Изобретения относятся к области компьютерного проектирования и могут быть использованы при проектировании многокомпонентных изделий с помощью компьютерных систем трехмерного моделирования.
Известен способ объемного моделирования (1), основанный на представлении упрощенных объемных моделей для компоновки элементов объектов. Объемные компоновочные модели используются на стадиях проектирования в виде весовых (габариты, формы, массы и координаты центра тяжести макета соответствующего изделия), тепловых и художественно-конструкторских макетов.
Недостатками этого способа объемного моделирования является сложность воспроизведения инерционных характеристик изделия.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ моделирования в компьютерных системах трехмерного проектирования (компьютер с программным обеспечением трехмерного проектирования), включающий операции по созданию компьютерной трехмерной модели объекта, определению массово-центровочных и инерционных характеристик модели объекта (2), суть которого заключается в создании компьютерной трехмерной модели каждой детали с требуемой геометрией и плотностью материала. Полная компьютерная трехмерная модель компонуемого объекта представляет собой совокупность компьютерных трехмерных моделей деталей и сборочных единиц, также состоящих из компьютерных трехмерных моделей деталей. Функциональные возможности компьютерных систем трехмерного проектирования позволяют определять массу, положение центра масс, осевые и центробежные моменты инерции (массово-центровочные и инерционные характеристики объекта) по геометрии и плотности материала детали.
Недостатком этого способа моделирования в компьютерных системах трехмерного проектирования является низкая производительность работы компьютерной системы (вплоть до неприемлемого для пользователя уровня) из-за сложности компьютерной трехмерной модели компонуемого изделия, содержащей большое число сборочных единиц с компьютерными трехмерными моделями внутреннего состава.
Техническая задача, решаемая с помощью предлагаемого способа моделирования в компьютерных системах трехмерного проектирования, заключается в создании более простого и точного способа моделирования массово-центровочных и инерционных характеристик изделия, состоящего из большого числа сборочных единиц.
Технический результат:
- возможность использования менее производительной вычислительной техники;
- расширение функциональных возможностей моделирования в компьютерных системах трехмерного проектирования, заключающееся в обеспечении возможности создания компьютерной трехмерной модели объекта, внутреннее содержание которого недоступно для пользователя (по причине государственной тайны, ноу-хау разработчика и другим причинам);
- повышение производительности выполнения работ.
Поставленная задача по первому варианту решается тем, что в способе моделирования в компьютерных системах трехмерного проектирования, включающем операции по созданию компьютерной трехмерной модели объекта, определению массово-центровочных и инерционных характеристик модели объекта, в отличие от прототипа, компьютерную трехмерную модель объекта создают в виде массово-инерционного имитатора, который представляет собой имитатор массы и главных центральных моментов инерции, состоящий из трехмерных моделей шести одинаковых шаров. Суммарная масса шаров равна массе объекта. Центры шаров располагают попарно вдоль координатных осей симметрично относительно начала системы координат на расстояниях, определяемых из условия обеспечения идентичности значений главных центральных моментов инерции соответствующим значениям модели объекта. Затем начало системы координат имитатора массы и главных центральных моментов инерции размещают в точке, соответствующей положению центра масс объекта, а оси совмещают с соответствующими направлениями главных центральных осей модели объекта.
Поставленная задача по второму варианту решается тем, что в способе моделирования в компьютерных системах трехмерного проектирования, включающем операции по созданию компьютерной трехмерной модели объекта, определению массово-центровочных и инерционных характеристик модели объекта, в отличие от прототипа, модель объекта создают в виде компоновочного имитатора, который представляет собой сборочный узел, получаемый совмещением габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала и заданной точкой, соответствующей положению центра масс объекта, и имитатора массы и главных центральных моментов инерции, состоящего из трехмерных моделей шести одинаковых шаров. Суммарная масса шаров равна массе объекта. Центры шаров располагают попарно вдоль координатных осей симметрично относительно начала системы координат на расстояниях, определяемых из условия обеспечения идентичности значений главных центральных моментов инерции соответствующим значениям модели объекта. Затем начало системы координат имитатора массы и главных центральных моментов инерции размещают в заданной точке габаритного имитатора, соответствующей положению центра масс модели объекта, а оси совмещают с соответствующими направлениями главных центральных осей модели объекта.
Поставленная задача по третьему варианту решается тем, что в способе моделирования в компьютерных системах трехмерного проектирования, включающем операции по созданию компьютерной трехмерной модели объекта, определению массово-центровочных и инерционных характеристик модели объекта, в отличие от прототипа, модель объекта создают в виде компоновочного имитатора, который представляет собой сборочный узел, состоящий из габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала, в котором размещают трехмерные модели шести одинаковых шаров, суммарная масса которых равна массе объекта. Центры шаров располагают из условия обеспечения значений моментов инерции соответствующим значениям модели объекта.
Создание модели объекта по первому варианту в виде массово-инерционного имитатора, который представляет собой имитатор массы и главных центральных моментов инерции, состоящий из трехмерных моделей шести одинаковых шаров, суммарная масса шаров равна массе объекта, центры шаров расположены попарно вдоль координатных осей симметрично относительно начала системы координат на расстояниях, определяемых из условия обеспечения идентичности значений главных центральных моментов инерции соответствующим значениям модели объекта, позволяет значительно упростить модель объекта за счет замены ее шестью одинаковыми шарами и простого расчета инерционных характеристик шаров и обеспечения идентичности значений главных центральных моментов инерции соответствующим значениям модели объекта.
Размещение начала системы координат имитатора массы и главных центральных моментов инерции в точке, соответствующей положению центра масс объекта и совмещение осей с соответствующими направлениями главных центральных осей модели объекта позволяет создать массово-инерционный имитатор, который обеспечивает определение массово-центровочных и инерционных характеристик изделия, состоящего из большого числа сборочных единиц с использованием менее производительной вычислительной техники (за счет замены многокомпонентного изделия простым массово-инерционным имитатором) и, следовательно, повысить производительность выполнения работ.
Создание модели объекта по второму варианту в виде компоновочного имитатора, который представляет собой сборочный узел, получаемый совмещением габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала и заданной точкой, соответствующей положению центра масс объекта, и массово-инерционного имитатора, который представляет собой имитатор массы и главных центральных моментов инерции, размещение начала системы координат имитатора массы и главных центральных моментов инерции в заданной точке габаритного имитатора, соответствующей положению центра масс модели объекта, и совмещение осей с соответствующими направлениями главных центральных осей модели объекта позволяет определять массово-центровочные и инерционные характеристики, а также производить компоновочные работы изделия, состоящего из большого числа сборочных единиц с использованием менее производительной вычислительной техники (за счет замены многокомпонентного изделия простым компоновочным имитатором) и, следовательно, повысить производительность выполнения работ.
Создание модели объекта по третьему варианту в виде компоновочного имитатора, который представляет собой сборочный узел, состоящий из габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала, в котором размещены трехмерные модели шести одинаковых шаров, суммарная масса которых равна массе объекта и расположение центров шаров из условия обеспечения идентичности значений моментов инерции соответствующим значениям модели объекта позволяет определять массово-центровочные и инерционные характеристики, а также производить компоновочные работы изделия, состоящего из большого числа сборочных единиц с использованием менее производительной вычислительной техники, а также повысить производительность выполнения работ за счет простого создания компоновочного имитатора.
В первом и втором вариантах наличие массово-инерционного имитатора, а в третьем варианте наличие трехмерных моделей шести одинаковых шаров, суммарная масса которых равна массе объекта, а центры шаров расположены из условия обеспечения идентичности значений моментов инерции соответствующим значениям модели объекта, позволяет с высокой точностью определять массово-центровочные и инерционные характеристики.
Во втором и третьем вариантах наличие в компоновочном имитаторе габаритного имитатора позволяет с большим быстродействием в упрощенном виде производить компоновочные работы для многокомпонентных изделий.
В третьем варианте размещение центров шаров из условия обеспечения идентичности значений моментов инерции соответствующим значениям модели объекта позволяет упростить создание модели, а следовательно, повысить производительность выполнения работ.
Сущность изобретений поясняется чертежами, где
на фиг.1 представлен имитатор массы и главных центральных моментов инерции;
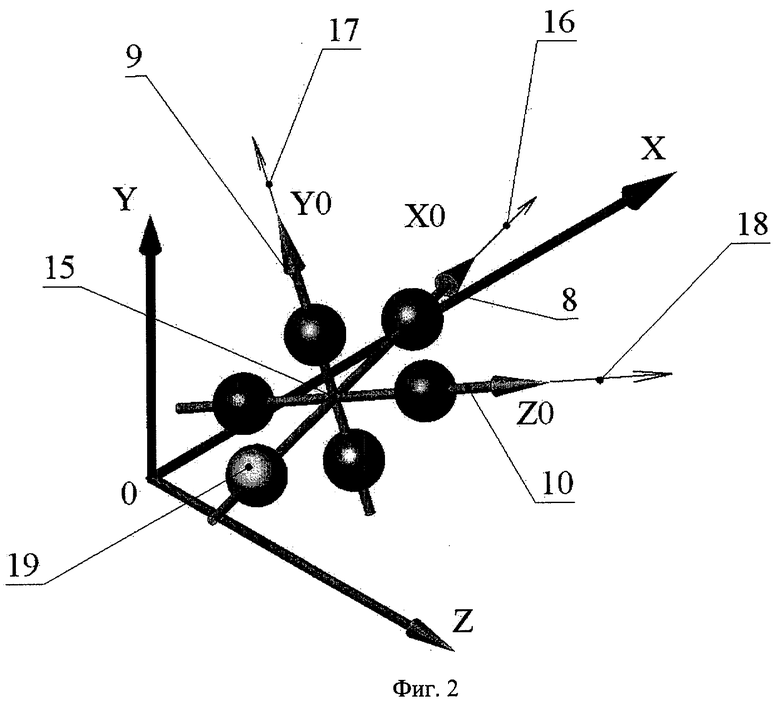
на фиг.2 - массово-инерционный имитатор;
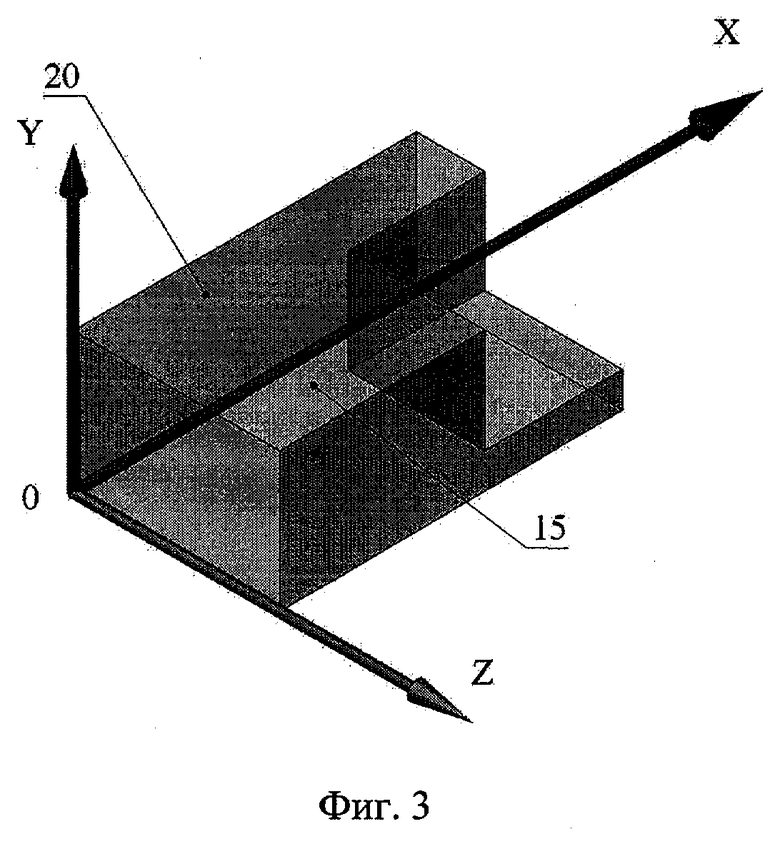
на фиг.3 - габаритный имитатор;
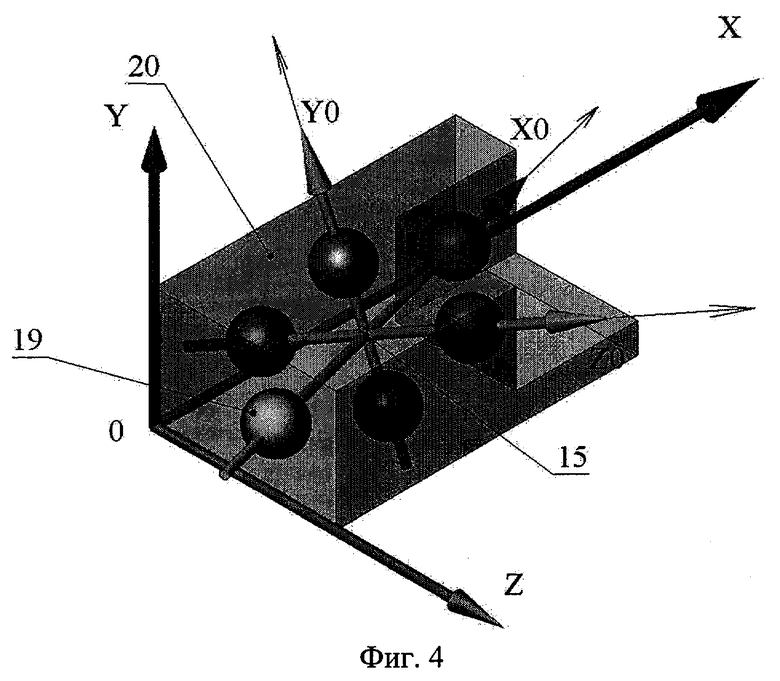
на фиг.4 - компоновочный имитатор, получаемый совмещением габаритного имитатора модели и имитатора массы, и главных центральных моментов инерции;
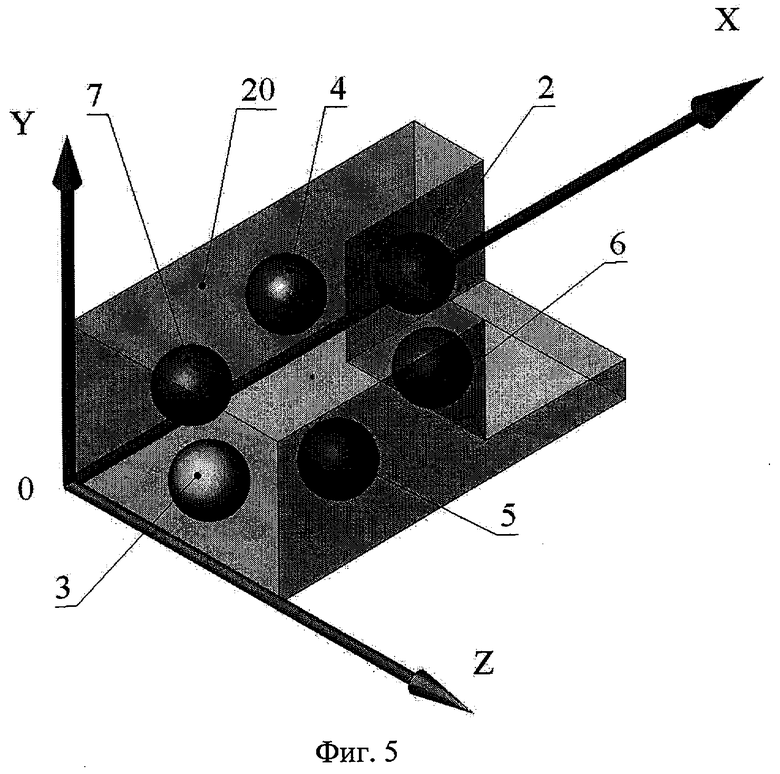
на фиг.5 - компоновочный имитатор, состоящий из габаритного имитатора модели и трехмерных моделей шести одинаковых шаров.
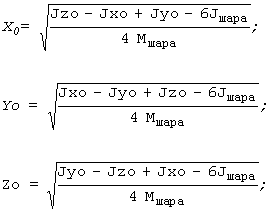
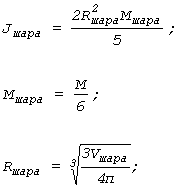
В первом варианте осуществления способа моделирования в компьютерных системах трехмерного проектирования (компьютер с программным обеспечением трехмерного проектирования, например Компас-3D, SolidEdge, SolidWorks, Inventor, Unigraphics, Pro/Engineer, CATIA) на основе полученных для объекта исходных данных (массы - М; координат центра массы - Хц.м., Уц.м., Zц.м.; главных центральных моментов инерции - Jxo, jyo, jzo, направления главных центральных осей инерции (направляющие косинусы) - cosα1, cosβ1, cosγ1, cosα2, cosβ2, cosγ2, cosα3, cosβ3, cosγ3) создается компьютерная трехмерная модель объекта в виде имитатора массы и главных центральных моментов инерции 1, который состоит из трехмерных моделей шести одинаковых шаров 2, 3, 4, 5, 6, 7, суммарная масса которых равна массе объекта. Для чего создается модель шара 2 (3, 4, 5, 6, 7) в виде детали с рассчитанным радиусом Rшара по формуле
где  ,
,

ρ - плотность материала шара.
Центры шаров 2, 3, 4, 5, 6, 7 располагают попарно вдоль координатных осей 8, 9, 10 симметрично относительно начала системы координат 11 на расстояниях 12, 13, 14, определяемых из условия обеспечения идентичности главных центральных моментов инерции соответствующим значениям модели объекта. Расстояния 12, 13, 14 рассчитываются по формулам
Х0 - расстояние 12,
Y0 - расстояние 13,
Z0 - расстояние 14.
Затем начало системы координат 11 имитатора массы и главных центральных моментов инерции 1 размещают в точке 15, соответствующей положению центра масс объекта, а оси 8, 9, 10 совмещают с соответствующими направлениями главных центральных осей модели объекта 16, 17, 18 (см. фиг.2), и тем самым создается компьютерная трехмерная модель объекта в виде массово-инерционного имитатора 19. Для угловой фиксации осей 8, 9, 10 имитатора массы и главных центральных моментов инерции 1 рассчитываются в системе координат OXYZ координаты Хх, Yx, Zx, точки (в данном примере точки, совпадающей с центром шара 2), лежащей на оси 8 по формулам
Хх=Х0·cosα1+Хц.м.
Yx=X0·cosβ1+Yц.м.
Zx=X0·cosγ1+Zц.м.,
где Хц.м., Yц.м., Zц.м - координаты точки 15, соответствующей положению центра масс объекта;
Х0 - координата центра шара 2 в системе координат 0X0Y0Z0 (8, 9, 10), равная расстоянию 12;
cosα1, cosβ1, cosγ1 - направляющие косинусы (заданы).
Затем рассчитываются в системе координат OXYZ координаты Хy, Yy, Zy, точки (в данном примере точки, совпадающей с центром шара 4), лежащей на оси 9 по формулам
Хy=Y0·cosα2+Хц.м
Yy=Y0·cosβ2+yц.м
Zy=Y0·cosγ2+Zц.м
где Хц.м., Yц.м., Zц.м. - координаты точки 15, соответствующей положению центра масс объекта;
Y0 - координата центра шара 4 в системе координат 0X0Y0Z0 (8, 9, 10), равная расстоянию 13;
cosα2, cosβ2, cosγ2 - направляющие косинусы (заданы).
Определяют массово-центровочные и инерционные характеристики модели объекта в виде массово-инерционного имитатора.
Применение моделей объектов (приборов, комплектующих сборочных единиц и т.п.) в виде простых массово-инерционных имитаторов при проектировании в компьютерных системах трехмерного моделирования сложного по своему внутреннему составу изделия позволяет решать задачу определения массово-центровочные и инерционные характеристики для всего изделия в целом. При этом модель всего изделия существенно упрощается, что позволяет использовать менее производительную вычислительную технику или проектировать еще более сложные по своему составу изделия с приемлемым для пользователя быстродействием на имеющейся вычислительной технике.
Во втором варианте осуществления способа моделирования в компьютерных системах трехмерного проектирования на основе исходных данных для объекта (например, габаритный чертеж и т.д.) создается габаритный имитатор модели объекта 20, представляющий собой компьютерную трехмерную модель с его наружной геометрией заданной нулевой плотностью материала (приведенный на фиг.3). Задается в нем точка 15, соответствующая положению центра масс объекта. Затем создается имитатор массы и главных центральных моментов инерции 1 (приведенный на фиг.1 в первом варианте). Далее начало системы координат 11 имитатора массы и главных центральных моментов инерции 1 размещают в заданной точке 15 габаритного имитатора 20, соответствующей положению центра масс объекта, а оси совмещают с соответствующими направлениями главных центральных осей модели объекта. Тем самым создается модель объекта в виде компоновочного имитатора, который представляет собой сборочный узел, получаемый совмещением габаритного имитатора 20 и имитатора массы и главных центральных моментов инерции 1.
Затем определяют массово-центровочные и инерционные характеристики модели объекта.
Созданная такая модель объекта в виде компоновочного имитатора позволяет наряду с определением массово-центровочных и инерционных характеристик изделия производить в упрощенном виде и компоновочные работы.
В третьем варианте осуществления способа моделирования в компьютерных системах трехмерного проектирования на основе исходных данных для объекта (например, габаритный чертеж и т.д.) создается габаритный имитатор модели объекта 20, представляющий собой компьютерную трехмерную модель с его наружной геометрией заданной нулевой плотностью материала (приведенный на фиг.3). Затем создаются трехмерные модели шести одинаковых шаров 2, 3, 4, 5, 6, 7, суммарная масса которых равна массе объекта. Затем центры шаров 2, 3, 4, 5, 6, 7 располагают из условия обеспечения идентичности значений моментов инерции соответствующим значениям модели объекта. Координаты центров шаров 2, 3, 4, 5, 6, 7 в системе координат OXYZ рассчитываются по формулам:
X1=X0cosα1+Xц.м.
Y1=X0cosβ1+Yц.м.
Z1=X0cosγ1+Zц.м.
X2=-X0cosα1+Xц.м.
Y2=-X0cosβ1+Yц.м.
Z2=-X0cosγ1+Zц.м.
X3=Y0cosα2+Xц.м.
Y3=Y0cosβ2+Yц.м.
Z3=Y0cosγ2+Zц.м.
X4=-Y0cosα2+Xц.м.
Y4=-Y0cosβ2+Yц.м.
Z4=-Y0cosγ2+Zц.м.
X5=Z0cosα3+Xц.м.
Y5=Z0cosβ3+Yц.м.
Z5=Z0cosγ3+Zц.м.
X6=-Z0cosα3+Xц.м.
Y6=-Z0cosβ3+Yц.м.
Z6=-Z0cosγ3+Zц.м.
Затем определяют массово-центровочные и инерционные характеристики модели объекта.
Такой способ создания компоновочного имитатора путем непосредственного расположения (вставки) трехмерных моделей шести шаров является более удобным для исполнителя, что повышает производительность выполнения работ.
Использование предлагаемого способа моделирования в компьютерных системах трехмерного проектирования позволит:
1) использовать менее производительную вычислительную технику;
2) повысить производительность выполнения работ;
3) расширить функциональные возможности;
4) упростить компоновочные работы.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Справочник конструктора РЭА. Общие принципы конструирования. Под редакцией Р.Г.Варламова. Москва "Советское радио", 1980, с.170.
2. Каталог. Эффективные решения CAD/CAM/PDM. Компания АСКОН, Санкт-Петербург, сентябрь 2001, с.6-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ 3D (ТРЕХМЕРНОГО) ПАРАМЕТРИЧЕСКОГО МОДЕЛИРОВАНИЯ ПРОТОЧНОЙ ЧАСТИ КОРПУСА ЦЕНТРОБЕЖНОГО НАСОСА | 2015 |
|
RU2615040C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ МАССО-ЦЕНТРОВОЧНЫХ И МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ТВЕРДОГО ТЕЛА ВРАЩЕНИЯ | 2010 |
|
RU2445592C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ЦЕНТРОБЕЖНЫХ НАСОСОВ | 2013 |
|
RU2542160C1 |
| СПОСОБ КОРРЕКЦИИ ПОЛОЖЕНИЯ ГЛАВНОЙ ЦЕНТРАЛЬНОЙ ОСИ ИНЕРЦИИ БАЛЛИСТИЧЕСКОГО ОБЪЕКТА | 2009 |
|
RU2400712C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ МНОГОКОМПОНЕНТНЫХ ИЗДЕЛИЙ В КОМПЬЮТЕРНЫХ СИСТЕМАХ ДВУХ- И ТРЕХМЕРНОГО ПРОЕКТИРОВАНИЯ | 2014 |
|
RU2622211C2 |
| Динамически-подобная модель для испытаний в аэродинамической трубе | 2023 |
|
RU2813967C1 |
| СПОСОБ КОМПЬЮТЕРНОГО МОДЕЛИРОВАНИЯ ЦЕНТРОВКИ ГРУЗОВОГО САМОЛЕТА ТИПА АН-124-100 | 2006 |
|
RU2331109C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Комплекс полунатурного моделирования движения авиационного средства поражения | 2021 |
|
RU2767712C1 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
Изобретения относятся к области компьютерного проектирования и могут быть использованы при проектировании многокомпонентных изделий с помощью компьютерных систем трехмерного моделирования. Техническим результатом данного изобретения является возможность использования менее производительной вычислительной техники, повышение производительности выполнения работ, расширение функциональных возможностей, и упрощение процесса компоновки. Для этого создают компьютерную модель объекта, определяют массово-центровочные и инерционные характеристики модели объекта, при этом согласно первому варианту модель объекта создают в виде массово-инерционного имитатора, представляющего собой имитатор массы и главных центральных моментов инерции, состоящий из трехмерных моделей шести одинаковых шаров, суммарная масса которых равна массе объекта, согласно второму варианту модель объекта создают в виде компоновочного имитатора, который представляет собой сборочный узел, получаемый совмещением габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала и заданной точкой, соответствующей положению центра масс объекта, и имитатора массы и главных центральных моментов инерции, а согласно третьему варианту создают модель объекта в виде компоновочного имитатора, который представляет собой сборочный узел, состоящий из габаритного имитатора модели объекта, представляющего трехмерную модель с его наружной геометрией, заданной нулевой плотностью материала и размещенных в нем трехмерных моделей шести одинаковых шаров, суммарная масса которых равна массе объекта. 3 н.п. ф-лы, 5 ил.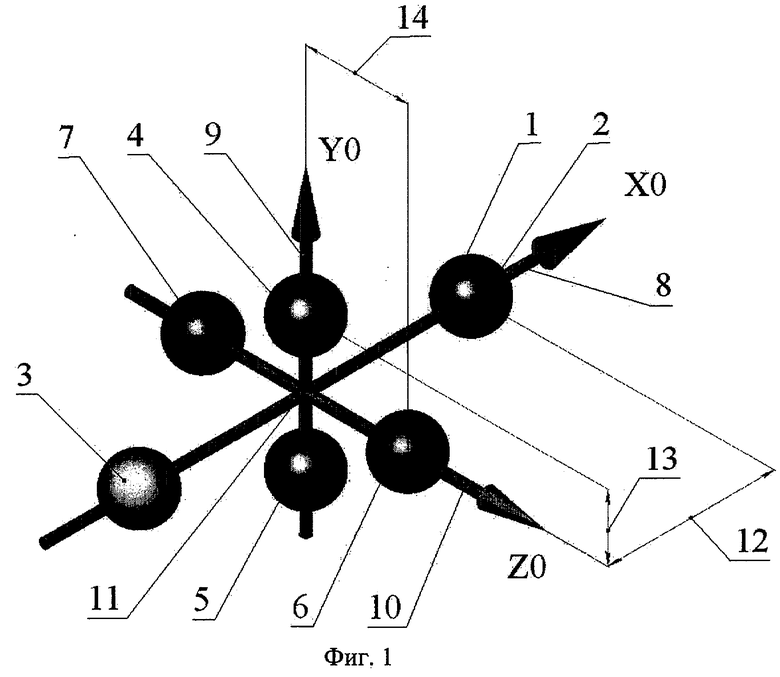
где М - масса объекта;
Jxo, Jyo, Jzo - главные центральные моменты инерции объекта,
затем начало системы координат имитатора массы и главных центральных моментов инерции размещают в точке, соответствующей положению центра масс объекта, а оси совмещают с соответствующими направлениями главных центральных осей трехмерной модели объекта и тем самым создают трехмерную модель объекта в виде массово-инерционного имитатора, после чего определяют массово-центровочные и инерционные характеристики трехмерной модели объекта в виде массово-инерционного имитатора.
где М - масса объекта;
Jxo, Jyo, Jzo - главные центральные моменты инерции объекта,
затем начало системы координат имитатора массы и главных центральных моментов инерции размещают в заданной точке габаритного имитатора, соответствующей положению центра масс объекта, а оси совмещают с соответствующими направлениями главных центральных осей инерции трехмерной модели объекта и тем самым создают трехмерную модель объекта в виде компоновочного имитатора, после чего определяют массово-центровочные и инерционные характеристики трехмерной модели объекта в виде компоновочного имитатора.
X1 = X0 cosα1 + Xцм;
Y1 = X0 cosβ1 + Yцм;
Z1 = X0 cosγ1 + Zцм;
X2 = - X0 cosα1 + Xцм;
Y2 = - X0 cosβ1 + Yцм;
Z2 = - X0 cosγ1 + Zцм;
X3 = Y0 cosα2 + Xцм;
Y3 = Y0 cosβ2 + Yцм;
Z3 = Y0 cosγ1 + Zцм;
X4 = - Y0 cosα2 + Xцм;
Y4 = - Y0 cosβ2 + Yцм;
Z4 = - Y0 cosγ2 + Zцм;
X5 = Z0 cosα3 + Xцм;
Y5 = Z0 cosβ3 + Yцм;
Z5 = Z0 cosγ3 + Zцм;
X6 = - Z0 cosα3 + Xцм;
Y6 = - Z0 cosβ3 + Yцм;
Z6 = - Z0 cosγ3 + Zцм;
где Xц.м, Yц.м, Zц.м - координаты точки, соответствующей положению центра масс объекта;
cosα1, cosβ1, cosγ1, cosα2, cosβ2, cosγ2, cosα3, cosβ3, cosγ3 - направляющие косинусы, определяющие направления главных центральных осей инерции объекта
где М - масса объекта;
Jxo, Jyo, Jzo - главные центральные моменты инерции объекта;
и тем самым создают трехмерную модель объекта в виде компоновочного имитатора, после чего определяют массово-центровочные и инерционные характеристики трехмерной модели объекта в виде компоновочного имитатора.
| СПОСОБ КОМПЬЮТЕРНОГО ПРОЕКТИРОВАНИЯ КОНСТРУКЦИЙ И ТЕХНОЛОГИЙ ИЗГОТОВЛЕНИЯ МНОГОПАРАМЕТРИЧЕСКИХ ИЗДЕЛИЙ | 2001 |
|
RU2192046C1 |

