ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системам и методам для применения в хирургии, в том числе в офтальмологической хирургии. В частности, настоящее изобретение относится к системам и способам высокоточной стыковки офтальмологических хирургических систем с хирургическим глазом.
УРОВЕНЬ ТЕХНИКИ
На протяжении нескольких лет разработано множество разнообразных передовых хирургических лазерных систем для офтальмологической хирургии на участках роговицы, хрусталика, сетчатки и других структур глаза. Некоторые из упомянутых хирургических систем повышают точность хирургической процедуры путем создания точно управляемого соединения между офтальмологическим хирургическим устройством и офтальмологическим целевым объектом, обычно областью или структурой глаза. В некоторых случаях упомянутое соединение устанавливают опусканием стыковочного модуля или блока на глаз. Некоторые системы используют также дополнительный этап фиксации, например, применение разрежения для усиления соединения. В типичных хирургических лазерных системах, точность и управляемость офтальмологической хирургии в значительной степени зависит от точности упомянутых этапов стыковки и фиксации, и, следовательно, повышение точности процедуры стыковки может повысить точность офтальмологической хирургической процедуры в целом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем описании приведены примеры и варианты осуществления систем и методов для управления офтальмологической хирургической системой с целью создания точно управляемого соединения с офтальмологическим целевым объектом, например человеческим глазом.
Например, способ стыковки офтальмологической системы может содержать этапы совмещения стыковочного блока офтальмологической системы и глаза; формирования изображения внутренней структуры глаза системой формирования изображений; уточнения совмещения стыковочного блока с внутренней структурой глаза в зависимости от сформированного изображения и стыковки стыковочного блока с глазом.
Этап совмещения стыковочного блока может содержать использование первой системы формирования изображений для совмещения целевого паттерна офтальмологической системы с характерным элементом глаза.
Первая система формирования изображений может быть какой-то одной из микроскопа или видеомикроскопа; целевой паттерн офтальмологической системы может содержать, по меньшей мере, что-то одно из центра контактной линзы, центра стыковочного блока, стыковочного кольца или стыковочного перекрестья; и характерный элемент глаза может быть центром области радужной оболочки, зрачка, роговицы, лимба или хрусталика; или кольцевым образованием, связанным с областью радужной оболочки, зрачка, роговицы, лимба или хрусталика.
Этап формирования изображения может содержать формирование изображения второй системой формирования изображений, при этом вторая система формирования изображений является какой-то одной из системы формирования изображений методом оптической когерентной томографии и системы формирования изображений, выполненной с возможностью формирования изображений внутренней структуры глаза.
Этап уточнения совмещения может содержать выделение позиционной информации, касающейся внутренней структуры глаза, из сформированного изображения; и регулировку положения, по меньшей мере, чего-то одного из глаза или стыковочного блока в зависимости от выделенной позиционной информации.
Этап уточнения совмещения может содержать выделение ориентационной информации, касающейся внутренней структуры глаза, из сформированного изображения; и регулировку ориентации, по меньшей мере, чего-то одного из глаза или стыковочного блока в зависимости от выделенной ориентационной информации.
Этап формирования изображения может содержать вычисление в процессоре данных сканирования, соответствующих паттерну сканирования; сохранение данных сканирования в буфере данных; передачу данных сканирования из буфера данных в модуль вывода; вывод сигналов сканирования из модуля вывода в по меньшей мере один сканер на основании данных сканирования; и сканирование визуализирующим пучком посредством по меньшей мере одного сканера в соответствии с сигналами сканирования.
Этап вычисления данных сканирования может содержать реализацию паттерна сканирования, который содержит, по меньшей мере, какой-то один из линейного паттерна, кольцевого паттерна, овального паттерна, замкнутого паттерна, дугового паттерна, растрового паттерна, двухкоординатного (x-y) паттерна, перекрестного паттерна, звездообразного паттерна, спирального паттерна и паттерна с удаленными точками.
Этап вычисления данных сканирования может содержать вставку синхронизирующих сигналов в данные сканирования посредством процессора.
Этап вычисления данных сканирования может содержать вычисление данных приведения в расчетную точку, соответствующих паттерну приведения в расчетную точку, соединяющему начальную точку паттерна сканирования с предварительно установленной точкой.
Этап сохранения данных сканирования может содержать сохранение данных сканирования в памяти процессора и передачи сохраненных данных сканирования из памяти процессора в буфер данных, частично, под управлением специализированного контроллера памяти.
Специализированный контроллер памяти может содержать механизм прямого доступа к памяти; и буфер данных может содержать память обратного магазинного типа.
Этап передачи данных сканирования может содержать вывод данных сканирования буфером данных в модуль вывода в режиме высокоскоростной передачи данных.
Этап передачи данных сканирования может содержать вывод данных сканирования из буфера данных, без передачи данных сканирования посредством, по меньшей мере, чего-то одного из шины, соединяющей специализированный контроллер памяти и процессор, памяти процессора или процессора.
Этап передачи данных сканирования может содержать вывод данных сканирования параллельно с выполнением процессором, по меньшей мере, чего-то одного из обработки изображения, вычисления данных сканирования, соответствующих паттерну сканирования, или выполнения функции управления.
Этап передачи данных сканирования может содержать прием данных сканирования модулем вывода, без прерывания другим системным агентом, с выдерживанием, тем самым, временного дрожания данных сканирования менее 40 микросекунд.
Этап вывода сигналов сканирования может содержать преобразование данных сканирование в аналоговые сигналы сканирования посредством модуля вывода, при этом, модуль вывода содержит цифроаналоговый преобразователь.
Этап сканирования визуализирующим пучком может содержать прием выведенных сигналов сканирования посредством контроллера сканирования и синхронизатора формирования изображений, при этом, сигналы сканирования содержат синхронизирующие сигналы; повторную регулировку по меньшей мере одного сканера посредством контроллера сканирования в соответствии с сигналами сканирования, чтобы сканировать визуализирующим пучком; и повторную синхронизацию камеры для формирования изображений посредством синхронизатора формирования изображений, в соответствии с синхронизирующими сигналами.
Контроллер сканирования может содержать по меньшей мере один контроллер с гальванометрическим приводом (в дальнейшем гальванометрический); и синхронизатор формирования изображений может содержать по меньшей мере один контроллер камеры для формирования офтальмологических когерентных изображений.
В некоторых вариантах осуществления ограничивающим фактором быстродействия системы формирования изображений может быть время интегрирования устройства записи изображения.
Этап вывода сигналов сканирования может содержать вывод сигналов сканирования со скоростью в пределах одного из следующих диапазонов: 1 Гц-1 МГц, 100 Гц-1 МГц или 1 кГц-100 кГц.
Этап вывода сигналов сканирования может содержать регулировку выходной скорости вывода сигналов сканирования.
Этап уточнения совмещения может содержать обеспечение речевой команды для пациента на перемещение им глаза, перемещение головы пациента, перемещение хирургического стола, на котором покоится пациент, перемещение глаза пациента, перемещение стыковочного блока посредством перемещения гентри или шарнирной консоли и использование захватного устройства для перемещения глаза на основании изображения внутренней структуры глаза.
Этап уточнения совмещения может содержать регулировку, по меньшей мере, чего-то одного из фиксирующего пучка или направляющего света для уточнения совмещения глаза и стыковочного блока; и выдачи указания пациенту сопровождать глазом фиксирующий пучок или направляющий свет.
Этап уточнения совмещения может содержать начало этапа уточнения совмещения до того, как стыковочный блок придет в контакт с глазом, после того как стыковочный блок придет в контакт с глазом, но перед подачей частичного вакуума в стыковочный блок или после подачи частичного вакуума.
Этап стыковки может содержать измерение расстояния между реперной точкой стыковочного блока и внешним слоем глаза и опускание стыковочного блока в соответствии с измеренным расстоянием.
В некоторых вариантах осуществления реперная точка может быть регулируемой.
Этап стыковки может содержать приведение стыковочного блока в физический контакт с глазом и подачу разрежения через участок стыковочного блока после того, как стыковочный блок приходит в физический контакт с глазом.
В некоторых вариантах осуществления контроллер формирования изображений для офтальмологической системы может содержать процессор, который вычисляет данные сканирования для паттерна сканирования; контроллер локальной памяти, который частично управляет передачей вычисленных данных сканирования из процессора в буфер данных, при этом буфер данных выполнен с возможностью сохранения данных сканирования и вывода данных сканирования; и выходной цифроаналоговый преобразователь, связанный с буфером данных, который преобразует выбранные данные сканирования в аналоговые сигналы сканировании и выводит сигналы сканирования.
Контроллер локальной памяти может содержать механизм прямого доступа к памяти.
Буфер данных может содержать память обратного магазинного типа, которая выводит сохраненные данные сканирования в режиме высокоскоростной передачи данных.
Контроллер формирования изображений может дополнительно содержать память процессора и шину, связанную с процессором, контроллером локальной памяти и памятью процессора, при этом процессор выполнен с возможностью вывода вычисленных данных сканирования в память процессора по шине и контроллер локальной памяти выполнен с возможностью передачи данных сканирования из памяти процессора в буфер данных по шине.
В некоторых вариантах осуществления буфер данных выполнен с возможностью вывода данных сканирования, без передачи данных сканирования посредством, по меньшей мере, чего-то одного из шины, памяти процессора или процессора.
В некоторых вариантах осуществления процессор выполнен с возможностью выполнения, по меньшей мере, чего-то одного из обработки изображения и вычисления данных сканирования, пока буфер данных выводит данные сканирования.
В некоторых вариантах осуществления выходной цифроаналоговый преобразователь связан с буфером данных таким образом, что данные сканирования, выводимые буфером данных, принимаются без прерывания другим системным агентом, с выдерживанием, тем самым, временного дрожания данных сканирования менее 40 микросекунд.
В некоторых вариантах осуществления выходной цифроаналоговый преобразователь выполнен с возможностью вывода сигналов сканирования в контроллеры сканирования по x- и y-осям, чтобы сканировать визуализирующим пучком; и синхронизирующих сигналов в камеру для формирования изображений, чтобы записывать отраженный визуализирующий пучок синхронно со сканированием.
В некоторых вариантах осуществления способ управления формированием офтальмологических изображений может содержать этап вычисления данных управления сканированием посредством процессора; этап сохранения данных управления сканированием в буфере данных, частично, под управлением контроллера памяти; этап передачи данных управления сканированием из буфера данных в преобразователь сигналов по специализированному каналу и этап передачи сигналов сканирования в контроллер сканирования посредством модуля вывода, при этом сигналы сканирования преобразуются из данных управления сканированием посредством преобразователя сигналов.
Этап сохранения данных управления сканированием может содержать сохранения вычисленных данных управления сканированием в памяти процессора и перемещение данных управления сканированием из памяти процессора в буфер данных.
Этап передачи данных управления сканированием может содержать передачу данных сканирования из буфера данных, без передачи данных сканирования посредством, по меньшей мере, чего-то одного из шины, соединяющей контроллер локальной памяти и процессор, памяти процессора или процессора.
Этап передачи данных управления сканированием может содержать передачу данных сканирования параллельно с выполнением процессором, по меньшей мере, чего-то одного из обработки изображения и вычисления данных сканирования, соответствующих паттерну сканирования.
Этап передачи данных управления сканированием может содержать передачу данных сканирования, без прерывания другим системным агентом, с выдерживанием, тем самым, временного дрожания данных сканирования менее 40 микросекунд.
Контроллер локальной памяти может содержать механизм прямого доступа к памяти и буфер данных может содержать память обратного магазинного типа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
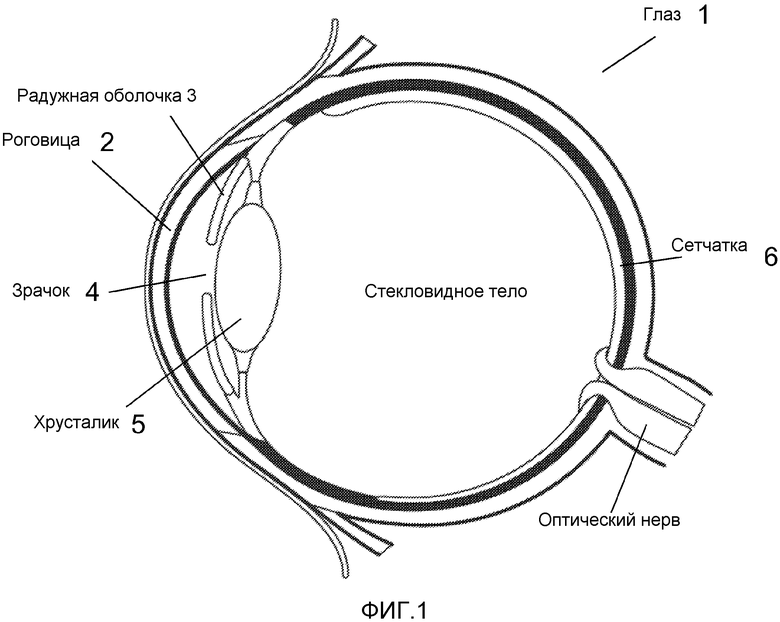
Фиг. 1 - схема человеческого глаза.
Фиг. 2 - схема офтальмологической хирургической системы.
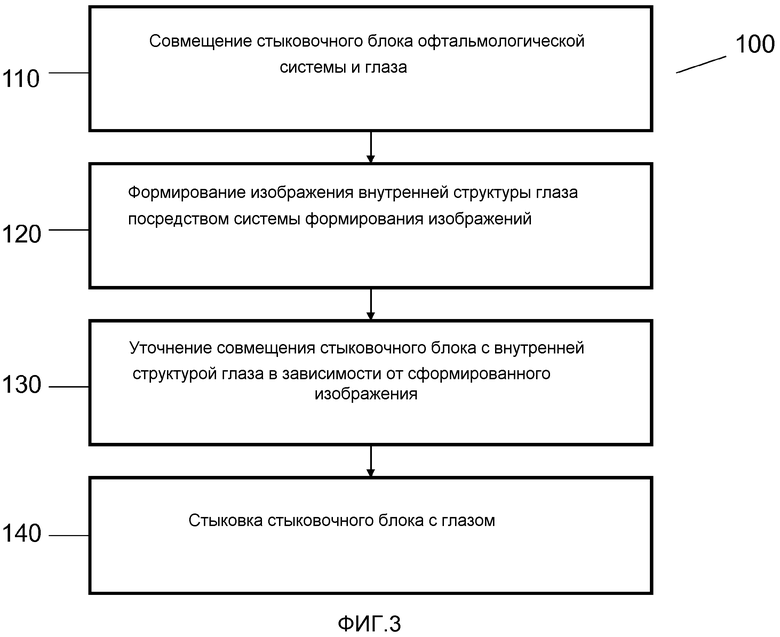
Фиг. 3 - схема способа стыковки.
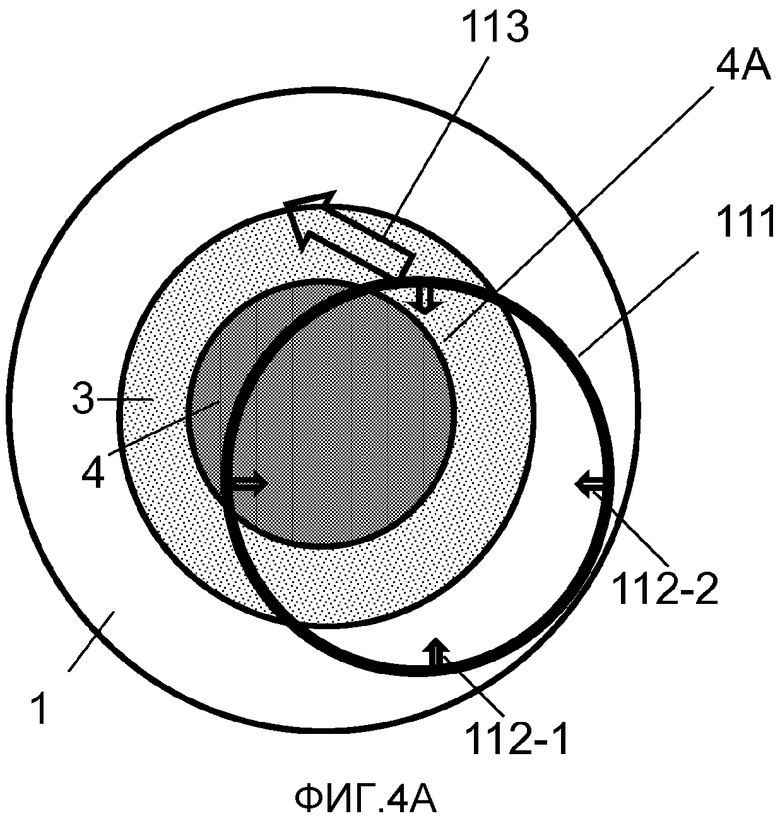
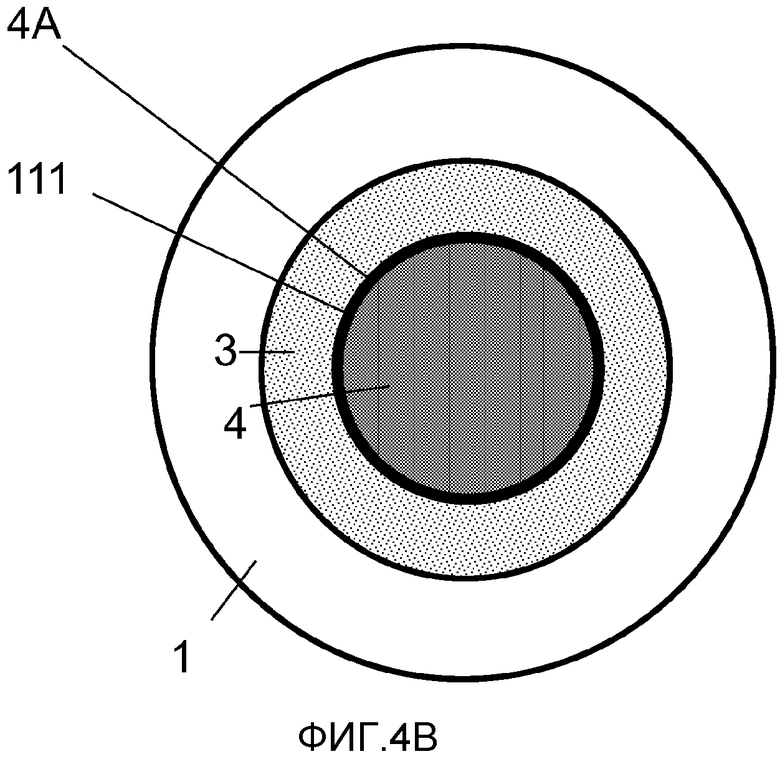
Фиг. 4A-B - схема этапа совмещения.
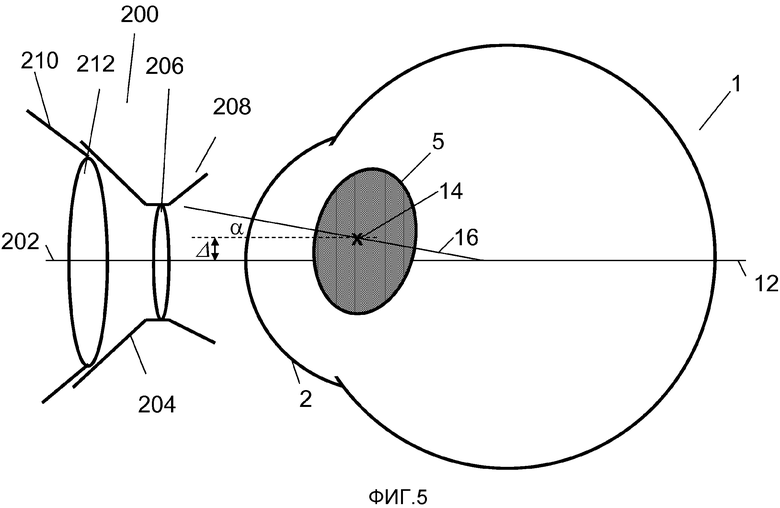
Фиг. 5 - схема наклона и смещения хрусталика относительно стыковочного блока.
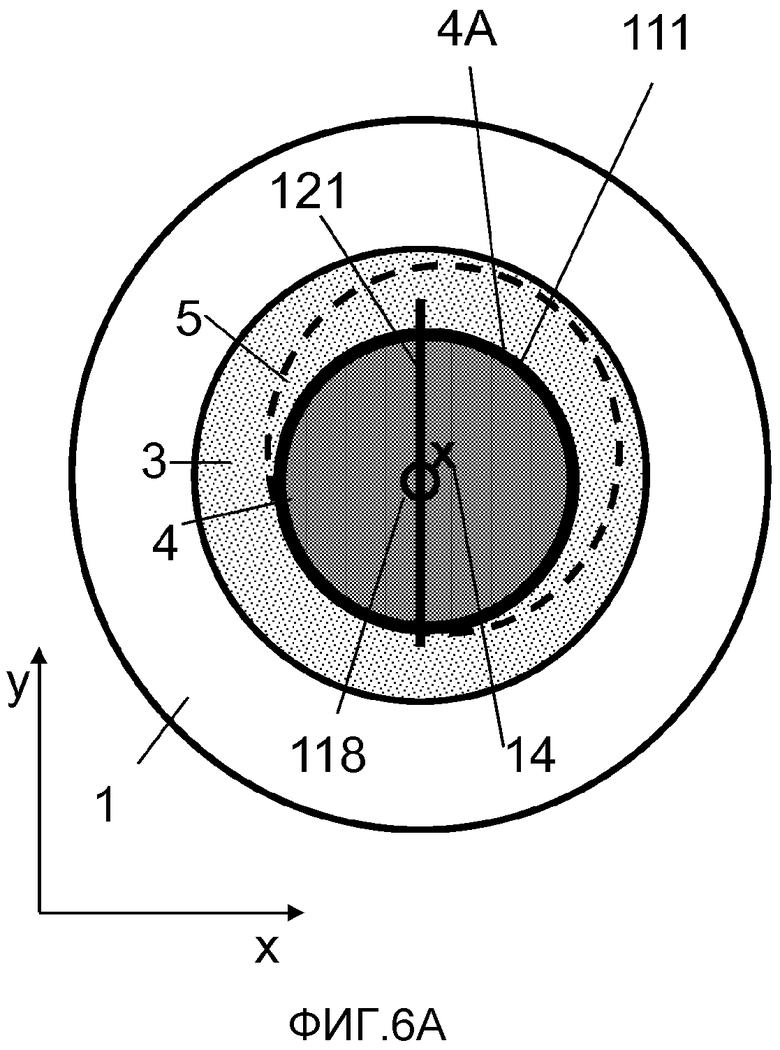
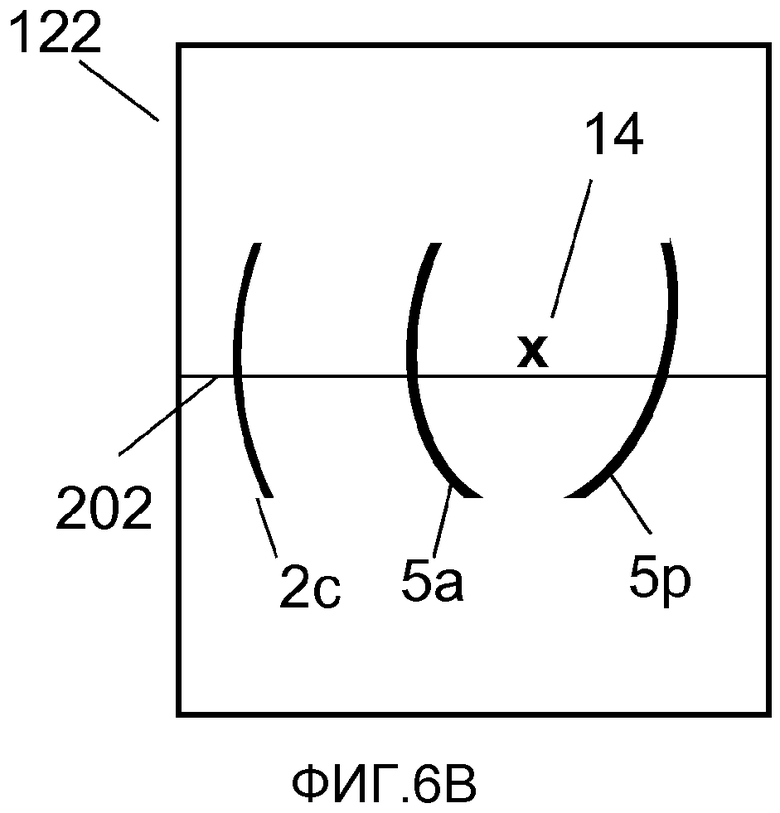
Фиг. 6A-B - схема наклоненного и смещенного хрусталика и его изображения.
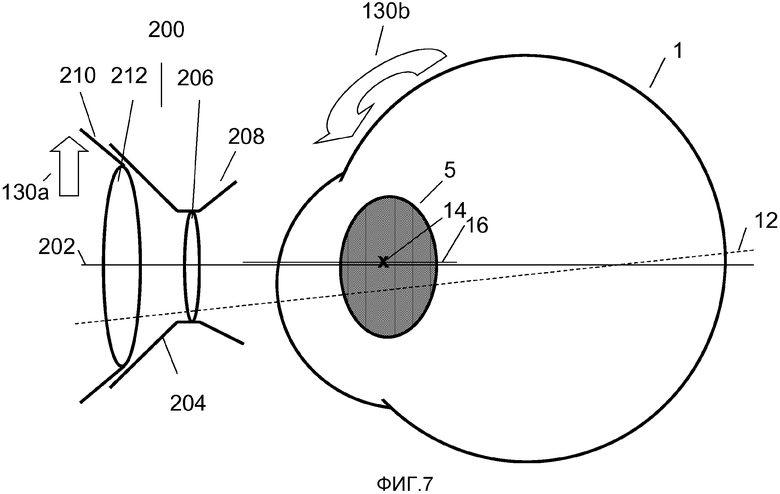
Фиг. 7 - схема уточнения совмещения между хрусталиком и стыковочным блоком.
Фиг. 8A-B - схема совмещения стыковочного блока с хрусталиком после этапа уточнения совмещения и соответствующего изображения.
Фиг. 9 - схема способа стыковки, направляемого с использованием способа формирования изображений.
Фиг. 10 - схема системы стыковки с управлением по изображениям.
Фиг. 11 - подробная блок-схема системы стыковки с управлением по изображениям.
Фиг. 12 - этапы способа управления способом стыковки с управлением по изображениям.
ПОДРОБНОЕ ОПИСАНИЕ
Многие офтальмологические хирургические системы содержат стыковочный блок или интерфейс пациента, который приходит в контакт с человеческим глазом и выдерживает его, фактически, неподвижным относительно объектива хирургической системы в процессе офтальмологической процедуры. Точность офтальмологической процедуры можно повысить повышением точности совмещения стыковочного блока с целевым объектом хирургической операции.
Во время роговичных процедур, когда операционный целевой объект, роговица, не заслонен и является видимым, совмещение интерфейса пациента с целевым объектом может выполняться хирургом сравнительно простым способом.
Однако катарактальные хирургические операции ставят более сложные задачи совмещения и стыковки интерфейса по ряду причин. Упомянутые задачи обусловлены тем, что целевой хрусталик находится внутри глаза и, следовательно, хуже виден хирургу или частично заслонен от него.
Пациентам часто также сложно совмещать свой оперируемый глаз с оптической осью офтальмологической хирургической системы, даже под руководством и при получении устных инструкций хирурга, потому, что, например, пациенты часто получают миорелаксанты или находятся в состоянии глубокой седации.
Кроме того, внутренние структуры глаза, например хрусталик, часто фиксируются их мягкими поддерживающими мышцами вне центра и с наклоном относительно видимых структур глаза, например зрачка. Поэтому, даже если хирургу удается совместить зрачок с оптической осью хирургической системы, хрусталик внутри глаза может оставаться смещенным и наклоненным.
Более того, по мере того как стыковочный блок опускают на глаз, стыковочный блок оказывает давление на глаз, что может приводить к дополнительному смещению и наклону хрусталика. Приведенная проблема может еще более усугубляться подачей разрежения для стыковки интерфейса пациента.
Реализации и варианты осуществления в настоящем описании предлагают процедуры и системы стыковки для повышения точности процедуры стыковки в процессе офтальмологических хирургических операций с помощью методов формирования изображений.
На фиг. 1 изображен человеческий глаз 1 с некоторыми подробностями. Глаз 1 содержит роговицу 2, которая получает и преломляет поступающий свет, радужную оболочку 3, зрачок 4, который обеспечивает отверстие для входа света во внутренний глаз, и хрусталик 5, который фокусирует свет на сетчатке 6. Как упоминалось выше, ось хрусталика 5 часто не совмещена с осью зрачка 2, и система мягких поддерживающих цилиарных мышц хрусталика может допускать дополнительное смещение и наклон, когда к глазу 1 прилагают давление стыковочным блоком, что усугубляет проблему неточного совмещения со стыковочным блоком.
Реализации и варианты осуществления в настоящем описании предлагают процедуры и системы стыковки для повышения точности процедуры стыковки в процессе офтальмологических хирургических операций с помощью методов формирования изображений.
На фиг. 2 представлена офтальмологическая лазерная хирургическая система 50. Хирургическая система 50 может содержать хирургическую лазерную подсистему 51, которая генерирует хирургический лазерный пучок. Хирургический лазерный пучок можно сканировать по операционной целевой области лазерным трехкоординатным (x-y-z) сканером 52. Хирургический лазерный пучок можно вводить в основной оптический путь системы делителем 53-1 пучка, перенаправляющим упомянутый пучок в объектив 54. Объектив 54 может быть частью вводного наконечника, дистального конца или объективной части или может содержать их.
В некоторых вариантах осуществления части лазерного трехкоординатного (x-y-z) сканера 52, например блок z-сканера, могут находиться после делителя 53-1 пучка в оптическом пути. Блок z-сканера может быть отдельным блоком, или может содержать по меньшей мере два блока, или может быть частью объектива 54. Каждый из x-, y- и z-сканеров может содержать по меньшей мере два функциональных блока. Например, для выполнения сканирования в x-направлении или в y-направлении можно использовать несколько зеркал или для оптимизированного сканирования по z-оси можно использовать несколько и отдельных линзовых групп.
Стыковочный блок 55 может быть присоединен, с возможностью съема, к объективу 54 для контакта с глазом 1, чтобы повысить точность прицеливания хирургического лазерного пучка в операционную целевую область в глазу. Стыковочный блок может быть объединен в одну деталь или может содержать по меньшей мере две детали. Первую часть многоэлементного стыковочного блока можно сначала присоединить к оперируемому глазу, а вторую часть стыковочного блока можно сначала присоединить к объективу 54 или вводному наконечнику. В дальнейшем, первую и вторую части стыковочного блока можно сцеплять. Стыковочный блок 55 может быть назван интерфейсом пациента, накладным наконечником, стыковочным наконечником, объективной частью или накладным устройством и может содержать контактную линзу или аппланационную линзу, которая может контактировать с глазом или может находиться около глаза.
Хирургические и стыковочные процедуры можно поддерживать различными системами формирования изображений. В некоторых хирургических системах 50, для формирования изображения операционной целевой области для хирурга может быть обеспечена первая система формирования изображений, например, офтальмологический хирургический стереомикроскоп или видеомикроскоп 56. (Офтальмологический или видео) микроскоп 56 может использовать наблюдательный или визуализирующий свет.
Визуализирующий свет может использовать общую часть основного оптического пути хирургической системы 50 или может быть спроецирован непосредственно в целевую область. В варианте осуществления с общим путем, наблюдательный свет может генерироваться вблизи микроскопа 56, затем направляться в глаз и отражаться/рассеиваться из глаза, с входом в основной оптический путь или оптическую систему хирургической системы 50 через делитель 53-1 пучка. В варианте осуществления, не содержащем общего пути, визуализирующий свет может генерироваться вблизи и снаружи объектива 54 и непосредственно проецироваться на участки глаза. В упомянутом варианте осуществления только отраженная часть визуализирующего света может направляться по основному оптическому пути системы в микроскоп 56.
Некоторые варианты осуществления могут содержать вторую систему формирования изображений в хирургической системе 50, чтобы обеспечивать данные формирования изображений внутренних структур глаза и целевой области. Синергическое использование изображений из первой и второй систем формирования изображений может обеспечить усовершенствованное управление офтальмологической процедуры, в общем, и повысить точность стыковки интерфейса пациента, в частности.
В некоторых хирургических системах 50, вторая система формирования изображений может быть системой 57 формирования изображений методом оптической когерентной томографии (ОКТ). Система 57 формирования изображений методом ОКТ (в дальнейшем система ОКТ формирования изображений) может быть, помимо прочего, системой ОКТ формирования изображений, действующей во временной области, с качающейся частотой или спектральной системой. Система ОКТ 57 формирования изображений может содержать блок ОКТ 58 формирования изображений, который создает визуализирующий пучок ОКТ, направляет визуализирующий пучок ОКТ к глазу и обрабатывает визуализирующий пучок ОКТ, отраженный из глаза. Система ОКТ 57 формирования изображений может также содержать двухкоординатный (x-y) сканер 59 для ОКТ, который сканирует визуализирующим пучком ОКТ целевую область в плоскости x-y, которая может быть, например, перпендикулярной оптической оси.
В общем, обозначение «x-y-z» применяется в настоящем описании в широком смысле: данное обозначение может относиться к сканированию по трем направлениям, которые составляют значительные углы между собой. Однако упомянутые углы не обязательно должны быть прямыми углами. Сканирование можно также выполнять либо по прямым, либо по кривым линиям, по плоским или криволинейным поверхностям, в соответствии с сеточным, растровым, концентрическим, спиральным или другим паттерном. В некоторых вариантах осуществления возможно сканирование визуализирующим пучком ОКТ посредством хирургического лазерного трехкоординатного (x-y-z) сканера 52. В других вариантах осуществления только некоторые из функций сканирования хирургическим лазерным пучком и визуализирующим пучком ОКТ выполняются общим блоком сканера, например функция сканирования по осям x-y. Некоторые системы ОКТ, например системы ОКТ во временной области, нуждаются в сканировании пучка по z-оси, а другие системы, например системы спектральной ОКТ, не нуждаются в сканировании по z-оси, так как упомянутые системы собирают данные изображений со всех глубин, по существу, одновременно.
Визуализирующий пучок ОКТ можно вводить в основной оптический путь хирургической системы 50 посредством делителя 53-2 пучка и направлять в целевую область объективом 54 и стыковочным блоком 55. В некоторых вариантах осуществления, часть или все функции сканирования по z-оси могут выполняться z-сканером, расположенным в общем оптическом пути, после делителя 53-2 пучка. z-Сканер может быть даже частью объектива 54.
На фиг. 3 представлен способ 100 стыковки для офтальмологической лазерной хирургической системы 50, при этом, способ 100 стыковки может содержать:
Этап 110 совмещения для совмещения стыковочного блока 55 офтальмологической системы 50 и глаза;
этап 120 формирования изображения для формирования изображения внутренней структуры глаза посредством системы формирования изображений;
этап 130 уточнения совмещения для уточнения совмещения стыковочного блока 55 с внутренней структурой глаза в зависимости от сформированного изображения и
этап 140 стыковки для стыковки стыковочного блока 55 с глазом.
Приведенные этапы подробно поясняются ниже.
Этап 110 совмещения может содержать использование первой системы формирования изображений для совмещения целевого паттерна офтальмологической лазерной хирургической системы 50 с характерным элементом глаза. Упомянутый этап 110 совмещения может выполняться, например, в связи со снижением стыковочного блока 55 к глазу. Первая система формирования изображений может быть офтальмологическим хирургическим микроскопом или видеомикроскопом 56.
Целевой паттерн офтальмологической лазерной хирургической системы 50 может содержать, по меньшей мере, какую-то одну из меток центра контактной линзы, центра стыковочного блока 55 или оптической оси объектива 54, стыковочного блока 55 или контактной линзы. В других вариантах осуществления целевой паттерн может содержать стыковочное кольцо, стыковочное перекрестье или любой другой стыковочный целевой паттерн, а также комбинацию вышеупомянутых паттернов. Упомянутый целевой паттерн может быть сформирован в оптической системе офтальмологического хирургического микроскопа 56 или может быть сформирован электронными средствами и отображен на дисплее или экране видеомикроскопа 56.
Характерный элемент глаза может быть центром области роговицы 2, радужной оболочки 3, зрачка 4, лимба, склеры или хрусталика 5; или кольцевым образованием, связанным с областью роговицы 2, радужной оболочки 3, зрачком 4, лимбом, склерой или хрусталиком 5.
На фиг. 4A-B показан наглядный пример этапа 110 совмещения. Как видно на фиг. 4A, видеомикроскоп 56 отображает глаз 1, как его видно через объектив 54 лазерной хирургической системы 50, и кольцо 111 целевого паттерна с регулируемым радиусом, с центром на общей оптической оси объектива 54 и стыковочного блока 55. Когда хирург опускает стыковочный блок 55 к глазу, хирург, на этапе 112 регулировки паттерна, может регулировать регулируемый радиус кольца 111 целевого паттерна вплоть до, по существу, равенства радиусу внутреннего кольцевого края 4A зрачка 4 пациента, как показано стрелками 112-1 и 112-2. Кроме того, на этапе 113 перемещения паттерна 113, хирург может также регулировать или перемещать стыковочный блок 55 в плоскости x-y, как показано стрелкой 113, чтобы совместить кольцо 111 целевого паттерна с внутренним кольцевым краем 4A зрачка 4 до, во время или после регулировки радиуса.
Радиус кольца 111 целевого паттерна можно выбрать несколько отличным от радиуса внутреннего кольцевого края 4A зрачка 4, при условии, что радиус позволяет хирургу совместить кольцо 111 целевого паттерна со зрачком 4 с требуемой точностью. В других вариантах осуществления можно возможно использование любого другого целевого паттерна, в том числе, дуговых, перекрестных и растровых паттернов, как перечислены выше.
На фиг. 4B показано, что регулировка регулируемого радиуса кольца 111 целевого паттерна на этапе 112 и перемещение стыковочного блока 55 в плоскости x-y на этапе 113 могут выполняться многократно и итерационно, пока кольцо 111 целевого паттерна, по существу, не совпадет с внутренним кольцевым краем 4A зрачка 4. Вышеописанная ситуация совмещает общую оптическую ось объектива 54 и стыковочный блок 55 с осью или центром зрачка 4.
На упомянутом этапе 110 совмещения стыковочный блок 55 может опускаться к глазу, возможно даже в физический контакт с глазом, во время регулировки положения стыковочного блока 55 в z-направлении. Однако, в любом случае, стыковочный блок 55 еще может оставаться подвижным относительно глаза, что позволяет хирургу выполнять этап 110 совмещения, возможно, итерационным методом. Даже в конце этапа 110 совмещения, стыковочный блок может оставаться подвижно соединенным с глазом, чтобы допускать возможный последующий этап совмещения.
В некоторых вариантах осуществления, этап 110 совмещения может не требовать использования целевого паттерна. В таких случаях, управление совмещением стыковочного блока 55 может быть основано, в основном, на визуальной оценке хирурга.
Варианты осуществления упомянутого этапа 110 совмещения совмещают стыковочный блок 55 и глаз с некоторой точностью. Если стыковочный блок стыкуют с глазом после этапа 110 совмещения, то офтальмологическая процедура может быть выполнена с некоторой точностью. Для некоторых процедур упомянутая точность может быть достаточной, но для других процедур, возможно, была бы полезна более высокая точность.
На фиг. 5 показана упомянутая ситуация. Даже после того, как оптическую ось 202 стыковочного блока 200 совмещают со зрачком 4 глаза на этапе 110 совмещения, хрусталик 5 глаза может оставаться смещенным и наклоненным относительно оптической оси 202, так как хрусталик 5 может быть не совмещен со зрачком 4 по одной из вышеуказанных причин. В таком случае, стыковочный блок 200 может быть вариантом осуществления стыковочного блока 55.
Как показано на фиг. 5, даже после того, как оптическую ось 12 зрачка 4 и глаза совместили с оптической осью 202 стыковочного блока 200 на этапе 110 совмещения, центр 14 зрачка 5 все еще смещен на Δ с общей оптической оси 12/202 зрачка 4 и стыковочного блока 200, и ось 16 симметрии хрусталика 5 еще составляет угол α с общей оптической осью 12/202.
В упомянутом случае, корпус или обойма 204 стыковочного блока 200, иногда называемого интерфейсом пациента, объективной частью или накладным наконечником, может содержать контактную линзу, аппланационную линзу или аппланационную пластину 206 и ограждение или гибкое уплотнение 208, которое приходит в контакт с внешней поверхностью глаза, обычно, с роговицей, лимбом или склерой. Стыковочный блок 200 может быть прикреплен к варианту осуществления объектива, вводному наконечнику или дистальному концу 210 или 54, который может содержать несколько линз, при этом, последняя линза является дистальной линзой 212.
На фиг. 6A-B несколько подробнее поясняется этап 120 формирования изображения.
На фиг. 6A показано, что, на этапе 110 совмещения, стыковочный блок 55 или 200 можно надлежащим образом совместить и центрировать со зрачком 4, с использованием видеомикроскопа 56, о чем свидетельствует кольцо 111 целевого паттерна, частично совпадающее с внутренним кольцевым краем 4A зрачка 4, и его центр 118 (обозначенный кольцом) находится в центре зрачка 4. Однако хрусталик 5, показанный штриховой линией по его внешнему периметру, скрыт из поля просмотра видеомикроскопа 56 и может находиться не по центру зрачка 4. На такое расположение указывает также центр 14 хрусталика, обозначенный символом ×, находящийся не по центру 118 целевого паттерна 111, обозначенного кольцом. Кроме того, ось 16 хрусталика 5 может быть наклонена относительно общей оси 202/12 стыковочного блока 200 и зрачка 4.
Поэтому, даже после этапа 110 совмещения, кольцо 111 целевого паттерна может быть не точно совмещенным с хрусталиком 5, и, следовательно, точность катарактальных процедур, выравниваемых по центру кольца 111 целевого паттерна, может оказаться неоптимальной. Упомянутую неоптимальную точность можно повысить посредством выполнения этапа 120 формирования изображения.
На фиг. 6A и B показано, что, в типичном случае, этап 120 формирования изображения может содержать линейное сканирование 121 через центр 118 кольца 111 целевого паттерна, который совпадает с центром зрачка 4. Упомянутое линейное сканирование 121 формирует изображение 122 в плоскости y-z, которое содержит изображение 2c роговичного сегмента и изображения 5a и 5p сегментов, соответственно, передней и задней капсул хрусталика. На изображении 122 в плоскости y-z, изображения сегментов 5a и 5p хрусталика представляются наклоненными и децентрированными относительно оптической оси 202, даже если изображение 2c роговичного сегмента представляется центрированным, так как хрусталик 5 может быть наклонен и децентрирован относительно роговицы и зрачка. Поэтому обеспечение изображений сегментов 5a и 5p хрусталика может помочь хирургу повысить точность совмещения стыковочного блока 200 с наклоненной и децентрированной линзой 5.
В других вариантах осуществления этап 120 формирования изображения может содержать формирование изображения, при линейном сканировании, по линейному паттерну, дугам, перекрестному паттерну, звездообразному паттерну, кольцевому паттерну, овальному паттерну, замкнутому паттерну, спиральному паттерну, концентрическому многокольцевому паттерну, паттерну из нескольких сдвинутых колец, линейчатому паттерну, и при двумерном сканировании в координатах x-y, по растровому или сеточному паттерну и паттерну с удаленными точками.
Этап 120 формирования изображения может содержать формирование изображения с помощью варианта осуществления системы 57 формирования изображений методом оптической когерентной томографии (ОКТ), подробное описание приведено выше и ниже. Этап 120 формирования изображения может быть также выполнен другой системой формирования изображений, способной формировать изображения внутренней структуры глаза.
На фиг. 7 показано, что совмещение стыковочного блока 200 с хрусталиком 5 можно сделать более точным посредством этапа 130 уточнения совмещения на основании этапа 120 формирования изображения.
В соответствии с одним аспектом, этап 130 уточнения совмещения может содержать выделение позиционной информации, касающейся хрусталика 5, из сформированного изображения 122 и регулировку положения, по меньшей мере, чего-то одного из глаза 1 или стыковочного блока 200 в зависимости от выделенной позиционной информации. В некоторых вариантах осуществления, возможно прицеливание на другие внутренние структуры глаза, например, ядро хрусталика или структуру сетчатки.
В одном варианте осуществления хирург может анализировать изображение 122 в плоскости, сформированное на этапе 120 формирования изображения, и определять смещение Δ центра 14 хрусталика с оптической оси 202 стыковочного блока 200. На основании упомянутого определения, хирург может сдвигать либо глаз, либо стыковочный блок, либо и глаз и стыковочный блок, чтобы устранить упомянутое смещение Δ, как показано стрелкой 130a. Упомянутый этап 130 уточнения совмещения может уменьшать или даже исключать смещение Δ между центром 14 хрусталика и оптической осью 202. Обычно указанное смещение 130a может смещать оптическую ось 202 стыковочного блока 200 с оптической оси 12 хрусталика 5.
Сдвиг 130a можно выполнять итерационно, поскольку хирург может неточно определить смещение Δ с первой попытки. Для исправления упомянутой неточности в некоторых вариантах осуществления, за этапом 130 уточнения совмещения может следовать повторный этап 120' формирования изображения для определения, как изменилось смещение Δ' в результате сдвига 130a. За упомянутом повторным этапом 120' формирования изображения может следовать повторный этап 130' уточнения совмещения на основе обновленного изображения 122', сформированного на повторном этапе 120' формирования изображения, и так далее. В эффективно действующих вариантах осуществления, смещение Δ поэтапно уменьшается. В других вариантах осуществления, даже если Δ увеличивается на некотором этапе, последующие этапы уменьшают упомянутое смещение, в конечном счете.
Сдвиг 130a можно выполнять посредством выдачи устной команды пациенту, чтобы тот переместил свой глаз, или посредством физического перемещения головы пациента или хирургического стола, на котором покоится пациент, или посредством ручного перемещения глаза пациента, или посредством перемещения фиксирующего света от источника фиксирующего света, или посредством перемещения направляющего света на дисплее направляющего света, при этом, в каждом случае, с выдачей указания пациенту сопровождать свет его глазом, или посредством перемещения стыковочного блока 200 в плоскости x-y посредством перемещения гентри или шарнирной консоли. В вариантах осуществления с использованием составных стыковочных блоков деталь, которую присоединили к глазу, например захватное устройство, можно использовать для перемещения или поворота глаза. Фиксирующий или направляющий свет может быть направлен либо в оперируемый глаз, либо в неоперируемый глаз. Приведенные регулировки могут выполняться вручную хирургом или посредством приведения в действие по меньшей мере одного электропривода, или посредством компьютера. В некоторых случаях возможно совместное выполнение по меньшей мере двух сдвигов вышеописанного типа.
На фиг. 7 показано также, что в других вариантах осуществления этап 130 уточнения совмещения может содержать выделение ориентационной информации, касающейся хрусталика 5 или другой целевой внутренней структуры глаза, из сформированного изображения 122 и регулировку ориентации, по меньшей мере, чего-то одного из глаза 1 или стыковочного блока 200 в зависимости от выделенной ориентационной информации.
В одном варианте осуществления, хирург может анализировать изображение 122 в плоскости y-z, сформированное на этапе 120 формирования изображения, и определять угол α между оптической осью 16 хрусталика 5 и оптической осью 202 стыковочного блока 200. На основании упомянутого определения, хирург может повернуть либо глаз, либо стыковочный блок или сдвинуть стыковочный блок, или отрегулировать оптический путь лазерного пучка в лазерной хирургической системе 50, чтобы устранить упомянутое неточное совмещение. Вариант поворота глаза указан стрелкой 130b. Упомянутый этап 130 уточнения совмещения может уменьшать или даже устранять угол α между оптической осью 16 хрусталика 5 и оптической осью 202 стыковочного блока 200. Вышеописанное уточнение совмещения, обычно, обеспечивают введением угла между оптической осью 12 глаза и оптической осью 202 стыковочного блока 200, как указано штриховой линией.
Поворот 130b можно выполнять итерационно, поскольку хирург может неточно определить угол α с первой попытки. Для исправления упомянутой неточности в некоторых вариантах осуществления, за этапом 130 уточнения совмещения может следовать повторный этап 120' формирования изображения для определения, как изменился угол после поворота 130b, по повторному изображению 122', с последующим повторением этапа 130' уточнения совмещения на основании изображения 122', сформированного на повторном этапе 120' формирования изображения, и так далее. В эффективно действующих вариантах осуществления, угол α поэтапно уменьшается. В других вариантах осуществления, даже если α увеличивается на некотором этапе, последующие этапы уменьшают упомянутый угол, в конечном счете.
Этап 130b поворота можно выполнять посредством выдачи устной команды пациенту, чтобы тот переместил свой глаз, или посредством ручного поворота головы пациента, или посредством физического поворота глаза пациента, или посредством перемещения фиксирующего света от источника фиксирующего света или направляющего света, отображаемого на дисплее, при этом, в каждом случае, с выдачей указания пациенту сопровождать свет его глазом, или посредством перемещения или поворота стыковочного блока 200 в плоскости x-y посредством перемещения гентри или шарнирной консоли. Фиксирующий или направляющий свет может быть направлен либо в оперируемый глаз, либо в неоперируемый глаз. В вариантах осуществления с использованием составных стыковочных блоков, деталь, которую присоединили к глазу, например, захватное устройство, можно использовать для перемещения или поворота глаза. Приведенные регулировки могут выполняться вручную хирургом или посредством приведения в действие по меньшей мере одного электропривода, или посредством компьютера. В некоторых случаях возможно совместное выполнение по меньшей мере двух сдвигов вышеописанного типа.
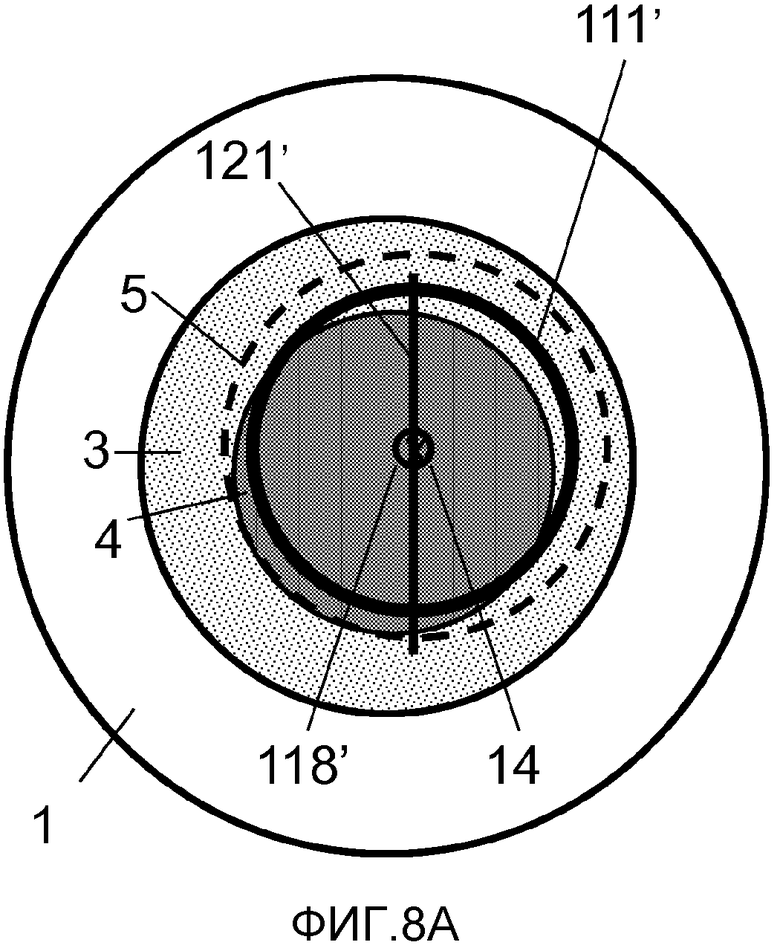
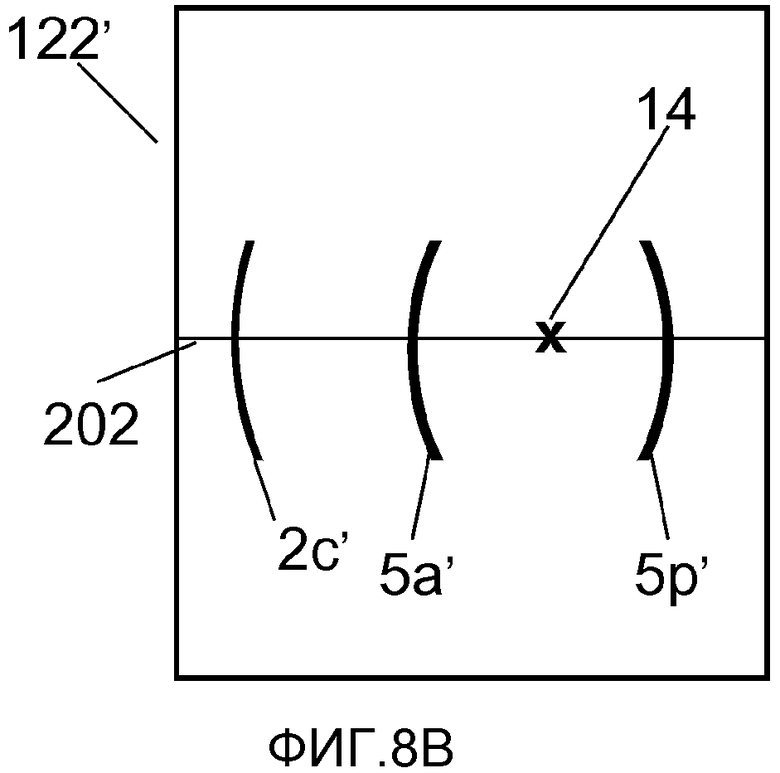
На фиг. 8A-B представлен результат этапа 120 формирования изображения и этапа 130 уточнения совмещения.
На фиг. 8A видно, что, после успешного этапа 130 уточнения совмещения, сдвинутое 111' кольцо целевого паттерна может стать концентричным хрусталику 5, а не зрачку 4. Соответственно, сдвинутая линия 12 линейного сканирования через сдвинутый центр 118' кольца 111' целевого паттерна может теперь проходить через центр 14 хрусталика 5, а не через центр зрачка 4.
В некоторых вариантах осуществления возможно отображение как первого кольца 111 целевого паттерна, концентричного зрачку 4, так и второго целевого паттерна 111', который сдвинут на этапе 130 уточнения совмещения до концентричности относительно хрусталика 5.
На фиг. 8B показано, что после эффективного этапа 130 уточнения совмещения на повторном этапе 120' формирования изображения может быть записано изображение 122' в плоскости сечения y-z, показывающее, что теперь центр 14 хрусталика находится на оптической оси 202 стыковочного блока 200. Кроме того, изображения сегментов 5a' и 5p' передней и задней капсулы после относительного поворота и сдвига глаза и стыковочного блока 200 почти симметричны и, тем самым, свидетельствуют, что оптическая ось 16 хрусталика приблизительно совмещена с оптической осью 202 стыковочного блока 200.
Обеспечение совмещения стыковочного блока 55/200 со скрытым от наблюдения, смещенным и наклоненным хрусталиком 5, а не с видимым зрачком 4, с упомянутой повышенной точностью является одним из преимуществ способа 100 стыковки с управлением по изображениям.
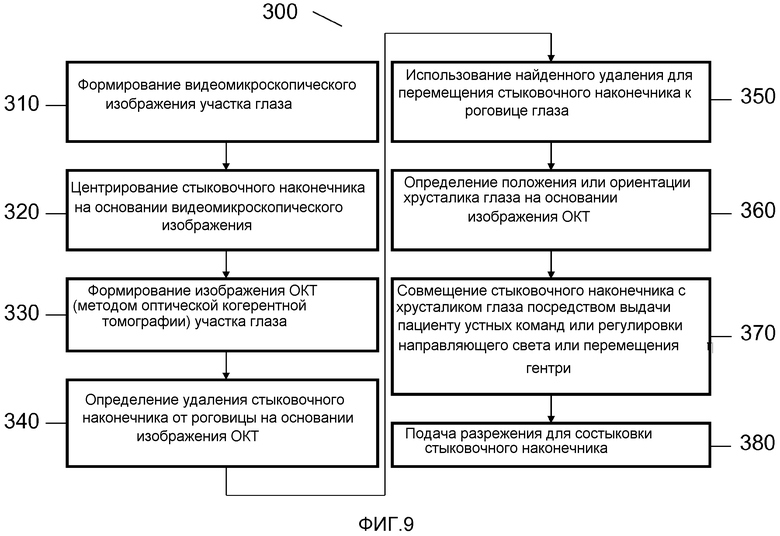
На фиг. 9 показано, что варианты осуществления родственного способа 300 стыковки с управлением по изображениям может содержать следующие этапы:
этап 310 формирования видеоизображений для формирования видеомикроскопического изображения участка глаза;
этап 320 центрирования для центрирования стыковочного наконечника на основании видеомикроскопического изображения;
этап 330 формирования изображения методом ОКТ для формирования изображения ОКТ участка глаза;
дистанциометрический этап 340 для определения удаления стыковочного наконечника от роговицы на основании изображения ОКТ;
этап 350 перемещения для использования найденного удаления для перемещения стыковочного наконечника к роговице глаза;
определительный этап 360 для определения положения или ориентации хрусталика глаза на основании изображения ОКТ;
этап 370 совмещения для совмещения стыковочного наконечника для совмещения стыковочного наконечника с хрусталиком глаза посредством выдачи пациенту устных команд или регулировки направляющего света или перемещения гентри и
стыковочный этап 380 для подачи разрежения, чтобы состыковать стыковочный наконечник.
Некоторые из этапов 310-380 способа 300 могут выполняться аналогично соответствующим этапам способа 100. Кроме того, дистанциометрический этап 340 может содержать определение расстояния между роговицей 2 глаза и стыковочным наконечником, который может быть стыковочным блоком 55 или 200 или любым другим интерфейсом пациента. На упомянутом этапе 340, расстояние от стыковочного наконечника может базироваться на реперной точке. Упомянутая реперная точка может находиться в оптической системе хирургической лазерной системы 50, например, в объективе 54. Упомянутая реперная точка может быть подвижной и может допускать регулировку или сдвиг по различным соображениям.
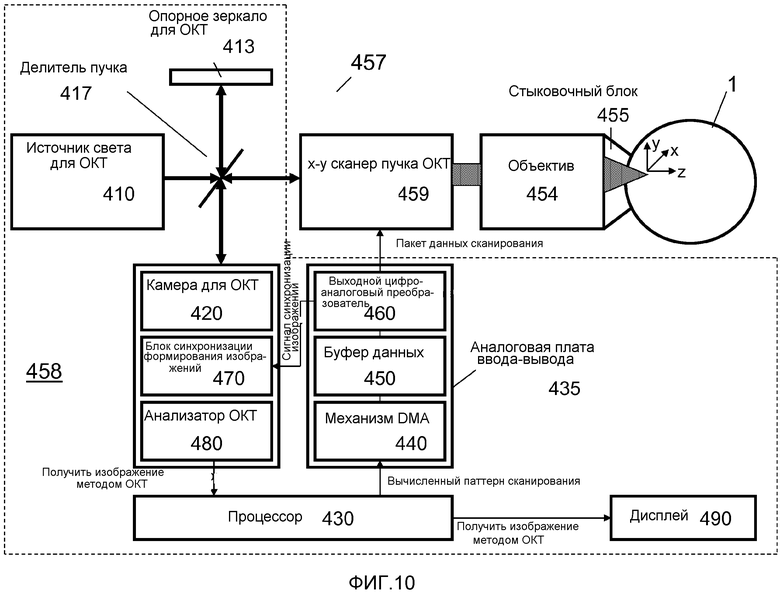
На фиг. 10 представлена система ОКТ 457 формирования изображений для более подробного пояснения этапа формирования изображения. Система ОКТ 457 формирования изображений может содержать блок ОКТ 458 формирования изображений и двухкоординатный (x-y) сканер 459 для ОКТ.
Принципы работы систем ОКТ формирования изображений широко известны и описаны в литературе. Система ОКТ 457 может системой ОКТ (a) во временной области, (b) с источником качающейся частоты или (c) спектральной. Системы ОКТ формирования изображений типов (a) и (b) используют узкополосный источник 410 света для ОКТ и сканируют фокальную точку пучка в z-направлении, и, тем самым, упомянутые системы обеспечивают информацию для формирования изображений, соответствующую разным глубина по z-оси, последовательно во времени. Системы ОКТ типа (a) во временной области перемещают опорное зеркало, а системы ОКТ типа (b) с качающейся частотой перестраивает длину волны лазерного пучка.
Системы спектральной ОКТ типа (c) используют широкополосный источник 410 света для ОКТ формирования изображений и, по существу, одновременно или параллельно получают изображения в диапазоне глубин по z-оси, соответствующие разным длинам волн в широком диапазоне источника света для ОКТ формирования изображений. Благодаря упомянутой возможности параллельного формирования изображений системы спектральной ОКТ могут работать, по существу, быстрее, чем системы последовательной ОКТ. Системы ОКТ типов (b) и (c) иногда называют системами временной ОКТ.
Все типы блоков ОКТ 458 формирования изображений могут содержать источник 410 света для ОКТ, опорное зеркало 413 для ОКТ и делитель 417 пучка. В системах последовательной ОКТ, например, временной ОКТ типа (a), источник 410 света для ОКТ может быть узкополосным лазером, и опорное зеркало 413 может быть подвижным для сканирования по z-оси. При источнике света для ОКТ типа (b) от опорного зеркала не требуется подвижности, так как изменяют длину волны источника 410 света. В системах для параллельной ОКТ типа (c) источник 410 света для ОКТ может излучать широкополосный визуализирующий свет.
Визуализирующий пучок ОКТ может отклоняться двухкоординатным (x-y) сканером 459 пучка для ОКТ для направление в глаз через объектив 454 и стыковочный блок 455. Двухкоординатный (x-y) сканер 459 для ОКТ может сканировать визуализирующим пучком ОКТ внутри глаза в x- и y-направлениях. В системах последовательной ОКТ пучком сканируют по z-оси посредством перемещения либо опорного зеркала 413 или посредством перестройки длины волны источника 410 света для ОКТ. В системах параллельной ОКТ сканирование по z-оси не выполняется, так как разные длины волн переносят информацию, соответствующую разным глубина z, по существу, одновременно.
Во всех упомянутых системах визуализирующий пучок ОКТ, отраженный из глаза, можно объединять с опорным пучком, отраженным опорным зеркалом 413 для ОКТ в делителе 417 пучка. Упомянутый объединенный пучок содержит информацию для формирования изображения в сложной интерференционной картине, которая записывается камерой 420 для ОКТ.
Для систем последовательной ОКТ упомянутая камера 420 для ОКТ может быть простой, например, содержащей фотоприемник. Для систем параллельной ОКТ блок ОКТ 458 формирования изображений может содержать спектрометр, например призму или решетку (не показанные непосредственно), которая разлагает широкополосный визуализирующий свет на его составляющие разных длин волн и отклоняет составляющие разных длин волн под разными пространственными углами. В некоторых системах параллельной ОКТ камера 420 для ОКТ может содержать линейную матрицу приемников ПЗС (на основе приборов с зарядовой связью) для получения упомянутых расходящихся лучей с разными длинами волн, каждый из которых содержит специфическую информацию, касающуюся интерференции на собственной длине волны упомянутого приемника. В других системах возможно применение двумерной матрицы ПЗС. Амплитуда разложенных расходящихся лучей может записываться в отдельных пикселях матрицы ПЗС камеры 420 для ОКТ. Некоторые высокоразрешающие камеры 420 для ОКТ могут содержать сотни или даже тысячи пикселей.
Процесс формирования изображений может осуществляться под управлением блока 470 синхронизации формирования изображений, который может получать свой синхронизирующий сигнал из нижеописанного блока вывода. Данные изображения из камеры 420 для ОКТ могут направляться в анализатор ОКТ 480, синхронизируемый блоком 470 синхронизации формирования изображений. В системах параллельной ОКТ анализатор ОКТ 480 может содержать процессор для выполнения быстрого преобразования Фурье (БПФ). БПФ преобразует информацию, касающуюся интерференции составляющих разных длин волн, в информацию изображения, соответствующую разным глубинам по оси z. После БПФ преобразованные данные изображения ОКТ представляют информацию изображения, соответствующую диапазону глубин по оси z. Упомянутые преобразованные данные изображения ОКТ могут быть переданы в процессор 430, который может сформировать изображение ОКТ и выдать сформированное изображение ОКТ в дисплей 490.
Далее приведено описание системы контроллера сканирующего пучка ОКТ, который устраняет сложности работы некоторых существующих контроллеров сканирующего пучка ОКТ, которые описаны ниже.
В некоторых системах ОКТ формирования изображений процессор 430 может работать с несколькими задачами и выполнять по меньшей мере две функции в режиме чередования, параллельном режиме или режиме с перекрытием. Для выполнения упомянутых функций, процессор может выполнять «прерывание» посредством переключения из, например, задачи сканирования пучка в другую задачу и обратно. Упомянутые прерывания, несмотря на кратковременность, могут создавать проблемы, так как во время, когда сканирование приостанавливается или фиксируется прерыванием, лазерный пучок может оставаться направленным в одно и то же положение. Упомянутая фиксация сканирования может разрывать временную диаграмму сканирования в координатах x-y, с внесением ошибки и шума в координаты отображаемого местоположения. Упомянутая временная ошибка в выводимых данных сканирования может приводить к задержкам, которые могут достигать 50, 100 или более микросекунд, явлению, иногда называемому временным дрожанием. Кроме того, продолжительное воздействие лазерного пучка может вызвать повреждение чувствительной ткани глаза.
Кроме того, поскольку процессор обычно обменивается данными с агентами ввода/вывода по системной шине, то упомянутый режим вывода обеспечивает только невысокие скорости передачи данных, так как доступ к шине могут получать одновременно несколько агентов, каждый из которых нуждается в части собственного времени цикла. Кроме того, чтобы справиться с приведенными конкурирующими требованиями, участок цикла системной шины, обычно, отбирается управляющими сигналами. И если система ОКТ формирования изображений выполнена с возможностью исключения упомянутой фиксации сканирования, выполняемой процессором, выводящим данные сканирования в блок вывода в однозадачном режиме, например по специализированной линии, то процессор не может выполнять другие функции во время упомянутого этапа вывода, например вычисление следующего паттерна сканирования. Все упомянутые схемные решения и ограничения значительно снижают быстродействие таких систем.
Варианты осуществления контроллера сканирующего пучка ОКТ, предлагаемые в настоящей заявке, могут справляться с упомянутыми проблемами благодаря применению эффективного схемного решения. Контроллер сканирующего пучка ОКТ может содержать процессор 430 и аналоговую плату 435 ввода-вывода. Процессор 430 может вычислять данные сканирования для паттерна сканирования. Упомянутые данные сканирования могут содержать, например, последовательность координат x-y точек, куда визуализирующий пучок ОКТ будет направляться в целевой области во время сканирования. Для систем последовательной ОКТ со сканированием по оси z, данные сканирования могут содержать координаты x-y-z. Как изложено выше, паттерны сканирования ОКТ могут быть разнообразными паттернами, в том числе линейными, дуговыми, замкнутыми, кольцевыми, спиральными, растровыми и сетчатыми паттернами.
Процессор 430 может вычислять данные сканирования, а также выполнять другие свои описанные функции в сочетании с носителем данных, который хранит машинный код или набор команд для поддержки упомянутых функций процессора.
Аналоговая плата 435 ввода-вывода может содержать локальный или специализированный контроллер 440 памяти, называемый также механизмом 440 прямого доступа к памяти или механизмом DMA 440. Механизм DMA/контроллер 440 памяти может управлять передачей вычисленных данных сканирования, по обходному пути или непосредственно, из процессора 430 в буфер 450 данных. Буфер 450 данных, связанный с контроллером 440 локальной памяти может сохранять данные сканирования и выводить данные сканирования в выходной цифроаналоговый преобразователь 460 или выходной ЦАП 460. Выходной ЦАП 460 может быть связан с буфером 450 данных и может (i) преобразовывать выбранные выведенные данные сканирования в аналоговые сигналы сканирования и (ii) выводить сигналы сканирования в двухкоординатный (x-y) (или трехкоординатный (x-y-z)) сканер 459 пучка ОКТ.
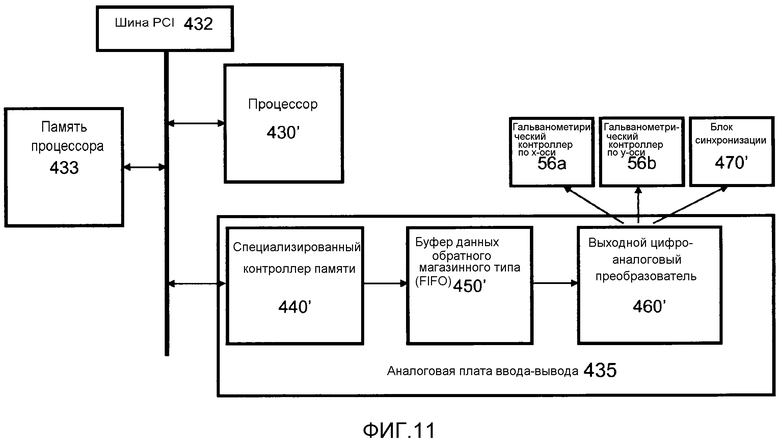
На фиг. 11 представлен вариант осуществления контроллера сканирующего пучка ОКТ. Процессор 430' может быть подключен к шине 432, например шине PCI 432. Контроллер сканирующего пучка ОКТ может также содержать процессор 433 памяти. Процессор 430' может выдавать вычисленные данные сканирования в память 433 процессора. Специализированный механизм DMA 440' может передавать данные сканирования из памяти 433 процессора в буфер 450' данных, который может быть, например, памятью обратного магазинного типа (FIFO). Буферная память FIFO 450' может сохранять данные сканирования и выводить сохраненные данные сканирования в выходной ЦАП 460', когда поступает указание. В некоторых вариантах осуществления процессор может выводить данные сканирования в аналоговую плату 435 ввода-вывода по специализированной шине памяти или локальной шине, вместо шины PCI 432. В других вариантах осуществления, между процессором и механизмом DMA 440' возможно даже прямое соединение.
В отношении вышеописанных проблем с другими системами варианты осуществления настоящего контроллера сканирующего пучка ОКТ предлагают высокоскоростную операцию сканирования, так как (i) память FIFO 450' может без прерываний выводить сохраненные данные сканирования; (ii) режим вывода может быть режимом высокоскоростной передачи данных, например пакетно-монопольным режимом; и (iii) вывод может осуществляться без передачи данных сканирования по общей шине 432, через память 433 процессора или процессор 430'.
По всем приведенным причинам вывод данных сканирования не будет прерываться конкурирующими задачами или замедляться низкоскоростной передачей данных, характерной для общей шины 432.
Кроме того, поскольку выводом данных сканирования управляет память FIFO 450', то процессор 430' освобождается для выполнения других функций параллельно с выводом данных, например обработки изображения или вычисления новых данных сканирования, соответствующих паттерну сканирования, или выполнения функции управления.
Кроме того, вывод данных сканирования из буфера 450' данных в выходной ЦАП 460' не замедляется прерыванием, выполняемым процессором 430 или другим системным агентом, также потому, что вывод происходит из буфера 450' данных по специализированному каналу на аналоговой плате 435 ввода-вывода вместо общей шины 432. Подобные варианты осуществления могут значительно ослаблять временное дрожание, например выдерживать его на меньше 50, 40 или даже 20 микросекунд.
В некоторых вариантах осуществления выходной ЦАП 460' может преобразовывать полученные цифровые данные сканирования в аналоговые сигналы сканирования и выдавать сигналы сканирования в гальванометрические контроллеры 56a и 56b по x- и y-осям или контроллеры сканирования некоторых других типов, которые управляют гальванометрическими зеркалами отклонения по x- и y-осям или элементами, изменяющими направление, чтобы сканировать визуализирующим пучком ОКТ в соответствии с паттерном сканирования, кодированным в данных сканирования. Некоторые варианты осуществления могут содержать объединенный двухкоординатный (x-y) гальванометрический контроллер, который управляет зеркалом, способным поворачиваться вокруг двух осей.
Выходной ЦАП 460' может также выдавать синхронизирующие сигналы в блок 470' синхронизации формирования изображений, связанный с камерой 420 для формирования изображений ОКТ, чтобы записывать отражаемый визуализирующий пучок ОКТ синхронно со сканированием визуализирующим пучком ОКТ. В основе синхронизирующих сигналов могут быть данные синхронизации, вставляемые процессором 430' в данные сканирования.
Кроме того, этап 120 формирования изображения может содержать вычисление данных приведения в расчетную точку, соответствующих паттерну приведения в расчетную точку, соединяющему конечную точку первого этапа формирования изображения с начальной точкой следующего второго этапа формирования изображения. Упомянутый этап может быть полезен в вариантах осуществления, в которых первый этап формирования изображения заканчивается просто прекращением вывода данных сканирования, что оставляет сканирующие гальванометрические контроллеры 56a-b по x- и y-осям в нестандартном положении и визуализирующий пучок, направленным в нестандартную целевую точку. Упомянутая нестандартная точка, обычно, отличается от начальной точки следующего второго этапа формирования изображения, из-за чего сканирующие гальванометрические контроллеры 56a-b по x- и y-осям требуется «приводить в расчетную точку» посредством вычисления и вывода данных приведения в расчетную точку, чтобы визуализирующий пучок мог начинать следующий второй этап формирования изображения с четко заданной начальной точки.
Например, первый этап формирования изображения может содержать сканирование x- и y-осям визуализирующим пучком по первому кольцу с первым радиусом. Если второй этап формирования изображения содержит сканирование по второму кольцу со вторым радиусом, то за первым этапом формирования изображения может следовать вычисление данных приведения в расчетную точку, которые задают путь из конечной точки первого кольцевого сканирования с первым радиусом в начальную точку второго кольцевого сканирования со вторым радиусом.
В подобных вариантах осуществления могут отсутствовать перемещения визуализирующего пучка обратно в стандартную точку, например, в центр, начало координат или иную несмещенную точку, что дополнительно экономит время и дополнительно ускоряет операцию сканирования.
Этап вычисления данных приведения в расчетную точку может быть также полезен в вариантах осуществления, в которых, в конце первого этапа формирования изображения, гальванометрические контроллеры 56a и 56b по x- и y-осям возвращаются в нейтральное положение, так как такой возврат облегчает вычисление начального положения второго этапа формирования изображения относительно нейтрального положения.
В некоторых вариантах осуществления скорость вывода выходного ЦАП 460/460' может быть настолько высокой, что быстродействие системы 457 формирования изображений может ограничиваться время интегрирования камеры 420 для ОКТ.
В некоторых вариантах осуществления выходной ЦАП 460/460' может выводить сигналы сканирования со скоростью в пределах одного из следующих диапазонов: 1 Гц-1 МГц, 100 Гц-1 МГц или 1 кГц-100 кГц.
В некоторых вариантах осуществления скорость вывода сигналов сканирования может быть регулируемой в соответствии с требованиями задачи и паттерна формирования изображений.
После того как этап 120 формирования изображения выполнен, этап 130 уточнения совмещения может содержать выдачу устной команды пациенту на основании изображения внутренней структуры глаза, например, хрусталика 5.
Этап 130 уточнения совмещения может также содержать обеспечение фиксирующего светового пучка, с требованием к пациенту смотреть на фиксирующий свет, и регулировку фиксирующего света на основании изображения, обеспеченного на этапе 120 формирования изображения. Фиксирующий свет можно подавать в оперируемый глаз по основному оптическому пути лазерной хирургической системы 50 или посредством отдельной системы фиксирующего света. В некоторых случаях, фиксирующий свет можно подавать в неоперируемый глаз.
Этап 130 уточнения совмещения можно начинать (i) до того, как стыковочный блок 55/200 придет в контакт с глазом; (ii) после того, как стыковочный блок 55/200 придет в контакт с глазом, но перед подачей вакуума; или (iii) после подачи частичного вакуума в стыковочный блок 55/200, которые, тем не менее, допускает в некоторой степени изменение совмещения.
Частичный вакуум или разрежение можно подавать, например, посредством вакуумного кольца или вакуумного ограждения, которое может быть частью стыковочного блока 55/200. Разрежение можно подавать после того, как стыковочный блок приведен в физический контакт с глазом.
Способ 100 стыковки может выполняться в составе хирургического процесса или диагностического процесса. В других вариантах осуществления способ 100 стыковки может выполняться в составе процедуры формирования изображения, которая не является частью хирургической или диагностической процедуры, например процесса идентификации.
Этапы 110-140 могут содержать программные коды или наборы команд, которые хранятся в системе 57 формирования изображений. Код может храниться, например, в специализированной памяти или в памяти, которая является частью другого функционального блока. Этап 110 совмещения может содержать код, хранящийся в памяти, относящейся к видеомикроскопу 56. Этап 120 формирования изображения может содержать запись паттернов сканирования или данных сканирования, сформированных процессором 430, в специализированной или объединенной памяти, или запись данных сканирования в буфере 450 данных. Этап 130 уточнения совмещения может содержать использование блока памяти для хранения сформированного изображения для поддержки уточнения совмещения стыковочного блока 55 с хрусталиком глаза 1 в зависимости от сформированного изображения. Этап 140 стыковки может также использовать хранящуюся программу для направления и управления стыковкой стыковочного блока 200 с глазом.
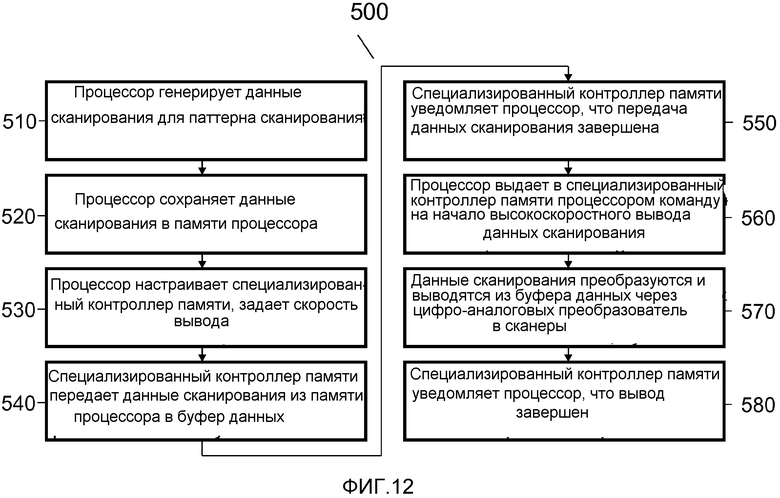
На фиг. 12 показано, что вариант осуществления способа 500 высокоскоростного формирования изображений может содержать:
этап 510 вычисления данных управления сканированием посредством процессора 430/430';
этап 520 сохранения данных управления сканированием в памяти 433 процессора при посредстве процессора 430;
этап 530 настройки специализированного контроллера 440/440' памяти для операции сканирования посредством назначения рабочих параметров, например скорости вывода данных сканирования;
этап 540 передачи данных управления сканированием из памяти 433 процессора в буфер 450/450' данных, по меньшей мере частично, под управлением специализированного контроллера 440/440' памяти;
этап 550 уведомления процессора 430/430' специализированным контроллером 440/440' памяти/механизмом DMA о том, что передача данных управления сканированием завершена;
этап 560 выдачи в специализированный контроллер 440/440' памяти процессором 430/430' команды на начало высокоскоростного вывода данных управления сканированием;
этап 570 передачи данных управления сканированием из буфера 450/450' данных в выходной ЦАП 460/460', по меньшей мере частично, под управлением специализированного контроллера 440/440' памяти, при этом, выходной ЦАП 460/460' преобразует цифровые данные управления сканированием в аналоговые сигналы управления сканированием, и выходной ЦАП 460/460' выводит аналоговые сигналы управления сканированием в сканеры 56a и 56b по x- и y-осям, и в блок 470 синхронизации;
этап 580 уведомления процессора 430/430' специализированным контроллером 440/440' памяти о том, что процесс вывода завершен.
На этапе 570 передача данных управления сканированием из буфера 450/450' данных может выполняться в режиме высокоскоростной передачи, например пакетно-монопольном режиме, или постраничном режиме, или любых подобных режимах высокоскоростной передачи.
На этапе 570 передача данных управления сканированием из буфера 450/450' данных может выполняться без передачи данных управления сканированием по шине 432, которая соединяет контроллер 440 локальной памяти, процессор 430 и память 433 процессора.
На этапе 570 этап передачи может также содержать передачу данных управления сканированием параллельно с выполнением процессором 430 обработки изображения или вычисления данных сканирования, соответствующих паттерну сканирования.
На этапе 570 этап передачи может также содержать передачу данных сканирования без прерывания другим системным агентом, что выдерживает временное дрожание данных сканирования менее 50, 40 или 20 микросекунд.
В варианте осуществления 600 вышеприведенного способа 500 вышеописанные этапы могут быть организованы в виде следующих этапов:
этап 610 вычисления данных управления сканированием посредством процессора может содержать этап 510;
этап 620 сохранения данных управления сканированием в буфере данных, частично, посредством контроллера локальной памяти может содержать этапы 520, 530, 540 и 550;
этап 630 передачи данных управления сканированием из буфера данных в режиме высокоскоростной передачи в модуль преобразования-вывода может содержать этапы 560 и элементы этапа 570 и
этап 640 вывода сигналов сканирования в контроллеры сканирования, в этом сигналы сканирования преобразованы из данных управления сканированием модулем преобразования-вывода, может содержать элементы этапа 570.
Хотя настоящее описание содержит множество конкретных деталей, приведенные конкретные детали нельзя интерпретировать в смысле ограничения объема любого изобретения или того, на что можно притязать, а в качестве описаний признаков, специфических для конкретных вариантов осуществления. Некоторые признаки, которые представлены в настоящем описании в контексте отдельных вариантов осуществления, можно также реализовать в комбинации в одном варианте осуществления. И, наоборот, различные признаки, которые описаны в контексте одного варианта осуществления, можно также реализовать в нескольких вариантах осуществления по отдельности или в любой подходящей субкомбинации. Кроме того, хотя в вышеприведенном описании признаки могут быть представлены как функционирующие в некоторых комбинациях и даже первоначально заявлены как таковые, однако по меньшей мере один признак из заявленной комбинации может быть, в некоторых случаях, исключен из комбинации, и заявленная комбинация может быть назначена субкомбинации или варианту субкомбинации.
Изобретение относится к медицинской технике, а именно к офтальмологическим системам. Система содержит стыковочный блок, выполненный с возможностью совмещения офтальмологической системы и глаза, систему формирования изображений, контроллер формирования изображений, содержащий процессор, контроллер локальной памяти, выполненный с возможностью управлять передачей вычисленных данных сканирования из процессора в буфер данных, и выходной цифроаналоговый преобразователь, связанный с буфером данных. Буфер данных выполнен с возможностью сохранения данных сканирования и вывода данных сканирования. Система выполнена с возможностью совмещения стыковочного блока с внутренней структурой глаза в зависимости от сформированного изображения и стыковки стыковочного блока с глазом. Использование изобретения обеспечивает повышение точности управляемого соединения с офтальмологическим целевым объектом. 23 з.п. ф-лы, 12 ил.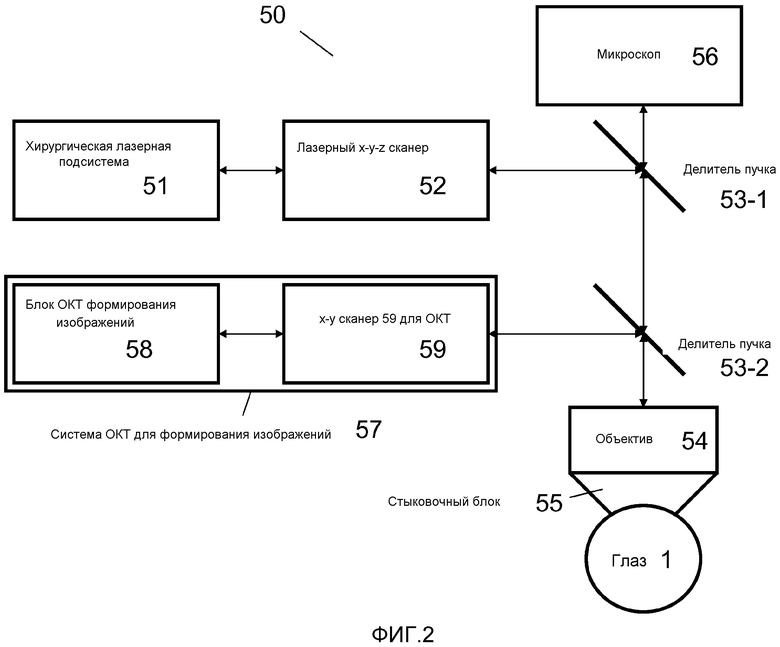
1. Офтальмологическая система, содержащая:
стыковочный блок, выполненный с возможностью совмещения офтальмологической системы и глаза;
систему формирования изображений, выполненную с возможностью формирования изображения внутренней структуры глаза;
контроллер формирования изображений, содержащий
процессор, выполненный с возможностью вычисления данных сканирования для паттерна сканирования;
контроллер локальной памяти, выполненный с возможностью управлять передачей вычисленных данных сканирования из процессора в буфер данных, при этом
буфер данных выполнен с возможностью сохранения данных сканирования и вывода данных сканирования; и
выходной цифроаналоговый преобразователь, связанный с буфером данных, выполненный с возможностью преобразования выбранных данных сканирования в аналоговые сигналы сканировании и вывода сигналов сканирования;
причем офтальмологическая система выполнена с возможностью совмещения стыковочного блока с внутренней структурой глаза в зависимости от сформированного изображения и
стыковки стыковочного блока с глазом.
2. Офтальмологическая система по п. 1, содержащая первую систему формирования изображений, выполненную с возможностью совмещения целевого паттерна офтальмологической системы с характерным элементом глаза.
3. Офтальмологическая система по п. 2, в которой:
первая система формирования изображений содержит что-то одно из микроскопа или видеомикроскопа;
целевой паттерн офтальмологической системы содержит, по меньшей мере, что-то одно из центра контактной линзы, центра стыковочного блока, стыковочного кольца или стыковочного перекрестья и
характерный элемент глаза является, по меньшей мере, каким-то одним из
центра области радужной оболочки, зрачка, роговицы, лимба или хрусталика или
кольцевого образования, связанного с областью радужной оболочки, зрачка, роговицы, лимба или хрусталика.
4. Офтальмологическая система по п. 1, содержащая:
вторую систему формирования изображений, выполненную с возможностью формирования изображения, при этом
вторая система формирования изображений является какой-то одной из системы формирования изображений методом оптической когерентной томографии и системы формирования изображений, выполненной с возможностью формирования изображений внутренней структуры глаза.
5. Офтальмологическая система по п. 1, при этом:
офтальмологическая система выполнена с возможностью
способствовать выделению позиционной информации, касающейся внутренней структуры глаза, из сформированного изображения и
способствовать регулировке положения, по меньшей мере, чего-то одного из глаза или стыковочного блока в зависимости от выделенной позиционной информации.
6. Офтальмологическая система по п. 1, при этом:
офтальмологическая система выполнена с возможностью
способствовать выделению ориентационной информации, касающейся внутренней структуры глаза, из сформированного изображения и
способствовать регулировке ориентации, по меньшей мере, чего-то одного из глаза или стыковочного блока в зависимости от выделенной ориентационной информации.
7. Офтальмологическая система по п. 1, в которой процессор выполнен с возможностью реализации паттерна сканирования, который содержит, по меньшей мере, какой-то один из линейного паттерна, кольцевого паттерна, овального паттерна, замкнутого паттерна, дугового паттерна, растрового паттерна, двухкоординатного (x-y) паттерна, перекрестного паттерна, звездообразного паттерна, спирального паттерна и паттерна с удаленными точками.
8. Офтальмологическая система по п. 1, в которой процессор выполнен с возможностью вставки синхронизирующих сигналов в данные сканирования посредством процессора.
9. Офтальмологическая система по п. 1, в которой процессор выполнен с возможностью вычисления данных приведения в расчетную точку, соответствующих паттерну приведения в расчетную точку, соединяющему начальную точку паттерна сканирования с предварительно установленной точкой.
10. Офтальмологическая система по п. 1, содержащая:
память процессора, выполненную с возможностью сохранения данных сканирования; и
контроллер памяти, выполненный с возможностью управления передачей сохраненных данных сканирования из памяти процессора в буфер данных.
11. Офтальмологическая система по п. 10, в которой:
контроллер памяти содержит механизм прямого доступа к памяти и
буфер данных содержит память обратного магазинного типа.
12. Офтальмологическая система по п. 1, в которой буфер данных выполнен с возможностью вывода данных сканирования в модуль вывода в режиме высокоскоростной передачи данных.
13. Офтальмологическая система по п. 1, в которой буфер данных выполнен с возможностью вывода данных сканирования из буфера данных.
14. Офтальмологическая система по п. 1, в которой:
буфер данных выполнен с возможностью вывода данных сканирования параллельно с выполнением процессором, по меньшей мере, чего-то одного из
обработки изображения,
вычисления данных сканирования, соответствующих паттерну сканирования, или
выполнения функции управления.
15. Офтальмологическая система по п. 1, в которой буфер данных выполнен с возможностью приема посредством модуля вывода данных сканирования с временным дрожанием данных сканирования менее 40 мкс.
16. Офтальмологическая система по п. 1, в которой выходной цифроаналоговый преобразователь выполнен с возможностью преобразования данных сканирования в аналоговые сигналы сканирования.
17. Офтальмологическая система по п. 1, дополнительно содержащая:
контроллер сканирования и синхронизатор формирования изображений, соединенные с выходным цифроаналоговым преобразователем, выполненные с возможностью приема сигналов сканирования, выведенных посредством выходного цифроаналогового преобразователя, при этом сигналы сканирования содержат синхронизирующие сигналы;
контроллер сканирования выполнен с возможностью повторной регулировки по меньшей мере одного сканера в соответствии с сигналами сканирования, чтобы сканировать визуализирующим пучком; и
синхронизатор формирования изображений выполнен с возможностью повторной синхронизации камеры для формирования изображений в соответствии с синхронизирующими сигналами.
18. Офтальмологическая система по п. 17, в которой:
контроллер сканирования содержит по меньшей мере один гальванометрический контроллер и
синхронизатор формирования изображений содержит по меньшей мере один контроллер камеры для формирования офтальмологических когерентных изображений.
19. Офтальмологическая система по п. 1, дополнительно содержащая устройство записи изображений, присоединенное к системе формирования изображений, причем время интегрирования устройства записи изображения задает быстродействие системы формирования изображений.
20. Офтальмологическая система по п. 1, в которой сигналы сканирования имеют частоты вывода сигналов сканирования в пределах одного из следующих диапазонов:
1 Гц-1 МГц, 100 Гц-1 МГц или 1 кГц-100 кГц.
21. Офтальмологическая система по п. 1, в которой выходной цифроаналоговый преобразователь выполнен с возможностью регулировки выходной скорости вывода сигналов сканирования.
22. Офтальмологическая система по п. 1, в которой стыковочный блок является перемещаемым посредством перемещения гентри или шарнирной консоли.
23. Офтальмологическая система по п. 1, при этом:
офтальмологическая система выполнена с возможностью
измерения расстояния между реперной точкой стыковочного блока и внешним слоем глаза и
опускания стыковочного блока в соответствии с измеренным расстоянием.
24. Офтальмологическая система по п. 23, в которой реперная точка является регулируемой.
| US 2006187462 A1, 24.08.2006 | |||
| US 6379005 B1, 30.04.2002 | |||
| US 2012110377 A1, 03.05.2012 | |||
| US 4465348 A, 14.08.1984 | |||
| US 5255025 A, 19.10.1993. |

