Изобретение относится к авиации безаэродромного базирования и может быть применено в малой авиации для создания транспортных средств, способных составить достойную альтернативу существующим легким самолетам, вертолетам и легковым автомобилям.
Идея вертикального взлета и посадки сопровождает весь период существования авиации. При этом преследуется цель - создать транспортное средство, совмещающее в себе все достоинства автомобиля, самолета и вертолета, устранив при этом их недостатки. У автомобиля недостатком является потребность в дорогах и сравнительно малая скорость передвижения, у самолета это потребность в аэродромах и невозможность совершить аварийную посадку в любом месте, а у вертолета это невысокая экономичность передвижения и принципиально ограниченная скорость. Хотелось бы иметь транспортное средство, сочетающее в себе высокую скорость и экономичность передвижения, как у самолета с возможностью обходится без аэродромов и дорог, как у вертолета, и при этом обеспечить достаточную для гражданского применения безопасность.
Решение этой задачи до середины двадцатого века сдерживалось отсутствием достаточно легкого двигателя. С появлением газотурбинного двигателя необходимые весовые и энергетические параметры могут быть обеспечены. Созданы действующие СВВП, например HARRIER и ЯК-141 с тягой от ТРД, а также СВВП с пропеллерной тягой от ТВД, взлетающие с хвоста (см. например: masterok.livejornal.com/3435854/.html). Однако все они не пригодны для широкого гражданского применения, т.к. не обеспечивают достаточную безопасность на этапах взлета и посадки. Причина этого состоит в применении, для управления навзлетно-посадочном и переходном режимах, газодинамических рулей, действующих от воздуха, отбираемого от газотурбинного маршевого двигателя, который всегда может отказать.
Предпринимались попытки применения в малой авиации роторно-поршневых двигателей Ванкеля и др., которые достаточно легкие. Однако в них не обеспечивается приемлемый моторесурс.
В последние годы наметились пути создания сверхлегких поршневых двигателей, использующих хорошо зарекомендовавшую себя на практике классическую цилидро-поршневую группу с кривошипно-шатунным механизмом. Из опубликованных сведений по этому направлению работ можно пока сослаться только на патент РФ №2645369, приоритет от 2015 г. В связи с этим ведется разработка возможных вариантов применения сверхлегких ДВС в безаэродромной авиации.
Предметом предлагаемого изобретения является принципиальная схема летательного аппарата, позволяющая решить указанную задачу. В современной авиации нашли применение схемы, решающие лишь отдельные проблемы. Например, крыло отлично, с высокой экономичностью, решает проблему полета в крейсерском режиме, и это используется в самолетах. Несущий винт неплохо решает задачу взлета и посадки. Однако скорость горизонтального полета у несущего винта, если его использовать в режиме косой обдувки, ограничена величиной, составляющей приблизительно четвертую часть от концевой окружной скорости вращения винта. А т.к. концевая скорость по условиям аэродинамики и прочности может лишь приблизиться к скорости звука, то максимальныя скорость полета классического вертолета составляет около 250 км/час. Кроме того, т.к. основной полет вертолета происходит в режиме косой обдувки несущего винта, вертолет, как транспортное средство, не экономичен, что обусловлено работой элементов несущего винта, в среднем, в неоптимальных режимах обтекания, как по углу атаки, так и по скорости (угол атаки лопасти сильно изменяется по окружности, а скорость изменяется в широком диапазоне - и по окружности вращения и по радиусу, так что оптимальное значение имеется лишь в небольшом проценте случаев.
В преобразуемых в полете летательных аппаратах - конвертопланах, не удовлетворительно решается переходный режим полета, т.е. процесс разгона, имеющий место от вертолетного взлета до набора скорости, достаточной для работы крыла. Разгон происходит по горизонтали, а воздушный поток, обтекающий аппарат быстро меняется от вертикального до горизонтального направления. Крыло и винт нужно ориентировать по потоку, отслеживая его угол. При этом можно переориентировать весь аппарат, или только его несущую часть - крыло и винт, не меняя ориентацию фюзеляжа. Но при этом возникают две проблемы. Во-первых, процесс разгона затягивается, т.к. на начальном этапе за разгон отвечает только небольшая горизонтальная компонента тяги винта. Во вторых, разгон происходит вблизи земли, что делает проблематичным обеспечение безопасности в случае отказа двигателя, несущей системы или системы управления. При этом имеется опасное сочетание малой высоты и не достаточно высокой скорости. В третьих, успешной переориентации несущих систем конвертоплана мешает большая инерционность перемещаемых частей аппарата и быстрое изменение характеристик органов управления.
В силу вышеуказанных причин, наиболее предпочтительными для решения поставленной задачи являются аппараты, имеющие схему самолета, причем существенно не трансформируемую в части несущих систем и в части режимов функционирования. Это схемы СВВП, взлетающих с хвоста. Такая схема применима только для маломестных аппаратов. Однако это вполне удовлетворяет потребностям независимого перемещения, как это доказано практикой автомобилизации, где более всего развиваются легковые автомобили.
Наиболее близким к предлагаемому вариантом схемы безаэродромного летательного аппарата является СВВП по пат. РФ №2430859, приоритет от 2008 г. Он содержит фюзеляж с расположенным на нем небольшим крылом, а также содержит хвостовое шасси, обеспечивающее вертикальную ориентацию продольной оси фюзеляжа в режимах взлета и посадки. В хвостовой части фюзеляжа установлен толкающий воздушный винт изменяемого шага в кожухе, а также крестообразный (бомбовый) стабилизатор с рулями, обеспечивающими управление по всем трем каналом - крена, курса и тангажа. Безопасность на всех этапах полета обеспечивается небольшим ориентирующим парашютом, расположенным в носовой части фюзеляжа, а также тем, что хвостовое шасси выполнено в виде длинных телескопических гидроцилиндров, обеспечивающих гашение скорости парашютирования при достаточно широкой опорной базе приземления при ветровом сносе. При этом в крейсерском режиме, гидроцилиндры ориентируются вдоль потока, чем минимизируется их аэродинамическое сопротивление, что необходимо для достижения высоких скоростей полета.
В процессе дальнейшей разработки данной схемы СВВП выявлены следующие ее недостатки:
1. Влияние близости земли на характеристики расположенных в хвосте рулей, что создает большую нестационарную помеху по каналам управления курсом, тангажем и креном на первой секунде взлета и на последних секундах приземления. Это усложняет управление не только в ручном, но и в автоматическом режиме.
2. Повышенное аэродинамическое сопротивление, создаваемое кожухом винта, пилонами крепления кожуха, кронштейнами крепления гидроцилиндров шасси, а также крестообразным стабилизатором самолета, на больших скоростях полета. Причем, даже расположенные вдоль направления полета гидроцилиндры шасси дают большое сопротивление, т.к. вблизи поверхности фюзеляжа направление потока иное.
3. Ограниченные возможности увеличения диаметра винта.
Перечисленные недостатки известной схемы увеличивают потребную мощность двигателя, снижают транспортную экономичность, скорость и дальность полета, усложняют обеспечение безопасности при взлете и посадке.
Целью изобретения является устранение вышеперечисленных недостатков известной схемы СВВП.
Предлагается СВВП, содержащий фюзеляж, а также закрепленные на нем крыло и воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа. Также имеется хвостовое шасси, обеспечивающее вертикальное расположение продольной оси фюзеляжа при взлете и посадке, а также система, служащая для смягчения удара при аварийном приземлении, выполненная в виде длинных шарнирно прикрепленных к фюзеляжу гидроцилиндров, соединенных по концам между собой растяжками. Цель изобретения достигается тем, что указанный воздушный винт расположен в носовой части фюзеляжа и снабжен автоматом перекоса, а указанные гидроцилиндры хвостового шасси помещены в конусообразный хвостовой обтекатель, выполненный с возможностью оперативного складывания и раскладывания в полете.
Указанное выполнение СВВП позволяет увеличить диаметр воздушного винта с соответствующим уменьшением потребной мощности на взлет и посадку. Автомат перекоса, установленный на винте увеличенного диаметра, позволяет осуществлять управление самолетом по тангажу и курсу, освобождая от этой функции хвост самолета. Кроме того, за счет переднего расположения винта, управление креном может быть возложено на элероны крыла, обдуваемого в данном случае винтом. Таким образом, хвост может быть выполнен с заостренным обтекателем, без каких либо рулей и стабилизаторов. Гидроцилиндры хвостового шасси могут быть убраны под хвостовой обтекатель фюзеляжа. Это уменьшает аэродинамическое сопротивление ненесущих элементов самолета, которое, при больших скоростях полета, составляет большую часть полного аэродинамического сопротивления летательного аппарата. Таким образом, обеспечивается повышение аэродинамического совершенства, летательного аппарата, позволяющее увеличить скорость полета и повысить экономичность полета, уменьшается потребная мощность двигателя на вертикальный взлет и посадку, увеличивается полезная грузоподъемность и максимальная дальность полета.
В частном варианте осуществления предлагаемого СВВП хвостовой обтекатель выполнен в виде гибкой конусообразной надувной оболочки. При этом возможность развертывания хвостового обтекателя перед посадкой и свертывания после взлета обеспечивается тем, что гибкая оболочка хвостового обтекателя снабжена расположенными вдоль образующей конуса разрезами и механизмом плотного автоматического их соединения и разъединения.
В частном варианте выполнения указанный механизм плотного соединения и разъединения краев оболочки содержит расположенные на одном из соединяемых краев оболочки зубья, а на другом - соответствующие им впадины. Причем зубья снабжены на сопрягаемых поверхностях сквозными отверстиями с фасками, а оси отверстий, при соединении краев оболочки, совпадают между собой, образуя канал, которому может перемещаться соединительный элемент, выполненный, например, в виде троса с закругленным концом, соединенного с установленной на неподвижном основании барабаном, обеспечивающим возможность вдвигания троса в канал и выдвигания его. При вдвигании троса в канал соединяемые края оболочки соединятся под действием вдвигаемого троса, конец которого самоцентрируется при вдвигании, упираясь в фаски отверстий в зубьях. Таким образом обеспечивается возможность дистанционного соединения и разъединения краев оболочки, т.е. застегивание и расстегивание, как с помощью замка «молния». Однако по сравнению с «молнией», здесь, кроме возможности автоматизации процесса обеспечивается высокая прочность и надежность соединения, по принципу так называемого многоушкового соединения. Также обеспечивается достаточная герметичность соединения за счет двух непрерывных кромок, идущих параллельно вдоль всего соединения. Указанными кромками обеспечивается также ориентация соединяемых оболочек по вращению, что необходимо для получения гладкой наружной поверхности обтекателя без выступов и впадин.
Изобретение поясняется нижеследующим описанием примеров конструктивного выполнения и шестью фигурами.
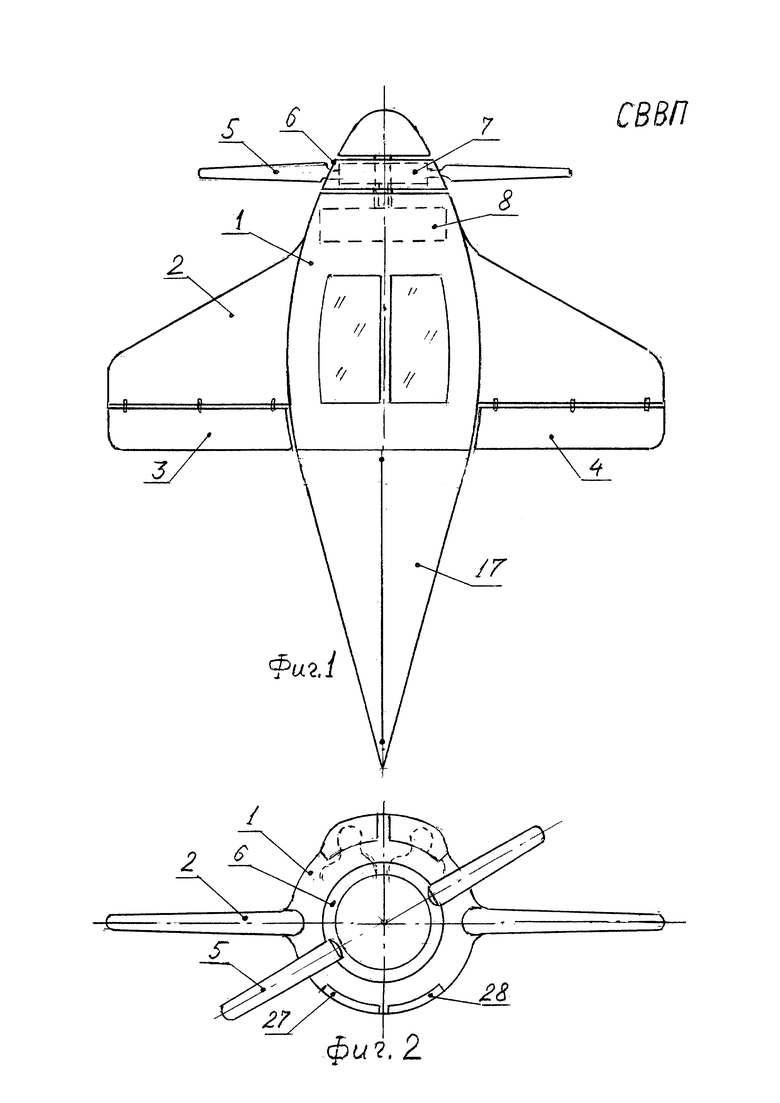
На фиг. 1 изображен предлагаемый СВВП в полетной конфигурации.
На фиг. 2 показан вид с носа в полетной конфигурации.
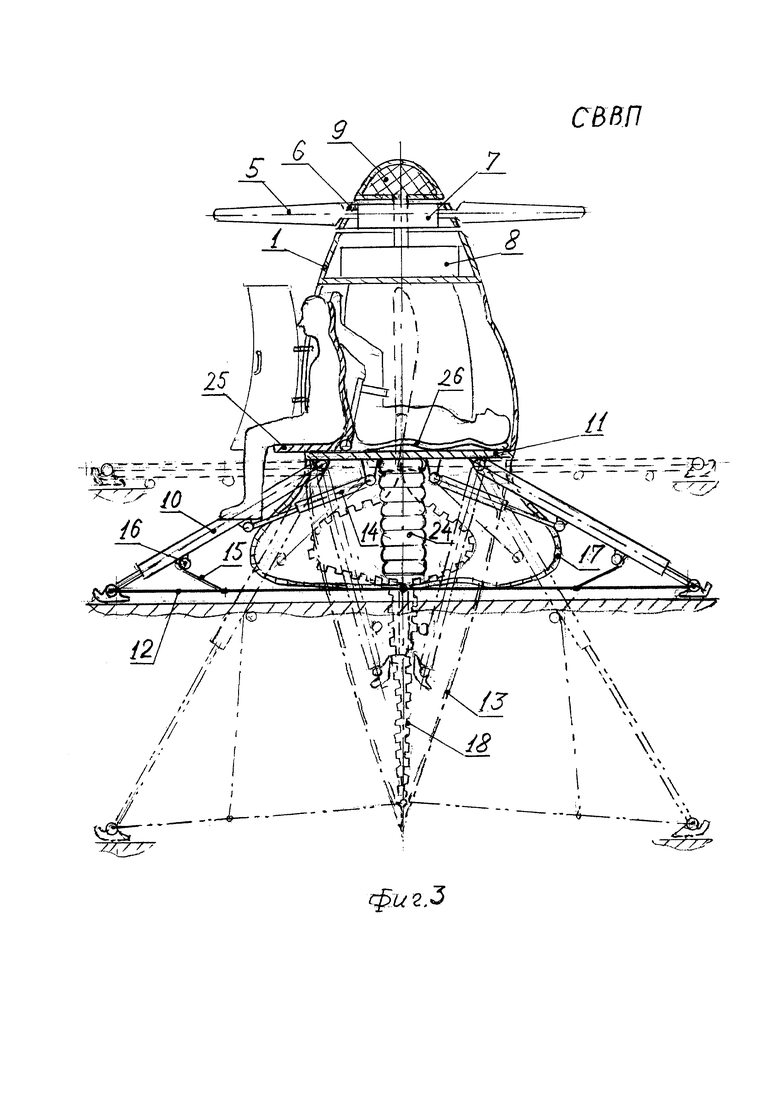
На фиг. 3 изображен предлагаемый СВВП в разрезе в конфигурации, соответствующей стоянке на земле.
Штрихпунктирной линией с одной точкой показано расположение гидроцилиндров шасси внутри хвостового обтекателя.
Штрихпунктирной линией с двумя точками показано положение гидроцилиндров перед посадкой или сразу после взлета.
Штриховой линией показано предельно возможное отклонение гидроцилиндров, достигаемое после аварийной посадки без двигателя.
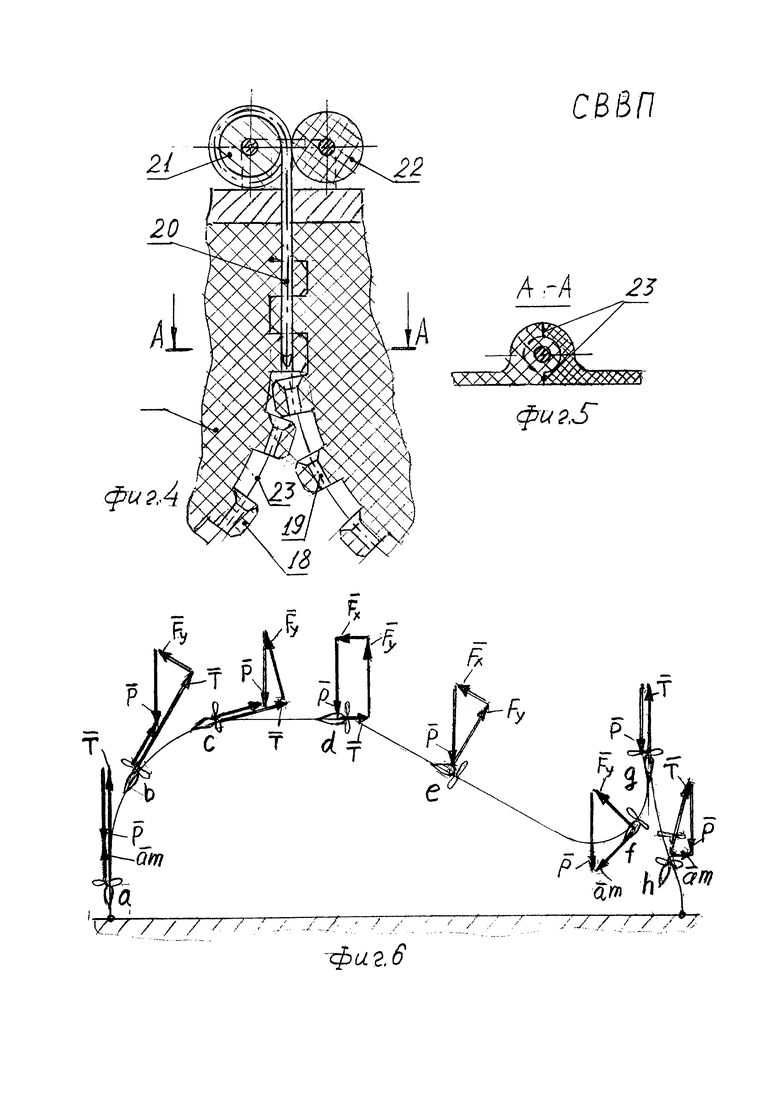
На фиг. 4 показана конструкция механизма соединения и разъединения краев гибкой надувной оболочки хвостового обтекателя.
На фиг. 5 дано сечение плоскостью А-А, показанной на фиг. 4.
На фиг. 6 изображена траектория полного полетного цикла предлагаемого СВВП с векторными диаграммами действующих на аппарат сил в каждой из характерных фаз полета.
Т - сила тяги винта. Fy - подъемная сила крыла. Fx - полная сила аэродинамического сопротивления. Р - сила веса аппарата.
Предлагаемый СВВП содержит фюзеляж 1, имеющий каплеобразную форму с конусообразной заостренной хвостовой частью. Крыло 2 снабжено отклоняемыми поверхностями 3 и 4 с независимым двухканальным управлением, чем обеспечивается возможность одновременного совмещения ими двух функций - функции элеронов и функции закрылков. В носовой части фюзеляжа установлен воздушный винт 5 с расположенным в его втулке 6 автоматом перекоса 7, обеспечивающим возможность управляемого изменения общего шага винта, а также, так называемого, циклического шага винта, как это имеет место у несущего винта вертолета. В принципе, устройство автомата перекоса ничем не отличается от вертолетного. Лопасти винта 5 имеют крутку, оптимизированную для крейсерской скорости полета.
Винт 5 соединен посредством редуктора с двигателем 8. Это может быть или турбовальный двигатель, или поршневой ДВС. Оптимальным является применение звездообразного поршневого ДВС с жидкостным охлаждением с использованием в качестве радиатора элементов наружной обшивки фюзеляжа, чтобы не ухудшать обтекаемость фюзеляжа. Расположенная впереди винта часть обтекателя фюзеляжа жестко соединена с основной частью фюзеляжа и в ней размещается парашют 9 (фиг3), служащий для торможения и ориентации аппарата при отказе двигателя. Парашют 9 не следует делать большим, чтобы не увеличивать угол ветрового сноса аппарата при аварийном приземлении, что чревато опасностью опрокидывания. Скорость аварийного приземления аппарата должна быть не меньше 20 м/сек. Соответствующая площадь парашюта для двухместного СВВП составит 10 м кв.
В хвостовой части СВВП расположено шасси, выполненное в виде длинных гидроцилиндров 10, прикрепленных шарнирно с силовому днищу 11 фюзеляжа (фиг.3). Нижние концы штоков гидроцилиндров соединены между собой силовыми растяжками 12 постоянной длины, располагающихся при стоянке на земле радиально. В полете гидроцилинды 10 убраны под хвостовой обтекатель 13 (см. штрихпунктирную с одной точкой). Для сдвигания и раздвигания гидроцилиндров 10 они снабжены сервоприводами 14. Для обеспечения компактного складывая растяжек 12 к ним прикреплены вспомогательные тросики 15, соединенные с не силовыми неуправляемыми лебедками 16, выполненными, например, с пружинными двигателями. При убирании гидроцилиндров под обтекатель, лебедки 16 подтягивают силовые растяжки 12 вверх, исключая их провисание.
Хвостовой обтекатель фюзеляжа выполнен в виде конусообразной гибкой надувной оболочки 17 (фиг. 1, фиг. 3). Вдоль образующих конуса, напротив расположения соответствующих гидроцилиндров 10, оболочка 17 имеет разрезы вдоль образующих конуса, распространяющиеся от основания конуса и до вершины, где оболочка прикреплена к растяжкам 12 в месте их пересечения между собой (фиг. 3). На краях разрезов имеются зубья 18 (см. фиг. 4), расположение которых соответствует впадинам на ответной части разреза. Зубья 18 на сопрягаемых поверхностях имеют отверстия 19 с фасками. Указанные отверстия при плотном смыкании между собой образуют непрерывный канал, в котором расположен с возможностью перемещения вдоль канала гибкий соединительный элемент 20, выполненный, например, в виде тросика с закругленным концом. Гибкий соединительный элемент 20 намотан на барабан 21 с прижимным роликом 22. И ролик, и барабан снабжены приводом вращения. Зубья 18 выполнены заодно с уплотнительными полосками 23, выполняющими также функцию ориентирования зубьев по вращению относительно оси соединительного элемента 20. Этим обеспечивается возможность выполнить наружную поверхность соединения без выступов и впадин, что необходимо для обтекаемости (см. фиг. 5). Данный механизм соединения и разъединения краев разреза оболочки обеспечивает высокую прочность и надежность соединения, а также возможность дистанционного управления процессом раскрывания и закрывания разрезов оболочки в полете (в отличие от замков типа «молния»).
Под днищем 11, в центре, расположена дополнительная система торможения при аварийной посадке. Она вступает в действие на последнем участке торможения, когда гидроцилиндры разошлись на угол более 30 градусов, при котором их действие становится неэффективным. В варианте, изображенном на фиг. 3, дополнительная система выполнена в виде сильфона 24, снабженного автоматическим клапаном ограничения давления.
Действие предлагаемого СВВП отличается от действия обычного самолета, обладающего коэффициентом тяговооруженности больше единицы, способом создания управляющих и стабилизирующих моментов силы, что обусловлено отсутствием хвостового оперенья или необязательностью его наличия или использования в предлагаемом аппарате. На всех штатных режимах полета аппарат работает в условиях обтекания, близкого к продольному, т.е. с углами атаки крыла, не превышающими критические (менее 14 градусов), и с углами скольжения близкими к нулю. Задача пилотирования состоит в непрерывном поддержании этого условия. Отличие от пилотирования обычного самолета состоит в том, что скорость обтекания самолета в своем изменении по абсолютной величине может уменьшаться до нуля. Обычный самолет при этом сваливается, т.к. в стремлении противостоять силе тяжести летчик вынужден выводить крыло на закритические углы атаки, чтобы избежать ускорения к земле. В предлагаемом же самолете, обладающим запасом тяги до величины веса самолета, он может этого не делать, а просто прибавить тягу, удерживая крыло на рабочих углах атаки. При этом перемещение аппарата в пространстве относительно земли определяется векторной суммой четырех сил: силы гравитации земли, силы тяги винта, направленной вдоль продольной оси самолета, вектора подъемной силы крыла, направленной почти перпендикулярно плоскости крыла, и вектора суммарной силы аэродинамического сопротивления аппарата, направленной вдоль оси фюзеляжа назад. Если тяга винта может по абсолютной величине приближаться к величине силы тяжести, то можно достигнуть равновесия аппарата в воздухе при как угодно малой величине подъемной силы крыла. Достаточно лишь сориентировать аппарат по отношению к земле вертикально. Крыло на закритически малых скоростях полета может использоваться для нужд управления в меру оставшейся несущей способности крыла. Однако практически скорость осевого обтекания крыла в рассматриваемом случае никогда не доходит до нуля, т.к. при уменьшении скорости полета возрастает индуктивная скорость винта, доходящая на режиме висения до 20-30 м/сек. Этого достаточно, чтобы за счет элеронов 3 и 4 крыла компенсировать реактивный момент двигателя, прикладываемый от редуктора винта к фюзеляжу. Так мы получаем равновесие аппарата в режиме неподвижного висения относительно воздуха. Но это равновесие неустойчивое. Небольшое изменение любой из указанных сил приведет к отклонению результирующей силы от нуля, и появится вызванное этой силой ускорение аппарата в соответствующем направлении. Интеграл этой силы по времени покажет накопление скорости, а интеграл скорости покажет накопление смещения. Парировать этот процесс и удержать в допустимых пределах отклонение аппарата по перемещению можно, располагая тремя каналами управления. Если пользоваться самолетными представлениями, то необходимо управлять моментами по тангажу и по курсу, а также управлять величиной тяги винта. У самолета момент по тангажу создается рулем высоты хвостового оперенья, а момент по курсу - килем. Однако при малых скоростях полета, действие рулей на хвостовом оперенье может оказаться недостаточно эффективным. Особенно это относится к случаю близости земли, в частности во время взлета и приземления. Именно вследствие недостаточной эффективности рулей хвостового оперенья и при отсутствии возможности управления вектором тяги силовой установки самолет может при малой скорости полета свалиться и войти в штопор. Большой коэффициент тяговооруженности не всегда помогает избежать этого. В СВВП, взятом за прототип, выручает обдув хвостового оперенья расположенным в хвосте винтом. Однако это плохо работает вблизи земли. В предлагаемом же аппарате управляющие моменты по тангажу и курсу на всех режимах одинаково эффективно создаются автоматом перекоса. Если лопасти винта не имеют шарнирного закрепления, то действие автомата перекоса сводится к параллельному смещению вектора тяги относительно центра. В случае шарнирного закрепления лопастей возникает циклическое маховое отклонение лопасти с соответствующим завалом конуса ометания винта и, как следствие, возникает угловое отклонение действия суммарной центробежной силы лопастей на втулку с появлением плеча этой силы относительно центра инерции аппарата. В обоих случаях возникает момент тангажа или рыскания, который, в сочетании с управлением общим шагом винта, т.е. тягой, можно использовать для полноценного управления аппаратом как на режиме висения, где управление ничем не отличается от вертолетного, так и в самолетном режиме, где тот же автомат перекоса будет действовать не менее эффективно, чем рули хвостового оперенья. Так что, хвостовое оперенье оказывается ненужным и от него, с целью уменьшения аэродинамичекого сопротивления, которое очень критично влияет на экономические показатели полета на больших скоростях, следует отказаться, оставив лишь один идеальный фюзеляж, аэродинамика которого в случае предлагаемого СВВП не испорчена даже шасси, которое полностью убирается под общий обтекатель фюзеляжа.
Некоторое отличие пилотирования в горизонтальном полете от самолетного может состоять в том, что пропеллер увеличенного диаметра создает ощутимые гироскопические силы, вследствие которых момент силы по тангажу вызывает не ускорение по тангажу, а угловую скорость по курсу, и, наоборот, момент рыскания вызывает появление скорости изменения угла тангажа. Т.е. возникает перекрестное взаимовлияние по данным каналам управления. Однако в случае шарнирного закрепления лопастей винта и наличия махового движения лопастей, гироскопические силы, как и на вертолете, воспринимаются воздухом и мало передаются на фюзеляж. Положительное влияние гироскопических сил состоит в стабилизации направлении продольной оси аппарата независящее от аэродинамических сил. Это компенсирует утрату возвращающих сил, имеющих место у аэродинамического стабилизатора при правильной центровке. Причем, даже аппарат с неустойчивостью управления по курсу и тангажу, в настоящее время, при повсеместном применении автопилотов, вполне применим. Однако в случае предлагаемого аппарата мы имеем дело не с неустойчивостью, а лишь с малой величиной аэродинамической составляющей сил стабилизации. Небольшая стабилизирующая сила в частности может иметь место за счет установки элеронов 3 и 4 под небольшим отрицательным углом атаки, как это имеет место у самолетов бесхвостой схемы. Однако в данном аппарате это не обязательно.
Управление по крену, как уже говорилось, осуществляется элеронами 3 и 4. Т.е. оно остается обычным аэродинамическим. Однако вследствие того, что крыло расположено ближе к обдувающему его винту, нежели к земле, а также вследствие большого плеча действия элеронов, эффективность их остается достаточной для всех режимов полета с двигателем.
При отказе двигателя следует немедленно выпустить парашют 9, который погасит остаточную воздушную скорость аппарата до небольшой величины, предотвратит вращение аппарата и сориентирует его продольную ось вертикально.
Рассмотрим последовательно все этапы полетного цикла. Предстартовая конфигурация аппарата изображена на фиг.3. Кресла 25 и 26 установлены на шарнире, что позволяет экипажу удобно садиться на него и сходить на землю. Для взлета оба кресла опрокидывают, а затем закрывают двери 27 и 28. Двигатель запускают при установленном нулевом общем и нулевом циклическом шаге винта 5. Затем включают режим автоматической стабилизации числа оборотов двигателя, а также стабилизации углов крена, курса и тангажа (в системе координат, связанной с самолетом). Далее быстро вводят общий шаг винта до получения тяги, превосходящую вес аппарата (например, в 1,25 раза). При этом аппарат начинает ускоряться вверх с ускорением, равным разности между силой веса и силой тяги (например, 2,5 м/сек за секунду) (позиция «а» на фиг. 6). По мере увеличения скорости вертикального полета летчик вводит в действие крыло, управляя при этом, как обычно, тангажом, но используя вместо хвостового оперенья моменты, создаваемые автоматом перекоса. При этом углы атаки обтекания профиля крыла сохраняют в докритических пределах. Плавно возрастающая скорость полета обуславливает плавное возрастание подъемной силы крыла, и траектория полета будет плавно наклоняться. Она будет стремиться к горизонтали (позиции «b» и «с»). При этом можно плавно уменьшать тягу винта, и, на некоторой скорости, когда подъемная сила крыла станет равна весу, полет станет горизонтальным - самолетным (позиция «d»). Чтобы горизонтальный полет наступил раньше, следует заранее ввести закрылки, которые, в данном варианте выполнения, совмещены с элеронами 3 и 4. Т.е. следует к дифференциальному углу отклонения элеронов добавить постоянную составляющую. Развязка каналов элеронов и закрылков реализуется автопилотом. Человек управляет только задатчиком. При подходе к пункту назначения следует выполнить обратную последовательность изменения наклона траектории полета. Для этого следует плавно уменьшать скорость полета до нуля, не выходя при этом за рабочие углы атаки. При этом углы полета также будут изменяться в обратном направлении, чем при взлете. Т.е. самолет будет кабрировать, набирая высоту (позиция «f»). Отличие от взлетного режима здесь состоит в том, что тягу сначала уменьшают, а затем вводят лишь в пределах веса аппарата. Когда скорость полета уменьшиться до нуля, установится вертолетный режим висения (позиция «g»). Далее сдует произвести снижение в режиме висения. При этом сдует производить корректировку положения аппарата относительно земли для выхода в заданную точку приземления. Производить это следует за счет малых горизонтальных скоростей, не выводящих винт в режимы сильного скоса обдувки (особенно если лопасти не имеют маховых шарниров) (позиция «hʺ). Чтобы уменьшить высоту вертолетного спуска и уменьшить время, затрачиваемое на спуск, и не попасть в режим вихревого кольца, следует минимизировать исходную высоту предпосадочной эволюции, подходя к месту назначения в самолетном режиме со снижением (позиция «е»). Это даст экономию топлива, которое в вертолетном режиме расходуется быстрее. В вертолетном режиме снижения разрезы оболочки хвостового обтекателя фюзеляжа раскрывают и выпускают гидроцилиндры 10 шасси с помощью сервоприводов 14.
Если отказ двигателя, системы управления или несущих элементов, произошел при высоте полета выше 20 метров, выбрасывается парашют 9, который тормозит аппарат относительно воздуха и ориентирует его в посадочное вертикальное положение. Управление местом приземления при этом возможно с помощью парашюта 9, если имеется достаточный запас высоты.
Если отказ техники происходит на высоте менее 20 метров, то в этом случае аппарат уже находится во взлетно-посадочной конфигурации, а парашют не требуется, т.к. скорость падения с этой высоты находится в пределах возможностей безопасного торможения ее с помощью гидроцилиндров 10, рабочий ход торможения которых, вместе с ходом пневмосильфонов 24, составляет 2 м.
Гибкие оболочки хвостового обтекателя могут надуваться с использованием скоростного напора, отбираемого в носовой части фюзеляжа. Этого давления будет достаточно, чтобы избежать появления аэроупругих колебаний оболочки, т.е. флаттера обшивки. Этому способствует армирование оболочки высокомодульным кордом.
Ниже приведены расчетные оценки технических параметров предлагаемого СВВП, достигаемые в вышеописанном примере его выполнения.
Двигатель поршневой звездообразный двухтактный восьми цилиндровый с турбовентиляторной избыточной продувкой и впрыском бензина в цилиндр.
Максимальная мощность двигателя -200 квт.
Рабочий объем - 2,5 л.
Номинальная мощность 110 квт при 60 об/сек.
Удельный расход топлива 0,3 кг/кВт час.
Масса конструкции двигателя 40 кг.
Диаметр блока цилиндров (по снованиям свечей) - 550 мм. (Параметры двигателя получены масштабированием параметров опытного образца несколько меньшей мощности).
Взлетная масса СВВП - 300 кг.
Число мест - 2.
Коэффициент полезной нагрузки 0,5.
Диаметр винта 2 м.
Хорда лопасти для двухлопастного варианта - 0,18 м.
Коэффициент тяговооруженности - 1,25.
Максимальная тяга винта - 3750 ньютон.
Максимальное ускорение вверх на взлете - 2,5 м /сек кв.
Мощность на валу винта в начале вертикального взлета с ускорением 2,5 м/сек кв. при плотности воздуха 1,2 кг /м куб. и КПД винта в режиме висения 60% - 160 квт.
Индуктивная скорость потока в плоскости винта в режиме висения - 25 м/сек.
Минимальная скорость горизонтального полета с закрылками - 40 м/сек=145 км/час.
Время набора скорости горизонтального полета в режиме ускорения по вертикали - 16 сек.
Расход топлива в режиме вертикального взлета - 45 кг/час = 12,5 г/сек.
Затраты топлива на вертикальный взлет без плавного введения в действие крыла - 200 г.
Примерный суммарный расход топлива на взлет и посадку по оптимальной глиссаде (т.е. с кабрированием от минимально возможной высоты) - 0,5 кг.
Скорость аварийного парашютирования - 20 м /сек.
Необходимая площадь ориентирующего парашюта при Сх парашюта 1,25 - 10 м. кв.
Перегрузка при аварийной посадке без двигателя - 10 G.
Размах крыла - 3 м.
Площадь крыла - 1,6 м кв.
Профильный коэффициент сопротивления крыла - Сх кр. - 0,01
Мидельное сечение фюзеляжа - 0,8 м кв.
Сх фюзеляжа - 0, 07.
Принимая плотность воздуха 1,2 и скорость полета 140 м/сек = 500 км/час, получаем:
Индуктивная скорость скоса потока крыла - 0,6 м/сек.
Соответствующая мощность индуктивного сопротивления крыла - 1.8 квт.
Мощность профильного сопротивления крыла на 500 км/час - 27 квт.
Мощность аэродинамического сопротивления фюзеляжа - 94 квт.
Принимая для среднеплана интерференцию крыла с фюзеляжем равной нулю, получаем полную мощность аэродинамического сопротивления полета на скорости 500 км/час и плотности воздуха 1,2 кг/м куб:
1,8+27+94=123 квт.
Если крутку лопастей винта оптимизировать на 500 км/час, то КПД винта может составить 73%.
При этом мощность на валу составит 170 квт.
Соответствующий часовой расход топлива - 50 кг/час.
Удельный расход топлива - 10 кг/ 100 км.
Дальность полета, соответствующая запасу топлива на борту 30 кг, составит 300 км.
Однако если высоту полета увеличить до 7000 м, где плотность воздуха, а следовательно и аэродинамические сопротивления, вдвое меньше, то удельный расход топлива уменьшиться до 5 кг на 100 км, а дальность увеличиться до 600 км.
Если дополнительно к этому уменьшить скорость полета в два раза, т.е. до 250 км/час, то удельный расход топлива уменьшиться в 4 раза - до 1,25 кг на 100 км, а дальность возрастет до 1200 км. В этих оценках мы можем пренебречь возрастанием мощности индуктивного сопротивления крыла, т.к. оно, как приведено выше, очень мало. Кроме того, можно не учитывать и возрастание профильного Сх крыла, т.к. крыло площадью 1,6 м. кв. взято с большим запасом несущей способности (скоростной напор у земли доходит до 12000 Па).
В силу сказанного вполне реально довести высоту полета и до 10000 м, где плотность воздуха в 3 раза меньше, чем на земле. При этом удельный расход топлива то же уменьшится в 3 раза, по сравнению с земным, и составит (на скорости 500 км/час) 3,3 кг на 100 км, а дальность возрастет до 900 км.
Соответственно, при снижении скорости полета до 250 км/час удельный расход топлива на 10 000 метровой высоте уменьшится еще в 4 раза - до 0,83 кг на 100 км, а дальность полета, при 30 кг запасе топлива на борту, увеличится до 3600 км.
Таким образом, как транспортное средство, СВВП не только в состоянии уменьшить затраты на содержание дорог, но может иметь значительное превосходство над автомобилем, как по скорости, так и по экономичности. В отношении же безопасности, самолеты уже сейчас безопаснее автомобиля. Этому способствуют, в частности, более благоприятные возможности к автоматизации воздушного движения по сравнению с наземным.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2021 |
|
RU2805888C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2430859C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ АЭРОДИНАМИЧЕСКАЯ РАСПРЕДЕЛЁННАЯ СИСТЕМА | 2018 |
|
RU2742495C2 |
| БЕЗАЭРОДРОМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2746025C2 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| МАЛОЗАМЕТНЫЙ БЕСПИЛОТНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2693427C1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1992 |
|
RU2028964C1 |
Изобретение относится к области авиации, в частности, к конструкциям летательных аппаратов вертикального взлета и посадки. Самолет вертикального взлета и посадки (СВВП) содержит фюзеляж, крыло и воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа. СВВП также содержит хвостовое шасси, обеспечивающее вертикальное расположение продольной оси фюзеляжа при взлете и посадке, выполненное в виде длинных шарнирно прикрепленных к фюзеляжу гидроцилиндров. Воздушный винт расположен в носовой части фюзеляжа и снабжен автоматом перекоса. Хвостовой обтекатель, лишенный хвостового оперения, выполнен с возможностью дистанционно управляемого складывания и раскладывания в полете, а гидроцилиндры шасси выполнены с возможностью убирания в полете под указанный хвостовой обтекатель. Обеспечивается уменьшение аэродинамического сопротивления самолета, повышение скорости, экономичности и дальности полета. 2 з.п. ф-лы, 6 ил.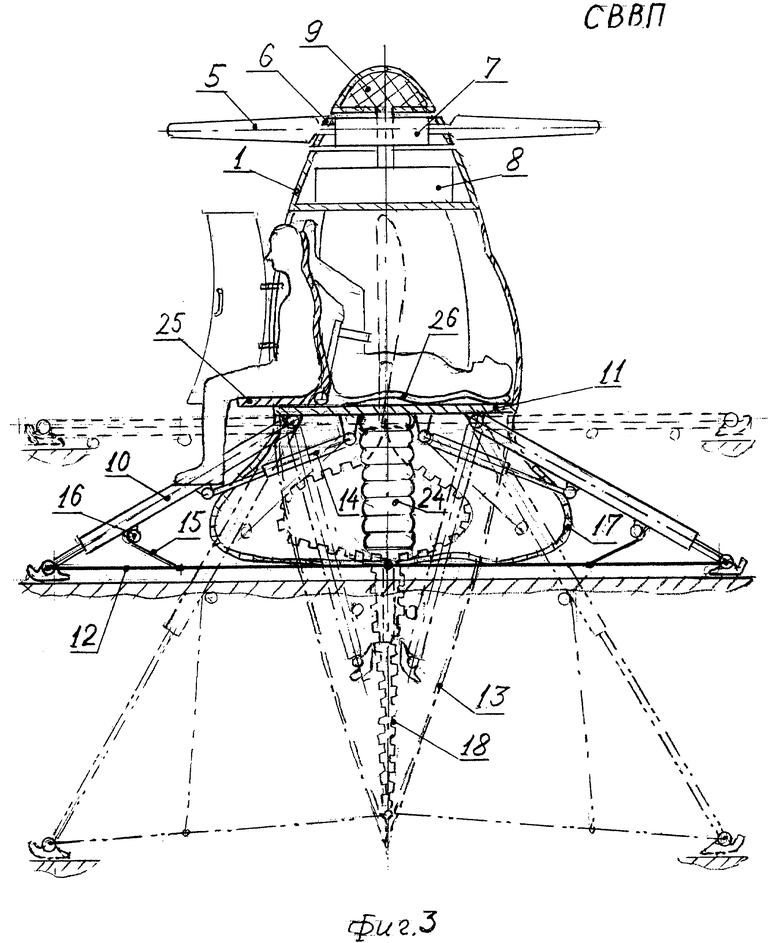
1. Самолет вертикального взлета и посадки (СВВП), содержащий фюзеляж, закрепленные на нем крыло и воздушный винт изменяемого шага, ось которого расположена вдоль продольной оси фюзеляжа, а также содержащий хвостовое шасси, обеспечивающее вертикальное расположение продольной оси фюзеляжа при взлете и посадке, выполненное в виде длинных шарнирно прикрепленных к фюзеляжу гидроцилиндров, соединенных по концам между собой растяжками, отличающийся тем, что указанный воздушный винт расположен в носовой части фюзеляжа и снабжен автоматом перекоса, хвостовой обтекатель фюзеляжа выполнен с возможностью дистанционно управляемого складывания и раскладывания в полете, а гидроцилиндры шасси выполнены с возможностью убирания в полете под указанный хвостовой обтекатель.
2. СВВП по п. 1, отличающийся тем, что указанный хвостовой обтекатель выполнен в виде гибкой надувной оболочки с прорезями вдоль образующих, расположенных напротив соответствующих гидроцилиндров и снабжен механизмом дистанционно управляемого раскрывания и соединения краев прорезей.
3. СВВП по п. 2, отличающийся тем, что указанный механизм раскрывания и соединения краев прорезей гибкой надувной оболочки хвостового обтекателя содержит расположенные на одном из соединяемых краев оболочки зубья, а на другом - соответствующие им впадины, причем зубья снабжены на сопрягаемых поверхностях сквозными отверстиями с фасками, а оси отверстий при соединении краев оболочки совпадают между собой, образуя канал, по которому может перемещаться гибкий соединительный элемент, соединенный с приводным барабаном.
| Прибор для вычерчивания аффинных, аксонометричных и перспективных проекций тела по его ортогональной проекции | 1949 |
|
SU84342A1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2016 |
|
RU2643063C2 |
| KR 101663792 B1, 07.10.2016 | |||
| US 20180050792 A1, 22.02.2018 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2093422C1 |

