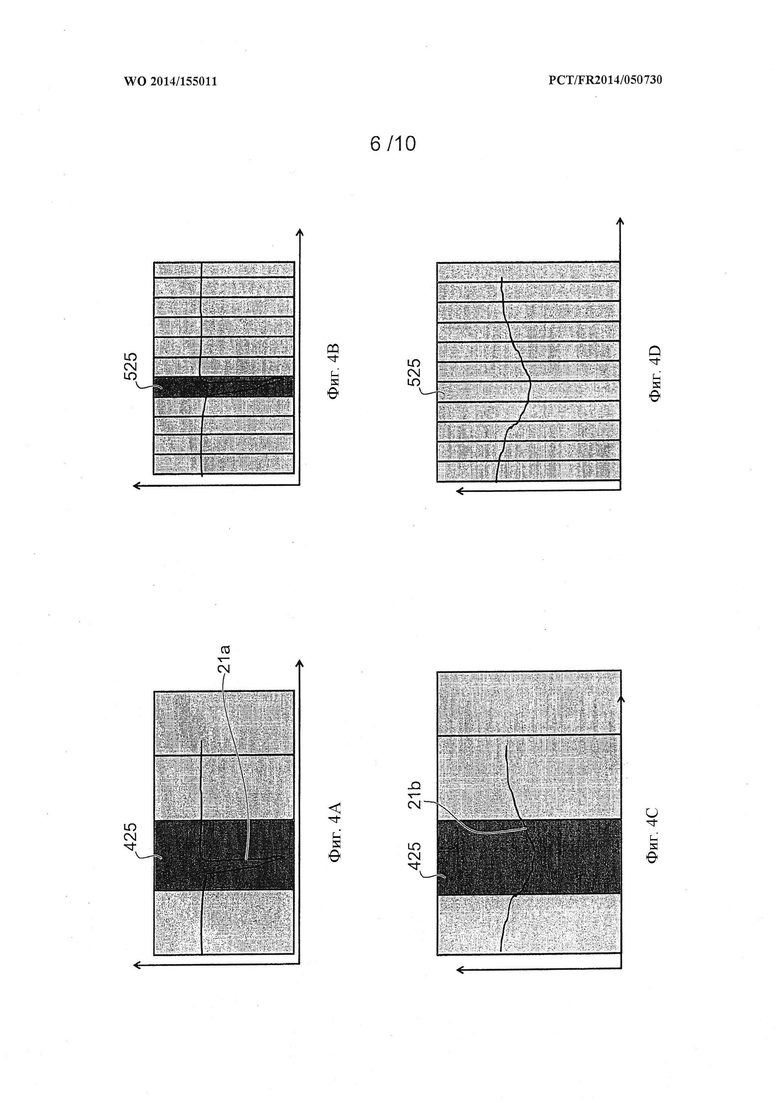
фиг. 4A-4D иллюстрируют обнаружение точечных и протяженных дефектов на различных сетках в соответствии с изобретением;
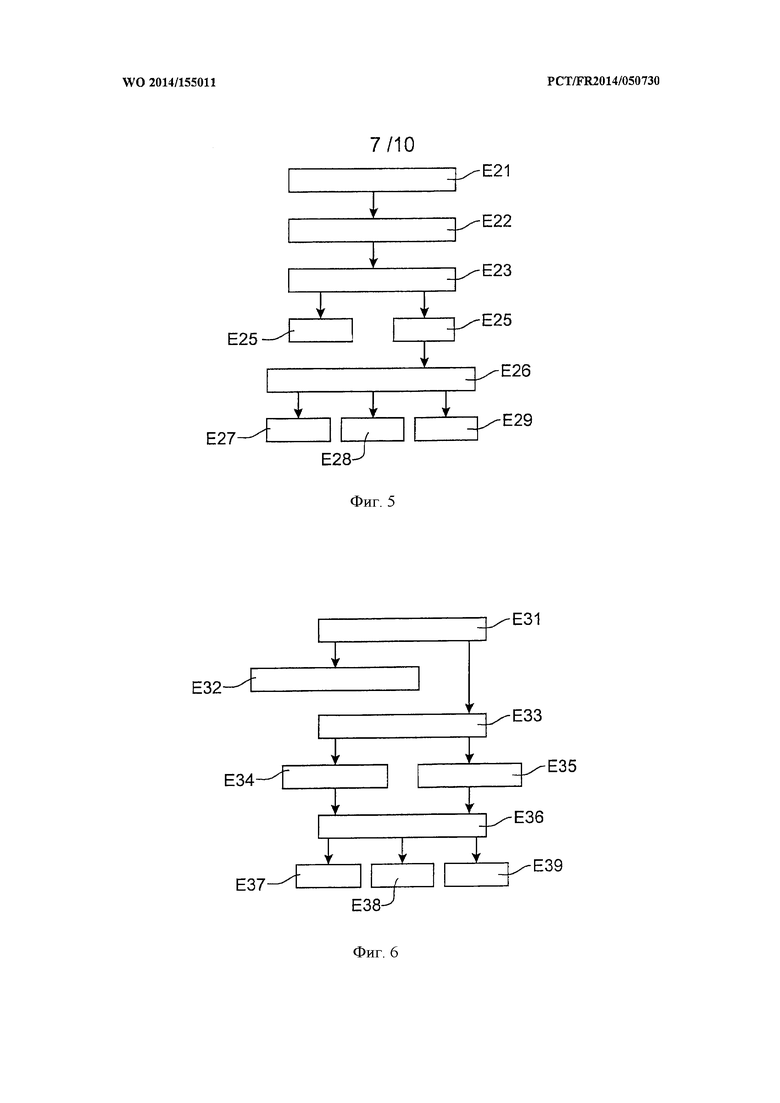
фиг. 5 - алгоритм обнаружения, включающий в себя фазу подтверждения согласно первому варианту осуществления заявленного способа;
фиг. 6 - алгоритм обнаружения, включающий в себя фазу подтверждения согласно второму варианту осуществления заявленного способа;
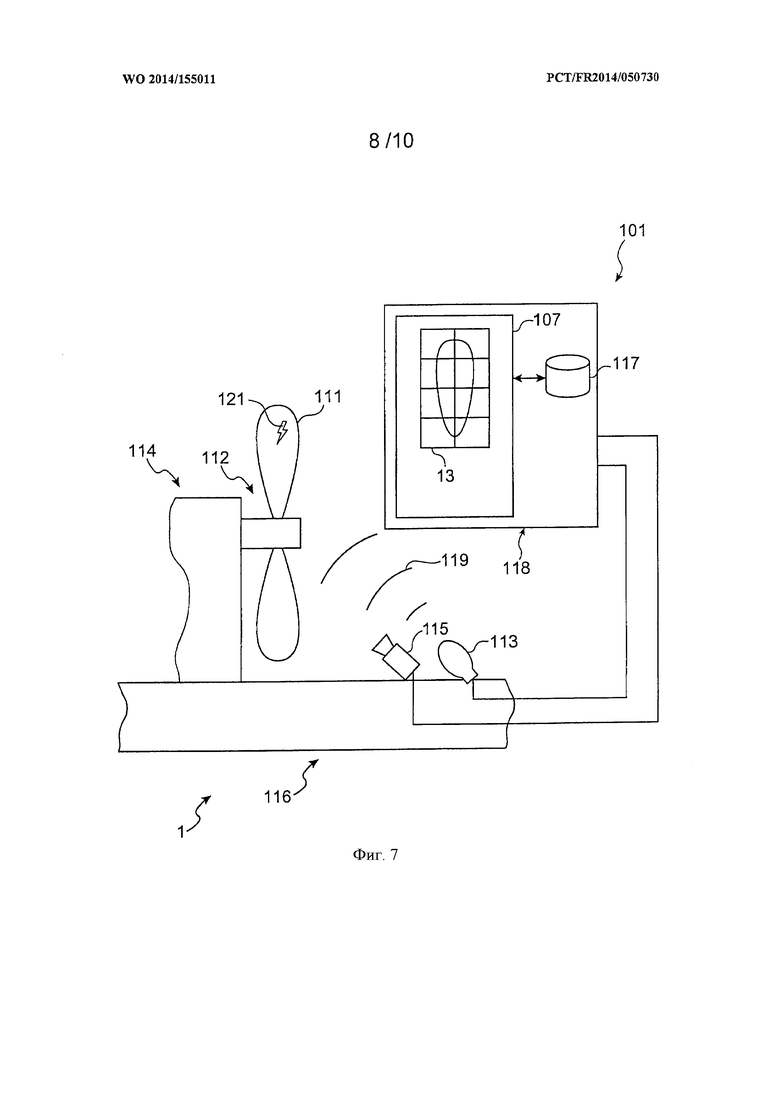
фиг. 7 - схематичный вид системы обнаружения дефектов на вращающемся элементе авиационного двигателя, согласно первому варианту выполнения системы, показанной на фиг. 1;
фиг. 8 - блок-схема этапов обнаружения дефектов на рабочем колесе двигателя при помощи системы, показанной на фиг. 7;
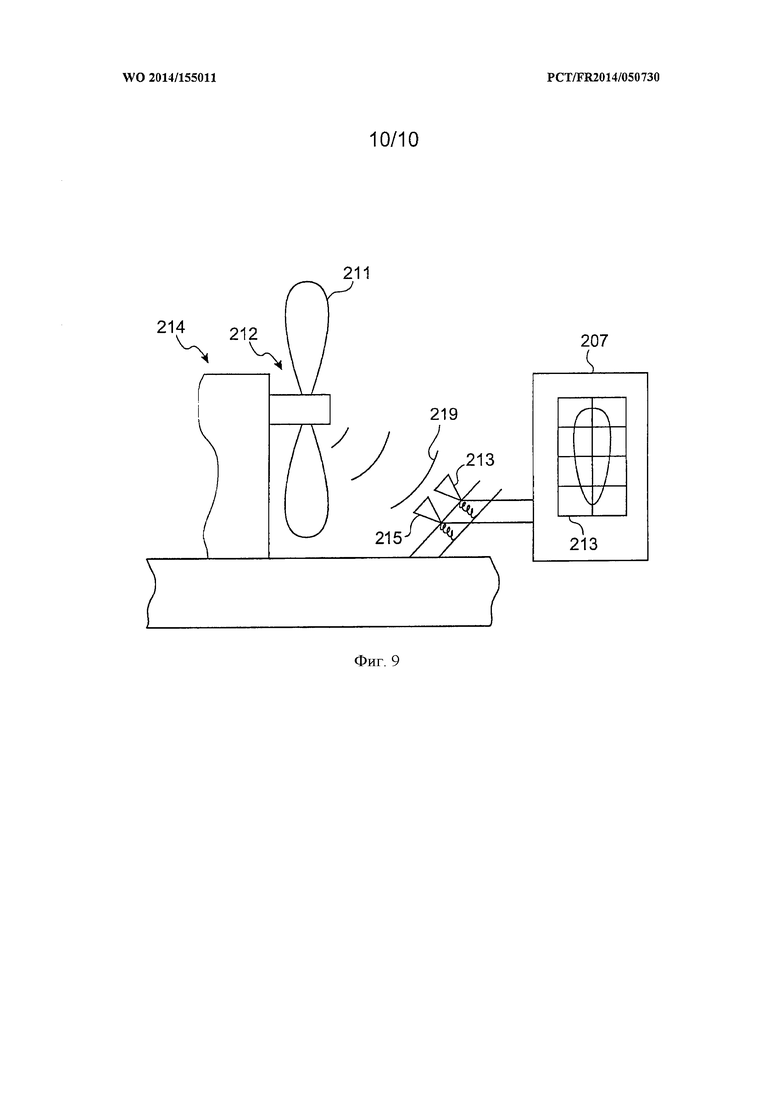
фиг. 9 - схематичный вид системы обнаружения дефектов на вращающемся элементе авиационного двигателя, согласно второму варианту выполнения системы, показанной на фиг. 1.
Осуществление изобретения
Концепция изобретения основана на способе обнаружения дефектов в объекте с использованием изображения объекта и с осуществлением минимального числа сравнений между зонами, размер которых итеративно адаптируют к размеру дефектов.
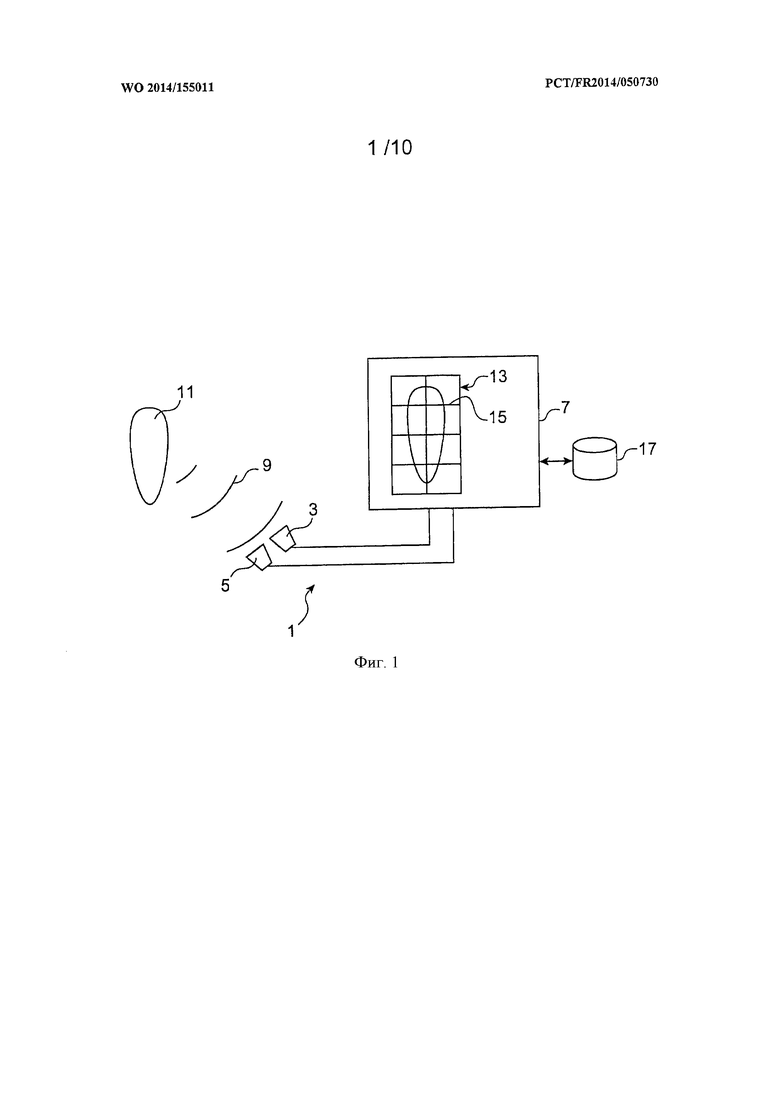
На фиг. 1 схематично представлена заявленная система обнаружения дефектов на объекте.
Система 1 обнаружения содержит средства 3 возбуждения, средства 5 считывания и средства 7 обработки данных.
Средства возбуждения выполнены с возможностью возбуждения излучения сигналов 9 объектом 11, тогда как средства 5 считывания выполнены с возможностью считывания этих сигналов.
Например, средства 3 возбуждения являются средствами нагрева объекта 11 посредством теплового воздействия, и средства 5 считывания являются термографическими средствами для считывания инфракрасного изображения, отображающего тепловое поле в переходной фазе (см. фиг. 7).
Согласно другому примеру, средства 3 возбуждения являются средствами излучения ультразвуковых волн, и средства 5 считывания являются средствами приема ультразвуковых волн, отраженных объектом 11 (см. фиг. 9).
Средства 7 обработки выполнены с возможностью обработки сигналов 9, связанных с объектом, для обнаружения дефектов и генерирования тревожных сигналов.
В частности, средства 7 обработки выполнены с возможностью получения графика или изображения 13, характеризующего объект 11, на основании сигналов 9, связанных с объектом. В данном случае изображение 13 можно определить как отображение объекта 11 в цифровом или математическом смысле этого термина, где каждая точка изображения 13 соответствует антецеденту объекта 11. Так, изображение соответствует, например, оптическому, тепловому или акустическому отображению объекта 11.
Средства 7 обработки выполнены также с возможностью итеративного построения участков изображения 13 в соответствии с разрешениями с функцией самоадаптации, то есть с разрешениями, которые адаптируются к протяженности дефекта.
Кроме того, средства 7 обработки выполнены с возможностью итеративного вычисления расхождений между различными участками с целью выявления анормального участка, указывающего на предпосылки повреждения.
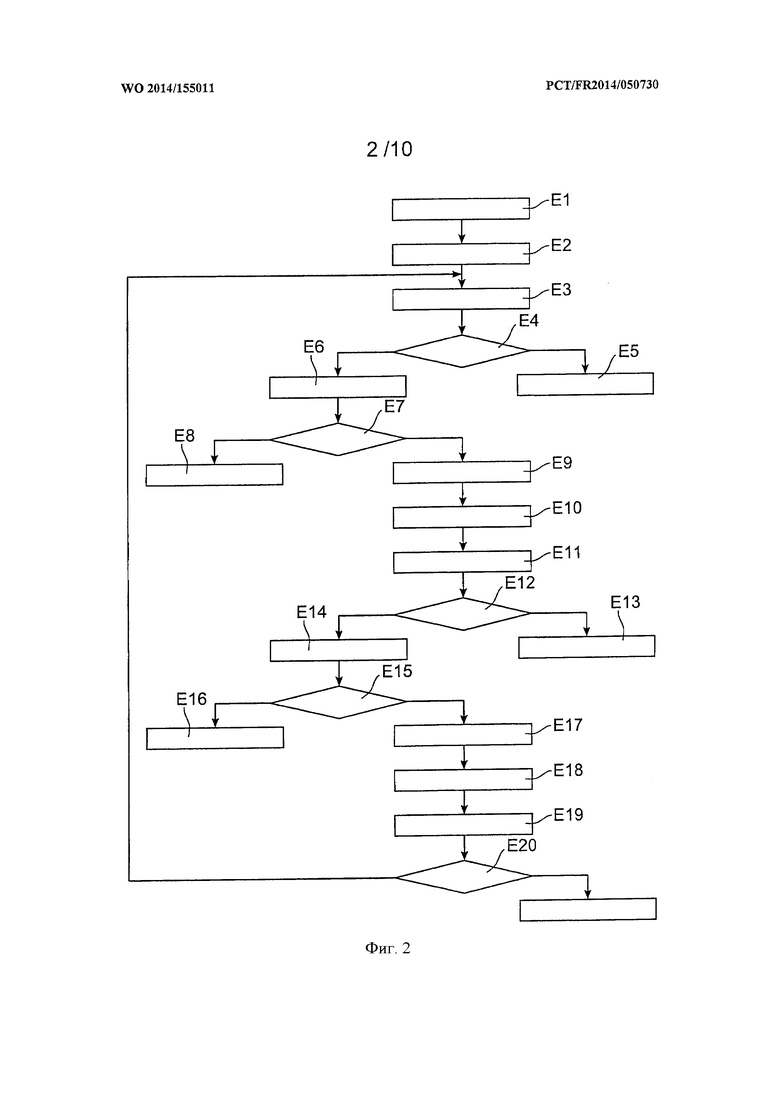
На фиг. 2 представлен алгоритм, иллюстрирующий различные этапы способа обнаружения согласно варианту осуществления изобретения.
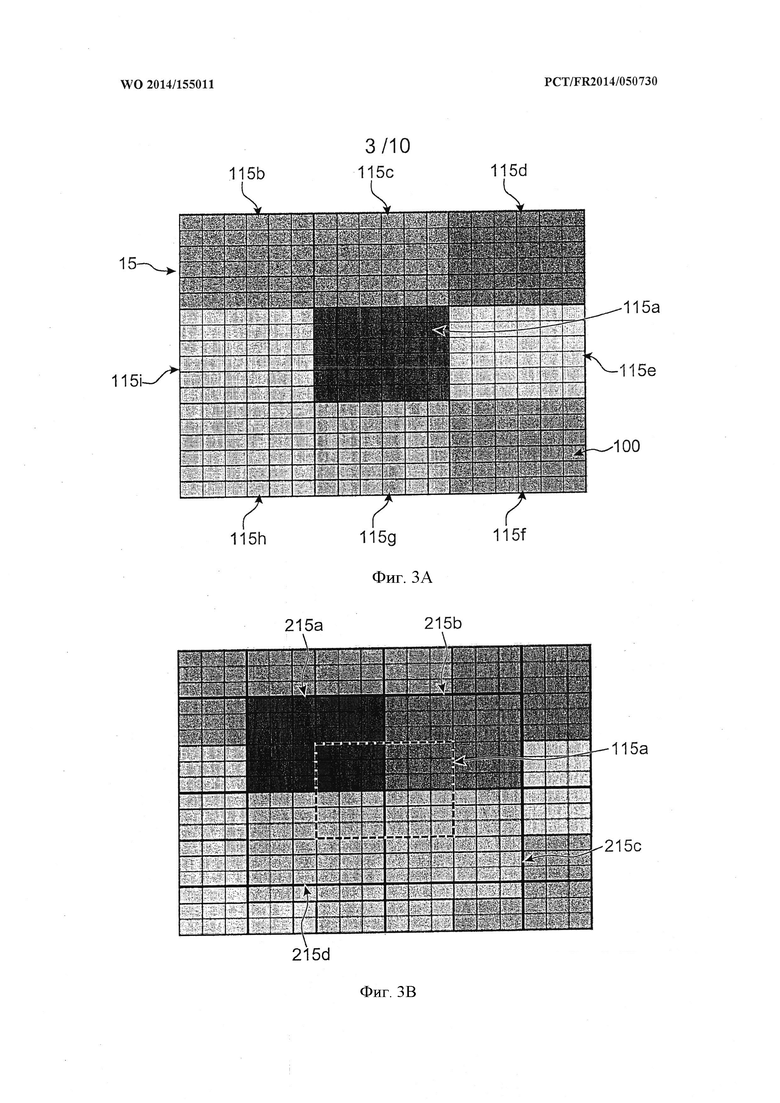
Кроме того, на фиг. 3А-3Е показаны сетки изображения 13, схематично иллюстрирующие этапы блок-схемы, показанной на фиг. 2.
На этапе Е1 средства 7 обработки формируют изображение 13, характеризующее объект 11, на основании сигналов 9, связанных с этим объектом. Изображение 13 может, например, отображать тепловое поле, считываемое термографическими средствами, или отображать ультразвуковые сигналы, считываемые датчиками ультразвуковых волн. Определяют также заданное разрешение, соответствующее минимальному размеру дефектов. Это позволяет, с одной стороны, избегать тревожных сигналов по поводу допустимых дефектов и, с другой стороны, задавать алгоритму точку остановки.
На этапе Е2 средства 7 обработки разбивают изображение 13 на множество текущих участков. Размеры участков выбирают в зависимости от размера объекта, чтобы можно было получить ближние соседние участки и дальние соседние участки.
На фиг. 3А показана сетка 15 части изображения 13 из девяти участков 115а-115i в виде крупных клеток одинакового размера. Мелкие клетки 225 отображают выбранное разрешение. Кроме того, следует отметить, что участки могут иметь шестиугольную или треугольную форму или любую другую геометрическую форму.
На этапе Е3 средства 7 обработки вычисляют первые текущие расхождения между каждым текущим участком 115а и соседними текущими участками 115b-115i. Например, расхождение характеризует разность значений физического параметра (например, оптического, теплового или звукового поля) между одним участком и соседним участком.
В частности, средства 7 обработки вычисляют составляющую физического параметра, связанную с каждым участком, и затем сравнивают составляющую каждого участка с составляющими соседних с ним участков.
Согласно примеру, показанному на фиг. 3А, каждую клетку сравнивают с восемью соседними с ней клетками, вычисляя расхождение между, с одной стороны, составляющей физического параметра в клетке 115а и, с другой стороны, составляющей, связанной с каждой из восьми прилегающих к ней клеток 115b-l15i.
Этап Е4 представляет собой тест, во время которого средства 7 обработки проверяют, существует или нет текущий участок, для которого первые текущие расхождения по меньшей мере с первым определенным числом соседних участков указывают на аномалию.
Показателем аномалии может быть, например, сравнение расхождения с заранее определенным порогом. В варианте, показатель аномалии можно определить как разность между наблюдаемым расхождением и нормальным расхождением, измеренным во время фазы обучения, и эту разность сравнивают с заранее определенным уровнем. Следует отметить, что заранее определенный порог или уровень может зависеть от многих факторов, например, таких как число соседних участков, размер участка 115а, измеряемый физический параметр, требуемая точность и т.д.
Если результат теста на этапе Е4 является отрицательным, на этапе Е5 делают вывод о том, что объект 11 является нормальным.
Если же выявляют участок, для которого первые текущие расхождения по меньшей мере с первым определенным числом соседних участков указывают на аномалию, считают, что этот участок является потенциально дефектным и переходят на этап Е6.
Следует отметить, что, если расхождения указывают на аномалию только с одним другим соседним участком, то со всей уверенностью можно считать, что речь идет о неточности или ошибке измерения. Иначе говоря, чтобы участок можно было признать потенциально дефектным, необходимо по меньшей мере одно пороговое число соседних участков, расхождения с которыми указывают на аномалию. Это пороговое число может тоже зависеть от числа соседних участков, от размера участка, от физического параметра и от требуемой точности. В примере, представленном на фиг. 3А, это пороговое число равно четырем, и на этой фигуре видно, что участок 115а в центре имеет по отношению по меньшей мере к четырем соседним участкам 115b-115i расхождение, указывающее на аномалию.
Таким образом, если тест на этапе Е4 подтвержден, средства 7 обработки сравнивают на этапе Е6 потенциально дефектный участок с удаленными участками. В частности, средства 7 обработки вычисляют вторые текущие расхождения между потенциально дефектным текущим участком и удаленными текущими участками; Например, подозреваемую центральную клетку 115а, показанную на фиг. 3А, можно сравнить только с восемью удаленными соседними участками (не показаны), чтобы ограничить вычислительную нагрузку. Следует отметить, что соседние участки выбирают по-другому для участков на краях изображения, так как невозможно получить соседние участки во всех направлениях. Так, чтобы учитывать эффекты края, можно выбирать различные пороги в зависимости то того, находятся потенциально дефектные участки на краях или внутри изображения.
Этап Е7 представляет собой тест, во время которого средства 7 обработки проверяют, имеет ли текущий участок по меньшей мере с одним вторым определенным числом удаленных текущих участков вторые текущие расхождения, указывающие на аномалию. При этом берут соседние участки, достаточно удаленные, чтобы выйти из потенциально дефектной зоны. Если результат теста на этапе Е7 является отрицательным, то на этапе Е8 считают, что подозреваемый участок является нормальным. Действительно, если один участок отличается от ближайших к нему соседних участков, но не отличается от удаленных соседних участков, можно сделать вывод, что рассматриваемый участок является нормальным, но этого нельзя сказать о ближайших соседних участках. В этом случае можно предусмотреть особый статус, но в любом случае алгоритм должен протестировать и проконтролировать ближайшие соседние участки.
Если же результат теста на этапе Е7 подтвержден, то на этапе Е9 считают, что подозреваемый участок является дефектным.
Как было указано выше, аномалию обнаруживают, если расхождение превышает заранее определенный порог. Кроме того, чтобы сделать вывод о дефектности подозреваемого участка, необходимо наличие по меньшей мере второго определенного числа соседних участков, расхождения с которыми указывают на аномалию. На фиг. 3А показано также, что участок 115а в центре имеет по отношению по меньшей мере к четырем из удаленных соседних участков (не показаны) указывающее на аномалию расхождение.
Сравнение данного участка с ближайшими к нему соседними участками и затем с удаленными участками позволяет подтвердить дефектность участка и адаптировать разрешение участков. Действительно, если расхождения между данным участком и ближайшими соседними участками указывают на аномалию и если аномалия вытекает из реального дефекта, то расхождения с удаленными соседними участками должны тоже указывать на аномалию с учетом удаленности от дефектной зоны. В частности, если аномалия связана с протяженным дефектом, то расхождения с удаленными соседними участками несомненно будут больше, чем с ближайшими соседними участками. С другой стороны, если дефект является сугубо точечным, то расхождения с удаленными соседними участками являются по меньшей мере такими же, как и с ближайшими соседними участками.
Чтобы избежать подачи ложных тревожных сигналов, для ближних и удаленных сравнений выбирают разные пороги. Действительно, удаленные участки обычно достаточно удалены от подозреваемой зоны и имеют относительно нее достаточно большие расхождения. Однако контекст в удаленных зонах может быть другим, и, следовательно, значения физического параметра между двумя зонами могут иметь существенные отклонения даже в отсутствие дефекта. Таким образом, чтобы избегать ложных тревожных сигналов, предпочтительно выбирают больший порог для сравнения между двумя удаленными участками, чем для сравнения между двумя ближними участками.
Затем средства 7 обработки вычисляют другие расхождения, меняя компоновку участков и/или изменяя их размер.
Действительно, на этапе Е10 средства 7 обработки опять разбивают зону 215, перекрывающую признанный дефектным участок 115а (см. фиг. 3В). Таким образом, получают новые участки, которые перекрывают дефектный участок. Новая зона 215 является подобной дефектному участку, например, в соотношении, строго находящемся в пределах от 1 до 2.
Пример на фиг. 3В иллюстрирует перекомпоновку участков путем простого смещения на половину клетки в горизонтальном направлении и на половину клетки в вертикальном направлении. Так, в этом примере показано, что четыре новых текущих клетки 215a-215d перекрывают предыдущую текущую дефектную клетку 115а (показана пунктиром). Каждая из этих четырех новых клеток 215a-215d перекрывает часть предыдущей клетки 115а плюс часть ее ближайшего окружения. Это позволяет контролировать все окружение зоны, признанной как дефектная.
Средства 7 обработки опять вычисляют новые расхождения, относящиеся к новой компоновке зон сравнения.
Действительно, новые участки 215a-215d считаются актуальными текущими участками, и для каждого из этих новых участков осуществляют этапы Е11-Е17, которые соответственно эквивалентны этапам Е3-Е9.
Так, на этапе El1 средства 7 обработки вычисляют первые текущие расхождения между каждым новым текущим участком 215a-215d и соседними текущими участками.
Этап Е12 представляет собой тест, во время которого средства 7 обработки проверяют, существует ли новый текущий участок, для которого первые текущие расхождения по меньшей мере с первым определенным числом соседних участков указывают на аномалию. Если результат теста на этапе Е12 является отрицательным, на этапе Е13 делают вывод о том, что участок является нормальным, в противном случае считают, что этот участок является потенциально дефектным и переходят на этап Е14.
На этапе Е14 средства 7 обработки сравнивают новый потенциально дефектный участок с удаленными участками.
Этап Е15 представляет собой тест, во время которого средства 7 обработки проверяют, имеет ли новый текущий участок по меньшей мере со вторым определенным числом удаленных текущих участков вторые текущие расхождения, указывающие на аномалию. Если результат теста на этапе Е15 является отрицательным, то на этапе Е16 считают, что поставленный под сомнение участок является нормальным. Если же результат теста на этапе Е15 подтвержден, то на этапе Е17 считают, что новый подозреваемый участок является дефектным.
Таким образом, по завершении этапа Е17 имеют по меньшей мере один новый дефектный участок и предыдущий дефектный участок. Пример на фиг. 3В иллюстрирует новую дефектную текущую клетку 215а и предыдущую дефектную клетку 115а. Перекрывание между актуальной и предыдущей дефектными клетками позволяет более точно локализовать дефект.
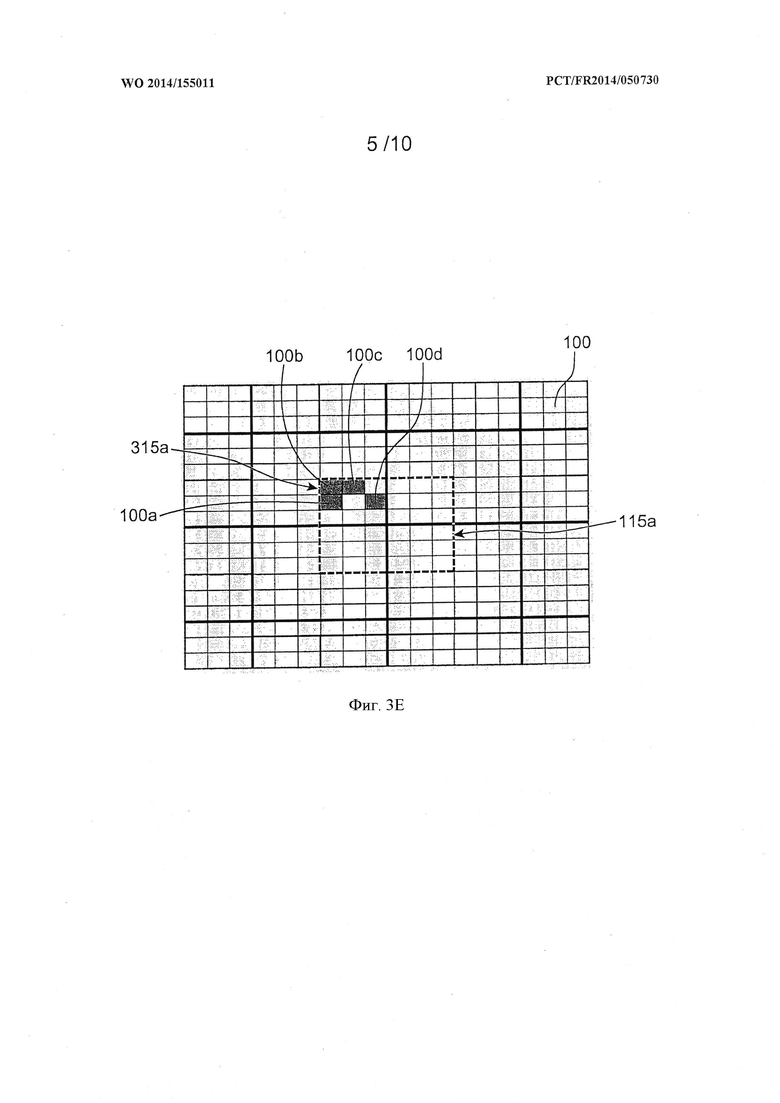
Действительно, на этапе Е18 средства 7 обработки создают маску в соответствии с логической операцией И между предыдущими дефектными участками 115а и новыми участками 215a-215d в зоне 215 перекрывания. Это позволяет получить участки 315a-315d меньших размеров, включающие в себя по меньшей мере один дефектный участок 315а меньшего размера (см. фиг. 3С). Эти новые участки 315a-315d меньших размеров считаются актуальными текущими участками.
На этапе Е19 средства 7 обработки проверяют, превышает ли размер актуального текущего участка 315a-315d заранее определенное разрешение 100. В случае утверждения средства 7 обработки повторяют предыдущие этапы Е3-Е18 для каждого актуального текущего участка, в противном случае на этапе Е20 дефектный(ые) текущий(ие) участок (участки) признают анормальным(и) участком(ами).
На фиг. 3С показано, что маска И уточняет зону, уменьшая длину и ширину клетки в 2 раза. Вместе с тем, размер дефектной клетки остается больше размера мелкой клетки 100, соответствующего разрешению, и, следовательно, возобновляют эти же этапы, как показано на фиг. 3D. Наконец, на фиг.ЗЕ показано, что разрешение 100 достигнуто и локализованы мелкие дефектные клетки 100a-100d.
На фиг. 3А-3Е показано, что заявленный способ обнаружения позволяет значительно сократить число этапов вычисления.
Действительно, изображение в примере на фиг. 3А-3Е содержит 18×18=324 мелких ячеек 100. Таким образом, абстрагируясь от краевых эффектов, если сравнить каждую ячейку 100 с восемью соседними с ней ячейками, получим 2592 сравнений, и способ в этом случае будет менее эффективным, так как будут обнаруживаться только аномалии, локализованные исключительно на ячейке 100.
При помощи описанного выше способа и опять же абстрагируясь от краевых эффектов, на этапе, показанном на фиг. 5А, реализуют 9×8=72 сравнения, на этапе, показанном на фиг. 5В, реализуют 4×8=32 сравнения, на этапе, показанном на фиг. 5С, получают ноль сравнений и, наконец, на этапе, показанном на фиг. 5D, получают 9×8=72 сравнения, то есть всего 176 сравнений. Это позволяет сократить время вычисления и работы вычислительного устройства.
В целом, для изображения объекта размером 100 см×20 см и при разрешении 1 мм, если взять отдельно зону 1 мм и сравнить ее с восемью соседними с ней зонами, можно получить без учета краевых эффектов 1600000 сравнений и обнаруживать только дефекты в 1 мм или очень выраженные дефекты.
Однако если применить способ в соответствии с изобретением, то, выбрав первоначальную сетку с ячейкой 1 см и предположив, что имеется только один дефект, получим общее число сравнений около 16000.
Таким образом, способ в соответствии с изобретением значительно сокращает число вычислений за счет оптимизации числа сравнений. Кроме того, он позволяет обнаруживать дефекты, размер которых находится в пределах между размерами первоначального участка 115а и выбранным разрешением.
Действительно, фиг. 4A-4D иллюстрируют обнаружение точечных и протяженных дефектов на различных сетках.
На фиг. 4А и 4В показано, что точечный дефект 21а можно обнаружить на крупной клетке 425 или на мелкой клетке 525. Вместе с тем, на фиг. 4С и 4D видно, что протяженный дефект 21b можно обнаружить на крупной клетке 425, но нельзя отследить на мелкой клетке 525. Действительно, расхождение между мелкой клеткой 525 и соседними с ней клетками является очень незначительным, поэтому протяженный дефект невозможно обнаружить при помощи классического метода, в котором рассматривают только мелкие клетки.
На фиг. 5 представлен алгоритм обнаружения в соответствии с изобретением, включающий в себя фазу подтверждения согласно первому варианту осуществления.
Фаза подтверждения включает в себя сравнение расхождений, связанных с анормальным участком, принадлежащим к последнему изображению, с расхождениями, относящимися к этому же анормальному участку, принадлежащему к каждому из определенных количеств предыдущих изображений объекта, при этом данные предыдущих анормальных участков сохранены в базе данных 17, связанной со средствами обработки.
Этап Е21 включает в себя измерение или считывание физического параметра (например, оптического, теплового или звукового поля), связанного с объектом 11 и позволяющего получить изображение 13 объекта 11.
На этапе Е22 данные, относящиеся к физическому параметру, поступают в средства 7 обработки.
На этапе Е23 средства 7 обработки обрабатывают данные в соответствии с блок-схемой, показанной на фиг. 2.
В частности, на этапах Е4 и Е12 (фиг. 2) проверяют, превышают ли первые текущие расхождения первый заранее определенный порог. Точно так же, на этапах Е7 и Е15 (фиг. 2) проверяют, превышают ли вторые текущие расхождения второй заранее определенный порог. Следует отметить, что значения первого и второго порогов можно изменять в зависимости от размера участка и, следовательно, от порядка итерации. Например, при первой итерации выбранное отслеживание является достаточно чувствительным (то есть, с низкими порогами), что позволяет идентифицировать анормальные участки. Действительно, если участок является большим, то, возможно, придется усреднять нормальные и анормальные зоны внутри участка.
По завершении этапа Е23, если дефект не обнаружен, то на этапе Е24 обнуляют базу данных 17, относящуюся к последним обнаружениям.
Если же после этапа Е23 обнаруживают один или несколько анормальных участков, то на этапе Е25 в базу данных 17 вводят информацию, касающуюся последнего или последних анормальных участков, после чего переходят к этапу Е26.
На этапе Е26 средства 7 обработки сравнивают расхождения, связанные с анормальным(и) участком(ами), принадлежащим(и) к последнему изображению, с расхождениями, относящимися к этому же или к этим же анормальным участкам, принадлежащим к каждому из предыдущих изображений объекта 11.
Если отмечают, что аномалия на изображении 13 появилась впервые, тревожный сигнал не подают (этап Е27).
Если же установлено, что на последних изображениях расхождения увеличились, генерируют тревожный сигнал высокого уровня (этап Е28). Можно добавить дополнительный уровень тревоги, чтобы отображать тенденцию расхождений. Например, генерируют тревожный сигнал сверхвысокого уровня, если расхождения увеличиваются и экстраполяция показывает за данный период (например, 10 полетов) превышение заранее определенного предельного порога.
Наконец, если отмечают, что расхождения остаются постоянными в последних изображениях, генерируют тревожный сигнал среднего уровня (этап Е29).
Кроме того, можно предусмотреть различные уровни порогов, соответствующие различным уровням тревожных сигналов.
На фиг. 6 представлен алгоритм обнаружения в соответствии с изобретением, включающий в себя фазу подтверждения согласно второму варианту осуществления.
Этапы алгоритма на фиг. 6 идентичны этапам на фиг. 5 за исключением этапов Е32 и Е33.
Как и в предыдущем случае, этап Е31 включает в себя измерение или считывание физического параметра (например, оптического, теплового или звукового поля), связанного с объектом 11 и позволяющего получить изображение 13 объекта 11. Если данные соответствуют первому изображению, переходят на этап Е32, в противном случае переходят на этап Е33.
Этап Е32 представляет собой фазу обучения, в ходе которой формируют базу данных, сравнивая расхождения участков первого изображения нормального объекта. Это можно осуществить путем осуществления этапов сравнения между соседними участками, показанных на блок-схеме на фиг. 2.
Так, на этапе Е32 формируют базу данных обучения, в которую записывают нормальные расхождения между различными участками исходного нормального изображения, учитывая при этом, что это изображение необязательно должно быть однородным, по причине наличия внутренних, но нормальных различий объекта.
Если изображение объекта не является первым изображением, то переходят на этап Е33, на котором средства 7 обработки обрабатывают данные в соответствии с блок-схемой, показанной на фиг. 2.
Однако на этапах Е4 и Е12 (фиг. 2) вычисляют различия между первыми текущими расхождениями соседних участков и соответствующими нормальными расхождениями, чтобы проверить, превышают ли они заранее определенный уровень. На этапах Е7 и Е15 (фиг. 2) проверяют, превышают ли вторые текущие расхождения между удаленными участками и соответствующими нормальными расхождениями второй заранее определенный порог.
Способ обнаружения в соответствии с настоящим изобретением является недорогим в плане вычислений, и, следовательно, его можно легко применять при помощи бортовых средств обработки летательного аппарата, например, для обнаружения дефектов или предпосылок повреждения вращающегося элемента двигателя летательного аппарата.
Действительно, на фиг. 7 схематично показана система обнаружения дефектов на вращающемся элементе авиационного двигателя согласно первому варианту выполнения системы, показанной на фиг. 1.
Вращающийся элемент 111 показан снаружи и соответствует, например, лопасти или лопатке рабочего колеса 112 или поворотному капоту двигателя 114. Рабочее колесо 112 может принадлежать к компрессору двигателя 114 и может соответствовать, например, капотированному или не капотированному вентилятору авиационного двигателя.
Согласно варианту выполнения, показанному на фиг. 7, сигналы, связанные с вращающимся элементом, являются инфракрасными сигналами, поступающими от элемента, и, следовательно, средства возбуждения являются бортовыми средствами 113 нагрева, а средства считывания являются бортовыми термографическими средствами 115.
Средства 113 нагрева выполнены с возможностью нагрева вращающегося элемента 111 двигателя 114 посредством теплового воздействия 119. Разумеется, тепло проникает в материал вращающегося элемента 3. Таким образом, локальные температуры меняются от одной области к другой, так как тепло проникает в большей или меньшей степени в зависимости от присутствия или отсутствия дефектов 121. Например, средства 113 нагрева могут представлять собой один или несколько тепловых излучателей, закрепленных на двигателе 114 или на летательном аппарате 116 напротив вращающегося элемента 111. Таким образом, каждый тепловой излучатель 113 установлен на летательном аппарате 116 стационарно, и его можно регулировать с целью периодического или импульсного нагрева вращающегося элемента 111.
Кроме того, термографические средства 115 выполнены с возможностью считывания по меньшей мере одного инфракрасного изображения 113 вращающегося элемента 111, которое отображает в результате теплового воздействия 119 тепловое поле в переходной фазе. Следует отметить, что термографические средства 115 могут представлять собой один или несколько тепловизоров, закрепленных на двигателе 114 или на летательном аппарате 116 напротив вращающегося элемента 111.
Предпочтительно съемку вращающихся элементов 111 производят во время вращения на очень низком режиме (то есть в начале фазы запуска, в конце фазы остановки или во время работы в режиме авторотации "wind milling" на земле). Это позволяет получить полную картину вращающихся элементов 111 без помех для считывания изображений 113. Преимуществом съемки на режиме малого газа является возможность использования только одной камеры для обнаружения дефектов на всех лопатках поочередно. Разумеется, съемку можно производить и на остановленном двигателе, но в этом случае необходимо множество камер для обнаружения дефектов на всех лопатках.
Следует отметить, что нагрев и считывание изображений происходят без контакта, что позволяет, с одной стороны, избегать повреждения тестируемого материала и, с другой стороны, отказаться от установки датчиков на лопатках 111 или очень близко от этих лопаток, что могло бы влиять на их аэродинамику. Кроме того, наличие на борту средств 113 нагрева и термографических средств 115 позволяет считывать изображения во время каждого полета, причем автоматически, без длительного и дорогого вмешательства человека.
Средства 7 обработки выполнены с возможностью считывания инфракрасного изображения 113 при помощи термографических средств 115 и с возможностью осуществления этапов способа обнаружения в соответствии с блок-схемами, показанными на фиг.2, 5 или 6.
Расхождения можно вычислять относительно составляющей (например, амплитуды или фазы) теплового поля между различными участками инфракрасного изображения 113. Обнаружение изменений составляющей теплового поля указывает на дефекты или на предпосылки разрыва вращающегося элемента 111. Таким образом, в каждом полете можно автоматически контролировать вращающиеся элементы 111 двигателя 114 для обнаружения первых признаков усталости до того, как произойдет поломка лопатки. В частности, система 101 обнаружения выполнена с возможностью контроля вращающихся элементов 111 из композиционных материалов, которые могут претерпевать усталость, порождающую дефекты 121, не видимые на их поверхности.
Следует отметить, что осуществление анализа данных в зависимости от дифференцированных измерений в переходных тепловых фазах позволяет абстрагироваться от контекста, такого как наружная температура или солнечное освещение. Действительно, внешние условия действуют одинаково на текущий участок в два последовательных момента.
Предпочтительно можно использовать средства 107 обработки бортового вычислительного устройства 118 летательного аппарата 116 или вычислительного устройства 118, встроенного в двигатель 114 летательного аппарата, типа EMU (Engine Monitoring Unit) для применения системы 101 обнаружения в соответствии с изобретением. В частности, вычислительное устройство 118 можно использовать для исполнения компьютерной программы, записанной в запоминающих средствах 117 вычислительного устройства 118 и содержащей командные коды для применения способа обнаружения в соответствии с изобретением.
Следует отметить, что считанные данные можно обрабатывать непосредственно во время полета летательного аппарата. В варианте обработку данных можно осуществлять после посадки летательного аппарата, чтобы не перегружать вычислительное устройство 118 во время полета. Согласно еще одному варианту, считанные данные можно передавать на землю для обработки вычислительным центром.
Согласно первой версии варианта выполнения, показанного на фиг.7, средства 113 нагрева выполнены с возможностью нагрева при помощи тепловых импульсов или переходных тепловых фаз.
Средства 113 нагрева соответствуют тепловому излучателю (например, нагревательной лампе), закрепленному непосредственно на двигателе или на летательном аппарате напротив вращающегося элемента для его импульсного нагрева. Вращающийся элемент нагревается за достаточно короткое время (несколько миллисекунд), чтобы материал вращающегося элемента не достиг постоянной температуры. Тепловой излучатель закреплен на заранее определенном расстоянии от вращающегося элемента, которое может составлять от нескольких миллиметров до нескольких метров.
Термографические средства 115 соответствуют, например, тепловизору, установленному вблизи вращающегося элемента, например, на расстоянии от нескольких сантиметров до нескольких метров, и снимают изображения во время нагрева.
В этом случае средства 107 обработки вычисляют расхождения между амплитудой теплового поля (то есть температурой) текущего участка и амплитудами (то есть температурами) тепловых полей соседних участков. Таким образом, если материал вращающегося элемента имеет дефект на поверхности или на глубине, температура на поверхности при импульсном тепловом воздействии будет различаться. Сравнение температур между различными участками позволяет обнаруживать дефекты.
Согласно второй версии варианта выполнения, показанного на фиг. 7, средства 113 нагрева выполнены с возможностью нагрева вращающегося элемента 111 при помощи периодических тепловых волн в течение определенного времени, например, порядка нескольких секунд. В этом случае тепловой излучатель 113 закреплен на двигателе (или на летательном аппарате) напротив вращающегося элемента 111 на заранее определенном расстоянии, которое может составлять от нескольких миллиметров до нескольких метров. Тепловой излучатель 113 соответствует, например, нагревательной лампе типа вспышки, направляющей периодическую тепловую волну с заранее определенной частотой для периодического нагрева вращающегося элемента.
Тепловизор 115 установлен вблизи вращающегося элемента 111, например, на расстоянии от нескольких сантиметров до нескольких метров, и снимает изображения во время нагрева.
Тепловой излучатель 113 и тепловизор 115 можно располагать непосредственно на фюзеляже или на крыле летательного аппарата.
В этой второй версии средства 107 обработки выполнены с возможностью осуществления, например, анализа Фурье для определения изменения фазы между различными участками инфракрасного изображения вращающегося элемента. Если материал является однородным, тепловая энергия распределяется одинаково, и между разными зонами нет смещения фазы. Если же материал вращающегося элемента имеет дефект, тепловая энергия не будет распространяться одинаково, и тепловая волна будет либо ускоряться, либо замедляться в дефекте, что выражается смещением фазы. Таким образом, средства 107 обработки вычисляют фазовые смещения между тепловым полем текущего участка и тепловыми полями соседних участков для обнаружения дефектов.
Следует отметить, что преимуществом этой второй версии является то, что на нее мало влияет удаленность источника тепла или солнечное освещение, так как измеряют не температуру, а фазовое смещение. Чтобы повысить точность измерений, предпочтительно тепловой излучатель не следует располагать слишком далеко от вращающегося элемента.
Согласно третьей версии варианта выполнения, показанного на фиг. 7, средства 113 нагрева представляют собой по меньшей мере один нагревательный элемент для борьбы с обледенением, уже существующий в двигателе.
Действительно, если вращающиеся элементы 111 уже имеют средства нагрева, предназначенные для борьбы с обледенением, система обнаружения в соответствии с изобретением может использовать этот источник тепла, поэтому можно отказаться от установки дополнительных нагревательных средств и, следовательно, уменьшить полетную массу.
В этом случае нагревательный элемент для борьбы с обледенением регулируют во время автоматических тестов, например, во время запуска, чтобы подавать тепло во время заранее определенных периодов.
Если нагревательный элемент не встроен в лопатку, а закреплен снаружи, то процесс обнаружения строго идентичен процессу из первой и второй версий. Если же нагревательный элемент является достаточно мощным и встроен в лопатку, можно использовать достаточно короткое время нагрева в несколько секунд, после которого следует время охлаждения в несколько секунд.
В частности, если нагревательный элемент представляет собой нагревательные нити, распределенные на поверхности лопатки, на нагревательный элемент подают постоянный ток в течение определенного времени нагрева, затем питание прекращают, чтобы понизить температуру. После определенного времени выжидания (всегда одинакового от полета к полету) получают переходную фазу теплового поля, и средства 107 обработки включают камеру для съемки инфракрасного изображения. В случае аномалии материала вращающегося элемента охлаждение будет различаться, и каждый участок можно сравнить с ближними и удаленными соседними с ним участками, причем от полета к полету. С другой стороны, в этом случае под нагревательными нитями дефекты обнаруживать невозможно, так как температура нитей сильно влияет на тепловую реакцию материала в этом месте.
Если же нагревательные нити находятся не на поверхности, а встроены внутри материала лопатки, ситуация оказывается более благоприятной, чем в предыдущем случае, так как нити не скрывают поверхность лопатки, и можно легко получить реакцию по толщине, при этом можно обнаруживать дефекты внутри и на всей поверхности лопатки. Обработка данных является такой же, как и в предыдущем варианте.
Кроме того, предпочтительно средства 107 обработки выполнены с возможностью проверки нормальной работы нагревательного элемента системы антиобледенения посредством контроля за расхождением амплитуды вращающихся элементов. Так, если ответ по амплитуде становится все слабее и даже нулевым или все сильнее от полета к полету даже с учетом влияния старения лопаток на тепловые реакции, средства 107 обработки могут поставить под сомнение нагревательный элемент.
На фиг. 8 представлена блок-схема этапов обнаружения дефектов на рабочем колесе двигателя в соответствии с системой, показанной на фиг. 7.
Согласно этому примеру вращающийся элемент соответствует каждой из лопаток рабочего колеса 112.
В блоке В1 средства 107 обработки получают данные от двигателя 114 (показан в блоке В2), касающиеся режима вращения контролируемого лопаточного колеса 112. Средства 107 обработки запускают способ обнаружения, когда лопаточное колесо 112 начинает вращаться на очень малом режиме.
В блоке В3 средства 113 нагрева нагревают лопатки 111 рабочего колеса 112 двигателя 114 (блок В2) посредством теплового воздействия 119, создавая тепловое поле, которое изменяется в зависимости от фаз нагрева и охлаждения. Следует отметить, что тепловое воздействие (тепловые импульсы или периодическая тепловая волна) проникает в материал лопатки 111, поэтому, если материал имеет дефект 121 (на поверхности или в глубине), амплитуда и/или фаза теплового поля на поверхности будет различаться.
Затем, когда тепловое поле находится в своей переходной фазе нагрева или охлаждения, тепловизор или тепловизоры 115 фотографируют лопатки 111 рабочего колеса 112 двигателя 114 (блок В2) для получения по меньшей мере одного инфракрасного изображения 113 лопаток 111.
Таким образом, в блоке В4 получают по меньшей мере одно инфракрасное изображение 113. Следует отметить, что каждый тепловизор 115 может быть выполнен с возможностью съемки одного изображения для каждой лопатки или одного изображения для всех лопаток рабочего колеса 112.
В блоке В5 используют средства 122 идентификации лопаток 111 для распознавания различных лопаток рабочего колеса 112. Это обеспечивает мониторинг различных лопаток в течение времени и позволяет идентифицировать те из них, которые имеют дефекты.
Эти средства идентификации представляют собой, например, оптические средства распознавания формы. Например, можно использовать тепловизор 115, который уже имеет алгоритм распознавания формы для идентификации лопаток.
В варианте, средства идентификации являются средствами индивидуализации при помощи маркировки 122 или этикеток на одной или двух лопатках рабочего колеса 112. Индивидуализацию лопаток 111 можно осуществлять путем нанесения на них номеров при помощи краски или любого другого материала, вводимого в лопатку или наносимого на ее поверхность.
В блоке В6 средства 107 обработки осуществляют этапы из блок-схемы, показанной на фиг. 2, 5 или 6. В частности, средства 107 обработки осуществляют анализ Фурье для вычисления составляющей (амплитуды или фазы) теплового поля каждого участка инфракрасного изображения 113 для каждой из лопаток 111 и сравнивают между собой различные участки.
В частности, если для нагрева лопаток 111 рабочего колеса 112 используют тепловые импульсы, то составляющая теплового поля соответствует амплитуде теплового поля (то есть температуре). Если же для нагрева лопаток 111 используют периодическую тепловую волну, составляющая теплового поля соответствует фазе теплового поля.
Если материал лопатки является однородным, то вся его поверхность реагирует на тепловое воздействие 119 одинаково, и, следовательно, составляющая теплового поля будет постоянной на всех зонах. Если материал имеет неровность на поверхности или в глубине, то составляющая теплового поля на поверхности при тепловом воздействии 119 будет различаться. Таким образом, сравнивая составляющие на различных относительно близких зонах, можно обнаруживать дефекты.
Если в блоке В7 обнаружен дефект, то перед подачей тревожного сигнала средства 107 обработки сравнивают в блоке В7 результаты по нескольким полетам, чтобы убедиться, что аномалия по-прежнему обнаруживается (см. также этапы Е26-Е29 и Е36-Е39 на фиг. 5 и 6). Действительно, средства 107 обработки выполнены с возможностью записи при каждом полете расхождений, связанных с тепловыми полями различных участков, чтобы иметь возможность анализировать изменение этих расхождений от полета к полету. Таким образом, можно количественно определить изменение дефектов для каждой лопатки 111, сравнивая данные, полученные в текущем полете, с данными предыдущих полетов, сохраненными в базе данных 117а (блок В8).
Предпочтительно система 101 обнаружения содержит библиотеку аномалий или базу данных 117b (блок В8) сигнатур деградаций, характеризующих различные формы деградаций и стадии их развития. Это позволяет средствам 107 обработки сравнивать расхождения, связанные с тепловыми полями зон, имеющих предпосылки повреждения, с характеристическими сигнатурами деградаций, и определять, таким образом, тип деградации и степень ее развития.
На фиг. 9 схематично показана система обнаружения дефектов на вращающемся элементе двигателя летательного аппарата согласно второму варианту выполнения системы, показанной на фиг. 1.
Согласно этому варианту выполнения, сигналы, связанные с вращающимся элементом, являются ультразвуковыми сигналами, средства возбуждения являются средствами 213 излучения ультразвуковых волн, и средства считывания являются средствами 215 приема ультразвуковых волн, отраженных от элемента 211.
Средства излучения 213 и приема 215 могут представлять собой одно устройство. В частности, устройство может содержать источник ультразвуков типа электроемкостного или пьезоэлектрического источника, связанный с приемником этого же типа (то есть электроемкостным, если источник является электроемкостным).
Бортовые средства излучения 213 и приема 215 установлены на двигателе 214 при помощи средств 232 поворота и/или вращения. Таким образом, средства излучения 213 и приема 215 могут поворачиваться и/или вращаться, чтобы сканировать несколько зон пространства, например, каждый вращающийся элемент 211 рабочего колеса 212. Таким образом, нет необходимости в установке устройства приема/излучения ультразвуков на каждой лопатке. Следует отметить, что сканирование вращающихся элементов 211 производят, когда они не вращаются.
Предпочтительно ультразвуковой источник 213 производит ультразвуки в диапазоне низких частот (например, 50 кГц-1 МГц), чтобы избегать слишком сильного ослабления, которое является функцией квадрата частоты. Частоту можно выбирать в зависимости от требуемого разрешения (то есть от размера выявляемых дефектов). Чем больше частота, тем больше будет разрешение, но и тем больше будет ослабляться сигнал, следовательно, необходимо находить компромисс в зависимости от применения.
Средства 207 обработки выполнены с возможностью формирования изображения 213, характеризующего вращающийся элемент 211, при помощи ультразвуковых волн 219, отраженных элементом 211 и улавливаемых средствами 215 приема, и с возможностью осуществления этапов способа обнаружения в соответствии с блок-схемами, показанными на фиг. 2, 5 или 6.
Расхождения можно вычислять по отношению к интенсивности или к направлению отраженных ультразвуковых волн 219. Следует отметить, что ультразвуковые волны очень мало проникают в материал и отражаются более чем на 99,9% (по причине разности акустического сопротивления между воздухом и металлами или композиционными материалами). Таким образом, в случае аномалии или поверхностного дефекта отражение будет различаться по интенсивности и/или по направлению, и в этом случае можно обнаруживать мелкие структурные дефекты, например, после столкновения с посторонним телом.
Таким образом, в каждом полете можно автоматически контролировать вращающиеся элементы 211 двигателя 214 для обнаружения первых признаков усталости, прежде чем произойдет поломка лопатки.
Следует отметить, что анализ данных по дифференциальным измерениям интенсивности или направления отраженных волн позволяет пренебречь тем, что контролируемый элемент может не всегда находиться на одинаковом расстоянии от средств приема.
Таким образом, настоящее изобретение позволяет контролировать вращающиеся элементы из металла или из композиционных материалов двигателя летательного аппарата, чтобы автоматически и индивидуально во время каждого полета обнаруживать первые признаки усталости при помощи средств, закрепленных на двигателе или на летательном аппарате. Предпочтительно его применяют для мониторинга лопаток вентилятора турбореактивного двигателя, винтов турбовинтового двигателя или не капотированного двигателя, а также его вращающихся капотов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕПЛОВИЗИОННОГО КОНТРОЛЯ ВОДЫ В АВИАЦИОННЫХ СОТОВЫХ ПАНЕЛЯХ ЭКСПЛУАТИРУЕМЫХ САМОЛЕТОВ | 2005 |
|
RU2284515C1 |
| СИСТЕМА ФОРМИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ГРАФИКА И МАРШРУТНО-ТЕХНОЛОГИЧЕСКИХ КАРТ ВЫПОЛНЕНИЯ ОПЕРАТИВНОГО ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ГРУППЫ ВОЗДУШНЫХ СУДОВ | 2023 |
|
RU2825239C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ, СОДЕРЖАЩИХ УГЛЕРОДНОЕ ВОЛОКНО | 2018 |
|
RU2703612C1 |
| СКАНИРУЮЩИЙ ТЕПЛОВИЗИОННЫЙ ДЕФЕКТОСКОП | 2022 |
|
RU2786045C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ АКТИВНОГО ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТА | 2003 |
|
RU2235993C1 |
| Способ комплексной диагностики рельсов | 2017 |
|
RU2642687C1 |
| Способ обнаружения несанкционированного сброса сточных вод в речной водоток с применением тепловизионного оборудования | 2024 |
|
RU2831517C1 |
| ТЕРМОГРАФИЧЕСКИЙ СПОСОБ КОНТРОЛЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2659617C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕЖРОТОРНОГО ПОДШИПНИКА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2552389C1 |


Изобретение относится к области неразрушающего контроля и может быть использовано для контроля вращающихся элементов авиационного двигателя. Объектами изобретения являются система и способ обнаружения дефектов на объекте, содержащий этапы, на которых: формируют изображение (13), характеризующее указанный объект (11), на основании сигналов (9), связанных с объектом, разбивают указанное изображение на участки (15) в соответствии с самоадаптирующимися разрешениями и вычисляют расхождения между различными участками для обнаружения аномального участка, указывающего на возможность повреждения. Технический результат - повышение точности и достоверности получаемых данных. 2 н. и 10 з.п. ф-лы, 16 ил.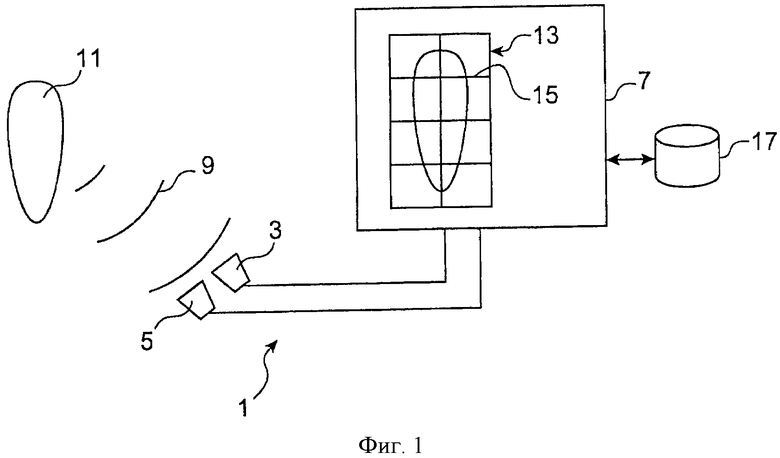
1. Способ обнаружения дефектов на объекте, содержащий этапы, на которых:
формируют изображение (13), характеризующее указанный объект (11), на основании сигналов (9), связанных с объектом,
разбивают указанное изображение на участки (15) в соответствии с самоадаптирующимися разрешениями, при этом адаптация указанных разрешений происходит итеративно по протяженности дефекта, и
осуществляют итеративное вычисление расхождений между различными участками для обнаружения аномального участка, указывающего на возможность повреждения.
2. Способ по п. 1, дополнительно содержащий этап подтверждения, на котором сравнивают расхождения, связанные с аномальным участком, относящимся к последнему изображению (13), с расхождениями, связанными с тем же аномальным участком, относящимся к каждому из заданного числа предыдущих изображений указанного объекта.
3. Способ по п. 2, дополнительно содержащий этапы, на которых:
генерируют тревожный сигнал высокой или сверхвысокой важности, если определено, что на последних изображениях расхождения увеличиваются, и
генерируют тревожный сигнал средней важности, если определено, что на последних изображениях расхождения остаются постоянными.
4. Способ по любому из пп. 1-3, в котором на этапе разбиения на участки и вычисления расхождений:
(a1) разбивают указанное изображение на множество текущих участков,
(а2) вычисляют первые текущие расхождения между каждым текущим участком и соседними текущими участками,
(а3) проверяют наличие текущего участка, для которого первые текущие расхождения по меньшей мере с первым заданным числом соседних участков указывают на аномалию,
(а4) в случае подтверждения предыдущего этапа (а3) вычисляют вторые текущие расхождения между указанным текущим участком и удаленными текущими участками,
(а5) проверяют в указанном текущем участке наличие вторых текущих расхождений, указывающих на аномалию, по меньшей мере со вторым заданным числом удаленных текущих участков,
(а6) в случае подтверждения предыдущего этапа (а5) указанный текущий участок отмечают как дефектный,
(а7) повторно делят зону, перекрывающую указанный дефектный текущий участок, для получения новых участков, перекрывающих предыдущий дефектный участок, при этом новые участки считаются действительными текущими участками,
(а8) повторяют этапы (а2)-(а6) для каждого из новых текущих участков указанной зоны перекрытия,
(а9) создают маску в соответствии с логической операцией И в указанной зоне перекрытия между предыдущими дефектными участками и новыми участками, получая таким образом участки меньшего размера, при этом указанные участки меньшего размера считаются действительными текущими участками,
(а10) проверяют, превышает ли размер действительного текущего участка заданное разрешение, и
(a11) в случае подтверждения предыдущего этапа (а10) повторяют предыдущие этапы (а2)-(а10) для каждого действительного текущего участка, а в противном случае текущий(ие) дефектный(ые) участок(участки) отмечают как аномальный(ые) участок(участки).
5. Способ по п. 4, в котором на этапе (а3) проверяют, не превышают ли первые текущие расхождения первый заранее заданный порог, а на этапе (а5) проверяют, не превышают ли вторые текущие расхождения второй заданный порог.
6. Способ по любому из пп. 1-3, дополнительно содержащий этап, на котором формируют базу обучающих данных, в которую записывают нормальные расхождения между различными участками изображения, при этом на этапе (а3) вычисляют различия между первыми текущими расхождениями и соответствующими нормальными расхождениями, чтобы проверить, не превышают ли различия заданный уровень, а на этапе (а5) вычисляют различия между вторыми текущими расхождениями и соответствующими нормальными расхождениями, чтобы проверить, не превышают ли различия второй заданный уровень.
7. Способ по любому из пп. 1-3, в котором указанный объект является вращающимся элементом (111) авиационного двигателя (114).
8. Способ по любому из пп. 1-3, в котором сигналы, связанные с указанным объектом, являются инфракрасными сигналами, поступающими от объекта, а потому указанное изображение, характеризующее указанный объект, является инфракрасным изображением, отображающим тепловое поле в переходной фазе после нагрева объекта при тепловом воздействии.
9. Способ по любому из пп. 1-3, в котором сигналы, связанные с указанным объектом, являются ультразвуковыми сигналами, поступающими от объекта, а потому указанное изображение, характеризующее указанный объект, является изображением, отображающим ультразвуковые волны, отражающиеся от объекта.
10. Система обнаружения дефектов по меньшей мере на одном вращающемся элементе (111) авиационного двигателя (114), содержащая:
бортовые средства возбуждения, выполненные с возможностью вызывать излучение сигналов указанным вращающимся элементом,
бортовые средства считывания, выполненные с возможностью приема сигналов, поступающих от указанного вращающегося элемента, и
средства обработки для осуществления этапов способа по любому из пп. 1-9.
11. Система по п. 10, в которой средства возбуждения представляют собой средства (113) нагрева для нагрева указанного вращающегося элемента двигателя посредством теплового воздействия, а средства считывания являются термографическими средствами (115) для считывания инфракрасного изображения, отображающего тепловое поле в переходной фазе указанного вращающегося элемента.
12. Система по п. 10, в которой средства возбуждения представляют собой средства (213) излучения ультразвуковых волн, а средства считывания являются средствами (215) приема ультразвуковых волн, отраженных объектом.
| US 20080028846 A1, 07.02.2008 | |||
| US 5245424 A, 14.09.1993 | |||
| US 20080000299 A1, 03.01 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| WO 2002082027 A2, 17.10.2002 | |||
| WO 2008063313 A2, 29.05.2008. | |||

