Изобретение (техническое решение) относится к области моноимпульсных гидролокационных систем, а именно к способам обнаружения и определения местоположения навигационных препятствий, определения места судна по искусственным и естественным подводным ориентирам как в надводном, так и в подводном положении судна.
В настоящее время, из уровня техники известен способ локации фазовой суммарно-разностной моноимпульсной локационной системой (Хеллгрен Г. «Вопросы теории моноимпульсной радиолокации» \\ Зарубежная радиоэлектроника, 1962, №12, с. 10-48; Роде Д.Р. «Введение в моноимпульсную радиолокацию»: пер. с англ. - М.: Сов. Радио, 1960, с. 31-33, 43-62; Васин В.В., Власов О.В., Григорин-Рябов В.В., Дудник П.И., Степанов Б.М. «Радиолокационные устройства». - М.: Сов. Радио, 1970, с. 454-456), принятый за ближайший аналог (прототип). Реализуется данный способ следующим образом. В моноимпульсной локационной системе, снабженной несколькими отдельными приемопередающими антеннами, формирование суммарного и разностного приемных каналов идет посредством сумматора и вычитателя, подключенных к выходам антенн, образуя три линейно независимых приемных канала (один суммарный и два разностных - в вертикальной и горизонтальной плоскостях), затем сигналы последовательно поступают на нормирующие усилители и фазовый детектор умножающего типа, который одновременно обеспечивает фильтрацию перемноженных сигналов на высокой частоте, при этом сигнал разностного приемного канала перед его подачей в фазовый детектор предварительно пропускают через фазовращатель. Выходной сигнал фазового детектора образует пеленгационную характеристику этой системы: его величина соответствует углу расположения лоцируемого объекта относительно равносигнального направления антенной системы. К числу недостатков прототипа можно отнести небольшую ширину сектора обзора обследуемого пространства, малое число распознаваемых объектов.
Технической целью (задачей) заявляемого изобретения является устранение вышеуказанных недостатков, а его техническим результатом - создание способа моноимпульсной гидролокации, обеспечивающего расширение сектора обзора гидролокационной системы и увеличение числа одновременно разрешаемых объектов, без увеличения размеров антенной системы.
Поставленная задача достигается тем, что в заявляемом техническом решении при локации цели в вертикальной и горизонтальной плоскостях приемопередающая антенна, состоящая из отдельных электроакустических преобразователей, образует суммарный, разностный и фазоопорный приемные каналы, формируя тем самым шесть линейно независимых приемных каналов (вертикальной и горизонтальной плоскостях), при этом сигналы суммарного и разностного приемных каналов по отдельности подаются на фазовые детекторы умножающего типа, на вторые входы которых подан сигнал соответствующего фазоопорного приемного канала, сигналы каждого разностного приемного канала перед подачей на фазовые детекторы умножающего типа предварительно пропускают через фазовращатель, затем выходные сигналы фазовых детекторов умножающего типа суммарного и разностных приемных каналов делят на выходной сигнал фазового детектора умножающего типа соответствующего фазоопорного приемного канала, после чего полученные сигналы образуют двухпараметрическую пеленгационную характеристику (отдельно в горизонтальной и вертикальной плоскостях), жирным выделены существенные признаки изобретения, отличающие его от прототипа. Именно вышеуказанная совокупность признаков обеспечивает получение изобретением заявленного технического результата.
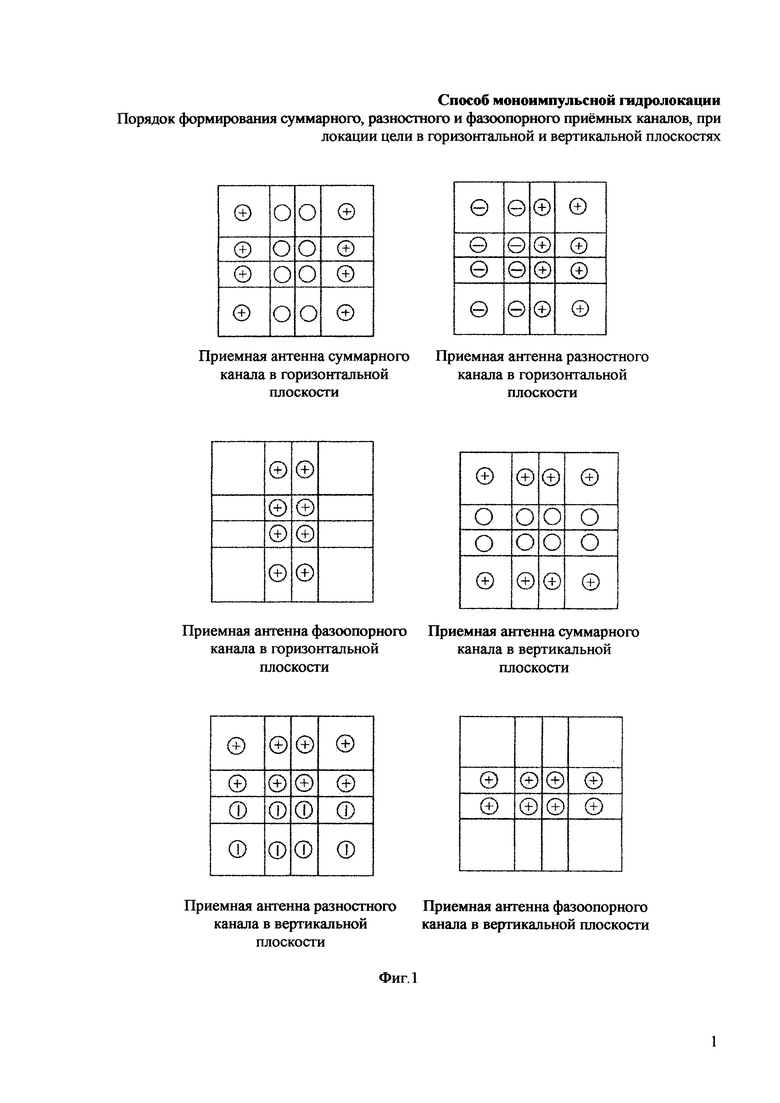
На Фиг. 1 приведен порядок формирования приемопередающей антенной суммарного, разностного и фазоопорного приемных каналов (при локации цели в горизонтальной и вертикальной плоскостях), на Фиг. 2 - структурная схема трехканальной фазовой суммарно-разностной гидролокационной системы, реализующей заявляемое техническое решение в одной из плоскостей.
Заявляемое изобретение реализуется следующим образом. При работе локационной системы на прием сигнал от приемопередающей антенны 1 поступает в сумматоры 2 и вычитатель 3, которые формируют три приемных канала: суммарный (UΣ), разностный (UΔ), фазоопорный (Uфо). При этом в горизонтальной плоскости (Фиг. 1) сигнал для суммарного приемного канала UΣ формируют путем суммирования сигналов с крайней правой вертикальной субантенны и крайней левой субантенны на сумматоре, сигнал для разностного приемного канала UΔ формируют подачей сигнала с двух правых вертикальных субантенн на сумматор и подачей на вычитатель сигнала с двух левых вертикальных субантенн, и сигнал для фазоопорного приемного канала Uфо формируют подачей на сумматор сигнала с двух средних вертикальных субантенн. При локации цели в вертикальной плоскости (Фиг. 1) сигнал для суммарного приемного канала UΣ формируют подачей сигналов с крайней верхней субантенны и крайней нижней субантенны на сумматор, сигнал для разностного приемного канала UΔ формируют подачей сигнала с двух верхних горизонтальных субантенн на сумматор и подачей на вычитатель сигнала с двух нижних горизонтальных субантенн, и сигнал для фазоопорного приемного канала Uфо формируют подачей на сумматор сигнала с двух средних горизонтальных субантенн.
Затем сигналы приемных каналов поступают на нормирующие усилители 4, с выходов усилителей сигналы разностных, суммарных и фазоопорных приемных каналов (
Техническое решение позволяет реализовать два режима измерения: локацию цели одновременно в горизонтальной и вертикальной плоскостях или локацию цели в той или иной плоскости по отдельности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 1991 |
|
RU2076334C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАЛОВЫСОТНЫХ ЦЕЛЕЙ ПО УГЛУ МЕСТА В ФАЗОВОЙ СУММАРНО-РАЗНОСТНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2020517C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| УГЛОВОЙ ДИСКРИМИНАТОР | 2002 |
|
RU2202806C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2015 |
|
RU2606707C1 |
| Моноимпульсная радиолокационная станция с автоматической калибровкой | 2016 |
|
RU2632477C1 |

Изобретение относится к области моноимпульсных гидролокационных систем, а именно к способам обнаружения и определения местоположения навигационных препятствий, определения места судна по искусственным и естественным подводным ориентирам как в надводном, так и в подводном положении судна. Техническим результатом заявляемого изобретения является создание способа моноимпульсной гидролокации, обеспечивающего расширение сектора обзора гидролокационной системы и увеличение числа одновременно разрешаемых объектов, без увеличения размеров антенной системы. Поставленная задача достигается тем, что в заявляемом техническом решении при локации цели в вертикальной и горизонтальной плоскостях приемопередающая антенна, состоящая из отдельных электроакустических преобразователей, образует суммарный, разностный и фазоопорный приемные каналы, формируя тем самым шесть линейно независимых приемных каналов (вертикальной и горизонтальной плоскостях), при этом сигналы суммарного и разностного приемных каналов по отдельности подаются на фазовые детекторы умножающего типа, на вторые входы которых подан сигнал соответствующего фазоопорного приемного канала, сигналы каждого разностного приемного канала перед подачей на фазовые детекторы умножающего типа предварительно пропускают через фазовращатель, затем выходные сигналы фазовых детекторов умножающего типа суммарного и разностных приемных каналов делят на выходной сигнал фазового детектора умножающего типа соответствующего фазоопорного приемного канала, после чего полученные сигналы образуют двухпараметрическую пеленгационную характеристику (отдельно в горизонтальной и вертикальной плоскостях). 2 ил.
Способ моноимпульсной гидролокации, включающий образование суммарного и разностных приемных каналов от приемопередающей антенны, состоящей из отдельных электроакустических преобразователей, и формирование пеленгационной характеристики путем совместной обработки сигналов суммарного и разностного приемных каналов с использованием фазового детектора умножающего типа и фазовращателя, отличающийся тем, что электроакустические преобразователи электрически соединены таким образом, что в дополнение к суммарным и разностным приемным каналам формируются фазоопорные приемные каналы, образуя шесть линейно независимых приемных каналов (вертикальной и горизонтальной плоскостях), при этом сигналы суммарного и разностного приемных каналов по отдельности подаются на фазовые детекторы умножающего типа, на вторые входы которых подан сигнал соответствующего фазоопорного приемного канала, сигналы каждого разностного приемного канала перед подачей на фазовые детекторы предварительно пропускают через фазовращатель, затем выходные сигналы фазовых детекторов суммарного и разностных приемных каналов делят на выходной сигнал фазового детектора соответствующего фазоопорного приемного канала, после чего полученные сигналы образуют двухпараметрическую пеленгационную характеристику (отдельно в горизонтальной и вертикальной плоскостях).
| Злыгостев И.Н., Черемисин А.А | |||
| Шестиканальная моноимпульсная локационная система | |||
| Известия Вузов | |||
| Физика | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Томск, 1-7 октября 2012 г., 4-я Международная научно-практическая конференция | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для нагревания окружающей его воды | 1920 |
|
SU257A1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Упругая предохранительная муфта | 1950 |
|
SU99368A1 |
| JP 2009180514 A, 13.08.2009 | |||
| US 3863259 A, 28.01.1975. | |||

