Область техники
Настоящее раскрытие относится к способу взаимного соединения штанг для образования части бурильной колонны, а более точно - к способу обнаружения резьбового входа штанги бурильной колонны. Изобретение также относится к устройству для обнаружения такой резьбы и к системе земляного бура, содержащей такое устройство.
Уровень техники
В поисково-разведочном бурении средняя длина бурильной колонны обычно может быть около 900 м. Бурильная колонна, как правило, состоит из множества буровых штанг, которые в зависимости от конфигурации, как правило, весят около 11-20 кг каждая и имеют длину около 2-3 м. Буровые штанги соединяются между собой посредством резьбового соединения.
Кроме того, во многих применениях, а также в зависимости от типа породы, типа инструмента и скорости бурения может быть необходимым заменять сверло или другие части инструмента, например, каждые 300 м бурения. Смена инструментов может быть связана с извлечением всей бурильной колонны из скважины, заменой самой нижней части, а затем повторной вставкой всей бурильной колонны, после чего бурение может продолжаться. На практике и в зависимости от условий породы 10-20 операций извлечения из буровой скважины не являются редкостью.
Излишне говорить, что очень большое количество буровых штанг должны быть обработаны, включая их захват из транспортного носителя, вставку их в бур, скрепление их, разъединение их и возвращение их на транспортный носитель.
В действительности это может означать, что оператор должен переносить/поднимать от 11 до 20 кг штангу около 1200 раз к или от буровой установки для каждого отверстия. По оценкам среднее число отверстий, пробуренных одной установкой, составляет 35 отверстий в год, в результате этого оператор переносит (от 11 до 20)×1200×35/(220 рабочих дней) = 2100 до 3820 кг/день. Это является главной причиной для разработки так называемой системы погрузки-разгрузки штанг (RHS).
Такие системы погрузки-разгрузки штанг раскрыты в публикациях WO 2011/129760 A1 и WO 00/65193 A1. Система погрузки-разгрузки штанг может, как правило, содержать манипулятор, имеющий специальный захват для захвата буровых штанг. Во время операции прямого бурения рука манипулятора выполнена с возможностью подъема буровых штанг с транспортного средства или промежуточного носителя и помещения буровой штанги в буровую установку, после чего буровая штанга соединяется с уже установленной буровой штангой для увеличения бурильной колонны. Во время операции извлечения бурильной колонны рука манипулятора выполнена с возможностью подъема отсоединенных штанг из буровой установки и их возвращения на место на транспортное средство или промежуточный носитель.
Для того чтобы обеспечить полностью автоматическую систему, тем самым еще больше устраняя ручную работу, желательно, чтобы система погрузки-разгрузки штанг имела возможность соединять и отсоединять буровые штанги с/от установленных буровых штанг.
Однако резьбы, используемые во многих применениях, включая керновое бурение со съемным керноприемником, могут иметь очень малую высоту резьбы, и они могут быть слегка коническими.
Если пару таких резьб сводить в осевом направлении вместе наугад, опыт показывает, что с вероятностью около 60% резьбы не зацепляются друг с другом или зацепляются друг с другом неправильно. В любом случае, резьбы могут быть повреждены, что потребует дополнительных затрат и работы.
Публикация WO 02/079603 A1 раскрывает систему для автоматического соединения буровых штанг для образования бурильной колонны. В этой системе маркировочные знаки предусмотрены по периметру штанг таким образом, что их угловые положения могут быть определены, таким образом позволяя штангам быть выровненными вращательно для оптимального входа резьбы.
Существует необходимость в разработке усовершенствованного способа автоматически и надежно находить вход резьбы при использовании системы погрузки-разгрузки штанг для соединения буровых штанг.
Сущность изобретения
Задачей настоящего раскрытия является создание усовершенствованного способа и устройства для обнаружения резьбы и взаимного соединения буровой штанги.
Изобретение ограничивается прилагаемыми независимыми пунктами формулы изобретения. Варианты осуществления представлены в зависимых пунктах формулы изобретения, в нижеследующем описании и на прилагаемых чертежах.
Согласно первому аспекту, предусмотрен способ взаимного соединения буровой штанги с буровой колонной посредством резьбового соединения. Способ содержит выравнивание в осевом направлении буровой штанги с буровой колонной, вращение буровой штанги и бурильной колонны относительно друг друга в направлении вращения разъединения резьбового соединения, идентификацию углового положения буровой штанги, когда концы резьбы буровой штанги и бурильной колонны проскальзывают друг по другу, остановку упомянутого вращения в течение заданного периода определения углового положения и вращение буровой штанги и бурильной колонны относительно друг друга в направлении зацепления так, что буровая штанга взаимно соединяется с бурильной колонной посредством резьбового соединения.
Этап выравнивания следует понимать как обеспечение достаточного выравнивания резьб для того, чтобы быть взаимно соединяемыми между собой. Тем не менее, незначительные радиальные и/или угловые отклонения могут быть допустимы.
"Заданный период" может быть периодом времени, угла поворота и/или осевого смещения. Вращение буровой штанги и бурильной колонны, как правило, является вращением буровой штанги относительно неподвижной бурильной колонны, но вращение бурильной колонны (отдельно или в качестве дополнения) не исключается.
Как правило, бурильная колонна остается, по существу, неподвижной, в то время как буровая штанга вращается.
Испытания показали, что использование данного способа приводит к явному улучшению показателей успешности при соединении буровых штанг, используя автоматизированную систему погрузки-разгрузки штанг (RHS).
Способ может дополнительно содержать смещение в осевом направлении буровой штанги и бурильной колонны в направлении друг к другу. Это смещение может быть в виде смещения буровой штанги по направлению к бурильной колонне. Такое смещение может быть достигнуто с помощью смещающего элемента (например, упругого элемента), приводом или с помощью силы тяжести, например, используя вес самой буровой штанги.
Способ может дополнительно содержать регистрацию осевого смещения штанги во время упомянутого вращения и идентификацию углового положения на основе осевого смещения.
Идентификация направленного сдвига осевого перемещения оказалась точным способом идентификации углового положения.
Определение углового положения буровой штанги может содержать обнаружение сдвига от движения буровой штанги от бурильной колонны к движению буровой штанги по направлению к бурильной колонне.
Способ может дополнительно содержать обнаружение увеличения и/или уменьшения в соотношении между осевым и вращательным движением.
Этап идентификации углового положения буровой штанги может дополнительно содержать последующее обнаружение второго сдвига от движения штанги к бурильной колонне к движению буровой штанги от бурильной колонны.
В качестве альтернативы или в дополнение этап идентификации углового положения буровой штанги может содержать определение осевого ускорения.
В качестве альтернативы или в дополнение этап идентификации углового положения штанги может содержать обнаружение падения давления жидкости, используемой для смещения и/или подачи буровой штанги, и/или бурильной колонны в направлении друг к другу.
Согласно второму аспекту, предусмотрена система погрузки-разгрузки штанги, приспособленная для подачи буровой штанги, которая должна быть соединена с бурильной колонной. Система содержит подвижную руку, имеющую средство захвата, приспособленное для захвата буровой штанги, средство для вращения буровой штанги и бурильной колонны относительно друг друга вокруг продольной оси и в направлении разъединения резьбового соединения и средство для обнаружения углового положения буровой штанги, когда концы резьбы буровой штанги и бурильной колонны проскальзывают друг над другом.
Система может дополнительно содержать средство для смещения буровой штанги и бурильной колонны в направлении друг к другу.
Захватывающее средство может содержать, по меньшей мере, один способный поворачиваться элемент, имеющий периметр, который приспособлен для фрикционного зацепления наружной стенки буровой штанги.
Способный поворачиваться элемент может быть в осевом направлении скользящим в направлении, по существу параллельном продольной оси.
Система может дополнительно содержать устройство привода, предназначенное для осуществления поворота способного поворачиваться элемента.
Способный поворачиваться элемент может быть смещен в направлении, по существу, к бурильной колонне.
Система может дополнительно содержать захват, который переносит способный поворачиваться элемент таким образом, что способный поворачиваться элемент является скользящим по отношению к захвату, при этом захват является передвижным в направлении, по существу, параллельно продольной оси.
Вышеуказанное средство для обнаружения углового положения может быть выполнено с возможностью регистрации продольного положения или изменения в положении буровой штанги вдоль продольной оси и определения упомянутого углового положения буровой штанги на основе упомянутого продольного положения или изменения положения.
Согласно третьему аспекту, предусмотрен узел буровой установки, содержащий устройство подачи, бурильное устройство, которое может перемещаться вдоль устройства подачи и от бурильной колонны, а также систему погрузки-разгрузки штанги, как описано выше, при этом система погрузки-разгрузки штанги выполнена с возможностью подъема и/или опускания буровых штанг с/на носитель и перемещения буровых штанг в/из устройства подачи. Таким носителем может быть, как не ограничивающий пример, устройство хранения, устройство подачи штанги или кассета буровых штанг.
Краткое описание чертежей
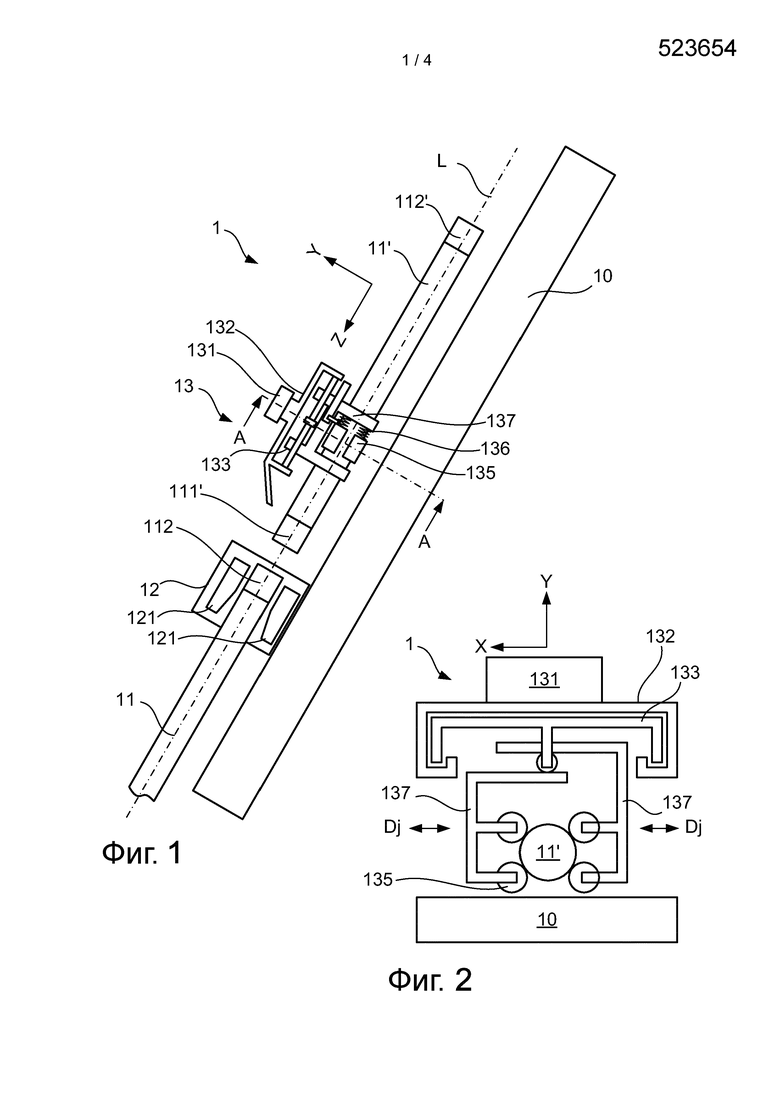
Фиг. 1 представляет собой схематичный вид сбоку буровой установки, снабженной системой погрузки-разгрузки штанги.
Фиг. 2 представляет собой схематичный вид в разрезе буровой установки по фиг. 1.
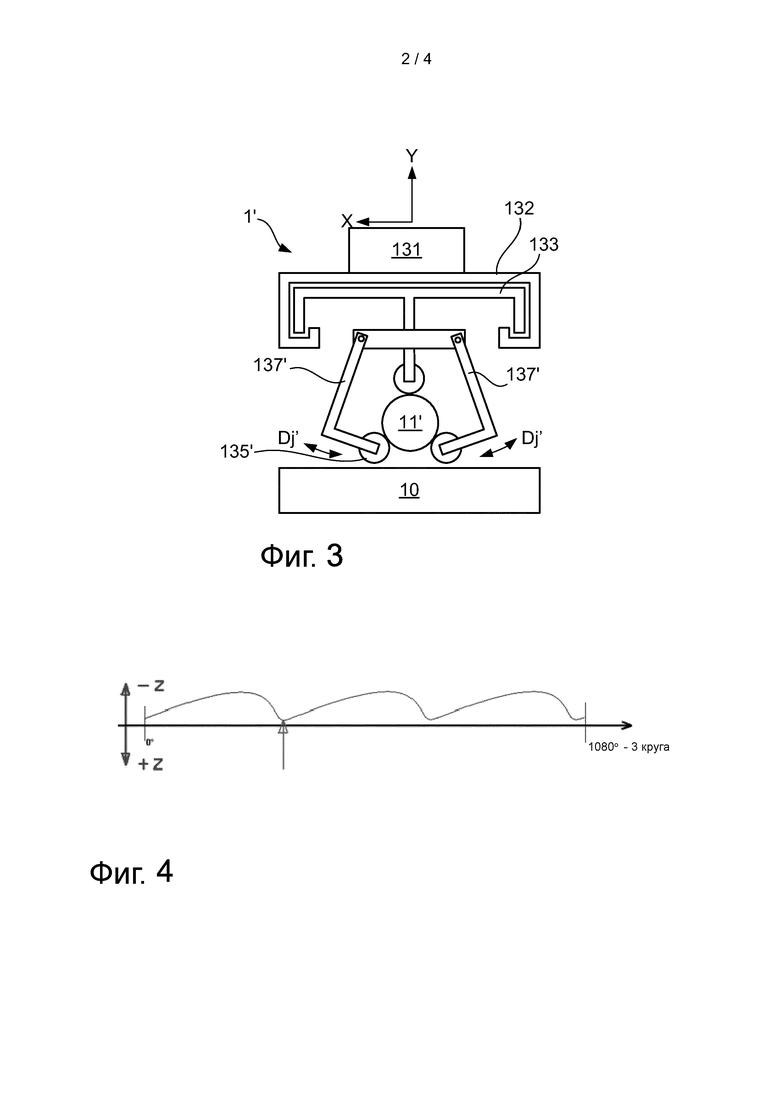
Фиг. 3 представляет собой схематичный вид в разрезе альтернативной конструкции установки погрузки-разгрузки штанги.
Фиг. 4 представляет собой диаграмму, показывающую осевое положение буровой штанги в зависимости от углового положения.
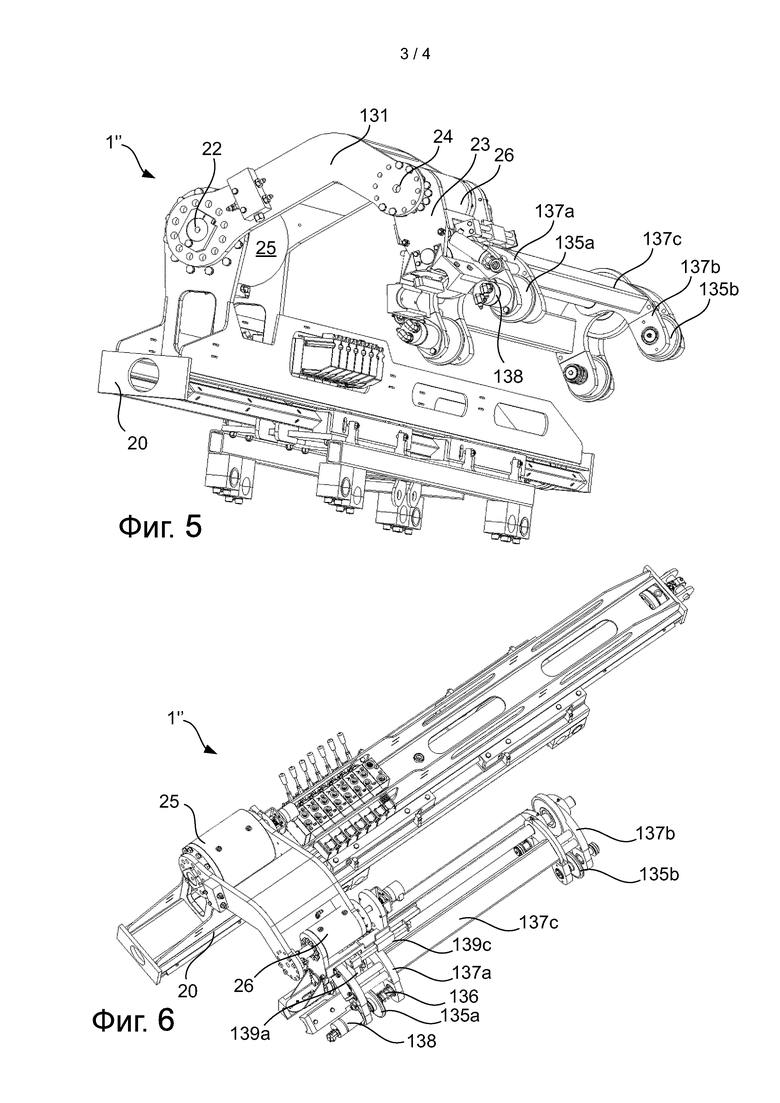
Фиг. 5 представляет собой схематичный вид в перспективе устройства погрузки-разгрузки штанги.
Фиг. 6 представляет собой схематичный вид в перспективе устройства погрузки-разгрузки штанги по фиг. 5.
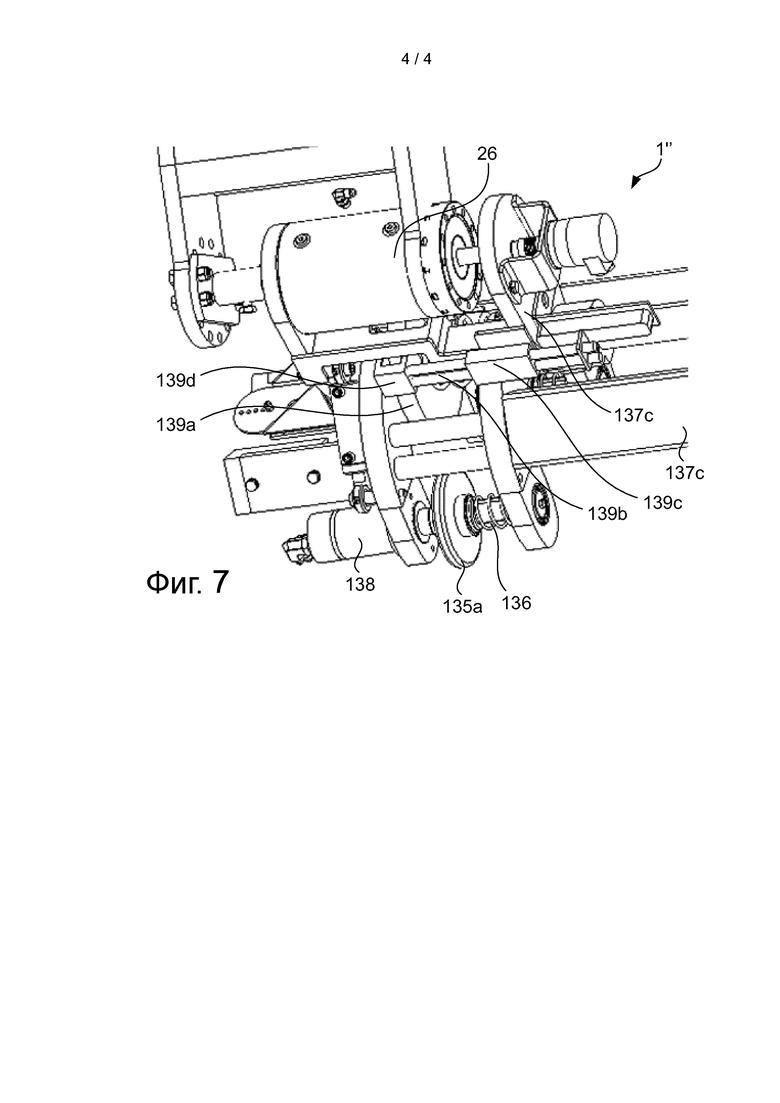
Фиг. 7 представляет собой увеличенный фрагмент части устройства погрузки-разгрузки штанги по фиг. 5 и 6.
Описание вариантов осуществления
Фиг. 1 схематично иллюстрирует буровую установку 1, содержащую раму 10, которая может быть расположена с тем, чтобы указывать ее продольное направление, по существу, в направлении бурения и вращения по часовой стрелке. Рама 10 может нести устройство подачи (не показано), которое может включать в себя пару шестерен, поверх которых бежит цепь. Устройство подачи выполнено с возможностью позволить перемещению бурильной установки 12 вдоль рамы 10, например, как известно из публикации WO 96/30627. Бурильная установка 12 может содержать двигатель вращения, возможно, коробку передач и патрон, содержащий захваты 121 патрона, которые могут быть радиально подвижными известным способом. Буровая установка может иметь сквозное отверстие, которое позволяет компонентам 11, 11', образующим бурильную колонну, проходить через него. Компонентами могут быть буровые штанги 11, 11'.
Такие буровые штанги могут включать в себя или состоять из наконечника, несущего сверла, блока перфоратора, блока амортизатора и/или множества промежуточных буровых штанг. Каждая буровая штанга 11, 11' может содержать удлиненный, по существу цилиндрический корпус, который может быть трубчатым (и, таким образом, полым), соответствующую наружную резьбу 111' на одном ее конце и соответствующую внутреннюю резьбу 112, 112' на другом ее конце.
В типичных применениях буровые штанги могут иметь наружный диаметр в области 40-200 мм и наиболее часто в области 40-120 мм. Участки резьбы могут быть коническими с углом около 0,5°-1,5°, наиболее часто около 1°. Глубина резьбы может быть в области 0,5-2 мм, чаще всего 0,5-1,5 мм. Шаг резьбы может быть в области 2-5 нитей/дюйм. На фиг. 1-3 направления определены следующим образом: Z направление является направлением бурения. +Z, таким образом, иллюстрирует бурение вперед и -Z иллюстрирует обратное бурение (извлечение бурильной колонны). Y является перпендикуляром к направлению Z, а Y и Z образуют плоскость, в которой расположена центральная ось L бурильной колонны. Х является перпендикуляром к обоим: Y и Z.
Основная операция буровой установки известна сама по себе, например, из публикаций WO 96/30627 и WO 2011/129760 A1.
Фиг. 1 и 2 дополнительно иллюстрируют погрузочно-разгрузочное устройство 13 штанги, содержащее руку 131, захватную опору 132, захватную раму 133, захватное зажимное приспособление 137, захватные ролики 135 и смещающие пружины 136.
Рука 131 погрузочно-разгрузочного устройства 13 штанги может быть подвижной между первым положением (не показано), в котором погрузочно-разгрузочное устройство 13 штанги способно поднять буровую штангу от носителя штанги (не показан), и вторым положением (фиг. 1), в котором оно способно позиционировать буровую штангу в буровой установке (как показано на фиг. 1).
Захватная рама 133 может быть подвижной по отношению к захватной руке 131 в направлении, по существу, параллельном направлению бурения Z. Это может быть достигнуто расположением захватной рамы 133 в захватной опоре 132 и обеспечением привода (не показан) для управления относительным движением между захватной рамой 133 и захватной опорой 132. Можно использовать любой тип привода, обеспечивающий, по существу, линейное движение.
Для того чтобы позволить захватить (или опустить) буровую штангу 11', зажимное приспособление 137 погрузочно-разгрузочного устройства 13 штанги может быть подвижным относительно захватной рамы в направлении, DJ, параллельном направлению X, как представлено на фиг. 2. Это может быть достигнуто путем обеспечения привода, обеспечивающего, по существу, прямолинейное движение в направлении Dj.
Захватные ролики 135 могут быть скользяще подвижными относительно захватного зажимного приспособления 137, по существу, параллельно направлению Z бурения. Например, каждый захватный ролик может быть расположен на валу, продолжающемся в или параллельно направлению Z. Устройство 136 смещения может быть предусмотрено для смещения захватного ролика 135 вперед в направлении + Z бурения. Устройством 136 смещения может быть винтовая пружина, газовая пружина или любой другой тип упругого элемента. Ролики 135 могут быть скользяще подвижными под действием устройства смещения на расстояние, соответствующее, по меньшей мере, приблизительно 1-2 шагам резьбы резьбовой системы 112, 112', 111', используемой для соединения буровых штанг.
В показанном варианте осуществления имеются четыре комплекта захватных роликов 135. Каждый комплект может содержать множество роликов, которые выровнены вдоль оси, параллельной направлению Z бурения. Множество захватывающих роликов могут быть выполнены с возможностью образования прямоугольного сечения одним комплектом захватывающих роликов на каждом углу и с центральной осью бурильной колонны, совпадающей с пересечением диагоналей прямоугольника.
Один или несколько захватывающих роликов 135 также могут быть приводными с возможностью вращения вокруг своего соответствующего вала. Таким образом, привод роликов может быть соединен с, по меньшей мере, одним из захватывающих роликов, в качестве альтернативы - со всем комплектом захватывающих роликов, с более чем одним комплектом захватывающих роликов или всеми комплектами захватывающих роликов. Те захватывающие ролики, которые (если таковые имеются) не связаны с приводом роликов, могут свободно вращаться вокруг своей соответствующей оси.
Фиг. 3 иллюстрирует альтернативный вариант осуществления захвата, в котором есть только три комплекта захватывающих роликов 135', выполненных с возможностью образования треугольного сечения с одним комплектом роликов на каждом углу. В этом случае захватное зажимное приспособление 137' может быть поворотным в соответствующем направлении Dj'.
Работа погрузочно-разгрузочного устройства 13 штанги будет теперь описана со ссылкой на фиг. 1, 2 и 4.
Следует отметить, что вариант осуществления, раскрытый на фиг. 3, будет действовать, по существу, таким же образом.
Для того чтобы соединить новую буровую штангу 11' с уже установленной буровой штангой 11 (или бурильной колонной, образованной из множества установленных буровых штанг), рука 131 выполнена с возможностью передвижения захвата достаточно близко к носителю буровой штанги так, что буровая штанга может быть поднята с носителя и удерживаться захватным зажимным приспособлением 137 так, что захватывающие ролики 135 соприкасаются с наружной поверхностью буровой штанги 11'.
Рука 131 затем перемещает буровую штангу 11' по направлению к буровой установке в положение, где наружная резьба 111' новой буровой штанги 11' находится на одной линии с внутренней резьбой 112 на уже установленной буровой штанге 11. В этом положении продольные центральные оси L установленной буровой штанги 11 и новой буровой штанги 11' могут быть, по существу, выровнены друг с другом. Незначительные отклонения могут быть приемлемыми. В этом положении участки резьбы могут быть на расстоянии порядка 100-300 мм друг от друга.
Захватная рама 133 затем приводится в движение по отношению к захватной опоре 132 так, что захватная рама 133 перемещается в направлении +Z, тем самым заставляя новую буровую штангу 11' перемещаться в направлении +Z к установленной буровой штанге 11. Захватная рама 133 может быть перемещена в такой степени, что концевой участок новой буровой штанги 11' с наружной резьбой 111' входит в контакт с концевым участком установленной буровой штанги 11 с внутренней резьбой 112 и заставляет захватывающие ролики 135 быть смещенными в направлении -Z по отношению к захватной раме 133. Посредством этого перемещения смещающее устройство 136 может активироваться (например, сжиматься) с тем, чтобы обеспечить смещающее усилие между участками резьбы 112, 111'. Это смещающее перемещение может быть измерено с тем, чтобы обеспечить адекватное смещающее усилие.
В то время как участки резьбы 112, 111' смещены по отношению друг к другу, захватывающие ролики 135 могут быть приведены во вращение с тем, чтобы заставить новую буровую штангу 11' (но не установленную буровую штангу 11) вращаться вокруг своей продольной оси в обратном направлении, то есть направлении, в котором новая штанга 11' будет поворачиваться при отсоединении ее от установленной штанги 11 (как правило, против часовой стрелки).
Во время этого обратного вращательного движения новая штанга 11' будет двигаться вдоль ее продольного направления, обусловленного кулачковым эффектом примыкающих концов резьбы.
Измерительное устройство может быть предусмотрено для измерения передвижения новой буровой штанги 11' во время вращения. Такое устройство может обнаружить продольное относительное перемещение точки на новой буровой штанге 11' или на части, соединенной с новой буровой штангой 11'; точки ролика 135, или на части, соединенной с роликом 135; или точки на захватной раме 133 или на части, соединенной с захватной рамой 133.
Фиг. 4 иллюстрирует данные, полученные путем измерения продольного перемещения новой штанги 11' в зависимости от углового положения в течение трех полных кругов. График представляет максимумы в точках, где крайние части выступов резьбы контактируют друг с другом, и минимумы в точках, где резьбы проскальзывают друг над другом и тем самым заставляют новую штангу 11' перемещаться вперед. Таким образом, из графика можно определить относительное положение между резьбами, где они имеют хорошую вероятность зацепления должным образом. На практике новая штанга 11' может поворачиваться в обратном направлении, и вращение остановлено в точке (или заранее определенном промежутке времени) только после того, как минимум был определен, то есть где было обнаружено изменение направления движения от +Z, к -Z. Если такая точка не определена в течение 1-3 кругов, обнаружение резьбы может быть прервано и запущен сигнал тревоги с тем, чтобы оператор мог взять под свой контроль управление.
После того как вход резьбы был идентифицирован, новая буровая штанга 11' может быть приведена во вращение в прямом направлении (по часовой стрелке) с тем, чтобы позволить резьбам 112, 111' зацепляться. Это вращение вперед может продолжаться в течение заранее определенного времени вращения на заранее определенную установленную длину или до тех пор, пока предопределенное усилие или момент не будут достигнуты (например, вызывая приводные ролики к проскальзыванию).
Можно позволить захватывающим роликам 135 перемещаться под действием смещающего устройства до такой степени, чтобы соответствовать, по меньшей мере, всей длине участка резьбы 112, 111'. Таким образом, продольное перемещение новой штанги 11' при вращении ее вперед до плотного зацепления с установленной штангой 11 будет компенсироваться за счет продольного перемещения захватывающих роликов. В качестве альтернативы или в дополнение захватная рама 133 может быть приведена в движение или просто освобождена и свободно перемещаться по отношению к захватной опоре 132 с тем, чтобы обеспечить такую компенсацию.
Фиг. 5-7 раскрывают вариант осуществления погрузочно-разгрузочного устройства 1'' штанги, которое может быть использовано для реализации настоящего изобретения.
Погрузочно-разгрузочное устройство 1'' штанги может включать в себя основную раму 20 погрузочно-разгрузочного устройства, которая может быть интегрирована с рамой буровой установки или которая может образовывать отдельную раму, которая может быть установлена или подогнана к раме буровой установки. В качестве другой альтернативы погрузочно-разгрузочное устройство штанги может образовывать отдельный блок, который может быть расположен в непосредственной близости от буровой установки.
Погрузочно-разгрузочное устройство 1'' штанги может дополнительно включать в себя руку 131, которая присоединена к основанию посредством первого сочленения 22 и к свободной рабочей части 23 с помощью второго сочленения 24. Гидравлические, пневматические или электрические приводы 25, 26 могут быть предусмотрены для приведения в движение сочленений 22, 24.
Рабочая часть 23 может включать в себя части, раскрытые выше со ссылкой к фиг. 1-3. Например, комплект разнесенных в продольном направлении захватных зажимных приспособлений 137а, 137b может быть предусмотрен соединенным распорной втулкой 137с для зажимных приспособлений таким образом, что захватывающие ролики 135a, 135b являются разнесенными друг от друга вдоль буровой штанги в продольном направлении так, чтобы уменьшить крутящий момент на захватывающие ролики 135а, 135b.
Показанный вариант осуществления содержит три комплекта захватывающих роликов 135а, 135b, причем каждый комплект содержит два разнесенных в продольном направлении захватывающих ролика 135а, 135b. Каждый комплект захватывающих роликов может содержать один приводной ролик 135а и один свободно вращающийся поддерживающий ролик 135b.
В раскрытом варианте осуществления каждый ролик 135а, 135b расположен на собственном валу и механически не соединен с любым другим из роликов.
Смещающее устройство 136 предусмотрено в виде спиральных пружин, выполненных с возможностью действовать на соответствующий приводной ролик 135а.
Роликовые приводы 138 предусмотрены для приведения в действие соответствующих роликов.
Ролики 135, 135а, 135b могут иметь одинаковые или различные поверхностные свойства на опорную поверхность буровой штанги. В одном варианте осуществления ролики снабжены резиновым или подобным резине материалом с целью повышения их коэффициента трения по отношению к буровой штанге. Альтернативно или в дополнение опорная поверхность может быть с рисунком для обеспечения повышенного коэффициента трения.
Ролики могут быть сконструированы с закругленными краями между их соответствующими радиально и аксиально лицевыми поверхностями таким образом, что относительное перемещение между роликами и буровой штангой является облегченным. Такие закругленные края могут иметь радиус закругления в плоскости Y-Z, по меньшей мере, 0,5 мм, 1 мм, 2 мм или 5 мм.
В вариантах осуществления, где все ролики имеют опорную поверхность, обеспечивающую достаточное трение, может быть предпочтительным разработать все ролики так, чтобы они были передвижными в направлениях Z и подвержены смещению в направлении +Z.
В альтернативном варианте осуществления поддерживающие ролики 135b могут иметь более низкое поверхностное трение, чем приводные ролики 135а, в этом случае они могут быть не обязательными, хотя возможно сделать поддерживающие ролики 135b перемещаемыми в направлении Z.
Один или несколько роликов 135 могут в качестве дополнения или вместо того, чтобы быть приводными, быть выделены в качестве измерительного ролика 139а. Такой измерительный ролик 139а может быть сконструирован подвижным с буровой штангой 11' и обеспечивать настолько малое сопротивление, насколько это возможно. Измерительный ролик 139a может быть соединен следящим роликом 139d к измерительному датчику 139с жесткой штангой 139b, так, что осевое перемещение буровой штанги 11' приводит к соответствующему осевому перемещению измерительного ролика 139а. Измерительный датчик 139с может быть неподвижно соединен с зажимным приспособлением рамы 133. Движение может быть зарегистрировано измерительным датчиком через измерительную штангу 139b, которая может быть в осевом направлении зафиксирована относительно одного измерительного ролика 139а и измерительного датчика 139с и подвижна относительно другого измерительного ролика 139а и измерительного датчика 139c. Это измерительное устройство 139а, 139b, 139с, 139d может быть также использовано для измерения длины смещения при применении смещающего усилия и/или во время вращения вперед для зацепления резьбы.
Следует отметить, что альтернативные способы регистрации осевого перемещения измерительного ролика и/или буровой штанги 11' могут быть применены. Такие альтернативные способы включают в себя оптические методы (например, лазерной дальнометрии и способы на основании камеры).
Кроме того, возможно использовать гидравлические или пневматические средства для смещения роликов в направлении +Z. В таком случае изменение давления в рабочей среде под давлением (газа или жидкости) может быть использовано как показатель осевого перемещения.
Другим вариантом является расположение устройства смещения для действия между захватной рамой 133 и захватной опорой 132, в этом случае можно обойтись без смещающих устройств на роликах. Таким образом, захватная рама может быть смещена в прямом направлении +Z.
Еще одним вариантом является использование акселерометра для измерения ускорения новой буровой штанги 11', достигаемого, когда концы резьбы скользят друг над другом, и использовать это ускорение как указание об угловом положении.
Другой вариант заключается в использовании звукового датчика, который регистрирует звук, производимый, когда концы резьбы проскальзывают друг с другом и резьбы ударяют друг друга в конце движения вперед +Z.
В качестве альтернативного способа для обнаружения входа резьбы новая буровая штанга 11' может быть выровнена с бурильной колонной 11, после чего немедленно осуществляется попытка для зацепления резьбовых участков путем поворота в направлении зацепления. В этой попытке зацепления усилие или крутящий момент, необходимый для достижения зацепления, может быть измерен, например, измерением тока, потребляемого приводом, используемым для обеспечения вращательного движения, или путем измерения фактического продольного перемещения и сравнения его с ожидаемым продольным перемещением, посредством чего отклонение может означать, что приводные ролики являются скользящими по отношению к поверхности новой штанги 11'. Таким образом, отказ (заедание) с резьбовым соединением может быть обнаружен. При обнаружении такого отказа может быть выполнено обратное вращение. Когда резьбовое соединение освобождено, может быть значительное уменьшение усилия или крутящего момента, или, если есть смещение в обратном направлении -Z, резкое осевое перемещение в направлении -Z может быть обнаружено.
Когда такое освобождение обнаружено, это может быть использовано как указание углового положения концов резьбы аналогично тому, как было описано в отношении предыдущего множества вариантов осуществления, и, таким образом, в качестве указания, когда перезапустить вращение вперед +Z.
В то время как вышеприведенные варианты осуществления используют в осевом направлении подвижные и смещаемые ролики, можно обеспечить смещение резьбовых участков другими способами. Например, ролики могут иметь наклоняемые оси вращения, которые могут быть наклонены по отношению к продольному направлению буровой штанги таким образом, что вращение роликов может привести как к обратному вращению, так и к осевому перемещению буровой штанги в направлении +Z.
Следует также отметить, что погрузочно-разгрузочное устройство штанги может быть снабжено с конкретным применением рукой, как описано в данном документе, или основываться на общем промышленном роботе, имеющем модифицированный свободный конец.
Следует отметить, что приводы и датчики, описанные выше, могут быть соединены с системой управления, адаптированной для приема входных сигналов от датчика, обработки входных сигналов от датчика и обеспечения управляющими сигналами для исполнительных механизмов. Такие системы управления считаются известными как таковые и не требуют дальнейшего описания.
В дополнение к разведочному бурению данное изобретение может быть полезно также в связи с любым другим подобным типом вращательного бурения, например бурения взрывных скважин.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ ШТАНГАМИ БУРОВОЙ УСТАНОВКИ | 2014 |
|
RU2636334C2 |
| ЗАХВАТЫВАЮЩЕЕ БУРИЛЬНУЮ ШТАНГУ УСТРОЙСТВО | 2014 |
|
RU2660697C2 |
| СПОСОБ РАЗЪЕДИНЕНИЯ БУРИЛЬНОЙ КОЛОННЫ В БУРОВОЙ УСТАНОВКЕ | 2014 |
|
RU2640620C2 |
| ТРУБЧАТАЯ БУРОВАЯ ШТАНГА, А ТАКЖЕ СИСТЕМА И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДА | 2017 |
|
RU2719885C1 |
| Буровая установка | 1984 |
|
SU1393900A1 |
| БУРОВАЯ ШТАНГА, БУРОВОЕ ДОЛОТО И БУРИЛЬНЫЙ ИНСТРУМЕНТ | 2006 |
|
RU2382867C2 |
| СОЕДИНЕНИЕ ШТАНГ БУРОВОГО СТАВА | 2009 |
|
RU2403369C1 |
| Соединение буровых штанг | 2001 |
|
RU2224082C2 |
| Соединение буровых штанг | 1989 |
|
SU1731932A1 |
| Вращатель буровой установки | 1983 |
|
SU1229295A1 |
Группа изобретений относится к способу взаимного соединения буровой штанги с бурильной колонной посредством резьбового соединения, к системе погрузки-разгрузки штанги и к адаптированному узлу буровой установки, содержащему указанную систему. Технический результат заключается в автоматическом и надежном нахождении входа резьбы при соединении буровых штанг. В способе соединения буровой штанги с бурильной колонной выравнивают в осевом направлении буровую штангу с бурильной колонной, осуществляют вращение буровой штанги и бурильной колонны по отношению друг к другу в направлении вращения разъединения резьбового соединения, определяют угловое положение буровой штанги, когда концы резьбы штанги и бурильной колонны скользят друг по другу, останавливают упомянутое вращение в течение заданного периода определения углового положения и осуществляют вращение буровой штанги и бурильной колонны относительно друг друга в направлении зацепления для соединения резьбовым соединением. Система погрузки-разгрузки штанги содержит подвижную руку со средством захвата, средство для вращения буровой штанги и бурильной колонны по отношению друг к другу вокруг их продольной оси в направлении разъединения резьбового соединения и средство для обнаружения углового положения буровой штанги, при котором концы резьбы буровой штанги и буровой колонны скользят друг по другу. 3 н. и 14 з.п. ф-лы, 7 ил.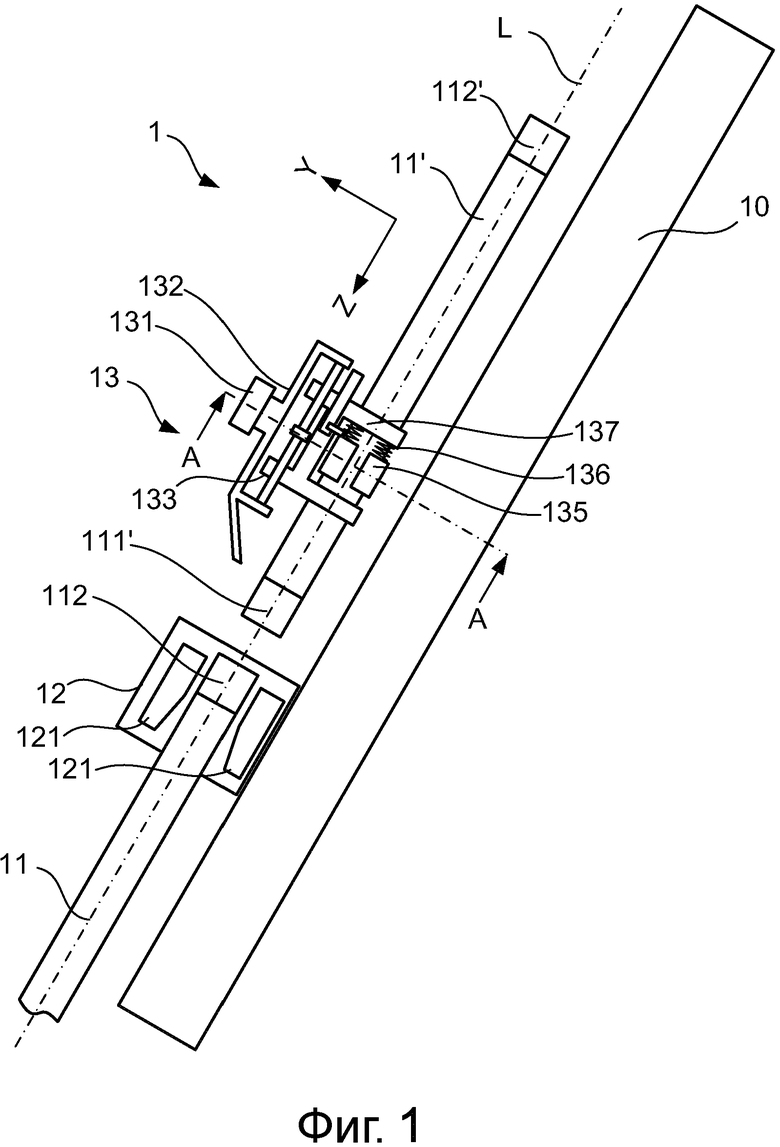
1. Способ взаимного соединения буровой штанги (11') с бурильной колонной (11) посредством резьбового соединения (112, 111'), в котором:
выравнивают в осевом направлении буровую штангу (11') с бурильной колонной (11);
осуществляют вращение буровой штанги (11') и бурильной колонны (11) по отношению друг к другу в направлении вращения разъединения резьбового соединения (112, 111');
определяют угловое положение буровой штанги (11'), когда концы резьбы штанги и бурильной колонны (11) скользят друг по другу;
останавливают упомянутое вращение в течение заданного периода определения углового положения и
осуществляют вращение буровой штанги (11') и бурильной колонны (11) относительно друг друга в направлении зацепления таким образом, что буровая штанга (11') взаимно соединяется с бурильной колонной (11) резьбовым соединением (112, 111').
2. Способ по п. 1, в котором дополнительно осуществляют смещение в осевом направлении буровой штанги (11') и бурильной колонны (11) в направлении друг к другу.
3. Способ по п. 1 или 2, в котором дополнительно осуществляют:
регистрацию осевого смещения (Z) буровой штанги (11') во время упомянутого вращения и
определение углового положения буровой штанги на основе осевого смещения.
4. Способ по п. 3, в котором определение углового положения буровой штанги (11') включает обнаружение перехода от движения (-Z) буровой штанги от бурильной колонны к перемещению (+Z) штанги к бурильной колонне.
5. Способ по п. 4, в котором дополнительно осуществляют определение увеличения и/или уменьшения в соотношении между осевым и вращательным движением.
6. Способ по п. 3, в котором упомянутое определение углового положения буровой штанги (11') дополнительно содержит последующее обнаружение второго изменения направления от движения (+Z) буровой штанги к бурильной колонне к движению (-Z) буровой штанги от бурильной колонны.
7. Способ по п. 1, в котором упомянутое определение углового положения буровой штанги содержит обнаружение осевого ускорения.
8. Способ по п. 1, в котором упомянутое определение углового положения буровой штанги содержит обнаружение перепада давления в жидкости, используемой для смещения и/или подачи буровой штанги и/или бурильной колонны в направлении друг к другу.
9. Система погрузки-разгрузки штанги, приспособленная для подачи буровой штанги, которая должна быть соединена с бурильной колонной, содержащая:
подвижную руку (21, 22, 23, 24), имеющую средство захвата (137, 137', 135, 137а, 135а; 137b, 135b), выполненное с возможностью захвата буровой штанги (11'),
средство (135, 135а, 138) для вращения буровой штанги (11') и бурильной колонны (11) по отношению друг к другу вокруг их продольной оси (L) в направлении разъединения резьбового соединения (112, 111') и
средство (139а, 139b, 139c, 139d) для обнаружения углового положения буровой штанги, при котором концы резьбы буровой штанги и буровой колонны скользят друг по другу.
10. Система по п. 9, дополнительно содержащая средство (136) для смещения буровой штанги (11') к бурильной колонне (11).
11. Система по п. 9 или 10, в которой захватное средство содержит по меньшей мере один выполненный с возможностью вращения элемент (135, 135а, 135b), имеющий периметр, который приспособлен для фрикционного зацепления наружной стенки буровой штанги.
12. Система по п. 11, в которой выполненный с возможностью вращения элемент (135, 135а, 135b) является в осевом направлении скользящим в направлении (Z), по существу, параллельном продольной оси (L).
13. Система по п. 11, дополнительно содержащая приводное устройство (138), приспособленное для осуществления вращения, выполненного с возможностью вращения элемента (135, 135а, 135b).
14. Система по п. 10, в которой выполненный с возможностью вращения элемент (135, 135а, 135b) смещается в направлении (+Z), по существу, к бурильной колонне (11).
15. Система по п. 10, дополнительно содержащая зажимное приспособление (137, 137', 137а, 137с), которое несет выполненный с возможностью вращения элемент (135, 135а, 135b) таким образом, что выполненный с возможностью вращения элемент (135, 135а, 135b) является скользящим по отношению к зажимному приспособлению, при этом зажимное приспособление выполнено с возможностью перемещения в направлении (Z), по существу, параллельном продольной оси (L).
16. Система по п. 10, в которой средство (139а, 139b, 139c, 139d) для обнаружения углового положения выполнено с возможностью регистрации продольного положения или изменения положения буровой штанги (11') вдоль продольной оси (L) и определения углового положения буровой штанги на основе продольного положения или изменения положения.
17. Адаптированный узел буровой установки, содержащий:
устройство (10) подачи,
бурильное устройство (12), выполненное с возможностью перемещения вдоль устройства (10) подачи к/от бурильной колонны (11), и
систему погрузки-разгрузки штанг по любому из пп. 10-16, при этом система погрузки-разгрузки штанг выполнена с возможностью подъема и/или опускания буровых штанг (11') с/на носитель и для перемещения буровых штанг к/от устройства (10) подачи.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Подвесной пневматический бурильный ключ | 1955 |
|
SU113049A1 |
| Центратор обсадных труб | 1973 |
|
SU636370A1 |
| FR 2860546 A1, 08.04.2005 | |||
| US 5040827 A, 20.08.1991. | |||

