Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления движением легких и сверхлегких самолетов, дистанционно пилотируемых летательных аппаратов (ДПЛА) и им подобных.
Известно устройство управления полетом дистанционно-пилотируемых летательных аппаратов (Системы адаптивного управления летательными аппаратами / А.С.Новоселов, В.Е.Болнокин, П.И.Чинаев, А.Н.Юрьев. - М.: Машиностроение, 1987), в котором установлены на борт автопилот, бортовой компьютер, радиолиния и навигационная система и реализованы два режима полетом летательного аппарата: в режиме ручного пилотирования, при котором команды траекторного управления с выхода радиолинии подаются в автопилот, и режим программного управления, при котором в бортовом компьютере формируют команды управления для коррекции траектории полета летательного аппарата на основании предварительно введенных координатах точек маршрута и определенных с помощью навигационной системы текущих координат местоположения летательного аппарата.
Недостатком данного устройства является сложность вождения летательного аппарата по заданной траектории при ручном способе траекторного управления. Использование на дистанционно-пилотируемом летательном аппарате навигационной системы не всегда возможно, так как это ведет к значительному возрастания стоимости комплекса, особенно в случае применения инерциальных систем навигации, а также увеличению массогабаритных характеристик.
Известно устройство управления полетом дистанционно-пилотируемых летательных аппаратов ("Иностранная печать об экономическом, научно-техническом и военном потенциале государств - участников СНГ и технических средствах его выявления", серия "Технические средства разведывательных служб зарубежных государств" - М.: Ежемесячный информационный бюллетень Всероссийского института научной и технической информации (ВИНИТИ), выпуск N 12, 2002 г., стр.6-7.), состоящее из бортового компьютера с введенными координатами поворотных пунктов маршрута полета дистанционно-пилотируемого летательного аппарата по программной траектории и приемника спутниковой системы навигации, в процессе полета на дистанционно-пилотируемом летальном аппарате с помощью приемника спутниковой системы навигации определяются координаты его текущего местоположения в полете по фактической траектории, подают значения координат текущего местоположения в бортовой компьютер, где с использованием их определяют отклонение фактической траектории полета дистанционно-пилотируемого летательного аппарата от его программной траектории и формируют команды управления для коррекции фактической траектории полета дистанционно-пилотируемого летательного аппарата, которые с выхода бортового компьютера подают в автопилот для соответствующего отклонения рулей.
В приведенном устройстве управления полетом дистанционно-пилотируемых летательных аппаратов для стабилизации центра масс необходимо вводить и запоминать некоторое число заранее заданных поворотных точек маршрута (программную траекторию). Наряду с этим существует круг задач, когда маршрут полета не может быть заранее определен и в процессе полета задается оператором. К таким задачам относятся задачи мониторинга некоторой территории, ледовой разведки, проведения поисковых работ на местности, управления полетом некоторых классов воздушных мишеней и другие задачи с заранее неопределенным маршрутом полета. В этом случае приведенное устройство неэффективно, так как нецелесообразно заранее определять поворотные точки маршрута ввиду информационной недостаточности. Гораздо эффективнее при решении этих задач применять управления дистанционно-пилотируемыми летательными аппаратами при помощи оператора. Однако в полете на дистанционно-пилотируемые летательные аппараты могут действовать ветровые возмущения, которые существенно изменяют траекторию полета и требуют от оператора частой корректировки полета с целью компенсации бокового сноса дистанционно-пилотируемого летательного аппарата при наличии ветра.
Технический результат, на достижение которого направленно заявляемое изобретение, заключается в упрощении управления оператором дистанционно-пилотируемых летательных аппаратов.
Технический результат достигается тем, что в устройство, содержащее приемник спутниковой системы навигации и автопилот, дополнительно введены командный прибор, первый выход которого соединен с первым входом автопилота, блок формирования местной системы координат, управляющий вход которого соединен со вторым выходом командного прибора, остальные входы соединены с выходами приемника спутниковой системы навигации, блок формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM, соединенный с выходами блока формирования местной системы координат и приемника спутниковой системы навигации; блок формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM, соединенный с третьим выходом блока формирования местной системы координат и третьим выходом приемника спутниковой системы навигации; блок формирования сигналов управления, входы которого соединены с выходами блока формирования значения отклонения центра масс летательного аппарата по оси ОMZM в плоскости OMXMZM и блока формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM; релейный элемент, управляющий вход которого соединен со вторым выходом командного прибора, второй вход которого соединен с выходом блока формирования сигналов управления, выход соединен со вторым входом автопилота.
Сущность изобретения поясняется на фиг.1-6, где:
фиг.1 - используемые системы координат;
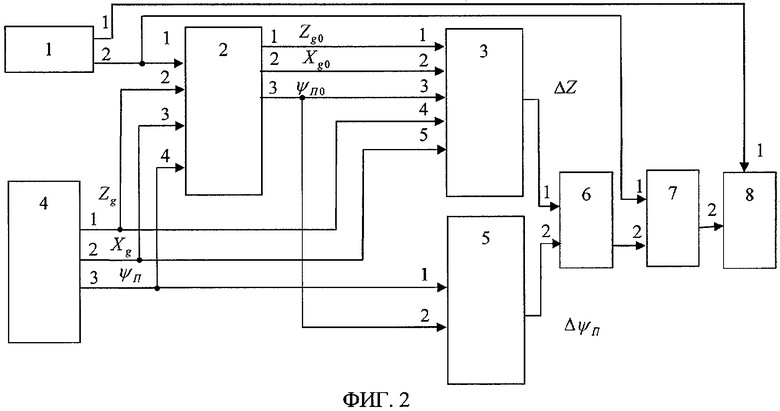
фиг.2 - блок-схема устройства управления дистанционно-пилотируемым летательным аппаратом;
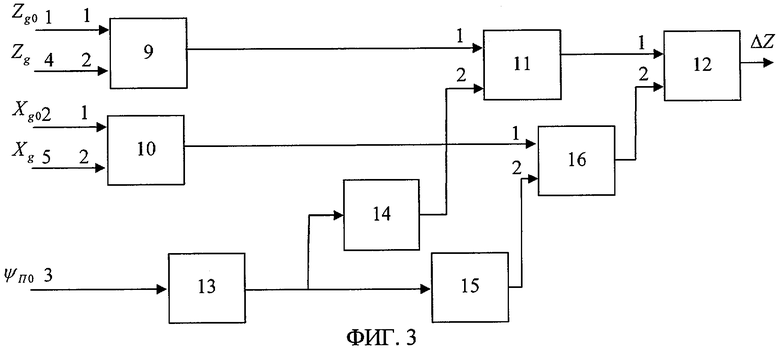
фиг.3 - блок-схема блока формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM;
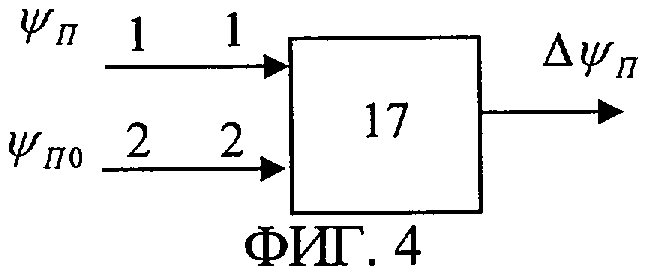
фиг.4 - блок-схема блока формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM;
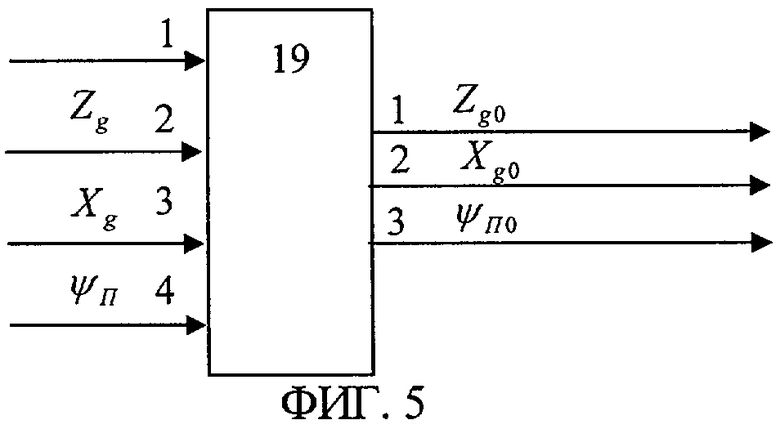
фиг.5 - блок-схема реализации блока формирования местной системы координат;
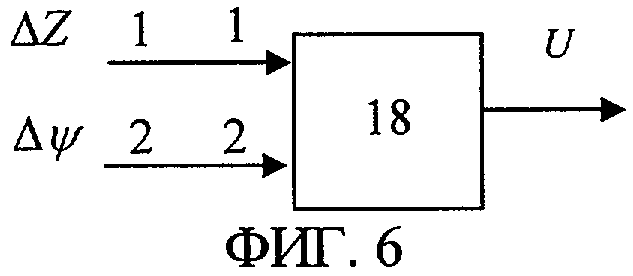
фиг.6 - блок формирования сигналов управления.
Приняты следующие обозначения:
OgXgYgZg - географическая система координат;
OMXMYMZM - местная система координат;
Хg0, Zg0 - координаты точки начала координат местной системы координат в географической системе координат;
ψП0 - путевой угол в момент прохождения команды;
ψП - текущий путевой угол;
VП - вектор путевой скорости;
ΔZ - значение отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM;
ΔψП - угол между вектором путевой скорости и осью ОMХM в плоскости OМXМZМ;
ϕ - угол поворота местной системы координат относительно географической;
U - сигнал управления.
Устройство содержит:
1 - командный прибор;
2 - блок формирования местной системы координат;
3 - блок формирования значения отклонения центра масс летательного аппарата по оси ОMZM в плоскости OMXMZM;
4 - приемник спутниковой системы навигации;
5 - блок формирования угла между вектором путевой скорости и осью ОMХM в плоскости ОMXMZM;
6 - блок формирования сигналов управления;
7 - релейный элемент;
8 - автопилот.
Устройство содержит командный прибор 1, первый выход которого соединен с первым входом автопилота, второй выход соединен с первым входом блока формирования местной системы координат 2, второй, третий и четвертый входы которого соединены соответственно с первым, вторым и третьим выходами приемника спутниковой системы навигации 4, первый и второй выходы которого соединены с четвертым и пятым входами блока формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM 3, первый, второй и третий входы которого соединены с первым, вторым и третьим выходами блока формирования местной системы координат 2, а выход соединен с первым входом блока формирования сигналов управления 6, второй вход которого соединен с выходом блока формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM 5, первый вход которого соединен с третьим выходом приемника спутниковой системы навигации 4, второй вход соединен с третьим выходом блока формирования местной системы координат 2, выход блока формирования сигналов управления 6 соединен со вторым входом релейного элемента 7, первый вход которого соединен с выходом командного прибора 1, а выход соединен со вторым входом автопилота 8.
Блок формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM 3 содержит:
9 - первый сумматор;
10 - второй сумматор;
11 - первый блок умножения;
12 - третий сумматор;
13 - инвертор;
14 - блок вычисления косинуса;
15 - блок вычисления синуса;
16 - второй блок умножения.
Блок формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости OMXMZM 3 содержит первый сумматор 9, первый и второй инвертирующие, входы которого являются первым и четвертым входами блока 3, выход соединен с первым входом первого блока умножения 11, второй вход которого соединен с выходом блока вычисления косинуса 14, вход которого соединен с выходом инвертора 13; третий сумматор 12, первый вход которого соединен с выходом первого блока умножения 11, второй вход которого соединен с выходом второго блока умножения 16, второй вход которого соединен с выходом блока вычисления синуса 15, первый вход соединен с выходом второго сумматора 10, первый и второй входы которого являются вторым и пятым входами блока 3, третьим входом которого является вход инвертора 13, выход которого соединен с блоком вычисления синуса 15; выходом блока формирования значения отклонения центра масс летательного аппарата по оси OMZM в плоскости ОMХMZM 3 является выход третьего сумматора 12.
Блок формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM 5 содержит 17 - пятый сумматор.
Блок формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM 5 содержит пятый сумматор 17. Первый и второй входы пятого сумматора 17 являются первым и вторым входом блока формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM 5, выходом которого является выход пятого сумматора 17.
Блок формирования местной системы координат 2 содержит 19 - блок памяти.
Блок формирования местной системы координат 2 содержит блок памяти 19, первый вход которого, являющийся первым входом блока 2, соединен с выходом командного прибора 1, второй, третий и четвертый входы, являющиеся вторым, третьим и четвертыми входами блока 2, соединены соответственно с первым, вторым и третьим входами приемника спутниковой системы навигации 4, первый, второй и третий выходы являются первым, вторым и третьим выходами блока формирования местной системы координат 2.
Блок формирования сигналов управления 6 содержит 18 - суммирующий усилитель.
Блок формирования сигналов управления 6 содержит суммирующий усилитель 18. Первый и второй входы суммирующего усилителя 18 являются первым и вторым входом блока формирования сигналов управления 6, выходом которого является выход суммирующего усилителя 18.
Предложенное устройство управления дистанционно-пилотируемым летательным аппаратом реализует два режима полета: режим стабилизации заданной линии пути и режим маневрирования по курсу.
В процессе полета производят измерение посредством приемника спутниковой системы навигации 4 текущих координат местоположения дистанционно-пилотируемого летательного аппарата Xg, Zg в горизонтальной плоскости и текущего значения путевого угла ψП. Заданную линию пути дистанционно-пилотируемого летательного аппарата формируют в момент прохождения команды на стабилизацию заданной линии пути с командного устройства 1, в качестве которого может использоваться, например, приемник командной радиолинии на борту. С этой целью в момент появления команды на стабилизацию заданной линии пути посредством блока памяти 2 запоминают координаты местоположения дистанционно-пилотируемого летательного аппарата Xg0, Zg0 в горизонтальной плоскости и значение заданного путевого угла ψП0 в момент прохождения команды.
В режиме стабилизации заданной линии пути в блоке 3 формируют значение отклонения ΔZ центра масс летательного аппарата по оси OMZM в плоскости OXMZM в виде
ΔZ=cosϕ(Zg+Zg0)+sinϕ(Xg-Хg0),
где ϕ=-ψП.
Для этого на выходе инвертора 13 формируют сигнал ϕ=-ψП, который поступает через блок вычисления косинуса 13 и блок вычисления синуса 14 соответственно на вторые входы первого блока умножения 11, второго блока умножения 15. На выходе первого сумматора 9 формируют сигнал разности сигналов Zg и Zg0, поступающих соответственно на первый и второй инвертирующий, входы. Сформированный сигнал поступает на первый вход первого блока умножения 11, на выходе которого формируется сигнал (Zg-Zg0)cosϕ. На выходе второго сумматора 10 формируют сигнал разности сигналов Xg и Хg0, поступающих соответственно на первый и второй, инвертирующий, входы. Сформированный сигнал поступает на первый вход второго блока умножения 15, на выходе которого формируется сигнал (Xg-Xg0)sinϕ. С выходов первого блока умножения 11 и второго блока умножения 15 полученные сигналы поступают соответственно на первый и второй входы третьего сумматора 12, на выходе которого формируется значение отклонения ΔZ центра масс летательного аппарата по оси OMZM в плоскости OXMZM.
Также в режиме стабилизации формируют значение угла между вектором путевой скорости и осью ОMХM в плоскости OXMZM в виде
ΔψП=ψП-ψП0.
Для этого в блоке формирования угла между вектором путевой скорости и осью ОMХM в плоскости OMXMZM 5 вычисляется разность сигналов, поступающих на первый и второй, инвертирующий, входы пятого сумматора 17, которые являются соответственно первым и вторым входами блока 5. Сигнал разности формируется на выходе пятого сумматора 17, который является выходом блока 5.
Формируют сигнал управления U на основе полученных сигналов в виде
U=kψΔψП+kZΔZ,
для чего в блоке формирования сигналов управления 6 вычисляется сумма сигналов, поступающих на первый и второй входы суммирующего усилителя 18, которые являются соответственно первым и вторым входами блока 6. Сигнал управления формируется на выходе суммирующего усилителя 18, который является выходом блока 6.
Сформированный на выходе блока 6 сигнал управления поступает через релейный элемент на автопилот для непосредственного воздействия на рулевые органы с целью возвращения ДПЛА на заданную линию пути.
В режиме маневрирования по курсу сигнал управления U равен нулевому значению. Отключение сигнала управления от автопилота производится релейным элементом 7 по сигналу с командного прибора 1. В это время управление траекторией движения происходит путем подачи управляющих команд на автопилот с первого выхода командного прибора 1.
Предложенное устройство упрощает управление оператором дистанционно-пилотируемых летательных аппаратов, не усложняя аппаратный состав бортового и наземного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДИСТАНЦИОННО-ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2292068C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| КОМПЛЕКС ВЗЛЕТА, ПИЛОТИРОВАНИЯ И ПОСАДКИ АВТОМАТИЗИРОВАННЫХ ВОЗДУШНЫХ СУДОВ | 2006 |
|
RU2376203C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ (ВАРИАНТЫ) | 1999 |
|
RU2182313C2 |
Изобретение относится к области приборостроения и может быть использовано в системах управления боковым движением легких и сверхлегких самолетов, малоразмерных дистанционно-пилотируемых летательных аппаратов (МДПЛА) и подобных. Технический результат - упрощение процесса управления. Для достижения данного результата устройство содержит приемник спутниковой системы навигации и автопилот, командный прибор, первый выход которого соединен с первым входом автопилота. При этом блоки формирования местной системы координат и значений отклонений центра масс летательного аппарата расширяют область параметрического управления МДПЛА. 4 з.п. ф-лы, 6 ил.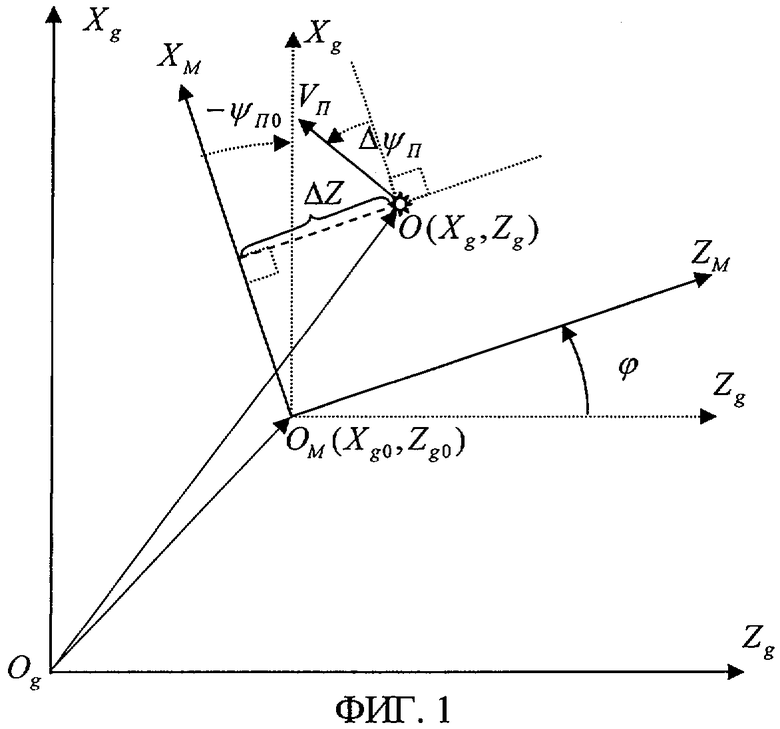
| Иностранная печать об экономическом, научно-техническом и военном потенциале государств - участников СНГ и технических средствах его выявления | |||
| Серия "Технические средства разведывательных служб зарубежных государств" | |||
| - М.: Ежемесячный информационный бюллетень Всероссийского института научной и технической информации (ВИНИТИ), выпуск №12, 2002, |

