Изобретение относится к авиационному приборостроению, в частности к информационным средствам навигации, прицеливания и пилотирования летательных аппаратов (ЛА).
Патентный поиск в ВПТБ проведен по классификациям “Скорость движения судов, измерение” G 01 Р 5/00, “Транспортных средств самоходных, измерение” В 62 D 6/00, 101:00, “Измерение с помощью гироскопического эффекта” G 01 P 9/00-9/04, “Измерение параметров полета самолетов, линейные” В 64 D 43/02, G 01 Р 3/00-3/80, “Навигационные, связанные с измерением скорости или ускорения” G 01 С 21/10-21/18, “Комбинированные для измерения двух и более параметров движения” G 01 С 23/00.
В качестве прототипа взят наиболее близкий по технико-технологической сущности комплексный способ определения вектора земной скорости и угла сноса ЛА, суть которого изложена в книге [1] Помыкаева И.И. и др. Навигационные приборы и системы. М., Машиностроение, 1983 г., стр. 86-90.
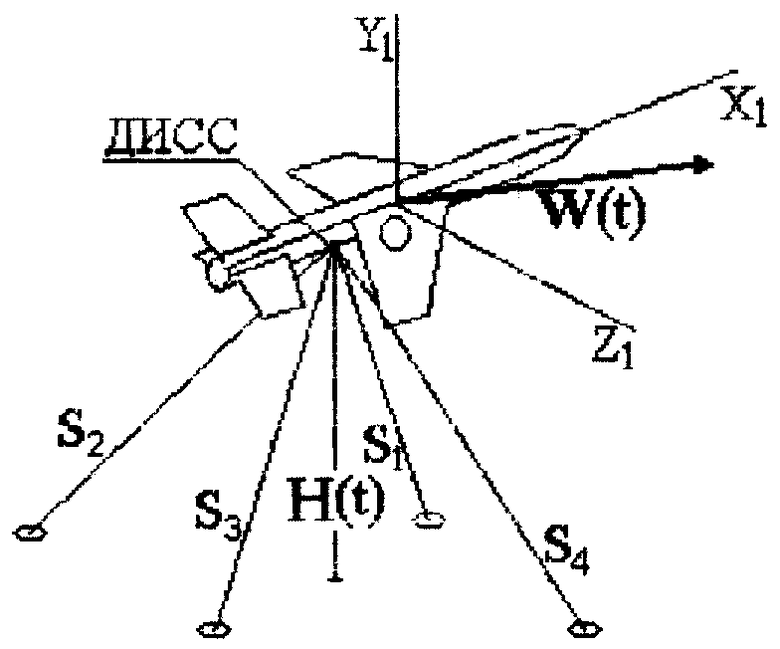
По прототипу на борту ЛА вектор его земной скорости W(t) определяют с помощью W1(t) гироинерциальной навигационной системы (ГИНС), которую корректируют по данным многолучевого доплеровского измерителя скорости WД(t) и угла сноса α CH(t) (ДИСС). ДИСС-ом измеряют доплеровские частоты FДi и (t) по каждому из последовательно коммутируемых его приемопередающих радиолокационных каналов-лучей i (рис.1).
Доплеровские частоты, как известно, пропорциональны скорости сближения DДi и (t)=λ · Fi и (t)/2 ЛА с участком земной поверхности, визируемым i каналом-лучом ДИСС, где λ - длина волны излучаемых радиолокационных колебаний. При условии выполнения в цикле коммутации успешных измерений доплеровских частот не менее чем по трем каналам-лучам решают систему из трех уравнений:

с тремя неизвестными WДХ1(t), WДY1(t), WДZ1(t) – проекциями вектора земной скорости ЛА  на оси связанной с ним системы координат, вычисляют их по данным ДИСС, где Θ i, hi – углы ориентации i-го луча ДИСС относительно связанной с ЛА системы координат ОХ1Y1Z1 (первый поворот против часовой стрелки вокруг оси ОY1 на угол Θ i, второй – вокруг оси OZ на угол hi).
на оси связанной с ним системы координат, вычисляют их по данным ДИСС, где Θ i, hi – углы ориентации i-го луча ДИСС относительно связанной с ЛА системы координат ОХ1Y1Z1 (первый поворот против часовой стрелки вокруг оси ОY1 на угол Θ i, второй – вокруг оси OZ на угол hi).
Угол сноса α СН(t) по ([1], стр. 88, обозначен χ ) для ДИСС с нестабилизированной антенной определяется зависимостью

то есть как угол между продольной осью ЛА O(t)X1 и проекцией вектора его земной скорости  на плоскость O(t)X1Z1.
на плоскость O(t)X1Z1.
Для получения значения вектора земной скорости ЛА в гироинерциальной (ГИНС) системе координат О(t)ХgYgZg по существующему способу сначала по текущим значениям углов курса ψ (t), тангажа υ (t) и крена γ (t), измеряемых ГИНС, вычисляют тригонометрические функции этих углов sinψ (t), cosψ (t), sinυ (t), cosυ (t), sinγ (t), cosγ (t), потом направляющие косинусы матрицы перехода М1←g(t) от гироинерциальной O(t)ХgYgZg к связанной системе координат O(t)X1Y1Z1:
а затем и искомые проекции WДXg(t), WДYg(t), WДZg(t) вектора  :
:

Разностями:
корректируют показания ГИНС о векторе земной скорости:

Первый недостаток существующего способа заключается в том, что погрешности определения углов ψ (t), υ (t), γ (t) трансформируются в неточности вычисления тригонометрических функций sinψ (t), cosψ (t), sinυ (t), cosυ (t), sinγ (t), cosγ (t), а затем многократно повторяясь и накапливаясь, в значительные ошибки определения направляющих косинусов (3). Этот громоздкий, трудоемкий алгоритм определения направляющих косинусов должен реализовываться в полном объеме за время каждого цикла измерений ДИСС и потому требует от современных цифровых вычислительных машин значительных ресурсов и быстродействия, что затрудняет их реализацию в реальном масштабе времени и не позволяет повышать частоту коммутации лучей, от чего опять же зависит точность ДИСС.
Второй недостаток – “маневронеустойчивость” ДИСС. Маневр ЛА по тангажу или/и крену приводит к скольжению лучей по земной поверхности, увеличению для некоторых из них одновременно наклонной дальности, углов падения, размеров площади облучаемых ими на земле пятен, расширению диапазона доплеровских частот, снижению интенсивности отраженного в обратном направлении сигнала, или вообще их “отрыва” от земной поверхности и полного отсутствия отраженного сигнала. Эти факторы снижают точность работы и приводят к возрастанию вероятности сбоев ДИСС; трехлучевого хотя бы по одному, а четырехлучевого по двум каналам-лучам одновременно, когда сигналом “Память” запрещают вычисления скорости и угла сноса” [2] Техническое описание ДИСС-7, кн. 1, ред. ГМ1 641.007 ТО, 1972 г., стр. 10, 41, 54-56, да они становятся и невозможными из-за неопределенности системы (1), а полученные до этого измерения не используют, отбрасывают.
Третий недостаток заключается в том, что время цикла трех последовательных измерений без сбоев длится обычно 300-510 мс и с каждым сбоем увеличивается на 100-170 мс. При этом допущение о постоянстве составляющих вектора земной скорости WДХ1(t), WДY1(t), WДZ1(t) при решении системы (1) для современных маневрирующих и колеблющихся вокруг центра массы ЛА, особенно при появлении сбоев, является грубым и тоже приводит к появлению ошибок.
Четвертым недостатком существующего способа является то, что при потере сигнала в канале-луче на последующих циклах коммутации осуществляют поиск сигнала во всем рабочем диапазоне доплеровских частот ([2] Техническое описание ДИСС-7, к.н. 1, редакция ГМ1. 641.007 ТО, 1972 г., стр. 41-43), что требует значительного времени и может привести либо к повторному пропуску измерения, либо к захвату помехи и ложному измерению, либо к захвату требуемой доплеровской частоты и возобновлению измерений.
Пятым недостатком является то, что первый и четвертый лучи (рис.1), ориентированные в переднюю полусферу военного ЛА, демаскируют его радиоизлучением при подходе к линии фронта, к цели, и тем самым преждевременно оповещают фронтовую и объектовую ПВО противника, включая и станции постановки активных помех, о своем приближении, что также влияет на точность и устойчивость работы ДИСС.
Шестым недостатком является неправильная трактовка и реализация (2) определения угла сноса α СН(t), по сути не соответствующая теоретическим положениям классической теории бомбометания [3] Тихонов М.Д. и др. Бомбометание. М., Редиздат ЦС ОСОАВИАХИМА СССР, 1938, стр. 14, 15, где даже для неманеврирующего ЛА указано, что “угол, составляемый направлением воздушной скорости самолета V и направлением его путевой скорости W, называется углом сноса – УС”. Методическая ошибка определения угла сноса как одного из определяющих параметров пространственного движения ЛА приводит к погрешностям решения задач “грузометания”, особенно при энергичном маневрировании ЛА.
Цель изобретения – повысить точность и устойчивость определения вектора земной скорости W1(t) и угла сноса α СН(t) ЛА, в том числе и при выполнении маневра.
Указанные выше недостатки существующего способа предлагается устранить путем внедрения дополнительных и изменения существующих технологических операций, в соответствии с которыми:
1. Текущие значения направляющих косинусов матрицы перехода М1←g(t) от гироинерциальной O(t)ХgYgZg к связанной O(t)X1Y1Z1 системе координат получают более точным, простым, быстродействующим способом – методом интегрирования дифференциальных кинематических уравнений Пуассона:
где ω x(t), ω y(t), ω z(1) – проекции вектора абсолютной угловой скорости вращения ЛА вокруг центра массы на оси связанной системы координат, получаемые, например, от существующего блока датчиков угловых скоростей (БДУС);
ϕ 11И(t), ϕ 12И(t), ... , ϕ 32И(t), ϕ '11И(t), ϕ '12И(t), ... , ϕ '32И(t), – направляющие косинусы и их производные соответственно при начальных (корректируемых) значениях направляющих косинусов, получаемых по известному алгоритму (3) на основании данных ГИНС в начальный и корректируемые моменты времени t0:
При коррекциях синхронно, то есть в тот же момент времени t0, регистрируют выходные текущие значения интеграторов ϕ И11(t0), ϕ И12(t0), ϕ И13(t0), ϕ И21(t0), ϕ И22(t0), ϕ И23(t0), ϕ И31(t0), ϕ И32(t0), ϕ И33(t0) значения углов ψ (t0) и υ (t0), γ (t0), а затем вычисляют (8) и определяют накопившиеся к моменту t0 ошибки интеграторов:
Потом, после завершения вычислений (7)-(9) уже в момент времени t0+δ t, опять берут текущие значения интеграторов, вычисляют для него с учетом (9) новые начальные значения:
обнуляют интеграторы, вводят в них новые начальные условия (10), вновь запускают интеграторы и на выходе последних получают уточненные текущие значения направляющих косинусов ϕ И11(t), ϕ И12(t), ϕ И13(t), ϕ И21(t), ϕ И22(t), ϕ И23(t), ϕ И31(t), ϕ И32(t), ϕ И33(t).
Изложенное демонстрирует, что существующий громоздкий, трудоемкий алгоритм определения направляющих косинусов используют не на каждом цикле измерений, а только при формировании начальных условий и в моменты коррекции процесса интегрирования дифференциальных уравнений Пуанссона. K тому же процесс коррекции “раздвигают” по времени на δ t, чем облегчают его реализацию в цифровой вычислительной машине “в реальном масштабе времени”.
Предлагаемый способ получения направляющих косинусов матрицы перехода от гироинерциальной к связанной системе координат обладает большим быстродействием, легче реализуется в реальном масштабе времени даже при повышенной частоте коммутации лучей, открывает возможность считывания направляющих косинусов не только синхронно, но и с требуемой высокой частотой, вплоть до частоты квантования шагом интегрирования дифференциальных уравнений Пуассона.
2. Дополнительно, перед коммутацией очередного i-го луча ДИСС, определяют направляющий косинус μ 12i(t) матрицы перехода MЛi←g(t0) от гироинерциальной О(t)ХgYgZg системы координат к оси O(t)XЛi лучевой системы координат:
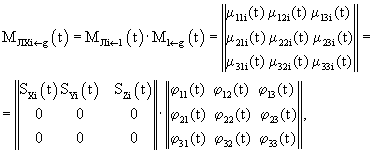
где SХi(t), SYi(t), SZi(t) – направляющие косинусы трех/четырех матриц перехода Mлi←1(t)(от связанной О(t)X1Y1Z1 к оси O(t)XЛi лучевой “Лi” системе координат, которые, как известно, являются постоянными величинами и хранятся в памяти вычислителя ДИСС:


3. Дополнительно включают имеющиеся на борту ЛА измерения высоты полета H(t) и определяют, выполняются ли энергетические условия устойчивого выделения отраженного от земли сигнала ДИСС при текущих значениях пространственной ориентации очередного i луча, в том числе и маневрирующего ЛА, например, с помощью неравенства

где НПРД – предельная высота устойчивого выделения сигнала, отраженного от земли.
4. Если условие (12) не выполняется, то берут следующее значение i, производят вычисления (11), (12) для следующего луча и т.д. до тех пор, пока не будет выполнено условие (12). Тем самым за счет исключения неустойчивых по (12) измерений уменьшают временной интервал цикла получения трех необходимых измерений для решения системы типа (1).
5. При выполнении условия (12)
- вычисляют еще два направляющих косинуса для i-го луча, по которому ожидается измерение:

- по данным ГИНС о составляющих W1xg(t) W1yg(t) W1zg(t) вектора W1g(t) земной скорости ЛА определяют прогнозируемое значение  скорости сближения по i-му лучу:
скорости сближения по i-му лучу:

- настраивают прогнозируемым значением скорости сближения  доплеровский фильтр i-го луча ДИСС, что позволяет отказаться от режима “поиска” доплеровского сигнала по всему диапазону и искать его в локальной области
доплеровский фильтр i-го луча ДИСС, что позволяет отказаться от режима “поиска” доплеровского сигнала по всему диапазону и искать его в локальной области  чем повышают быстродействие и надежность повторного захвата, устойчивость и точность измерений ДИСС;
чем повышают быстродействие и надежность повторного захвата, устойчивость и точность измерений ДИСС;
- коммутируют i-й луч ДИСС для производства измерения.
6. При состоявшемся измерении определяют невязку  по i-му лучу:
по i-му лучу:

7. По полученной невязке  формируют очередное уравнение системы типа (1) применительно к составляющим соответственно вектора не земной скорости ЛА WДХ1(t), WДY1(t), WДZ1(t), как в (1), а приращений земной скорости Δ WДХ1(t), Δ WДY1(t), Δ WДZ1(t), то есть ускорения:
формируют очередное уравнение системы типа (1) применительно к составляющим соответственно вектора не земной скорости ЛА WДХ1(t), WДY1(t), WДZ1(t), как в (1), а приращений земной скорости Δ WДХ1(t), Δ WДY1(t), Δ WДZ1(t), то есть ускорения:
 где χ - последовательность измерений (1 – последнее, 2 – предпоследнее, 3 – предшествующее предпоследнему).
где χ - последовательность измерений (1 – последнее, 2 – предпоследнее, 3 – предшествующее предпоследнему).
8. В систему (16) включают как бессбойную последовательность χ =1, 2, 3 измерений, так при χ =2, 3 и отбрасываемые по прототипу измерения, выполненные до или между предшествующими сбоями.
9. Анализируют полученную систему (16) из трех уравнений на предмет наличия двух линейно зависимых (один и тот же луч i и одинаковые значения 
 при χ =1, 2, 3) и при наличии таковых запрещают ее решение, исключают полученное линейно зависимое уравнение, и так до тех пор, пока при следующем измерении не будет получена система линейно независимых уравнений.
при χ =1, 2, 3) и при наличии таковых запрещают ее решение, исключают полученное линейно зависимое уравнение, и так до тех пор, пока при следующем измерении не будет получена система линейно независимых уравнений.
10. Определяют решением системы (16) вектор Δ W(t) приращений земной скорости ЛА по составляющим в связанной системе координат O(t)X1Y1Z1:

11. Формируют с помощью уже вычисленных направляющих косинусов (7) транспонированную матрицу перехода М :
:

12. Производят статистическую обработку составляющих вектора приращений земной скорости, например, по методу скользящего среднего на выборке n:
13. Полученными таким образом оценками приращений Δ WХg(t), Δ WYg(t), Δ WZg(t) корректируют соответственно поканально показания ГИНС и получают в итоге более точные и надежные текущие значения вектора земной скорости ЛА:

14. Лучи ДИСС ориентируют за пределами сектора передней полусферы, где в настоящее время происходит демаскирование ЛА при преодолении ПВО зоны фронта и атакуемой наземной цели.
15. Дополнительно используют имеющиеся на борту ЛА текущие значения вектора его воздушной скорости V(t), представляют этот вектор по составляющим в гироинерциальной O(t)XgYgZg системе координат  и, с учетом (20), определяют угол сноса α СН(t) как угол между трехмерными векторами
и, с учетом (20), определяют угол сноса α СН(t) как угол между трехмерными векторами  и
и  :
:
A=VYg(t)· (WГZg(t)+Δ WZg(t))–VZg(t)· (WГYg(t)+Δ WYg(t));
B=VZg(t)· (WГXZg(t)+Δ WXg(t))–VXg(t)· (WГZg(t)+Δ WZg(t));
C=VXg(t)· (WГYg(t)+Δ WZY(t))–VYg(t)· (WГXg(t)+Δ WXg(t));

|sin(α CH(t)|=G;
α СН(t)=arcsin(G)(sign[(B· VZg(t)–C· VYg(t))· (WГXg(t)+Δ WXg(t))+
+(C· VXg(t)–A· VZg(t))· (WГYg(t)+Δ WYg(t))+
+(A· VYg(t)–B· VXg(t))· (WГZg(t)+Δ WZg(t))].
Горизонтальная α СН. Г.(t) и вертикальная α СН. В.(t) составляющие угла сноса могут быть вычислены по формулам

соответственно.
На чертеже представлено расположение лучей многолучевого ДИСС и вектора земной скорости ЛА.
Таким образом предлагаемым способом устраняются указанные выше недостатки существующего способа и достигается поставленная цель изобретения – повышается точность и устойчивость определения вектора земной скорости и угла сноса, в том числе и маневрирующего ЛА.
Источники информации
1. Помыкаева И.И. и др. Навигационные приборы и системы. Учебное пособие. Машиностроение, М., 1983 г., используется в качестве ближайшего аналога способу, стр.86-90.
2. Техническое описание ДИСС-7, кн.1, ред. ГМ1. 641.007 ТО, 1972 г., стр. 10, 41, 54-56.
3. Тихонов М.Д. и др. Бомбометание. М., Редиздат ЦС ОСОАВИАХИМА СССР, 1938, стр.14, 15.
Изобретение относится к авиационному приборостроению, в частности к средствам навигации, прицеливания и пилотирования летательных аппаратов (ЛА). Сущность изобретения: вектор земной скорости определяют с помощью гироинерциальной навигационной системы, которую корректируют по данным многолучевого доплеровского измерителя скорости, при этом направляющие косинусы матрицы перехода от гироинерциальной к связанной с ЛА системе координат получают методом интегрирования дифференциальных уравнений Пуассона по данным об абсолютных угловых скоростях ЛА. По данным о высоте и пространственной ориентации лучей определяют те из них, для которых выполняются энергетические условия устойчивого выделения отраженного от земли сигнала, и их коммутируют для измерений. Вычисляют для коммутируемого луча прогнозируемую скорость сближения для управления доплеровским фильтром, получают невязку между измеренным и прогнозируемым значениями скорости сближения и на ее основе получают очередное уравнение для составляющих вектора приращений земной скорости в связанной системе координат. Решают получаемую таким образом систему трех линейно независимых уравнений, включая уравнения, полученные до или между сбоями. Вычисляемые значения вектора приращений земной скорости представляют по составляющим в гироинерциальной системе координат, производят статистическую обработку и полученными статистическими оценками корректируют гироинерциальную систему. Угол сноса определяют как угол между текущими значениями трехмерных векторов воздушной скорости и измеряемой земной скорости ЛА. Достигается повышение точности и устойчивости определения вектора земной скорости и угла сноса ЛА при маневрировании. 1 ил.
Способ определения вектора земной скорости и угла сноса летательного аппарата, заключающийся в том, что на борту с помощью многолучевого измерителя доплеровских частот определяют доплеровские частоты по коммутируемым приемопередающим радиолокационным лучам, на основании этих измерений корректируют первые ступени интеграторов гироинерциальной навигационной системы и на ее выходе получают уточненные значения вектора земной скорости летательного аппарата, отличающийся тем, что направляющие косинусы матрицы перехода от гироинерциальной к связанной системе координат получают методом интегрирования кинематических дифференциальных уравнений Пуассона по данным от блока датчиков угловых скоростей летательного аппарата при начальных корректируемых значениях, которые вычисляют по данным о мгновенных значениях углов курса, тангажа и крена, получаемых от гироинерциальной навигационной системы, по данным высотомера и пространственной ориентации лучей к коммутации для измерений допускаются только те лучи, для которых выполняются энергетические условия устойчивого выделения отраженного от земли сигнала, по данным гироинерциальной навигационной системы о составляющих вектора земной скорости летательного аппарата и пространственной ориентации коммутируемого луча вычисляют для него прогнозируемое значение скорости сближения для настройки его доплеровского фильтра, после состоявшегося измерения получают невязку между измеренным и прогнозируемым значениями скорости сближения по этому лучу и на ее основе получают очередное уравнение для составляющих вектора приращений земной скорости в связанной системе координат, при наличии линейной связи этого уравнения с двумя предыдущими его исключают и коммутируют очередной луч, для которого тоже выполняются энергетические условия устойчивого выделения отраженного от земли сигнала, проводят измерения, вычисляют прогнозируемое значение скорости сближения, настраивают доплеровский фильтр этого луча, получают невязку и на ее основе получают очередное уравнение для составляющих вектора приращений земной скорости до получения системы трех линейно независимых уравнений, решают эту систему, включая уравнения, полученные до или между возможными сбоями, получают значения составляющих вектора приращений земной скорости в связанной системе координат, представляют полученный вектор по составляющим в гироинерциальной системе координат, производят статистическую обработку получаемых измерений, например, по методу скользящего среднего на выборке, полученными статистическими оценками корректируют соответственно поканально показания гироинерциальной системы и получают уточненные значения вектора земной скорости летательного аппарата, к тому же лучи доплеровского измерителя при установке на летательном аппарате ориентируют за пределами сектора передней полусферы, чтобы не происходило радиодемаскирования летательного аппарата при подлете к ПВО зоны фронта и атакуемой наземной цели, угол сноса определяют как угол между текущими значениями трехмерных векторов земной и воздушной скоростей летательного аппарата, для чего наряду с уточненным текущим значением вектора земной скорости дополнительно учитывают текущее значение трехмерного вектора его воздушной скорости.
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| Помыкаев И.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| - М.: Машиностроение, 1983, с.86-90, 403-407, 412-418 | |||
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.411-432 | |||
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА АБСОЛЮТНОЙ ЛИНЕЙНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2204805C1 |
| Трехрежимный центробежный регулятор частоты вращения двигателя внутреннего сгорания | 1984 |
|
SU1204763A1 |
| US 4070674 A, 24.01.1978. | |||

