Изобретение относится к средствам диагностики водной поверхности и может быть использовано для исследования пространственного распределения по дальности и азимутальному углу скорости ветра над водной поверхностью (так называемого приповерхностного ветра).
Как известно, величина приповерхностного ветра определяет интенсивность волнения, которое играет важнейшую роль во взаимодействии атмосферы и моря. Как правило, скорость ветра над морем не является постоянной величиной. Скорость ветра характеризуется некоторой средней величиной, на которую "накладываются" флуктуации скорости ветра. Средняя скорость ветра может характеризоваться крупномасштабной изменчивостью, обусловленной, например, циклоническими процессами в атмосфере. Условно можно разделить ветер на стационарный и нестационарный. Стационарный ветер характеризуется относительно небольшими флуктуациями скорости ветра. Флуктуации скорости ветра могут быть значительными при так называемых нестационарных или порывистых ветрах, например, при катабатическом ветре (нисходящий ветер с гор, обусловленный, в частности, температурной разницей между воздухом в горах и морской поверхностью). Локальное увеличение скорости ветра известно под названием ветровых порывов (или шквалов). Разработка способов регистрации порывистого (или шквального) ветра над морем является одной из основных задач океанографии. Эти ветра могут быть обусловлены как температурной разницей между воздухом в горах и морской поверхностью, так и более крупномасштабными циклоническими процессами. Такие ветра являются очень опасными для судоходства, как например, известная бора, возникающая в Новороссийске в основном в осенние и зимние месяцы.
Известны контактные методы регистрации скорости ветра в "точке" с помощью "чашечных" анемометров или акустических датчиков. Для измерения пространственного распределения скорости ветра необходимо создавать пространственные решетки измерителей скорости ветра. Однако создание такого "поля" измерителей скорости ветра является чрезвычайно сложной задачей в силу того, что ветровые поля обладают сложной пространственно-временной структурой с пространственными масштабами от метров до километров. Размещение измерителей на море требует установки специальных буев, такая система не обладает мобильностью: ее сложно переместить в другое место.
Известны способы регистрации скорости ветра с помощью скаттерометров, работающих в радиодиапазоне электромагнитных волн. Скаттерометры излучают микроволновые импульсы в направлении океанской поверхности и измеряют мощность отраженного сигнала. Принцип регистрации скорости ветра основан на зависимости мощности отраженных поверхностью моря сигналов скаттерометров от скорости и направления ветра. Эта зависимость, или так называемая модельная функция, должна быть заранее известна [см, например, Figa, J., and Stoffelen, A., "On the Assimilation of Ku-band Scatterometer Winds for Weather Analysis and Forecasting", IEEE Trans, on Geoscience and Rem. Sens. 38 (4) pp. 1893-1902, 2000]. Для регистрации скорости и направления ветра на больших площадях используют спутниковые сканирующие скаттерометры. Для определения направления ветра используют угловую зависимость сигналов скаттерометра относительно направления ветра при круговом сканировании антенны. Скаттерометры обладают широкой полосой обзора, но имеют низкое пространственное и временное разрешение, так как они пролетают над одним и тем же участком поверхности моря только через оборот спутника вокруг Земли.
Существуют также способы определения скорости ветра оптическими средствами. Известен способ определения скорости ветра над морем по изображению солнечной дорожки [Naoto Ebuchi and Shoichi Kizu. Probability Distribution of Surface Wave Slope Derived Using Sun Glitter Images from Geostationary Meteorological Satellite and Surface Vector Winds from Scatterometers. Journal of Oceanography, 2002. Vol. 58, pp. 477-486]. Здесь по солнечной дорожке определяют дисперсия уклонов волн, а затем используют связь между дисперсией уклонов и скоростью ветра. Такой способ определения скорости ветра используют при анализе изображений солнечной дорожки, полученных со спутников. Этот способ имеет недостатки, связанные с цикличностью пролета спутника над определенным местом, с наличием облачности, обуславливающим невозможность получения изображения. Помимо того, что этот способ применим только в зоне солнечной дорожки, способ обладает низким пространственным разрешением, так как для получения хорошей точности необходимо применять соответствующие масштабы усреднения солнечных бликов.
Известен также способ определения скорости ветра по перепаду яркости на горизонте [Бялко А.В., Пелевин В.Н. О контрасте яркости неба и моря // Изв. АН СССР, Физика атмосферы и океана, 1975. Т. 11, №7, С. 755-756]. Величина перепада яркости определяется дисперсией уклонов волн. Однако этот способ позволяет оценить скорость ветра только около горизонта.
Все перечисленные оптические способы не дают возможности определить характеристики ветра с хорошим пространственно-временным разрешением, а также обладают низкой помехоустойчивостью (мешает облачный покров), поскольку в них для определения скорости ветра используется только область солнечных бликов.
Наиболее близким по технической сущности к разработанному способу выбран способ, описанный в заявке на изобретение «Способ определения скорости ветра над водной поверхностью» (№2015153001 RU: МПК-2015.01: G01C 13/00, G01P 5/00 /Баханов В.В., Зуйкова Э.М., Лучинин А.Г., Репина И.А., Титов В.И.; заявитель ИПФ РАН - дата подачи заявки 10.12.2015). В заявке предложен способ определения скорости ветра над водной поверхностью, в котором получают два пространственно-временных изображения водной поверхности из оптических изображений, полученных с помощью двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, причем регистрируют оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют полученные изображения по дальности, определяют направления распространения ветровых порывов относительно направления визирования линеек ПЗС-фотодиодов (определяют углы между направлениями визирования линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов) и скорость ветровых порывов по углам наклона полос ветровых порывов на пространственно-временных изображениях и известному углу между направлениями визирования обеих линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в направлении визирования в каждой точке водной поверхности получают решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом углового распределения яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования сравнение измеренной яркости водной поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости водной поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде с помощью видеокамеры синхронно с регистрацией пространственно-временных изображений.
Недостатками прототипа являются невысокая точность измерений для общего случая, во-первых, за счет того, что не учитывается поляризация света под малыми углами наблюдения (что не только вносит погрешность в измерения, но и ограничивает возможность применения способа только случаем неполяризованного света - для неба, закрытого облаками), и во-вторых, за счет плохого разрешения скорости ветра по азимутальному углу (высокая вероятность не выявить возможные вариации ветровых возмущений между направлениями визирования двух линеек ПЗС-фотодиодов при большом угле между этими направлениями).
Как показали модельные исследования, точность определения скорости приповерхностного ветра определяется точностью регистрации углового распределения яркости неба. Например, погрешность определения угловой зависимости яркости неба в 10% определяет погрешность определения скорости ветра в 10%. Использование видеокамеры для регистрации углового распределения яркости неба, как в прототипе, не всегда может обеспечить достаточную точность регистрации, особенно под малыми углами наблюдения. В прототипе приведен пример восстановления скорости ветра при освещении поверхности моря небом, полностью покрытом тучами. Излучение такого неба не поляризовано и для его регистрации достаточно обычной видеокамеры, которая регистрирует неполяризованный свет. При ясном небе степень поляризации света неба может достигать 20-30%. Таким образом, для более общего случая под малыми углами наблюдения необходим учет поляризации света из-за различия коэффициентов отражения Френеля для вертикальной и горизонтальной поляризации света, т.е. для точности определения скорости приповерхностного ветра необходимо различать угловую зависимость яркости неба для горизонтально и вертикально поляризованного света.
Кроме того, в прототипе используют две линейки ПЗС-фотодиодов с различным направлением визирования (в прототипе приведен пример, когда угол между направлениями визирования линеек составлял 60°). В этом случае получают пространственное распределение по дальности скорости ветра над водной поверхностью только для двух направлений, что может оказаться недостаточным для некоторых задач. Например, между направлениями визирования двух линеек ПЗС-фотодиодов на поверхности моря могут возникнуть вариаций ветровых возмущений (например, область пониженной скорости ветра или область изменения направления ветровых порывов), которая в этом случае не будет обнаружена. В этом случае необходимо повысить разрешение по азимутальному углу пространственного распределения скорости ветра.
Задачей, решаемой настоящим изобретением, является разработка способа определения пространственного распределения по дальности скорости ветра над водной поверхностью по пространственно-временным изображениям водной поверхности при рассеянном небесном освещении (вне зоны солнечных бликов), полученным как с движущегося носителя, так и с неподвижного основания, который обладает более высокой точностью по сравнению с прототипом.
Технический результат, заключающийся в повышении точности определения пространственного распределения по дальности скорости ветра над водной поверхностью, достигается тем, что получают не менее чем два пространственно-временных изображения водной поверхности из оптических изображений, полученных с помощью не менее чем двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, причем каждая линейка ПЗС-фотодиодов регистрирует одномерные оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют по дальности два полученных с соседних линеек ПЗС-фотодиодов изображения по дальности, определяют направления распространения ветровых порывов (определяют углы между направлениями визирования соседних линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов между соседними линейками ПЗС-фотодиодов) и скорость ветровых порывов для соседних линеек ПЗС-фотодиодов по углам наклона полос ветровых порывов на пространственно-временных изображениях, полученных соседними линейками ПЗС-фотодиодов, и известному углу между направлениями визирования соседних линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в направлении визирования в каждой точке водной поверхности получают решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом углового распределения яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов сравнение измеренной яркости водной поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости водной поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде.
Новым в разработанным способе является то, что для измерений используют более двух оптических систем на основе линеек ПЗС-фотодиодов, синхронизированных между собой единым задающим генератором и установленных с разными направлениями визирования в заданном угловом секторе, определяемом азимутальным углом между крайними линейками ПЗС-фотодиодов, и регистрацию углового распределения яркости неба и окологоризонтного участка водной поверхности в цифровом виде осуществляют в случае необходимости достижения высокого пространственного разрешения на водной поверхности в направлении визирования линеек ПЗС-фотодиодов либо с помощью двух взаимно откалиброванных видеокамер, на объективы которых установлены поляроиды с вертикально и горизонтально расположенными осями пропускания, либо с помощью одной видеокамеры, на объектив которой, как и на объективы линеек ПЗС-фотодиодов, установлены поляроиды или с вертикально, или с горизонтально расположенной осью пропускания, используя при этом в линейках ПЗС-фотодиодов длиннофокусные узкоугольные объективы, а в случае необходимости достижения широкой полосы обзора - с помощью самих линеек ПЗС-фотодиодов с установленными на них широкоугольными объективами и установленными на объективах поляроидами с вертикально или горизонтально расположенной осью пропускания.
Способ поясняется следующими чертежами.
Фиг. 1 - схема наблюдения водной поверхности с помощью четырех оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования.
Фиг. 2 - пространственно-временные изображения водной поверхности, демонстрирующие проявления катабатического ветра.
Фиг. 3 - распределение скорости ветра в координатах дальность - время в условной полутоновой шкале (врезка справа на фиг. 3, скорость ветра в м/с).
Фиг. 4 - зависимость средней по времени скорости ветра от расстояния от берега моря, определенная по двум пространственно-временным изображениям поверхности моря, приведенным на Фиг. 2.
Способ осуществляют следующим образом.
Для повышения точности определения пространственной структуры приводного ветра в предлагаемом способе используют несколько (более двух) оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования в заданном угловом секторе, определяемом азимутальным углом между крайними линейками ПЗС-фотодиодов. В прототипе используются две линейки с углом между направлениями визирования 60° Направление ветровых порывов вычисляется в предположении, что фронты ветровых порывов прямолинейны. Однако, если фронты ветровых порывов не прямолинейны, такие расчеты могут вносить ошибки. Повысить точность вычисления параметров ветровых полей можно путем уменьшения угла между направлениями визирования линеек ПЗС-фотодиодов. Однако в этом случае теряется информация о ветре в других направлениях визирования. Выход заключается в увеличении количества линеек ПЗС-фотодиодов при уменьшении углов визирования между соседними линейками ПЗС-фотодиодов, причем все линейки ПЗС-фотодиодов должны быть синхронизированы между собой единым задающим генератором.
В качестве примера далее рассмотрено использование четырех линеек ПЗС-фотодиодов с направлениями визирования, следующими через 20° в угловом секторе в 60°. Данный пример иллюстрирует предлагаемое изобретение, но не ограничивает его. На рис. 1 приведена схема наблюдения водной поверхности с помощью четырех оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, обозначенных цифрами от 1 до 4. Линейки ПЗС-фотодиодов установлены на берегу или морской платформе на некоторой высоте над водной поверхностью. Здесь орты l1-l4 обозначают направления визирования линеек ПЗС-фотодиодов на водной поверхности. Углы Δϕ - углы между направлениями визирования соседних линеек ПЗС-фотодиодов на водной поверхности. При вычислении направления и скорости ветровых порывов и распределения скорости ветра в направлении визирования линеек ПЗС-фотодиодов перебирают последовательно соседние линейки ПЗС-фотодиодов под номерами 1 и 2, потом 2 и 3, потом 3 и 4. Для каждой пары соседних линеек ПЗС-фотодиодов формируют пространственно-временные изображения водной поверхности так же, как и для двух линеек ПЗС-фотодиодов в прототипе. На фиг. 1 проиллюстрирован также пример определения направления ветровых порывов для линеек ПЗС-фотодиодов под номерами 2 и 3. Здесь прерывистыми черточками обозначены возмущения водной поверхности под действиями ветровых порывов. В общем случае волновые фронты могут быть не прямолинейными, но предполагается, что в угловом интервале между соседними линейками ПЗС-фотодиодов фронты прямолинейны. Черточки выстраиваются в полосы, соответствующие движущимся фронтам ветровых порывов. Здесь ϕ1 и ϕ2 - углы между направлением нормальной скорости ветровых порывов и направлениями наблюдения линеек ПЗС-фотодиодов под номерами 2 и 3.
На фиг. 2 приведены пространственно-временные изображения проявлений катабатического ветра, полученные с берега с двух установленных рядом оптических систем на основе линеек ПЗС-фотодиодов 2 и 3 с различным направлением визирования. Изображения «состыкованы» началами по дальности. По вертикали отложено расстояние от оптических приборов в метрах, по горизонтали - время. Черное море, оптических систем на основе линеек ПЗС-фотодиодов 100 м над уровнем моря. Небо - сплошные тучи.
На фиг. 2 темные полосы - области увеличения скорости ветра (или области ветровых порывов), яркие полосы - области «выглаживания» волнения из-за уменьшения скорости ветра. Ветровые порывы проявляются на пространственно-временных изображениях в виде полос, угол наклона которых определяется их скоростью распространения. Длина полос определяется временем существования ветровых порывов. Ветровые порывы можно идентифицировать по их пространственной структуре и по скоростям распространения, которые существенно превышают скорость поверхностных волн. По двум пространственно-временным изображениям определяют скорость и направление распространения ветровых порывов, при этом эти изображения должны быть синхронизированы между собой (должны регистрироваться одновременно для обоих направлений визирования).
На фиг. 2 проведены линии OA и ОВ, параллельные фронтам порывов на двух пространственно-временных изображениях водной поверхности с разными направлениями визирования пары соседних линеек ПЗС-фотодиодов под номерами 2 и 3. Углы α1 и α2 - углы между линиями OA и ОВ и горизонтальной осью - осью времени. Тангенсы этих углов tg α1 и tg α2 позволяют определить ориентацию фронтов ветровых порывов, а также знак и направление их нормальной скорости (скорости распространения ветровых порывов).
В предположении, что ориентация полос ветровых порывов является прямолинейной и их скорость постоянна в пределах угла Δϕ, для двух пространственно-временных изображений с направлениями визирования l2 и l3 имеем систему двух уравнений:

tg α2=v/cos ϕ2,
где v - модуль скорости нормальной скорости ветровых порывов между линейками ПЗС-фотодиодов 2 и 3. При этом ϕ2=Δϕ-ϕ1, где Δϕ - азимутальный угол между направлениями визирования линеек ПЗС-фотодиодов:

Уравнения (1) и (2) при известном Δϕ позволяют определить углы между направлением движения фронта полосы ветрового порыва и направлениями визирования линеек ПЗС-фотодиодов и скорость ветровых порывов для пары линеек ПЗС-фотодиодов 2 и 3:

ϕ2=Δϕ-ϕ1,
v=tg α1 cos ϕ1.
Этот расчеты применимы и к случаю проведения измерений с подвижного носителя, только в формулах (1), (2) необходимо будет учесть скорость носителя.
В нашем примере аналогично осуществляют расчеты и для оставшихся пар линеек ПЗС-фотодиодов под номерами 1 и 2, 3 и 4.
Затем определяют распределение дисперсии уклонов волн в каждой точке водной поверхности в направлениях визирования линеек ПЗС-фотодиодов для каждой пары соседних линеек ПЗС-фотодиодов, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования сравнение измеренной яркости поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде.
Под яркостью водной поверхности будем понимать локально усредненную регистрируемую яркость (в каждой точке водной поверхности в направлении визирования). Как правило, масштабы усреднения яркости определяются масштабами разрешения полученного одномерного изображения водной поверхности.
Модельная яркость водной поверхности для случая неполяризованного излучения неба с учетом затенения будет определяться выражением:

где  - вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wv(η) - распределение видимых уклонов водной поверхности, Is - неусредненная яркость водной поверхности, равная:
- вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wv(η) - распределение видимых уклонов водной поверхности, Is - неусредненная яркость водной поверхности, равная:
Is=FIsky.
F - коэффициент отражения Френеля, Isky - угловое распределение яркости неба. Выражение для модельной яркости водной поверхности написано для случая неполяризованного излучения неба. Модельная яркость водной поверхности под малыми углами наблюдения (угол между направлением визирования и водной поверхностью) вне зоны солнечных бликов будет определяться дисперсией уклонов волн в направлении визирования  .
.
Дисперсия уклонов волн входит в выражение для распределения видимых уклонов водной поверхности Wv(η).
Для определения дисперсии необходимо решить ("обратить") интегральное уравнение (3) относительно дисперсии уклонов волн. В общем случае это уравнение не имеет аналитического решения и единственным способом решения является вычислительное графическое решение. В выражение (3) входят распределения неусредненной яркости водной поверхности и углового распределения яркости неба, а аппаратура регистрирует электрические сигналы. Обычно в таких случаях используют калибровку аппаратуры по источнику эталонного излучения. В предлагаемом способе переходят в выражении (3) к безразмерному отношению яркостей: нормируют (и модельную, и измеренную) яркость водной поверхности и угловое распределение яркости неба на яркость неба на горизонте.
Для этого в случае использования в формуле (3) выражения для углового распределение яркости неба в аналитической форме нормируют это выражение на аналитическое выражение яркости неба на горизонте.
Либо непосредственно регистрируют угловое распределение яркости неба с "захватом" горизонта и окологоризонтного участка водной поверхности в цифровом виде. Тем самым существенно упрощается аппаратура (отсутствует эталонный источник) и компенсируются температурные и другие возможные "уходы" коэффициента усиления аппаратуры, что ведет к повышению точности предлагаемого способа.
Модельная яркость водной поверхности, нормированная на яркость неба у горизонта, для неба, полностью покрытого тучами, будет определяться безразмерным выражением:

где Ih - яркость неба на горизонте.
Однако при визировании поверхности моря под малыми углами наблюдения, что обеспечивает широкую полосу обзора, необходимо учитывать поляризацию света. Световое поле с учетом поляризации описывается 4-х мерным вектором Стокса, где яркость вертикально и горизонтально поляризованного света являются первым и вторым элементами вектора Стокса. Вектор Стокса S отраженного луча будет определяться перемножением матриц:

где P(γ1) и Р(γ2) - матрицы поворота системы координат от системы координат, связанной с нормалью к средней, гладкой поверхности моря, к локальной системе координат, связанной с локальной нормалью к поверхности моря и обратно, матрица Мo - матрица отражения в локальной системе координат, которая для видимого диапазона света имеет следующий вид:

где F1 и F2 - коэффициенты Френеля для горизонтально и вертикально поляризованного излучения. Ss - вектор Стокса излучения неба.
Можно показать, что для взволнованной поверхности моря матрица отражения для морской поверхности будет иметь диагональный вид, то есть горизонтальная и вертикальная поляризации света будут независимы. Для этого уклоны взволнованной поверхности должны быть небольшими, что характерно для моря. Средний квадратичный уклон морской поверхности можно определить по формулам Сох'а и Munk'a (5), связывающим дисперсию уклонов волн со скоростью ветра.
Например, при изменении скорости ветра от 0 до 22 м/с средний квадратичный уклон поверхности моря будет меняться от 0 до 0,27 рад или примерно до 30°. Формула для яркости поверхности моря (3) будет иметь следующий вид:

где неусредненная яркость поверхности моря

Isky1 и Isky2 - интенсивности горизонтально и вертикально поляризованного излучения неба. Формулы (8), (9) описывают яркость водной поверхности при регистрации линейками ПЗС-фотодиодов неполяризованного излучения.
Если на линейке ПЗС-фотодиодов установлен поляроид с вертикально или горизонтально ориентированной осью, то сигналы, регистрируемые линейками ПЗС-фотодиодов с установленными на объективы поляроидами будут пропорциональны яркости горизонтально или вертикально поляризованного излучения водной поверхности I1,2:

Выбор способа регистрации углового распределения яркости неба и окологоризонтного участка водной поверхности в цифровом виде зависит от поставленной задачи: если требуется хорошее пространственное разрешение, то для линеек ПЗС-фотодиодов необходимо использовать длиннофокусные узкоугольные объективы (обладающие узкоугольным полем зрения). В этом случае регистрацию яркости неба и окологоризонтного участка водной поверхности надо вести с помощью видеокамер. Если хорошее разрешение не требуется, а важно иметь широкую полосу обзора, то можно осуществлять измерения с помощью непосредственно самих линеек ПЗС-фотодиодов, оборудованных короткофокусными объективами с большим углом зрения без использования видеокамер.
В предлагаемом способе предусмотрены три варианта регистрации углового распределения яркости неба и окологоризонтного участка водной поверхности в цифровом виде с возможностью учета поляризованности света неба.
В первых двух вариантах для достижения хорошего пространственного разрешения линеек ПЗС-фотодиодов используют длиннофокусные объективы, обладающие узкоугольным полем зрения. Выбор между этими вариантами обусловлен условиями наблюдения.
При рассеянном свете неба (вне зоны солнечных бликов) предпочтительно работать с неполяризованным светом, когда на объективах линеек ПЗС-фотодиодов нет поляроидов. В этом случае получают хорошее отношение сигнал\шум для линеек ПЗС-фотодиодов. В первом варианте при регистрации линейками ПЗС-фотодиодов неполяризованного излучения водной поверхности, для более точного восстановления скорости ветра регистрируют угловое распределение яркости неба и окологоризонтного участка водной поверхности для двух поляризаций (в соответствии с формулами 8, 9). Это осуществляют с помощью двух взаимно откалиброванных видеокамер с установленными на их объективах поляроидами для регистрации яркости вертикально и горизонтально поляризованного света. Видеокамеры устанавливают вместе с линейками ПЗС-фотодиодов, причем угловой размер поля зрения видеокамер больше азимутального угла между крайними линейками ПЗС-фотодиодов, чтобы регистрировать угловое распределение яркости неба и окологоризонтного участка водной поверхности для всех направлений визирования линеек ПЗС-фотодиодов.
В реальных условиях часто приходится вести наблюдение на периферии солнечной дорожки. В этом случае солнечные блики вносят помехи в результаты измерений. Для их подавления во втором варианте на объективы линеек ПЗС-фотодиодов устанавливают одинаковые поляроиды или с горизонтальной, или с вертикальной ориентацией оси пропускания и соответственно регистрируют либо горизонтально, либо вертикально поляризованное излучение водной поверхности (в соответствии с формулами (10)). Тогда для восстановления скорости ветра необходимо регистрировать угловое распределение яркости неба и окологоризонтного участка водной поверхности только одной поляризации. Это делают с помощью одной видеокамеры с установленным на ее объективе поляроидом с такой же ориентацией оси пропускания, как и на объективах линеек ПЗС-фотодиодов.
Первые два варианта дают полосу обзора шириной 200-300 метров в зависимости от степени волнения водной поверхности.
В третьем варианте для обеспечения широкой полосы обзора осуществляют регистрацию углового распределения яркости неба и окологоризонтного участка водной поверхности без использования видеокамер с помощью непосредственно самих линеек ПЗС-фотодиодов, оборудованных широкоугольными объективами (короткофокусными объективами с большим углом зрения), захватывающими при измерении одновременно поверхность моря, горизонт и часть неба в достаточно широком угловом интервале. Угловой интервал регистрируемой части неба должен быть не менее 20-30°, чтобы можно было использовать угловую зависимость яркости неба, зарегистрированную линейкой ПЗС-фотодиодов, для восстановления скорости приповерхностного ветра. В этом случае на объективы линеек ПЗС-фотодиодов устанавливают поляроиды для регистрации яркости вертикально или горизонтально поляризованного света (формулы 10), причем ориентация оси пропускания поляроидов для разных линеек ПЗС-фотодиодов может быть различной. Выбор поляризации зависит от условий освещения. В плохих условиях освещения выбирают ту поляризацию, у которой интенсивность света выше. При слишком ярком освещении выбирают более слабую по интенсивности света поляризацию, чтобы избежать перегрузки фотодиодов.
Третий вариант дает полосу обзора шириной несколько километров.
Как показали измерения, регистрация углового распределения яркости неба и окологоризонтного участка водной поверхности в цифровом виде с возможностью учета поляризованности света неба позволяет повысить точность восстановления скорости ветра над водной поверхностью в направлении визирования до 20-30%. Кроме того, она позволяет осуществлять способ определения скорости ветра над водной поверхностью при широких условиях освещения, в отличие от прототипа, а значит, повысить точность определения скорости ветра.
Распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов (иначе говоря, пространственное распределение дисперсии уклонов волн по дальности) волн определяют путем сравнения модельной нормированной на яркость неба на горизонте яркости водной поверхности и измеренной нормированной на яркость неба на горизонте яркости водной поверхности для каждой точки поверхности. Для каждой точки поверхности в направлении визирования строят зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волн, используя для каждой линейки ПЗС-фотодиодов свое угловое распределение яркости неба, при этом дисперсию уклонов волн меняют в некотором диапазоне значений: например, от 0 до 0,07 (средний квадратичный уклон волн меняется от 0 до  ), что соответствует скорости ветра от 0 м/с до 22 м/с. Полученную зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волнсравнивают с измеренной нормированной яркостью водной поверхности в данной точке поверхности и значение дисперсии уклонов волн, при которой эти яркости совпадают, присваивают этой точке водной поверхности. Путем перебора точек водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов строят распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования. Все это осуществляют одновременно и единым алгоритмом.
), что соответствует скорости ветра от 0 м/с до 22 м/с. Полученную зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волнсравнивают с измеренной нормированной яркостью водной поверхности в данной точке поверхности и значение дисперсии уклонов волн, при которой эти яркости совпадают, присваивают этой точке водной поверхности. Путем перебора точек водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов строят распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования. Все это осуществляют одновременно и единым алгоритмом.
Далее определяют скорость ветра в каждой точке водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов (иначе говоря, пространственное распределение скорости ветра по дальности) из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов.
Пространственное распределение по дальности скорости ветра U в каждой точке водной поверхности в направлении визирования вычисляют по эмпирическим формулам Сох'а и Munk'a, связывающим дисперсию уклонов волн со скоростью ветра:

где σw и σc - средние квадратичные уклоны волн в направлении по ветру и перпендикулярно ветру, U - скорость ветра в м/с на высоте 12,5 м над уровнем моря. Существуют также другие модельные зависимости скорости ветра от дисперсии уклонов волн, которые можно использовать в данном способе. Для определения скорости ветра по формулам (11) необходимо знать направление ветра. Направление ветра определяют по направлению распространения ветровых порывов, совпадающему с направлением скорости ветровых порывов, которое определяется по двум пространственно-временным изображениям морской поверхности, полученным парой соседних линеек ПЗС-фотодиодов с разным направлением визирования.
Так, дисперсия уклонов волн в направлениях визирования линеек ПЗС-фотодиодов с номерами 2 и 3 из нашего примера будет определяться выражением:

где ϕ1 и ϕ2 - углы между направлением ветра и направлениями визирования соседних линеек ПЗС-фотодиодов 2 и 3. Формулы (И) и (12) позволяют определить пространственное распределение по дальности скорости ветра в направлениях визирования линеек соседних линеек ПЗС-фотодиодов:

На фиг. 3 приведены вычисленные по формуле (13) пространственные распределения по дальности скорости ветра над водной поверхностью в координатах дальность - время в условной полутоновой шкале (врезка справа на рис. 3, скорость ветра в м/с) для двух направлений визирования линеек ПЗС-фотодиодов 2 и 3 (верхнее и нижнее изображения). В качестве распределения видимых уклонов водной поверхности Wv(η) использовалась функция Сандерса (Saunders, P.M., "Shadowing of the Ocean and Existence of the Horizon," Journal of Geophysical Research 72, 4643-4650, 1967). Ветровые порывы могут достигать скорости 16-19 м/с.
Скорость ветра в каждой точке поверхности является мгновенной. При усреднении по времени распределения по дальности средней скорости ветра для двух направлений визирования соседних линеек ПЗС-фотодиодов должны совпадать, что должно являться подтверждением хорошей точности определения пространственного распределения по дальности скорости ветра над водной поверхностью предлагаемым способом.
На фиг. 4 приведена зависимость средней по времени скорости ветра от расстояния от берега моря, определенная по двум пространственно-временным изображениям поверхности моря, полученных для двух направлений визирования линеек ПЗС-фотодиодов 2 и 3. Время усреднения составляло 4 мин. Распределения по дальности средних скоростей для двух направлений наблюдения совпадают. Средняя скорость ветра растет до величины порядка 13 м/с; с увеличением расстояния от берега до 1,5-2 км. Далее скорость ветра остается примерно постоянной и начинает уменьшаться после 4 км.
Перебирая попарно данные соседних линеек ПЗС-фотодиодов, можно аналогичным образом получить распределение скорости ветра над водной поверхностью вдоль направления визирования каждой линейки ПЗС-фотодиодов и распределение направления ветровых порывов и скорости ветровых порывов по азимутальному углу.
В общем случае реализации способа количество линеек ПЗС-фотодиодов определяется требованиями к разрешению по азимутальному углу и техническими возможностями измерительной аппаратуры.
Точность вычисления распределения средней скорости ветра по дальности определяется временем усреднения. Время усреднения не может быть сколь угодно большим: оно определяется масштабами стационарности ветра. При небольших временных масштабах изменчивости скорости ветра можно повысить точность измерения средней скорости ветра за счет дополнительного усреднения скорости ветра по направлениям визирования линеек ПЗС-фотодиодов при условии отсутствия дополнительных ветровых возмущений по азимутальному углу.
Как известно, дисперсия флуктуаций суммы нескольких независимых случайных величин уменьшается пропорционально числу этих случайных величин. Таким образом повышается точность определения пространственного распределения по дальности средней по нескольким направлениям скорости ветра над водной поверхностью за счет увеличения количества линеек ПЗС-фотодиодов.
Если невозможно осуществить усреднение, все равно определение скорости ветра над водной поверхностью вдоль направления визирования каждой линейки ПЗС-фотодиодов осуществляется более точно за счет увеличения разрешения по азимутальному углу, что повышает вероятность выявления вариаций ветровых возмущений.
Таким образом, предлагаемый способ позволяет за счет повышения разрешения по азимутальному углу и учета поляризации регистрируемого излучения добиться более высокой точности определения пространственного распределения по дальности скорости ветра над водной поверхностью по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения скорости ветра над водной поверхностью | 2015 |
|
RU2616354C1 |
| Способ определения рельефа уклонов волн морской поверхности по оптическим пространственно-временным изображениям морской поверхности | 2024 |
|
RU2837976C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее оптическим изображениям | 2022 |
|
RU2794871C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОВЕРХНОСТНЫХ ВОЛН ПО ПРОСТРАНСТВЕННО-ВРЕМЕННЫМ ИЗОБРАЖЕНИЯМ ВОДНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2436040C2 |
| Способ определения оптической толщины атмосферы | 2019 |
|
RU2729171C1 |
| Определитель параметров ветра дистанционный пассивный | 2023 |
|
RU2801433C1 |
| Способ определения аномалий морской поверхности по оптическим изображениям | 2022 |
|
RU2784788C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВОДНОГО ГИДРОДИНАМИЧЕСКОГО ИСТОЧНИКА (ГДИ) ПО КВАЗИЗЕРКАЛЬНОМУ РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2763947C2 |
| УСТРОЙСТВО ОПТИЧЕСКОЙ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ШЕРОХОВАТОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2400705C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |




Предложен способ определения скорости ветра над водной поверхностью, в котором получают более двух пространственно-временных изображений водной поверхности из оптических изображений, полученных с помощью более чем двух оптических систем на основе линеек ПЗС-фотодиодов, синхронизированных между собой единым задающим генератором и установленных с разными направлениями визирования в заданном угловом секторе, определяемом азимутальным углом между крайними линейками ПЗС-фотодиодов, причем каждая линейка ПЗС-фотодиодов регистрирует одномерные оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют по дальности два полученных с соседних линеек ПЗС-фотодиодов изображения по дальности, определяют направления распространения ветровых порывов (определяют углы между направлениями визирования соседних линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов между соседними линейками ПЗС-фотодиодов) и скорость ветровых порывов для соседних линеек ПЗС-фотодиодов по углам наклона полос ветровых порывов на пространственно-временных изображениях, полученных соседними линейками ПЗС-фотодиодов, и известному углу между направлениями визирования соседних линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в направлении визирования в каждой точке водной поверхности получают решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом углового распределения яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов сравнение измеренной яркости водной поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости водной поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде в случае необходимости достижения высокого пространственного разрешения на водной поверхности в направлении визирования линеек ПЗС-фотодиодов либо с помощью двух взаимно откалиброванных видеокамер, на объективы которых установлены поляроиды с вертикально и горизонтально расположенными осями пропускания, либо с помощью одной видеокамеры, на объектив которой, как и на объективы линеек ПЗС-фотодиодов, установлены поляроиды или с вертикально, или с горизонтально расположенной осью пропускания, при этом в линейках ПЗС-фотодиодов используют длиннофокусные узкоугольные объективы, а в случае необходимости достижения широкой полосы обзора - с помощью самих линеек ПЗС-фотодиодов с установленными на них широкоугольными объективами и установленными на объективах поляроидами с вертикально или горизонтально расположенной осью пропускания. 4 ил.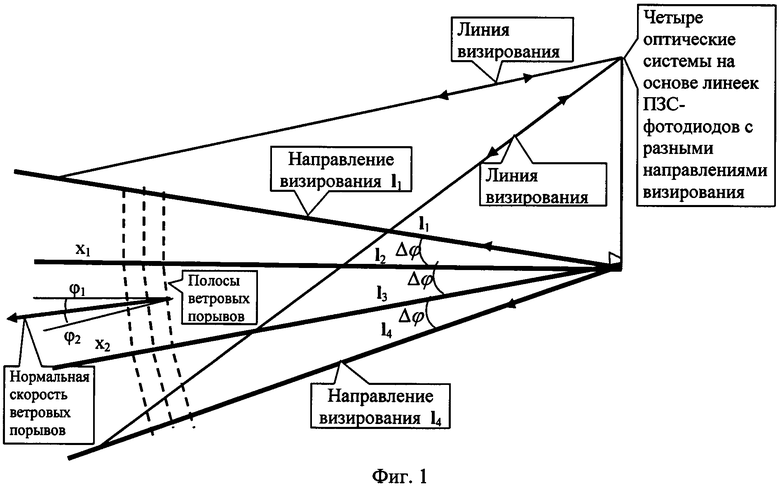
Способ определения скорости ветра над водной поверхностью, в котором получают не менее чем два пространственно-временных изображения водной поверхности из оптических изображений, полученных с помощью не менее чем двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, причем каждая линейка ПЗС-фотодиодов регистрирует одномерные оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют по дальности два полученных с соседних линеек ПЗС-фотодиодов изображения по дальности, определяют направления распространения ветровых порывов (определяют углы между направлениями визирования соседних линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов между соседними линейками ПЗС-фотодиодов) и скорость ветровых порывов для соседних линеек ПЗС-фотодиодов по углам наклона полос ветровых порывов на пространственно-временных изображениях, полученных соседними линейками ПЗС-фотодиодов, и известному углу между направлениями визирования соседних линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в направлении визирования в каждой точке водной поверхности получают решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом углового распределения яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования каждой линейки ПЗС-фотодиодов сравнение измеренной яркости водной поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости водной поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде, отличающийся тем, что для измерений используют более двух оптических систем на основе линеек ПЗС-фотодиодов, синхронизированных между собой единым задающим генератором и установленных с разными направлениями визирования в заданном угловом секторе, определяемом азимутальным углом между крайними линейками ПЗС-фотодиодов, и регистрацию углового распределения яркости неба и окологоризонтного участка водной поверхности в цифровом виде осуществляют в случае необходимости достижения высокого пространственного разрешения на водной поверхности в направлении визирования линеек ПЗС-фотодиодов либо с помощью двух взаимно откалиброванных видеокамер, на объективы которых установлены поляроиды с вертикально и горизонтально расположенными осями пропускания, либо с помощью одной видеокамеры, на объектив которой, как и на объективы линеек ПЗС-фотодиодов, установлены поляроиды или с вертикально, или с горизонтально расположенной осью пропускания, используя при этом в линейках ПЗС-фотодиодов длиннофокусные узкоугольные объективы, а в случае необходимости достижения широкой полосы обзора - с помощью самих линеек ПЗС-фотодиодов с установленными на них широкоугольными объективами и установленными на объективах поляроидами с вертикально или горизонтально расположенной осью пропускания.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ НАПРАВЛЕННОГО ПОТОКА ЖИДКОСТИ ИЛИ ГАЗА | 2014 |
|
RU2549251C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ ПРИВОДНОГО ВЕТРА | 2014 |
|
RU2548120C1 |
| Приспособление для воспроизведения световых изображений на летательных аппаратах | 1926 |
|
SU4754A1 |
| US 7683928 B2, 23.03.2010. | |||

