ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Эта заявка является одной частично продолжающей заявкой из находящихся одновременно на рассмотрении патентного ведомства “Внутрихирургическое изображение Оптической Когерентной Томографии Операции по удалению катаракты”, серийный номер: 13/329,813, поданная 19 декабря 2011, заявка в полном объеме включена посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Этот патентный документ касается применения системы изображения Оптической Когерентной Томографии во время операции по удалению катаракты. Более конкретно, этот патентный документ касается внутрихирургической Спектральной Области изображения Оптической Когерентной Томографии операции по удалению катаракты.
УРОВЕНЬ ТЕХНИКИ
Операция по удалению катаракты переживает революцию. Точность и скорость многих аспектов катарактальной операции кардинально улучшились за последние несколько лет. Системы импульсных лазерных скальпелей с фемтосекундным лазерным импульсом обеспечивают очень точно контролируемые функциональные возможности разрезания. Продвинутые оптические системы обеспечивают небывалый контроль над размещением и направлением лазерных импульсов. Кроме того, отображающие системы обеспечивают высококачественные изображения для того, чтобы помочь хирургам планировать и выполнять операции по удалению катаракты. Тем не менее, все еще имеется большое пространство для усовершенствования систем для операций по удалению катаракты, особенно в области отображения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Одна область, где существенное усовершенствование возможно и необходимо, обеспечивает более обширную и действенную информацию отображения для катарактального хирурга. Наиболее продвинутая из сегодняшних систем включает систему изображения Оптической Когерентной Томографии (ОКТ). До операции по удалению катаракты эти системы могут производить и показывать тщательное нелинейное или контрольное изображение в резе переднего отрезка глаза, который включает роговую оболочку, переднюю камеру глаза и хрусталик. Хирург может планировать операцию, делая пометки на показанном контрольном изображении, чтобы задать характерные точки или конечные точки различных резов и областей, которые будут фоторазрушены или фотообработаны. Диалоговый интерфейс лазерного контроллера может понять эти пометки и перевести их на электронные сигналы управления для наведения хирургического лазерного луча, чтобы выполнить соответствующие резы.
Чтобы погрузить изобретение в контекст, напоминают, что катарактальная операция при помощи системы лазерной хирургии может включать следующие шаги. (1) Во-первых, хрусталик может быть фоторазрушен в капсулярном мешке, сканируя хирургический лазерный луч согласно шаблону фоторазрушения. В зависимости от твердости катаракты, шаблона разрушения, степени разрушения и желательных результатов операции этот процесс могут называть дроблением, фрагментацией или лизисом. (2) Во-вторых, капсулярное веко или покрытие могут быть отрезаны в капсулярном мешке или в переднем капсулярном слое циклической капсулотомией, передней капсулотомией или непрерывной нелинейной капсулотомией. Капсулярное веко или покрытие выполнены так, что при удалении открывается отверстие в капсулярном мешке, через которое хирург может извлечь или аспирировать фоторазрушаемыйся хрусталик из капсулярного мешка. (3) Надрез доступа может быть затем сформирован в склере, лимбе или периферийной области роговицы глаза. Через этот надрез доступа хирургические приборы, такие как щипцы или факоигла, могут быть введены в глаз. (4) Затем капсулярное веко или покрытие могут быть удалены одним из введенных хирургических приборов, чтобы выполнить вышеупомянутое капсулярное отверстие. (5) Часто хирургический лазер не разрушает хрусталик полностью. В таких случаях факоигла может быть введена в капсулярный мешок для того, чтобы закончить разрушение хрусталика, применяя ультразвук и дробление. (6) Впоследствии фрагменты хрусталика могут быть удалены или аспирированы через капсулярное отверстие. (7) В заключение внутриглазной хрусталик (ВГЛ) может быть введена для того, чтобы восстановить зрение. Порядок шагов (1) и (2) может быть полностью изменен в некоторых операциях.
Катарактальные операции могут быть дополнены формированием дополнительных резов, таких как лимбальные послабляющие резы или дугообразные резы в роговой оболочке, и различных дополнительных надрезов доступа.
Тем не менее, с тех пор как фоторазрушение хирургическим лазерным лучом начало формировать запланированные резы, сегодняшние системы отображения не создают дополнительные изображения, которые могли бы обеспечить действенную информацию или обратную связь для катарактального хирурга. Это прежде всего, вследствие того, что с современные хирургические системы операций по удалению катаракты могут длиться довольно короткое время, например 10-20 секунд для капсулотомии или 30-40 секунд для фоторазрушения хрусталика. Существующие системы отображения не способны отобразить фоторазрушаемую область с достаточным разрешением за такое короткое время операции. Даже меньше - они способны к анализу изображения фоторазрушаемой области, чтобы обеспечить действенную обратную связь, или активного изменения продолжающейся хирургической операции. Такие функциональные возможности требовали бы более быстрого показа изображения и дополнительных или различных электронных систем и систем изображения.
Пока отображение и анализ затронутых областей во время короткого времени операции является трудным, обратная связь, основанная на таком отображении, или анализ были бы очень кстати для улучшения точности операции и управления неожиданными осложнениями при операции. Например, капсулотомия не может прорезать весь капсулярный мешок в некоторых частях линии кольцевого реза так, чтобы круглое веко или покрытие оставались присоединенными к остальной части капсулы в этих "окончаниях". Когда впоследствии хирург пытается удалять круглое веко щипцами, капсулярный мешок может быть порван на окончаниях, приводя к заусенцам или существенным разрывам. Если бы хирург был вовремя обеспечен изображением неполной капсулотомии, он, возможно, выбрал бы для повторного сканирования капсулотомический круг с лазером, чтобы прорезать окончания вместо того, чтобы начать удаление частично отдельного века.
В других случаях, когда фоторазрушение хрусталика выполнено, хирургический лазер может быть отсканирован слишком близко к заднему капсулярному слою, возможно, прокалывая его. Такой прокол может требовать сложной экстренной процедуры витрэктомии, существенно повышая риск всей операции по удалению катаракты. В свою очередь, хирург должен быть своевременно обеспечен обратной связью изображения, он, возможно, изменит шаблон сканирования, чтобы увести хирургический лазерный луч подальше от заднего капсулярного слоя, предотвращая витрэктомию.
В иных случаях хирургическая лазерная система может быть неправильно откалибрована: лазерный контроллер, возможно, неверно вычислил местоположение лазерного импульса по целому ряду причин, включая оптические отклонения, проблемы созданного допуска лазера, ложное толкование преломляющихся свойств хрусталика, дооперационной диагностической ошибки, движение или изменение формы глаза, и тепловой деформации компонентов. В примере, в то время как хирург, возможно, сделал пометки на контрольном изображении, чтобы сделать хирургический рез, например, 100 микрон от заднего капсулярного слоя, направляющая оптика, возможно, направила хирургический лазерный импульс к местоположению только 50 микрон от заднего капсулярного слоя из-за неправильной калибровки, повышая риск и сокращая точность и безопасность операции по удалению катаракты. Как указано выше, хирург должен быть обеспечен изображением проходящей операции, он, возможно, обнаружит неправильную калибровку, прежде чем фоторазрушение доберется на опасное расстояние 50 микрон от заднего капсулярного слоя.
В еще одном примере неправильная калибровка может быть вызвана тем, что весь хрусталик проходит вдоль оптической оси из-за разницы давления в передней камере глаза и в задней камере или стекловидного тела, расположенного позади хрусталика вдоль оптической траектории луча. Давление может измениться по целому ряду причин после того, как снимают контрольное изображение, например, из-за давления, проявленного интерфейсом пациента. Также глаз, являющийся динамической системой, может своевременно изменять внутренние давления в передней и задней камерах, например внутренние давления уравновешивают с внешними давлениями за расширенный период, такой как секунды или десятки секунд, после того как интерфейс пациента состыкован с глазом.
В еще одном примере неправильная калибровка может быть вызвана искривлением хрусталика, изменявшегося из-за аккомодации. Аккомодация может возникать по вине пациента до и во время операции. Хирурги обычно применяют наркотики, чтобы остановить или подавить аккомодацию, фактически расширяя зрачок. Тем не менее, эти наркотики производят различные эффекты на различных пациентов, и даже эти различные эффекты сопровождаются различной продолжительностью. В свою очередь, в последних двух примерах, как прежде, хирург должен быть обеспечен обновленными или своевременными изображениями во время операции, он, возможно, обнаружит неправильную калибровку и, возможно, предпримет профилактические или корректирующие действия.
Общая особенность этого и многих других возможных хирургических осложнений - это то, что они становятся обнаружимыми только после того, как начнется фоторазрушение заданной ткани. Как описано выше, формирование изображения во время томографирования короче, чем время операции 10, 20, 40 или 60 секунд, может быть большим вызовом для сегодняшних систем отображения, особенно если изображение с высоким разрешением необходимо для обеспечения действенной информации отображения. И оно может чрезмерно стимулировать существующие системы дополнительно анализировать изображение, чтобы показать обратную связь или предложенное корректирующее действие или чтобы активно изменить сканирование хирургического фоторазрушаемого луча лазера.
Существующий патентный документ описывает варианты реализации хирургических систем для удаления катаракты с продвинутыми системами отображения, которые формируются для отображения, а в некоторых исполнениях, чтобы анализировать области, фоторазрушенные хирургическим лазерным лучом во время томографирования, короче, чем обычное операционное время. Вследствие этого эти варианты реализации позволяют модифицировать операцию по удалению катаракты в режиме реального времени или хирургом или непосредственно хирургической системой, предвещая качественное усовершенствование эффективности и безопасности современной операция по удалению катаракты.
Так, в частности, в варианте реализации хирургическая система для удаления катаракты может включать лазерный источник, настроенный производить первую группу лазерного импульса; направляющая оптика, присоединенная к лазерному источнику, настроенному, чтобы направить первую группу лазерного импульса к заданной области катаракты в глазу; лазерный контроллер, формируемый для того, чтобы производить электронное изображение заданного сканирования шаблона и управлять направлением оптики, чтобы отсканировать первую группу лазерного импульса согласно части заданного сканирования шаблона для создания первой фоторазрушаемой области в заданной области катаракты; система изображения Спектральной Области Оптической Когерентной Томографии (СО-ОКТ), выполненная с возможностью для создания изображения части первой фоторазрушаемой области; и процессор изображений ОКТ, выполненный с возможностью для осуществления визуального анализа изображения, где лазерный контроллер настраивают, чтобы произвести электронное изображение измененного шаблона сканирования относительно визуального анализа, осуществленного процессором изображений ОКТ, и управлять направляемой оптикой, чтобы отсканировать вторую группу лазерного импульса согласно измененному шаблону сканирования для создания второй фоторазрушаемой области. В некоторых вариантах реализации система изображений может быть систему изображения Охватывающего Источника Оптической Когерентной Томографии (ОИ-ОКТ).
В некоторых вариантах реализации хирургическая система для удаления катаракты может включать хирургическую лазерную систему, выполненную с возможностью для создания хирургического лазерного луча и сканирования хирургического лазерного луча в заданной области катаракты; систему изображения Спектральной Области Оптической Когерентной Томографии (СО-ОКТ), выполненной с возможностью для создания изображения части заданной области катаракты; и процессор изображения ОКТ, выполненный с возможностью для осуществления визуального анализа изображения, обнаружения хирургическим путем нежелательной особенности в изображении и создания сигнала управления остановки или приостановки сканирования хирургического лазерного луча.
В некоторых вариантах реализации глазной хирургический метод может включать создание электронного изображения заданного шаблона сканирования для хрусталика глаза лазерным контроллером; создание и сканирование лазерного луча в хрусталике глаза согласно заданному шаблону сканирования хирургической лазерной системой, создавая рез в хрусталике; производя изображение части глаза и реза с системой изображения Спектральной Области Оптической Когерентной Томографии после того, как начинается сканирование лазерного луча; осуществление визуального анализа, произведенного изображения, с процессором изображения ОКТ; создание электронного изображения измененного шаблона сканирования лазерным контроллером относительно осуществленного визуального анализа; и создание и сканирование лазерного луча в хрусталике глаза согласно измененному шаблону сканирования хирургической лазерной системой, создание измененного реза.
В некоторых вариантах реализации метод катарактальной хирургии может включать управление сканированием лазерного луча в хрусталике глаза лазерным контроллером; создание изображений части хрусталика в количестве, по меньшей мере, 5 кадров в секунду системой изображения Спектральной Области Оптической Когерентной Томографии; осуществление анализа произведенных изображений процессором изображений ОКТ; и изменение сканирования лазерного луча лазерным контроллером вследствие анализа, осуществленного процессором изображений ОКТ.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Фиг. 1A иллюстрирует вариант реализации лазерной хирургические системы для удаления катаракты.
Фиг. 1B иллюстрирует изображение, способствующее фоторазрушению в заданной области хрусталика.
Фиг. 1C-D иллюстрирует вариант реализации лазерной хирургические системы для удаления катаракты.
Фиг. 2A-C иллюстрируют формирование первой и измененной второй фоторазрушаемой области.
Фиг. 3A-E иллюстрируют изменение сканируемых шаблонов после того, как был обнаружен побочный продукт операции.
Фиг. 4A-B иллюстрируют изменение сканируемых шаблонов после того, как был обнаружен побочный продукт операции.
Фиг. 4C-D иллюстрируют изменение сканируемого шаблона капсулотомии после расширения капсулы хрусталика.
Фиг. 5A-D иллюстрируют повторное сканирование неэффективной капсулотомии.
Фиг. 6 иллюстрирует вариант реализации системы изображения Спектральной Области Оптической Когерентной Томографии.
Фиг. 7 иллюстрирует вариант реализации системы изображения Спектральной Области Оптической Когерентной Томографии с заданной платой ввода-вывода.
Фиг. 8 иллюстрирует заданную плату ввода-вывода.
Фиг. 9 иллюстрирует вариант реализации системы изображения Спектральной Области Оптической Когерентной Томографии Стреловидного Источника.
Фиг. 10 иллюстрирует вспомогательное изображение метода операции по удалению катаракты.
Фиг. 11 иллюстрирует вспомогательное изображение метода операции по удалению катаракты.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Исполнения и варианты реализации в этом патентном документе описывают системы операций по удалению катаракты, которые производят своевременную обратную связь изображения, и для того, чтобы помогать хирургу корректировать операцию, основанную на обратной связи и для того, чтобы определять и выполнять такую корректировку самостоятельно.
Фиг. 1A иллюстрирует хирургическую систему для удаления катаракты 100, включая лазерный источник 110 для создания лазерного луча первой группы лазерных импульсов. Эти лазерные импульсы могут иметь продолжительность или длительность импульса в диапазоне 1-1,000 фемтосекунд или 1-1,000 пикосекунд. Энергия и мощность лазерного луча могут быть выбраны для того, чтобы эффективно достигнуть хорошо управляемого фоторазрушения в выбранной заданной области, не принося вред в других глазных тканях, таких как фоточувствительная сетчатка. Хирургическая система для удаления катаракты 100 может также включать направляющую оптику 120, присоединенную к лазерному источнику 110, чтобы направить первую группу лазерных импульсов через роговую оболочку 3 и переднюю камеру глаза 4 к хрусталику 5 глаза 1. Хрусталик 5 окутан капсулярным слоем или мешком 6. Направляющая оптика 120 может настраиваться для направления лазерного луча в заданную область катаракты через объектив 122 и стыковочный узел или интерфейс пациента (ИП) 124, который можно стыковать с глазом 1 и делать неподвижным относительно хирургических систем для удаления катаракты 100, применяя вакуумный захват. В некоторых вариантах реализации не может быть прямого или неподвижного соединения между объективом 122 и глазом 1. Эти варианты реализации могут использоваться вместо устройства отслеживания направления взгляда, чтобы коррелировать процесс изображения с возможными движениями глаза, например.
Заданная область катаракты может быть расположена в переднем отрезке глаза 1, который включает роговую оболочку 3, переднюю камеру глаза 4, хрусталик 5 и капсулярный мешок 6 глаза 1. Заданная область катаракты может быть, например, кругом, цилиндром или наклонным цилиндром в переднем капсулярном слое или капсулярном мешке хрусталика 5, когда выполняется капсулотомия. Заданная область катаракты может также быть большой объемной концентрацией хрусталика 5 для достижения фоторазрушения, дробления или лизиса хрусталика 5 или, по меньшей мере, его ядра. Заданная область катаракты может также быть в роговой оболочке 3, такой как надрез доступа для создания канала для ввода приборов операции по удалению катаракты. В более всесторонних катарактальных операциях, таких как рефракционная операция по удалению катаракты, дополнительные лимбальные послабляющие надрезы, или резы (ЛПР), или дугообразные резы могут также быть выполнены.
Капсулотомия может иметь диаметр в диапазоне 3-6 мм, что продиктовано конструкцией внутриглазного хрусталика, или ВГХ, введенного в сохраненную капсулу хрусталика на z-глубину в диапазоне 2-4 мм, где z-глубина измерена по оптической оси хирургические системы для удаления катаракты 100, используя поверхность контакта роговой оболочки 3 и ИП 124 в качестве нулевого контрольного уровня для z-глубины. Заданная область фоторазрушения хрусталика может простираться от z-глубины 2-4 мм до z-глубины 7-10 мм с диаметром 4-8 мм. В результате роговица ЛПР, дугообразный надрез и надрез доступа могут формироваться на z-глубине 0-2 мм большого диаметра 6-14 мм, чтобы минимизировать или в целом избежать непосредственного воздействия на поле зрения. Эти числовые диапазоны показывают, что трудности катарактальных операций существенно превышают просто роговичные операции, такие как ЛАСИК, или сетчаточные операции. И роговичные/ЛАСИК и сетчаточные операции выполняют в намного более узком диапазоне z-глубины и в намного меньшем полном хирургическом объеме, чем катарактальные операции. Роговичные операции обычно ограничиваются диапазоном z-глубины 0,1-0,5 мм, поскольку толщина роговой оболочки редко превышает 1 мм, а фоторазрушение обычно не перерезает всю роговую оболочку, чтобы держать переднюю камеру глаза неповрежденной. Обычные диаметры роговичных надрезов могут быть в диапазоне 2-3 мм. В то время как сетчаточные операции выполняются глубоко в задней камере глаза 1 на большой z-глубине, диапазон z-глубин, где формируются надрезы, обычно меньше 2 мм, важна полная толщина сетчаточных слоев.
В то же время катарактальные операции обычно включают фоторазрушение в большинстве или всех вышеописанных заданных областях катаракты, и в роговой оболочке 3, и в хрусталике 5. Вследствие этого катарактальные операции могут включать надрез в диапазоне z-глубины 4 мм или больше, иногда 6 мм или больше. Эти диапазоны z-глубины катаракты существенно больше, чем вышеупомянутые описанные диапазоны z-глубины роговичных или сетчаточных операций. К тому же, диаметр связанных с катарактой надрезов также существенно превышает роговичные надрезы. Вследствие этого формирование катарактальных надрезов бросает существенно более сильные вызовы конструкции хирургические системы для удаления катаракты, включая ее систему отображения, чем формирование роговичных надрезов бросает вызовы конструкции системы ЛАСИК, или формирование сетчаточных надрезов бросает вызовы конструкции системы операции по удалению сетчатки.
Хирургическая система для удаления катаракты 100 может также включать лазерный контроллер 130, чтобы производить электронное изображение сканирования заданного шаблона и управлять направляющей оптикой 120, чтобы сканировать первую группу лазерных импульсов согласно части сканирования заданного шаблона, чтобы создать первую фоторазрушаемую область в заданной области катаракты.
Как описано выше, заданная область катаракты может быть микрозазором переднего капсулярного слоя, а сканирование заданного шаблона может быть набором заданных точек на круге или цилиндре в переднем капсулярном слое хрусталика 5 для циклической капсулотомии, передней капсулотомии или нелинейной капсулотомии.
Или заданная область катаракты может быть частью хрусталика 5, а сканирование заданного шаблона может быть набором заданных точек на радиальных плоскостях дробления, цилиндрами, спиральным шаблоном или ажурным шаблоном для того, чтобы вызвать самостоятельное фоторазрушение хрусталика 5. Точки сканирования заданного шаблона могут быть определены, например, по их радиальным или (x, y, z) координатам. Эти координаты могут быть представлены с помощью электроники в процессоре, базирующемся на исполнимых файлах, храненных в соответствующей памяти лазерного контроллера 130.
Хирургическая система для удаления катаракты может также включать систему изображения Спектральной Области Оптической Когерентной Томографии (СО-ОКТ) 200 для создания изображения части первой фоторазрушаемой области, созданной сканированием хирургического лазерного луча. Система изображения СО-ОКТ 200 может настраиваться для внесения луча изображения в направляющую оптику 120, которая направляется в глаз 1, и получать отраженный луч изображения от направляющей оптики 120. Система изображения СО-ОКТ 200 может настраиваться для создания изображения или изображений первой фоторазрушаемой области во время операции, чтобы обеспечить своевременную или действенную обратную связь для хирурга или для лазерного контроллера 130, как подробно описано ниже.
Фиг. 1В иллюстрирует работу хирургические системы для удаления катаракты. Из приведенного примера видно, что лазерный контроллер 130 может производить электронное изображение сканирования заданного шаблона 302 в заданной области катаракты, дугу вблизи заднего капсулярного слоя. Направляющая оптика 120 может сосредоточить и отсканировать первую группу лазерных импульсов хирургического лазерного луча 304, произведенную лазерным источником 110, через точки сканирования заданного шаблона 302, чтобы создать первую фоторазрушаемую область 306. Первая фоторазрушаемая область 306 в этом примере может состоять из группы вздутий, или кавитационных вздутий, сформированных в точках сканирования заданного шаблона 302. После начала фоторазрушения система изображения СО-ОКТ 200 может отсканировать луч изображения 308 через заданную область катаракты для того, чтобы производить изображение первой фоторазрушаемой области 306. В некоторых исполнениях луч изображения 308 и хирургический лазерный луч 304 могут быть отсканированы или направлены той же разделенной направляющей оптикой 120. В других исполнениях только часть длины оптического пути может быть разделена, а луч изображения 308 может быть частично отсканирован дополнительной неразделенной оптикой, направляющей изображение. Все эти конструкции являются вариантами реализации направляющей оптики 120.
Если изображение, произведенное системой изображения СО-ОКТ 200, указывает, что процедура прогрессирует, как запланировано, например фоторазрушаемые вздутия 306 выполнены согласно шаблону целевого сканирования 302 и без неожиданных последствий, лазерный контроллер 130 может продолжить сканирование хирургического лазерного луча 304 вдоль первоначального шаблона целевого сканирования 302. Тем не менее, если изображение указывает, что есть отклонение от запланированной процедуры, лазерный контроллер 130 может ответить, производя электронное изображение измененного шаблона сканирования, и управлять направляющей оптикой 120, чтобы просканировать вторую группу лазерных импульсов согласно измененному шаблону сканирования, чтобы создать вторую фоторазрушаемую область, что будет иллюстрировано на последующих фигурах.
В некоторых вариантах реализации не может быть никакого прямого соединения между системой изображения СО-ОКТ 200 и лазерным контроллером 130. В этих вариантах реализации система изображения СО-ОКТ 200 может показать изображение первой фоторазрушаемой области 306 и оператор системы, такой как хирург, может ввести измененные параметры сканирования, чтобы заставить лазерный контроллер 130 производить электронное изображение измененного шаблона сканирования.
Фиг. 1A иллюстрирует, что в некоторых вариантах реализации система изображения СО-ОКТ 200 может включать процессор изображения ОКТ 201, который может анализировать произведенное изображение после начатого фоторазрушения. В некоторых вариантах реализации процессор изображения ОКТ 201 может показать результаты анализа для хирурга, чтобы обеспечить своевременную и действенную обратную связь во время операции, так чтобы хирург мог ввести измененный шаблон сканирования в лазерный контроллер 130. В примере Фиг. 1B процессор изображения ОКТ 201 может настраиваться для измерения расстояния первой фоторазрушаемой области 306 от заднего капсулярного слоя, и, если расстояние становится меньшим, чем установленный уровень безопасности, то он покажет предупреждающие сигналы хирургу.
В некоторых вариантах реализации система изображения СО-ОКТ 200 может быть присоединена к лазерному контроллеру 130, как на Фиг. 1A, или процессор изображения ОКТ 201 может быть самостоятельной единицей, непосредственно соединенной с системой изображения СО-ОКТ 200 и лазерным контроллером 130, как на Фиг. 1C. В этих вариантах реализации процессор изображения СО-ОКТ 201 может производить сигналы управления относительно изображения первой фоторазрушаемой области 306 и может применить произведенные сигналы управления к лазерному контроллеру 130, чтобы заставить лазерный контроллер 130 производить электронное изображение измененного шаблона сканирования. Процессор изображения ОКТ 201 может быть полностью или частично объединен с системой изображения СО-ОКТ 200, как на Фиг. 1A.
1D иллюстрирует, что в некоторых вариантах реализации процессор изображения ОКТ 201 может также накладываться или даже объединяться с лазерным контроллером 130. Варианты реализации Фиг. 1A, 1C и 1D иллюстрируют, что функции, связанные с программным обеспечением обработки изображения ОКТ и созданием измененного шаблона сканирования, могут частично или полностью выполняться многоцелевым процессором, который может быть размещен или в системе изображения СО-ОКТ 200, или в лазерном контроллере 130, или в блоке, объединяющем оба, или может быть самостоятельным блоком, отдельным от обоих.
Как упомянуто выше, необычно большой диапазон z-глубины операции по удалению катаракты, который может быть больше чем 4 мм или в некоторых вариантах реализации больше чем 6 мм, может требовать использования существенно более сложной системы изображения СО-ОКТ 200, чем та, которая используется в роговичных или сетчаточных системах. Соответственно, в некоторых вариантах реализации систему изображения СО-ОКТ 200 могут настраивать для того, чтобы иметь изображение или диапазон z-глубины Lмакс больше 4 мм, например в диапазоне 4-20 мм. В других вариантах реализации изображение или диапазон z-глубины Lмакс может быть больше 6 мм, например в диапазоне 6-10 мм.
Lмакс, изображение или диапазон z-глубины системы изображения СО-ОКТ 200 может зависеть от длины волны λ лазерного луча изображения 308, разрешения длины волны δλ, частоты Найквиста Nf, фокусной длины f и зрачка d системы изображения СО-ОКТ 200, как описано подробнее ниже. Соответственно, варианты реализации системы изображения СО-ОКТ 200 могут быть разработаны с параметрами λ, δλ, Nf, f и d такими, что изображение или диапазон z-глубины больше 4 мм или в некоторых вариантах реализации больше 6 мм.
Трудность увеличения диапазона глубины изображения системы от 1-2 мм до 4 мм или больше может быть также связана с фактом, что некоторые существующие системы, которые требуют диапазон изображения больше 2 мм, достигают этого без привлечения более продвинутой оптики, такой, которая будет предельно тверда. Вместо этого эти системы используют обычную систему изображения с диапазоном изображения меньше 2 мм и повышают диапазон изображения этой обычной системы, беря несколько изображений в смежных z-глубинах, отделенных примерно на 2 мм, и производят единственное изображение с большим диапазоном, объединяя изображения смежной глубины, используя сложное распознание изображения и обрабатывая схему. Такие системы могут быть сложной электроникой, а объединение изображений значительно замедляет скорость их работы. Чтобы избежать существенного замедления работы изображения и потребности в сложной электронике, выполнение системы изображения СО-ОКТ 200 достигает диапазона глубины отображения больше 4 или 6 мм, не объединяя два или больше изображения.
Для ясности отмечают, что принято различать между двумя типами изображения сканирований: A-сканирования и B-сканирования. A-сканирование относят к изображению цели в диапазоне z-глубин, соответствующих единственной поперечной (x, y) координате, в ссылающемся кадре, ось Z которой объединяют с оптической осью направляющей оптики 120. A-сканирование может быть получено направлением луча изображения системы изображения к единственной (x, y) целевой точке и сбором информации изображения, передающейся различным z-глубинам.
Некоторые системы изображения производят A-сканирование действительным сканированием диапазона z-глубины изображения и последовательной регистрацией данных изображения для различных z-глубин. Тем не менее, пока системы изображения СО-ОКТ, как объяснено ниже, одновременно собирают данные изображения для различных z-глубин, то есть без сканирования в z-направлении, их изображения все чаще относят к A-сканированиям.
B-сканирование относят к группе A-сканирований, которые соответствуют группе или линии (x, y) точек, собранных, поскольку луч изображения сканируют вдоль поперечной линии или в поперечном шаблоне сканирования. Типичное B-сканирование с постоянным (x, y) разрешением может включать 500-2000 A-сканирований. B-сканирование с высоким (x, y) разрешением может включать 1000-2000 A-сканирований. Особенно высокое (x, y) разрешение В-сканирований может включать 2000-5000 или 2000-16000 А-сканирований. Как правило, B-сканирование может включать эти A-просмотры, объединенные в поперечное, круглое или цилиндрическое изображение цели. Также B-сканирование может обеспечить существенно более детальную и, таким образом, существенно больше действенную информацию изображения обратной связи для хирурга, чем индивидуальное A-сканирование. Соответственно, в вариантах реализации хирургические системы для удаления катаракты 100 изображение первой фоторазрушаемой области и второй фоторазрушаемой области могут относить к B-сканированию, которое может включать 500-2000, 1000-3000, 2000-5000, или 2000-16000 A-сканирований.
Системы изображения ОКТ могут быть разделены на два класса: Временная Область, или системы изображения ВО-ОКТ, и Спектральная Область, или системы изображения СО-ОКТ. Системы изображения ВО-ОКТ используют луч света изображения с полосой пропускания, подходящей для определения длины коротких импульсов, и последовательно собирают информацию изображения с различных z-глубин в глубоком сканировании по оси Z. В то же время системы изображения СО-ОКТ используют луч света изображения с полосой пропускания, где спектральные компоненты с различной длиной волны захватывают и несут информацию изображения, представляя параллельно различные z-глубины в одно и то же время. Это позволяет системам изображения СО-ОКТ одновременно собирать информацию изображения с различных z-глубин, параллельно. Параллельное понимание информации z-глубины изображения ускоряет работу систем изображения СО-ОКТ фактором 10-1000, относительно системы изображения ВО-ОКТ. Эту более быструю работу систем изображения СО-ОКТ могут использовать в нескольких вариантах реализации, как описано дальше.
В сроках времени изображения эта ускоренная работа приводит к вариантам реализации системы изображения СО-ОКТ 200, способной производить изображение B-сканирования после начатого фоторазрушения, во время изображения, меньшего, чем время операции. Время изображения может быть меньше 1 секунды, например в диапазоне от 0,1 мсек до 1 сек. В некоторых вариантах реализации время изображения может быть меньше 0,1 секунды, например в диапазоне от 1 мсек до 0,1 сек. Это короткое время изображения означает, что система изображения СО-ОКТ 200 может производить изображения, которые могут обеспечить своевременную, и, таким образом, полезную обратную связь о прохождении операции по удалению катаракты для хирурга так, что хирург может изменить операцию вследствие обратной связи. Это изменение может включать введение в измененный шаблон целевого сканирования.
Следующий уровень использования, который предлагается некоторыми вариантами реализации системы изображения СО-ОКТ 200, может обеспечить изображения обратной связи не только один раз, но и неоднократно во время операции по удалению катаракты. Такие системы могут обеспечить ценную своевременную обратную связь относительно развития, местоположения и роста первой фоторазрушаемой области 306, таким образом, предлагая качественное усовершенствование точности, работы и безопасности хирургические системы для удаления катаракты 100.
Некоторые варианты реализации СО-ОКТ 200 могут предложить дальнейшие качественные усовершенствования. Они могут обеспечить не только несколькими обновленными изображениями во время операции по удалению катаракты, но и практически реальными изображениями проходящей операции. Практически реальная обратная связь может доставить очень ценную, своевременную и действенную информацию для хирурга, чтобы контролировать проходящую операцию, улучшать хирургическую точность, рано обнаруживать нежелательные результаты и реагировать на них в режиме реального времени.
Часто используемая скорость обновления видео в реальном времени 24 кадра в секунду. Поэтому системы изображения, которые могут предоставить изображения со скоростью обновления или скорость передачи кадра 20-25 кадров в секунду или больше, могут предоставить изображения, которые будут казаться весьма реальными для хирурга. Принимая во внимание, что системы со скоростью передачи кадра или скоростью обновления значительно меньше чем 20-25 кадров в секунду не могут быть восприняты как изображения видео в реальном времени, а скорее, как прерывистые, вздрагивающие изображения, возможно, даже отвлекая хирурга от операции по удалению катаракты.
В этом контексте так как системы изображения ВО-ОКТ последовательно приобретают информацию изображения z-глубины, они способны производить B-сканирования только низкого разрешения со скоростью обновления только один или несколько кадров в секунду. Системы изображения ВО-ОКТ, которые, как ожидают, предоставят изображения с более высоким разрешением, будут вынуждены сканировать и обновлять изображения с еще более низкой скоростью, значительно ниже одного кадра в секунду. Такие отчетливо более медленные, чем реальные изображения обратной связи кажутся прерывистыми хирургу и могут даже отвлекать. Кроме того, медленная скорость сканирования и медленная скорость обновления результатов могут побудить некоторые системы изображения ВО-ОКТ к показу искажений, таких как последовательные или прерывистые скачки в изображении слоя, который в действительности является гладким.
В то же время системы СО-ОКТ одновременно собирают данные изображения в (x, y) точках со всех z-глубин, параллельно. Эти изображения иногда называют A-сканирования, даже при том что не включают никакое последовательное z-сканирование. Из-за параллельного или одновременного характера сбора данных изображения с различных глубин варианты реализации системы СО-ОКТ 200 могут приобрести A-сканирования в 10-1000 раз быстрее, чем системы изображения ВО-ОКТ, как отмечалось выше. В частности, качественные системы изображения СО-ОКТ 200 могут приобретать 10000-100000 A-сканирований в секунду, или эквивалентно, могут иметь скорость обегания A-сканирования 10-100 кГц. Высококачественные системы изображения СО-ОКТ 200 могут иметь скорость обегания A-сканирования 30-300 кГц, а особенно высококачественные системы изображения СО-ОКТ 200 могут иметь скорость обегания A-сканирования 100 кГц-1000 кГц, намного превышая скорость обегания A-сканирования, которая может быть достигнута системой изображения ВО-ОКТ.
Очевидно, что скорость обегания A-сканирования, или количество A-сканирований в секунду, приблизительно равно количеству раз A-сканирования/B-сканирования, количеству изображений в секунду, скорости обновления изображения. Например, при качественной скорости обегания A-сканирования 10000-100000 A-сканирований в секунду, или 10-100 кГц, изображения с постоянным (x, y) разрешением 500-2000 A-сканирований/B-сканирований могут быть охвачены со скоростью обновления изображения в диапазоне 5-200 кадров в секунду, которая включает диапазон скорости обновления 20-200 кадров в секунду. В другом примере при высококачественной скорости обегания A-сканирования 30-300 кГц изображения с высоким (x, y) разрешением 1000-3000 A-сканирований/B-сканирований могут быть охвачены со скоростью обновления изображения в диапазоне 10-300 кадров в секунду, которая включает диапазон 25-300 кадров в секунду. И наконец, в особо высококачественном диапазоне обегания A-сканирования 100-1000 кГц изображения с особо высоким (x, y) разрешением 2000-5000 A-сканирований/B-сканирований могут производить со скоростью обновления изображения в диапазоне 25-500 кадров в секунду.
Эти примеры показывают, что варианты реализации систем изображения СО-ОКТ 200 с различными соединениями качественных скоростей обегания A-сканирования и отношения разрешений A-сканирования/B-сканирования могут обеспечить изображение, скорости обновления которого определенно выше 20 кадров в секунду предельной скорости видео в реальном времени, и, таким образом, предлагают качественные преимущества перед системами изображения ВО-ОКТ.
Отмечают, что варианты реализации системы изображения СО-ОКТ 200 могут использовать со скоростью обновления изображения ниже, чем скорость видео в реальном времени, обычно при использовании с особо высоким разрешением и правильным качеством скорости обегания A-сканирования. Такие варианты реализации могут использовать, когда оператор системы изображения СО-ОКТ 200 по медицинским причинам требует особо высоких настроек разрешения, предшествуя способности скорости видео в реальном времени системы изображения СО-ОКТ 200.
Полное количество данных изображения могут также охватывать другими способами. Определенные параметры дизайна системы изображения СО-ОКТ 200, такие как полная длина ее датчиков, управляющих расстоянием z-направления разрешенных точек, z-разрешение. Это z-разрешение может быть, например, 5 микрон расстояния z-направления между точками данных, преобразовывая в 1000 точек z-глубины в обычном Lмакс=5 мм диапазон z-глубины. В варианте реализации постоянного (x, y) разрешения, где B-сканирование содержит 500-2000 A-сканирований, часто разделенных также примерно на 5 микрон в (x, y) плоскости, этот вариант реализации может производить изображение с разрешением изображения 0,5-2 миллиона пикселей на каждое изображение. Другие варианты реализации способны охватывать изображения с разрешением изображения 1-3 миллиона, 2-5 миллионов или даже 2-10 миллионов изображений точек на кадр, при этом обеспечивая изображения со скоростью видео в реальном времени 20-200, 25-300 или 25-500 кадров в секунду или быстрее.
Из-за этих существенно высоких (x, y) разрешений изображения и z-разрешений варианты реализации системы изображения СО-ОКТ 200 могут охватывать и показывать сложные, точные и детальные изображения. Например, B-сканирования могут включать сканирование хрусталика 5 вдоль нескольких кругов, радиальных лучей, спиралей и двуразмерных (2D) поперечных или боковых сеток сканирования в (x, y) плоскости. Эти детальные изображения позволяют системе изображения СО-ОКТ 200 планировать фактическую форму хрусталика 5 вместо того, чтобы использовать модели и полагаться на предположения о ее геометрии и форме.
Как отмечено здесь, показ изображений ОКТ также занимает время. Таким образом, скорость обновления показа изображения, ограниченного скоростью электронной работы дисплейного блока системы изображения СО-ОКТ 200, могла бы быть ниже, чем скорость блока обегания изображения ОКТ. В этом контексте вышеупомянутые скорости обновления характеризуют скорость обегания изображения системой изображения СО-ОКТ 200, не скорости показа дисплейного блока, который может быть медленнее, в зависимости от ограничивающих факторов электронной передачи и передачи данных.
Учитывая, что скорости изображения систем изображения СО-ОКТ и ВО-ОКТ находится на противоположных сторонах скорости видео в реальном времени 20-25 кадров в секунду, варианты реализации хирургические системы для удаления катаракты, которые включают систему изображения СО-ОКТ 200, могут быть способны к обеспечению своевременной и точной информацией обратной связи в реальном времени для хирурга, которые свободны от искажений движения, тогда как те, которые используют обычные системы изображения ВО-ОКТ, не способны к обеспечению такой точной обратной связи в реальном времени для хирурга и склонны показывать искажения движения.
Заключительный фактор, оказывающий влияние на долгосрочное выполнение варианта реализации системы изображения СО-ОКТ 200, - то, что системы изображения СО-ОКТ не имеют двигающихся частей и, таким образом, их надежность и эксплуатационная надежность весьма удовлетворительны. В то же время системы ВО-ОКТ имеют быстро двигающиеся части, связанные с движением зеркала опорного луча в опорном плече аппарата ВО-ОКТ. Очевидно, что присутствие двигающихся частей в системах ВО-ОКТ увеличивает шанс на сбой и некоаксиальность, таким образом, возможно, уменьшая их полную работу, требуя более частого технического обслуживания и сталкиваясь с более высокой вероятностью долгосрочной деградации работы.
В итоге, системы изображения СО-ОКТ качественно отличаются от систем ВО-ОКТ, особенно для катарактального применения, по меньшей мере, по следующим причинам. (1) Системы изображения СО-ОКТ настраивают для обеспечения изображения в реальном времени, или изображения обратной связи со скоростью обновления 20-200, 20-300, или 20-500 кадров в секунду, полезного для процессов операции по удалению катаракты высокой точности, тогда как системы ВО-ОКТ- нет. (2) Системы изображения СО-ОКТ могут обеспечить изображения со скоростью видео в реальном времени с высоким (x, y) разрешением 500-2000, 1000-3000, или 2000-5000 A-сканирований/B-сканирований или выше, тогда как системы изображения ВО-ОКТ не могут. (3) Системы изображения СО-ОКТ могут использовать с качественной скоростью обегания A-сканирования 10-100 кГц, 30-300 кГц, или 100-1000 кГц, тогда как система ВО-ОКТ не могут. (4) Системы изображения СО-ОКТ хорошо подходят для обеспечения детального изображения с высоким разрешением изображения со скоростью видео в реальном времени 0,5-2, 1-3 или 2-5 миллионов точек изображения, тогда как система ВО-ОКТ - нет. (5) Системы изображения СО-ОКТ могут обеспечить изображения, настолько детальные, что полное изображение хрусталика 5 может быть сформировано без использования модели хрусталика 5, тогда как система ВО-ОКТ не может. (6) Системы изображения СО-ОКТ обычно не показывают искажения движения, тогда как системы ВО-ОКТ делают это. (7) И наконец, системы изображения СО-ОКТ требуют только нечастого технического обслуживания и обслуживания, только каждые 6 или 9 месяцев, тогда как системы изображения ВО-ОКТ с их перемещающимися частями обычно требует field service и обслуживания намного чаще.
Преимущество системы изображения СО-ОКТ 200, обеспечивающей одно или более изображений обратной связи или видео обратной связи всей целевой области катаракты и в особенности первой фоторазрушаемой области 306, - это то, что хирург может реагировать на обратную связь и изменять операцию, производя измененный шаблон сканирования в ответ на обеспеченные изображения или видео обратной связи. Измененный шаблон сканирования могут производить различными способами после того, как лазерный контроллер 130 произведет электронное изображение первоначального шаблона целевого сканирования 302 согласно начальным вводным данным, полученным от оператора системы.
В некоторых вариантах реализации лазерный контроллер 130 может производить электронное изображение измененного шаблона целевого сканирования согласно измененным вводным данным, также полученных от оператора системы. В таких вариантах реализации измененные вводные данные могут быть произведены оператором системы в ответ на анализ изображения части первой фоторазрушаемой области 306. Например, хирург может изучить изображение первой фоторазрушаемой области 306, обнаружить формирование нежелательного газового вздутия, которое чрезмерно бы рассеял хирургический лазерный луч и привел бы к созданию измененного шаблона сканирования, который очищает хирургический лазерный луч 304 от газового вздутия.
В других вариантах реализации система изображения СО-ОКТ 200 может показать метки калибровки, чтобы помочь хирургу или оператору системы калибровать место первой фоторазрушаемой области 306 относительно шаблона целевого сканирования 302. Такие метки калибровки могут быть связаны с характерными точками изображения, такими как вершины роговой оболочки 3 или хрусталика 5.
В еще одних вариантах реализации система изображения СО-ОКТ 200 может включать процессор изображения ОКТ 201. Процессор изображения ОКТ 201 может анализировать изображение первой фоторазрушаемой области 306 и показывать обратную связь для оператора системы. Например, если процессор изображения ОКТ 201 чувствует неправильную калибровку, то есть первая фоторазрушаемая область 306 сформирована на расстоянии от того места, где требует шаблон целевого сканирования 302, он может посылать сигнал обратной связи неправильной калибровки, который может затем решить остановить операцию и повторно калибровать систему или ввести измененный шаблон сканирования, который компенсирует расстояние неправильной калибровки.
В еще одних вариантах реализации системы изображения СО-ОКТ 200 могут получить возвратное изображения, прежде чем произведут первую группу хирургических лазерных импульсов, а изображение обратной связи после того, как первая группа лазерных импульсов произведет первую фоторазрушаемую область 306. Процессор изображения ОКТ 201 может определить различия между двумя изображениями и показать признаки этих различий. Определенные и показанные различия могут позволить хирургу или процессору изображения ОКТ 201 контролировать проходящую операцию по удалению катаракты, отслеживать несоответствия относительно шаблона целевого сканирования 302, включая появление незаданных побочных продуктов операции, таких как временные газовые вздутия, и приводить к созданию измененного шаблона сканирования в ответ на изображение и показанные различия.
И наконец, в некоторых вариантах реализации процессор изображения ОКТ 201 может играть более продвинутую и активную роль. Например, процессор изображения ОКТ 201 может активно анализировать изображение первой фоторазрушаемой области 306 и производить сигнал управления для того, чтобы принудить лазерный контроллер 130 производить электронное изображение измененного шаблона сканирования без необходимости ожидания от хирурга измененных вводных данных. Например, если процессор изображения ОКТ 201 обнаруживает неизбежную ситуацию высокого риска, такую как, если первая фоторазрушаемая область сформирована слишком близко к заднему капсулярному слою, то это может остановить операцию по удалению катаракты, не ожидая результата медленного и отнимающего много времени взаимодействия с хирургом.
Вышеупомянутые пять вариантов реализации могут объединять различными способами. Например, после определения по изображению, что ситуация высокого риска неизбежна, процессор изображения ОКТ 201 может и показать сигнал обратной связи для хирурга, и подготовить сигнал управления для лазерного контроллера 130 для того, чтобы остановить операцию. Процессор изображения ОКТ 201 может затем ждать измененных вводных данных от хирурга в течение заданного времени. В отсутствие таких измененных вводных данных в заданное время процессор изображения ОКТ 201 может продолжить действие самостоятельно, чтобы предотвратить надвигающуюся ситуацию высокого риска и послать сигнал управления лазерному контроллеру 130, чтобы остановить операцию без дальнейшего ожидания вводных данных от хирурга.
Фиг. 2A-B иллюстрируют особый пример лазерного контроллера 130, планирующий шаблон целевого сканирования 302 в задней области хрусталика 5. Хирургическая система для удаления катаракты 100 может применять хирургический лазерный луч 304 согласно шаблону целевого сканирования 302, создавая первую фоторазрушаемую область 306. Тем не менее, последующее изображение первой фоторазрушаемой области 306 с лазерным лучом изображения 308 может показать, что первая фоторазрушаемая область 306, возможно, была сформирована в неправильном месте отклонением 310 от ее заданного шаблона целевого сканирования 302. Отклонение 310 может быть отклонением местоположения, ориентацией или формой первой фоторазрушаемой области 306 относительно шаблона целевого сканирования 302. Это неправильное положение или неправильная калибровка может произойти по различным причинам: ошибочные вводные данные хирурга, созданная неточность процесса создания направляющей оптики 120, тепловое расширение компонентов, передвижение пациента после начального изображения, деформация глаза, вызванного давлением интерфейса пациента 124, или неправильная характеристика преломляющихся свойств глаза 1 во время дооперационного диагностического процесса и другие.
Фиг. 2В иллюстрирует, что в некоторых вариантах реализации система изображения СО-ОКТ 200 может показывать изображение обратной связи шаблона целевого сканирования 302 и изображение первой фоторазрушаемой области 306 без анализа. Из этого изображения обратной связи хирург может визуально определить отклонение 310 и ввести компенсирующие измененные вводные данные, чтобы привести лазерный контроллер 130 к измененному шаблону сканирования 312. В других вариантах реализации система изображения СО-ОКТ 200 может показывать метки калибровки, чтобы помочь хирургу в анализе.
В других вариантах реализации процессор изображения ОКТ 201 может определить отклонение 310. Затем в некоторых вариантах реализации процессор изображения ОКТ 201 может показать определенное отклонение 310, так же как и обратную связь и рекомендацию для хирурга, такие как предложенные величина и направление перемещения шаблона сканирования, или знак предупреждения для хирурга. В этих вариантах реализации хирург может вводить измененные вводные данные в лазерный контроллер 130, чтобы побудить к созданию измененного шаблона сканирования 312 с целью уменьшения отклонения 310 к уменьшенному отклонению 310r. В других вариантах реализации процессор изображения ОКТ 201 может непосредственно сигнализировать лазерному контроллеру 130 производить электронное изображение измененного шаблона сканирования 312, чтобы уменьшить определенное отклонение 310 до уменьшенного отклонения 310r, не ожидая измененных вводных данных от хирурга.
Фиг. 2B иллюстрирует, что создание измененного шаблона сканирования 312 может учитывать неправильную калибровку направляющей оптики 120 в любом из вышеупомянутых вариантов реализации. Измененный шаблон сканирования 312 может быть перемещен из шаблона целевого сканирования 302 при помощи неправильной калибровки направляющей оптики 120, так что, когда хирургический лазерный луч 304 формирует вторую фоторазрушаемую область 314, неправильно помещенную из измененного шаблона сканирования 312 из-за неправильной калибровки направляющей оптики 120, вторая фоторазрушаемая область 314 обрывается близко к первоначально заданному шаблону целевого сканирования 302, уменьшая отклонение 310 до уменьшенного отклонения 310r.
Фиг. 2С иллюстрирует связанный вариант реализации, где процессор изображения ОКТ 201 может определить, была ли первая фоторазрушаемая область 306 сформирована или простиралась по ошибке в область риска 316. Первая фоторазрушаемая область 306, сформированная в области риска 316, подвергает опасности целостность заднего капсулярного слоя и может нарушить его, прокалывая капсулу 6 и требуя сложной процедуры витректомии. Это существенно подняло бы риск операции по удалению катаракты.
Чтобы определить такое нарушение, в различных вариантах реализации процессор изображения ОКТ 201 может анализировать изображение обратной связи, или изображения, или чрезвычайно реальное изображение системы изображения СО-ОКТ 200, чтобы проконтролировать, была ли первая фоторазрушаемая область 306 сформирована слишком близко к или в заднем капсулярном слое, в области риска 316. Если процессор изображения ОКТ 201 чувствует, что первая фоторазрушаемая область 306 была сформирована в этой области риска 316, то процессор изображения ОКТ 201 может или показывать опасную обратную связь для хирурга, или может производить сигнал управления для лазерного контроллера 130, чтобы побудить к созданию измененного шаблона сканирования 312. Во всех вышеупомянутых вариантах реализации лазерный контроллер 130 может производить измененный шаблон сканирования 312 и направлять хирургический лазерный луч 304 соответственно, чтобы выполнить вторую фоторазрушаемую область 314 внешней стороны область риска 316.
В некоторых вариантах реализации процессор изображения ОКТ 201 и лазерный контроллер 130 могут быть частично или полностью объединены. Например, один объединенный процессор может выполнять и функцию обработки изображения процессора изображения ОКТ 201 и функцию создания шаблона сканирования лазерного контроллера 130.
Фиг. 3A-E иллюстрируют вариант реализации, где шаблон целевого сканирования 302 является шаблоном дробления. В некоторых случаях катарактальный хирург может выбирать дробление хрусталика на 2, 4 или 6 частей, чтобы облегчить их удаление или всасывание через капсулотомию.
Фиг. 3A-B иллюстрируют, что в стадии проекта операции по удалению катаракты после получения соответствующих вводных данных от хирурга лазерный контроллер 130 может производить шаблон целевого сканирования 302, который состоит из точек на двух плоскостях дробления, сформированных, например, в (x, z) и (y, z) плоскостях. В идеальной операции по удалению катаракты, когда первую группу лазерных импульсов применяют к этому шаблону целевого сканирования 302, произведенная первая фоторазрушаемая область 306 включает четыре плоскости дробления, раскалывая хрусталик на четыре сегмента вдоль этих плоскостях дробления.
Фиг. 3C-D иллюстрируют, что в неидеальных случаях, после того как первую группу лазерных импульсов хирургического лазерного луча 304 направляют к точкам шаблона целевого сканирования 302, а первая фоторазрушаемая область 306 начинает формироваться, незаданный побочный продукт операции 320 может также формироваться. Этот побочный продукт операции 320 может быть группой недавно сформированных вздутий фоторазрушения, соединяющихся в одно большое вздутие, которое может рассеивать или перенаправлять последующий лазерный импульс в незаданном направлении, например к сетчатке, возможно, принося вред и фототоксичность. Поэтому точность процесса фоторазрушения может уменьшаться, и его риск может увеличиваться, если последующий лазерный импульс направлен в газовое вздутие 320.
Такое незаданное развитие могут определять процессором изображения ОКТ 201, который может распознать формирование газового вздутия или другого побочного продукта операции 320 от анализа изображений системы изображения СО-ОКТ 200. И так как изображения СО-ОКТ могут производить при существенной скорости в реальном времени, процессор изображения ОКТ 201 может передавать это распознание, как своевременная и действенная обратная связь и для хирурга, и для лазерного контроллера 130, подсказывая ответ изменения, как описано далее.
Фиг. 3C-D иллюстрируют, что обратная связь может принимать форму процессора изображения ОКТ 201, анализируя изображение, определяя рекомендованную степень вращения шаблона дробления и показывая рекомендованный вращаемый шаблон дробления для хирурга, чтобы ввести соответствующие измененные вводные данные. В других вариантах реализации процессор изображения ОКТ 201 может применять сигнал управления непосредственно к лазерному контроллеру 130, чтобы производить электронное изображения вращаемого шаблона дробления, поскольку измененный шаблон сканирования 312, такой как вращаемый шаблон дробления 312, не покрывается газовым вздутием 320. Вращаемый шаблон дробления 312 может простираться через весь диапазон z-глубины хрусталика 5, в действительности запуская процедуру, или может быть частичным шаблоном дробления, продолжая отрезание из z-глубины, где был оставлен первоначальный шаблон целевого сканирования 302.
Фиг. 3E иллюстрирует, что процессор изображения ОКТ 201 мог порекомендовать направлять хирургический лазерный луч 304 к точкам измененного или вращаемого шаблона сканирования 312, чтобы выполнить вторую или вращаемую, или измененную фоторазрушаемую область 314, которая не покрывает соединенным вздутием 320. Этот вариант реализации таким образом избегает хирургического лазерного луча 304, рассеиваемого в незаданном направлении, уменьшая риск операции по удалению катаракты.
Фиг. 4A иллюстрирует альтернативный вариант реализации формирования измененного, или неперекрываемого шаблона сканирования 312 в ответ на ощущение появления побочного продукта операции 320 процессором изображения ОКТ 201. Здесь измененный или не перекрываемый шаблон сканирования 312 не включает вращаемые плоскости дробления. Вместо этого хирургический лазерный луч 304, сканированный согласно неизменному шаблону целевого сканирования 302, избегает перекрывания, но лазерный контроллер 130 гасит лазерные импульсы, которые направляют в побочное вздутие операции 320. Лазерный контроллер 130 может отпирать лазерные импульсы, чтобы сразу поразить все точки шаблона целевого сканирования 302, сканирования, перемещаемого за побочным вздутием операции 320.
Фиг. 4В иллюстрирует еще один вариант реализации, где процессор изображения ОКТ 201 сразу распознает, что продолжение сканирования хирургического лазерного луча 304 вдоль первоначального шаблона целевого сканирования 302 создало бы первую фоторазрушаемую область 306, перекрывая побочным вздутием операции 320, анализируя изображения обратной связи или поток скорости изображения в реальном времени системы изображения СО-ОКТ 200, это может просто остановить сканирование хирургического лазерного луча 304. В некоторых вариантах реализации после остановки процессор изображения ОКТ 201 или лазерный контроллер 130 могут показывать подсказку для оператора системы, требуя измененных вводных данных или корректирующих действий.
В некоторых сценариях операции многократные вздутия 320-i могут формироваться более или менее одновременно. Поэтому некоторые варианты реализации хирургических систем для удаления катаракты 100 могут настраивать, чтобы производить измененный шаблон сканирования 312, который одновременно избегает многократных вздутий.
Фиг. 4C-D иллюстрируют, что в некоторых вариантах реализации процессор изображения ОКТ 201 могут настраивать, чтобы анализировать часть изображения, которое отличается от первой фоторазрушаемой области 306, и производить обратную связь, основанную на этом анализе. В этом специфическом примере формирование первой фоторазрушаемой области 306 может побудить хрусталик 5 и, таким образом, капсулу хрусталика 6 расширяться, как обозначено стрелкой. Система изображения СО-ОКТ 200 может изображать этот расширенный задний капсулярный слой 322. Процессор изображения ОКТ 201 может анализировать это изображение и определять изменение местоположения расширенного заднего капсулярного слоя 322.
Знание местоположения заднего капсулярного слоя важно для операции по удалению катаракты, потому что в некоторых вариантах реализации шаблон целевого сканирования капсулотомии 324 помещен, чтобы прорезать задний капсулярный слой. Если шаблон целевого сканирования капсулотомии 324 помещают согласно изображению, взятому перед капсулярным расширением, то хирургический лазерный луч 304 будет пытаться создавать капсулотомию в неправильном местоположении.
Фиг. 4D иллюстрирует, что для препятствования этому случаю процессор изображения ОКТ 201 может определить изменение местоположения расширенного заднего капсулярного слоя 322 и показать это изменение оператору системы, чтобы ввести измененные вводные данные в лазерный контроллер 130 или дать сигнал об этом изменении непосредственно лазерному контроллеру 130, в любом случае, чтобы побудить лазерный контроллер производить измененный шаблон сканирования капсулотомии 326, который должным образом производит капсулотомию в расширенной капсуле.
Фиг. 5A-D иллюстрируют другой вариант реализации, связанный с формированием лазерно-стимулированной капсулотомии или реза. В этом варианте реализации процессор изображения ОКТ 201 может анализировать повторные изображения обратной связи или изображения движущиеся в реальном времени и идентифицировать неразрезанную часть или "наконечник" 330 в первой фоторазрушаемой области 306, где эффективность фоторазрушения была ограничена и, таким образом, задняя капсулярная мембрана не была полностью прорезана, оставляя позади неразрезанную часть или "наконечник" 330. Такие наконечники 330 могут поднять риск разрывания капсулы или капсулярной мембраны, когда капсулярное веко или покрытие удалены хирургом. Чтобы предотвратить такой нежелательный или высокий результат риска, процессор изображения ОКТ 201 может и показать рекомендацию хирургу, как удалить наконечник 330, сканируя вдоль дополнительного измененного шаблона сканирования 312, и может подать сигнал управления непосредственно лазерному контроллеру 130, чтобы производить электронное изображение измененного шаблона сканирования 312, чтобы повторно просмотреть по меньшей мере наконечник 330, чтобы производить пересканированную область наконечника 332, как вторую фоторазрушаемую область 314. С этим пересканированием первая фоторазрушаемая область 306 и вторая фоторазрушаемая область 314 могут выполнить всю фоторазрушаемую область 334, в этом случае полная капсулотомия 334 позволяет хирургу удалять капсульное веко или покрытие с минимальным риском разрыва.
Фиг. 6 иллюстрирует, что некоторые варианты реализации системы изображения СО-ОКТ 200 могут включать систему изображения ОКТ на Основе Спектрометра (ОС-ОКТ) 200, которая включает широкополосный источник излучения 210, чтобы производить широкополосное излучение или лазерный луч. Широкополосной луч может иметь среднюю длину волны λ0 и относительно широкий диапазон частот Wисточник. В некоторых типичных примерах λ0 может быть в диапазоне 800-1100 нм и Wисточник может быть в диапазоне 10-150 нм.
Широкополосной сети может быть объединен в систему направления луча 211, который может включать 1-й расщепитель луча 212. 1-й расщепитель луча 212 может расщепить широкополосный луч на луч изображения 222 и опорный луч 224. Луч изображения 222 может направляться 2-м расщепителем луча 214 в главной оптической дорожке направляющей оптики 120, а оттуда через объектив 122 и, возможно, интерфейс пациента 124 - к глазу 1. Система направления луча 211 может также направлять возвратный луч изображения 222r от глаза 1 к 1-му расщепителю луча 212. Луч изображения 222 и возвратный луч изображения 222r предварительно совместно именуются как лазерный луч изображения 308.
Кроме того, система направления луча 211 может направлять опорный луч 224 к зеркалу опорного луча 216, направлять возвратный опорный луч 224r от зеркала опорного луча 216 и комбинировать возвратный луч изображения 222r и возвратный опорный луч 224r в комбинированный луч 226 в 1-м расщепителе луча 212. Комбинированный луч 226 несет информацию изображения из глаза 1 при контакте возвратного луча изображения 222r и возвратного опорного луча 224r. Некоторые варианты реализации могут использовать другие типы замедлителей вместо или одновременно с зеркалом опорного луча 216. Другие могут использовать еще один расщепитель луча, чтобы объединить возвратный луч изображения 222r и возвратный опорный луч 224r. В некоторых вариантах реализации система направления луча 211 может включать интерферометр Маха-Цендера. Такие системы могут иметь подходящие свойства шумопоглощения.
Системы изображения СО-ОКТ охватывают последовательно данные изображения из различных z-глубин в диапазоне z-изображения, перемещая зеркало опорного луча 216 в соответствующем диапазоне расстояния для каждой (x, y) точки отдельно, фактически подобно интерферометру Михельсона-Морли. В то же время системы изображения СО-ОКТ используют различные спектральные компоненты широкополосного излучения изображения, чтобы параллельно охватить данные изображения с различных z-глубин. Системы изображения СО-ОКТ могут подразумевать столько же интерферометров Михельсона-Морли(ММ), работающих параллельно на различных длинах волн. Так как системы ММ, работающие на различных длинах волны, изображают глаз 1 в различных z-глубинах, комбинированный луч 226 из системы СО-ОКТ 200 несут данные изображения или информацию из всех z-глубин глаза 1 одновременно и, таким образом, не требуют движения или сканирования любого механического компонента системы, такого как зеркало опорного луча 216. Как отмечалось выше, это отсутствие механического сканирования для систем СО-ОКТ передается с ускорением скорости изображения фактором, по меньшей мере, 10 или более, типично 100-1000, относительно системы изображения ВО-ОКТ.
Система изображения СО-ОКТ 200 может также включать камеру ОКТ 230, выполненную с возможностью, чтобы получать комбинированный луч 226. Чтобы извлечь информацию изображения из всех z-глубин, комбинированный луч 226 может быть разбит на спектральные компоненты спектральным разложителем 231, таким как призма или растр. Каждый спектральный компонент с δλ диапазоном частот вокруг длины волны λ и информация контакта, которую они несут, может ощущаться параллельно индивидуальными датчиками сенсорной решетки 232, датчики, отделенные расстоянием d’ друг от друга. Информация контакта, ощущаемая датчиками индивидуально, может затем использоваться, чтобы восстановить изображение полного диапазона z-глубины системы Быстрое Преобразование Фурье (БПФ) 233, чтобы производить преобразование Фурье из чувствительных спектральных компонентов. В действительности, данные или информация контакта, которую несут различные компоненты длины волны, могут передавать в одновременное или чрезвычайно мгновенное "z-сканирование" изображенного диапазона z-глубины. Передача данных контакта в данные "z-сканирования" может быть выполнена генератором изображения 234, чтобы производить и получать изображение ОКТ с преобразованием Фурье чувствительных спектральных компонентов.
Некоторые варианты реализации камеры ОКТ 230 могут использовать ПЗС (прибор с зарядовой связью) пиксели как датчики сенсорной решетки 232. Другие варианты реализации могут достигнуть улучшенных скоростей считывания, используя КМОП-датчики. В таких вариантах реализации КМОП-датчики могут считывать параллельно. К тому же в вариантах реализации КМОП возможно считывать только интересующие датчики или пиксели или заранее отобранные до изображения, или отобранные в реальном времени, учитывая, изменилось ли их содержание из-за отображения. Оба эти аспекта делают пиксели КМОП весьма полезными для ускорения работы камеры ОКТ 230.
Используя стандартный оптический анализ, критическое изображение и параметры работы системы СО-ОКТ 200 могут характеризовать ее архитектурные и проектные параметры следующим образом. Так как спектральный разложитель 231 направляет компоненты различной длины волны комбинированного луча 226 в немного отличающихся направлениях, чем меньше и более плотно упакованы индивидуальные датчики или пикселы (меньше d’), тем уже δλ диапазоны длины волны/спектра устраненные камерой ОКТ 230. Другое количество, определенное δλ помимо плотности пикселя, это полный диапазон длин волны, то есть частота диапазонов Wкамеры камеры ОКТ 230. По простой договоренности δλ пропорционален частоте диапазонов Wкамеры и обратно пропорционален количеству пикселей в ряде сенсорной решетки 232.
Важный диапазон z-глубины изображения, или диапазон z-изображения, Lмакс глубоко связан с δλ: чем уже δλ диапазоны длины волны, тем шире диапазон изображения в z направление, потому что эти два количества связаны инвертированием преобразователя Фурье. В частности, теоретический максимум диапазона изображения дается в
Здесь значение λ0 относится к средней или центральной длине волны широкополосного источника излучения 210, и Nf обозначает частоту Найквиста камеры ОКТ 230. В действительности дополнительные факторы могут ограничить эффективный диапазон изображения ниже этого теоретического максимума, например отношение сигнала к шуму. Поэтому эффективный диапазон изображения обычно меньше, чем эта теоретическая величина Lмакс.
Один фактор, который может ограничить диапазон изображения, - это диапазон Рэлея R. R может быть выражен, используя Δx, разрешение в поперечном x направлении, или “поперечное разрешение”, управляться числовой апертурой NA и длиной волны λ0 источника излучения 210. Определенно, Δx может быть выражено как:

где f - фокусная длина, а d - зрачок объектива 122, их отношение, определяющее NA Использование Δx, вышеупомянутого диапазона Рэлея R может быть выражено как:

Диапазон Рэлея R часто определяют, как z направленное расстояние между фокусной глубиной и глубиной, где ширина луча -  раз от ширины в фокусной глубины. Таким образом, R характеризует z-диапазон, в котором луч достаточно узкий, чтобы позволить высокое разрешение изображение, что ограничено геометрической и волновой оптикой. В этом контексте Lмакс может подразумевать характеристику диапазона z-изображения, что ограничено источником излучения 210, и разрешением сенсорной решетки 232. Принцип проекта системы часто подразумевают оптимальный, например, для Гауссовских лучей, должен заставить эти два z-диапазона выравниваться друг с другом. Например, в некоторых исполнениях Lмакс может быть выбран практически равным 1-6R:
раз от ширины в фокусной глубины. Таким образом, R характеризует z-диапазон, в котором луч достаточно узкий, чтобы позволить высокое разрешение изображение, что ограничено геометрической и волновой оптикой. В этом контексте Lмакс может подразумевать характеристику диапазона z-изображения, что ограничено источником излучения 210, и разрешением сенсорной решетки 232. Принцип проекта системы часто подразумевают оптимальный, например, для Гауссовских лучей, должен заставить эти два z-диапазона выравниваться друг с другом. Например, в некоторых исполнениях Lмакс может быть выбран практически равным 1-6R:

Тот же принцип проекта могут заявить при помощи широко используемого понятия “глубина фокуса”, который часто определяют как двойной диапазон Рэлея.
Как показано в примерах (1)-(4), диапазон z-изображения зависит от Lмакс и R, которые в свою очередь зависят от параметров проекта системы, включая λ0, δλ, Wкамера, W источник, f, d’, Nf, и d. Таким образом, для того чтобы отображать системы для операции по удалению катаракты, вышеупомянутые параметры проекта системы должны быть выбраны такими, что z-глубина, изображающая диапазон системы изображения СО-ОКТ 200, превышает 4 мм или 6 мм, например попадающий в диапазон 4-20 мм или 6-10 мм, таким образом, делая хирургическую систему для удаления катаракты 100 способной помогать в операциях по удалению катаракты высоким разрешением и достаточно быстрым изображением. Это требование проекта весьма зависимо и отличает катарактальные системы изображения от роговичных или сетчаточных систем изображения.
Фиг. 7 иллюстрирует вариант реализации, который может гарантировать не только большой диапазон z-глубины изображения, но и быстрое время изображения, позволяющее системе изображения СО-ОКТ 200 обеспечивать изображения обратной связи своевременно и, таким образом, действенно, включая использование при существенной скорости видео в реальном времени. Как указано выше, хирургическая система для удаления катаракты 100 с системой изображения СО-ОКТ 200 может иметь свою систему управления, включая процессор изображения ОКТ 201, и лазерный контроллер 130 работает по существу в режиме реального времени с опцией наладки или изменения хирургических шаблонов просмотра во время операции согласно полученной информации изображения обратной связи.
Как описано подробно ниже, варианты реализации Фиг. 7 также настраивают для особо быстрого сканирования луча изображения ОКТ 308/222, используя предвычисленные шаблоны сканирования. В некоторых вариантах реализации эти высокие скорости обновления изображения системы изображения СО-ОКТ 200 могут быть достигнуты включением заданной платы ввода-вывода 260.
Одна функция заданной платы ввода-вывода 260 должна обращаться к проблемам некоторых существующих систем изображения ОКТ, которые не имеют схемы и процессора, заданных для изображения. В этих системах процессор, который отвечает за изображение, могут заставить или подвести к мульти задаче и выполнять больше чем одну функцию чередующимся, параллельным или перекрывающим способом. Чтобы выполнять эти функции, процессор изображения может выполнить "перерыв", переключая от, например, задачи сканирования луча изображения 222/308 к другой задаче и обратно. Такие перерывы, хоть и короткие, могут причинить проблемы в то время, когда сканирование останавливают или замораживают перерывом, лазерный луч может остаться направленным в тоже положение. Это замораживание сканирования может разрушить чувство времени (x, y) сканирования, вводя ошибки и шум в координаты изображенных местоположений. Эта ошибка чувства времени в выходных данных сканирования может достигнуть задержек 50, 100 или больше микросекунд: явление, иногда называемое неустойчивой синхронизацией.
Кроме того, обычно несколько других устройств ввода/вывода связываются на той же шине системы, на которой процессор изображения проводит сканирование луча изображения, все зависит от доли циклического времени шины. Эта разделенная природа канала, к сожалению, позволяет ему поддерживать только медленные скорости передачи данных. К тому же, чтобы управлять этими конкурирующими требованиями, часть цикла шины системы обычно поглощается сигналами управления. Поэтому даже если система изображения ОКТ разработана, чтобы избежать замораживания сканирования, переключая процессор отображения на вывод данных сканирования, на сканирующий блок в режиме одной задачи через заданное звено, то процессор изображения не будет способен выполнить другие свои функции в течение этой стадии вывода, такие как вычисление следующего шаблона сканирования. Все эти ограничения значительно замедляют работу таких существующих систем изображения.
Исполнения системы изображения СО-ОКТ 200 могут преодолеть эти трудности, используя следующий эффективный проект. Сканирование луча изображения 222 может управляться процессором отображения 250 и заданной платой ввода-вывода 260. Процессор отображения 250 может вычислять данные сканирования, такие как шаблон целевого сканирования 302 и измененный шаблон сканирования 312. Эти данные сканирования могут включать, например, последовательность (x, y) координат, где луч изображения ОКТ 222 должен быть направлен в целевую область катаракты. Процессор изображения 250 может вычислять данные сканирования, так же как и выполнить другие свои функции, связанные с носителем данных, который хранит компьютерный код или набор инструкций, чтобы облегчить эти функции процессора изображения 250.
Заданная плата ввода-вывода 260 может включать местный или заданный контроллер памятью 262, также называемый как устройство прямого доступа к памяти (ПДП) 262. Устройство ПДП/контроллер памятью 262 может управлять передачей вычисленных данных сканирования, косвенно или непосредственно, от процессора изображения 250 к буферу данных 264. Буфер данных 264, присоединенный к местному контроллеру памятью 262, может хранить данные сканирования и может быть действующим к выводу данных сканирования к выводному цифровому аналоговому преобразователю (выводной ЦАК) 266 на высокой скорости. Выводной ЦАК 266 может быть присоединен к буферу данных 264, чтобы получить данные сканирования, конвертировать отобранные выводные данные сканирования в аналоговые, сигналы сканирования, и выводит сигналы сканирования на сканер луча ОКТ 268, например, в режиме пакета данных сканирования.
Луч изображения 222 может быть отсканирован сканером луча ОКТ 268 через отдельную заданную оптику изображения, или частично через направляющую оптику 120 хирургического луча. В этих исполнениях луч изображения 222 может быть присоединен к глазу через объектив 122 и соответствующий стыковочный узел или интерфейс пациента (ИП) 124. В других вариантах реализации луч изображения 222 могут направлять в глаз 1 по воздуху без стыковочного узла 124, состыкованного с глазом 1.
Вывод данных сканирования выводным ЦАК 266 может быть синхронизирован синхронизацией изображения 242 с работой камеры ОКТ 230 так, чтобы камера ОКТ 230 могла брать изображения ОКТ синхронно с действиями сканирования. Синхронно взятые изображения ОКТ могут быть выведены на процессор изображения ОКТ 201, который может выполнять любую из большого количества задач обработки изображения, описанные здесь. И наконец, произведенные и обработанные изображения могут быть показаны дисплеем изображения ОКТ 270. В некоторых вариантах реализации процессор изображения 250 и процессор изображения ОКТ 201 могут быть объединены частично или полностью.
Фиг. 8 иллюстрирует реализацию заданной платы ввода-вывода 260 более детально. Процессор отображения 250 может быть присоединен к шине 252, такой как PCI-шина 252. Система может также включать память процессора 254. Процессор изображения 250 может вычислять шаблоны сканирования и затем выводить вычисленные шаблоны сканирования через разделенную PCI-шину 252 к памяти процессора 254. После того как процессор отображения 250 произвел шаблоны сканирования, но до начала фактического действия сканирования, заданное устройство ПДП 262 может передать данные сканирования от памяти процессора 254 в буфер данных 264. Буфер данных 264 может быть памятью "обслуживания в порядке поступления" (ОВПП) 264. Буфер данных ОВПП 264 может хранить шаблон сканирования или данные сканирования и выводить хранимые данные сканирования на выводной ЦАК 266, когда подсказывает заданное устройство ПДП 262. Выводной ЦАК 266 может конвертировать данные сканирования в аналоговые сигналы сканирования и выводить их на сканер x galvo луча 268x и сканер y galvo луча 268y сканера луча ОКТ 268, который контролирует x и y galvo зеркалами, или систему переадресации элементов, чтобы просканировать луч изображения ОКТ 222/308 согласно шаблону целевого сканирования 302 и измененному шаблону сканирования 312, закодированному в данных сканирования. Некоторые исполнения могут иметь объединенный (x, y) galvo-контроллер 268xy, который управляет единственным galvo зеркалом, способным к вращению и вокруг x, и вокруг y осей. Выводной ЦАК 266 может также управлять синхронизацией изображения 242, чтобы синхронизировать взятие изображений ОКТ с действиями сканирования.
В некоторых исполнениях процессор изображения 250 может выводить данные сканирования на заданную плату ввода-вывода 260 через заданную шину памяти или через местную шину вместо разделенной PCI-шины 252. В других исполнениях может быть даже прямая связь между процессором изображения 250 и устройством ПДП 262.
Этот проект эффективен, по меньшей мере, по следующим причинам. (1) Данные сканирования или шаблоны сканирования, предвычисленные процессором изображения 250, таким образом, предполагают потребление малого количества времени для сканирование вычисленных данных в реальном времени. (2) Процессор изображения 250 не озадачен выводом данных сканирования в режиме реального времени, поскольку предвычисленные данные сканирования хранят в заданном буфере данных 264. Этот проект может уменьшить перерывы, замораживания и неустойчивые синхронизации ниже 50, 40 или даже 20 микросекунд, вызванные мультипрограммной работой процессора изображения 250. (3) Передача данных сканирования не будет прервана шиной 252, разделяемой другими устройствами, и при этом она не будет замедлена обычной медленной скоростью передачи разделенной PCI-шины 252. (4) Буфер данных 264 задан задаче сканирования так, что вывод данных сканирования может быть выполнен в быстром режиме передачи, таком как пакетный режим, далее увеличивая скорость сканирования.
Кроме того, с тех пор как заданная плата ввода-вывода 260 управляет выводом данных сканирования фактически автономно, процессор изображения 250 свободен для выполнения других функций параллельно с выводом данных сканирования, таком как создания измененного шаблона сканирования 312.
В некоторых исполнениях скорость вывода выводным ЦАК 266 может быть настолько быстра, что операционная скорость системы изображения CO-ОКТ 200 может быть ограничена временем введения камеры ОКТ 230, вместо скорости сканирующей электроники. В части этого исполнения выводной ЦАК 266 может выводить сигналы сканирования со скоростью в пределах одного из следующих диапазонов: 1 Гц - 1 МГц, 100 Гц - 1 МГц, или 1 кГц - 100 кГц.
Фиг. 9 иллюстрирует, что некоторые лазерные хирургические системы для удаления катаракты 100 могут включать другой тип системы изображения: систему изображения Охватывающего Источника-ОКТ (ОИ-ОКТ) 280. Система изображения ОИ-ОКТ 280 может включать стреловидную длину волны источника излучения 282, который выпускает когерентный луч изображения с более узким диапазоном частот Wисточник, чем источник излучения СО-ОКТ 210. Посредством способов модуляции, источник излучения ОИ-ОКТ 282 может изменять длину волны выпускаемого луча изображения 222, вовремя "охватывая" длину волны λ поперек диапазона частот Wисточник. Система изображения ОИ-ОКТ 280 может использовать систему направления луча 211, который является аналогом системы изображения СО-ОКТ 200. В частности, 1-й расщепитель луча 212 может снова создать комбинированный луч 226, который несет информацию изображения, связанную с различными длинами волны.
Как различие от систем изображения ОКТ на основе спектрометра система изображения ОИ-ОКТ 280 вовремя отделяет различные длины волны или спектральные компоненты, тогда как системы СО-ОКТ 200 отделяют их в пространстве. Различные компоненты длины волны, неся данные изображения, соответствующие различным z-глубинам, отделены во временной последовательности, поскольку длину волны λ охватывают источником излучения ОИ-ОКТ 282. Тем не менее, камера ОКТ 230 систем ОИ-ОКТ 280 также отличается.
В некоторых исполнениях она состоит из единственного датчика 284, который может обнаружить и устранить комбинированный луч 226 в очень коротких временных интервалах. В некоторых вариантах реализации датчик 284 может быть лавинным фотодиодом или фотоэлектронным умножителем. Датчик 284 может быть способен к передаче или демпингу обнаруженных сигналов, относящихся к различным длинам волны или спектральным компонентам, набору группировщиков данных 286. Некоторые варианты реализации системы изображения ОИ-ОКТ 280 аналогичны системам изображения ОС-ОКТ, потому что они оба производят изображения через спектральное разложение. Спектральные компоненты изображения ОИ-ОКТ могут быть собраны в изображении ОКТ подобно, как в системах ОС-ОКТ: Быстрый Преобразователь Фурье 288 может выполнить преобразование Фурье содержания группировщиков данных 286, чтобы помочь генератору изображения 234 производить изображение ОКТ. Узел БПФ 288 может аналогичным узду БПФ 233 в системе изображения СО-ОКТ 200.
Согласно вышеупомянутому описанию системы изображения ОИ-ОКТ 280 имеет особенности, подобные системам изображения ВО-ОКТ, так как в одной стадии, данные изображения охвачены последовательно, не параллельно. Тем не менее, в отличие от систем ВО-ОКТ различные данные z-глубины изображения охвачены различными спектральными компонентами комбинированного луча 226, требуя выполнения преобразования Фурье узлом БПФ 288. В этом смысле системы изображения ОИ-ОКТ 280 связаны с системами изображения СО-ОКТ 200, которые явно работают с различными спектральными компонентами. Системы ОИ-ОКТ близки к системам СО-ОКТ в еще одном смысле: они охватывают длину волны луча изображения охваченной длины волны источника излучения 282, не перемещая механические части, такие как зеркало опорного луча 216. И наконец, поскольку охват длины волны охваченной длины волны источника излучения 282 может быть выполнен со скоростью намного выше скорости сканирования системы ВО-ОКТ, поскольку никакие перемещающиеся части не затрагивают охватом, системы ОИ-ОКТ 280 могут изображать со скоростью намного быстрее, чем системы ВО-ОКТ, хотя и ниже скорости изображения систем СО-ОКТ. Поэтому исполнение системы изображения ОИ-ОКТ 280 также способно производить их изображения при скорости обновления в реальном времени с приемлемым разрешением, обеспечивая очень полезные функциональные возможности и действенную обратную связь для хирургические системы для удаления катаракты 100.
Фиг. 10 иллюстрирует способ офтальмологической операции 500, чтобы эксплуатировать хирургические системы для удаления катаракты 100. Способ 500 может включать: создание электронного изображения шаблона целевого сканирования 302 для хрусталика 5 глаза 1 лазерным контроллером 130 (510); создание и сканирования хирургического лазерного луча 304 в хрусталике 5 глаза согласно шаблону целевого сканирования 302 лазерной хирургической системой для удаления катаракты 100, создание реза 306 в хрусталике (520); создание изображения части глаза и реза 306 с системой изображения Спектральной Области Оптической Когерентной Томографии 200 после начала сканирования лазерного луча (530); осуществление визуального анализа, произведенного изображения процессором изображения ОКТ (535); создание электронного изображения измененного шаблона сканирования 312 лазерным контроллером 130 относительно осуществленного визуального анализа (540); и создание и сканирование хирургического лазерного луча 304 в хрусталике 5 глаза согласно измененному шаблону сканирования 312 лазерной хирургической системой для удаления катаракты 100, создание измененного реза 314 (550).
В некоторых исполнениях создание электронного изображения измененного шаблона сканирования 540 может включать получение измененных вводных данных от оператора системы в ответ на произведенное изображение части глаза.
В других исполнениях создание электронного изображения измененного шаблона сканирования 540 может включать анализ произведенного изображения процессором изображения ОКТ 201; определение отклонения реза 306 относительно шаблона целевого сканирования 302; и создание сигнала управления процессором изображения ОКТ 201 для лазерного контроллера 130, чтобы производить измененный шаблон сканирования 312.
Фиг. 11 иллюстрирует смежный способ операции по удалению катаракты 600. Метод 600 может включать управление сканированием хирургического лазерного луча 304 в хрусталике 5 глаза 1 лазерным контроллером 130 (610); создание изображений части хрусталика 5 со скоростью, по меньшей мере, 5 кадров в секунду системой изображения Спектральной Области Оптической Когерентной Томографии 200 (620); осуществление анализа произведенных изображений процессором изображения ОКТ (625); и изменение сканирования хирургического лазерного луча 304 лазерным контроллером 130 в ответ на анализ, выполненный процессором изображения ОКТ (630).
В то время как это описание содержит много специфических особенностей, они не должны быть рассмотрены как ограничения на объемы изобретения или того, что может требоваться, а скорее, как описания особенностей, определенных к специфическим вариантам реализации. Некоторые особенности, которые описаны в этом описании, в контексте отдельных вариантов реализации могут также быть осуществлены в комбинации в единственном варианте реализации. Наоборот, различные особенности, которые описаны в контексте единственного варианта реализации, могут также быть осуществлены в многочисленных вариантах реализации отдельно или в любой подходящей субкомбинации. Более того, хотя особенности могут описывать выше, как действие в некоторых комбинациях и даже первоначально требовать это, одна или более особенностей от требуемой комбинации могут в некоторых случаях быть отделены от комбинации и требуемая комбинация может быть направлена к субкомбинации или к разнообразию субкомбинации.
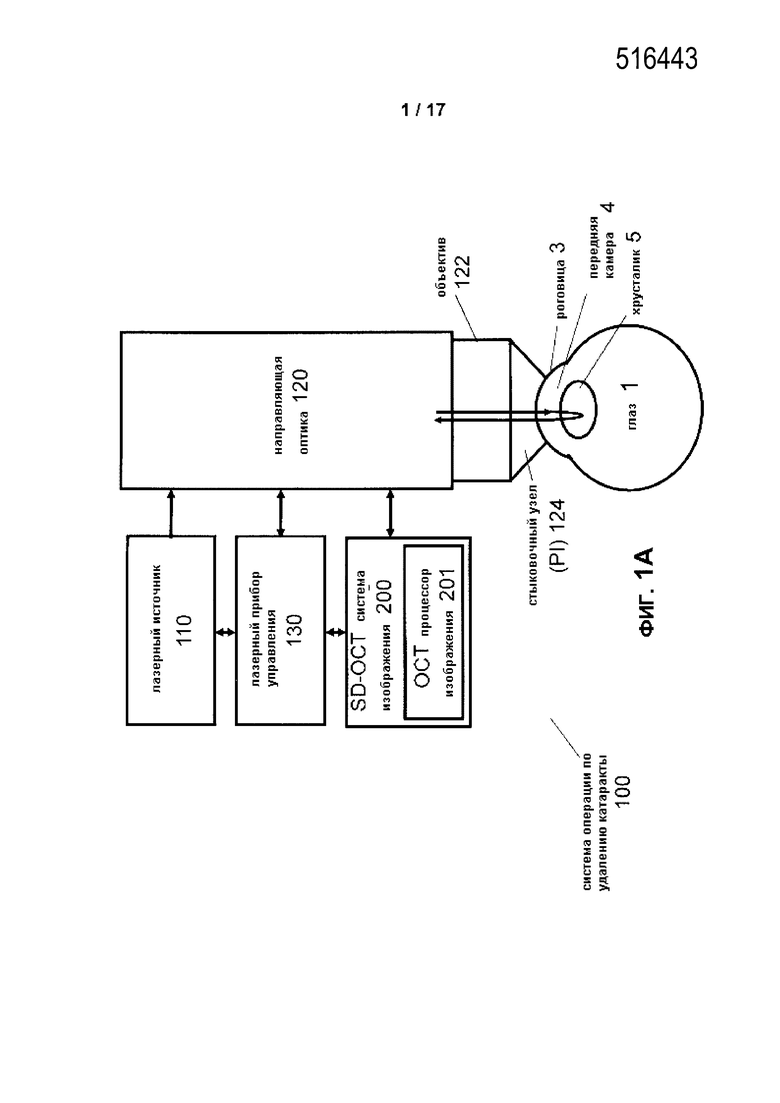
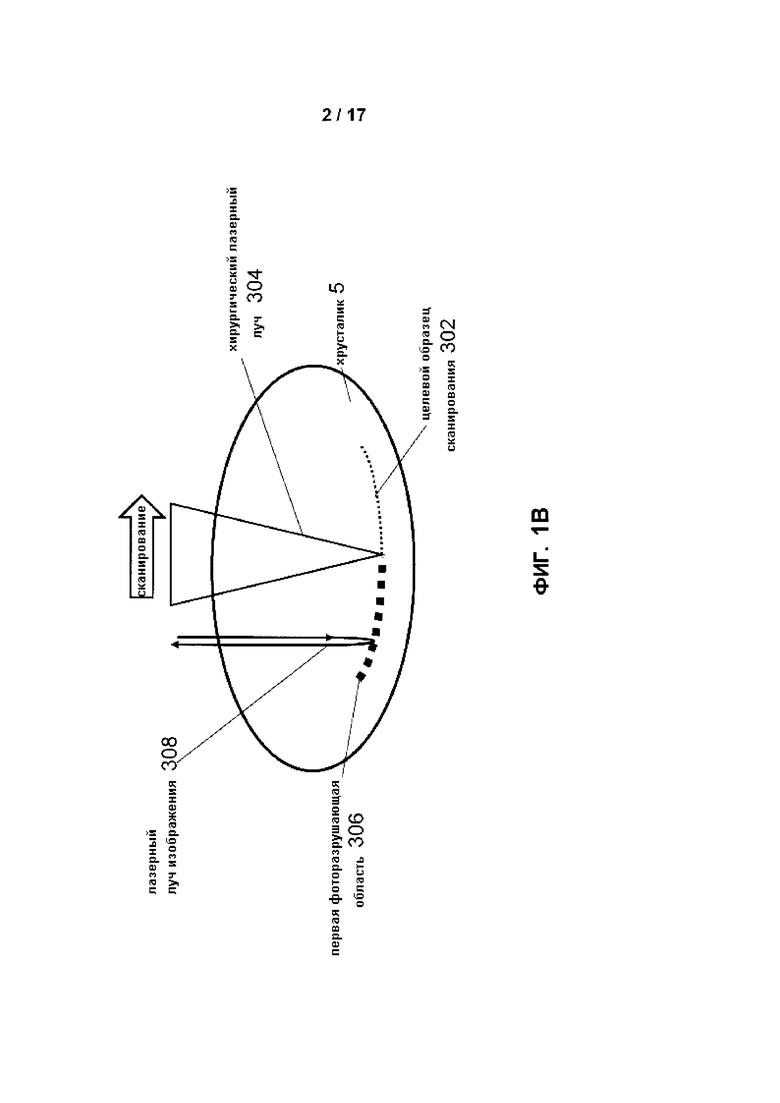
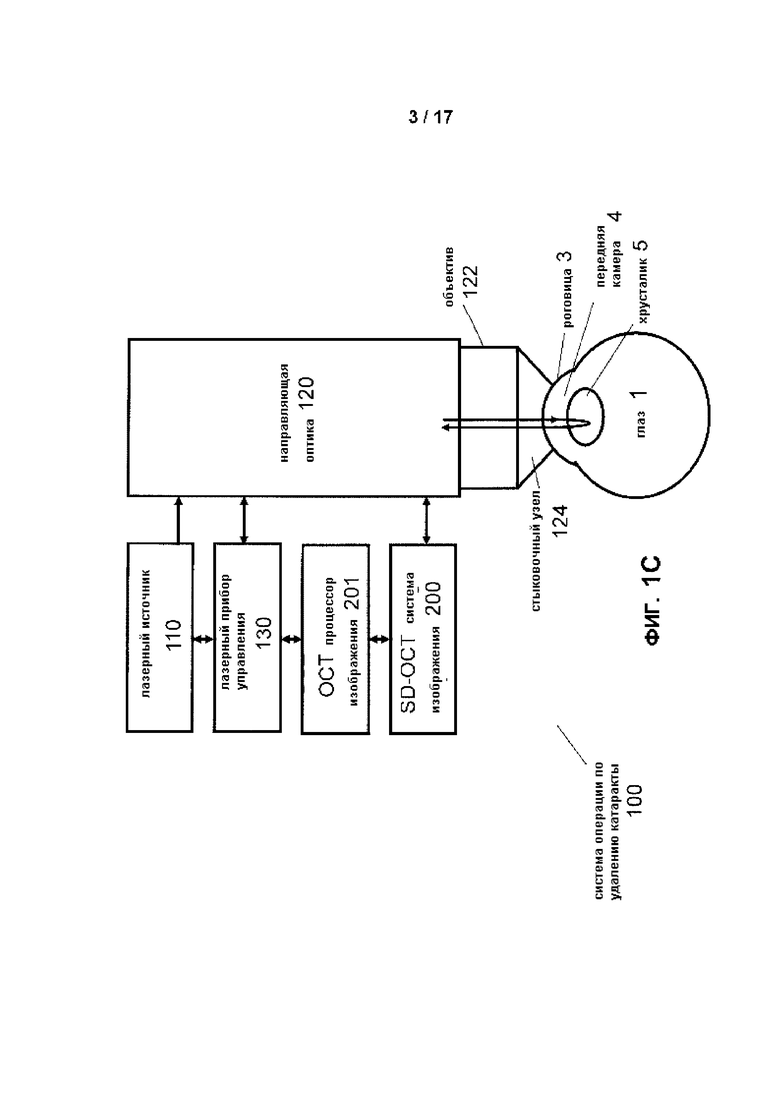
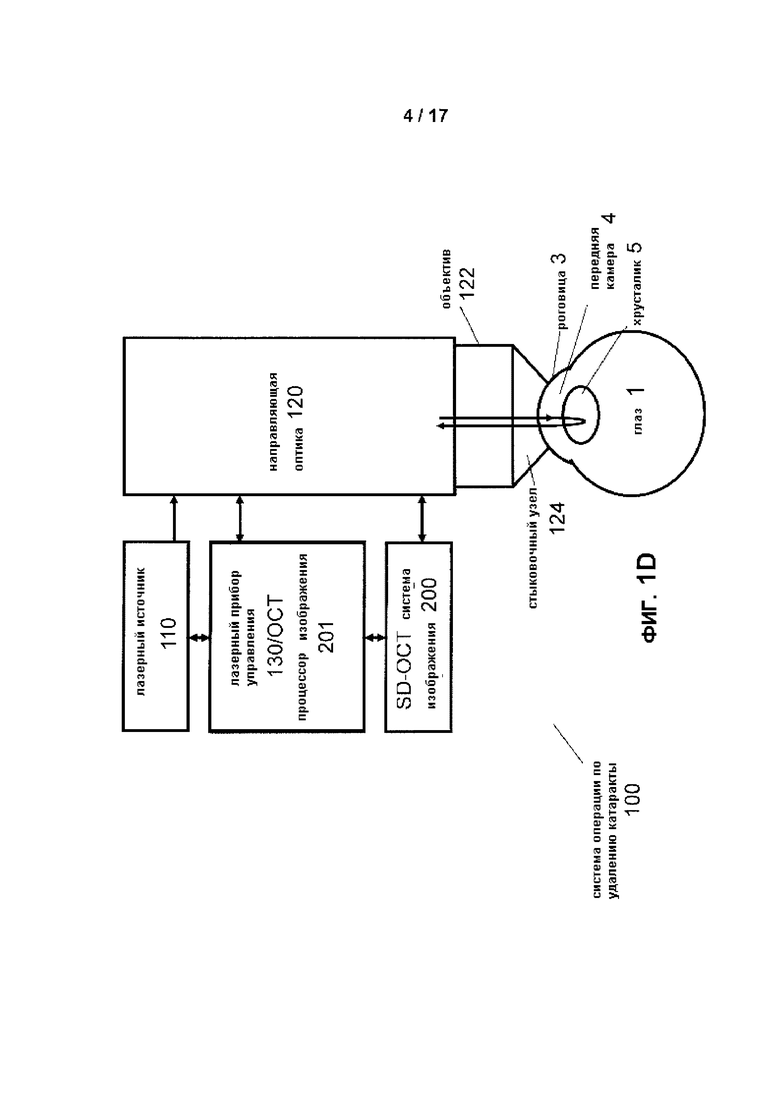
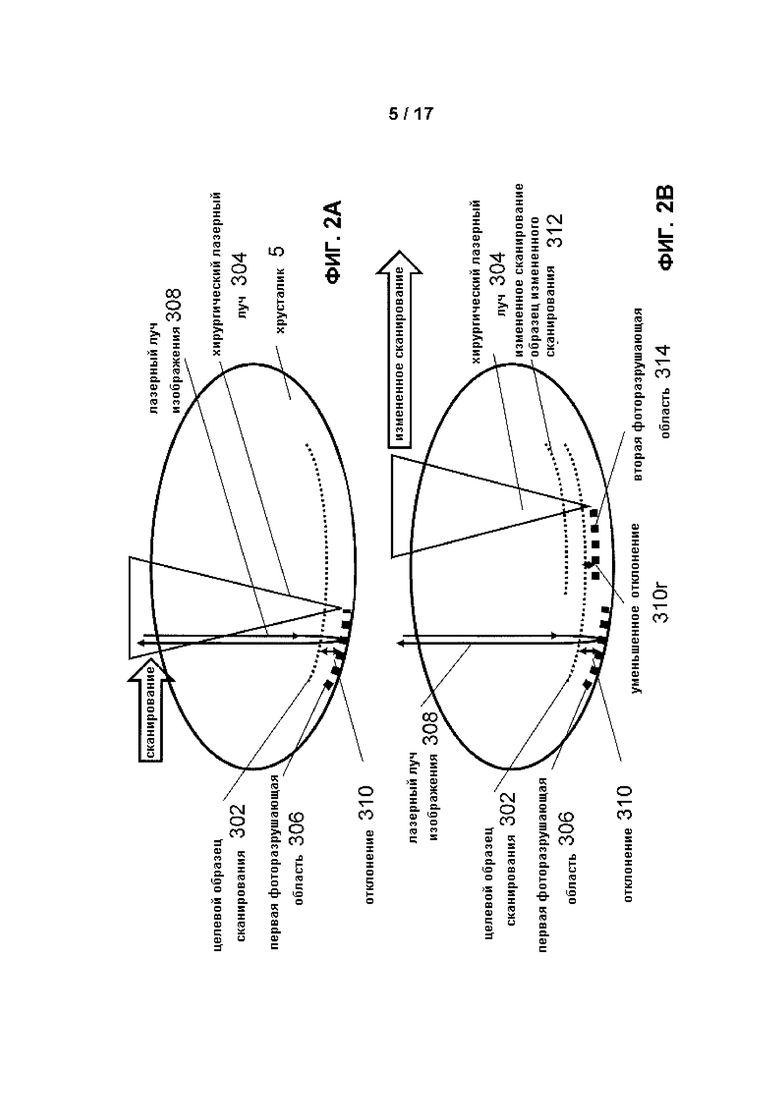
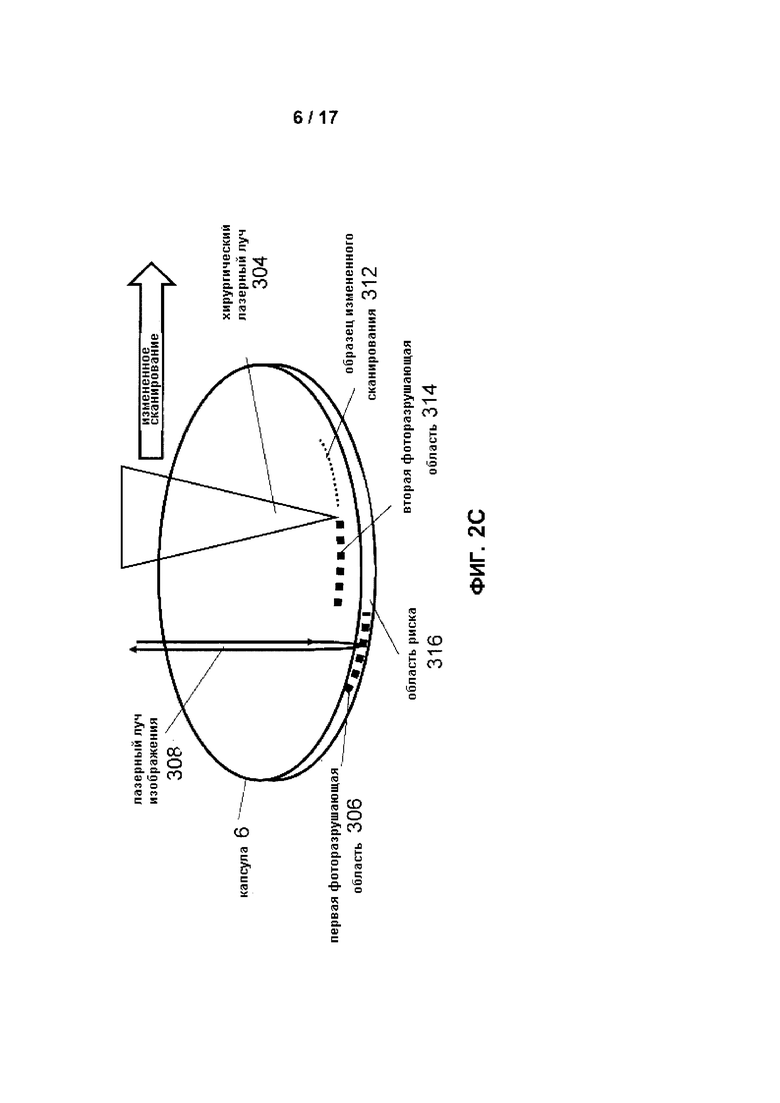
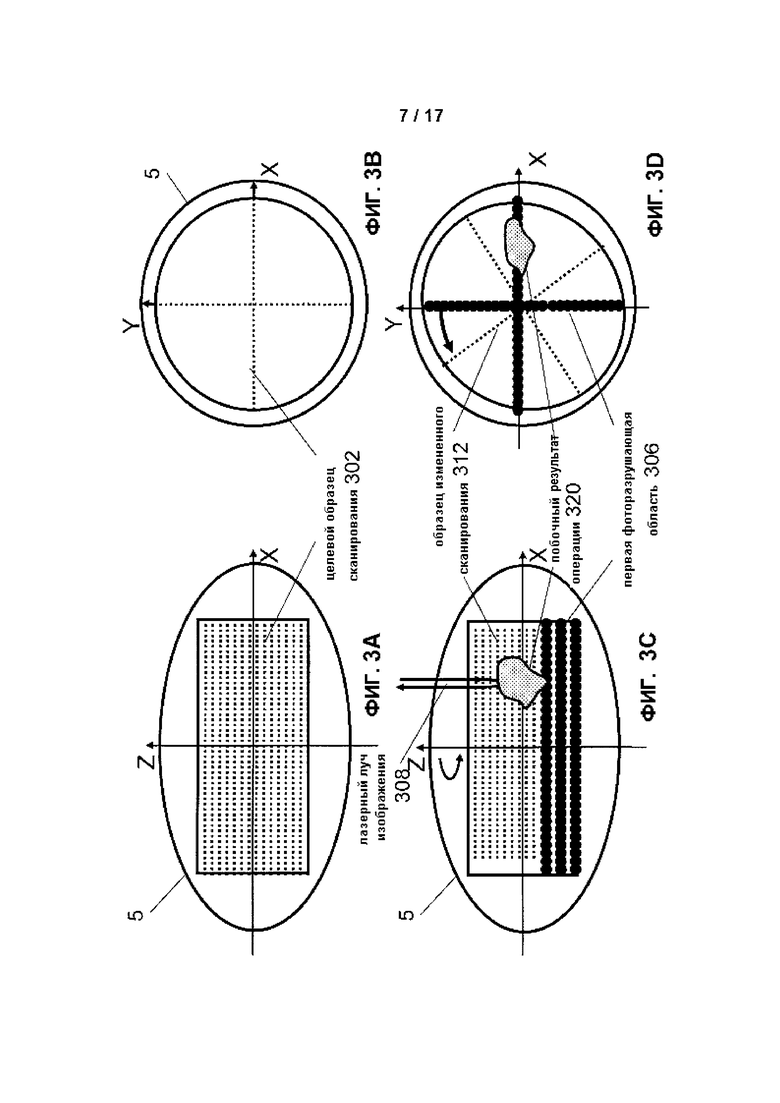
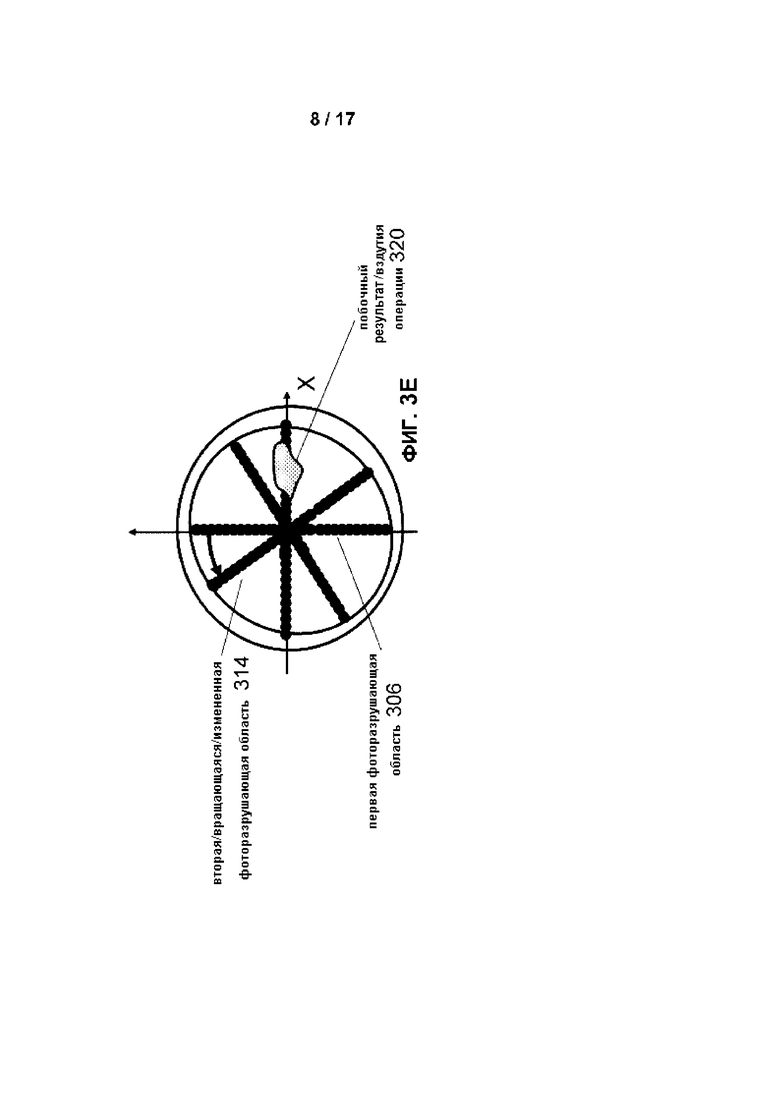
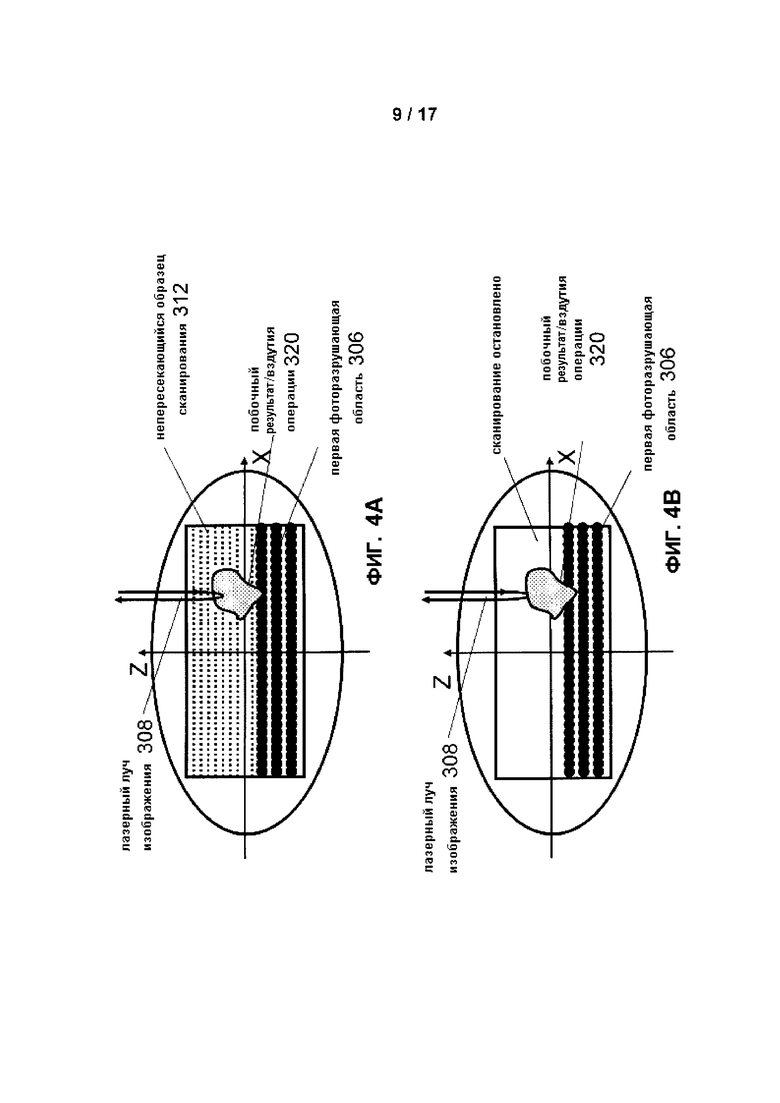
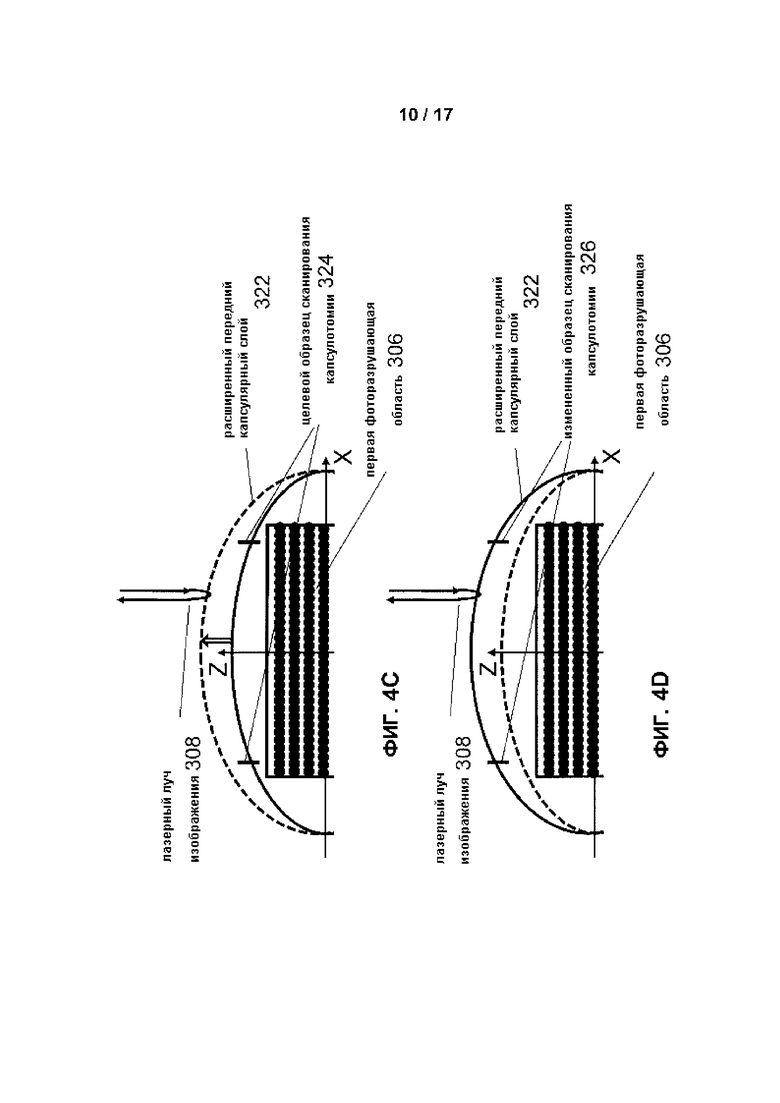
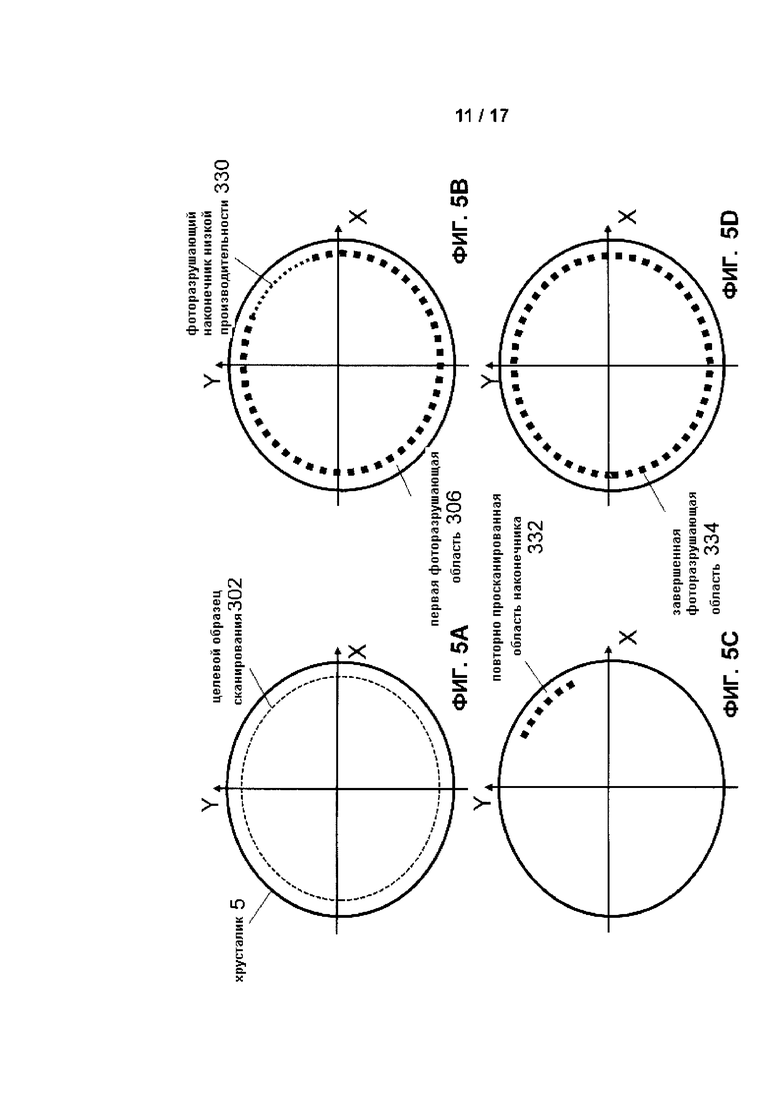
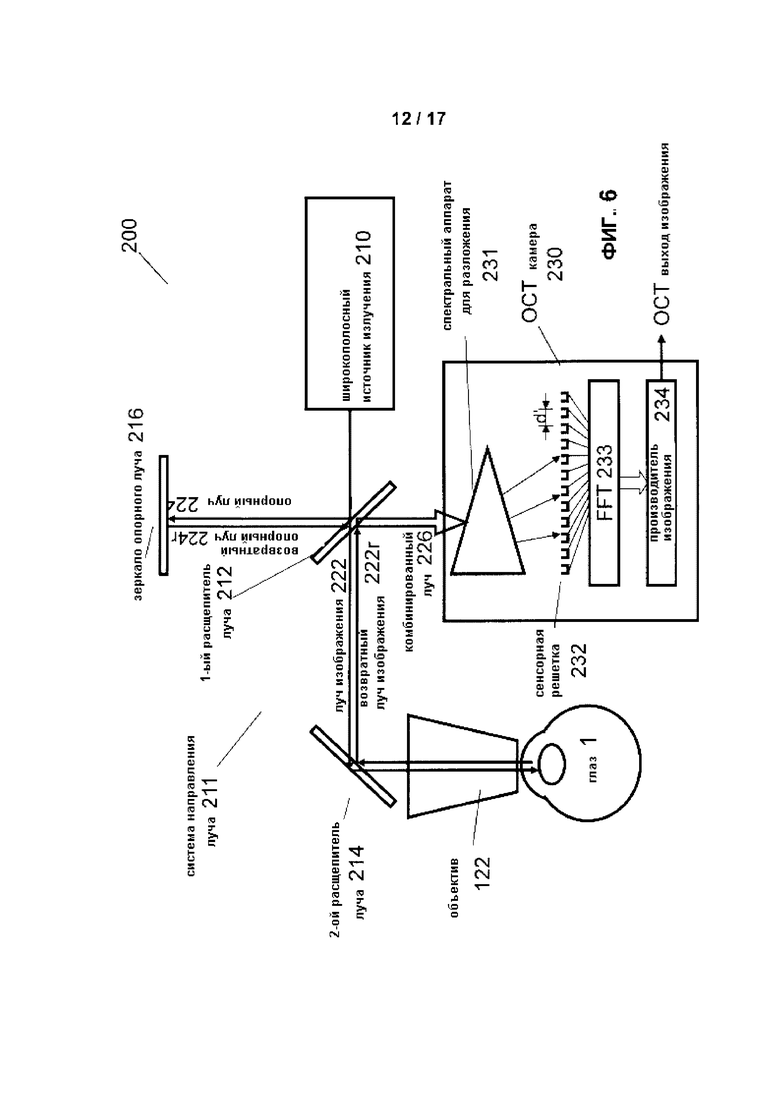
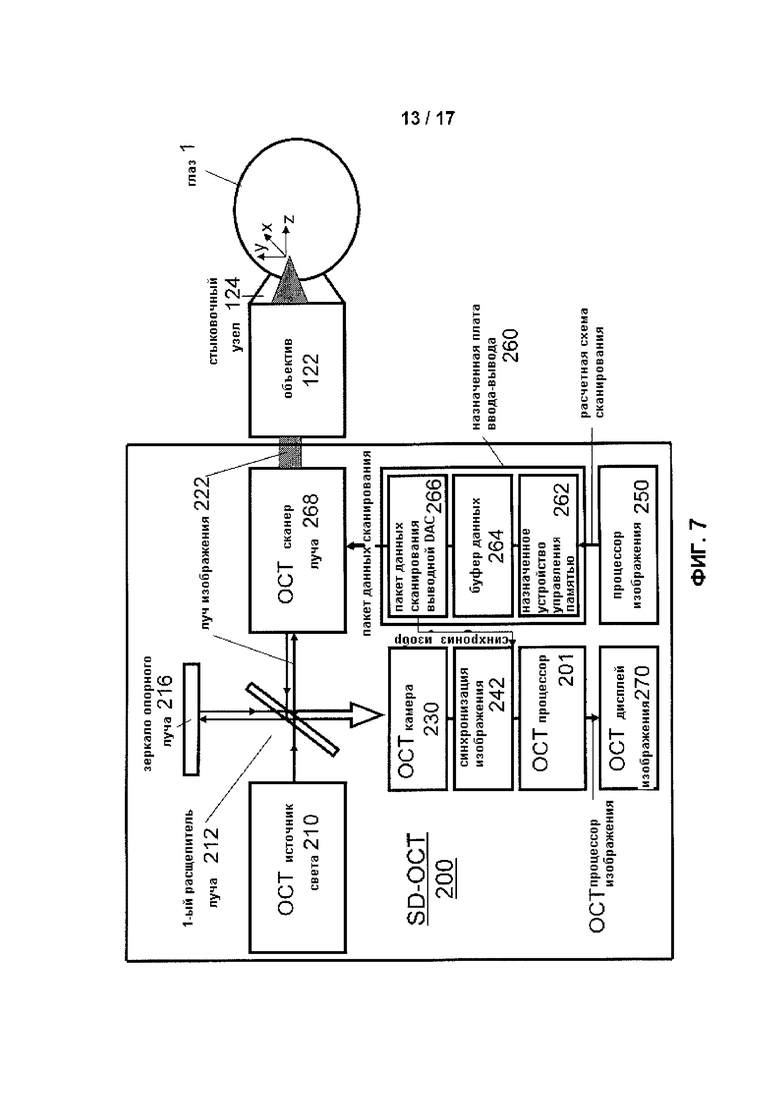
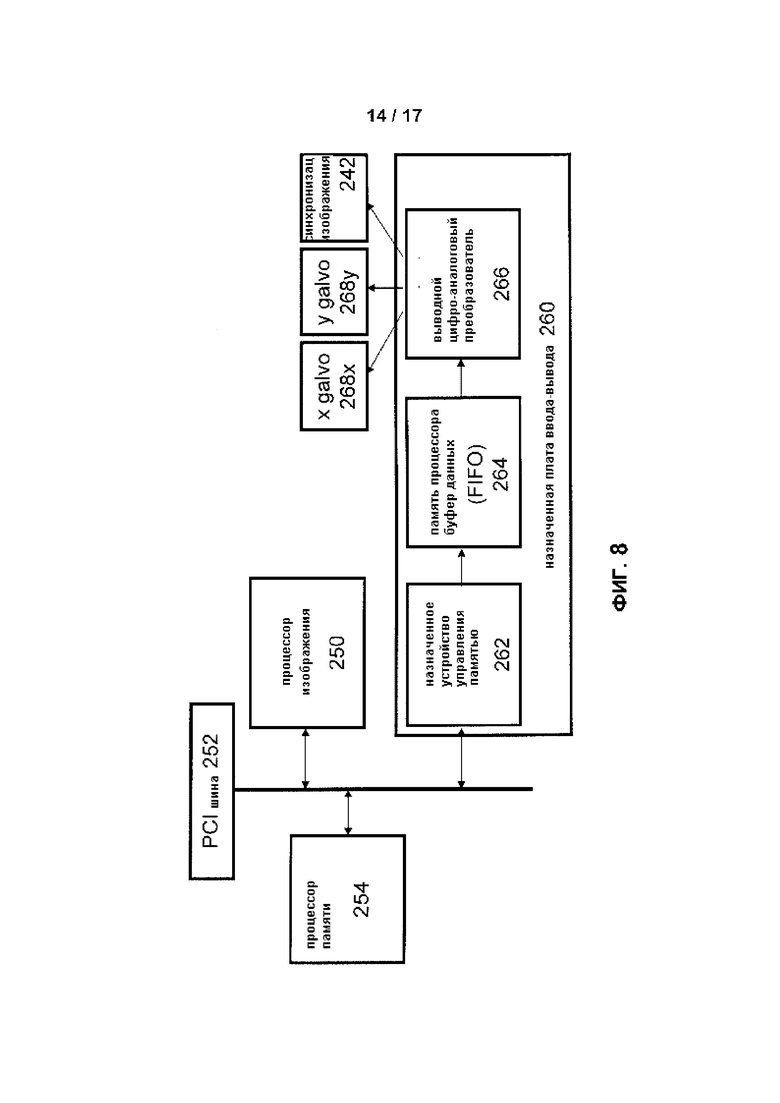
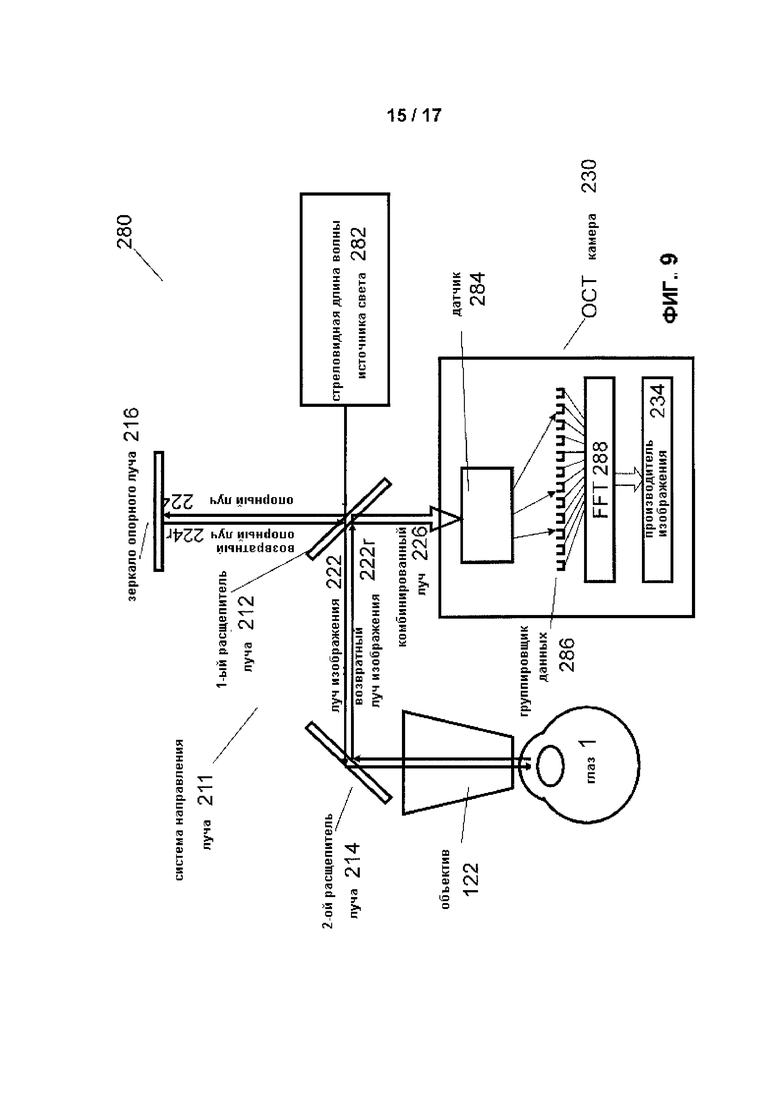
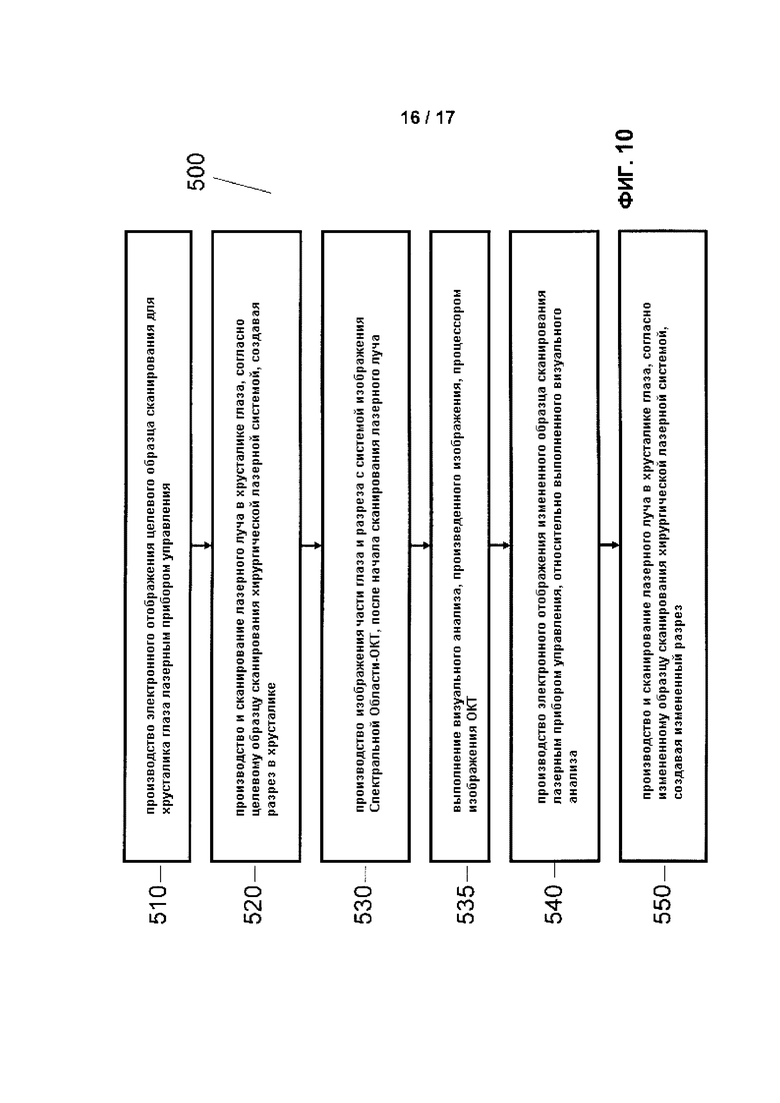
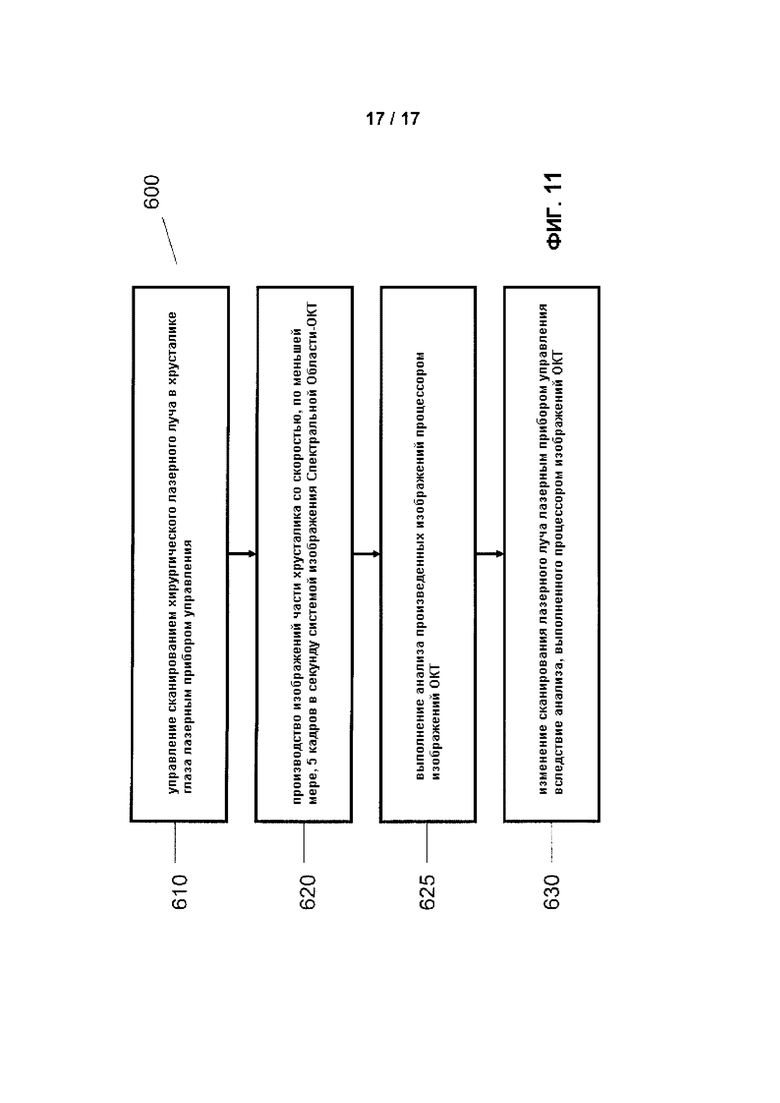
Изобретение относится к медицине. Хирургическая система для удаления катаракты содержит лазерный источник, выполненный с возможностью создания первой группы лазерных импульсов; направляющую оптику, присоединенную к лазерному источнику, выполненную с возможностью направлять первую группу лазерных импульсов в целевую область катаракты глаза; лазерный контроллер; систему изображения Спектральной Области Оптической Когерентной Томографии (СО-ОКТ), выполненную с возможностью создания изображения, содержащего части первой фоторазрушаемой области с разрешением изображения в диапазоне от 0,5 до 5 миллионов точек изображения на каждое изображение и со скоростью передачи в диапазоне от 20 до 200 кадров в секунду; и процессор изображения ОКТ, выполненный с возможностью выполнения анализа изображения. Лазерный контроллер выполнен с возможностью создания электронного изображения целевого шаблона сканирования и электронного изображения измененного шаблона сканирования в соответствии с анализом изображения, выполненным процессором изображения ОКТ; и управления направляющей оптикой для сканирования первой группой лазерных импульсов в соответствии с частью шаблона сканирования для создания первой фоторазрушаемой области в целевой области катаракты и управления направляющей оптикой для сканирования второй группой лазерных импульсов в соответствии с измененным шаблоном сканирования для создания второй фоторазрушаемой области. Применение данного изобретения позволит расширить арсенал технических средств. 19 з.п. ф-лы, 11 ил.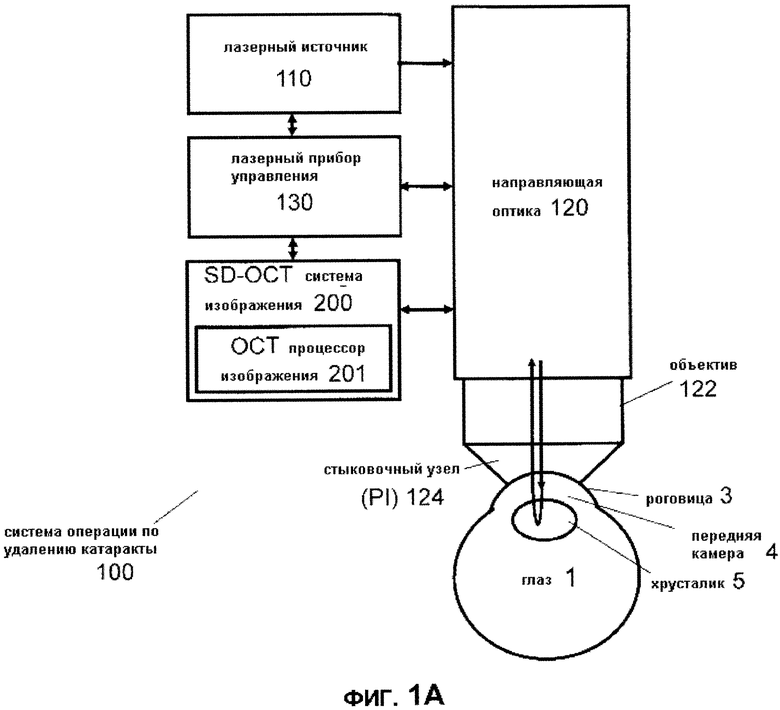
1. Хирургическая система для удаления катаракты, содержащая
лазерный источник, выполненный с возможностью создания первой группы лазерных импульсов;
направляющую оптику, присоединенную к лазерному источнику, выполненную с возможностью направлять первую группу лазерных импульсов в целевую область катаракты глаза;
лазерный контроллер, выполненный с возможностью
создавать электронное изображение целевого шаблона сканирования, и
управлять направляющей оптикой для сканирования первой группой лазерных импульсов в соответствии с частью шаблона сканирования для создания первой фоторазрушаемой области в целевой области катаракты;
систему изображения Спектральной Области Оптической Когерентной Томографии (СО-ОКТ), выполненную с возможностью создания изображения, содержащего части первой фоторазрушаемой области с разрешением изображения в диапазоне от 0,5 до 5 миллионов точек изображения на каждое изображение и со скоростью передачи в диапазоне от 20 до 200 кадров в секунду; и
процессор изображения ОКТ, выполненный с возможностью выполнения анализа изображения, при том что
лазерный контроллер выполнен с возможностью
создания электронного изображения измененного шаблона сканирования в соответствии с анализом изображения, выполненным процессором изображения ОКТ, и
управления направляющей оптикой для сканирования второй группой лазерных импульсов в соответствии с измененным шаблоном сканирования для создания второй фоторазрушаемой области.
2. Хирургическая система для удаления катаракты по п. 1, в которой
целевая область катаракты содержит передний капсулярный слой; а
целевой шаблон сканирования содержит группу целевых точек на цилиндре, формирующих по меньшей мере одну циклическую капсулотомию, переднюю капсулотомию и нелинейную капсулотомию.
3. Хирургическая система для удаления катаракты по п. 1, в которой
целевая область катаракты содержит часть хрусталика; и
целевой шаблон сканирования содержит группу целевых точек по меньшей мере на одной из радиальных плоскостей дробления, цилиндрах, спиральном шаблоне и рисунке сети, вызывающих по меньшей мере одно из дробления, фоторазрушения и лизиса хрусталика.
4. Хирургическая система для удаления катаракты по п. 1, в которой
система изображения СО-ОКТ выполнена с возможностью иметь диапазон z-изображений более 4 мм.
5. Хирургическая система для удаления катаракты по п. 1, в которой
система изображения СО-ОКТ выполнена с возможностью иметь диапазон z-изображений более 6 мм.
6. Хирургическая система для удаления катаракты по п. 1, в которой
система изображения СО-ОКТ выполнена с возможностью создавать изображение за время визуализации менее 0,1 сек.
7. Хирургическая система для удаления катаракты по п. 1, в которой
система изображения СО-ОКТ выполнена с возможностью выполнять повторяемые изображения с (х, у) разрешением в диапазоне от 500 до 2000 А-сканирований/В-сканирований.
8. Хирургическая система для удаления катаракты по п. 1, в которой
процессор изображения СО-ОКТ выполнен с возможностью предоставления обратной связи для оператора системы, основанной на выполненном анализе изображения.
9. Хирургическая система для удаления катаракты по п. 8, в которой
процессор изображения ОКТ выполнен с возможностью
определять рекомендуемый ввод изменений, основанных на выполненном анализе изображения, и
отображать рекомендуемый ввод изменений оператору системы.
10. Хирургическая система для удаления катаракты по п. 8, в которой
процессор изображения ОКТ выполнен с возможностью
определять разницу между опорным изображением, взятым до создания первой группы лазерных импульсов, и изображением, взятым после того, как первая группа лазерных импульсов создаст фоторазрушаемую область; и
отображать выявленные различия.
11. Хирургическая система для удаления катаракты по п. 1, в которой
процессор изображения ОКТ выполнен с возможностью генерировать управляющий сигнал, основанный на выполнении анализа изображения, побуждая лазерный контроллер формировать электронное изображение измененного шаблона сканирования.
12. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ выполнен с возможностью определять отклонение по меньшей мере одного из местоположения, ориентации или формы первой фоторазрушаемой области, относительно целевого шаблона сканирования; и
лазерный контроллер выполнен с возможностью формировать электронное изображение измененного шаблона сканирования, сокращая выявленное отклонение.
13. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ выполнен с возможностью определять, достигает ли первая фоторазрушаемая область области риска; а
лазерный контроллер выполнен с возможностью формировать электронное изображение измененного шаблона сканирования для сканирования группой лазерных импульсов вне области риска.
14. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ и лазерный контроллер являются объединенными.
15. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ выполнен с возможностью распознавать побочные результаты операции; и
лазерный контроллер выполнен с возможностью формировать электронное изображение измененного шаблона сканирования таким образом, чтобы измененный шаблон сканирования не перекрывался побочным результатом операции.
16. Хирургическая система для удаления катаракты по п. 15, в которой
целевой шаблон сканирования является шаблоном дробления;
процессор изображения ОКТ выполнен с возможностью распознать газовое вздутие как побочный результат операции; а
лазерный контроллер выполнен с возможностью создавать электронное изображение вращаемого шаблона дробления, при том что измененный шаблон сканирования, такой как вращаемый шаблон дробления, не перекрывается газовым вздутием.
17. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ выполнен с возможностью идентифицировать часть фоторазрушаемой области, при том что фоторазрушаемая область была ограничена; и
лазерный контроллер выполнен с возможностью создания электронного изображения измененного шаблона сканирования, сканируя идентифицированную часть повторно.
18. Хирургическая система для удаления катаракты по п. 11, в которой
процессор изображения ОКТ выполнен с возможностью
анализировать часть изображения, которая отличается от первой фоторазрушаемой области, и
формировать обратную связь, основанную на этом анализе.
19. Хирургическая система для удаления катаракты по п. 1, в которой
система изображения СО-ОКТ содержит систему изображения ОКТ на основе спектрометра, содержащую:
широкополосный источник излучения, выполненный с возможностью создания широкополосного луча;
систему направления луча для:
разделения широкополосного луча на луч изображения и опорный луч,
направлять луч изображения в глаз и направлять возвратный луч изображения из глаза,
направлять опорный луч на зеркало опорного луча и направлять возвратный опорный луч из зеркала опорного луча, и
объединять возвратный луч изображения и возвратный опорный луч в комбинированный луч; и
камеру ОКТ, выполненную с возможностью получать комбинированный луч, содержащую:
спектральный разложитель для разложения комбинированного луча на компоненты спектра;
решетку датчиков для выявления компонентов спектра;
систему Быстрого Преобразования Фурье для выполнения преобразования Фурье из выявленных компонентов спектра; и
генератор изображения для создания изображения из прошедших преобразование Фурье компонентов спектра.
20. Хирургическая система для удаления катаракты по п. 19, в которой система изображения СО-ОКТ содержит:
выделенную плату ввода-вывода, выполненную с возможностью подавать управляющие сигналы целевого шаблона сканирования, при этом
выделенная плата ввода-вывода содержит
выделенный контроллер памяти
буфер данных; и
выводной Цифровой-Аналоговый Преобразователь; а
получаемое системой изображения СО-ОКТ изображение синхронизировано с выводом управляющих сигналов целевого шаблона сканирования выводным Цифровым-Аналоговым Преобразователем.
| US 20110196350 A1, 11.08.2011 | |||
| WO 2010075571 A2, 01.07.2010 | |||
| US 20090177189 A1, 09.07.2009 | |||
| US 20070291277 A1, 20.12.2007 | |||
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ ГЛУБИНЫ ФОКУСА | 2005 |
|
RU2436135C2 |

