ОБЛАСТЬ ТЕХНИКИ
Варианты реализации настоящего изобретения в целом относятся к технологии получения непрерывного обвода (СМТ, Continuous Moldline Technology). Более конкретно, варианты реализации настоящего изобретения относятся к управляющим поверхностям на основе технологии получения непрерывного обвода.
УРОВЕНЬ ТЕХНИКИ
При перемещении управляющих полетом поверхностей обычно возникают зазоры, которые в свою очередь вызывают дополнительный акустический шум в корпусе самолета, ухудшают его аэродинамические характеристики и увеличивают аэродинамическое сопротивление. Например, во время захода на посадку для приземления зазоры могут быть образованы во время перемещения управляющих полетом поверхностей при тангаже и крене для изменения направления полета. Образование любых зазоров или краев может увеличить акустический шум и ухудшить эффективность аэродинамики и/или увеличить аэродинамическое сопротивление.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предложены эластомерная управляющая поверхность на основе технологии получения непрерывного обвода и способы ее создания. Управляющую поверхность соединяют с гидрогазодинамическим корпусом. С управляющей поверхностью и гидрогазодинамическим корпусом соединяют эластомерное сопрягающее средство таким образом, что стыковой зазор, образованный при перемещении из управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Таким образом, перемещением транспортного средства точно и бесшумно управляют без образования зазоров, в результате чего уменьшается акустический шум и улучшается аэродинамика. Отсутствие зазоров или краев снижает акустический шум и улучшает аэродинамические характеристики или уменьшает аэродинамическое сопротивление. Например, во время захода на посадку для приземления зазоры перекрываются, в результате чего уменьшается шум во время перемещения управляющих полетом поверхностей при тангаже и крене для изменения направления полета. Кроме того, управляющие полетом поверхности, окруженные эластомером, имеют меньшую площадь по сравнению с управляющими полетом поверхностями, не окруженными эластомером, и в то же время выполняют функции, по существу эквивалентные функциям управляющих полетом поверхностей, не окруженных эластомером.
Согласно одному варианту реализации эластомерная управляющая поверхность на основе технологии получения непрерывного обвода содержит: первую управляющую поверхность, соединенную с гидрогазодинамическим корпусом; и первую эластомерное сопрягающее средство, соединенную с первой управляющей поверхностью и гидрогазодинамическим корпусом таким образом, что первый стыковой зазор, образованный при перемещении первой управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Согласно другому варианту реализации способ создания эластомерной управляющей поверхности на основе технологии получения непрерывного обвода содержит этапы, на которых: берут управляющую поверхность, соединенную с гидрогазодинамическим корпусом, и соединяют эластомерное сопрягающее средство с управляющей поверхностью и гидрогазодинамическим корпусом таким образом, что стыковой зазор, образованный при перемещении управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Согласно дополнительному варианту реализации способ управления подъемной силой гидрогазодинамического корпуса путем использования эластомерной управляющей поверхности на основе технологии получения непрерывного обвода содержит этапы, на которых: согласуют контур управляющей поверхности, соединенной с гидрогазодинамическим корпусом, в первом положении управляющей поверхности, и изменяют толщину гидрогазодинамического корпуса во втором положении управляющей поверхности. Способ дополнительно содержит этап, на котором согласуют эластомерное сопрягающее средство, соединенное с управляющей поверхностью и гидрогазодинамическим корпусом, с образованием непрерывного обвода таким образом, что стыковой зазор, образованный при перемещении управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Настоящее раскрытие приведено для ознакомления с изложенными в упрощенной форме концепциями настоящего изобретения, которые дополнительно подробно описаны ниже. Настоящее раскрытие не предназначено для идентификации основных или существенных особенностей заявленного объекта настоящего изобретения, а также для использования в качестве инструмента при определении объема защиты настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более полное понимание вариантов реализации настоящего изобретения может быть получено при ознакомлении с подробным описанием и пунктами приложенной формулы в сочетании с сопроводительными чертежами, на которых позиционные номера обозначают соответствующие элементы. Сопроводительные чертежи приведены для облегчения понимания настоящего изобретения без ограничения охвата, объема защиты, масштаба или применимости настоящего изобретения. Сопроводительные чертежи не обязательно являются масштабированными.
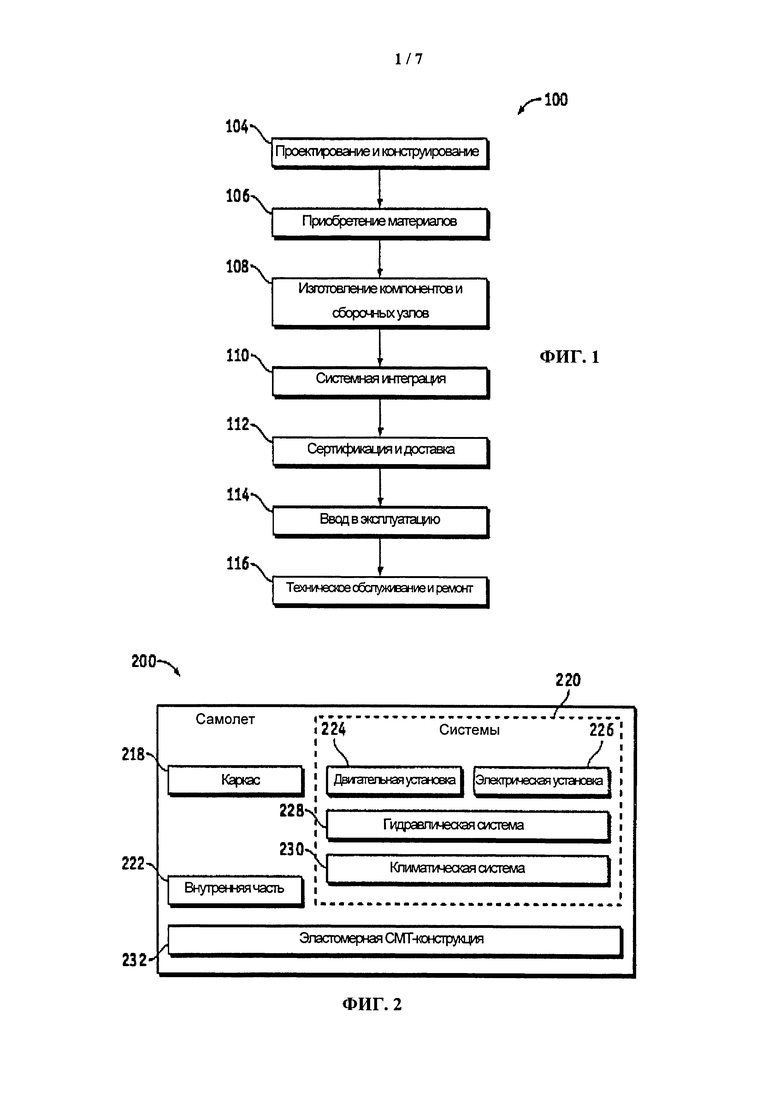
На фиг. 1 показан пример блок-схемы способа изготовления и эксплуатации самолета.
На фиг. 2 показан пример структурной схемы самолета.
На фиг. 3 показан пример системы управления эластомерной конструкцией на основе технологии получения непрерывного обвода согласно варианту реализации настоящего изобретения.
На фиг. 4 схематически показан вид сверху примера эластомерной конструкции на основе технологии получения непрерывного обвода, показывающего уменьшенную управляющую поверхность на основе технологии получения непрерывного обвода, встроенную в полноразмерную управляющую поверхность, согласно варианту реализации настоящего изобретения.
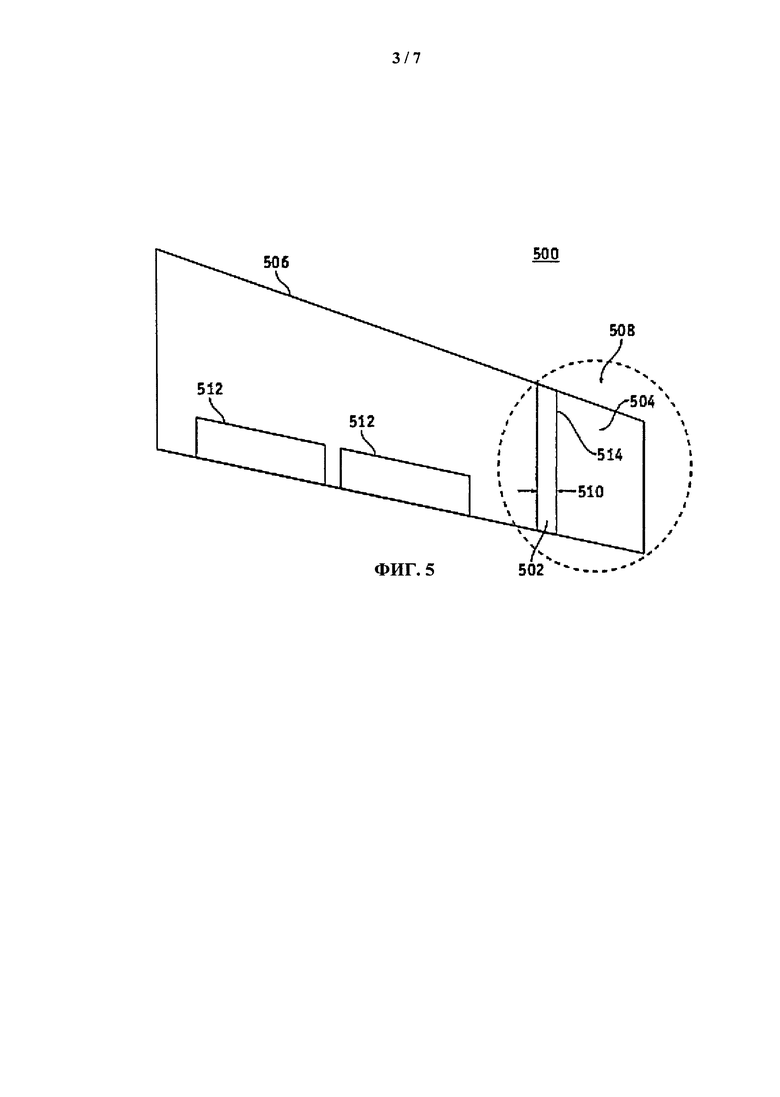
На фиг. 5 схематически показан вид сверху примера эластомерной конструкции на основе технологии получения непрерывного обвода, показывающего концевой обтекатель крыла на основе технологии получения непрерывного обвода для управления креном согласно варианту реализации настоящего изобретения.
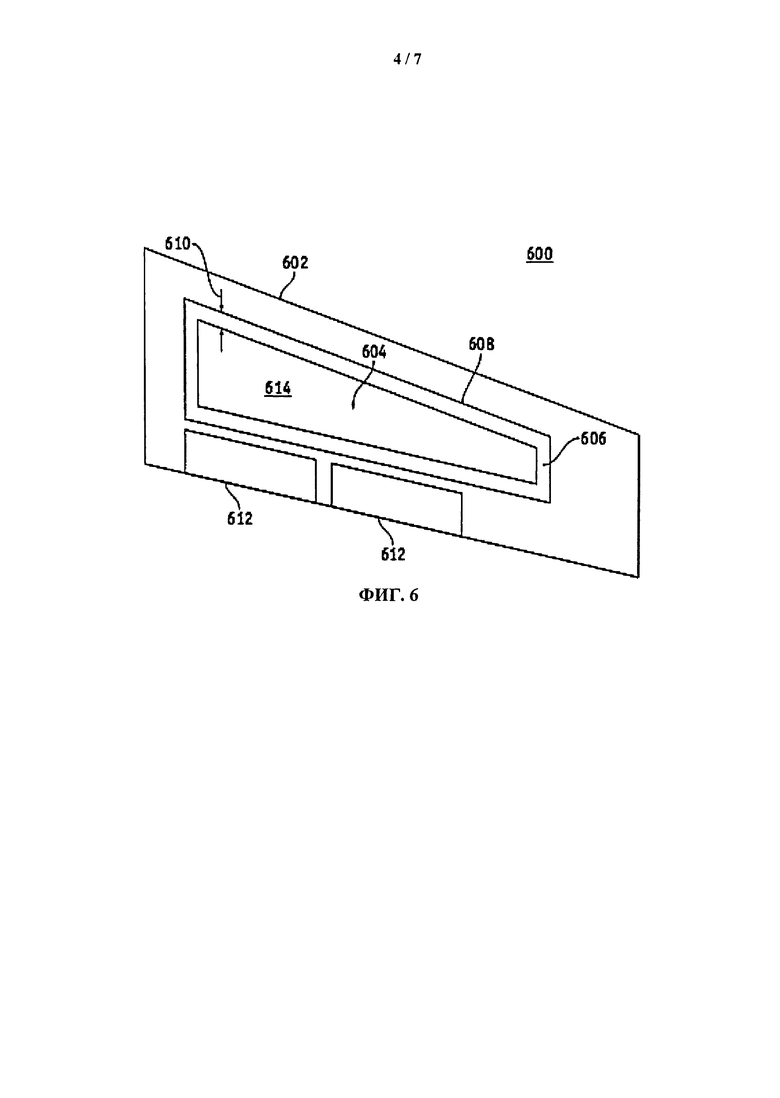
На фиг. 6 схематически показан вид сверху примера эластомерной конструкции на основе технологии получения непрерывного обвода, показывающего выполненную с возможностью удлинения и/или расширения блистерную поверхностную секцию на основе технологии получения непрерывного обвода, используемую для увеличения подъемной силы, действующей на крыло, для управления креном согласно варианту реализации настоящего изобретения.
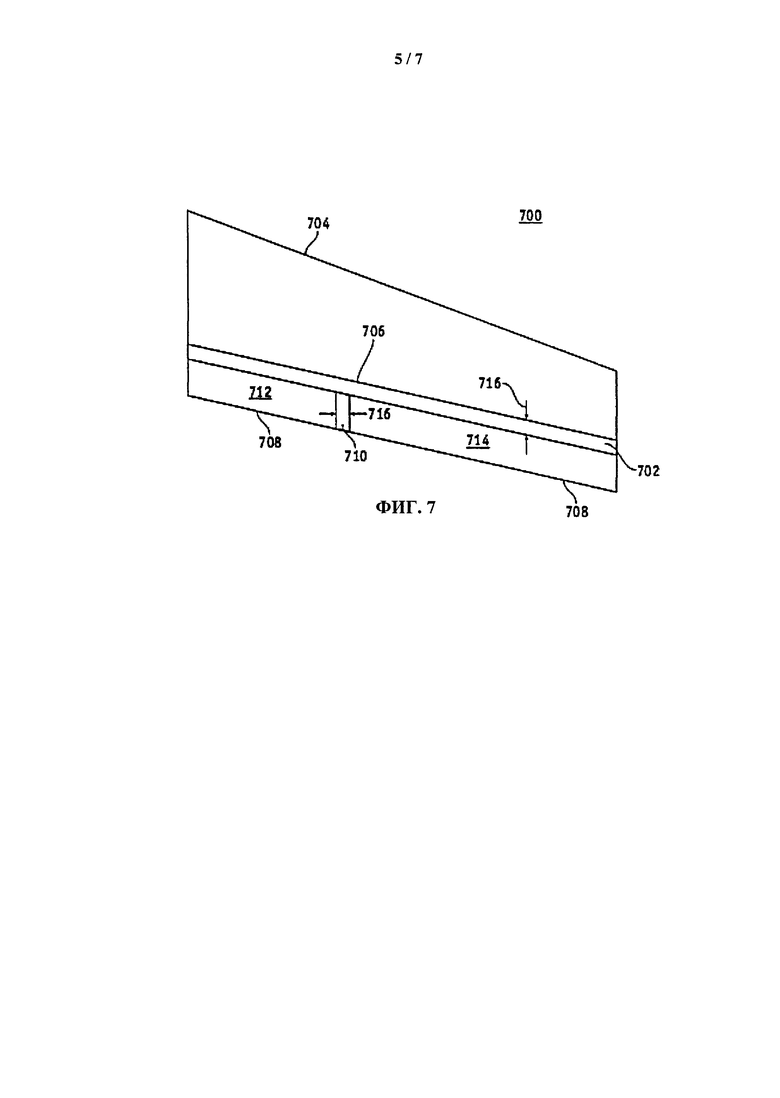
На фиг. 7 схематически показан вид сверху примера эластомерной конструкции на основе технологии получения непрерывного обвода, показывающего перемещаемую секцию задней кромки крыла на основе технологии получения непрерывного обвода, используемую для увеличения подъемной силы, действующей на крыло, для управления креном согласно варианту реализации настоящего изобретения.
На фиг. 8 показан пример блок-схемы способа управления эластомерной конструкцией на основе технологии получения непрерывного обвода согласно варианту реализации настоящего изобретения.
На фиг. 9 показан пример блок-схемы способа создания эластомерной конструкции на основе технологии получения непрерывного обвода согласно варианту реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Следующее подробное описание является иллюстративным и не предназначено для ограничения настоящего изобретения или применения и использования вариантов его реализации. Описания конкретных устройств, способов и случаев применения приведены только в качестве примеров. Модификации примеров, описанных в настоящей заявке, являются очевидными для специалистов, и общие принципы, изложенные заданные в настоящей заявке, могут быть использованы в других примерах и случаях применения без отступления от идеи и объема настоящего изобретения. Объем защиты настоящего изобретения определяется пунктами приложенной формулы и не ограничивается примерами, описанными и показанными в настоящей заявке.
Варианты реализации настоящего изобретения могут быть описаны в настоящей заявке в виде функциональных и/или логических блочных компонентов и различных этапов обработки. Следует отметить, что указанные блочные компоненты могут быть реализованы любым количеством аппаратных средств, программного обеспечения и/или микропрограммных компонентов, сформированных с возможностью выполнения указанных функций. Ради краткости известные способы и компоненты, относящиеся к эластомерам, управляющим поверхностям, технологии получения непрерывного обвода и другим функциональным аспектам систем (а также к отдельным рабочим элементам систем) не будут подробно описаны в настоящей заявке. Кроме того, для специалистов очевидно, что варианты реализации настоящего изобретения могут быть осуществлены в соединении с различными аппаратными средствами и программным обеспечением, и что варианты реализации, описанные в настоящей заявке, являются только примерами вариантов реализации настоящего изобретения.
Варианты реализации настоящего изобретения описаны в настоящей заявке в контексте неограничивающего применения, а именно, в контексте эластомерной управляющей структуры самолета. Однако варианты реализации настоящего изобретения не ограничиваются указанной авиационной эластомерной управляющей структурой, и способы, описанные в настоящей заявке, также могут быть использованы в других случаях применения. Например, помимо прочего варианты реализации могут быть применены в пилотируемом человеком и беспилотном наземном, воздушном, водном и подводном транспортном средстве.
Как может быть очевидным для специалиста после прочтения настоящего описания, изложенное ниже является только примерами и вариантами реализации настоящего изобретения, которые не ограничиваются действием в соответствии с указанными примерами. Могут быть использованы другие варианты реализации, и могут быть сделаны структурные изменения без отступления от объема защиты настоящего изобретения.
Варианты реализации настоящего изобретения, показанные более подробно на чертежах, могут быть описаны в контексте способа 100 (способ 100) изготовления и обслуживания самолета, как показано на фиг. 1, и самолета 200, показанного на фиг. 2. Во время предпроизводственной подготовки способ 100 может содержать этап 104, на котором проектируют и конструируют самолет 200, и этап 106, на котором закупают материалы. Во время изготовления, на этапе 108 изготавливают компоненты и сборочные узлы и на этапе 110 выполняют системную интеграцию самолета 200. После этого на этапе 112 сертифицируют и доставляют самолет 200 и на этапе 114 вводят его в эксплуатацию. Во время эксплуатации авиакомпанией самолета 200 на этапе 116 осуществляют регламентное техническое обслуживание и ремонт (который также может включать модификацию, модернизацию, переоборудование, и т.п.).
Каждый из этапов способа 100 может быть осуществлен или выполнен системным интегратором, третьим лицом и/или оператором (например, авиакомпанией). В целях наглядности настоящего описания понятие "системный интегратор" может включать помимо прочего любое количество авиастроительных компаний и основных системных субподрядных компаний; понятие "третье лицо" может включать помимо прочего любое количество доставщиков, субподрядчиков и поставщиков; и понятие "оператор" может включать помимо прочего авиакомпанию, лизинговую компанию, военное ведомство, сервисную организацию и т.п.
Как показано на фиг. 2, самолет 200 изготовленный предложенным способом 100, может содержать каркас 218 с системами 220, внутреннюю часть 222 и упругую конструкцию 232 на основе технологии получения непрерывного обвода. Примеры систем 220 высокого уровня включают по меньшей мере одну двигательную установку 224, электрическую систему 226, гидравлическую систему 228 и климатическую систему 230. Также может быть включено любое количество других систем. Не смотря на то, что в настоящей заявке использован пример из авиастроения, варианты реализации настоящего изобретения могут быть применены в других отраслях.
Устройство и способы, описанные в настоящей заявке, могут быть использованы на любом по меньшей мере одном из этапов способа 100 изготовления и эксплуатации. Например, компоненты или сборочные узлы, используемые на этапе 108, могут быть изготовлены или сформированы способом, подобным способу изготовления компонентов или сборочных узлов на этапе 200 эксплуатации самолета. Кроме того, по меньшей мере один вариант реализации устройства, вариант реализации способа или их комбинация могут быть использованы, например, на этапах 108 и 110 изготовления, в результате чего по существу может быть ускорена сборка или уменьшена стоимость самолета 200. Аналогично, по меньшей мере один вариант реализации устройства, вариант реализации способа или их комбинация могут быть использованы, например и помимо прочего, на этапе 116 обслуживания и ремонта самолета 200.
При перемещении управляющих полетом поверхностей обычно образуются зазоры, которые в свою очередь вызывают дополнительный акустический шум в корпусе самолета, ухудшают аэродинамику или увеличивают аэродинамическое сопротивление. Согласно вариантам реализации настоящего изобретения предложена эластомерная конструкция на основе технологии получения непрерывного обвода (СМТ-технологии) сопрягающей поверхности для управляющих поверхностей (упругих поверхностей управления), которая смягчает ухудшающее влияние указанных зазоров. Упругие управляющие поверхности очень "плавно" управляют перемещением транспортного средства, такого как самолет, без образования зазоров, в результате чего уменьшаются акустические шумы и достигается улучшенная аэродинамика. Упругие управляющие поверхности согласно вариантам реализации обеспечивают менее активированную управляющую поверхность, такую как управляющая полетом поверхность, окруженная эластомером, площадь которой соответствует обычной управляющей полетом поверхности, в результате чего уменьшается вес и, следовательно, расход энергии.
Кроме того, при использовании упругих управляющих поверхностей, описанных в настоящей заявке, направление полета во время управления самолетом может изменяться в форме тангажа, рыскания или крена без образования зазоров или краев. Таким образом, при необходимости изменения направления полета самолета достигается преимущество, состоящее в уменьшении акустических шумов и улучшении аэродинамики за счет усовершенствования акустических характеристик и снижения аэродинамического сопротивления.
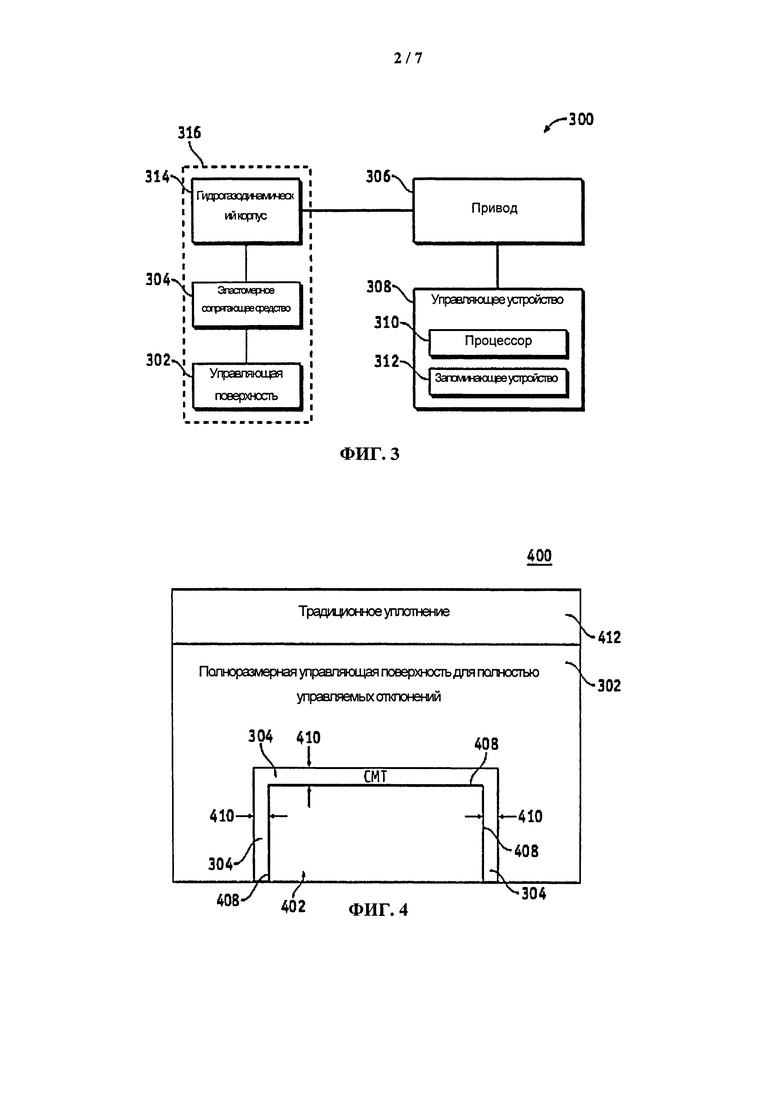
На фиг. 3 показан пример системы 300 для управления эластомерной конструкцией 316 на основе технологии получения непрерывного обвода согласно варианту реализации настоящего изобретения. Система 300 может содержать упругую конструкцию 316 на основе технологии получения непрерывного обвода, привод 306 и управляющее устройство 308.
Эластомерная конструкция 316 на основе технологии получения непрерывного обвода содержит управляющую поверхность 302, гидрогазодинамический корпус 314 и эластомерное сопрягающее средство 304.
Управляющая поверхность 302 соединена с гидрогазодинамическим корпусом 314. Управляющая поверхность 302 может содержать, например, помимо прочего створку шасси (не показана), управляющие полетом поверхности, такие как предкрылок, элерон, стабилизатор, руль направления, руль высоты, закрылок, интерцептор, хвостовой стабилизатор или другую управляющую поверхность, выполненную с возможностью перемещения сквозь текучую среду, такую как воздух, вода или другая среда, для изменения пути, маршрута или перемещения транспортного средства или конструкции.
Эластомерное сопрягающее средство 304 соединено с управляющей поверхность 302 и гидрогазодинамическим корпусом 314 таким образом, что стыковой зазор 410 (как показано на фиг. 4), образованный при перемещении управляющей поверхности 302 относительно гидрогазодинамического корпуса 314, является заполненным. Эластомерное сопрягающее средство 304 содержит эластомерный материал, который часто используют вместо резины, или который является резиноподобным и предпочтительно выполнен с возможностью вулканизации. Указанный эластомерный материал является эластичным, имеет способность возвращения к исходной форме после удаления нагрузки и содержит различные компоненты (например, является полимером). Эластомеры представляют собой аморфные полимеры, существующие при температурах, которые выше температуры их перехода в стеклообразное состояние и при которых возможно значительное сегментарное перемещение. Таким образом, при температуре окружающей среды указанные резиновые материалы являются относительно мягкими (например, Е≈3 МРа, где Е - модуль упругости в мегапаскалях (МПа или Н/мм2)) и деформируемыми. В основном указанные резиновые материалы используются для уплотнения, склеивания, а также для формования гибких деталей.
Эластомеры в целом являются термореактивными пластиками (требующими вулканизации), но также могут быть термопластичными материалами. Длинные молекулярные цепи полимера формируют поперечные связи во время обработки и образуют гибкую природу материала. Молекулярная структура эластомеров может быть представлена в форме "спагетти с фрикадельками", где фрикадельки изображают поперечные связи. Эластомерное сопрягающее средство 304 может содержать любой известный эластомер, такой как помимо прочего натуральный каучук, полиизопрен, бутилкаучук, полибутадиен, стирол-бутадиеновый каучук или SBR, нитриловый каучук, также именующийся как бутадиенакрилонитрильный каучук, хлоропреновый каучук, вулканизирующийся при комнатной температуре силикон или другие эластомеры.
Гидрогазодинамический корпус 314 может содержать, например, помимо прочего фюзеляж, крыло, переднее оперение, горизонтальный стабилизатор или другой гидрогазодинамический корпус, выполненный с возможностью перемещения сквозь текучую среду, такую как без ограничения воздух, вода или другая среда. Гидрогазодинамический корпус 314 может быть соединен с транспортным средством или другой конструкцией. Транспортное средство может представлять собой, например, помимо прочего, пилотируемое человеком и беспилотное наземное, воздушное, космическое, надводное, подводное или другое транспортное средство.
Привод 306 выполнен с возможностью изменения формы (например, сгибанием, отклонением, удлинением, расширением, изменением формы) управляющей поверхности 302 в ответ на активирующую команду управляющее устройства 308. Активирующая команда может быть создана помимо прочего путем ввода данных пилотом/авиадиспетчером, предварительно запрограммированным входным сигналом от процессора 310 управляющее устройства 308 в случае автоматизированного управления, или в результате комбинации вышеуказанного. Для активации управляющей поверхности 302 может быть использован любой известный привод. Например, может быть использован помимо прочего гидропривод, пьезоэлектрический привод, подпружиненный механизм, блокировочный механизм обратного потока, пиротехнический привод, привод на основе сплава с памятью формы или другой привод.
Управляющее устройство 308 может содержать, например, помимо прочего процессор 310, запоминающее устройство 312 или другие блоки. Управляющее устройство 308 может быть реализовано, например, помимо прочего как часть авиационной системы, централизованного авиационного процессора, подсистемного вычислительного блока, выделенного для управляющей поверхности 302, или в другой форме. Управляющее устройство 308 выполнено с возможностью управления приводом 306 для изменения формы и/или положения управляющей поверхности 302 согласно различным эксплуатационным режимам. Указанные эксплуатационные режимы могут включать, например, помимо прочего полетные режимы, наземные режимы или другие режимы. Полетные режимы могут включать, например, помимо прочего взлет, крейсерский режим, заход на посадку, посадку или другие полетные режимы. Наземная эксплуатация может содержать, например помимо прочего, аэродинамическое торможение после приземления или другие наземные режимы. Управляющее устройство 308 может быть расположено на некотором расстоянии от привода 306 или может быть соединено с приводом 306.
Процессор 310 содержит алгоритм обработки, который сформирован с возможностью осуществления функций, способов и обработки задач, связанных с работой системы 300. В частности, алгоритм обработки сформирован с возможностью поддержки системы 300, описанной в настоящей заявке. Например, процессор 310 может управлять приводом 306 для изменения положения управляющей поверхности 302 на основании различных полетных режимов.
В качестве процессора 310 могут быть использованы процессор общего назначения, ассоциативное запоминающее устройство, цифровой сигнальный процессор, прикладная специализированная интегральная схема, программируемая вентильная матрица, любое подходящее программируемое логическое устройство, дискретное вентильное или транзисторное логическое устройство, дискретные компоненты аппаратных средств или любая комбинация вышеуказанного, выполненная с возможностью выполнения функций, описанных в настоящей заявке. Таким образом, процессор может быть реализован в форме микропроцессора, управляющего устройства, управляющего микроустройства, машины состояний или тому подобного. Процессор также может быть осуществлен в форме комбинации вычислительных устройств, например, комбинации цифрового сигнального процессора и микропроцессора, нескольких микропроцессоров, по меньшей мере одного микропроцессора в соединении с ядром цифрового сигнального процессора или любой другой такой конструкции.
Запоминающее устройство 312 может содержать область хранения данных с памятью, отформатированной для поддержки работы системы 300. Запоминающее устройство 312 может быть выполнено с возможностью сохранения, поддерживания и передачи данных в случае необходимости для поддерживания функциональных средств системы 300. Например, в запоминающем устройстве 312 могут быть сохранены данные параметров полета или другие данные.
Согласно некоторым вариантам реализации запоминающее устройство 312 может содержать, например, помимо прочего, энергонезависимое запоминающее устройство (энергонезависимое полупроводниковое запоминающее устройство, жесткий диск, оптическое дисковое устройство и т.п.), запоминающее устройство с произвольной выборкой (например, SRAM, DRAM), или известный носитель данных в любой другой форме.
Запоминающее устройство 312 может быть соединено с процессором 310 и выполнено с возможностью сохранения, например, помимо прочего базы данных, компьютерной программы, которая выполняется процессором 310, операционной системы, прикладной программы, предварительных данных, используемых при выполнении программы и других приложений. Кроме того, запоминающее устройство 312 может представлять собой динамически обновляемую базу данных, содержащую таблицу для обновления базы данных, и т.п.
Запоминающее устройство 312 может быть соединено с процессором 310 таким образом, что процессор 310 может считывать информацию из запоминающего устройства 312 и записывать информацию в запоминающее устройство 312. Например, процессор 310 может иметь доступ к запоминающему устройству 312 для доступа к полетным параметрам, таким как скорость самолета, положение управляющих полетом поверхностей, угол атаки, число Маха, высота, или другим данным.
Например, процессор 310 и запоминающее устройство 312 могут быть выполнены в форме соответствующих прикладных специализированных интегральных схем (ASIC). Запоминающее устройство 312 также может быть встроено в процессор 310. Согласно одному варианту реализации запоминающее устройство 312 может содержать кэш-память для сохранения временных переменных или другой промежуточной информации во время выполнения команд, исполняемых процессором 310.
На фиг. 4 схематически показан вид сверху примера эластомерной конструкции 400 на основе технологии получения непрерывного обвода, в котором небольшая "малошумящая" управляющая поверхность 402 на основе технологии получения непрерывного обвода встроена в полноразмерную управляющую поверхность, такую как управляющая поверхность 302 согласно варианту реализации настоящего изобретения. Эластомерная конструкция 400 на основе технологии получения непрерывного обвода содержит "малошумящую" управляющую поверхность 402 на основе технологии получения непрерывного обвода, соединенную с управляющей поверхностью 302 посредством эластомерного сопрягающего средства 304. Управляющая поверхность 302 является полноразмерной управляющей поверхностью, выполненной с возможностью полного управляющего отклонения, и может быть соединена с гидрогазодинамическим корпусом 314. Управляющая поверхность 302 может содержать традиционное уплотнение 412. Согласно варианту реализации, показанному на фиг. 4, эластомерное сопрягающее средство 304 представляет собой армированную упругую панель на основе технологии получения непрерывного обвода, соединенную с тремя сторонами 408 "малошумящей" управляющей поверхности 402 на основе технологии получения непрерывного обвода и заполняющую соединительные зазоры 410. "Малошумящая" управляющая поверхность 402 на основе технологии получения непрерывного обвода содержит активируемую, выполненную с возможностью перемещения поверхность, которая при ее активировании и использовании в "малошумящем режиме" может перемещаться, например, помимо прочего на примерно 2 градуса, примерно 3 градуса, или в другом подходящем диапазоне.
На фиг. 5 схематически показан вид сверху примера эластомерной конструкции 500 на основе технологии получения непрерывного обвода с "малошумящим" концевым обтекателем 508 крыла на основе технологии получения непрерывного обвода (концевым СМТ-обтекателем 508 крыла) для управления креном согласно варианту реализации настоящего изобретения. Эластомерное сопрягающее средство 502, содержащее уплотнение на основе технологии получения непрерывного обвода, соединено с (подвижным) концевым обтекателем 504 крыла 506, имеющего неизменяемую геометрию, для управления креном. Эластомерное сопрягающее средство 502 обеспечивает соединение 514 между концевым обтекателем 504 крыла и фиксированным крылом 506 и таким образом формирует концевой СМТ-обтекатель 508 крыла для управления креном. Эластомерная конструкция 500 на основе технологии получения непрерывного обвода также может содержать другие управляющие поверхности 512.
Концевой СМТ-обтекатель 508 крыла используется для управления креном, причем концевой обтекатель 504 крыла является шарнирным, подобно стабилизатору или поворотному стабилизатору в некоторых самолетах. Таким образом, концевой СМТ-обтекатель 508 крыла может действовать в качестве горизонтального стабилизатора или управляемого стабилизатора для управляющей поверхности консольной части фиксированного крыла 506. Эластомерное сопрягающее средство 502 между фиксированным крылом 506 и подвижным концевым обтекателем 504 содержит армированную упругую панель, которая обеспечивает управление креном без образования зазоров, таких как стыковой зазор 510. Концевой СМТ-обтекатель 508 может иметь размер, подходящий для вызывания крена.
На фиг. 6 схематически показан вид сверху эластомерной конструкции 600 на основе технологии получения непрерывного обвода с несущей поверхностью 604, которая содержит "малошумящую", выполненную с возможностью удлинения и/или расширения блистерную секцию 614 поверхности на основе технологии получения непрерывного обвода (блистерная поверхностная секция 614), используемую для увеличения подъемной силы на крыле 602 для управления креном, согласно варианту реализации настоящего изобретения. Несущая поверхность 604 изменяет толщину крыла 602 за счет удлиняющего и/или расширяющего перемещения блистерной поверхностной секции 614 для изменения подъемной силы и инициирования крена самолета в полете. Эластомерная конструкция 600 на основе технологии получения непрерывного обвода также может содержать другие управляющие поверхности 612.
Несущая поверхность 604 содержит часть конструкции, такой как блистерная поверхностная секция 614, которая может быть встроена в верхнюю или нижнюю поверхность крыла 602 и выполнена с возможностью удлинения и/или расширения за пределы обычного обвода крыла 602 для увеличения толщины крыла 602 и таким образом увеличения подъемной силы, действующей на крыло 602, для инициирования момента вращения. Несущая поверхность, такая как блистерная поверхностная секция 614, соединена со всех сторон с несущей поверхностью 604 посредством эластомерного сопрягающего средства 606 вдоль периметра 608 несущей поверхности 604. Таким образом, площадь несущей поверхности 604 увеличивается без образования соединительных зазоров 610 на крыле 602. Несущая поверхность 604 должна иметь размер, достаточный для вызывания крена.
При использовании, несущая поверхность 604 повторяет контур крыла 602 в первом положении управляющей поверхности и изменяет толщину крыла 602 во втором положении управляющей поверхности для изменения подъемной силы, действующей на крыло 602, и вызывания крена самолета в полете. Второе положение управляющей поверхности по существу может быть выбрано из большого количества положений.
На фиг. 7 схематически показан вид сверху эластомерной конструкции 700 на основе технологии получения непрерывного обвода, содержащей "малошумящую" перемещаемую секцию 706 задней кромки на основе технологии получения непрерывного обвода, установленную в крыле 704 для увеличения подъемной силы и таким образом управления креном, согласно варианту реализации настоящего изобретения.
Согласно одному варианту реализации эластомерная конструкция 700 на основе технологии получения непрерывного обвода содержит "малошумящую" перемещаемую секцию 706 задней кромки на основе технологии получения непрерывного обвода (перемещаемую заднюю СМТ-кромку 706), соединенную с крылом 704 посредством эластомерного сопрягающего средства 702, которое может перемещаться в заднем направлении для увеличения площади крыла 704 с одной стороны и таким образом создания дополнительной подъемной силы и вызывания соответствующего крена. Эластомерное сопрягающее средство 702 может быть соединено с верхней и/или нижней частью крыла 704.
Согласно другому варианту реализации перемещаемая задняя СМТ-кромка 706 может содержать расположенную по всему размаху крыла комбинацию закрылка и элерона 708, содержащую закрылок 712 и элерон 714, соединенные с крылом 704 посредством наружно армированной эластомерной панели, такой как эластомерное сопрягающее средство 702. Таким образом, секция крыла 704 может быть удлинена в заднем направлении для увеличения полной площади крыла 704 и, таким образом, увеличения подъемной силы, действующей на крыло 704, и вызывания момента вращения таким образом, что стыковой зазор 716 (например, подобный первому соединительному зазору согласно одному варианту реализации), образованный перемещением перемещаемой задней СМТ-кромки 706 относительно крыла 704, является заполненным.
Согласно другому варианту реализации расположенная по всему размаху крыла комбинация закрылка и элерона 708 может быть сегментирована вдоль размаха крыла 704 с использованием эластомерных панелей, таких как эластомерное сопрягающее средство 710 (например, подобная второму эластомерному сопрягающему средству согласно одному варианту реализации), вставленных между закрылком 712 (например, подобным первой управляющей поверхности согласно одному варианту реализации) и элероном 714 (например, подобным второй управляющей поверхности согласно одному варианту реализации) для обеспечения гибкости. Закрылок 712 и элерон 714 соединены с крылом 704 (например, подобным аэродинамическому корпусу согласно одному варианту реализации) посредством эластомерного сопрягающего средства 702. Эластомерное сопрягающее средство 710 (второе эластомерное сопрягающее средство) соединено с закрылком 712 (первой управляющей поверхностью), элероном 714 (второй управляющей поверхностью) и эластомерным сопрягающим средством 702 таким образом, что стыковой зазор 716 (например, подобный второму соединительному зазору согласно одному варианту реализации), образованный перемещением закрылка 712 (первой управляющей поверхностью) относительно элерона 714 (второй управляющей поверхности), является заполненным.
Показанные варианты реализации являются только примерами, и для специалистов очевидно, что могут быть использованы многочисленные конструкции передних и задних кромок крыла, и что таким образом могут быть использованы многочисленные конструкции соответствующих поверхностей и упругих сопрягающих поверхностей. Кроме того, как указано выше, описанные варианты реализации не ограничиваются авиационными конструкциями и также могут быть применены, например, помимо прочего к любым пилотируемым и беспилотным, наземным, воздушным, надводным и подводным транспортным средствам.
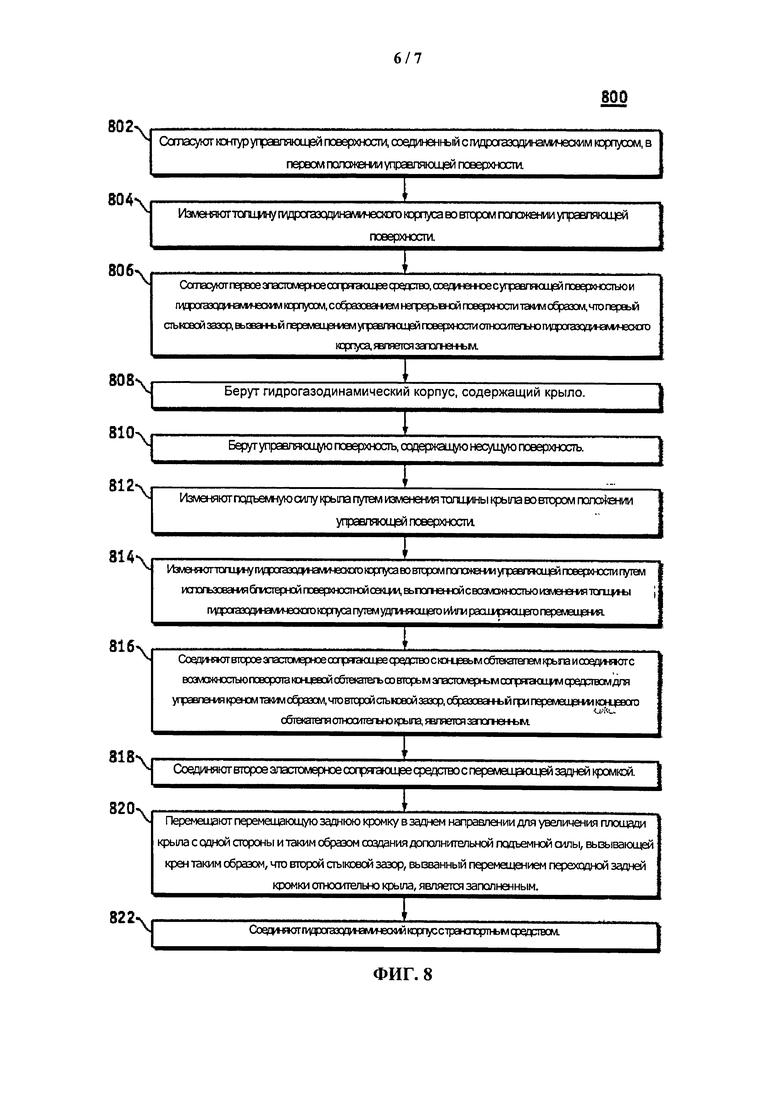
На фиг. 8 показан пример блок-схемы способа 800 управления гидрогазодинамическим корпусом путем использования эластомерной управляющей поверхности на основе технологии получения непрерывного обвода согласно варианту реализации настоящего изобретения. Различные этапы способа 800 могут быть выполнены путем использования механических средств, программного обеспечения, аппаратных средств, программируемого оборудования, читаемых компьютером носителей, содержащих исполняемые компьютером команды для осуществления предложенного способа, или любой комбинации перечисленного выше. Следует отметить, что способ 800 может содержать любое количество дополнительных или альтернативных этапов, причем этапы, показанные на фиг. 8, не обязательно должны быть выполнены в показанном на чертеже порядке, и способ 800 может быть встроен в более общий процесс или способ, согласно которому используются дополнительные функциональные средства, не описанные подробно в настоящей заявке.
В целях ясности изложения приведенное ниже описание способа 800 может быть отнесено к элементам, описанным выше со ссылкой на фиг. 3-7. Согласно некоторым вариантам реализации этапы способа 800 могут быть выполнены с использованием различных элементов системы 300, таких как: эластомерная конструкция 316 на основе технологии получения непрерывного обвода, привод 306, управляющее устройство 308 и т.п. В способе 800 могут быть использованы функции и конструкции, подобные описанным в вариантах реализации со ссылкой на фиг. 3-7. Таким образом, общие особенности, функции и элементы не будут повторно описаны ниже.
Способ 800 может быть начат с этапа 802, на котором согласуют контур управляющей поверхности, такой как несущая поверхность 604, соединенной с гидрогазодинамическим корпусом, таким как крыло 602, в первом положении управляющей поверхности.
На этапе 804 способа 800 изменяют толщину гидрогазодинамического корпуса во втором положении управляющей поверхности.
На этапе 806 способа 800 согласуют первое эластомерное сопрягающее средство, такое как эластомерное сопрягающее средство 606, соединенное с управляющей поверхностью и гидрогазодинамическим корпусом, с образованием непрерывного обвода таким образом, что первый стыковой зазор, такой как стыковой зазор 610, вызванный перемещением управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
На этапе 808 способа 800 берут гидрогазодинамический корпус, содержащий крыло, такое как крыло 506/602.
На этапе 810 способа 800 берут управляющую поверхность 302, содержащую несущую поверхность 604.
Как описано выше, согласно некоторым вариантам реализации управляющая поверхность 302 содержит концевой обтекатель 504 крыла, выполненный с возможностью поворота рядом с эластомерным сопрягающим средством 502, для управления креном таким образом, что стыковой зазор 510, вызванный перемещением концевого обтекателя 504 относительно крыла 506, является заполненным. Как описано выше, согласно некоторым вариантам реализации управляющая поверхность содержит перемещаемую заднюю кромку, такую как перемещаемая задняя СМТ-кромка 706, выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла 704 с одной стороны и таким образом создания дополнительной подъемной силы и вызывания соответствующего крена таким образом, что стыковой зазор 716, образованный перемещением перемещаемой задней кромки 706 относительно крыла 704, является заполненным.
На этапе 812 способа 800 изменяют подъемную силу крыла 602 путем изменения толщины крыла 602 во втором положении управляющей поверхности.
На этапе 814 способа 800 изменяют толщину крыла 602 (например, таким образом изменяют подъемную силу крыла 602) во втором положении управляющей поверхности путем использования блистерной поверхностной секции, такой как блистерная секция 614, выполненной с возможностью изменения толщины гидрогазодинамического корпуса путем удлиняющего и/или расширяющего перемещения.
На этапе 816 способа 800 соединяют второе эластомерное сопрягающее средство, такое как эластомерное сопрягающее средство 502, с концевым обтекателем крыла, таким как концевой обтекатель 504 (подобный управляющей поверхности 302 согласно одному варианту реализации) крыла 506, и соединяют с возможностью поворота концевой обтекатель 504 со вторым эластомерным сопрягающим средством для обеспечения возможности управления креном таким образом, что второй стыковой зазор, такой как стыковой зазор 510, образованный при перемещении концевого обтекателя 504 относительно крыла 506, является заполненным.
На этапе 818 способа 800 соединяют второе эластомерное сопрягающее средство, такое как эластомерное сопрягающее средство 702, с перемещаемой задней кромкой, такой как перемещаемая задняя СМТ-кромка 706 (подобная управляющей поверхности 302 согласно одному варианту реализации).
На этапе 820 способа 800 перемещают перемещаемую заднюю кромку в заднем направлении для увеличения площади крыла 704 с одной стороны и таким образом создания дополнительной подъемной силы, вызывающей крен таким образом, что второй стыковой зазор, такой как стыковой зазор 716, вызванный перемещением перемещаемой задней кромки относительно крыла 704, является заполненным.
На этапе 822 способа 800 соединяют гидрогазодинамический корпус с транспортным средством, таким как самолет 200.
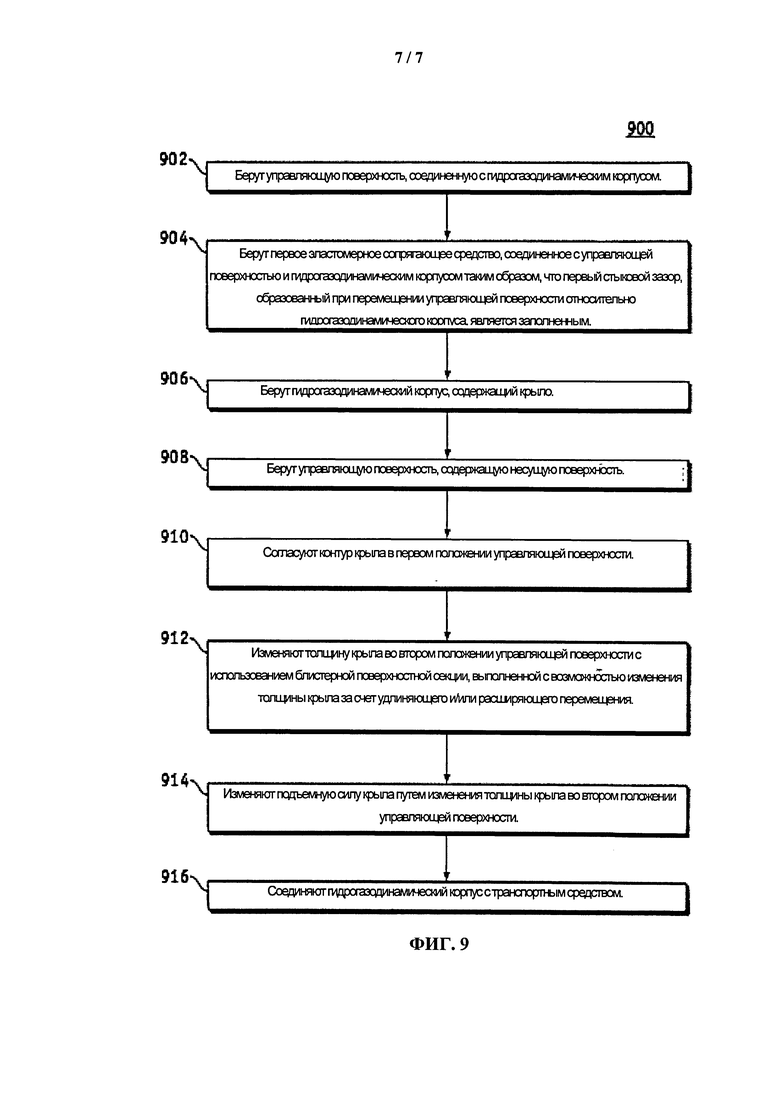
На фиг. 9 показан пример блок-схемы способа 900 формирования эластомерной конструкции на основе технологии получения непрерывного обвода согласно одному варианту реализации настоящего изобретения. Различные этапы, выполненные в рамках способа 900, могут быть выполнены с использованием механических средств, программного обеспечения, аппаратных средств, программируемого оборудования, читаемого компьютером носителя, содержащего исполняемые компьютером команды для осуществления предложенного способа, или любой комбинации перечисленного выше. Следует отметить, что способ 900 может содержать любое количество дополнительных или альтернативных этапов, причем этапы, показанные на фиг. 9, не обязательно должны быть выполнены в показанном на чертеже порядке, и способ 900 может быть встроен в более общий процесс или способ, согласно которому используются дополнительные функциональные средства, не описанные подробно в настоящей заявке
В целях ясности в следующем ниже описании способа 900 могут быть сделаны ссылки на элементы, описанные выше и показанные на фиг. 3-7. Согласно некоторым вариантам реализации части способа 900 могут быть выполнены с использованием различных элементов системы 300, таких как: эластомерная конструкция 316 на основе технологии получения непрерывного обвода, привод 306, управляющее устройство 308 и т.п. В способе 900 могут быть использованы функции и конструкции, подобные описанным в вариантах реализации и показанным на фиг. 3-7. Таким образом, общие особенности, функции и элементы не будут повторно описаны ниже.
Способ 900 может быть начат с этапа 902, на котором берут управляющую поверхность, такую как управляющая поверхность 302, соединенную с гидрогазодинамическим корпусом, таким как гидрогазодинамический корпус 314.
На этапе 904 способа 900 берут первое эластомерное сопрягающее средство, такое как эластомерное сопрягающее средство 304, соединенное с управляющей поверхностью 302 и гидрогазодинамическим корпусом 314 таким образом, что стыковой зазор, такой как стыковой зазор 410, образованный при перемещении управляющей поверхности 302 относительно гидрогазодинамического корпуса, является заполненным.
На этапе 906 способа 900 берут гидрогазодинамический корпус 314, содержащий крыло, такое как крыло 602.
На этапе 908 способа 900 берут управляющую поверхность 302, содержащую несущую поверхность, такую как несущая поверхность 604.
На этапе 910 способа 900 согласуют контур крыла 602 в первом положении управляющей поверхности.
На этапе 912 способа 900 изменяют толщину крыла 602 во втором положении управляющей поверхности с использованием блистерной поверхностной секции, такой как блистерная поверхностная секция 614, выполненной с возможностью изменения толщины крыла 602 за счет удлиняющего и/или расширяющего перемещения.
На этапе 914 способа 900 изменяют подъемную силу крыла 602 путем изменения толщины крыла 602 во втором положении управляющей поверхности.
На этапе 916 способа 900 соединяют гидрогазодинамический корпус 314 с транспортным средством, таким как самолет 200.
Таким образом, перемещением транспортного средства, такого как самолет, точно/бесшумно управляют без образования зазоров и для снижения акустического шума и достижения улучшенной аэродинамики. Отсутствие зазоров или краев может снизить акустический шум и улучшить аэродинамические характеристики или уменьшить аэродинамическое сопротивление. Например, во время захода на посадку для приземления, зазоры перекрываются, в результате чего уменьшается шум, возникающий во время перемещения управляющих полетом поверхностей при тангаже и крене для изменения направления полета. Кроме того, управляющие полетом поверхности, окруженные эластомером, могут иметь уменьшенную площадь по сравнению с управляющими полетом поверхностями, не окруженными эластомером, и в то же время выполнять функции, по существу эквивалентные функциям управляющих полетом поверхностей, не окруженных эластомером.
В приведенном выше описании сделаны ссылки на элементы, узлы или особенности, "соединенные" или "связанные" вместе. Использованный в настоящей заявке термин "соединенный" означает, что один элемент или узел или одна особенность непосредственно соединены (или непосредственно связаны) с другими элементом, узлом или особенностью, и не обязательно механическим способом, если явно не указано иное. Аналогично, если явно не указано иное, термин "связанный" означает, что один элемент или узел или одна особенность прямо или косвенно соединены (или прямо или косвенно сообщаются) с другими элементом, узлом или особенностью, и не обязательно механическим способом. Таким образом, несмотря на то, что на фиг. 3-7 показаны примеры расположения элементов, дополнительные промежуточные элементы, устройства, особенности или компоненты могут быть использованы в вариантах реализации настоящего изобретения.
Термины и фразы, использованные в настоящем документе и его вариантах, если явно не указано иное, должны рассматриваться как допускающие изменения, но не как ограничивающие. Например, термин "включая" должен быть истолкован как означающий "включая без ограничений" или тому подобное; термин "пример" используется для обозначения примеров объекта описания без их исчерпывающего или ограничивающего перечисления; прилагательные, такие как "обычный", "традиционный", "нормальный", "стандартный", "известный", и подобные термины не должны толковаться как ограничение объекта описания в данный момент времени или объекта, доступного к данному моменту времени, но вместо этого должны быть истолкованы как охватывающие обычные, традиционные, нормальные или стандартные технологии, которые могут быть доступными или известными в настоящее время или в будущем.
Аналогично, соединение описанных объектов союзом "и" в группе не должно толковаться как требование обязательного наличия каждого из перечисленных объектов в указанной группе, но напротив должно быть истолковано как соединение союзами "и/или", если явно не указано иное. Аналогично, соединение объектов союзом "или" в группе не должно быть истолковано как взаимоисключающее требование для указанной группы, но напротив должно быть истолковано как соединение союзами "и/или", если явно не указано иное.
Кроме того, не смотря на то, что объекты, элементы или компоненты в настоящей заявке могут быть описаны или заявлены в единственном числе, множественное число также должно быть включено в объем защиты настоящего изобретения, если явно не указано ограничение единственным числом. Использование в некоторых случаях расширяющих слов и фраз, таких как "по меньшей мере один", "как минимум", "помимо прочего" или других подобных фраз не должно быть истолковано как означающее более узкое применение или требование в случаях, в которых могут отсутствовать указанные расширяющие фразы. Термин "примерно", использованный вместе с числовым значением или диапазоном, должен быть истолкован как охватывающий значения, вытекающие из погрешности эксперимента, которая может возникать при проведении измерений.
Согласно одному аспекту настоящего изобретения предложена эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, содержащая: первую управляющую поверхность, соединенную с гидрогазодинамическим корпусом; и первое эластомерное сопрягающее средство, соединенное с первой управляющей поверхностью и гидрогазодинамическим корпусом таким образом, что первый стыковой зазор, образованный при перемещении первой управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой гидрогазодинамический корпус соединен с транспортным средством.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой транспортное средство является самолетом.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, дополнительно содержащая: вторую управляющую поверхность, соединенную с гидрогазодинамическим корпусом; и второе эластомерное сопрягающее средство, соединенное с первой управляющей поверхностью и второй управляющей поверхностью таким образом, что второй стыковой зазор, образованный при перемещении первой управляющей поверхности относительно второй управляющей поверхности, является заполненным.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой: гидрогазодинамический корпус содержит крыло; и первая управляющая поверхность содержит несущую поверхность, выполненную с возможностью: согласования с контуром крыла в первом положении управляющей поверхности и изменения толщины крыла во втором положении управляющей поверхности для изменения подъемной силы, действующей на указанное крыло.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой несущая поверхность содержит блистерную поверхностную секцию, выполненную с возможностью изменения толщины крыла путем по меньшей мере одного перемещения, выбранного из группы, содержащей: удлинение блистерной поверхностной секции и расширение блистерной поверхностной секции.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой толщина крыла во втором положении инициирует крен самолета в полете.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше в которой: гидрогазодинамический корпус содержит крыло; и первая управляющая поверхность содержит концевой обтекатель крыла, соединенный с возможностью поворота на эластомерном сопрягающем средстве, для управления креном.
Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, описанная выше, в которой: гидрогазодинамический корпус содержит крыло; и первая управляющая поверхность содержит перемещаемую заднюю кромку, выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла с одной стороны и таким образом создания дополнительной подъемной силы и инициирования соответствующего крена.
Согласно аспекту настоящего изобретения предложен способ создания эластомерной управляющей поверхности на основе технологии получения непрерывного обвода, содержащий этапы, на которых: берут управляющую поверхность, соединенную с гидрогазодинамическим корпусом, и соединяют эластомерное сопрягающее средство с указанной управляющей поверхностью и гидрогазодинамическим корпусом таким образом, что стыковой зазор, образованный при перемещении управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Способ, описанный выше, дополнительно содержащий этапы, на которых: берут гидрогазодинамический корпус, содержащий крыло, и берут управляющую поверхность, содержащую несущую поверхность.
Способ, описанный выше, дополнительно содержащий этапы, на которых: согласуют контур крыла в первом положении управляющей поверхности и изменяют толщину крыла во втором положении управляющей поверхности путем использования блистерной поверхностной секции, выполненной с возможностью изменения толщины крыла по меньшей мере одним перемещением, выбранным из группы, содержащей: удлинение блистерной поверхностной секции и расширение блистерной поверхностной секции.
Способ, описанный выше, дополнительно содержащий этап, на котором изменяют подъемную силу крыла посредством изменения толщины крыла во втором положении управляющей поверхности.
Способ, описанный выше, дополнительно содержащий этап, на котором соединяют гидрогазодинамический корпус с транспортным средством.
Способ, описанный выше, согласно которому: гидрогазодинамический корпус содержит крыло, и управляющая поверхность содержит концевой обтекатель крыла, соединенный с возможностью поворота на эластомерном сопрягающем средстве, для обеспечения управления креном таким образом, что стыковой зазор, образованный при перемещении концевого обтекателя относительно крыла, является заполненным.
Способ, описанный выше, согласно которому: гидрогазодинамический корпус содержит крыло, и управляющая поверхность содержит перемещаемую заднюю кромку, выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла с одной стороны и таким образом создания дополнительной подъемной силы и инициирования соответствующего крена таким образом, что стыковой зазор, образованный при перемещении перемещаемой задней кромки относительно крыла, является заполненным.
Согласно аспекту настоящего раскрытия предложен способ управления подъемной силой гидрогазодинамического корпуса путем использования эластомерной управляющей поверхности на основе технологии получения непрерывного обвода, содержащий этапы, на которых: согласуют контур управляющей поверхности, соединенной с гидрогазодинамическим корпусом в первом положении управляющей поверхности, изменяют толщину гидрогазодинамического корпуса во втором положении управляющей поверхность и согласуют эластомерное сопрягающее средство, соединенное с управляющей поверхностью и гидрогазодинамическим корпусом, с образованием непрерывного обвода корпуса таким образом, что стыковой зазор, образованный при перемещении управляющей поверхности относительно гидрогазодинамического корпуса, является заполненным.
Способ, описанный выше, дополнительно содержащий этапы, на которых: берут гидрогазодинамический корпус, содержащий крыло, и берут управляющую поверхность, содержащую несущую поверхность.
Способ, описанный выше, дополнительно содержащий этап, на котором изменяют подъемную силу крыла путем изменения толщины крыла во втором положении управляющей поверхности.
Способ, описанный выше, согласно которому на этапе изменения дополнительно изменяют толщину гидрогазодинамического корпуса во втором положении управляющей поверхности путем использования блистерной поверхностной секции, выполненной с возможностью изменения толщины гидрогазодинамического корпуса по меньшей мере одним перемещением, выбранным из группы, содержащей: удлинение блистерной поверхностной секции и расширение блистерной поверхностной секции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОДИМЫЙ В ДЕЙСТВИЕ ПОВОРОТОМ ЭЛЕРОН, УСТАНОВЛЕННЫЙ С ЗАЗОРОМ И СОЗДАЮЩИЙ БОЛЬШУЮ ПОДЪЕМНУЮ СИЛУ | 2013 |
|
RU2625384C2 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| МНОГОРАЗОВЫЙ РАКЕТНО-АВИАЦИОННЫЙ МОДУЛЬ И СПОСОБ ЕГО ВОЗВРАЩЕНИЯ НА КОСМОДРОМ | 2010 |
|
RU2442727C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2518143C2 |
| СПОСОБ СТАРТА АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ С ВОЗДУШНО-РЕАКТИВНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 2006 |
|
RU2314481C2 |
| Адаптивное крыло с гибкой бесщелевой механизацией | 2022 |
|
RU2784222C1 |
| СВЕРХЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2015 |
|
RU2619361C2 |
| ПЛАНЕР КРЫЛАТОЙ РАКЕТЫ | 2004 |
|
RU2287771C2 |
Группа изобретений относится к поверхностям, управляющим полетом. Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода содержит первую управляющую поверхность (712), соединенную с гидрогазодинамическим корпусом (704); и первое эластомерное сопрягающее средство (702), соединенное с первой управляющей поверхностью (712) и гидрогазодинамическим корпусом (704) таким образом, что первый стыковой зазор (716), образованный при перемещении первой управляющей поверхности (712) относительно гидрогазодинамического корпуса (704), является заполненным. Гидрогазодинамический корпус (704) содержит крыло. Первая управляющая поверхность (712) содержит перемещаемую заднюю кромку (706), выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла с одной стороны и таким образом создания дополнительной подъемной силы и инициирования соответствующего крена. Способ характеризует создание эластомерной управляющей поверхности. Группа изобретений направлена на улучшение аэродинамических характеристик. 2 н. и 12 з.п. ф-лы, 9 ил.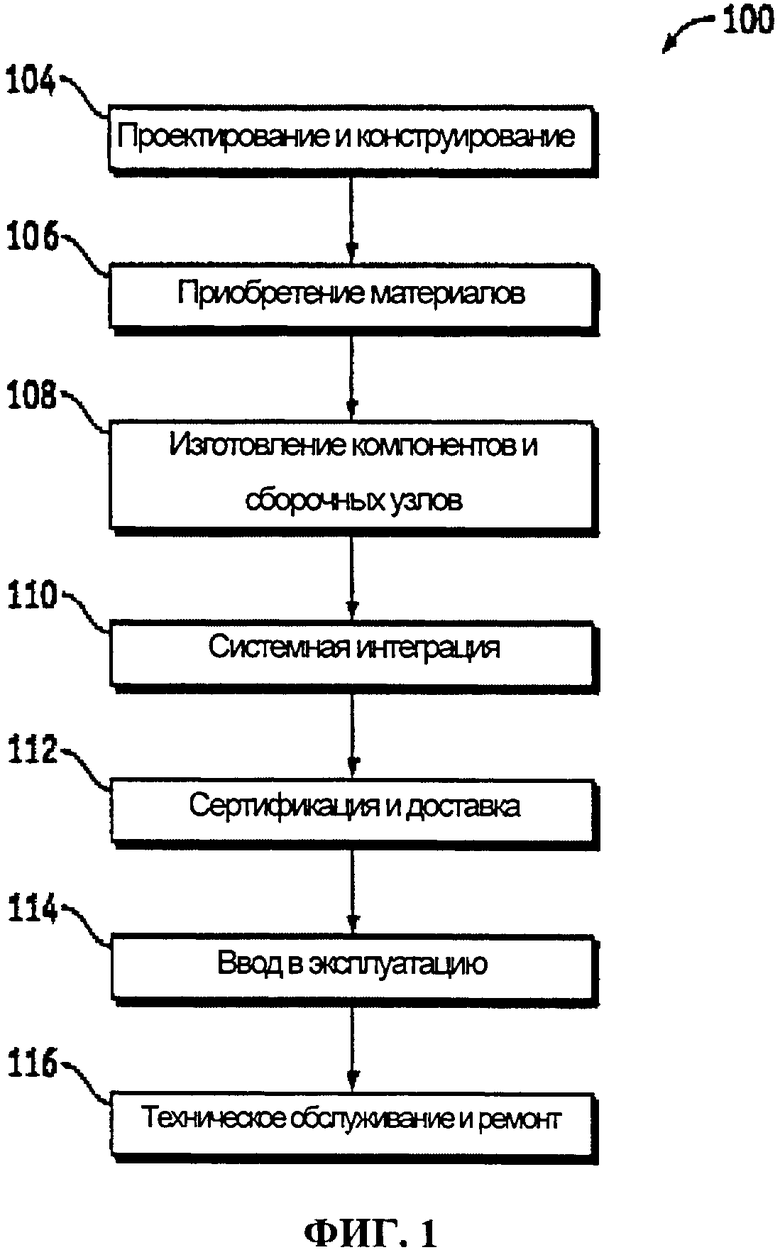
1. Эластомерная управляющая поверхность на основе технологии получения непрерывного обвода, содержащая:
первую управляющую поверхность (712), соединенную с гидрогазодинамическим корпусом (704); и
первое эластомерное сопрягающее средство (702), соединенное с первой управляющей поверхностью (712) и гидрогазодинамическим корпусом (704) таким образом, что первый стыковой зазор (716), образованный при перемещении первой управляющей поверхности (712) относительно гидрогазодинамического корпуса (704), является заполненным, причем
гидрогазодинамический корпус (704) содержит крыло; а
первая управляющая поверхность (712) содержит перемещаемую заднюю кромку (706), выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла с одной стороны и таким образом создания дополнительной подъемной силы и инициирования соответствующего крена.
2. Управляющая поверхность по п. 1, в которой гидрогазодинамический корпус (704) соединен с транспортным средством.
3. Управляющая поверхность по п. 2, в которой транспортным средством является самолет.
4. Управляющая поверхность по п. 1, дополнительно содержащая:
вторую управляющую поверхность (714), соединенную с гидрогазодинамическим корпусом (704); и
второе эластомерное сопрягающее средство (710), соединенное с первой управляющей поверхностью (712) и второй управляющей поверхностью (714) таким образом, что второй стыковой зазор (716), образованный при перемещении первой управляющей поверхности (712) относительно второй управляющей поверхности (714), является заполненным.
5. Управляющая поверхность по п. 1, в которой:
первая управляющая поверхность (712) содержит несущую поверхность, выполненную с возможностью:
согласования с контуром крыла в первом положении управляющей поверхности и
изменения толщины крыла во втором положении управляющей поверхности для изменения подъемной силы, действующей на указанное крыло.
6. Управляющая поверхность по п. 5, в которой несущая поверхность содержит блистерную поверхностную секцию (614), выполненную с возможностью изменения толщины крыла по меньшей мере одним перемещением, выбранным из группы, содержащей: удлинение блистерной поверхностной секции (614) и расширение блистерной поверхностной секции (614).
7. Управляющая поверхность по п. 6, в которой толщина крыла во втором положении управляющей поверхности инициирует крен самолета в полете.
8. Управляющая поверхность по пп. 1-4, в которой:
первая управляющая поверхность (712) содержит концевой обтекатель крыла, соединенный с возможностью поворота на первом эластомерном сопрягающем средстве (702) для управления креном.
9. Способ создания эластомерной управляющей поверхности на основе технологии получения непрерывного обвода, согласно которому:
берут управляющую поверхность (712), соединенную с гидрогазодинамическим корпусом (704), и
соединяют эластомерное сопрягающее средство (702) с управляющей поверхностью (712) и гидрогазодинамическим корпусом (704) таким образом, что стыковой зазор (716), образованный при перемещении управляющей поверхности (712) относительно гидрогазодинамического корпуса (704), является заполненным,
причем гидрогазодинамический корпус (704) содержит крыло, а управляющая поверхность (712) содержит перемещаемую заднюю кромку (706), выполненную с возможностью перемещения в заднем направлении для увеличения площади крыла с одной стороны и таким образом создания дополнительной подъемной силы и инициирования соответствующего крена таким образом, что стыковой зазор, образованный при перемещении перемещаемой задней кромки (706) относительно крыла, является заполненным.
10. Способ по п. 9, согласно которому дополнительно:
берут управляющую поверхность (712), содержащую несущую поверхность.
11. Способ по любому из пп. 9 или 10, согласно которому дополнительно:
согласуют контур крыла в первом положении управляющей поверхности и
изменяют толщину крыла во втором положении управляющей поверхности путем использования блистерной поверхностной секции (614), выполненной с возможностью изменения толщины крыла по меньшей мере одним перемещением, выбранным из группы, содержащей: удлинение блистерной поверхностной секции (614) и расширение блистерной поверхностной секции (614).
12. Способ по п. 11, согласно которому дополнительно изменяют подъемную силу крыла посредством изменения толщины крыла во втором положении управляющей поверхности.
13. Способ по любому из пп. 9, 10 или 12, согласно которому дополнительно соединяют гидрогазодинамический корпус (704) с транспортным средством.
14. Способ по п. 9, согласно которому:
управляющая поверхность (712) содержит концевой обтекатель крыла, выполненный с возможностью поворота на эластомерном сопрягающем средстве (702), для обеспечения управления креном таким образом, что стыковой зазор (716), образованный при перемещении концевого обтекателя крыла относительно крыла, является заполненным.
| US 6209824 B1, 03.04.2001 | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| ЭЛАСТИЧНАЯ ОБОЛОЧКА ДЛЯ ГЕРМЕТИЗАЦИИ ТРУБОПРОВОДОВ | 2009 |
|
RU2397403C1 |
| DE 19630681 A1, 05.02.1998 | |||
| US 6467733 B1, 22.10.2002 | |||
| АДАПТИВНОЕ КРЫЛО | 1990 |
|
SU1762488A1 |

