Область техники
Настоящее изобретение в целом относится к производству, и в частности к производству деталей. Еще конкретнее, настоящее изобретение относится к способу и устройству для определения пространства набора конструктивных элементов детали.
Предпосылки
Установленные организациями по стандартизации США, Канады, Германии и Международной организацией по стандартизации (ISO) стандарты могут определять методы и требования для определения набора уровней относящихся к элементам допусков. Тем не менее, обрабатывающая промышленность может не располагать эффективными или действенными способами определения того, соблюдаются ли установленные требования. Кроме того, могут отсутствовать способы для точной оценки влияния компьютерного моделирования на допуски, относящиеся к элементам, имеющим несколько проектных размеров.
При изготовлении таких изделий, как самолеты, необходимо собрать и соединить между собой множество деталей, образующих этот летательный аппарат. В качестве неограничительного примера можно упомянуть, что производство корпуса летательного аппарата включает совмещение конструктивных элементов, таких как отверстия, множества различных деталей.
При проектировании этих деталей и схем расположения отверстий необходимо, чтобы при сборке в эти отверстия устанавливались крепежные детали, или выступы на одних деталях совмещались с отверстиями на других. В размере и размещении этих отверстий могут наблюдаться некоторые отклонения. Приемлемый уровень отклонения в расположении и размере отверстий в соответствии с конкретным стандартом известен как допуск. Например, отклонение в размере отверстий и их расположении можно проанализировать, чтобы определить, можно ли будет надлежащим образом совместить и собрать эти детали вместе.
В настоящее время для определения величины люфта анализируют данные произведенных деталей и данные моделирования деталей. Этот люфт указывает на возможное смещение одной или нескольких деталей. Это смещение может представлять собой поступательное движение или поворот.
Указанный анализ может выполняться в отношении различных параметров отверстий. Эти параметры могут включать размер, месторасположение, форму, ориентацию и другие параметры отверстий.
Для анализа разброса этих и других параметров может использоваться программное обеспечение. Однако имеющиеся в настоящее время программные системы анализа позволяют анализировать схему расположения отверстий только в двух измерениях. Другими словами, определение возможного смещения детали при определенной схеме расположения отверстий осуществляется с учетом только движения в двух измерениях, т.е. в плоскости. Движение может быть поступательным смещением или вращением в плоскости.
В существующих в настоящее время программных системах анализа схемы расположения отверстий не принимаются во внимание другие смещения в других измерениях, кроме указанных двух. Доступность информации только о двух измерениях, а не о трех, может не обеспечить все данные, которые могут потребоваться для проектирования схем расположения отверстий и процессов сборки деталей с использованием этой схемы расположения отверстий. Указанный недостаток информации может привести к повышению трудозатрат и увеличению времени, необходимого для производства самолета.
В частности, используемые в настоящее время программные системы анализа предназначены для предоставления информации о люфте, который может возникнуть по двум осям. Другими словами, поступательное смещение происходит в плоскости. Кроме того, имеющееся в настоящее время программное обеспечение учитывает поворот вокруг одной оси. Другими словами, вращение является вращением в плоскости.
Используемые в настоящее время программные системы анализа не могут предоставить информацию о люфте в трех измерениях с шестью степенями свободы. Другими словами, используемые в настоящее время программные системы анализа не предоставляют информацию о поступательном смещении по трем осям и не предоставляют информацию о вращении вокруг трех осей.
Однако этот тип возможного взаимного смещения деталей является фактическим смещением, которое может происходить, когда детали собраны. Отсутствие этого типа информации может привести к тому, что проекты деталей и инструкции по сборке деталей окажутся не настолько эффективными, как хотелось бы. Эта неэффективность может увеличить время и стоимость производства продукта, поскольку количество деталей в изделии увеличивается.
Например, производство самолета может включать сборку и соединение креплениями десятков или сотен тысяч деталей. Если процесс сборки не является настолько эффективным, насколько требуется, время, необходимое для сборки самолета, может значительно возрасти. Увеличение времени приводит к росту расходов и увеличению времени изготовления самолета, более чем это было бы желательным.
Кроме того, когда детали сложнее собирать, в процессе участвует больше операторов и/или используется больше инструментов для позиционирования, удержания или позиционирования и удержания собираемых деталей. Если требуется больше инструментов, возрастают и затраты на их приобретение и техническое обслуживание. В результате при использовании имеющихся в настоящее время программных систем анализа схем расположения отверстий производство самолета может оказаться более сложным, трудоемким и дорогостоящим, чем это необходимо.
Таким образом, желательно иметь способ и устройство, учитывающие по меньшей мере некоторые из описанных выше проблем, а также другие возможные проблемы.
Краткое описание изобретения
В одном иллюстративном варианте осуществления предложен способ определения возможного смещения детали, содержащей конструктивные элементы. Первые линии строятся компьютерной системой на плоскости и проходят из точки вращения в плоскости в центры конструктивных элементов в схеме расположения конструктивных элементов. Вторые линии строятся компьютерной системой на плоскости и проходят из центров конструктивных элементов, причем вторые линии по существу перпендикулярны соответствующим первым линиям. Третьи линии строятся компьютерной системой и проходят от концов вторых линий, причем третьи линии по существу перпендикулярны плоскости. Компьютерная система строит продолговатые области пространства, простирающиеся от центров конструктивных элементов до концов третьих линий. Компьютерная система строит пересечение продолговатых областей пространств. С помощью указанного пересечения определяется возможное смещение детали, содержащей конструктивные элементы.
В другом иллюстративном варианте осуществления система анализа конструктивных элементов включает в себя анализатор в компьютерной системе. Анализатор выполнен с возможностью построения первых линий на плоскости, проходящих из точки вращения в плоскости в центры конструктивных элементов в схеме расположения конструктивных элементов. Анализатор также выполнен с возможностью построения вторых линий на плоскости, проходящих из центров конструктивных элементов по существу перпендикулярно соответствующим первым линиям. Анализатор также выполнен с возможностью построения третьих линий, проходящих из концов вторых линий по существу перпендикулярно плоскости. Анализатор также выполнен с возможностью построения продолговатых областей пространства, простирающихся от центров конструктивных элементов до концов третьих линий. Анализатор также выполнен с возможностью определения пересечения указанных продолговатых областей пространства. Анализатор также выполнен с возможностью определения возможного смещения детали, содержащей конструктивные элементы, с помощью указанного пересечения.
В еще одном иллюстративном варианте осуществления компьютерный программный продукт включает машиночитаемый запоминающий носитель данных, первый программный код, записанный на машиночитаемом носителе данных, второй программный код, записанный на машиночитаемом носителе данных, третий программный код, записанный на машиночитаемом носителе данных, четвертый программный код, записанный на машиночитаемом носителе данных, пятый программный код, записанный на машиночитаемом носителе данных и шестой программный код, записанный на машиночитаемом носителе данных. Первый программный код предназначен для построения первых линий на плоскости, проходящих из точки вращения в плоскости в центры конструктивных элементов в схеме расположения конструктивных элементов. Второй программный код предназначен для построения вторых линий на плоскости, проходящих из центров конструктивных элементов по существу перпендикулярно соответствующим первым линиям. Третий программный код предназначен для построения третьих линий, проходящих из концов вторых линий по существу перпендикулярно плоскости. Четвертый программный код предназначен для построения продолговатых областей пространства, простирающихся от центров конструктивных элементов до концов третьих линий. Пятый программный код предназначен для определения пересечения указанных продолговатых областей пространства. Шестой программный код предназначен для определения возможного смещения детали, содержащей конструктивные элементы, с помощью указанного пересечения.
Описанные признаки и функции могут обеспечиваться по отдельности в различных вариантах осуществления данного изобретения или могут быть объединены в других вариантах осуществления, которые подробно описаны далее со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
Новые признаки, считающиеся отличительными признаками иллюстративных вариантов осуществления, изложены в прилагаемой формуле изобретения. Однако иллюстративные варианты осуществления, а также предпочтительный способ их применения, дополнительные объекты и их признаки будут более понятны при рассмотрении следующего подробного описания иллюстративного варианта осуществления настоящего изобретения со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 изображена блок-схема системы анализа конструктивных элементов в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.2 изображена схема расположения отверстий в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.3 изображена точка вращения в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.4 изображены первые линии в соответствии с иллюстративным вариантом осуществления изобретения;
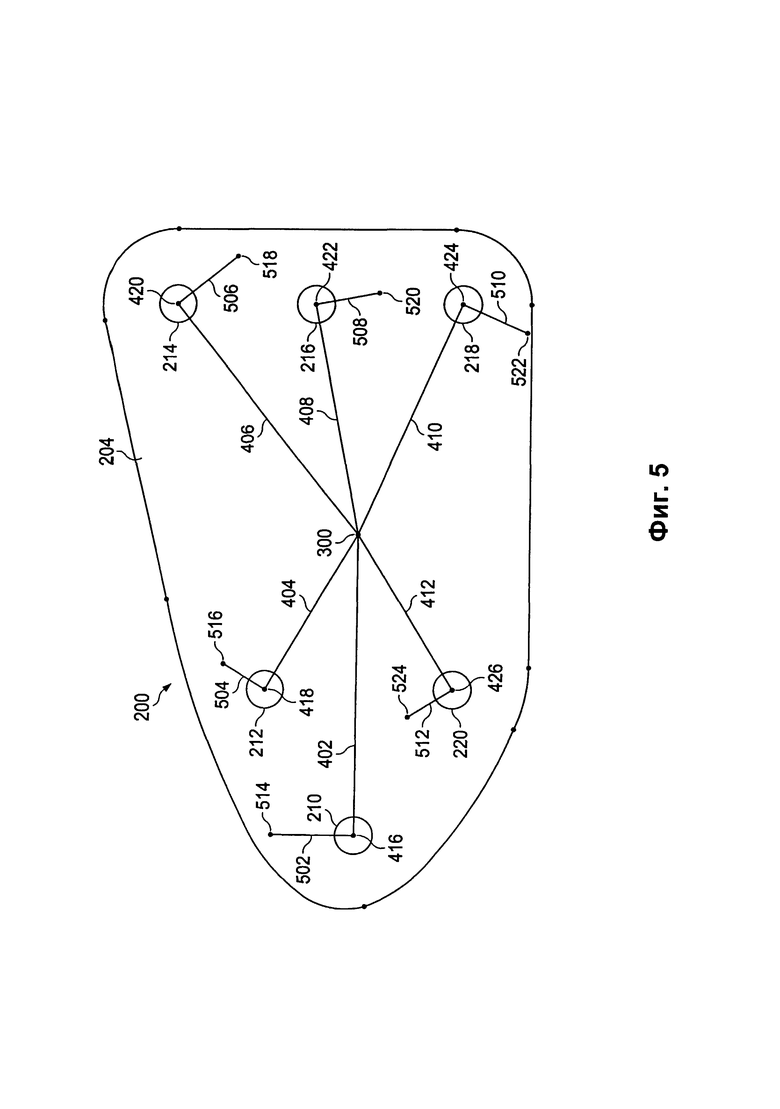
на фиг.5 изображены вторые линии, проведенные по существу перпендикулярно первым линиям, в соответствии с иллюстративным вариантом осуществления изобретения;
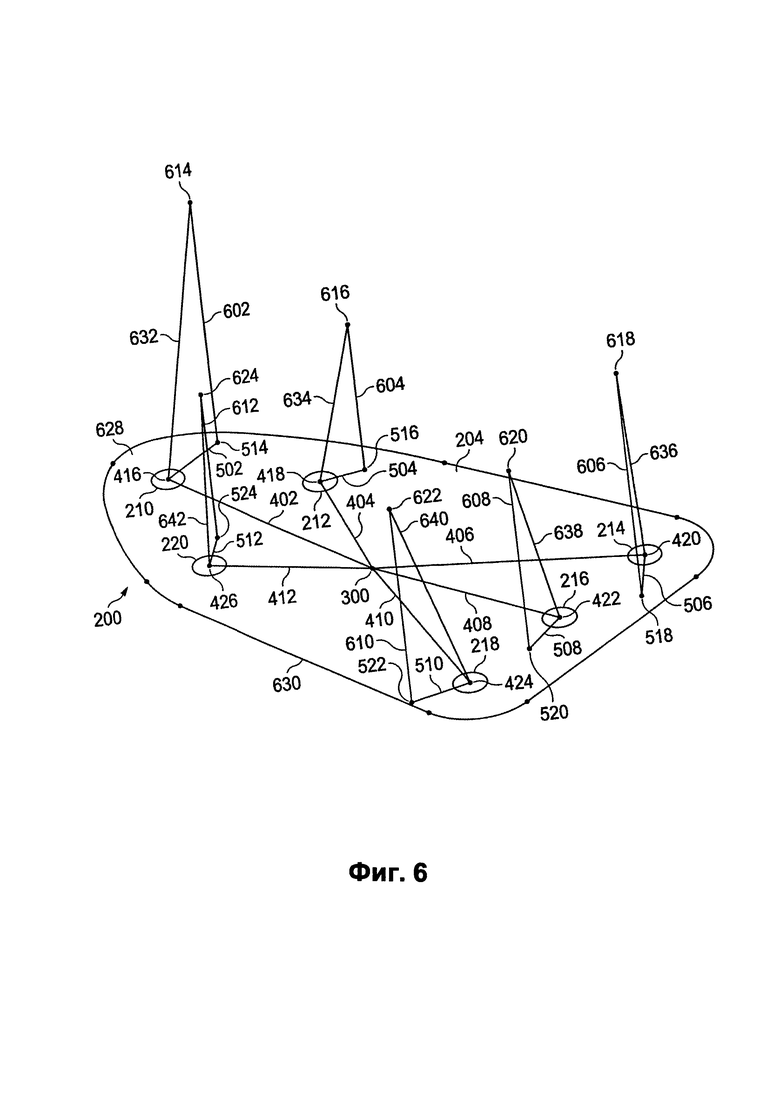
на фиг.6 изображены третьи линии, проведенные из концов вторых линий, в соответствии с иллюстративным вариантом осуществления изобретения;
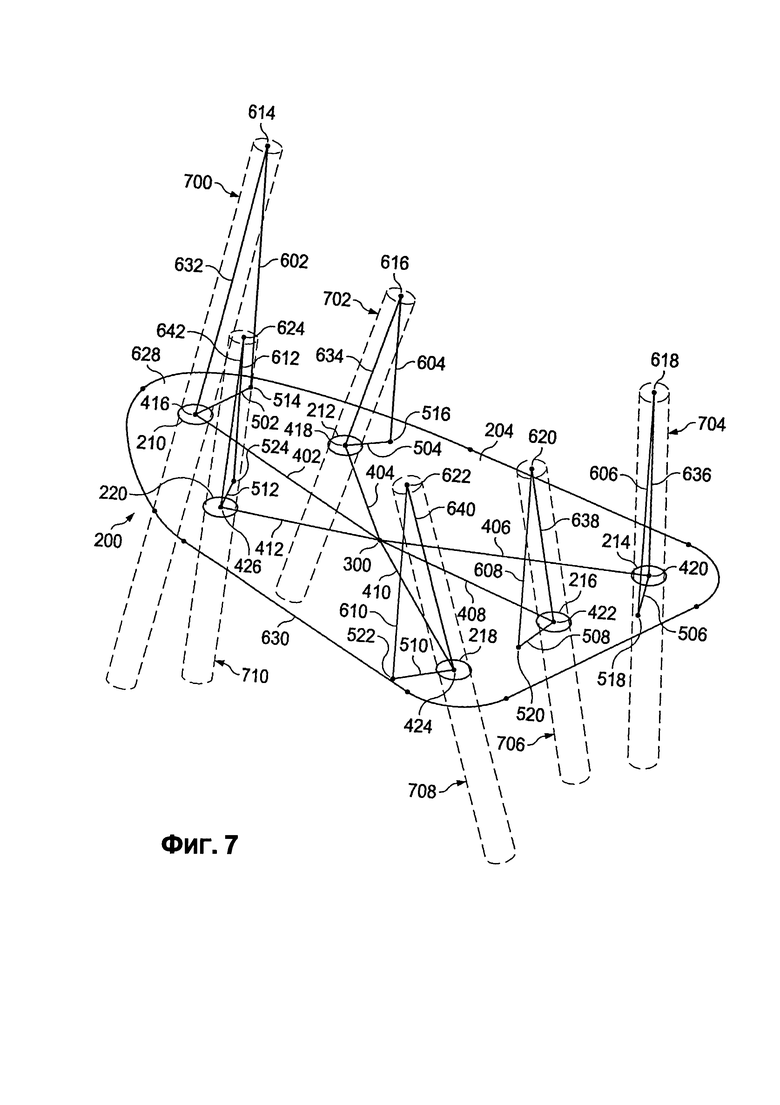
на фиг.7 изображены области пространства, построенные с использованием третьих линий, в соответствии с иллюстративным вариантом осуществления изобретения;
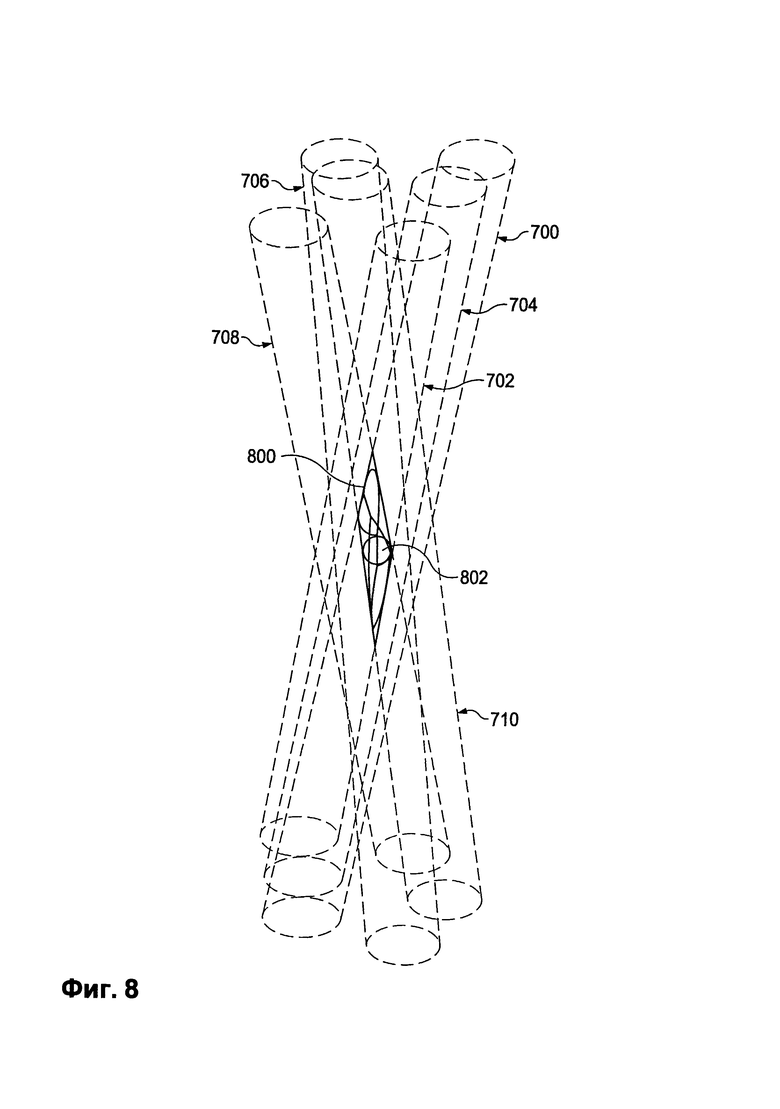
на фиг.8 изображено пересечение цилиндров в соответствии с иллюстративным вариантом осуществления изобретения;
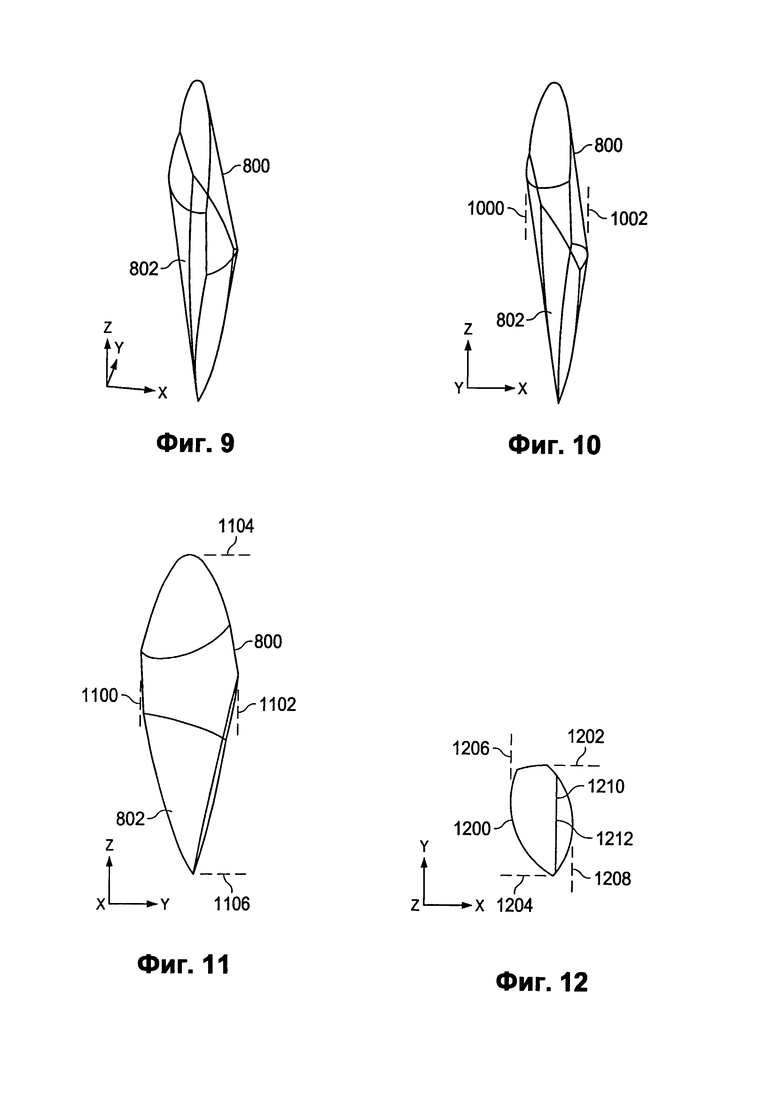
на фиг.9 изображено пересечение в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.10 изображено пересечение, спроектированное на плоскость, в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.11 изображено пересечение, спроектированное на плоскость, в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.12 изображено плоское сечение области пересечения в соответствии с иллюстративным вариантом осуществления изобретения;
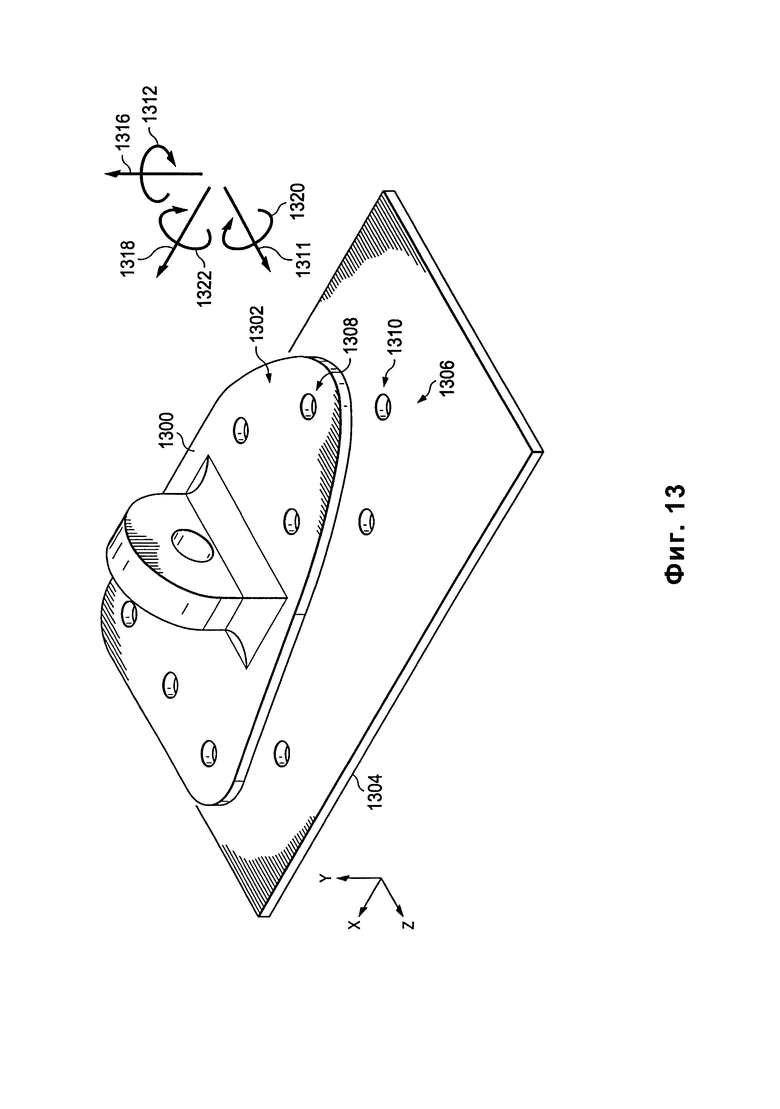
на фиг.13 изображены детали со схемой расположения отверстий в соответствии с иллюстративным вариантом осуществления изобретения;
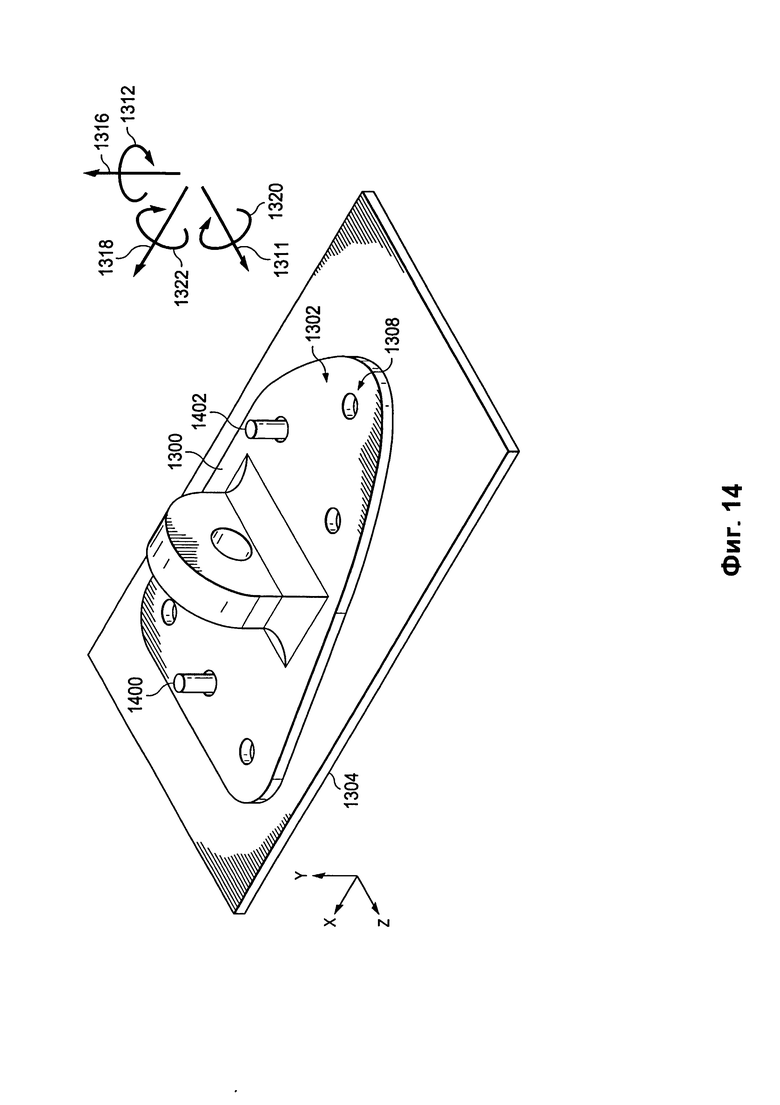
на фиг.14 изображены детали, расположенные относительно друг друга, со штифтами в соответствии с иллюстративным вариантом осуществления изобретения;
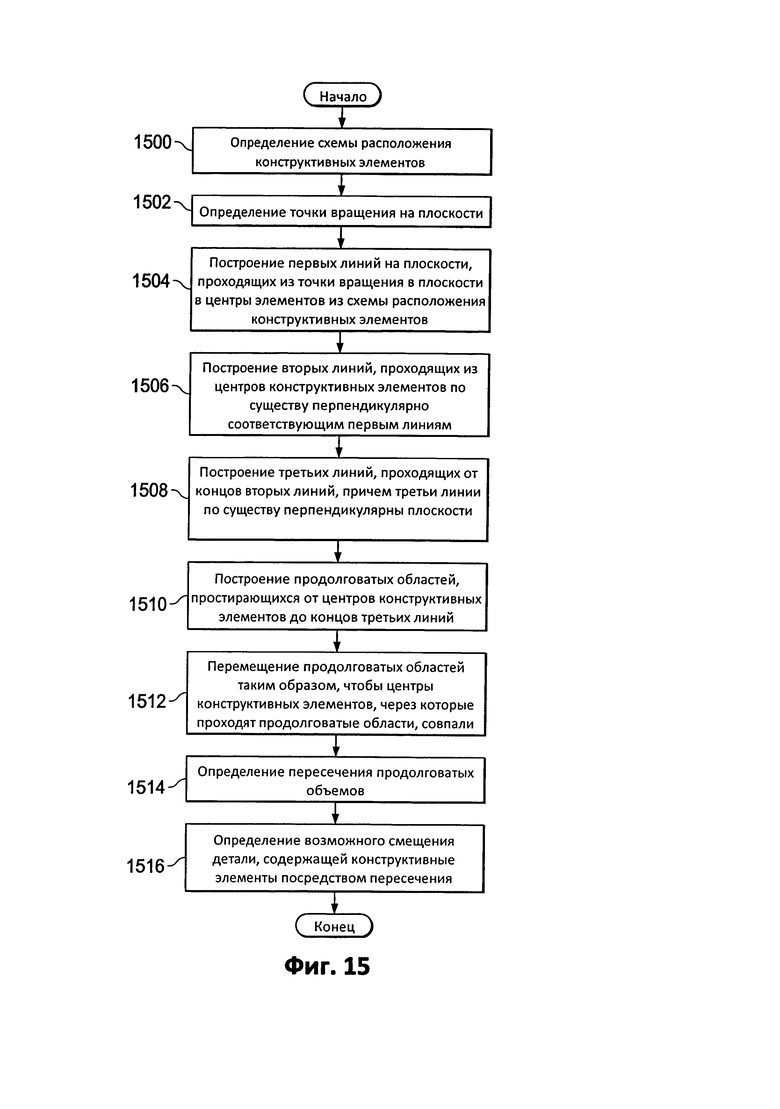
на фиг.15 изображена схема последовательности операций процесса определения возможного смещения детали, содержащей конструктивные элементы, в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.16 изображена блок-схема системы обработки данных в соответствии с иллюстративным вариантом осуществления изобретения;
на фиг.17 изображен способ изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом осуществления изобретения; и
на фиг.18 изображен летательный аппарат, в котором может быть применен иллюстративный вариант осуществления изобретения.
Подробное описание
В иллюстративных вариантах осуществления принимаются во внимание и учитываются один или несколько факторов. Например, иллюстративные варианты осуществления учитывают, что деталь может перемещаться в более чем двух измерениях. В частности, возможное смещение детали относительно другой детали может иметь шесть степеней свободы. Другими словами, деталь может поступательно перемещаться или поворачиваться в нескольких измерениях, в зависимости от используемой схемы расположения конструктивных элементов.
В иллюстративных вариантах осуществления принимается во внимание и учитывается то, что возможность рассмотрения шести степеней свободы, в том числе возможного движения в виде поворота вокруг трех осей, в дополнение к возможному смещению в виде поступательного смещения по трем осям, может предоставить нужное количество информации для проектирования деталей, составления инструкций по выполнению операций по сборке деталей, а также для других целей в зависимости от того, как возможное смещение деталей способно повлиять на сборку деталей.
В иллюстративных вариантах осуществления принимается во внимание и учитывается то, что если имеет место отклонение параметров конструктивных элементов, таких как отверстия, от заданных значений, деталь с измененными относительно заданных значений параметрами может сложнее поддаваться сборке, чем деталь, имеющая требуемые значения параметров. Допустимое отклонение значений параметров от заданных значений может иметь форму допусков.
Иллюстративные варианты осуществления также принимают во внимание и учитывают то, что используемые в настоящее время методы анализа учитывают только движение детали в двух измерениях. Таким образом, другие виды смещений, которые могут иметь место в третьем измерении, не принимаются во внимание доступными в настоящее время программными системами анализа. В результате, расчет детали в сборке с другими деталями может оказаться недостаточно точной. Кроме того, при наличии меньшего количества информации о возможном взаимном смещении деталей проектирование деталей и сборок деталей не может быть настолько эффективным, насколько это требуется при ограниченном объеме информации.
В иллюстративных вариантах осуществления принимается во внимание и учитывается то, что информация о движении деталей в трех измерениях может быть полезной при оценке приемлемых допусков параметров отверстий. Кроме того, при определении смещений деталей в трех измерениях эта информация может быть полезна для определения процессов сборки этих деталей. Например, при наличии большего количества информации проектирование деталей может выполняться таким образом, чтобы уменьшить количество инструментов, необходимых для осуществления и поддержания сборок деталей с использованием набора отверстий.
Кроме того, в иллюстративных вариантах осуществления принимается во внимание и учитывается то, что при наличии информации о движении деталей в трех измерениях проектирование процедур сборки деталей также может быть более эффективным. В иллюстративных вариантах осуществления принимается во внимание и учитывается то, что сокращение количества необходимых для сборки деталей инструментов, времени или того и другого может обеспечить снижение себестоимости деталей и уменьшить время и трудоемкость сборки деталей.
Таким образом, в иллюстративных вариантах осуществления предложен способ и устройство для определения возможного смещения детали, содержащей конструктивные элементы. В одном иллюстративном варианте осуществления компьютерная система строит первые линии на плоскости, проходящие из точки вращения на плоскости в центры конструктивных элементов в схеме расположения конструктивных элементов. Компьютерная система также строит вторые линии на плоскости, которые проходят из центров конструктивных элементов, причем вторые линии по существу перпендикулярны соответствующим первым линиям. Компьютерная система строит третьи линии, проходящие от концов вторых линий, причем третьи линии по существу перпендикулярны плоскости. Продолговатые области пространства, проходящие от центров конструктивных элементов к концам третьих линий, также строятся компьютерной системой. Определяется пересечение продолговатых областей пространства. С помощью указанного пересечения продолговатых областей пространства определяется возможное смещение детали, содержащей конструктивные элементы.
Преимущество иллюстративных вариантов осуществления обеспечивается способом, в котором вторые линии (122) имеют длины (125), пропорциональные соответствующим длинам первых линий (118). Дополнительный вариант осуществления обеспечивает способ, в котором третьи линии (124) имеют одинаковую длину.
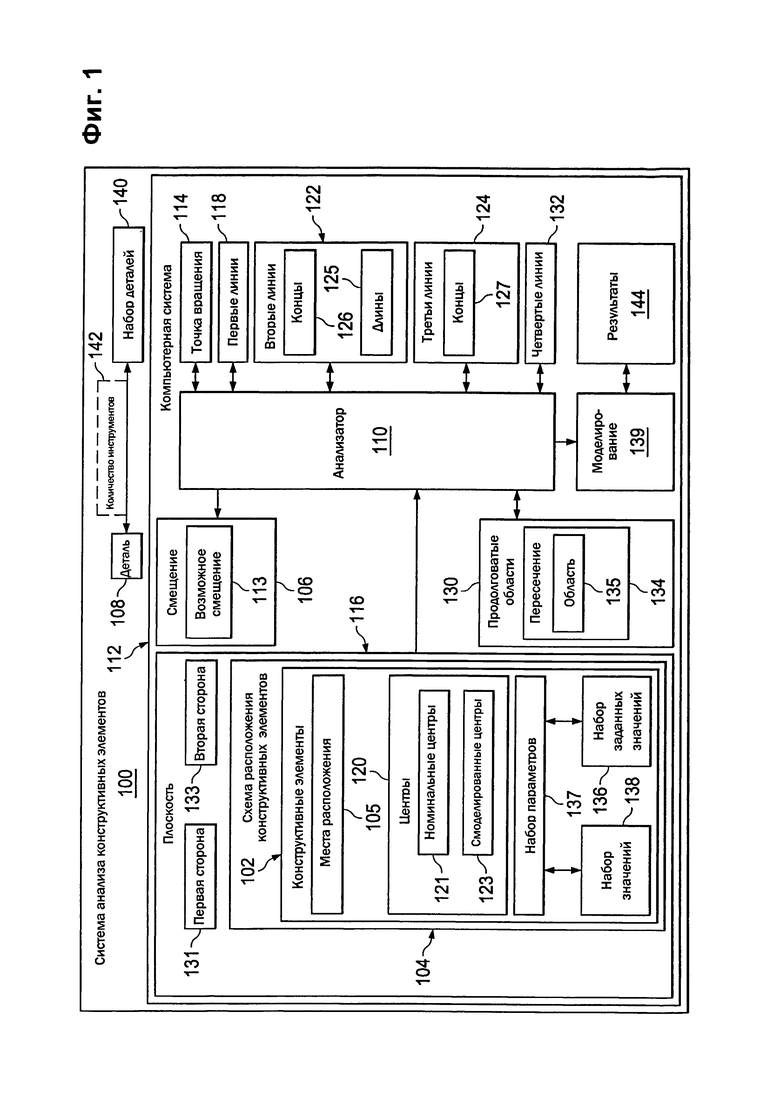
Теперь рассмотрим чертежи, на которых, в частности, на фиг.1 изображена блок-схема системы анализа конструктивных элементов в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере система анализа конструктивных элементов 100 может использоваться для анализа конструктивных элементов 102 в схеме 104 расположения конструктивных элементов.
В этих иллюстративных примерах конструктивные элементы 102 занимают местоположения 105 в схеме 104 расположения конструктивных элементов. В этих иллюстративных примерах местоположения 105 конструктивных элементов 102 образуют схему 104 расположения конструктивных элементов. Элемент из конструктивных элементов 102 может быть выбран по меньшей мере из одного из следующих: отверстие, отверстие с прорезью, прямоугольная щель и другие подходящие типы конструктивных элементов.
Используемое здесь выражение «по меньшей мере один из» применительно к списку конструктивных элементов означает различные сочетания одного или нескольких из перечисленных конструктивных элементов. Например, «по меньшей мере один из конструктивных элементов А, В и С» может включать, без ограничения, элемент А или элемент А и элемент В. Этот пример также может включать элемент А, элемент В и элемент С или элемент В и элемент С.
В этих иллюстративных примерах анализ конструктивных элементов 102 в схеме 104 расположения конструктивных элементов может использоваться для определения смещения 106 детали 108, когда деталь 108 содержит схему 104 расположения конструктивных элементов 102.
В этом иллюстративном примере анализатор 110 сконфигурирован для анализа схемы 104 расположения конструктивных элементов 102.
Анализатор 110 может быть реализован программными средствами, аппаратными средствами или средствами обоих типов. При использовании программного обеспечения выполняемые анализатором 110 операции могут быть реализованы в виде программного кода, предназначенного для исполнения в процессорном блоке. При использовании аппаратного обеспечения аппаратные средства могут включать схемы, которые выполняют операции в анализаторе 110.
В этих иллюстративных примерах аппаратные средства могут быть в виде электронной схемы, интегральной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или какого-либо другого подходящего типа оборудования, реализованного с возможностью выполнения ряда операций. В случае программируемого логического устройства такое устройство сконфигурировано для выполнения ряда операций. Устройство может быть переконфигурировано позднее или же может быть постоянно сконфигурировано для выполнения ряда операций. Примеры программируемых логических устройств включают, например, программируемую логическую матрицу, программируемую матричную логику, логическую матрицу, программируемую пользователем, программируемую пользователем вентильную матрицу и другие подходящие аппаратные средства. Кроме того, процессы могут быть реализованы в органических компонентах, интегрированных с неорганическими компонентами, и/или могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем из органических полупроводников.
В этих иллюстративных примерах анализатор 110 может быть реализован в компьютерной системе 112. Компьютерная система 112 состоит из одного или нескольких компьютеров. При наличии более чем одного компьютера в компьютерной системе 112, эти компьютеры могут осуществлять связь друг с другом через коммуникационную среду, такую как сеть.
В этих иллюстративных примерах анализатор 110 сконфигурирован для определения смещения 106 детали 108, содержащей конструктивные элементы 102 в схеме 104 расположения конструктивных элементов. В этих иллюстративных примерах смещение 106 имеет вид возможного смещения 113. Возможное смещение 113 - это смещение детали 108, которое может происходить, когда деталь 108 включает в себя схему 104 расположения конструктивных элементов 102. Возможное смещение 113 также может называться осевым люфтом детали 108.
При определении возможного смещения 113 детали 108 анализатор 110 в компьютерной системе 112 идентифицирует точку вращения 114. Точка вращения 114 является точкой, выбранной на плоскости 116. Точка вращения 114 может быть выбрана в любом месте на плоскости 116.
Затем анализатор 110 в компьютерной системе 112 строит первые линии 118 на плоскости 116, проходящие из точки вращения 114 на плоскости 116 к элементам 102. В частности, первые линии 118 проходят из точки вращения 114 в центры 120 конструктивных элементов 102.
В этих иллюстративных примерах центры 120 могут быть номинальными центрами 121 или смоделированными центрами 123. Номинальные центры 121 могут быть требуемыми центрами конструктивных элементов 102. Другими словами, требуемые центры находятся в нужных местах. Смоделированные центры 123 могут быть центрами 120, которые, возможно, немного отклоняются от номинальных центров 121.
Например, координаты смоделированных центров 123, возможно, отклонились от координат номинальных центров 121 конструктивных элементов 102. Это отклонение может быть вызвано различиями в методах измерения, отклонениями в процессе производства детали или другими факторами. В некоторых иллюстративных примерах смоделированные центры 123 могут быть номинальными центрами 121, в зависимости от конкретной реализации.
Кроме того, анализатор 110 строит вторые линии 122 на плоскости 116, проходящие из центров 120 конструктивных элементов 102 по существу перпендикулярно к соответствующим первым линиям 118. Другими словами, вторая линия из вторых линий 122 проходит из одного из центров 120 в направлении, по существу перпендикулярном первой линии из первых линий 118, соответствующей конкретному конструктивному элементу 102.
В этих иллюстративных примерах вторые линии 122 проходят по существу перпендикулярно первым линиям 118, проходящим из точки вращения 114 в центры 120 конструктивных элементов 102 в том же направлении, что и первые линии 118. Например, это направление может быть по часовой стрелке или против часовой стрелки относительно первых линий 118, проходящих из точки вращения 114.
Вторые линии 122 имеют значения длины 125. Длины 125 пропорциональны соответствующим первым линиям 118. Другими словами, для длины из длин 125 второй линии из вторых линий 122 имеется фиксированный коэффициент пропорциональности. Этот коэффициент пропорциональности умножается на длину первой линии из первых линий 118, из которой проходит вторая линий из вторых линий 122.
Анализатор 110 строит третьи линии 124 по существу перпендикулярно плоскости 116 от концов 126 вторых линий 122. В этих иллюстративных примерах третьи линии 124 проходят в направлении, по существу перпендикулярном плоскости 116. Затем анализатор 110 строит продолговатые области 130, проходящие из центров 120 конструктивных элементов 102 к концам 127 третьих линий 124. В этом иллюстративном примере продолговатые области 130, проходящие из центров 120 конструктивных элементов 102 к концам 127 третьих линий 124, расположены на первой стороне 131 плоскости 116.
В этих иллюстративных примерах продолговатые области 130 могут быть образованы вокруг четвертых линий 132, проходящих через центры 120 конструктивных элементов 102 и концы 126 третьих линий 124. Как изображено на чертеже, четвертые линии 132 могут проходить по центральной оси через продолговатые области 130.
Кроме того, продолговатые области 130 также могут проходить из центров 120 конструктивных элементов 102 в противоположном направлении, таким образом, что продолговатые области 130 также находятся на второй стороне 133 плоскости 116. Другими словами, продолговатые области 130 могут проходить вокруг четвертых линий 132 на второй стороне 133. Длины продолговатых пространств 130 могут быть по существу одинаковыми на первой стороне 131 и на второй стороне 133 плоскости 116.
Затем анализатор 110 определяет пересечение 134 продолговатых областей 130. В этих иллюстративных примерах пересечение 134 может быть определено путем смещения центров 120 на плоскости 116 таким образом, чтобы центры 120 имели общую точку. Другими словами, продолговатые пространства 130 можно переместить таким образом, чтобы центры 120, из которых эти продолговатые области 130 простираются, имели одинаковое положение на плоскости 116. В частности, в этих иллюстративных примерах продолговатые области 130 можно переместить таким образом, чтобы номинальные центры 121, из которых эти продолговатые области 130 простираются, имели одинаковое положение на плоскости 116.
В этих иллюстративных примерах пересечение 134 имеет форму области 135. Если продолговатые области 130 не пересекаются, пересечение 134 не будет получено. В данных иллюстративных примерах, если имеется несколько пересечений 134, деталь 108 не может быть совмещена с такой же деталью.
Пересечение 134 представляет возможное смещение 113 детали 108, если деталь 108 включает конструктивные элементы 102 в схеме 104 расположения конструктивных элементов. В частности, возможное смещение 113 может происходить в трех измерениях. В этих иллюстративных примерах возможное смещение 113 может включать в себя по меньшей мере одно из поступательного и вращательного движения в трех измерениях.
Как изображено на рисунке, область 135 пересечения 134 может указывать, насколько деталь 108 может перемещаться относительно другой детали, имеющей конструктивные элементы 102 с набором заданных значений 136 для набора параметров 137. Набор параметров 137 может включать, например, по меньшей мере один из следующих параметров: место расположения центра отверстия, размер отверстия, ориентация отверстия и другие подходящие параметры. Набор заданных значений 136 может быть одним или несколькими значениями, указанными в проекте схемы расположения конструктивных элементов 104. Набор заданных значений 136 также может именоваться как правильные значения для набора параметров 137.
В этих иллюстративных примерах возможное смещение 113 является смещением детали 108, содержащей конструктивные элементы 102, с набором значений 138 для набора параметров 137. Набор значений 138 представляет собой одно или несколько значений для набора параметров 137, которые используются при формировании схемы расположения конструктивных элементов 104 в детали 108 физически или в процессе моделирования.
Набор значений 138 для набора параметров 137 может изменяться или отличаться от набора заданных значений 136 для набора параметров 137. Набор заданных значений 136 представляет собой одно или несколько значений набора параметров 137, которые используются при формировании конструктивных элементов 102 требуемым образом.
Набор значений 138 может быть набором фактических значений, полученных в процессе формирования конструктивных элементов 102. В этих иллюстративных примерах отклонение набора значений 138 от набора заданных значений 136 может повлиять на пересечение 134. В некоторых случаях пересечение 134 может отсутствовать, если набор значений 138 отличается от набора заданных значений 136 на некоторую величину.
При наличии возможного смещения 113 анализатор 110 может выполнить моделирование 139 для детали 108, включающей конструктивные элементы 102 по схеме 104 расположения конструктивных элементов. Моделирование 139 может быть выполнено для сборки детали 108 с несколькими деталями 140, посредством набора инструментов 142. Таким образом, результаты 144 моделирования 139 могут использоваться для определения операций по сборке детали 108 с набором деталей 140, количества инструментов 142 для сборки детали 108 с набором деталей 140, изменений в схеме 104 расположения конструктивных элементов и других соответствующих операций.
В этих иллюстративных примерах определения возможного смещения 113 в трех измерениях возможно сокращение количества инструментов 142, используемых для сборки детали 108 с набором деталей 140. Кроме того, инструкции по выполнению операций для сборки детали 108 с набором деталей 140 также могут быть более эффективными. Также можно уменьшить количество операторов, участвующих в сборке детали 108 с набором деталей 140. Эти и другие пути повышения эффективности могут быть получены посредством анализатора 110, который служит для определения возможного смещения 113.
В результате, можно уменьшить время и трудоемкость сборки детали 108 с набором деталей 140. Таким образом, производство такого изделия, как летательный аппарат, в котором используется деталь 108 и набор деталей 140, может осуществляться с меньшими затратами и быстрее посредством иллюстративного варианта осуществления изобретения.
Иллюстрация системы анализа конструктивных элементов 100 на фиг.1 не предназначена для того, чтобы налагать физические или архитектурные ограничения на реализацию системы анализа конструктивных элементов. В дополнение или вместо проиллюстрированных компонентов могут использоваться другие компоненты. Некоторые компоненты могут быть необязательными. Кроме того, блоки на схемах иллюстрируют определенные функциональные компоненты. Один или несколько таких блоков могут быть объединены, разделены или объединены и разделены на различные блоки при реализации иллюстративного варианта.
Например, в некоторых иллюстративных примерах анализатор 110 в системе анализа конструктивных элементов 100 может использоваться для анализа набора конструктивных элементов 104 в уже изготовленных деталях. В еще одном иллюстративном примере анализатор 110 может использоваться для анализа проектов схемы расположения конструктивных элементов 104. В других иллюстративных примерах анализатор 110 может быть частью системы автоматизированного проектирования.
В этих иллюстративных примерах конструктивные элементы 102 могут иметь несколько размеров. Например, различные конструктивные элементы в наборах конструктивных элементов 104 могут иметь различные размеры. Кроме того, различные типы конструктивных элементов могут присутствовать среди конструктивных элементов 102 в схеме 104 расположения конструктивных элементов. Кроме того, плоскость 116 может определять поверхность детали, где расположены конструктивные элементы 102 набора конструктивных элементов 104. Конечно, в других иллюстративных примерах деталь 108 может не иметь плоскую поверхность, которая может соответствовать плоскости 116. Деталь 108 может иметь криволинейную форму или другую неплоскую форму в зависимости от конкретной реализации.
Далее рассматриваются фиг.2-11, где проиллюстрированы операции, выполняемые для определения возможного смещения детали со схемой расположения отверстий в соответствии с иллюстративным вариантом осуществления изобретения. Различные операции, изображенные на этих чертежах, могут быть реализованы в системе анализа конструктивных элементов 100 с использованием анализатора 110 согласно фиг.1.
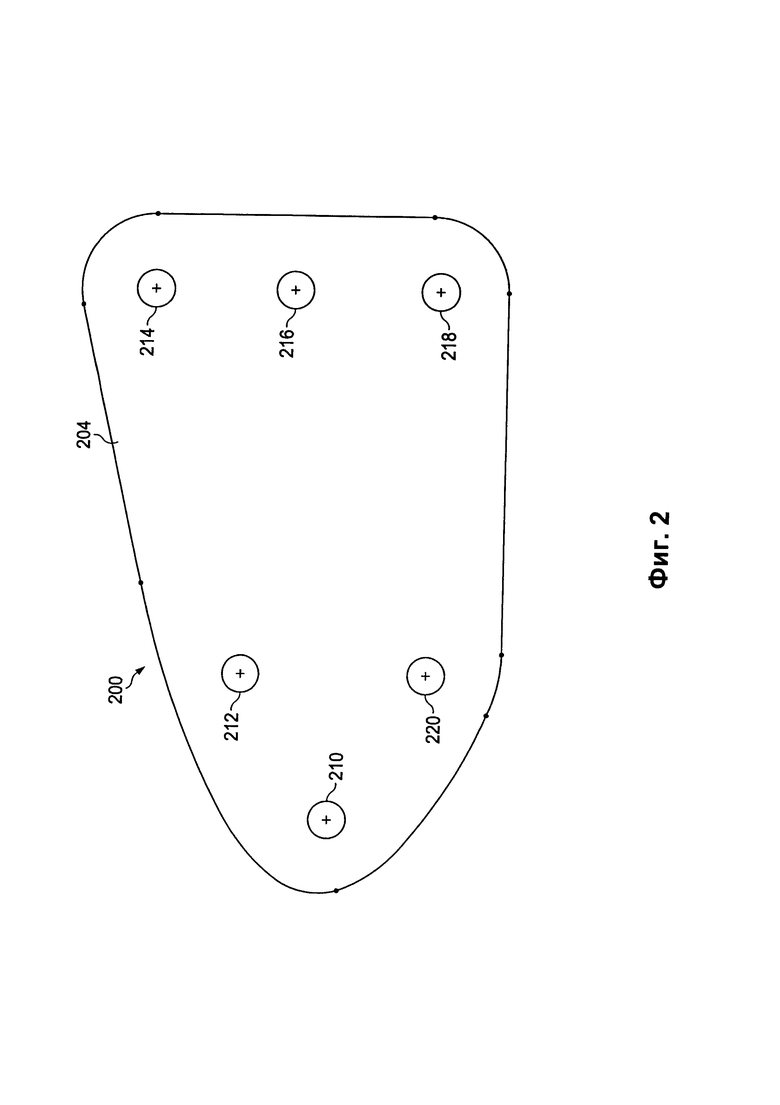
На фиг.2 изображена схема расположения отверстий в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере схема расположения отверстий 200 является примером реализации схемы расположения конструктивных элементов 104 на фиг.1. Как показано, схема расположения отверстий 200 реализована на плоскости 204. В этом иллюстративном примере схема расположения отверстий 200 включает в себя отверстие 210, отверстие 212, отверстие 214, отверстие 216, отверстие 218 и отверстие 220.
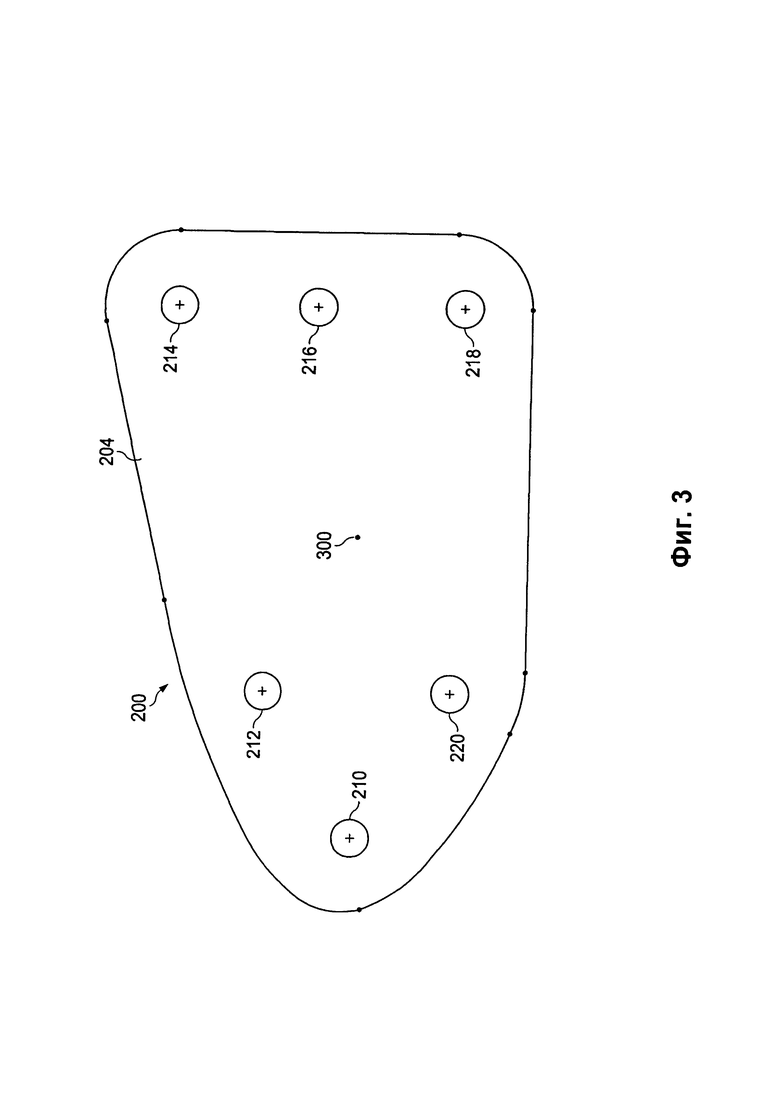
На фиг.3 изображена точка вращения в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере точка 300 вращения выбрана на плоскости 204. Точка 300 вращения изображена таким образом, что она занимает по существу центральное место среди отверстий. Конечно, в других иллюстративных примерах точка 300 вращения может быть расположена в других местах, отличных от изображенной позиции.
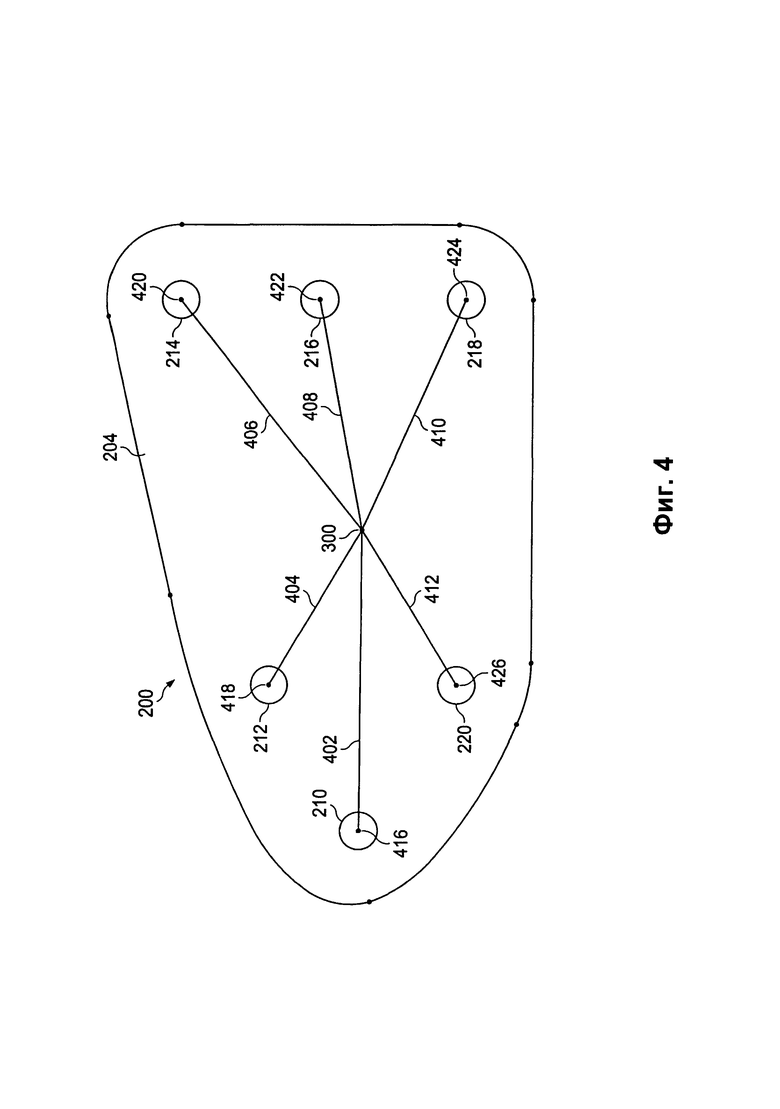
На фиг.4 изображены первые линии в соответствии с иллюстративным вариантом осуществления изобретения. В этом изображенном примере первые линии проходят от точки 300 вращения к центрам отверстий в схеме расположения отверстий 200. Эти центры являются примером одной из реализации центров 120 на фиг.1. Конкретнее, центры могут быть смоделированными центрами 123 на фиг.1.
Как показано, первые линии включают в себя первую линию 402, первую линию 404, первую линию 406, первую линию 408, первую линию 410 и первую линию 412. В этом иллюстративном примере первая линия 402 проходит из точки 300 вращения к отверстию 210. Первая линия 404 проходит из точки 300 вращения к отверстию 212. Первая линия 406 проходит из точки 300 вращения к отверстию 214. Первая линия 408 проходит из точки 300 вращения к отверстию 216. Первая линия 410 проходит из точки 300 вращения к отверстию 218 и первая линия 412 проходит из точки 300 вращения к отверстию 220.
В частности, первые линии проходят от точки 300 вращения к центрам отверстий в схеме расположения отверстий 200. В этом примере первая линия 402 тянется к центру 416 отверстия 210, первая линия 404 тянется к центру 418 отверстия 212, первая линия 406 тянется к центру 420 отверстия 214, первая линия 408 тянется к центру 422 отверстия 216, первая линия 410 тянется к центру 424 отверстия 218, и первая линия 412 тянется к центру 426 отверстия 220.
Центры отверстий являются центрами, определяемыми набором значений, установленных для отверстий. Другими словами, значения местоположения центров могут не быть номинальными центрами 121 на фиг.1. Номинальные центры 121 могут быть заданными значениями для центров и могут находиться в другом месте, чем изображенные центры в этом иллюстративном примере.
На фиг.5 изображены вторые линии, проведенные по существу перпендикулярно первым линиям, в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере вторые линии проходят в направлении, по существу перпендикулярном первым линиям.
В этом иллюстративном примере вторая линия 502 по существу перпендикулярная первой линии 402. Кроме того, вторая линия 504 по существу перпендикулярна первой линии 404, вторая линия 506 по существу перпендикулярна первой линии 406, вторая линия 508 по существу перпендикулярна первой линии 408, вторая линия 510 по существу перпендикулярна первой линии 410, и вторая линия 512 по существу перпендикулярна первой линии 412.
В этих иллюстративных примерах вторые линии имеют одно и то же направление по отношению к первым линиям. Как показано на чертеже, вторые линии проходят в направлении по часовой стрелке относительно точки 300 вращения в первых линиях. Конечно, в других иллюстративных примерах вторые линии могут проходить в противоположном направлении - против часовой стрелки - по отношению к точке вращения 300 в первых линиях.
В этих иллюстративных примерах вторые линии имеют длину, пропорциональную длине первых линий. Иными словами, одна и та же пропорция используется для определения длины каждой из вторых линий. Таким образом, вторые линии могут иметь различную длину в зависимости от длин соответствующих первых линий.
Как показано на чертеже, вторая линия 502 имеет конец 514, вторая линия 504 имеет конец 516, вторая линия 506 имеет конец 518, вторая линия 508 имеет конец 520, вторая линия 510 имеет конец 522, и вторая линия 512 имеет конец 524.
На фиг.6 изображены третьи линии, проведенные из концов вторых линий, в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере третьи линии тянутся от концов вторых линий. В этом иллюстративном примере третья линия 602 тянется от конца 514 второй линии 502, третья линия 604 тянется от конца 516 второй линии 504, третья линия 606 тянется от конца 518 второй линии 506, третья линия 608 тянется от конца 520 второй линии 508, третья линия 610 тянется от конца 522 второй линии 510, и третья линия 612 тянется от конца 524 второй линии 512.
В этих иллюстративных примерах третьи линии имеют концы. Как показано на чертеже, третья линия 602 имеет конец 614, третья линия 604 имеет конец 616, третья линия 606 имеет конец 618, третья линия 608 имеет конец 620, третья линия 610 имеет конец 622, и третья линия 612 имеет конец 624.
Как можно видеть, каждая из этих линий проходит по существу перпендикулярно плоскости 204 из концов вторых линий. В этом иллюстративном примере третьи линии изображены как проходящие от первой стороны 628 плоскости 204, но не от второй стороны 630 плоскости 204. Конечно, эти третьи линии также могут проходить в другом направлении от плоскости 204. Как изображено на чертеже, третьи линии имеют одинаковую длину. Длина третьих линий может определять масштаб областей, построенных на фиг.7, рассмотренных ниже.
В этих иллюстративных примерах четвертые линии могут быть образованы, используя центры отверстий и концы третьих линий. В частности, четвертая линия 632 тянется от центра 416 отверстия 210 к концу 614 третьей линии 602. Четвертая линия 634 тянется от центра 418 отверстия 212 к концу 616 третьей линии 604. Четвертая линия 636 тянется от центра 420 отверстия 214 к концу 618 третьей линии 606. Четвертая линия 638 тянется от центра 422 отверстия 216 к концу 620 третьей линии 608. Четвертая линия 640 тянется от центра 424 отверстия 218 к концу 622 третьей линии 610, а четвертая линия 642 тянется от центра 426 отверстия 220 к концу 624 третьей линии 612.
Далее рассматривается фиг.7, где изображены области, построенные с использованием третьих линий, в соответствии с иллюстративным вариантом осуществления изобретения. В этом проиллюстрированном примере строят цилиндры, проходящие от центров отверстий к концам третьих линий на первой стороне 628 плоскости 204.
Например, цилиндр 700 проходит от центра 416 отверстия 210 к концу 614 третьей линии 602. Цилиндр 702 проходит от центра 418 отверстия 212 к концу 616 третьей линии 604. Цилиндр 704 проходит от центра 420 отверстия 214 к концу 618 третьей линии 606. Цилиндр 706 проходит от центра 422 отверстия 216 к концу 620 третьей линии 608. Цилиндр 708 проходит от центра 424 отверстия 218 к концу 622 третьей линии 610. Цилиндр 710 проходит от центра 426 отверстия 220 к концу 624 третьей линии 612.
В этом проиллюстрированном примере цилиндры также проходят от центров отверстий на второй стороне 630 плоскости 204. Длина цилиндров на второй стороне 630 такая же, как и на первой стороне 628.
На фиг.8 изображено пересечение цилиндров в соответствии с иллюстративным вариантом осуществления изобретения. В этом показанном примере цилиндры, изображенные на фиг.7, сдвинуты таким образом, что номинальные центры 121 кругов на фиг.1, образующих цилиндры, имеют одно и то же положение на плоскости 204 на фиг.2. В этом иллюстративном примере местоположение соответствует точке вращения 300 на фиг.3. Конечно, местоположение может быть любой точкой на плоскости 204 или даже на другой плоскости, в зависимости от конкретной реализации.
Как изображено на чертеже, эти цилиндры имеют пересечение 800. Пересечение 800 имеет форму области 802. Область 802 пересечения 800 определяет потенциальное смещение детали со схемой расположения отверстий 200 на фиг.3.
На фиг.9 изображено пересечение в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере изображено только пересечение 800. Пересечение 800 определяет возможное смещение между двумя деталями.
Одна деталь имеет набор значений параметров набора отверстий 200. Другая деталь имеет заданные значения для набора отверстий 200. В некоторых иллюстративных примерах набор значений параметров набора отверстий 200 может быть не таким же, как заданные значения параметров набора отверстий 200.
В этом иллюстративном примере пересечения 800 определяет возможное смещение в виде двух поступательных и одного вращательного движения детали с набором отверстий 200. Точка в пересечении 800 может быть выбрана таким образом, чтобы обеспечить значения поступательного смещения и вращения между двумя деталями, которые должны быть соединены друг с другом. Точка снаружи пересечения 800 может быть положением, которое не может быть достигнуто без непредусмотренного взаимодействия между одной из двух деталей и креплением.
В этих иллюстративных примерах плоскость ху при z=0 аналогична той, которую имеющиеся в настоящее время программные системы анализа могут идентифицировать для определения люфта отверстий в двух измерениях на плоскости. В противоположность этому анализатор 110 на фиг.1 способен определять пересечение 800, которое является трехмерным, а не двухмерным в плоскости. Таким образом, определение вращения и поступательного смещения может осуществляться в трех измерениях, а не в двух.
На фиг.10 изображено пересечение, спроектированное на плоскость, в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере пересечение 800 изображено в виде проекции на плоскость, заданной осями z и х. Линия 1000 и линия 1002 определяют диапазон значений х области 802 пересечения 800. Область 802 может представлять значения поступательного смещения по осям х, y и вращения вокруг оси z. Другими словами, область 802 может представлять возможные значения для поступательного смещения и вращения на будущих этапах моделирования. Значения в диапазоне величин х могут использоваться для определения значения х, используемого при моделировании.
На фиг.11 изображено пересечение, спроектированное на плоскость, в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере пересечение 800 изображено в виде проекции на плоскость, заданной осями z и y.
Как изображено на чертеже, линия 1100 и линия 1102 определяют диапазон значений y области 802 пересечения 800. Линия 1104 и линия 1106 представляют диапазон значений z области 802 пересечения 800. Этот диапазон значений y и z может использоваться для определения значения y и z с целью использования на последующих этапах моделирования.
На фиг.12 изображено сечение области пересечения плоскостью в соответствии с иллюстративным вариантом осуществления изобретения. В этом изображенном примере плоское сечение 1200 получают путем выбора значения для оси z в области 802 пересечения 800 на фиг.8.
В этом примере линия 1202 и линия 1204 указывают диапазон значений по оси y, а линия 1206 и линия 1208 указывают диапазон значений по оси х. В плоском сечении 1200 можно выбрать линию 1210. Линия 1210 представляет собой выбранное значение х в плоском сечении 1200 области 802.
В этих иллюстративных примерах также изображена точка 1212. Точка 1212 представляет значение у, выбранное для моделирования.
Изображения пересечения 800 и области 802 на фиг.8-12 не предназначены для ограничения способа конфигурации моделирования. Например, хотя иллюстративные варианты осуществления описаны путем выбора значений в порядке: значение z, значение х, значение y на фиг.9-12, значения могут быть выбраны в любом порядке. Другими словами, любое из этих значений может быть выбрано первым на основе области 802 и использоваться на будущих этапах моделирования, чтобы определить два других значения. После того, как все три координаты точки внутри области 802 выбраны, можно смоделировать движение этой детали.
Иллюстрация отверстий в схеме расположения отверстий 200 на фиг.2-12 не предназначены для какого-либо ограничения реализации различных иллюстративных вариантов осуществления. Иллюстрация схемы 200 расположения отверстий должна служить лишь в качестве иллюстративного примера схемы расположения отверстий, для которой может быть проведен анализ посредством иллюстративного варианта осуществления.
Например, количество отверстий может быть отличным от шести. В качестве примера, в других иллюстративных примерах, схема расположения отверстий может включать два отверстия, пять отверстий, одиннадцать отверстий или иное количество отверстий. Кроме того, отверстия могут иметь различные размеры, а не одинаковые, как в изображенной схеме 200 расположения отверстий.
В других иллюстративных примерах могут использоваться другие типы конструктивных элементов, причем они могут быть одинаковыми или различными. Например, могут использоваться прямоугольные пазы вместе с круглыми отверстиями или вместо них.
Таким образом, значения набора параметров, выбранных в пределах пересечения 800, могут быть получены посредством гауссова распределения, равномерного распределения или какого-либо иного подходящего типа распределения. Кроме того, путем выбора значений в пересечении 800 на оси х, y и z можно посредством более точного моделирования определить возможное смещение одной детали относительно другой.
На фиг.13 изображены детали в схеме распределения отверстий в соответствии с иллюстративным вариантом осуществления изобретения. В этом иллюстративном примере деталь 1300 имеет схему 1302 расположения отверстий, а деталь 1304 - схему 1306 расположения отверстий. Схема 1302 расположения отверстий и схема 1306 расположения отверстий являются примерами реализации набора отверстий 104, указанного на блок-схеме на фиг.1. В частности, схема расположения отверстий 1302 и схема расположения отверстий 1306 могут быть основаны на схеме 200 расположения отверстий на фиг.2.
В этом иллюстративном примере изображения детали 1300 и детали 1304 являются изображениями, полученными при моделировании детали 1300 и детали 1304 с использованием анализатора 110 на фиг.1. Отверстия 1308 в схеме 1302 расположения отверстий могут иметь значения местоположения центров отверстий 1308. Отверстия 1310 в схеме 1306 расположения отверстий могут иметь заданные значения местоположения центров отверстий 1310. Другими словами, хотя схема 1302 расположения отверстий и схема 1306 расположения отверстий одинаковы, значения различных параметров, таких как моделируемые местоположения центров этих схем расположения отверстий и моделируемые размеры отверстий могут отличаться у схем расположения отверстий.
В этом иллюстративном примере деталь 1300 может поступательно перемещаться в направлении оси z 1311, оси x 1318 и оси y 1316. Кроме того, может иметь место вращение вокруг оси y 1316, оси z 1311 и оси x 1318, как указано стрелкой 1312, стрелкой 1320 и стрелкой 1322, соответственно, в этих иллюстративных примерах. Как показано на чертеже, деталь 1300 имеет шесть степеней свободы относительно детали 1304.
Моделирование может быть выполнено путем размещения крепежных конструктивных элементов или штифтов в отверстиях 1308 в детали 1300 и отверстиях 1310 в детали 1304. Это моделирование возможного смещения может выполняться с использованием анализатора 110 на фиг.1. Величина возможного смещения может меняться, поскольку различные значения показателей отверстий 1308 в схеме 1302 расположения отверстий детали 1300 отличаются от заданных значений для отверстий 1310 в схеме 1306 расположения отверстий детали 1304. Кроме того, другие значения, отличные от заданных значений, могут также использоваться для отверстий 1310 в схеме расположения отверстий 1306 в зависимости от конкретной реализации.
Теперь рассмотрим фиг.14, где изображены детали, расположенные друг относительно друга, со штифтами, в соответствии с иллюстративным вариантом осуществления изобретения. В этом примере деталь 1300 располагается относительно детали 1304 таким образом, что схема 1302 расположения отверстий по существу совмещена со схемой 1306 расположения отверстий (не показана).
В этом примере штифт 1400 и штифт 1402 установлены в отверстия 1308 и отверстия 1310 (не показаны). При использовании пересечения, определенного анализатором 110 на фиг.1, можно получить более точное моделирование величины возможного смещения между деталью 1300 и деталью 1304 в трех измерениях. Таким образом, может быть получена более точная оценка легкости сборки детали 1300 с деталью 1304.
Кроме того, благодаря более точному моделированию возможного смещения этих деталей можно точнее определить, какие инструменты могут потребоваться для сборки этих деталей, в дополнение к определению операций, выполняемых при сборке деталей. Например, можно определить, что выбранные значения параметров, таких как местоположения центров отверстий 1308 и отверстий 1310, ближе к заданным значениям, могут упростить сборку детали 1300 с деталью 1304. Кроме того, меньшее различие между значениями параметров и заданными значениями может уменьшить время, необходимое для сборки, количество инструментов, число операторов и объем других ресурсов, необходимых для сборки детали 1300 с деталью 1304.
Иллюстрации моделирования детали 1300 и детали 1304 на фиг.13 и фиг.14 не предназначены для ограничения способов осуществления других вариантов моделирования. Например, в других иллюстративных примерах может выполняться моделирование других деталей, отличных от детали 1300 и детали 1304. Кроме того, могут использоваться другие количества деталей. В некоторых иллюстративных примерах моделирование может включать три, четыре или некоторое другое количество деталей с некоторой схемой расположения отверстий. В других иллюстративных примерах могут моделироваться другие типы конструктивных элементов, отличных от отверстий.
Теперь рассмотрим фиг.15, где изображена схема последовательности операций процесса определения возможного смещения детали, содержащей конструктивные элементы, в соответствии с иллюстративным вариантом осуществления изобретения. Способ, проиллюстрированный на фиг.15, может быть реализован с использованием анализатора 110 на фиг.1. В частности, этот процесс может быть реализован для анализа схемы 104 расположения конструктивных элементов с элементами 102 детали 108 на фиг.1.
Процесс начинается с определения схемы расположения конструктивных элементов, содержащей конструктивные элементы для анализа (операция 1500). В этих иллюстративных примерах конструктивные элементы в схеме расположения конструктивных элементов расположены в плоскости. Конечно, эти конструктивные элементы могут быть одного типа или различных типов и могут иметь различные параметры для различных конструктивных элементов одного или разных типов. Например, если конструктивные элементы включают в себя отверстия, отверстия могут иметь различные диаметры. В других иллюстративных примерах отверстия могут иметь центры, местоположения которых совпадают или не совпадают с заданными местами расположения центров отверстий.
Точка вращения определяется на плоскости (операция 1502). Эта точка вращения может быть расположена в любом месте по отношению к конструктивным элементам. В одном иллюстративном примере точка вращения может располагаться по центру относительно конструктивных элементов на плоскости.
Затем проводятся первые линии на плоскости, проходящие из точки вращения в плоскости в центры конструктивных элементов, расположенных по конкретной схеме (операция 1504). Далее процесс предусматривает построение вторых линий на плоскости, проходящих из центров конструктивных элементов по существу перпендикулярно соответствующим первым линиям (операция 1506). Вторые линии имеют длину, пропорциональную длине первых линий. Коэффициент пропорциональности, используемый для каждой первой линии из числа первых линий, одинаков.
Таким образом, вторые линии могут иметь различную длину в зависимости от длины первых линий. Другими словами, вторые линии имеют длину, пропорциональную длине соответствующих первых линий.
В этих иллюстративных примерах длины первых линий могут быть выбраны на основе ясности иллюстрации. При увеличении коэффициента пропорциональности цилиндры оказываются наклоненными и более четко разделенными на рисунке. При меньшем коэффициенте пропорциональности изображения могут не выглядеть столь ясно для оператора. Другими словами, степень наклона может быть недостаточно выражена при меньшем коэффициенте пропорциональности, и, следовательно, изображение пересечения областей может оказаться скученным и непонятным для оператора.
Затем процесс предусматривает построение третьих линий, проходящих от концов вторых линий, причем третьи линии по существу перпендикулярны плоскости (операция 1508). В этом иллюстративном примере все третьи линии имеют одинаковую длину. Все третьи линии имеют одинаковую длину, чтобы полностью смоделировать возможное пересечение по длине продолговатых областей. Другими словами, цилиндры могут быть достаточно высокими, чтобы можно было хорошо видеть место, где цилиндры пересекаются друг с другом. Эта выбранная длина задает масштаб для преобразования вертикальной координаты в угол поворота.
Далее процесс предусматривает построение продолговатых областей, простирающихся от центров конструктивных элементов до концов третьих линий (операция 1510). Форма продолговатых областей зависит от формы элемента. Например, если элемент является круглым отверстием, продолговатая область представляет собой цилиндр. Если элемент имеет прямоугольную форму, продолговатая область может представлять собой прямоугольный параллелепипед. Другими словами, каждая продолговатая область имеет поперечное сечение, соответствующее форме элемента.
Затем процесс предусматривает смещение продолговатых областей таким образом, что центры конструктивных элементов, через которые проходят продолговатые области, совпадут (операция 1512). Затем процесс предполагает определение пересечения продолговатых областей (операция 1514). Пересечение является областью, на основании которой может быть определено возможное смещение детали, содержащей конструктивные элементы.
Затем процесс предполагает определение возможного смещения детали, содержащей конструктивные элементы, посредством пересечения (операция 1516), после чего процесс завершается. Это возможное смещение может быть возможным смещением детали, содержащей конструктивные элементы, относительно другой детали, имеющей конструктивные элементы, где параметры конструктивного элемента имеют заданные значения. Другими словами, эта операция может использоваться для определения величины возможного смещения первой детали, у которой конструктивные элементы имеют набор значений набора параметров, относительно второй детали, у которой конструктивные элементы имеют набор заданных значений набора параметров, используя пересечение.
Операция 1516 может выполняться путем моделирования детали, имеющей конструктивные элементы, относительно другой детали, имеющей конструктивные элементы, посредством пересечения. В этих иллюстративных примерах размер пересечения может указывать на то, насколько легкой будет сборка деталей с элементами.
Блок-схемы и схемы последовательности операций в различных изображенных вариантах осуществления иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов реализации устройств и способов в иллюстративном варианте осуществления. В этом отношении каждый блок в блок-схемах может представлять собой модуль, сегмент, функцию и/или часть операции или этапа. Например, один или несколько блоков могут быть реализованы в виде программного кода, аппаратных средств или сочетания программного кода и аппаратного обеспечения. При реализации в виде аппаратных средств аппаратные средства могут, например, иметь форму интегральных схем, изготовленных или сконфигурированных для выполнения одной или нескольких операций, указанных на блок-схемах.
В некоторых альтернативных реализациях иллюстративного варианта осуществления функция или функции, указанные в блоках могут осуществляться не в порядке, указанном на чертежах. Например, в некоторых случаях два блока, показанные последовательно, могут быть выполнены по существу одновременно или иногда в обратном порядке, в зависимости от присущей им функциональности. Кроме того, и другие блоки могут быть добавлены к изображенной схеме последовательности операций или блок-схеме.
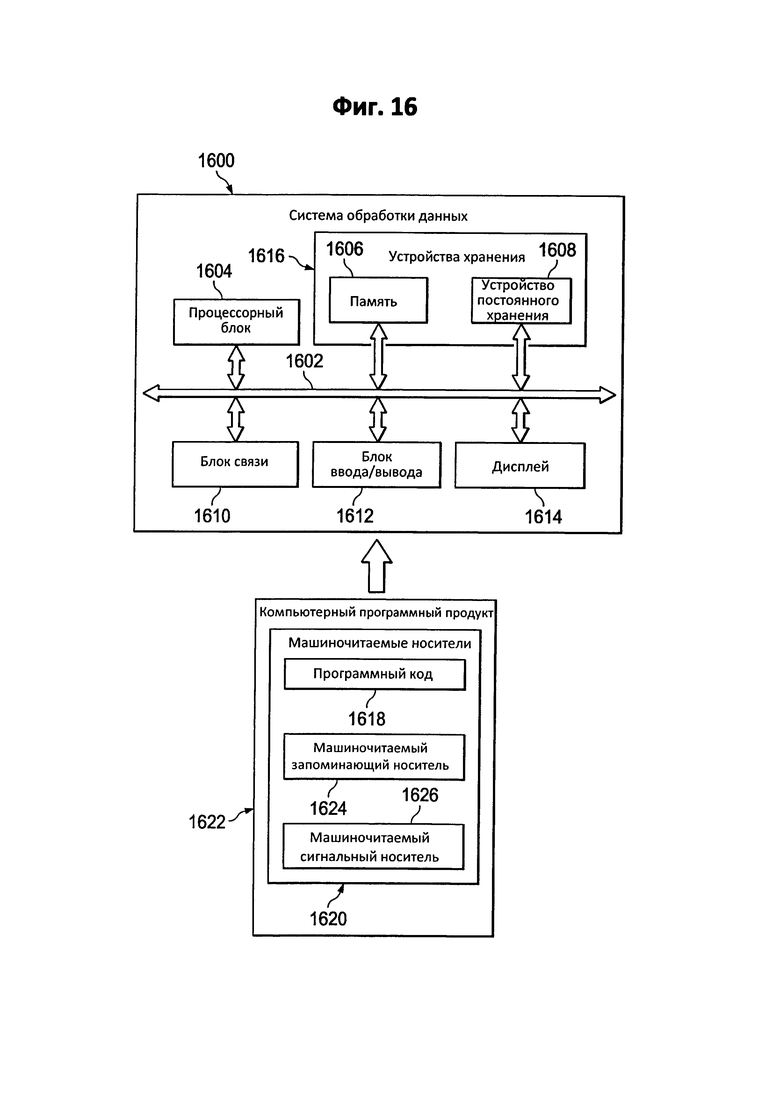
На фиг.16 изображена система обработки данных в соответствии с иллюстративным вариантом осуществления изобретения. Система 1600 обработки данных может быть применена для реализации анализатора 110 и компьютерной системы 112 на фиг.1. В этом иллюстративном примере система 1600 обработки данных включает в себя средства 1602 связи, обеспечивающие связь между процессорным блоком 1604, памятью 1606, долговременным хранилищем 1608 данных, блоком 1610 связи, блоком 1612 ввода/вывода и дисплеем 1614. В этих примерах средства 1602 связи могут представлять собой систему шин.
Процессорный блок 1604 служит для исполнения команд программного обеспечения, которое может быть загружено в память 1606. Процессорный блок 1604 может представлять собой набор процессоров, многоядерный процессор или иной тип процессора, в зависимости от конкретной реализации. Термин «набор», употребляемый здесь по отношению к устройству, означает один или несколько устройств. Кроме того, процессорный блок 1604 может быть реализован с использованием набора гетерогенных процессорных систем, в которых главный процессор и вторичные процессоры находятся на одном чипе. В другом иллюстративном примере процессорный блок 1604 может быть симметричной многопроцессорной системой, включающей несколько процессоров одного типа.
Память 1606 и долговременное хранилище 1608 данных являются примерами запоминающих устройств 1616. Запоминающее устройство представляет собой любое аппаратное средство, способное хранить информацию, такую как (в качестве примера, а не ограничения) данные, программный код в виде функций и/или другая соответствующая информация на временной и/или постоянной основе. В приведенных примерах запоминающие устройства 1616 также могут именоваться как машиночитаемые запоминающие устройства. В этих примерах память 1606 может быть, например, оперативной памятью или другим подходящим энергозависимым или энергонезависимым запоминающим устройством. Долговременное хранилище 1608 данных может иметь различные формы в зависимости от конкретной реализации.
Например, долговременное хранилище 1608 данных может содержать один или несколько компонентов или устройств. Например, долговременное хранилище 1608 данных может быть жестким диском, флэш-памятью, перезаписываемым оптическим диском, перезаписываемой магнитной лентой или сочетанием перечисленных выше устройств. Носители, используемые в долговременном хранилище 1608 данных, также могут быть съемными. Например, съемный жесткий диск может использоваться в качестве долговременного хранилища 1608 данных.
В этих примерах блок 1610 связи обеспечивает связь с другими системами обработки данных или устройствами. В этих примерах блок 1610 связи является сетевой интерфейсной платой. Блок 1610 связи может обеспечивать связь с использованием физических и/или беспроводных линий связи.
Блок 1612 ввода/вывода обеспечивает ввод и вывод данных из других устройств, которые могут быть подключены к системе 1600 обработки данных. Например, блок 1612 ввода/вывода может обеспечить соединение для ввода данных пользователем через клавиатуру, мышь и/или другое подходящее устройство ввода. Кроме того, блок 1612 ввода/вывода может выводить данные на принтер. Дисплей 1614 обеспечивает пользователю средства отображения информации.
Команды для операционной системы, приложений и/или программ могут находиться в запоминающих устройствах 1616, связанных с процессорным блоком 1604 с помощью средств 1602 связи. В этих иллюстративных примерах команды в виде функций находятся в долговременном хранилище 1608 данных. Эти команды могут быть загружены в память 1606 для исполнения процессорным блоком 1604. Процессы согласно различным вариантам осуществления могут выполняться процессорным блоком 1604 с использованием компьютерных команд, которые могут находиться в памяти, например, памяти 1606.
Эти команды называются программным кодом, машиноиспользуемым программным кодом или машиночитаемым программным кодом, который может считываться и выполняться процессором в процессорном блоке 1604. Программный код в различных вариантах осуществления может находиться на различных физических или машиночитаемых запоминающих носителях, таких как память 1606 или долговременное хранилище 1608 данных.
Программный код 1618 в виде функций находится на машиночитаемом носителе 1620, который может быть извлечен и загружен или перенесен в систему 1600 обработки данных для исполнения процессорным блоком 1604. В этих примерах программный код 1618 и машиночитаемый носитель 1620 образуют компьютерный программный продукт 1622. В одном примере машиночитаемый носитель 1620 может быть машиночитаемым запоминающим носителем 1624 или машиночитаемым сигнальным носителем 1626. Машиночитаемый запоминающий носитель 1624 может включать, например, оптический или магнитный диск, установленный или помещенный в дисковод или иное устройство, являющееся частью долговременного хранилища 1608 данных, для переноса на запоминающее устройство, такое как жесткий диск, который является частью долговременного хранилища 1608 данных. Машиночитаемый запоминающий носитель 1624 также может быть в виде долговременного хранилища данных, такого как жесткий диск, флэш-накопитель или флэш-память, соединенные с системой 1600 обработки данных. В некоторых случаях машиночитаемый запоминающий носитель 1624 может быть выполнен без возможности извлечения из системы 1600 обработки данных. В этих примерах машиночитаемый носитель данных 1624 является физическим или материальным устройством хранения, используемым для хранения программного кода 1618, а не носителем, который служит для распространения или передачи программного кода 1618. Машиночитаемый запоминающий носитель 1624 также упоминается как машиночитаемое материальное устройство хранения или машиночитаемое физическое устройство хранения. Другими словами, машиночитаемый носитель данных 1624 - это осязаемый носитель.
Альтернативно, программный код 1618 может передаваться в систему 1600 обработки данных посредством машиночитаемого сигнального носителя 1626. Машиночитаемый сигнальный носитель 1626 может представлять собой, например, распространяемый информационный сигнал, содержащий программный код 1618. Например, машиночитаемый сигнальный носитель 1626 может быть электромагнитным сигналом, оптическим сигналом и/или другим подходящим типом сигнала. Эти сигналы могут передаваться по линиям связи, таким как беспроводные линии связи, волоконно-оптический кабель, коаксиальный кабель, провода и/или другая подходящая линия связи. Другими словами, в иллюстративных примерах линия связи и/или соединение могут быть физическими или беспроводными.
В некоторых иллюстративных вариантах осуществления программный код 1618 может загружаться через сеть в долговременное хранилище 1608 данных из другого устройства или системы обработки данных посредством машиночитаемого сигнального носителя 1626 для применения в системе 1600 обработки данных. Например, программный код, который хранится на машиночитаемом запоминающем носителе в серверной системе обработки данных, может быть загружен по сети с сервера в систему 1600 обработки данных. Система обработки данных, предоставляющая программный код 1618, может быть серверным компьютером, клиентским компьютером или иным устройством, способным хранить и передавать программный код 1618.
Различные компоненты, указанные на иллюстрации системы 1600 обработки данных, не предназначены для того, чтобы налагать архитектурные ограничения на реализацию различных вариантов осуществления. Различные иллюстративные варианты осуществления могут быть реализованы в системе обработки данных, в т.ч. в компонентах, добавляемых к указанным на иллюстрации системе 1600 обработки данных или вместо них. Другие компоненты, изображенные на фиг.16, могут отличаться от приведенных иллюстративных примеров. Различные варианты осуществления могут быть реализованы с использованием аппаратных средств или системы, способной работать с программным кодом. В качестве одного из примеров, система обработки данных может включать органические компоненты, интегрированные с неорганическими компонентами, и/или может состоять целиком из органических компонентов, за исключением человека. Например, запоминающее устройство может состоять из органического полупроводника.
В другом иллюстративном примере процессорный блок 1604 может иметь форму аппаратного устройства, содержащего схему, изготовленную или сконфигурированную для конкретного применения. Этот тип аппаратных средств может выполнять операции без необходимости в загрузке программного кода в память из устройства хранения, сконфигурированного для выполнения операций.
Например, если процессорный блок 1604 представлен в виде аппаратного средства, процессорный блок 1604 может быть представлен в виде электронной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или какого-либо другого подходящего типа оборудования, реализованного с возможностью выполнения ряда операций. В случае программируемого логического устройства такое устройство сконфигурировано для выполнения ряда операций. Устройство может быть переконфигурировано позднее или же может быть постоянно сконфигурировано для выполнения ряда операций. Примеры программируемых логических устройств включают, например, программируемую логическую матрицу, программируемую матричную логику, логическую матрицу, программируемую пользователем, программируемую пользователем вентильную матрицу и другие подходящие аппаратные средства. При этом типе реализации программный код 1618 может отсутствовать, поскольку процессы для различных вариантов реализованы в аппаратном блоке.
В еще одном иллюстративном примере процессорный блок 1604 может быть реализован с использованием сочетания процессоров, используемых в компьютерах и электронных устройствах. Процессорный блок 1604 может содержать набор аппаратных блоков и набор процессоров, сконфигурированных для исполнения программного кода 1618. В данном примере некоторые процессы могут быть реализованы в наборе аппаратных средств, в то время как другие процессы могут быть реализованы в наборе процессоров.
В другом примере система шин может быть использована для реализации средств 1602 связи и может состоять из одной или нескольких шин, таких как системная шина или шина ввода/вывода. Конечно, система шин может быть реализована с использованием любого подходящего типа архитектуры, обеспечивающей передачу данных между различными компонентами или устройствами, подключенными к системе шин.
Кроме того, устройство связи может включать в себя ряд устройств, которые передают данные, принимают данные или передают и принимают данные. Устройство связи может представлять собой, например, модем или сетевой адаптер, два сетевых адаптера или какие-либо их сочетания. Кроме того, память может быть, например, памятью 1606, или кэшем, таким какой используется в интерфейсе и контроллере-концентраторе памяти, которые могут присутствовать в средствах 1602 связи.
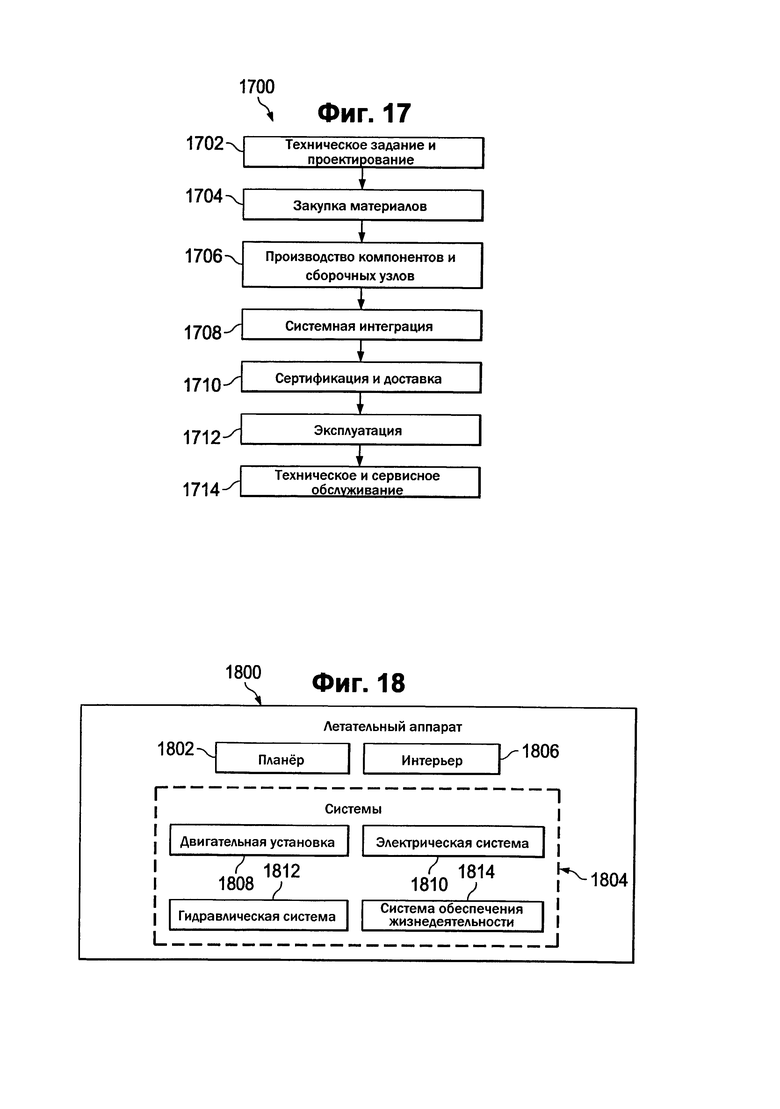
Иллюстративные варианты осуществления изобретения могут быть описаны в контексте способа 1700 изготовления и обслуживания летательных аппаратов, как показано на фиг.17, и летательного аппарата 1800, как показано на фиг.18. На фиг.17, где изображен способ изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом осуществления изобретения. В процессе подготовки к производству способ 1700 изготовления и обслуживания летательного аппарата может включать технические характеристики и проектирование 1702 летательного аппарата 1800 на фиг.18, а также закупку материалов 1704.
В процессе изготовления происходит производство компонентов и сборочных узлов 1706, а также системная интеграция 1708 летательного аппарата 1800, как изображено на фиг.18. После этого летательный аппарат 1800 согласно фиг.18 может проходить сертификацию и доставку 1710 для ввода в эксплуатацию 1712. В процессе эксплуатации 1712 клиентом для летательного аппарата 1800 согласно фиг.18 составляется график регулярного технического и сервисного обслуживания 1714, которое может включать модификацию, реконфигурацию, ремонт и другие работы по техническому и сервисному обслуживанию.
Каждый из процессов способа изготовления и обслуживания летательного аппарата 1700 может выполняться или осуществляться системным интегратором, третьей стороной и/или оператором. В этих примерах оператор может быть клиентом. Для целей данного описания в состав системного интегратора могут входить, без ограничения, любое число производителей самолетов и субподрядчиков основных систем; третья сторона может включать в себя, без ограничения, любое число продавцов, субподрядчиков и поставщиков; оператором может быть авиакомпания, лизинговая компания, военное подразделение, сервисная организация и т.д.
Теперь рассмотрим фиг.18, где изображен летательный аппарат в иллюстративном варианте осуществления. В этом примере летательный аппарат 1800 производится способом изготовления и обслуживания летательного аппарата 1700 согласно фиг.17 и может включать планер 1802 летательного аппарата с множеством систем 1804 и интерьер 1806. Примеры систем 1804 включают одну или несколько двигательных установок 1808, электрических систем 1810, гидравлических систем 1812 и систем 1814 жизнедеятельности. В их состав может также входить любое количество других систем. Хотя приведен пример аэрокосмического летательного аппарата, различные иллюстративные варианты осуществления изобретения могут быть применены в других отраслях, например, в автомобильной промышленности.
Устройства и способы, предусмотренные изобретением, могут использоваться по меньшей мере на одном из этапов способа 1700 изготовления и обслуживания летательного аппарата согласно фиг.17. Иллюстративные варианты осуществления могут быть реализованы в процессе определения технического задания и проектирования 1702, чтобы смоделировать возможное смещение деталей друг относительно друга в трех измерениях при использовании схем расположения конструктивных элементов. Моделирование может использоваться для того, чтобы изменить проект схемы расположения конструктивных элементов. Кроме того, моделирование может использоваться для составления инструкций по сборке деталей. Также такое моделирование может использоваться для определения инструментов, необходимых для сборки деталей.
Путем выполнения различного моделирования можно определить, насколько значения параметров могут отличаться от заданных значений параметров. Например, отклонение может быть выбрано для обеспечения большей простоты сборки деталей. Например, обеспечивая значения, более близкие к заданным значениям, можно снизить трудоемкость и количество инструментов, необходимых для сборки деталей.
Кроме того, один или несколько иллюстративных вариантов осуществления могут использоваться в процессе производства компонентов и сборочных узлов 1706 для определения величины возможного смещения деталей друг относительно друга, исходя из значений, относящихся к элементам изготовленных деталей. Иллюстративный вариант осуществления также может быть реализован в процессе технического и сервисного обслуживания 1714 для определения особенностей проектирования и изготовления конструктивных элементов и новых деталей. Эти различные иллюстративные варианты осуществления могут быть реализованы в ходе технического обслуживания, проверок, ремонта и модернизации летательного аппарата 1800. Использование ряда различных иллюстративных вариантов осуществления может существенно ускорить сборку и/или снизить себестоимость летательного аппарата 1800.
Таким образом, с помощью иллюстративного варианта осуществления может быть снижена сложность процессов сборки деталей. Иллюстративный вариант осуществления может позволить снизить сложность, трудоемкость и стоимость сборки деталей такого изделия, как летательный аппарат. Предоставленная информация о возможном смещении деталей может использоваться для снижения сложности сборки деталей и уменьшения стоимости изготовления сложного изделия, такого как летательный аппарат, в ходе производства которого осуществляется сборка десятков или даже сотен тысяч деталей.
Кроме того, с помощью иллюстративного варианта осуществления можно уменьшить количество необходимого для сборки деталей инструмента. Сокращение количества инструментов позволяет снизить расходы путем исключения расходов, связанных с приобретением и техническим обслуживанием этих инструментов.
Описание различных иллюстративных вариантов осуществления было представлено в целях иллюстрации и описания и не предназначено быть исчерпывающим или ограниченным изложенными вариантами осуществления. Многие модификации и вариации будут очевидны специалистам в данной области.
Хотя представленные примеры иллюстративного варианта осуществления описаны применительно к летательному аппарату, иллюстративный вариант осуществления может быть применен к другим типам платформ. Платформа может представлять собой, в качестве примера, а не ограничения, мобильную платформу, стационарную платформу, наземную структуру, водную структуру и космическую конструкцию. В частности, платформа может представлять собой надводный корабль, танк, автомобиль для перевозки личного состава, поезд, космический корабль, космическую станцию, спутник, подводную лодку, автомобиль, электростанцию, мост, плотину, дом, производственные мощности, здания и другие подходящие платформы.
Кроме того, различные иллюстративные варианты осуществления могут обеспечивать различные характеристики по сравнению с другими иллюстративными вариантами осуществления. Вариант(ы) осуществления выбраны и описаны для наилучшего объяснения принципов вариантов осуществления, практического применения и предоставления возможности другим специалистам в данной области техники понять раскрытые варианты осуществления с различными модификациями, которые подходят для конкретного предполагаемого использования.
Изобретение относится к производству деталей. Техническим результатом является повышение точности, а также упрощение сборки деталей. Способ и устройство для определения возможного смещения детали, содержащей конструктивные элементы. Первые линии строятся компьютерной системой на плоскости как линии, проходящие из точки вращения в плоскости в центры конструктивных элементов, принадлежащих схеме расположения конструктивных элементов. Вторые линии строятся компьютерной системой на плоскости и проходят из центров конструктивных элементов, причем вторые линии по существу перпендикулярны соответствующим первым линиям. Третьи линии строятся компьютерной системой и проходят от концов вторых линий, причем третьи линии по существу перпендикулярны плоскости. Компьютерная система строит продолговатые области, простирающиеся от центров конструктивных элементов до концов третьих линий. Компьютерная система строит пересечение продолговатых областей. Возможное смещение детали, содержащей конструктивные элементы, определяется посредством указанного пересечения. 2 н. и 15 з.п. ф-лы, 18 ил.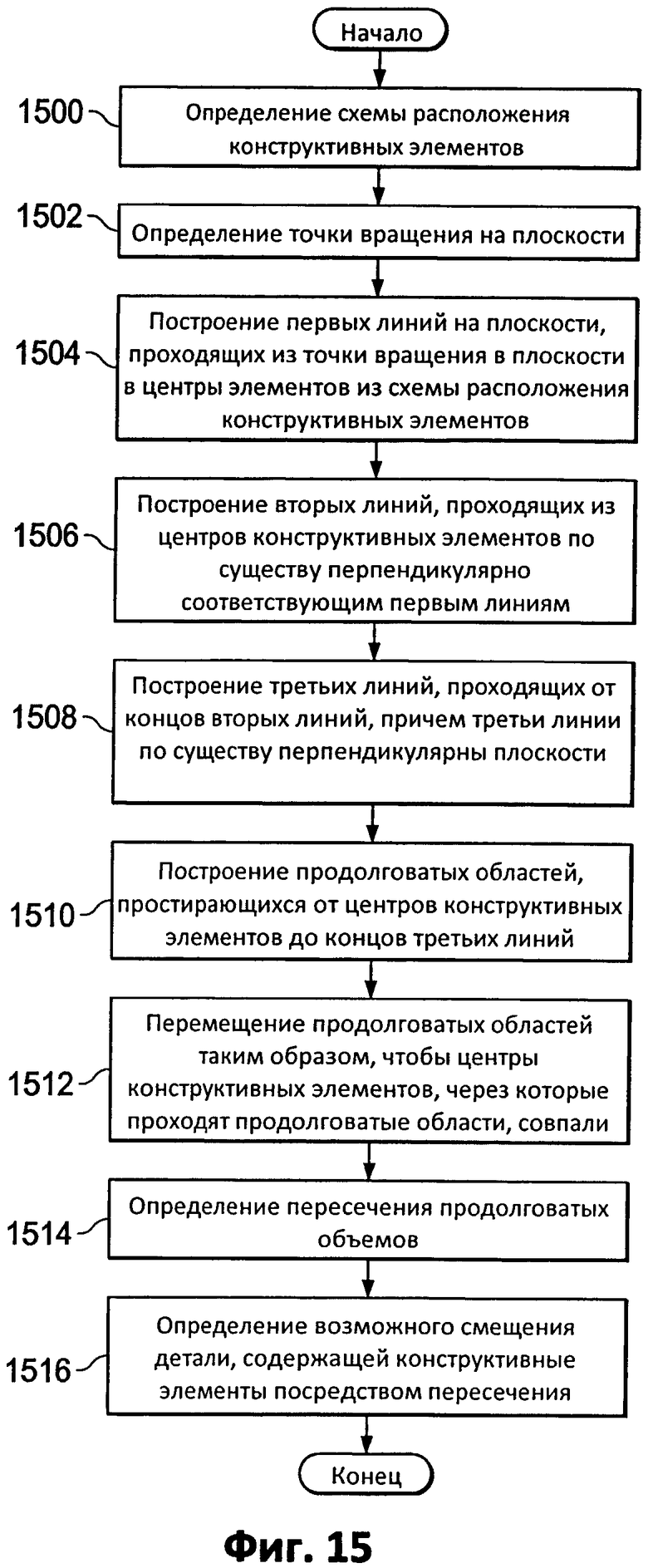
1. Способ определения возможного смещения (113) детали (108), содержащей конструктивные элементы (102), включающий следующие этапы:
построение компьютерной системой (112) первых линий (118) на плоскости (116), проходящих из точки вращения (114) в плоскости (116) в центры (120) конструктивных элементов (102) в схеме (104) расположения конструктивных элементов, причем указанные первые линии (118) проходят из точки вращения (114) в указанные центры (120) конструктивных элементов (102);
построение компьютерной системой (112) вторых линий (122) на плоскости (116), которые проходят из центров (120) конструктивных элементов (102), причем вторые линии (122) по существу перпендикулярны соответствующим первым линиям (118), и имеют длины, пропорциональные соответствующим длинам первых линий (118);
построение компьютерной системой (112) третьих линий (124), проходящих от концов (126) вторых линий (122), причем третьи линии (124) по существу перпендикулярны плоскости (116), а каждая третья линия имеет конец, противоположный концу второй линии, и одинаковую длину, которая определяет масштаб для построения продолговатых областей, при этом длина выбрана для установки масштаба для преобразования вертикальной координаты в угол поворота;
построение компьютерной системой (112) продолговатых областей (130) пространства, проходящих из центров (120) конструктивных элементов (102) к концам (127) третьих линий (124);
выполнение перемещения компьютерной системой продолговатых областей таким образом, чтобы центры, из которых эти продолговатые области проходят, имели общий центр;
определение компьютерной системой (112) пересечения (134) продолговатых областей (130) в трех измерениях; и
определение посредством пересечения (134) возможного смещения
(113) детали (108), которое включает в себя по меньшей мере одно из перемещения и вращения в трех измерениях, причем точка на пересечении продолговатых областей обеспечивает вращение и перемещение детали;
выполнение моделирования величины возможного смещения детали относительно другой детали в сборке деталей для производства самолета, тем самым анализируя сборку деталей с другой деталью.
2. Способ по п. 1, дополнительно включающий определение точки (114) вращения для конструктивных элементов (102) на плоскости (116).
3. Способ по п. 1, в котором деталь (108) является первой деталью и в котором определение возможного смещения (113) детали (108), содержащей конструктивные элементы (102), с помощью пересечения (134), включает:
определение величины возможного смещения (113) первой детали, у которой конструктивные элементы (102) имеют набор значений (138), соответствующих набору параметров (137), относительно второй детали, у которой конструктивные элементы (102) имеют набор заданных значений (138), соответствующих набору параметров (137), используя пересечение (134).
4. Способ по п. 1, в котором размер пересечения (134) указывает на легкость сборки деталей (140), содержащих конструктивные элементы (102).
5. Способ по п. 1, в котором вторые линии имеют длину, пропорциональную соответствующим первым линиям.
6. Способ по п. 1, в котором третьи линии имеют одинаковую длину.
7. Способ по п. 1, в котором каждая продолговатая область пространства из продолговатых областей (130) имеет поперечное сечение, соответствующее форме элемента (102).
8. Способ по п. 1, в котором конструктивные элементы (102) являются отверстиями, а продолговатые области (130) - цилиндрами.
9. Способ по п. 1, в котором конструктивные элементы (102) имеют набор размеров.
10. Способ по п. 1, в котором плоскость (116) задает поверхность конструкции, в которой расположены конструктивные элементы (102) из схемы (104) расположения конструктивных элементов.
11. Способ по п. 1, в котором конструктивный элемент из числа конструктивных элементов (102) выбирают из следующих элементов: отверстие, отверстие с прорезью, прямоугольная щель.
12. Система (100) анализа конструктивных элементов, содержащая анализатор (110) в компьютерной системе (112), в которой анализатор (110) выполнен с возможностью:
построения первых линий (118) на плоскости (116) от точки вращения (114) на плоскости (116) до центров (120) конструктивных элементов (102), принадлежащих схеме (104) расположения конструктивных элементов, причем указанные первые линии (118) проходят из точки вращения (114) в указанные центры (120) конструктивных элементов (102);
построения вторых линий (122) на плоскости (116), тянущихся от центров (120) конструктивных элементов (102), по существу перпендикулярно к соответствующим первым линиям (118), причем вторые линии имеют длину, пропорциональную соответствующим первым линиям;
построения третьих линий (124) по существу перпендикулярно плоскости (116) из концов (127) вторых линий (122), причем каждая третья линия имеет конец, противоположный концу второй линии, и одинаковую длину, которая определяет масштаб для построения продолговатых областей, при этом длина выбрана для установки масштаба для преобразования вертикальной координаты в угол поворота;
построения продолговатых областей (130) пространства, проходящих из центров (120) конструктивных элементов (102) до концов (127) третьих линий (124);
выполнения перемещения продолговатых областей таким образом, чтобы центры, из которых эти продолговатые области проходят, имели общий центр;
определения пересечения (134) продолговатых областей (130) в трех измерениях;
определения посредством пересечения возможного смещения (113) детали (108), которое включает в себя по меньшей мере одно из перемещения и вращения в трех измерениях, причем точка на пересечении продолговатых областей обеспечивает вращение и перемещение детали;
выполнения моделирования величины возможного смещения детали относительно другой детали в сборке деталей для производства самолета, тем самым анализируя сборку деталей с другой деталью.
13. Система анализа конструктивных элементов по п. 12, в которой анализатор выполнен с возможностью определения точки вращения (114) конструктивных элементов (102) на плоскости (116).
14. Система (100) анализа конструктивных элементов по п. 12, в которой деталь (108) является первой деталью и в которой сконфигурированный для определения возможного смещения (113) детали с конструктивными элементами (102), посредством пересечения (134), анализатор (110) выполнен с возможностью определения величины возможного смещения (113) первой детали, у которой конструктивные элементы (102) имеют набор значений (138), соответствующих набору параметров (137), относительно второй детали, у которой конструктивные элементы (102) имеют набор заданных значений (138), соответствующих набору параметров (137), посредством пересечения (134).
15. Система (100) анализа конструктивных элементов по п. 12, в которой сконфигурированный для определения возможного смещения (113) детали (108), содержащей конструктивные элементы (102), посредством пересечения (134), анализатор (110) выполнен с возможностью моделирования (139) детали, содержащей конструктивные элементы (102), относительно другой детали, содержащей конструктивные элементы (102), посредством пересечения (134).
16. Система (100) анализа конструктивных элементов по п. 12, в которой размер пересечения (134) указывает на легкость сборки деталей (140) с конструктивными элементами (102).
17. Система (100) анализа конструктивных элементов по п. 12, в которой вторые линии (122) имеют значения длины (125), пропорциональные соответствующим значениям первых линий (118).
| US 20120078591 A1, 29.03.2012 | |||
| US 20060106476 A1, 18.05.2006 | |||
| US 20020118229 A1, 29.08.2002 | |||
| СПОСОБ МОДЕЛИРОВАНИЯ В КОМПЬЮТЕРНЫХ СИСТЕМАХ ТРЕХМЕРНОГО ПРОЕКТИРОВАНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2263966C1 |

