Изобретение относится к средствам диагностики водной поверхности и может быть использовано для исследования пространственного распределения по дальности скорости ветра над водной поверхностью (так называемого приповерхностного ветра).
Как известно, величина приповерхностного ветра определяет интенсивность волнения, которое играет важнейшую роль во взаимодействии атмосферы и моря. Как правило, скорость ветра над морем не является постоянной величиной. Скорость ветра характеризуется некоторой средней величиной, на которую "накладываются" флуктуации скорости ветра. Средняя скорость ветра может характеризоваться крупномасштабной изменчивостью, обусловленной, например, циклоническими процессами в атмосфере. Условно можно разделить ветер на стационарный и нестационарный. Стационарный ветер характеризуется относительно небольшими флуктуациями скорости ветра. Флуктуации скорости ветра могут быть значительными при так называемых нестационарных или порывистых ветрах, например при катабатическом ветре (нисходящий ветер с гор, обусловленный, в частности, температурной разницей между воздухом в горах и морской поверхностью). Локальное увеличение скорости ветра известно под названием ветровых порывов (или шквалов). Разработка способов регистрации порывистого (или шквального) ветра над морем является одной из основных задач океанографии. Эти ветра могут быть обусловлены как температурной разницей между воздухом в горах и морской поверхностью, так и более крупномасштабными циклоническими процессами. Такие ветра являются очень опасными для судоходства, как, например, известная бора, возникающая в Новороссийске в основном в осенние и зимние месяцы.
Известны контактные методы регистрации скорости ветра в "точке" с помощью "чашечных" анемометров или акустических датчиков. Для измерения пространственного распределения скорости ветра необходимо создавать пространственные решетки измерителей скорости ветра. Однако создание такого "поля" измерителей скорости ветра является чрезвычайно сложной задачей в силу того, что ветровые поля обладают сложной пространственно-временной структурой с пространственными масштабами от метров до километров. Размещение измерителей на море требует установки специальных буев, такая система не обладает мобильностью: ее сложно переместить в другое место.
Известны способы регистрации скорости ветра с помощью скаттерометров, работающих в радиодиапазоне электромагнитных волн. Скаттерометры излучают микроволновые импульсы в направлении океанской поверхности и измеряют мощность отраженного сигнала. Принцип регистрации скорости ветра основан на зависимости мощности отраженных поверхностью моря сигналов скаттерометров от скорости и направления ветра. Эта зависимость, или так называемая модельная функция, должна быть заранее известна [см, например, Figa, J., and Stoffelen, A., "On the Assimilation of Ku-band Scatte-rometer Winds for Weather Analysis and Forecasting", IEEE Trans, on Geoscience and Rem. Sens. 38 (4) pp. 1893-1902, 2000]. Для регистрации скорости и направления ветра на больших площадях используют спутниковые сканирующие скаттерометры. Для определения направления ветра используют угловую зависимость сигналов скаттерометра относительно направления ветра при круговом сканировании антенны. Скаттерометры обладают широкой полосой обзора, но имеют низкое пространственное и временное разрешение, так как они пролетают над одним и тем же участком поверхности моря только через оборот спутника вокруг Земли.
Существуют также способы определения скорости ветра оптическими средствами. Известен способ определения скорости ветра над морем по изображению солнечной дорожки [Naoto Ebuchi and Shoichi Kizu. Probability Distribution of Surface Wave Slope Derived Using Sun Glitter Images from Geostationary Meteorological Satellite and Surface Vector Winds from Scatterometers. Journal of Oceanography, 2002. Vol. 58, pp. 477-486]. Здесь по солнечной дорожке определяют дисперсию уклонов волн, а затем используют связь между дисперсией уклонов и скоростью ветра. Такой способ определения скорости ветра используют при анализе изображений солнечной дорожки, полученных со спутников. Этот способ имеет недостатки, связанные с цикличностью пролета спутника над определенным местом, с наличием облачности, обуславливающим невозможность получения изображения. Помимо того, что этот способ применим только в зоне солнечной дорожки, способ обладает низким пространственным разрешением, так как для получения хорошей точности необходимо применять соответствующие масштабы усреднения солнечных бликов.
Известен также способ определения скорости ветра по перепаду яркости на горизонте [Бялко А.В., Пелевин В.Н. О контрасте яркости неба и моря // Изв. АН СССР, Физика атмосферы и океана, 1975. Т. 11, №7, С. 755-756]. Величина перепада яркости определяется дисперсией уклонов волн. Однако этот способ позволяет оценить скорость ветра только около горизонта.
Все перечисленные оптические способы не дают возможности определить характеристики ветра с хорошим пространственно-временным разрешением, а также обладают низкой помехоустойчивостью (мешает облачный покров), поскольку в них для определения скорости ветра используется только область солнечных бликов.
Наиболее близким по технической сущности к разработанному способу выбран способ, описанный в следующей статье: Титов, В.И. Разработка принципов мониторинга состояния водной поверхности и приводного слоя атмосферы по оптическим изображениям поверхности / В.И. Титов, В.В. Баханов, Е.М. Зуйкова, А.Г. Лучинин // Современные проблемы дистанционного зондирования Земли из космоса. - 2012. - Т. 9, №2. - С. 270-274. В статье предложена идея определения скорости ветра по пространственно-временным изображениям (изображения в координатах дальность - время) водной поверхности при рассеянном небесном освещении (вне зоны солнечных бликов), полученным из оптических изображений водной поверхности, зарегистрированных оптическими системами на основе двух линеек ПЗС-фотодиодов с разным направлением визирования (Подробно процесс получения и создания таких изображений описан в патенте РФ на изобретение №2436040 «Способ определения кинематических характеристик поверхностных волн по пространственно-временным изображениям водной поверхности»: МПК G01C 13/00; авторы: Зуйкова Э.М., Титов В.И., Троицкая Ю.И.; патентообладатель: ИПФ РАН; дата приоритета 03 ноября 2009 г.). Идея основана на том, что определяют скорость ветра по известной модельной зависимости скорости ветра от дисперсии уклонов волн, при этом дисперсию уклонов волн предлагают определять с помощью аналитической зависимости локально усредненной яркости водной поверхности от дисперсии уклонов волн.
В статье, однако, изложена только идея и не конкретизированы операции способа, необходимые для получения результата. Кроме того, прототип работает в очень узком диапазоне условий: безоблачное небо и квадратичное угловое распределение яркости неба. Это требуется для получения аналитического решения обратной задачи определения дисперсии уклонов волн по яркости водной поверхности. По этой причине в прототипе предъявляются определенные требования к функции распределения видимых уклонов волн (используется так называемая функция Сандерса (Saunders, P.M., "Shadowing of the Ocean and Existence of the Horizon,", Journal of Geophysical Research 72, 4643-4650, 1967)) и к яркости неба в районе зеркальной точки небосвода: небо должно быть безоблачным, наличие облаков вызывает определенные трудности при определении скорости ветра, так как зеркальные точки в разных участках поверхности могут попадать на облачные участки небосвода. То есть способ-прототип обладает низкой помехоустойчивостью. Основным же недостатком способа прототипа является то, что в нем скорость ветра определяют только над одной точкой водной поверхности единовременно, поскольку для другой точки водной поверхности приходится заново подбирать параметры углового распределения яркости неба. Таким образом, при реализации на практике выяснилось, что ограничения, накладываемые этим способом, не позволяют адекватно использовать его для определения скорости ветра.
Задачей, решаемой настоящим изобретением, является разработка способа определения пространственного распределения по дальности скорости ветра над водной поверхностью по пространственно-временным изображениям водной поверхности при рассеянном небесном освещении (вне зоны солнечных бликов), полученным как с неподвижного основания, так и с движущегося носителя, и обладающего высокой помехоустойчивостью.
Технический результат в разработанном способе достигается тем, что скорость ветра над водной поверхностью определяют из известной модельной зависимости дисперсии уклонов волн от скорости ветра, а дисперсию уклонов волн получают, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба.
Новым в разработанным способе является то, что получают два пространственно-временных изображения водной поверхности из оптических изображений, полученных с помощью двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, причем регистрируют оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют полученные изображения по дальности, определяют направления распространения ветровых порывов по углам наклона полос ветровых порывов на пространственно-временных изображениях и известному углу между направлениями визирования обеих линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования получают, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба путем сравнения в каждой точке водной поверхности в направлении визирования измеренной яркости водной поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости водной поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде с помощью видеокамеры синхронно с регистрацией пространственно-временных изображений. Способ поясняется следующими чертежами.
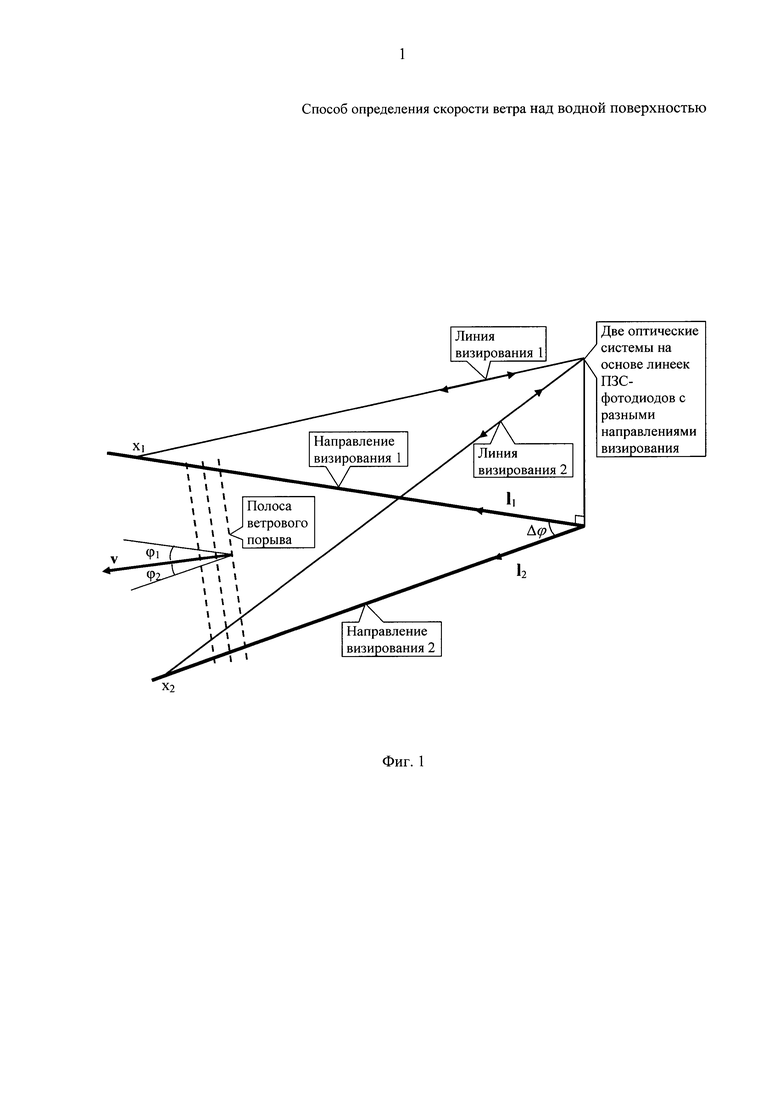
Фиг. 1 - схема наблюдения водной поверхности с помощью двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования.
Фиг. 2 - пространственно-временные изображения водной поверхности, демонстрирующие проявления катабатического ветра.
Фиг. 3 - распределение скорости ветра в координатах дальность - время в условной полутоновой шкале (врезка справа на фиг. 3, скорость ветра в м/с).
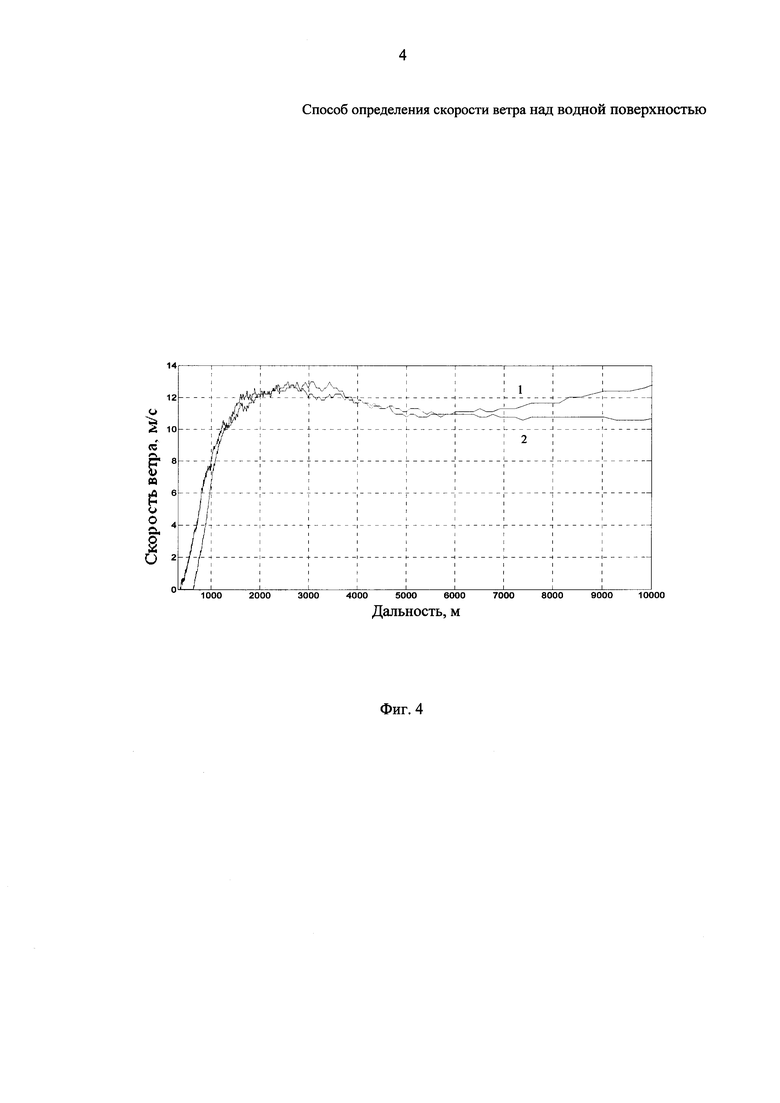
Фиг. 4 - зависимость средней по времени скорости ветра от расстояния от берега моря, определенная по двум пространственно-временным изображениям поверхности моря, приведенным на Фиг. 2.
Способ осуществляют следующим образом.
Сначала определяют направления распространения ветровых порывов.
Для этого получают два пространственно-временных изображения водной поверхности (в соответствии с патентом РФ на изобретение №2436040): формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами наблюдения (угол наблюдения - угол между направлением визирования и линией визирования, см. Фиг. 1) с помощью двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования одновременно, регистрируют одномерные изображения с помощью двух линеек ПЗС-фотодиодов и проводят их обработку, преобразуя одномерное изображение в последовательность цифровых значений, определяя положение линии горизонта по перепаду яркости изображения, беря за начало отсчета последовательности цифровых значений одномерных изображений положение линии горизонта, исправляя перспективные искажения изображения путем перехода к эквидистантной сетке по дальности с помощью интерполяции исходных значений яркости одномерных изображений с последующей нормировкой значений яркости изображения на среднее значение яркости в изображении, и затем строят два пространственно-временных изображения, сформированных из одномерных изображений. Полученные изображения, в силу того что регистрируются одновременно для обоих направлений визирования, получаются синхронизированными между собой; дополнительно их «состыковывают» началами по дальности.
На Фиг. 2 приведены пространственно-временные изображения проявлений катабатического ветра, полученные с берега с двух установленных рядом оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования. Изображения «состыкованы» началами по дальности. По вертикали отложено расстояние от оптических приборов в метрах, по горизонтали - время. Черное море, оптических систем на основе линеек ПЗС-фотодиодов 100 м над уровнем моря. Небо - сплошные тучи.
На Фиг. 2 темные полосы - области увеличения скорости ветра (или области ветровых порывов), яркие полосы - области «выглаживания» волнения из-за уменьшения скорости ветра. Ветровые порывы проявляются на пространственно-временных изображениях в виде полос, угол наклона которых определяется их скоростью распространения. Длина полос определяется временем существования ветровых порывов. Ветровые порывы можно идентифицировать по их пространственной структуре и по скоростям распространения, которые существенно превышают скорость поверхностных волн. По двум пространственно-временным изображениям определяют скорость и направление распространения ветровых порывов, при этом эти изображения должны быть синхронизированы между собой (должны регистрироваться одновременно для обоих направлений визирования).
Пусть оптические системы на основе линеек ПЗС-фотодиодов установлены на неподвижном основании. Обозначим через I(r, t) интенсивность излучения водной поверхности, зависящую от координаты точки на поверхности r и времени t. Яркость пространственно-временного изображения в координатах x, t (ось x на поверхности моря в направлении визирования линейки ПЗС-фотодиодов) будет пропорциональна I(lx, t), l - единичный вектор, определяющий направление одномерного изображения на водной поверхности (направление визирования линейки ПЗС-фотодиодов).
Пусть на водной поверхности имеется движущаяся полоса ветрового порыва, яркость которой описывается выражением  , где v - вектор нормальной скорости полосы ветрового порыва, указывающий направление распространения ветрового порыва, v - модуль вектора v. Яркость пространственно-временного изображения в координатах x, t будет пропорциональна
, где v - вектор нормальной скорости полосы ветрового порыва, указывающий направление распространения ветрового порыва, v - модуль вектора v. Яркость пространственно-временного изображения в координатах x, t будет пропорциональна  . Пространственно-временное изображение ветрового порыва также будет являться полосой. На Фиг. 2 проведены линии OA и OB, параллельные полосам ветровых порывов на двух пространственно-временных изображениях водной поверхности, зарегистрированных одновременно линейками ПЗС-фотодиодов с разными направлениями визирования. Углы α1, и α2 - углы между линиями OA и ОВ и горизонтальной осью - осью времени. Тангенсы этих углов tgα1 и tgα2 позволяют определить ориентацию полос ветровых порывов, а также знак и направление их нормальной скорости (скорости распространения ветровых порывов).
. Пространственно-временное изображение ветрового порыва также будет являться полосой. На Фиг. 2 проведены линии OA и OB, параллельные полосам ветровых порывов на двух пространственно-временных изображениях водной поверхности, зарегистрированных одновременно линейками ПЗС-фотодиодов с разными направлениями визирования. Углы α1, и α2 - углы между линиями OA и ОВ и горизонтальной осью - осью времени. Тангенсы этих углов tgα1 и tgα2 позволяют определить ориентацию полос ветровых порывов, а также знак и направление их нормальной скорости (скорости распространения ветровых порывов).
Для двух пространственно-временных изображений, зарегистрированных одновременно линейками ПЗС-фотодиодов с направлениями визирования l1 и l2, имеем систему двух уравнений:

где v - модуль нормальной скорости полос ветровых порывов, ϕ1 и ϕ2 - углы между направлением визирования каждой из линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов. При этом ϕ2=Δϕ-ϕ1, где Δϕ - угол между направлениями визирования обеих линеек ПЗС-фотодиодов(см. Фиг. 1):

Уравнения (1) и (2) при известном Δϕ позволяют определить углы между направлением движения полос ветровых порывов и направлениями визирования линеек ПЗС-фотодиодов и скорость ветровых порывов:
(tgα1-tgα2cosΔϕ)cosϕ1=tgα2sinΔϕsinϕ1,
ϕ2=Δϕ-ϕ1,
v=tgα1cosϕ1.
Таким образом, по двум полученным пространственно-временным изображениям можно определять направление распространения ветровых порывов.
Эти расчеты применимы и к случаю проведения измерений с подвижного носителя, только в формулах (1), (2) необходимо будет учесть скорость носителя.
Для приведенного на Фиг. 2 случая направление движения полос ветровых порывов - посередине между направлениями визирования линеек ПЗС-фотодиодов, скорость ветровых порывов - 36 км/ч.
Затем определяют распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба, причем для решения задачи «обращения» используют в каждой точке водной поверхности в направлении визирования сравнение измеренной яркости поверхности, нормированной на яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной яркости поверхности, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба в зависимости от условий освещения, либо используют угловое распределение яркости неба и окологоризонтного участка водной поверхности, зарегистрированное в цифровом виде с помощью видеокамеры синхронно с регистрацией пространственно-временных изображений.
Под яркостью водной поверхности будем понимать локально усредненную регистрируемую яркость (в каждой точке водной поверхности в направлении визирования). Как правило, масштабы усреднения яркости определяются масштабами разрешения полученного одномерного изображения водной поверхности.
Модельная яркость водной поверхности для случая неполяризованного излучения неба с учетом затенения будет определяться формулой:

где  - вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wν(η) - распределение видимых уклонов волн водной поверхности, Is - неусредненная яркость водной поверхности, равная:
- вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wν(η) - распределение видимых уклонов волн водной поверхности, Is - неусредненная яркость водной поверхности, равная:
Is=FIsky,
F - коэффициент отражения Френеля, Isky - угловое распределение яркости неба. Выражение для модельной яркости водной поверхности написано для случая неполяризованного излучения неба. В общем случае поляризованного излучения используют параметры Стокса и матрицу коэффициентов Френеля, но установка поляроида на объектив линейки ПЗС-фотодиодов позволяет использовать для вычислений формулу (3). Также распределение неусредненной яркости водной поверхности Isky зависит от спектрального коэффициента чувствительности фотоприемников. Модельная яркость водной поверхности под малыми углами наблюдения вне зоны солнечных бликов будет определяться дисперсией уклонов волн в направлении визирования  .
.
Дисперсия уклонов волн входит в выражение для распределения видимых уклонов волн водной поверхности Wν(η).
Как известно, существуют различные модели распределения видимых уклонов волн водной поверхности (например, его может описывать функция Сандерса: Saunders, P.M., "Shadowing of the Ocean and Existence of the Horizon," Journal of Geophysical Research 72, 4643-4650, 1967, или Caillault, K., Fauqueux, S., Bourlier, C., Simoneau, P. and Labarre, L., "Multiresolution optical Characteristics of rough sea surface in the infrared," Applied Optics 46, 5471-5481, 2007). Предлагаемый способ позволяет использовать любое из известных аналитических выражений для распределения видимых уклонов волн водной поверхности, в отличие от прототипа, который был ограничен функцией Сандерса, позволяющей получить аналитическую зависимость модельной яркости водной поверхности от дисперсии уклонов волн.
Для определения дисперсии необходимо решить ("обратить") интегральное уравнение, описываемое формулой (3), относительно дисперсии уклонов волн. В общем случае это уравнение не имеет аналитического решения и единственным способом решения является вычислительное графическое решение.
В формулу (3) входят распределения неусредненной яркости водной поверхности и углового распределения яркости неба, для получения которых необходимо производить калибровку регистрируемых оптическими системами электрических сигналов по источнику эталонного излучения. В предлагаемом способе переходят в формуле (3) к безразмерному отношению яркостей: нормируют (и модельную, и измеренную) яркость водной поверхности и угловое распределение яркости неба на яркость неба на горизонте. Тем самым существенно упрощается аппаратура (отсутствует эталонный источник) и компенсируются температурные и другие возможные "уходы" коэффициента усиления аппаратуры, что ведет к повышению точности предлагаемого способа.
Для этого в случае использования в формуле (3) выражения для углового распределения яркости неба в аналитической форме нормируют это выражение на аналитическое выражение яркости неба на горизонте.
Либо, в случае использования цифровой видеокамеры, непосредственно регистрируют угловое распределение яркости неба с "захватом" горизонта и окологоризонтного участка водной поверхности и производят соответствующую нормировку.
Модельная яркость водной поверхности, нормированная на яркость неба у горизонта, будет определяться безразмерным выражением:

где Ih - яркость неба на горизонте.
Значение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования (иначе говоря, пространственное распределение дисперсии уклонов волн по дальности) волн определяют путем сравнения модельной нормированной на яркость неба на горизонте яркости водной поверхности и измеренной нормированной на яркость неба на горизонте яркости водной поверхности для каждой точки поверхности. Для каждой точки поверхности в направлении визирования строят зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волн, при этом дисперсию уклонов волн меняют в некотором диапазоне значений: например, от 0 до 0,07 (средний квадратичный уклон волн меняется от 0 до  ), что соответствует скорости ветра от 0 м/с до 22 м/с. Полученную зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волн сравнивают с измеренной нормированной яркостью водной поверхности в данной точке поверхности и значение дисперсии уклонов волн, при которой эти яркости совпадают, присваивают этой точке водной поверхности. Путем перебора точек водной поверхности в направлении визирования строят распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования. Все это осуществляют одновременно и единым алгоритмом, в отличие от прототипа, в котором в каждой точке водной поверхности приходилось бы подбирать параметры углового распределения яркости неба.
), что соответствует скорости ветра от 0 м/с до 22 м/с. Полученную зависимость нормированной модельной яркости водной поверхности от дисперсии уклонов волн сравнивают с измеренной нормированной яркостью водной поверхности в данной точке поверхности и значение дисперсии уклонов волн, при которой эти яркости совпадают, присваивают этой точке водной поверхности. Путем перебора точек водной поверхности в направлении визирования строят распределение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования. Все это осуществляют одновременно и единым алгоритмом, в отличие от прототипа, в котором в каждой точке водной поверхности приходилось бы подбирать параметры углового распределения яркости неба.
И наконец, определяют скорость ветра над каждой точкой водной поверхности в направлении визирования (иначе говоря, искомое пространственное распределение по дальности скорости ветра над водной поверхностью) из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления распространения ветровых порывов.
Скорость ветра U над каждой точкой водной поверхности вычисляют по эмпирическим формулам Cox'a и Munk'a, связывающим дисперсию уклонов волн со скоростью ветра:


где σw и σс - средние квадратичные уклоны волн в направлении по ветру и перпендикулярно ветру, U - скорость ветра в м/с на высоте 12,5 м над уровнем моря. Существуют также другие модельные зависимости скорости ветра от дисперсии уклонов волн, которые можно использовать в данном способе. Для определения скорости ветра по формулам (5) необходимо знать направление ветра. Направление ветра определяют по направлению распространения ветровых порывов, совпадающему с направлением скорости ветровых порывов, которое определяется по двум пространственно-временным изображениям морской поверхности, зарегистрированным одновременно линейками ПЗС-фотодиодов с разным направлением визирования.
Дисперсия уклонов волн в направлениях визирования линеек ПЗС-фотодиодов будет определяться выражением:


где ϕ1 и ϕ2 - углы между направлением визирования каждой из линеек ПЗС-фотодиодов и направлением движения полос ветровых порывов (см. Фиг. 1) Формулы (5) и (6) позволяют определить скорость ветра над каждой точкой водной поверхности в направлениях визирования линеек ПЗС-фотодиодов:


На фиг. 3 приведены вычисленные по формуле (7) скорости ветра над каждой точкой водной поверхности в направлении визирования в координатах дальность - время в условной полутоновой шкале (врезка справа на рис. 3, скорость ветра в м/с) для двух направлений визирования линеек ПЗС-фотодиодов (верхнее и нижнее изображения). Ветровые порывы могут достигать скорости 16-19 м/с.
Скорость ветра в каждой точке поверхности является мгновенной. При усреднении по времени скорости ветра над каждой точкой водной поверхности для двух направлений визирования линеек ПЗС-фотодиодов должны совпадать, что должно являться подтверждением хорошей точности определения пространственного распределения по дальности скорости ветра над водной поверхностью предлагаемым способом.
На фиг. 4 приведена зависимость средней по времени скорости ветра от расстояния от берега моря, определенная по двум пространственно-временным изображениям поверхности моря 1 и 2 (см. Фиг. 2). Время усреднения составляло 4 мин. Скорости ветра над каждой точкой водной поверхности для двух направлений визирования совпадают. Средняя скорость ветра растет до величины порядка 13 м/с; с увеличением расстояния от берега до 1,5-2 км. Далее скорость ветра остается примерно постоянной и начинает уменьшаться после 4 км.
В данном способе определения скорости ветра над водной поверхностью речь идет об оптических изображениях морской поверхности, однако предлагаемые подходы могут использоваться при разработке способов определения ветра по радиолокационным изображениям морской поверхности.
Способ может быть применим для определения пространственного распределения по дальности скорости ветра над водной поверхностью как с неподвижного основания (например, с берега, с пирса, с морской платформы), так и с движущегося носителя (с судов, вертолетов).
Высокая помехоустойчивость в данном способе достигается тем, что наблюдение поверхности моря ведется под малыми углами наблюдения ниже уровня облачности, а также тем, что способ позволяет выбрать для описания любую функцию распределения видимых уклонов волн водной поверхности, которая может более адекватно описывать яркость водной поверхности для конкретных условий наблюдения.
Таким образом, предлагаемый способ позволяет определять пространственное распределение по дальности скорости ветра над водной поверхностью по пространственно-временным изображениям водной поверхности при рассеянном небесном освещении (вне зоны солнечных бликов), полученным как с неподвижного основания, так и с движущегося носителя, и обладает высокой помехоустойчивостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2016 |
|
RU2627016C1 |
| Способ определения рельефа уклонов волн морской поверхности по оптическим пространственно-временным изображениям морской поверхности | 2024 |
|
RU2837976C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее оптическим изображениям | 2022 |
|
RU2794871C1 |
| Способ определения оптической толщины атмосферы | 2019 |
|
RU2729171C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОВЕРХНОСТНЫХ ВОЛН ПО ПРОСТРАНСТВЕННО-ВРЕМЕННЫМ ИЗОБРАЖЕНИЯМ ВОДНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2436040C2 |
| Определитель параметров ветра дистанционный пассивный | 2023 |
|
RU2801433C1 |
| Способ определения аномалий морской поверхности по оптическим изображениям | 2022 |
|
RU2784788C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПОДВОДНОГО ГИДРОДИНАМИЧЕСКОГО ИСТОЧНИКА (ГДИ) ПО КВАЗИЗЕРКАЛЬНОМУ РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2763947C2 |
| Способ определения параметров взволнованной водной поверхности в инфракрасном диапазоне | 2017 |
|
RU2651625C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРОЗРАЧНОСТИ АТМОСФЕРЫ | 2015 |
|
RU2668606C2 |


Способ определения скорости ветра над водной поверхностью, в котором получают при помощи двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования два пространственно-временных изображения водной поверхности. Стыкуют полученные изображения. Определяют направления распространения ветровых порывов по углам наклона полос ветровых порывов на пространственно-временных изображениях и известному углу между направлениями визирования. Скорость ветра определяют над каждой точкой водной поверхности в направлении визирования на основании модельной зависимости дисперсии уклонов волн. Технический результат заключается в разработке способа определения пространственного распределения по дальности скорости ветра над водной поверхностью по пространственно-временным изображениям водной поверхности при рассеянном небесном освещении (вне зоны солнечных бликов), полученным как с неподвижного основания, так и с движущегося носителя, и обладающего высокой помехоустойчивостью. 4 ил.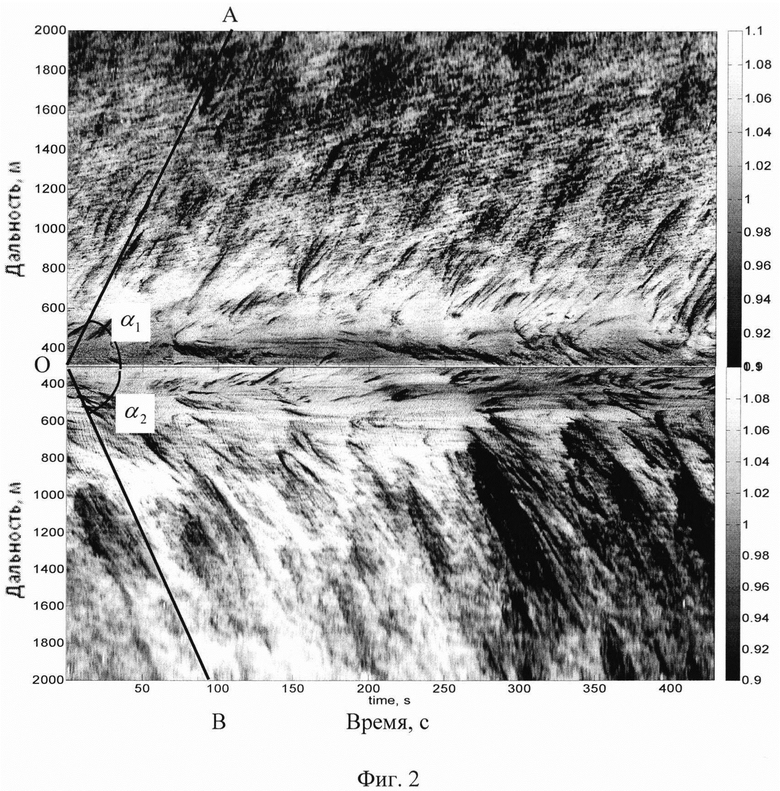
Способ определения скорости ветра над водной поверхностью, в котором скорость ветра над водной поверхностью определяют из известной модельной зависимости дисперсии уклонов волн от скорости ветра, а дисперсию уклонов волн получают, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба, отличающийся тем, что получают два изображения водной поверхности в координатах дальность-время из оптических изображений, полученных с помощью двух оптических систем на основе линеек ПЗС-фотодиодов с разными направлениями визирования, причем регистрируют оптические изображения с захватом линии горизонта и части неба под малыми углами наблюдения, стыкуют полученные изображения началами по дальности, определяют направления распространения ветровых порывов по углам наклона полос ветровых порывов на пространственно-временных изображениях и известному углу между направлениями визирования обеих линеек ПЗС-фотодиодов, скорость ветра определяют над каждой точкой водной поверхности в направлении визирования из известной модельной зависимости дисперсии уклонов волн от скорости ветра с учетом направления ветровых порывов, а значение дисперсии уклонов волн в каждой точке водной поверхности в направлении визирования получают, решая задачу «обращения» зависимости яркости водной поверхности от дисперсии уклонов волн с учетом угловой зависимости яркости неба путем сравнения в каждой точке водной поверхности в направлении визирования измеренной яркости водной поверхности, нормированной на измеренную яркость неба у горизонта, зарегистрированной в оптическом изображении водной поверхности, и модельной (расчетной) нормированной на яркость неба у горизонта яркости водной поверхности, при этом модельная (расчетная) яркость водной поверхности определяется формулой с учетом затененения склонов волн  , где
, где  - вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wν(η) - распределение видимых уклонов волн водной поверхности, являющееся функцией дисперсии уклонов волн, Is=FIsky - неусредненная яркость водной поверхности, F - коэффициент отражения Френеля, Isky - угловое распределение яркости неба, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба Isky в зависимости от условий освещения, либо используют угловое распределение яркости неба Isky, полученное из зарегистрированных в цифровом виде с помощью видеокамеры изображений неба с захватом линии горизонта, полученных синхронно с регистрацией изображений водной поверхности в координатах дальность-время.
- вектор уклонов волн, x и y - система координат на водной поверхности, причем ось x - в направлении визирования, Wν(η) - распределение видимых уклонов волн водной поверхности, являющееся функцией дисперсии уклонов волн, Is=FIsky - неусредненная яркость водной поверхности, F - коэффициент отражения Френеля, Isky - угловое распределение яркости неба, при этом в формуле для яркости водной поверхности используют либо аналитическое выражение для углового распределения яркости неба Isky в зависимости от условий освещения, либо используют угловое распределение яркости неба Isky, полученное из зарегистрированных в цифровом виде с помощью видеокамеры изображений неба с захватом линии горизонта, полученных синхронно с регистрацией изображений водной поверхности в координатах дальность-время.
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВЗВОЛНОВАННОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2466425C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ ПРИВОДНОГО ВЕТРА | 2009 |
|
RU2404434C2 |
| US 20130238244 A1, 12.09.2013 | |||
| US 5528493 A1, 18.06.1996. | |||

