Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления капсульным эндоскопом и содержащей его капсульной эндоскопической системе и, в частности, к системе управления капсульным эндоскопом и содержащей его капсульной эндоскопической системе, в которой капсульный эндоскоп приводится в движение таким образом, что он движется по спиральной траектории вдоль трубчатого органа, обеспечивая тем самым возможность точного диагностирования состояния стенки трубчатого органа.
Известный уровень техники
Обычный гибкий эндоскоп обтекаемой формы вводят через рот или задний проход и управляют им для диагностирования язвенных заболеваний внутренней стенки органов пищеварения, и это приносит пациенту страдания. Для решения проблемы разработан капсульный эндоскоп, форма которого позволяет с легкостью вводить его в органы пищеварения через рот и который производит съемку движений внутренней стороны органов пищеварения внутри органов пищеварения во время движения внутренней стороны органов пищеварения вследствие перистальтики органов пищеварения, чтобы выполнить диагностирование.
Однако такой капсульный эндоскоп имеет несколько недостатков, заключающихся в том, что затруднительно точно провести диагностирование вследствие пассивного движения из-за перистальтики, и в том, что капсульный эндоскоп имеет ограниченный размер вследствие необходимости введения его через рот, в результате чего на капсульном эндоскопе трудно установить различные функциональные устройства.
Для устранения этих недостатков проводились исследования приводного механизма, предназначенного для приведения в действие капсульного эндоскопа, в котором применена электромагнитная система приведения в действие.
При этом для приведения в действие такого эндоскопа на момент создания изобретения предлагаются системы катушек индуктивности. Система катушек индуктивности для привода капсульного эндоскопа раскрыта, например, в публикации заявки на патент США № 2008/0272873 (далее именуемой «известный документ»). В публикации заявки на патент США № 2008/0272873 для перемещения капсульного эндоскопа в определенном направлении могут применяться в общей сложности 18 катушек индуктивности.
Однако известная система катушек индуктивности имеет недостаток, состоящий в том, что большое количество катушек индуктивности и отсутствие полной ясности роли каждой катушки может иметь результатом увеличение расхода электроэнергии на перемещение капсульного эндоскопа.
Сущность изобретения
Техническая задача
В связи с указанным выше, настоящим изобретением предпринята попытка решить вышеупомянутые проблемы, возникающие в известных технических решениях, и целью настоящего изобретения является создание системы управления капсульным эндоскопом и содержащей его капсульной эндоскопической системы, в которой, для получения данных изображения, капсульный эндоскоп приводится в движение так, что он перемещается по спиральной траектории вдоль трубчатого органа, обеспечивая тем самым возможность точного диагностирования состояния стенки трубчатого органа.
Другой целью настоящего изобретения является создание системы управления капсульным эндоскопом и содержащей его капсульной эндоскопической системы, которые позволяют генерировать вращающееся магнитное поле и градиентное магнитного поле, прикладываемые с наружной стороны, всего лишь при минимальном конфигурировании системы катушек индуктивности для осуществления движения по спиральной траектории капсульного эндоскопа, в результате чего упрощается конфигурация системы в целом и обеспечивается простота управления приведением в действие капсульного эндоскопа.
Следующей целью настоящего изобретения является создание системы управления капсульным эндоскопом и содержащей его капсульной эндоскопической системы, которые вызывают движение по спиральной траектории вдоль трубчатого органа за счет взаимодействия между вращающимся магнитным полем и градиентным магнитным полем, генерируемыми с наружной стороны.
Решение технической задачи
Для достижения вышеуказанных целей, в соответствии с особенностью настоящего изобретения, предлагается система управления капсульным эндоскопом, включающая в себя: первый узел катушек индуктивности, имеющий катушечные секции, которые фиксированы к трем осям, расположенным под прямым углом друг к другу, и генерируют магнитные поля в направлениях осей прямоугольной системы координат; второй узел катушек индуктивности, который расположен с возможностью генерации градиентного магнитного поля в любом направлении относительно магнитного поля, генерируемого первым узлом катушек индуктивности; часть для приведения в движение катушек индуктивности, предназначенную для приведения в движение второго узла катушек индуктивности таким образом для регулирования ориентации градиентного магнитного поля; блок управления, содержащий приемную часть, которая принимает сигнал изображения, переданный от капсульного эндоскопа; и управляющую часть, которая регулирует электрические токи, подаваемые в первый и второй узлы катушек индуктивности, для регулирования генерируемого магнитного поля и управляет частью для приведения в движение катушек индуктивности.
Предпочтительно, согласно настоящему изобретению часть для приведения в движение катушек индуктивности управляет вторым узлом катушек индуктивности таким образом, что вызывает его вращение в трехмерном пространстве посредством независимых двухосных вращений.
Предпочтительно, согласно настоящему изобретению каждый катушечная секция первого узла катушек индуктивности содержит катушку Гельмгольца.
Предпочтительно, согласно настоящему изобретению второй узел катушек индуктивности содержит катушку Максвелла.
Согласно другой особенности настоящего изобретения, в соответствии с настоящим изобретением предлагается капсульная эндоскопическая система, содержащая капсульный эндоскоп, который имеет намагниченность с углом наклона вектора намагниченности относительно продольного направления корпуса эндоскопа в пределах острых углов (0<δ<90°) и содержит модуль камеры для захвата изображения и передачи изображения к наружной стороне.
Согласно следующей особенности изобретения, в соответствии с настоящим изобретением предлагается капсульный эндоскоп, который способен совершать движение по спиральной траектории вдоль внутренней стороны трубчатого органа под действием вращающегося магнитного поля и градиентного магнитного поля, генерируемых с наружной стороны, причем капсульный эндоскоп имеет намагниченность с углом наклона вектора намагниченности относительно продольного направления эндоскопа в пределах острых углов (0<δ<90°) и способен захватывать изображение и передавать изображение к наружной стороне.
Полезные эффекты
Как описано выше, капсульная эндоскопическая система согласно настоящему изобретению может формировать вращающееся магнитное поле и градиентное магнитное поле, вызывающие движение по спиральной траектории капсульного эндоскопа посредством системы катушек индуктивности с минимальным количеством катушек индуктивности благодаря тому, что она содержит: часть для формирования магнитного поля, которая имеет первый узел катушек индуктивности, размещенный по трем осям прямоугольной системы координат, генерирующую магнитное поле, и второй узел катушек индуктивности, имеющий одну катушечную конструкцию для генерирования градиентного магнитного поля; и механическую часть для приведения в движение катушек индуктивности, предназначенную для вращения второго узла катушек индуктивности в трехмерном пространстве, вызывающего создание вращающегося магнитного поля и градиентного магнитного поля, так что вращающееся магнитное поле и градиентное магнитное поле формируются с помощью системы катушек индуктивности с минимальным количеством катушек индуктивности, в результате чего упрощается система управления капсульным эндоскопом.
Кроме того, капсульный эндоскоп, предлагаемый согласно настоящему изобретению, имеет характеристики намагничивания для движения по спиральной траектории вдоль внутренней стороны трубчатого органа под действием вращающегося магнитного поля и градиентного магнитного поля, генерируемых с наружной стороны.
Описание графических материалов
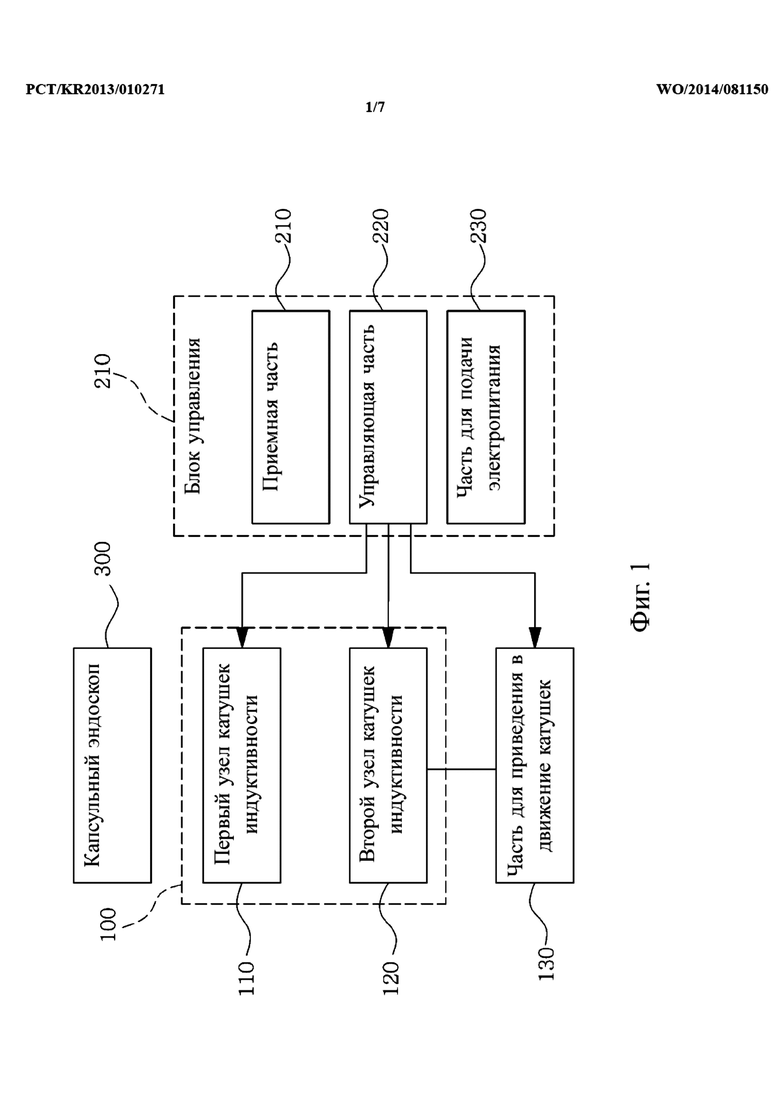
На фиг. 1 представлен вид, демонстрирующий конфигурацию капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
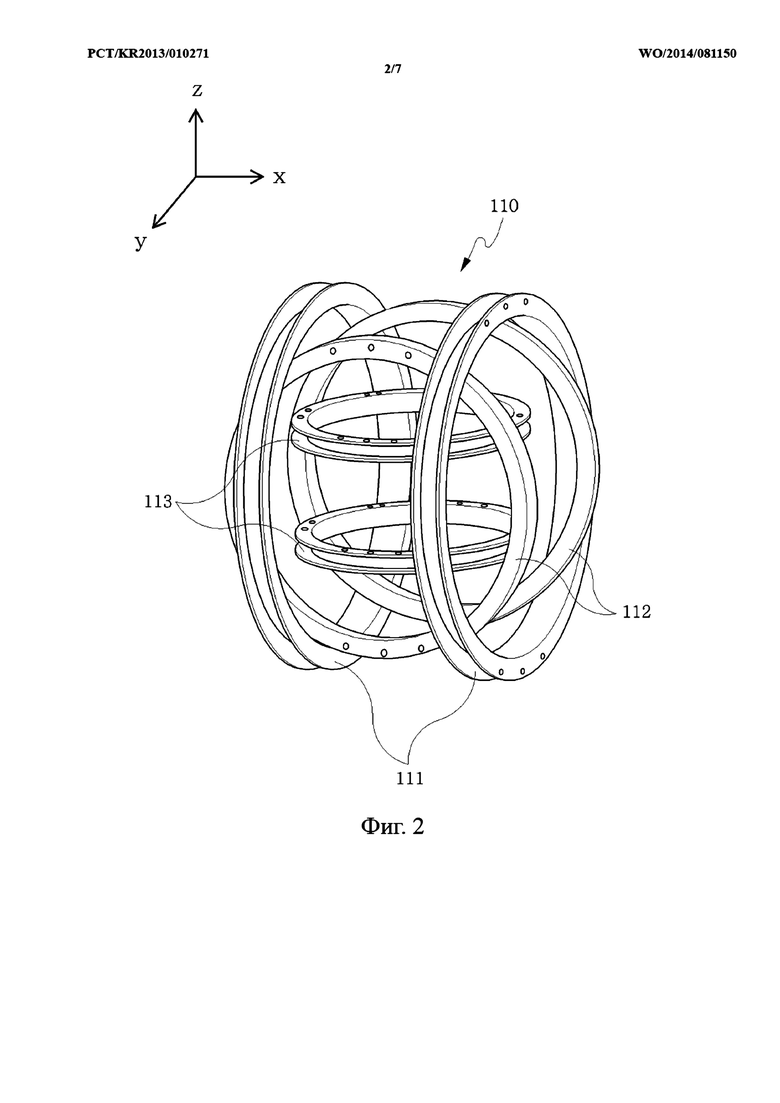
На фиг. 2 представлен вид, демонстрирующий первый узел катушек индуктивности капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
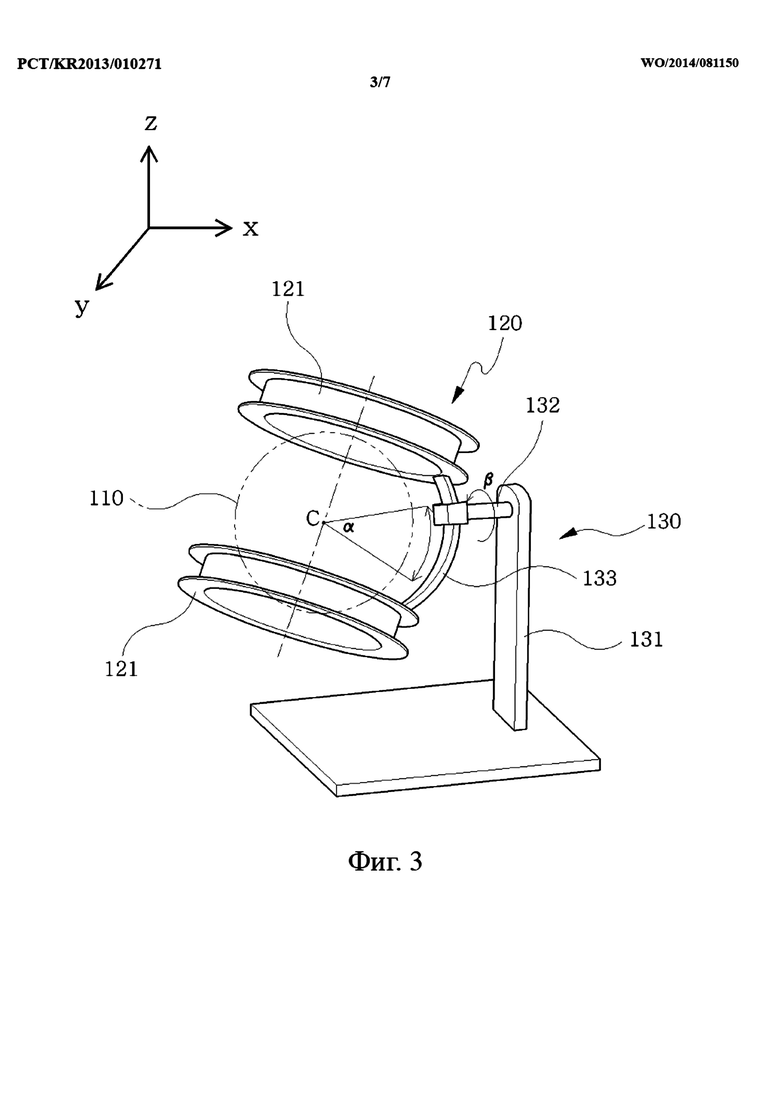
На фиг. 3 представлен вид, демонстрирующий второй узел катушек индуктивности и часть для приведения в движение катушек индуктивности капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
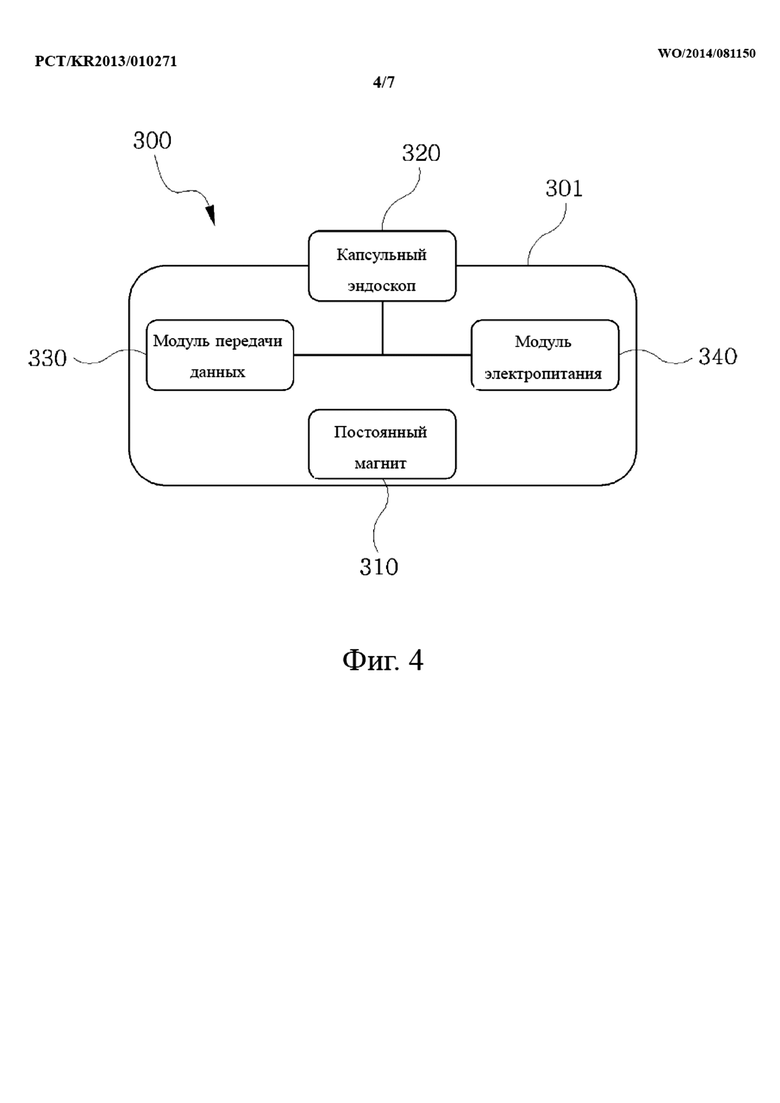
На фиг. 4 представлен вид, демонстрирующий капсульный эндоскоп капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
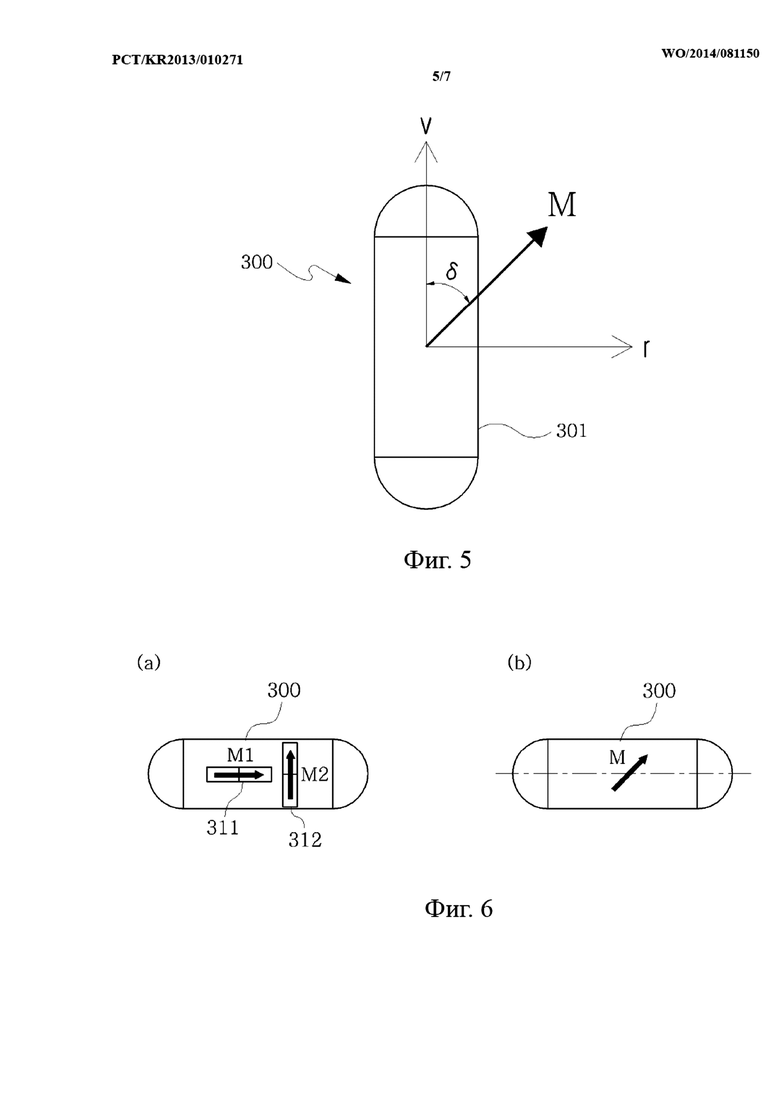
На фиг. 5, 6(a) и 6(b) представлены виды, демонстрирующие расположение векторов намагниченности капсульного эндоскопа капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
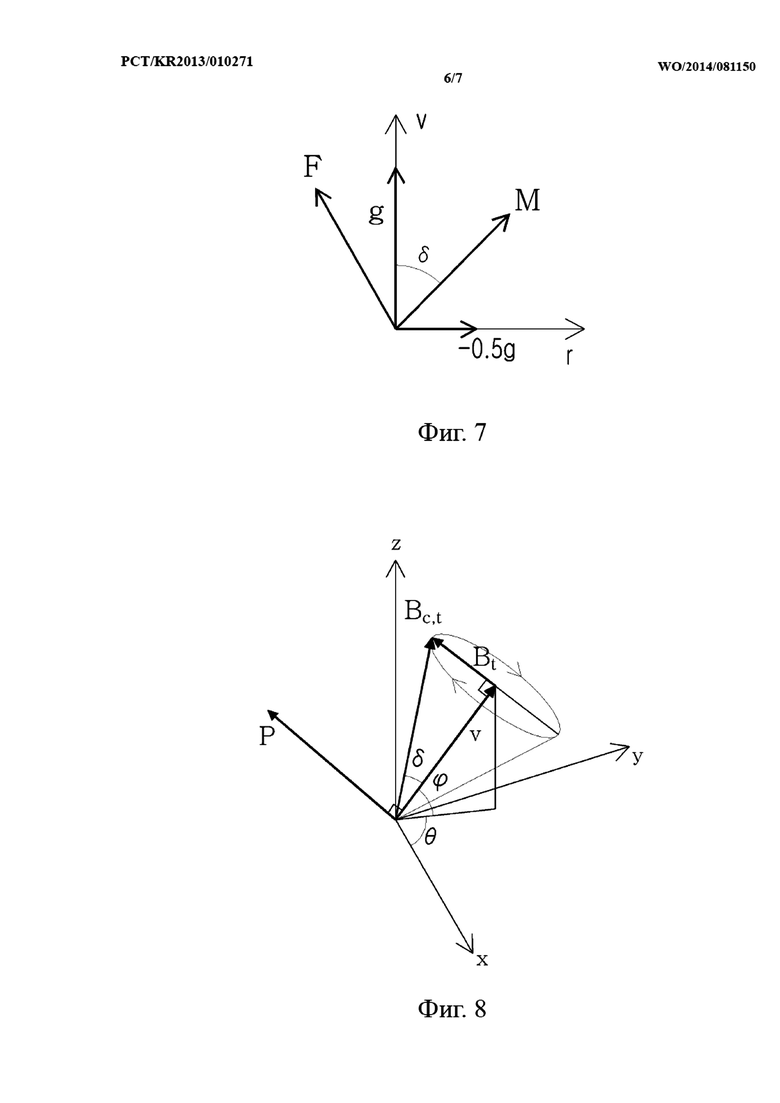
На фиг. 7 представлен вид, поясняющий поступательное перемещение капсульного эндоскопа капсульной эндоскопической системы согласно предпочтительному варианту настоящего изобретения.
На фиг. 8 представлен вид, поясняющий прецессию капсульного эндоскопа капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
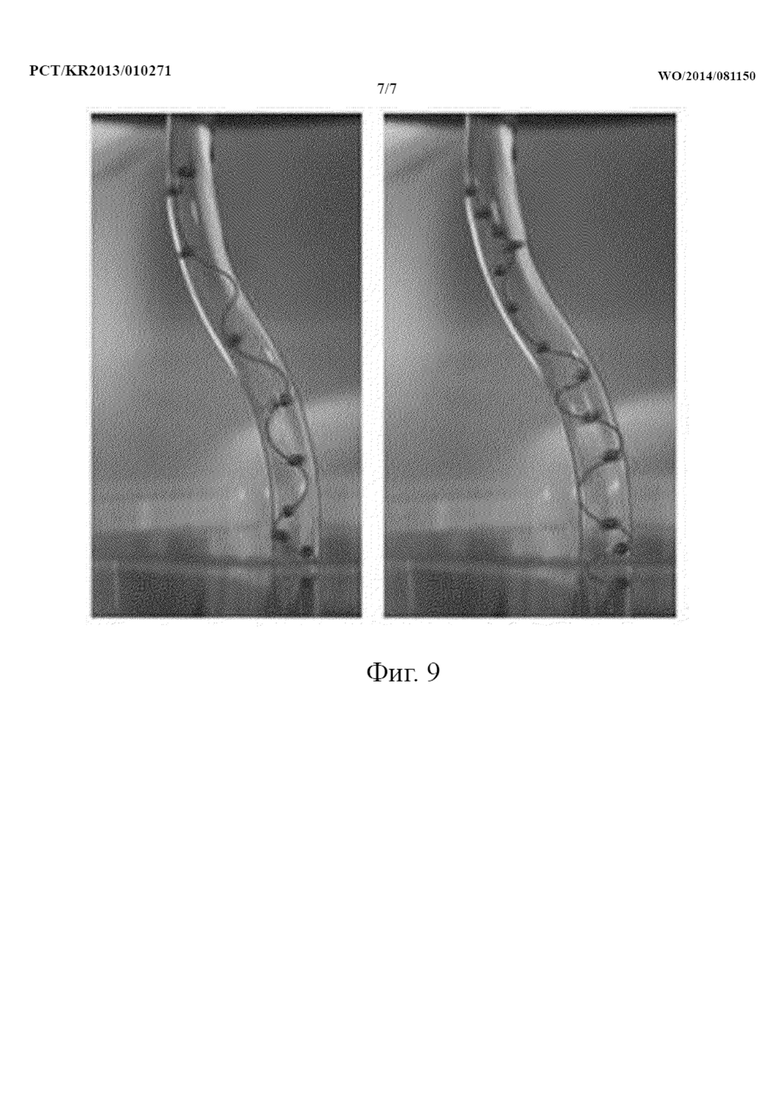
На фиг. 9 представлен фотоснимок, демонстрирующий пример действия капсульной эндоскопической системы согласно предпочтительному варианту осуществления настоящего изобретения.
Обозначения позиций чертежей
110- первый узел катушек индуктивности;
111 – катушечная секция оси x;
112 – катушечная секция оси y;
113 – катушечная секция оси z;
120 – второй узел катушек индуктивности;
130 – часть для приведения в движение катушек индуктивности;
131 – вертикальная стойка;
132 – поворотная консоль;
133 – подвижное плечо;
200 – блок управления;
210 – приемная часть;
220 – управляющая часть;
300 – капсульный эндоскоп;
301 – корпус;
310 – постоянный магнит;
320 – модуль камеры;
330 – модуль передачи данных;
340 – модуль электропитания.
Описание варианта осуществления изобретения
Следует учесть, что конкретные конструкции или пояснения функций, предлагаемые в иллюстративных вариантах осуществления настоящего изобретения, служат для описания вариантов осуществления согласно идеям настоящего изобретения. Однако следует понимать, что иллюстративные варианты осуществления изобретения не ограничивается раскрытыми частными формами исполнения, но наоборот, варианты осуществления изобретения должны охватывать все модификации, эквиваленты и альтернативные решения, укладывающиеся в пределы технической идеи и объема настоящего изобретения.
Следует также понимать, что слова или термины, употребляемые в описании настоящего изобретения, используются для описания конкретных вариантов осуществления настоящего изобретения и не предполагают ограничение настоящего изобретения. Форма единственного числа при упоминании компонентов может подразумевать множественное число, если в контексте конкретно не указано иначе. Следует также понимать, что термины «содержать; включать; включать в себя» или «иметь» в данном описании изобретения имеют тот смысл, что характеристики, численные значения, этапы, операции, компоненты, части или комбинации этапов, операций, компонентов и частей, описание которых приведено в описании изобретения, не исключают возможности существования других характеристик, численных значений, этапов, операций, компонентов, частей или комбинаций этапов, операций, компонентов и частей.
Ниже приведено подробное описание предпочтительного варианта осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
Как видно из фиг. 1, система управления капсульным эндоскопом согласно предпочтительному варианту осуществления настоящего изобретения включает в себя первый и второй узлы 110 и 120 катушек индуктивности, часть 130 для приведения в движение катушек индуктивности, предназначенную для вращения второго узла 120 катушек индуктивности, и блок 200 управления, предназначенный для приема информации, переданной от капсульного эндоскопа 300, и регулирования подачи электропитания к первому и второму узлам 110 и 120 катушек индуктивности для управления движением капсульного эндоскопа 300 с помощью магнитного поля.
Система управления капсульным эндоскопом, предлагаемая согласно настоящему изобретению, может вызывать прецессию капсульного эндоскопа 300 под действием магнитного поля, генерируемого первым узлом 110 катушек индуктивности, и движение по спиральной траектории, которое происходит в соприкосновении со стенкой трубчатого органа, когда капсульный эндоскоп 300 движется вдоль органа пищеварения под действием движущей силы, создаваемой градиентным магнитным полем, генерируемым вторым узлом 120 катушек индуктивности. Каждый из компонентов описан ниже.
Управление капсульным эндоскопом 300 осуществляется беспроводным способом магнитным полем, генерируемым частью 100 для генерации магнитного поля, которая содержит первый и второй узлы 110 и 120 катушек индуктивности.
Как показано на фиг. 2, первый узел 110 катушек индуктивности имеет катушечные секции 112, 112 и 113, которые соответственно фиксированы к трем осям, образующим друг с другом прямой угол, и которые могут генерировать магнитные поля в направлениях осей прямоугольной системы координат.
На чертежах это не показано, но следует понимать, что могут быть установлены опорные конструкции для обеспечения фиксации соответствующих катушечных секций.
Катушечные секции 111, 112 и 113 могут представлять собой соответственно катушечную секцию 111 оси x, катушечную секцию 112 оси y и катушечную секцию 113 оси z, и каждая из катушечных секций 111, 112 и 113 в основном может быть представлена катушечной конструкцией, которая генерирует однородное магнитное поле, вращающееся магнитное поле или градиентное магнитное поле в определенном направлении, зависящие от величины и направления подаваемого электрического тока.
Например, могут применяться катушки Гельмгольца или катушки Максвелла.
Две катушки Гельмгольца образуют пару. Две катушки Гельмгольца отстоят друг от друга на расстоянии радиуса по центральной оси и могут генерировать однородное магнитное поле, когда в две катушки подаются электрические токи одинаковой величины и одинакового направления.
При этом катушки Гельмгольца могут генерировать однородное магнитное поле, зависящее от величины и направления электрического тока, подаваемого в две катушки Гельмгольца. В соответствии с другим вариантом, комбинация из трех катушек Гельмгольца может генерировать вращающееся магнитное поле, и это описано в заявке на патент Кореи № 10-1128034, по которой выдан патент 12 марта 2012 года и которая подана тем же заявителем, что и заявитель по заявке на настоящее изобретение.
Две катушки Максвелла образуют пару. Две катушки имеют определенное расположение для генерации однородного градиентного магнитного поля, когда в две катушки подаются одинаковые по величине электрические токи в противоположных направлениях.
При этом, предпочтительно, в первом узле 110 катушек индуктивности применяются катушки Гельмгольца, которые легко располагаются по трем осям, чтобы они располагались под прямым углом друг к другу. На фиг. 2 показан первый узел катушек индуктивности, имеющий две катушки Гельмгольца.
Как описано выше, три катушечные секции 111, 112 и 113, которые соответственно фиксированы к трем осям для генерации однородного магнитного поля, могут генерировать вращающееся магнитное поле, зависящее от величины и направления электрических токов, подаваемых в каждую катушечную секцию, и могут вызывать прецессию капсульного эндоскопа с использованием вращающегося магнитного поля, и это подробно описано ниже.
На фиг. 3 представлен предпочтительный пример второго узла катушек индуктивности, который может генерировать градиентное магнитное поле, и второй узел катушек индуктивности образован катушками индуктивности, которые могут генерировать градиентное магнитное поле в направлении одной оси.
Пара из двух катушек индуктивности, которые расположены параллельно, образует узел катушек индуктивности для генерации градиентного магнитного поля. Когда направления электрических токов, подаваемых в две катушки индуктивности, взаимно противоположны, генерируется градиентное магнитное поле. Настоящее изобретение предусматривает применение во втором узле катушек индуктивности, предпочтительно, катушек Максвелла.
Как показано на фиг. 3, второй узел 120 катушек индуктивности имеет катушки 121 Максвелла, и катушки 121 Максвелла окружают первый узел 110 катушек индуктивности.
В направлении центральной оси катушек 121 Максвелла создается градиентное магнитное поле, и в центральной части создается градиентное магнитное поле, которое имеет приблизительно линейный уклон.
Второй узел 120 катушек индуктивности имеет часть 130 для приведения в движение катушек индуктивности, расположенную как механическая конструкция, которая способна приводить в движение в трехмерном пространстве при размещении в центре первого узла 110 катушек индуктивности.
Часть 130 для приведения в движение катушек индуктивности может вызывать вращение второго узла 120 катушек индуктивности в двух определенных направлениях α и β и, следовательно, может регулировать направление градиентного магнитного поля, генерируемого вторым узлом 120 катушек индуктивности, с заданием произвольно выбираемого направления.
В частности, во втором узле 120 катушек индуктивности, который создает движущую силу для поступательного перемещения капсульного эндоскопа, применяется только одна катушечная конструкция, и направление градиентного магнитного поля может регулироваться с помощью части 130 для приведения в движение катушек индуктивности, которая может вызывать вращение в трехмерном пространстве второго узла 120 катушек индуктивности, тем самым настоящее изобретение позволяет упростить в целом конструкцию системы управления катушками индуктивности, с помощью которой осуществляется управление капсульным эндоскопом.
Как видно из фиг. 3, часть 130 для приведения в движение катушек индуктивности включает в себя: вертикальную стойку 131, которая зафиксирована в вертикальном положении на основании; поворотную консоль 132, которая расположена горизонтально на вертикальной стойке 131 с возможностью вращения; и подвижное плечо 133, которое фиксирует и поддерживает второй узел 120 катушек индуктивности и является поддерживаемым на переднем конце поворотной консоли 132 с возможностью перемещения в вертикальном направлении.
На поворотной консоли 132, которая имеет возможность поворота на вертикальной стойке 131, и подвижном плече 133, которое является подвижным в вертикальном направлении на переднем конце поворотной консоли 132, установлены приводы, такие как двигатели, в результате чего настоящее изобретение обеспечивает точное управление с помощью электронных, гидравлических или пневматических сигналов, поступающих извне.
Предпочтительно подвижное плечо 133 имеет форму дуги с соответствующим радиусом кривизны, который обеспечивает возможность вращения второго узла 120 катушек индуктивности в трехмерном пространстве относительно центра второго узла 120 катушек индуктивности, который совпадает с центром первого узла катушек индуктивности и представляет собой мнимую ось вращения.
Как описано выше, часть 130 для приведения в движение катушек индуктивности может обеспечивать вращение в трехмерном пространстве, потому что второй узел 120 катушек индуктивности может осуществлять двухосное вращение. Соответственно, направление градиентного магнитного поля второго узла 120 катушек индуктивности может регулироваться произвольным образом.
В данном варианте осуществления изобретения часть для приведения в движение катушек индуктивности имеет конструкцию универсального шарнира, способную совершать двухосное вращение, но настоящее изобретение не ограничивается вышеуказанным и может предусматривать возможность применения различных механических устройств в пределах объема изобретения в том плане, что второй узел 120 катушек индуктивности может совершать вращательное движение в трехмерном пространстве подобно параллельному механизму (платформе Стюарта) или руке робота.
На фиг. 4 показана структурная схема капсульного эндоскопа. Капсульный эндоскоп 300 имеет корпус 301, который определяет внешний вид, и постоянный магнит 310, модуль 320 камеры, модуль 330 передачи данных и модуль 340 электропитания, которые могут быть размещены в корпусе 301.
Постоянный магнит 310 создает намагниченность в произвольном направлении и создает силу приведения в движение капсульного эндоскопа 300 за счет взаимодействия с внешним магнитным полем.
Модуль 320 камеры служит для получения графической информации и может быть зафиксирован и установлен на передней поверхности, задней поверхности или боковой поверхности корпуса 301. При этом, для получения точной графической информации внутри живого организма посредством модуля 320 камеры, может быть дополнительно предусмотрено наличие осветительного устройства.
Модуль 330 передачи данных служит для передачи к наружной стороне графической информации, полученной от модуля 320 камеры.
Модуль 340 электропитания подводит мощность для приведения в действие, необходимую для осветительного устройства, и такой модуль 340 электропитания может быть представлен батареей.
На фиг. 5 схематически показан внешний вид капсульного эндоскопа. Капсульный эндоскоп имеет приближенно удлиненную цилиндрическую форму и имеет наклон с фиксированным углом δ в продольном направлении v и направление М вектора намагниченности. Предпочтительно, направление М вектора намагниченности капсульного эндоскопа 300 образует острый угол (0<δ<90°) с продольным направлением v.
Как будет более подробно описано ниже, в случае совпадения направления вектора намагниченности с продольным направлением прецессия капсульного эндоскопа под действием внешнего вращающегося поля не происходит. В случае, если направление вектора намагниченности перпендикулярно к продольному направлению, капсульный эндоскоп может совершать прецессию только в стабилизированном положении и не может совершать поступательное движение под действием внешнего градиентного магнитного поля.
На фиг. 6(a) и 6(b) представлен пример выполнения капсульного эндоскопа с намагниченностью в произвольном направлении, и в капсульном эндоскопе могут применяться два постоянных магнита 311 и 312, расположенных под прямым углом друг к другу.
Как показано на фиг. 6(a), капсульный эндоскоп 300 имеет векторы M1 и M2 намагниченности и содержит два постоянных магнита 311 и 312, расположенных под прямым углом друг к другу. Такое расположение постоянных магнитов определено двумя векторами M1 и M2 намагниченности, которые образуют вектор М намагниченности, образующий постоянный угол относительно продольного направления.
Как видно из фиг. 1, блок 200 управления содержит управляющую часть 220, которая регулирует величину и направление электрических токов, подаваемых в первый и второй узлы 110 и 120 катушек индуктивности части 100 для генерации магнитного поля, чтобы управлять действием капсульного эндоскопа 300. В данном случае управляющая часть 220 управляет действием части 130 для приведения в движение катушек индуктивности таким образом, что регулирует направление градиентного магнитного поля второго узла 120 катушек индуктивности.
Кроме того, блок 200 управления содержит приемную часть 210, которая принимает сигнал изображения, переданный от капсульного эндоскопа 300, и часть 230 для подачи электропитания, предназначенную для подведения рабочей мощности к блоку 200 управления.
В данном варианте осуществления изобретения управление первым и вторым узлами 110 и 120 катушек индуктивности, а также частью 130 для приведения в движение катушек индуктивности осуществляется от одной управляющей части 220, но может осуществляться от дополнительных специализированных модулей управления соответственно скоростям или свойствам по обработке данных.
В описании данного варианта осуществления изобретения это детально не оговорено, но блок управления может дополнительно содержать известные периферийные устройства, такие, как например устройство для отслеживания положения капсульного эндоскопа, которое может отслеживать положение капсульного эндоскопа с использованием рентгеновских лучей, дисплей для вывода графической информации, поступающей на его вход от приемной части 210, или другие периферийные устройства.
В капсульной эндоскопической системе, предлагаемой согласно настоящему изобретению, капсульный эндоскоп 300 под действием вращающегося магнитного поля, генерируемого зафиксированным первый узлом 110 катушек индуктивности, перемещается, совершая при этом прецессию и движение по спиральной траектории вдоль трубчатого органа под действием градиентного магнитного поля, генерируемого вторым узлом 120 катушек индуктивности, и в процессе его перемещения получает необходимую графическую информацию. Ниже подробно описана работа капсульной эндоскопической системы.
В данном варианте осуществления изобретения первый узел 110 катушек индуктивности имеет катушки Гельмгольца, расположенные по трем осям, которые образуют друг с другом прямые углы, и второй узел 120 катушек индуктивности имеет катушки Максвелла.
Как показано на фиг. 7, осевое направление капсульного эндоскопа имеет обозначение v. Когда с помощью расположенных по оси v катушек Максвелла генерируется градиентное магнитное поле, генерируются магнитное поле, имеющее наклон величиной g в направлении оси v, и магнитное поле, имеющее наклон величиной -0,5g в радиальном направлении.
В данном случае в капсульном эндоскопе магнитную силу, создаваемую градиентным магнитным полем, и величину магнитной силы получают по следующей [математической формуле 1].
[Математическая формула 1]
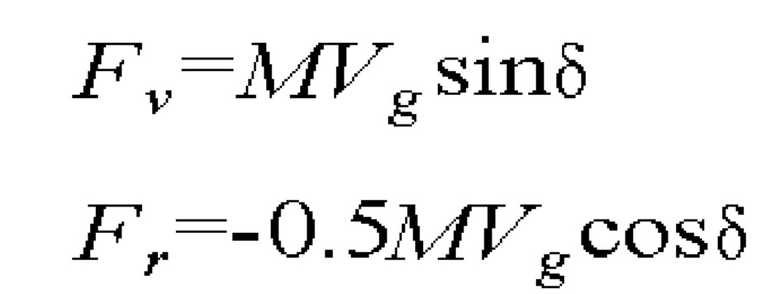
В математической формуле 1: M – намагниченность магнита, содержащегося в капсульном эндоскопе, V – объем магнита, g – наклон, создаваемый катушками Максвелла, и δ – угол между аксиальным вектором v и намагниченностью M.
Как показано на фиг. 7, капсульный эндоскоп в таком состоянии совершает поступательное движение в диагональном направлении, потому что магнитная сила F, образующая постоянный угол с осью v в плоскости v-r, и направление действия силы (направление перемещения) будут изменяться в соответствии с направлением вектора намагниченности посредством расположения магнитов капсульного эндоскопа, а именно на величину δ.
Далее, как видно из фиг. 8, для того, чтобы вызвать прецессию в направлении вектора намагниченности, который расположен под углом δ, так как центральная ось капсульного эндоскопа находится на оси v, необходимо надлежащим образом определить направление и величину магнитного поля катушек Гельмгольца для генерации вращающегося магнитного поля.
На фиг. 8 v – центральная ось вращения, P – вектор нормали (в плоскости v-z) к центральной оси вращения, φ – угол между вектором v и плоскостью x-y, когда вектор v проектируется на плоскость x-y, и θ – угол между вектором v и осью x, когда вектор v проектируется на плоскость x-y.
Как видно из фиг. 8, направление вектора намагниченности капсульного эндоскопа вращается относительно оси v, и когда электрические токи подаются в катушки Максвелла, расположенные по оси v, капсульный эндоскоп создает магнитную силу в направлении оси v и магнитную силу в направлении оси r (см. фиг. 7) одновременно. Под действием результирующей силы двух магнитных сил капсульный эндоскоп может совершать движение по спиральной траектории посредством вращения и поступательного движения по диагонали.
При этом, для того, чтобы вызвать движение капсульного эндоскопа по спиральной траектории вдоль трубчатого органа в трехмерном пространстве, должны удовлетворяться следующие требования.
Во-первых, как видно из фиг. 8, магнитное поле, которое должно генерироваться каждой катушкой Гельмгольца для прецессии капсульного эндоскопа, может быть выражено следующей [математической формулой 2].
[Математическая формула 2]
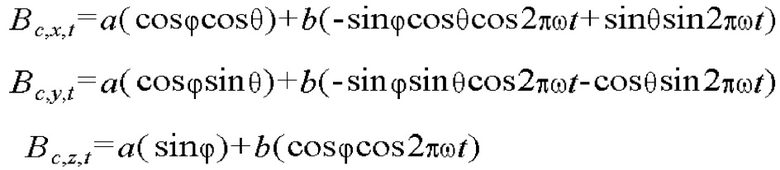
В математической формуле 2: a и b - это Mcosδ и Msinδ, и ω обозначает частоты вращения.
Далее, ось v и катушки Максвелла должны быть согласованы друг с другом. Когда ось v и катушки Максвелла согласованы друг с другом по направлению и катушки Максвелла согласованы друг с другом по направлению, капсульный эндоскоп может с легкостью совершать движение по спиральной траектории лишь за счет регулирования величины и направления электрических токов, подаваемых в катушки Максвелла.
На фиг. 9 представлен фотоснимок, демонстрирующий пример действия капсульной эндоскопической системы, предлагаемой согласно настоящему изобретению. На фиг. 9 постоянные магниты контактируют с поверхностью стенок стеклянной трубки в результате действия вращающегося магнитного поля и градиентного магнитного поля, генерируемых тремя парами катушек Гельмгольца и одной парой катушек Максвелла таким образом, что они вызывают движение по спирали в вертикальном направлении.
Специалисту в данной области техники должно быть понятно, что иллюстративные варианты осуществления изобретения не ограничиваются раскрытыми в данном описании изобретения частными формами исполнения и допускают внесение в них изменений, дополнений и использование эквивалентных решений, не выходящих за пределы сущности и объема настоящего изобретения, которые определяются прилагаемой формулой изобретения.
Группа изобретений относится к медицине. Система управления капсульным эндоскопом содержит: первый узел катушек индуктивности, имеющий катушечные секции, которые прикреплены к трем осям, расположенным под прямым углом друг к другу, и генерируют магнитные поля соответственно в осевых направлениях; второй узел катушек индуктивности, расположенный таким образом, чтобы генерировать градиентное магнитное поле в любом направлении относительно магнитного поля, генерируемого первым узлом катушек индуктивности; блок для приведения в движение катушек индуктивности, предназначенный для приведения в движение второго узла катушек индуктивности для регулировки ориентации градиентного магнитного поля; блок управления, содержащий приемную часть, принимающую сигнал изображения, переданный от капсульного эндоскопа, и управляющую часть, регулирующую электрические токи, подаваемые в первый и второй узлы катушек индуктивности, для регулирования генерируемого магнитного поля и управления блоком для приведения в движение катушек индуктивности; и капсульный эндоскоп, содержащий два постоянных магнита, расположенных под прямым углом друг к другу и создающих намагниченность с вектором намагниченности, расположенным относительно продольного направления корпуса капсульного эндоскопа под углом в диапазоне острых углов (0<δ<90°). Причем капсульный эндоскоп совершает прецессию под действием вращающегося магнитного поля, генерируемого первым узлом катушек индуктивности, и движение по спиральной траектории вдоль трубчатого органа под действием градиентного магнитного поля, генерируемого вторым узлом катушек индуктивности, действующих совместно с указанной намагниченностью. Капсульная эндоскопическая система содержит систему и модуль камеры для захвата изображения и передачи изображения к наружной стороне. Капсульный эндоскоп способен совершать движение по спиральной траектории вдоль внутренней стороны трубчатого органа под действием вращающегося магнитного поля и градиентного магнитного поля, генерируемых с наружной стороны. Применение данной группы изобретений позволит повысить точность диагностики состояния стенки трубчатого органа. 3 н. и 3 з.п. ф-лы, 9 ил.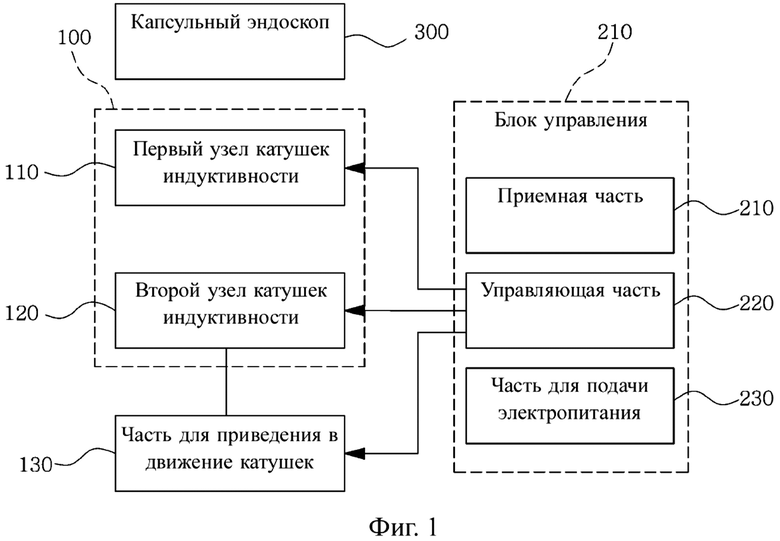
1. Система управления капсульным эндоскопом, содержащая:
первый узел катушек индуктивности, имеющий катушечные секции, которые прикреплены к трем осям, расположенным под прямым углом друг к другу, и генерируют магнитные поля соответственно в осевых направлениях;
второй узел катушек индуктивности, расположенный таким образом, чтобы генерировать градиентное магнитное поле в любом направлении относительно магнитного поля, генерируемого первым узлом катушек индуктивности;
блок для приведения в движение катушек индуктивности, предназначенный для приведения в движение второго узла катушек индуктивности для регулировки ориентации градиентного магнитного поля;
блок управления, содержащий приемную часть, принимающую сигнал изображения, переданный от капсульного эндоскопа, и управляющую часть, регулирующую электрические токи, подаваемые в первый и второй узлы катушек индуктивности, для регулирования генерируемого магнитного поля и управления блоком для приведения в движение катушек индуктивности; и
капсульный эндоскоп, содержащий два постоянных магнита, расположенных под прямым углом друг к другу и создающих намагниченность с вектором намагниченности, расположенным относительно продольного направления корпуса капсульного эндоскопа под углом в диапазоне острых углов (0<δ<90°),
причем капсульный эндоскоп совершает прецессию под действием вращающегося магнитного поля, генерируемого первым узлом катушек индуктивности, и движение по спиральной траектории вдоль трубчатого органа под действием градиентного магнитного поля, генерируемого вторым узлом катушек индуктивности, действующих совместно с указанной намагниченностью.
2. Система управления по п. 1, в которой блок для приведения в движение катушек индуктивности управляет вторым узлом катушек индуктивности, таким образом вызывая его вращение в трехмерном пространстве посредством независимых двухосных вращений.
3. Система управления по п. 1, в которой каждая катушечная секция первого узла катушек индуктивности содержит катушку Гельмгольца.
4. Система управления по п. 1, в которой второй узел катушек индуктивности содержит катушку Максвелла.
5. Капсульная эндоскопическая система, содержащая систему управления по одному из пп. 1-4, причем капсульная эндоскопическая система содержит модуль камеры для захвата изображения и передачи изображения к наружной стороне.
6. Капсульный эндоскоп для использования в системе управления по пп. 1-4, способный совершать движение по спиральной траектории вдоль внутренней стороны трубчатого органа под действием вращающегося магнитного поля и градиентного магнитного поля, генерируемых с наружной стороны, причем капсульный эндоскоп содержит два постоянных магнита, расположенных под прямым углом друг к другу и создающих намагниченность с вектором намагниченности, расположенным под углом относительно продольного направления корпуса эндоскопа в диапазоне острых углов (0<δ<90°), и способен захватывать изображение и передавать изображение к наружной стороне.
| US 20110316656 A1, 29.12.2011 | |||
| WO 2012090197 A1, 05.07.2012 | |||
| US 2008272873 A1, 06.11.2008 | |||
| Водозаборное сооружение | 1948 |
|
SU80326A1 |

