Способ относится к оптическим способам исследования поверхности акваторий, используется для исследования поверхностного волнения в декаметровом диапазоне длин волн и позволяет определить основные кинематические характеристики длинных волн: направление распространения, скорость и длину волны. Он может быть применим для диагностики подповерхностных процессов, например внутренних волн, течений в океане по их проявлениям на водной поверхности, для изучения влияния рельефа дна на характеристики поверхностного волнения, определения участков загрязнения водной поверхности и т.д. Способ позволяет исследовать групповую структуру поверхностного волнения, которая обуславливает появление очень интенсивных и небезопасных поверхностных волн. Способ может быть применим для исследования волнения как с неподвижного основания (например, с берега, с пирса, с морской платформы), так и с движущегося носителя (с судов, вертолетов).
Как известно, большая часть энергии волнового движения в океане сосредоточена в области декаметровых поверхностных волн. Эти волны играют ключевую роль в энергообмене океана и атмосферы, они определяют безопасность судоходства и морских сооружений. Декаметровые волны могут распространяться в океане на сотни километров и нести информацию о штормах и ураганах. Цунами - частный случай таких волн, обусловленных тектоническими процессами в океане или извержением подводного вулкана. Декаметровые волны участвуют в формировании спектров короткомасштабных поверхностных волн путем каскадных процессов передачи энергии.
Известны способы определения характеристик водного волнения по радиолокационным панорамам водной поверхности, формируемым РЛС бокового обзора (см., например, Benjamin О.Verle, "Directional characteristics of sea-wave scattering observed at low-grazing angles," IEEE Trans. on Antennas and Propagation, V.46, NO. 1, 41-44 (1998)). Недостатком этих способов является то, что элемент разрешения стандартной судовой РЛС на водной поверхности имеет размеры порядка 30 метров. Информативный декаметровый диапазон длин волн не попадает в границы их применения.
Распространены также способы изучения волнения водной поверхности по «акустическим» панорамам, получаемым с помощью акустического локатора с «ножевой» диаграммой направленности антенны, лоцирующего водную поверхность из-под воды (см., например, Jerome A. Smith, "Observed variability of ocean wave Stokes drift, and the Eulerian Response to passing gropes," Journal of Physical Oceanography, V.36, 1381-1402 (2006)). В этом случае принимаемый сигнал формируется за счет рассеяния акустического излучения на микропузырьках воздуха у поверхности моря. Недостатком таких способов является относительно небольшая дальность и зависимость интенсивности отраженного излучения от состояния водной поверхности.
Наиболее близким аналогом по технической сущности к разработанному способу является способ определения характеристик водной поверхности по оптическим изображениям, который выбран в качестве прототипа (см. B.L.Gotwols and G.B.Irani, "Optical Determination of the Phase Velocity of Short Gravity Waves", Journal of Geophysical Research, V.85, No. C7, Pages 3964-3970, July 20, 1980). Способ-прототип включает в себя следующие шаги. Формируют двумерное изображение выбранного участка водной поверхности с помощью объектива CCD-камеры, установленной на неподвижной платформе, и регистрируют его на светочувствительную матрицу камеры. Затем после исправления перспективных искажений, обусловленных визированием поверхности под наклонными углами, из полученного изображения выделяют одномерное изображение и по последовательности таких изображений создают пространственно-временное изображение (изображение в координатах дальность-время) водной поверхности.
Недостатком ближайшего аналога является то, что формируется изображение очень небольшого участка поверхности (25 м на 13 м) вблизи платформы, и поэтому этот способ можно применять для получения информации исключительно о коротких поверхностных волнах. Также подобный способ формирования изображения не дает возможности компенсировать искажения, вносимые корабельной качкой, что ограничивает область применения этого способа измерениями только с неподвижного основания. Кроме того, предварительные преобразования проводят с исходным двумерным изображением, что требует существенных временных затрат и больших объемов оперативной компьютерной памяти, что не позволяет строить пространственно-временные изображения водной поверхности в реальном времени.
Задачей, решаемой настоящим изобретением, является разработка способа определения кинематических характеристик поверхностных волн по пространственно-временным изображениям водной поверхности в реальном времени, полученным как с неподвижного основания, так и с движущегося носителя.
Технический результат в разработанном способе достигается путем определения характеристик волнения водной поверхности, включающего, как и в способе-прототипе, формирование двумерного изображения водной поверхности с помощью оптической системы, выделение одномерных изображений и построение пространственно-временных изображений водной поверхности по выделенным одномерным изображениям.
Новым в разработанном способе по п.1 является то, что формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами визирования, регистрируют одномерные изображения с помощью линейки ПЗС-фотодиодов и проводят их обработку, преобразуя одномерные изображение в последовательность цифровых значений, определяя положение линии горизонта по перепаду яркости изображения, беря за начало отсчета последовательности цифровых значений одномерных изображений положение линии горизонта, исправляя перспективные искажения изображения путем перехода к эквидистантной сетке по дальности с помощью интерполяции исходных значений яркости одномерных изображений с последующей нормировкой значений яркости изображения на среднее значение яркости в изображении, затем строят пространственно-временное изображение, сформированное из одномерных изображений, и определяют кинематические характеристики поверхностных волн по периоду и наклону отображений этих волн на пространственно-временных изображениях водной поверхности с привлечением дисперсионного уравнения для поверхностных волн.
Новым в разработанном способе по п.2 является то, что формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами визирования с помощью двух оптических систем с разными направлениями наблюдения, регистрируют одномерные изображения с помощью двух линеек ПЗС-фотодиодов и проводят их обработку, преобразуя одномерное изображение в последовательность цифровых значений, определяя положение линии горизонта по перепаду яркости изображения, беря за начало отсчета последовательности цифровых значений одномерных изображений положение линии горизонта, исправляя перспективные искажения изображения путем перехода к эквидистантной сетке по дальности с помощью интерполяции исходных значений яркости одномерных изображений с последующей нормировкой значений яркости изображения на среднее значение яркости в изображении, затем строят два пространственно-временных изображения, сформированных из одномерных изображений, и определяют кинематические характеристики поверхностных волн по периоду и наклону отображений этих волн на двух пространственно-временных изображениях водной поверхности без привлечения дисперсионного уравнения для поверхностных волн.
Способ поясняется следующими чертежами.
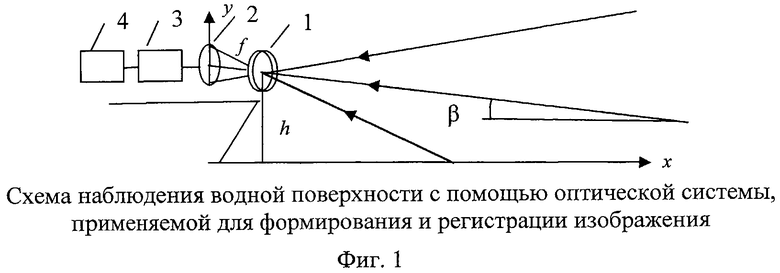
На фиг.1 представлена схема наблюдения водной поверхности с помощью оптической системы, применяемой для формирования и регистрации изображения.
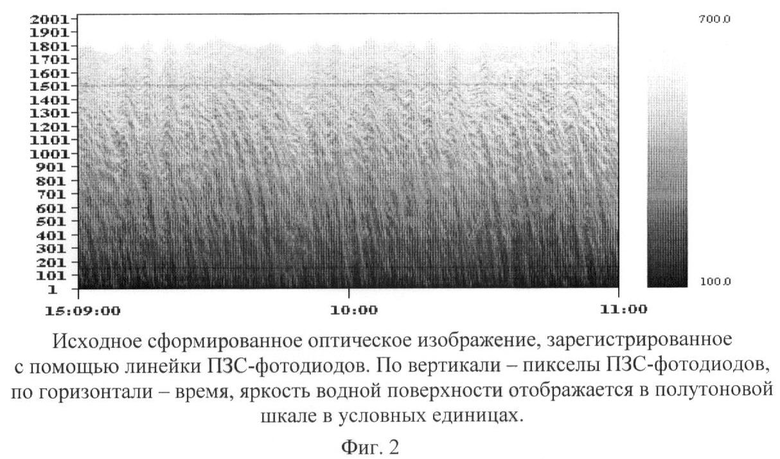
На фиг.2 представлено исходное сформированное пространственно-временное изображение, построенное по последовательности одномерных изображений, зарегистрированных с помощью линейки ПЗС-фотодиодов. По вертикали - пикселы ПЗС-фотодиодов (номера последовательности цифровых значений изображения), по горизонтали - время, яркость водной поверхности отображается в полутоновой шкале в условных единицах.
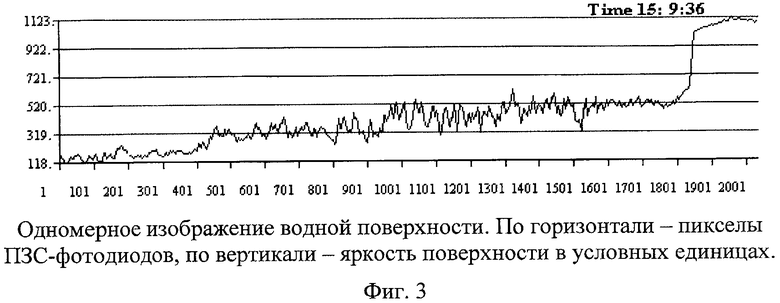
На фиг.3 представлено одномерное изображение водной поверхности. По горизонтали - пикселы ПЗС-фотодиодов, по вертикали - яркость поверхности в условных единицах.
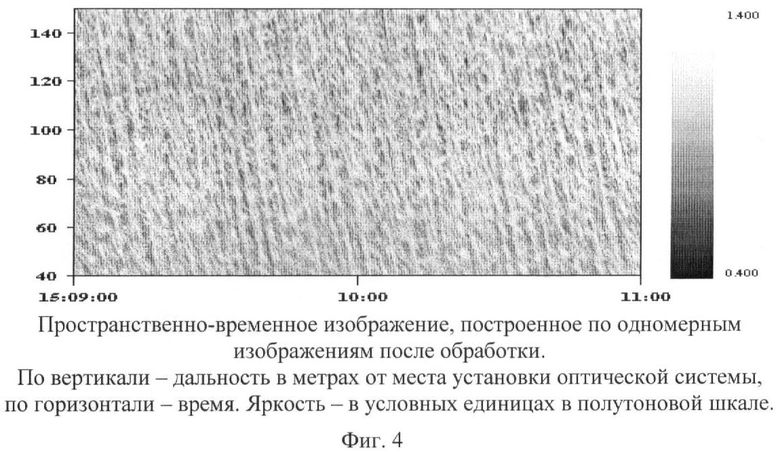
На фиг.4 представлено пространственно-временное изображение, построенное по одномерным изображениям после обработки. По вертикали - дальность в метрах от места установки оптической системы, по горизонтали - время. Яркость - в условных единицах в полутоновой шкале.
На фиг.5 представлены пространственно-временные изображения, полученные с двух оптических систем с разными направлениями наблюдения. Изображения «состыкованы» началами по дальности.
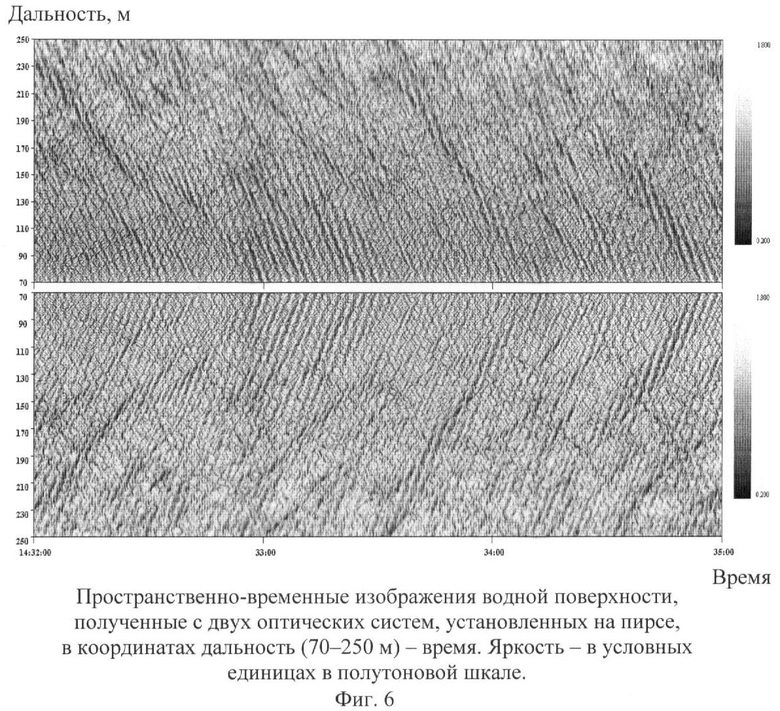
На фиг.6 представлены пространственно-временные изображения, полученные с двух оптических систем, установленных на пирсе, в координатах дальность (70-250 м) - время. Яркость - в условных единицах в полутоновой шкале.
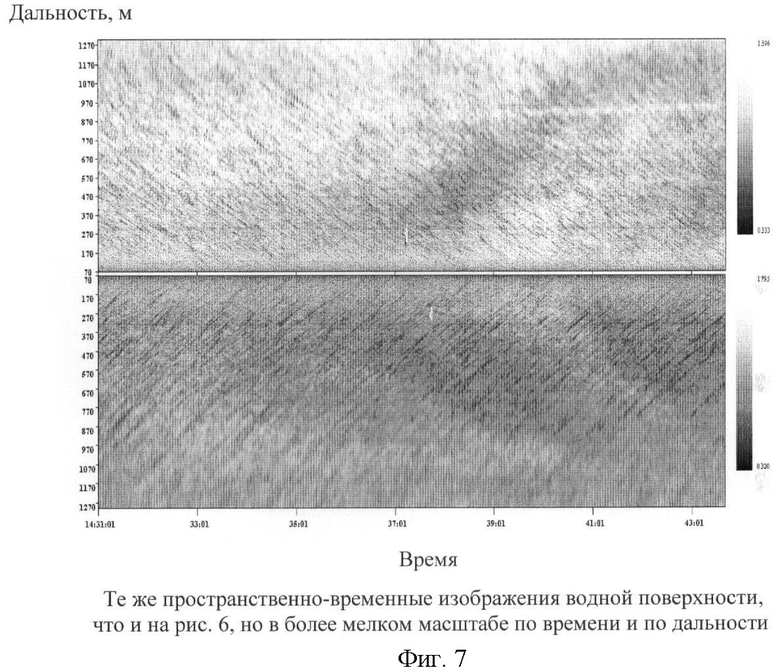
На фиг.7 представлены те же пространственно-временные изображения, что и на фиг.6, но в более мелком масштабе по времени и дальности.
Оптическая схема наблюдения, представленная на фиг.1, состоит из объектива 1 и линейки 2 ПЗС-фотодиодов, расположенных в фокальной плоскости объектива. Этим прибором регистрируются одномерные изображения водной поверхности от места установки прибора до горизонта и часть неба с угловыми размерами несколько градусов. С выхода линейки 2 одномерные изображения с помощью аналого-цифрового преобразователя (АЦП) 3 записываются на диск компьютера 4 для последующей обработки.
Способ по пункту 1 осуществляется следующим образом.
С помощью настройки оптической системы, состоящей из объектива 1 и линейки 2 ПЗС-фотодиодов, формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами визирования, что дает возможность сформировать изображение водной поверхности на большом расстоянии, чтобы отобразить декаметровые поверхностные волны, и осуществить привязку к линии горизонта, что позволяет при последующей обработке компенсировать перспективные искажения регистрируемого изображения и искажения, вносимые корабельной качкой. Кроме того, с помощью линейки 2 ПЗС-фотодиодов регистрируются одномерные изображения, что не требует больших вычислительных ресурсов и дает возможность обрабатывать получаемую информацию в режиме реального времени, без обработки двумерных изображений, которая имеет место в способе-прототипе в случае использования CCD-камеры.
Исходное сформированное оптическое изображение, зарегистрированное с помощью линейки 2 ПЗС-фотодиодов и представленное на фиг.2, значительным образом искажено. Перспективные искажения из-за наклонного визирования превращают фронты волн в кривые линии. Перепады яркости вверху изображения - линия горизонта, которая искривлена из-за качки корабля.
Координата у0 точки в фокальной плоскости объектива, отсчитываемая от оптической оси, связана с ее образом на поверхности уравнением:
где f - фокусное расстояние объектива 1;
β - угол визирования;
h - высота объектива 1 над уровнем водной поверхности;
х - горизонтальная проекция линии наблюдения от объектива 1 до точки на водной поверхности.
Координата изображения горизонта:
yh=-ftgβ.
С учетом условий  , β<<1 и того, что высоты волн много меньше высоты оптической системы над средним уровнем водной поверхности, имеем:
, β<<1 и того, что высоты волн много меньше высоты оптической системы над средним уровнем водной поверхности, имеем:

Координата у, отсчитываемая от точки горизонта, не зависит от качки судна и обратно пропорциональна расстоянию х точки поверхности от судна.
В разработанном способе для компенсации искажений, вносимых в изображение качкой корабля, предлагается одномерные изображения формировать таким образом, чтобы начало отсчета значений яркости изображения происходило от изображения горизонта. Пример такого одномерного изображения приведен на фиг.3. Таким образом, происходит «выравнивание» одномерных изображений по линии горизонта, при этом определяют положение точки горизонта по перепаду яркости на горизонте, используя амплитудный алгоритм. Исключением, когда этот алгоритм не работает, является полный штиль на водной поверхности, когда отсутствует линия горизонта, водная поверхность «сливается» с небом.
Для устранения перспективных искажений в разработанном способе используется переход к эквидистантной сетке по дальности путем интерполяции значений яркости одномерных изображений в соответствии с формулой (1). Кроме того, при отображении в полутоновой шкале производится нормировка интенсивности одномерного изображения на среднюю интенсивность в изображении за определенное время. При такой нормировке устраняется тренд яркости изображения к горизонту и появляется возможность "вписать" пространственно-временные изображения в динамический диапазон устройства отображения.
На фиг.4 приведено пространственно-временное изображение водной поверхности, полученное после обработки. Видно, что фронты волн на нем отображены в виде параллельных прямых, что соответствует реальной картине волнения водной поверхности и свидетельствует об эффективности приведенного в способе алгоритма обработки изображений водной поверхности.
Длинные декаметровые волны отображаются на получаемых пространственно-временных изображениях водной поверхности в координатах дальность-время с яркостью изображения, представленной в полутоновой шкале, в виде системы полос, период и наклон которых позволяют определить кинематические характеристики длинных волн. Ориентация этих полос в координатах дальность-время (x, t) описывается уравнением:
x(kl)-ωt=const,
где l - единичный вектор, определяющий направление регистрируемого одномерного изображения на водной поверхности; ω=2πf, k, f - волновой вектор и временная частота волны.
Очевидно, что по одной панораме можно определить только kl и ω. Временной период полос на пространственно-временных изображениях (при постоянном х) T=2π/ω, произведение kl=ω/tgδ, где tgδ - тангенс угла наклона полос к оси времени. Для определения полных кинематических характеристик необходимо привлекать дисперсионное соотношение для волн, которое связывает между собой значения пространственной и временной частот поверхностных волн. Дисперсионное соотношение с учетом глубины водоема имеет следующий вид:
(2πf)2=gk(1+γk2/g)th(kd),
где γ=α/ρ=70 см3/с2, α=70 дин/см - коэффициент поверхностного натяжения, ρ=1 г/см3 - плотность воды, d - глубина водоема в сантиметрах. В общем случае в дисперсионное соотношение входит также скорость течения на водной поверхности.
Таким образом, для получения полных кинематических характеристик декаметровых волн (направление распространения, скорость и длину волны) с высокой точностью необходимо привлекать дополнительную информацию о глубине водоема и скорости течения на поверхности.
В способе по пункту 2 предлагается другой путь получения полных кинематических характеристик длинных волн - это использование сразу двух оптических пространственно-временных изображений, полученных с двух оптических систем с разным направлением наблюдения.
Для двух пространственно-временных изображений с направлением визирования l1 и l2 имеем систему уравнений для определения координат волнового вектора:
которая позволяет получить полные кинематические характеристики длинной волны без привлечения дополнительной информации. Две оптические системы устанавливаются на баке (или надстройке) судна, чтобы регистрировать изображения водной поверхности для двух направлений наблюдения. На фиг.5 приведены пространственно-временные изображения с двух ПЗС-фотодиодов с разным направлением наблюдения, установленных на движущемся судне. Одна и та же система длинных поверхностных волн отображается на пространственно-временных изображениях полосами с одинаковым временным периодом, но в общем случае с разным наклоном в зависимости от направления распространения волн.
На фиг.6 и 7 приведены пространственно-временные изображения, полученные с оптических систем, установленных на пирсе. На этих изображениях видны темные полосы, которые являются проявлением групповой структуры длинных волн. По этим панорамам можно анализировать характеристики групповой структуры волн (скорость групповой структуры, которая должна совпадать с групповой скоростью волн, статистические характеристики групп: средний период, длительность, протяженность групп и т.д.) и динамику волнения в группах. На пространственно-временных изображениях на фиг.7 видно судно в виде короткой вертикальной белой полоски и светлый след после него, обусловленный «выглаживанием» ряби в следе судна.
Также на таких изображениях проявляются разливы нефти и пленок поверхностно-активных веществ (ПАВ), которые на фоне водной поверхности обычно имеют вид светлых пятен или полос (так называемых сликов). Относительное увеличение яркости загрязненных участков поверхности обусловлено понижением интенсивности короткомасштабных волн в сликах из-за вязкости пленок нефти и ПАВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения рельефа уклонов волн морской поверхности по оптическим пространственно-временным изображениям морской поверхности | 2024 |
|
RU2837976C1 |
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее оптическим изображениям | 2022 |
|
RU2794871C1 |
| Способ определения скорости ветра над водной поверхностью | 2015 |
|
RU2616354C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2016 |
|
RU2627016C1 |
| Способ определения аномалий морской поверхности по оптическим изображениям | 2022 |
|
RU2784788C1 |
| Способ определения оптической толщины атмосферы | 2019 |
|
RU2729171C1 |
| Способ нахождения положения фиктивных точек точечных источников давления систем волн у движущегося или обтекаемого объекта на и/или вблизи границы сред | 2020 |
|
RU2737595C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СКОРОСТИ МОРСКОГО ТЕЧЕНИЯ | 2016 |
|
RU2630412C1 |
| УСТРОЙСТВО ОПТИЧЕСКОЙ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ШЕРОХОВАТОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2400705C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2632176C1 |
Способ по первому варианту включает формирование с помощью оптической системы двумерного изображения водной поверхности с захватом линии горизонта и части неба под малыми углами визирования. Регистрируют с помощью линейки ПЗС-фотодиодов одномерные изображения, которые преобразуют в последовательность цифровых значений. Определяют по перепаду яркости изображения положение линии горизонта, которое берут за начало отсчета. Перспективные искажения исправляют путем перехода к эквидистантной сетке по дальности. Строят пространственно-временное изображение, сформированное из одномерных изображений. Кинематические характеристики поверхностных волн определяют по периоду и наклону отображений этих волн на пространственно-временных изображениях водной поверхности с привлечением дисперсионного уравнения для поверхностных волн. Во втором варианте используют две оптические системы с разными направлениями наблюдения и регистрируют одномерные изображения с помощью двух линеек ПЗС-фотодиодов. Кинематические характеристики определяют по двум пространственно-временным изображениям без привлечения дисперсионного уравнения для поверхностных волн. Технический результат - определение кинематических характеристик поверхностных волн в реальном времени как с неподвижного основания, так и с движущегося носителя. 2 н.п. ф-лы, 7 ил.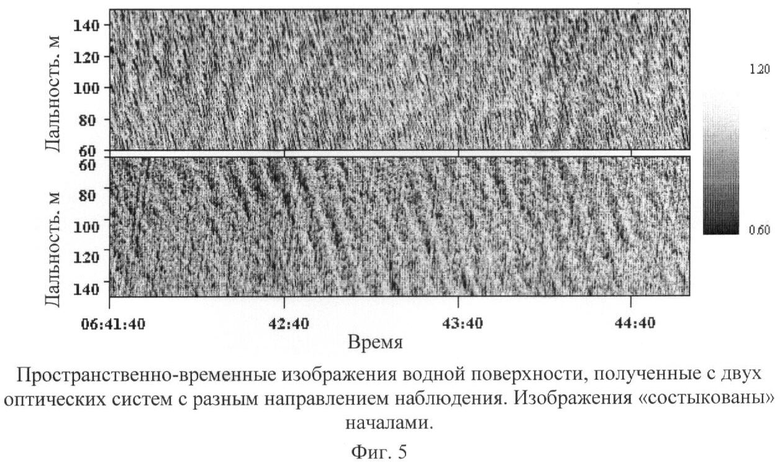
1. Способ определения кинематических характеристик поверхностных волн по пространственно-временным изображениям водной поверхности, включающий формирование двумерного изображения водной поверхности с помощью оптической системы, выделение одномерных изображений и построение пространственно-временных изображений водной поверхности по выделенным одномерным изображениям, отличающийся тем, что формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами визирования, регистрируют одномерные изображения с помощью линейки ПЗС-фотодиодов и проводят их обработку, преобразуя одномерные изображения в последовательность цифровых значений, определяя положение линии горизонта по перепаду яркости изображения, беря за начало отсчета последовательности цифровых значений одномерных изображений положение линии горизонта, исправляя перспективные искажения изображения путем перехода к эквидистантной сетке по дальности с помощью интерполяции исходных значений яркости одномерных изображений с последующей нормировкой значений яркости изображения на среднее значение яркости в изображении, затем строят пространственно-временное изображение, сформированное из одномерных изображений, и определяют кинематические характеристики поверхностных волн по периоду и наклону отображений этих волн на пространственно-временных изображениях водной поверхности с привлечением дисперсионного уравнения для поверхностных волн.
2. Способ определения кинематических характеристик поверхностных волн по пространственно-временным изображениям водной поверхности, включающий формирование двумерного изображения водной поверхности с помощью оптической системы, выделение одномерных изображений и построение пространственно-временных изображений водной поверхности по выделенным одномерным изображениям, отличающийся тем, что формируют изображение водной поверхности с захватом линии горизонта и части неба под малыми углами визирования с помощью двух оптических систем с разными направлениями наблюдения, регистрируют одномерные изображения с помощью двух линеек ПЗС-фотодиодов и проводят его обработку, преобразуя одномерные изображения в последовательность цифровых значений, определяя положение линии горизонта по перепаду яркости изображения, беря за начало отсчета последовательности цифровых значений одномерных изображений положение линии горизонта, исправляя перспективные изображения путем перехода к эквидистантной сетке по дальности с помощью интерполяции исходных значений яркости одномерных изображений с последующей нормировкой значений яркости изображения на среднее значение яркости в изображении, затем строят два пространственно-временных изображения, сформированных из одномерных изображений, и определяют кинематические характеристики поверхностных волн по периоду и наклону отображений этих волн на двух пространственно-временных изображениях водной поверхности без привлечения дисперсионного уравнения для поверхностных волн.
| JOURNAL OF GEOPHYSICAL RESEARCH, 1980, VOL | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| МЯЛЬНО-ТРЕПАЛЬНАЯ МАШИНА ДЛЯ ЛУБОВЫХ РАСТЕНИЙ | 1924 |
|
SU3964A1 |
| БАХАНОВ В.В., ЗУЙКОВА Э.М., КЕМАРСКАЯ О.Н., ТИТОВ В.И | |||
| Определение спектров волнения по оптическому изображению морской поверхности.: Изв | |||
| вузов | |||
| Радиофизика, 2006, т.49, №1, с.53-63 | |||
| СПОСОБ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ РАСПРОСТРАНЕНИЯ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1993 |
|
RU2092792C1 |
| Устройство для определения фазовых скоростей поверхностных волн | 1989 |
|
SU1791707A1 |
| CN 101105399 A, 16.01.2008 | |||
| JP 2000205930 A, 28.07.2000. | |||

