Ссылки на родственные заявки
Данная заявка испрашивает приоритет и все преимущества американской заявки №61/408,884, поданной 1 ноября 2010 года под названием "Нацеливание на опознавательные точки ортопедических устройств", и американской заявки №61/546,052, поданной 11 октября 2011 года под названием "Нацеливание на опознавательные точки ортопедических устройств", содержание которых во всей полноте включено в данный документ путем ссылки.
Область техники, к которой относится изобретение
Данное изобретение относится к нацеливанию на опознавательные точки ортопедических устройств.
Уровень техники
Ортопедические устройства применяют при лечении многих травм или заболеваний. Например, лечение многих переломов костей предусматривает стабилизацию выбранных частей и/или отломков кости с помощью имплантируемой ортопедической пластины и/или имплантируемого ортопедического стержня, а также костных винтов или штифтов. Или, например, суставы могут быть соединены или зафиксированы каким-либо иным образом с помощью пластин и/или стержней, закрепленных винтами или штифтами.
В некоторых случаях необходимо или целесообразно производить нацеливание на скрытую опознавательную точку ортопедического имплантата. Например, некоторые процедуры предусматривают установку костных винтов или штифтов через выбранные отверстия имплантированного ортопедического устройства. В некоторых случаях такое нацеливание можно осуществить с помощью рентгенографии. К сожалению, по разным причинам рентгенография может оказаться нежелательной. Например, воздействие излучения, используемого в процессе формирования изображений, может быть вредным как для пациента, так и для лечащего персонала или ассистентов. Кроме того, рентгенография может оказаться дорогостоящей и долгой, а также неточной или не настолько точной, как требуется.
В последнее время нацеливание на ортопедические имплантаты для определения относительного положения и ориентации инструмента и элемента имплантированного ортопедического устройства осуществляют при помощи электромагнитных методов. Например, нацеливание на дистальные отверстия с блокировкой в имплантированном интрамедуллярном стержне с целью сверления и крепления при помощи винта с блокировкой можно производить с помощью электромагнитной системы нацеливания, например, системы дистального нацеливания TRIGEN ® SURESHOT®, предлагаемой компанией SMITH & NEPHEW®.
Раскрытие изобретения
В одном из вариантов осуществления изобретения, заявляемое устройство содержит датчик положения и корпус. При этом корпус выполнен с возможностью зацепления с сопрягаемым конструктивным элементом, который присоединен к ортопедическому имплантату или сформирован на нем. Когда корпус введен в зацепление с сопрягаемым конструктивным элементом, датчик положения позволяет определить положение опознавательной точки ортопедического имплантата.
В другом варианте осуществления, заявляемое устройство для нацеливания на опознавательную точку ортопедического имплантата содержит корпус, выполненный с возможностью зацепления с сопрягаемым конструктивным элементом для крепления корпуса к ортопедическому имплантату. Кроме того, указанное устройство содержит электромагнитный датчик, расположенный в корпусе в известном положении, причем когда корпус введен в зацепление с сопрягаемым конструктивным элементом, положение датчика относительно опознавательной точки ортопедического имплантата известно по меньшей мере для пяти степеней свободы.
Реализации могут содержать один или более следующих признаков. Например, корпус имеет одну по существу цилиндрическую внешнюю поверхность, содержащую захват и шариковый фиксатор для неподвижного крепления корпуса к имплантату. Кроме того, корпус может содержать расщепленный конец, выполненный с возможностью расширения для входа в зацепление с сопрягаемым конструктивным элементом и неподвижного крепления корпуса к имплантату. Корпус имеет внешнюю поверхность, содержащую сжимаемую деталь, выполненную с возможностью ввода в зацепление с канавкой для неподвижного крепления корпуса к имплантату. Корпус содержит коническую внешнюю поверхность, выполненную с возможностью ввода в зацепление с гнездом для неподвижного крепления корпуса к имплантату. Корпус задает центральную продольную ось, причем корпус изогнут вокруг указанной центральной продольной оси корпуса. Сопрягаемый конструктивный элемент содержит многоугольную внешнюю часть, а корпус содержит комплементарную многоугольную часть для сопряжения с указанной многоугольной внешней частью.
В другом варранте осуществления изобретения, способ нацеливания на опознавательную точку ортопедического устройства включает в себя определение местоположения первой опознавательной точки ортопедического устройства с применением устройства идентификации опознавательной точки и первого датчика электромагнитного поля. Устройство идентификации опознавательной точки содержит генератор электромагнитного поля, а первый датчик электромагнитного поля при определении местоположения первой опознавательной точки находится в зоне действия генератора электромагнитного поля. Заявляемый способ включает в себя расположение второго датчика электромагнитного поля в зоне действия и определение местоположения второй опознавательной точки ортопедического устройства с применением устройства идентификации опознавательных точек и второго датчика электромагнитного поля.
Реализации могут содержать один или более следующих признаков. Например, при определении местоположения второй опознавательной точки, первый датчик электромагнитного поля находится вне зоны действия генератора электромагнитного поля. Первая опознавательная точка представляет собой отверстие. Ортопедическое устройство представляет собой костную пластину. Прикрепление второго датчика электромагнитного поля предусматривает получение доступа к отверстию и прикрепление второго датчика электромагнитного поля к ортопедическому устройству посредством отверстия. Получение доступа к отверстию происходит при имплантации ортопедического устройства в тело пациента. Отверстие представляет собой резьбовое отверстие, причем прикрепление второго датчика электромагнитного поля предусматривает ввод сверлильной втулки в зацепление с резьбовым отверстием и прикрепление второго датчика электромагнитного поля к сверлильной втулке. Кроме того, способ включает в себя расположение первого датчика электромагнитного поля в известном положении относительно первой опознавательной точки.
Кроме того, способ включает в себя калибровку первого датчика электромагнитного поля. Калибровка первого датчика электромагнитного поля предусматривает применение по меньшей мере одного из следующих устройств: второго датчика электромагнитного поля и генератора электромагнитного поля. Кроме того, способ включает в себя обеспечение корпуса для установки первого датчика электромагнитного поля, причем указанный корпус содержит по меньшей мере два сопрягаемых конструктивных элемента, предназначенные для ввода в зацепление с выбранными участками на имплантате. Кроме того, способ включает в себя обеспечение корпуса для установки первого датчика электромагнитного поля, причем указанный корпус содержит элемент, сопрягаемый с предварительно выбранным элементом на имплантате. Кроме того, способ включает в себя калибровку второго датчика электромагнитного поля. Калибровка второго датчика электромагнитного поля предусматривает калибровку сигнала, принятого от второго датчика электромагнитного поля, на основе сигнала, принятого от первого датчика электромагнитного поля, когда первый и второй датчики электромагнитного поля расположены в зоне действия генератора электромагнитного поля. Кроме того, способ включает в себя смену глобальной системы координат системы нацеливания с положения первого датчика электромагнитного поля на положение второго датчика электромагнитного поля.
В другом варианте осуществления изобретения, способ нацеливания на опознавательную точку ортопедического имплантата включает в себя крепление датчика электромагнитного поля в первом положении, причем положение датчика электромагнитного поля относительно первой опознавательной точки ортопедического имплантата известно для нескольких степеней свободы. Способ включает в себя определение положения датчика электромагнитного поля для неизвестной степени свободы и калибровку датчика электромагнитного поля с применением по меньшей мере одного из следующих устройств: генератора электромагнитного поля и датчика электромагнитного поля. Способ также включает в себя нацеливание на вторую опознавательную точку ортопедического имплантата с применением калиброванного датчика электромагнитного поля и генератора электромагнитного поля.
Реализации могут содержать один или более следующих признаков. Например, заявляемый способ дополнительно предусматривает имплантацию ортопедического имплантата в тело пациента после калибровки датчика электромагнитного поля. Способ включает в себя имплантацию ортопедического имплантата в тело пациента перед калибровкой датчика электромагнитного поля. Кроме того, способ предусматривает крепление генератора электромагнитного поля к ортопедическому имплантату в известном положении относительно третьей опознавательной точки ортопедического имплантата, причем датчик электромагнитного поля калибруют тогда, когда генератор электромагнитного поля прикреплен к ортопедическому имплантату. Вторая опознавательная точка и третья опознавательная точка представляют собой одну и ту же опознавательную точку. Кроме того, способ включает в себя крепление второго датчика электромагнитного поля к ортопедическому имплантату в известном положении относительно третьей опознавательной точки ортопедического имплантата, причем датчик электромагнитного поля калибруют тогда, когда второй датчик электромагнитного поля прикреплен к ортопедическому имплантату. Вторая опознавательная точка и третья опознавательная точка представляют собой одну и ту же опознавательную точку. Кроме того, способ предусматривает крепление датчика электромагнитного поля к ортопедическому имплантату, прикрепление сверлильной втулки к отверстию ортопедического имплантата и прикрепление корпуса к сверлильной втулке, причем к корпусу прикреплен датчик электромагнитного поля. Положение датчика электромагнитного поля относительно отверстия ортопедического имплантата известно для трех поступательных степеней свободы и двух вращательных степеней свободы. Калибровка датчика электромагнитного поля включает в себя определение углового положения датчика электромагнитного поля для третьей вращательной степени свободы. Крепление датчика электромагнитного поля к ортопедическому имплантату предусматривает прикрепление к ортопедическому имплантату установочной рукоятки.
В другом варианте осуществления изобретения, способ подтверждения приемлемого позиционирования инструмента относительно ортопедического стабилизирующего устройства включает в себя прием сигнала от датчика, указывающего на положение инструмента относительно опознавательной точки ортопедического стабилизирующего устройства. Способ предусматривает определение положения инструмента относительно опознавательной точки и сравнение положения инструмента с приемлемым диапазоном положений крепежного элемента относительно опознавательной точки. Способ предусматривает определение того, что положение инструмента относительно опознавательной точки соответствует приемлемому положению в диапазоне положений крепежного элемента относительно опознавательной точки, и вывод на графический пользовательский интерфейс индикации о том, что положение инструмента относительно опознавательной точки приемлемо.
Реализации могут содержать один или более следующих признаков. Например, указанный этап вывода предусматривает вывод одного или более элементов, выбранных из группы следующих элементов: элементы, представляющие угол сверла относительно центральной сквозной оси отверстия с изменяемым углом; один или более элементов, представляющих приемлемые положения инструмента относительно опознавательной точки; один или более элементов, представляющих неприемлемые положения инструмента относительно опознавательной точки; числовое представление угла сверла относительно центральной сквозной оси отверстия с изменяемым углом; числовое представление максимального приемлемого угла ввода крепежного элемента; элемент, указывающий на приемлемость текущего положения инструмента; элемент, указывающий на неприемлемость текущего положения инструмента. При этом, ортопедическое стабилизирующее устройство содержит ортопедическую костную пластину, и опознавательная точка представляет собой отверстие с изменяемым углом в ортопедической костной пластине, а крепежный элемент представляет собой костный винт, выполненный с возможностью ввода под изменяемым углом в отверстие с изменяемым углом. Опознавательная точка представляет собой отверстие с изменяемым углом и блокировкой. Инструмент содержит сверло, причем этап сравнения предусматривает сравнение угла сверла относительно центральной сквозной оси отверстия с изменяемым углом и приемлемого угла ввода крепежного элемента в отверстие с изменяемым углом. Этап вывода предусматривает вывод одного или более элементов, выбранных из группы следующих элементов: элементы, представляющие угол сверла относительно центральной сквозной оси отверстия с изменяемым углом; графическое представление приемлемой конической области винта с изменяемым углом или с изменяемым углом и блокировкой; один или более элементов, представляющих приемлемые положения инструмента относительно опознавательной точки; один или более элементов, представляющих неприемлемые положения инструмента относительно опознавательной точки; числовое представление угла сверла относительно центральной сквозной оси отверстия с изменяемым углом; числовое представление максимального приемлемого угла ввода крепежного элемента; элемент, указывающий на приемлемость текущего положения инструмента; элемент, указывающий на неприемлемость текущего положения инструмента.
В другом варианте осуществления изобретения, устройство идентификации опознавательной точки для применения при нацеливании на опознавательную точку ортопедического имплантата содержит корпус и по меньшей мере один расположенный в корпусе генератор электромагнитного поля. Генератор электромагнитного поля выполнен с возможностью создания зоны действия. Устройство идентификации опознавательной точки запрограммировано для работы по меньшей мере в первом режиме и во втором режиме, причем зона действия при работе в первом режиме отличается от зоны действия при работе во втором режиме.
В еще одном варианте осуществления изобретения, способ обеспечения данных отслеживания предусматривает отслеживание положения инструмента относительно ортопедического имплантата, определение положения траектории, которую задает инструмент относительно ортопедического имплантата и отображение на пользовательском интерфейсе положения траектории, заданной инструментом относительно ортопедического имплантата.
Реализации могут содержать один или более следующих признаков. Например, способ включает в себя идентификацию одного или более трансфиксационных элементов, показанных для применения с ортопедическим имплантатом вдоль указанной траектории, и предоставление информации, идентифицирующей один или более показанных для применения трансфиксационных элементов. Способ включает идентификацию одного или более типов компонентов, показанных для применения с ортопедическим имплантатом вдоль траектории, заданной инструментом, и предоставление информации, идентифицирующей один или более показанных для применения типов компонентов. Способ предусматривает определение глубины, просверленной инструментом относительно ортопедического имплантата, и индикацию указанной глубины на пользовательском интерфейсе. Определение глубины, просверленной инструментом относительно ортопедического имплантата, включает в себя определение положения дрели относительно сверлильного кондуктора. Определение положения дрели относительно сверлильного кондуктора предусматривает определение относительного положения первого реперной метки, соединенной с дрелью, и второй реперной метки, соединенной со сверлильным кондуктором. Способ включает в себя отслеживание положения и глубины, просверленной инструментом относительно ортопедического имплантата, и хранение информации о положении и глубине, просверленной инструментом. Способ предусматривает хранение данных о положении просверленного отверстия или вставленного винта, определение того, что траектория инструмента пересекает просверленное отверстие или вставленный винт, и обеспечение индикации указанного пересечения в ответ на определение того, что траектории инструмента пересекает просверленное отверстие или вставленный винт. Способ включает в себя определение максимального расстояния, на которое трансфиксационный элемент может проходить вдоль указанной траектории, не сталкиваясь с просверленным отверстием или вставленным винтом, и индикацию указанного максимального расстояния. Способ включает в себя определение факта неточного отслеживания системой слежения реперной метки, соединенной с инструментом, и индикацию на пользовательском интерфейсе факта неточного отслеживания инструмента следящей системой. Способ предусматривает обеспечение одного или более индикаторов конфигурации, которые идентифицируют инструменты или имплантаты, отслеживаемые системой слежения. Отслеживание положения инструмента относительно ортопедического имплантата включает в себя отслеживание относительного положения первого оптического опорного элемента, соединенного с инструментом, и второго оптического опорного элемента, соединенного с ортопедическим имплантатом. Отслеживание положения инструмента относительно ортопедического имплантата включает в себя отслеживание относительного положения первого датчика электромагнитного поля, соединенного с инструментом, и второго датчика электромагнитного поля, соединенного с ортопедическим имплантатом.
Далее одна или более реализаций подробно описаны со ссылками на прилагаемые чертежи. Другие признаки, задачи и преимущества изобретения очевидны из описания, чертежей и формулы изобретения.
Краткое описание чертежей
На фиг.1 в изометрии показано устройство идентификации опознавательных точек.
На фиг.2 в изометрии показан блок датчика и сверлильная втулка.
На фиг.3-6 в изометрии показана система нацеливания на опознавательные точки.
На фиг.7 в изометрии показана система нацеливания на опознавательные точки.
На фиг.8А-11А показаны сбоку корпуса блоков датчиков.
На фиг.11В в разрезе показана сверлильная втулка.
На фиг.12А в разрезе показана сверлильная втулка и крепежная деталь.
На фиг.12В показан сверху крепежная деталь с фиг.12А.
На фиг.13 и 14 в изометрии показаны корпуса блоков датчиков.
На фиг.15 представляет собой перспективное изображение системы для нацеливания на опознавательные точки.
На фиг.16А в изометрии показан кондуктор для системы с фиг.15.
На фиг.16В в изометрии показано крепление системы с фиг.15.
На фиг.16С в изометрии показана дрель для системы с фиг.15.
На фиг.17 и 18 показаны примеры пользовательских интерфейсов блока управления системы с фиг.15.
Осуществление изобретения
Система для нацеливания на опознавательные точки ортопедических имплантатов или других ортопедических устройств содержит устройство идентификации опознавательных точек, предназначенное для крепления к ортопедическому инструменту и содержащее генератор электромагнитного поля, пригодный для генерации электромагнитного поля с известными свойствами. Указанная система также содержит один или несколько электромагнитных датчиков и/или генератор (ов) поля, предназначенных для крепления к ортопедическому имплантату или другому ортопедическому устройству, на который осуществляют нацеливание, а также блок управления, предназначенный для управления генератором электромагнитного поля, приема выходных сигналов от датчика (датчиков) и вывода на дисплей взаимного расположения ортопедического устройства и устройства идентификации опознавательных точек. Устройство идентификации опознавательных точек, датчики и блок управления, например, имеют характеристики, описанные в документах № WO 2008/106593 и WO 2009/108214, а также в американских документах №12/758747 и 12/768689. Содержание всех указанных документов в полном объеме включено в данную заявку путем ссылки.
Как показано на фиг.1-3 устройство 10 идентификации опознавательных точек содержит генератор 10а электромагнитного поля, создающий электромагнитное поле с известными характеристиками. Генератор 10а электромагнитного поля расположен в корпусе 13 устройства 10 идентификации опознавательных точек. Генератор 10а электромагнитного поля содержит одну или несколько катушек или других компонентов, создающих электромагнитные поля. Сгенерированные электромагнитные поля могут быть обнаружены одним или несколькими электромагнитными датчиками. На основе выходных данных этих датчиков может быть определено положение (в том числе местоположение и ориентация) датчиков относительно устройства 10 идентификации опознавательных точек.
Рабочая область устройства 10 идентификации опознавательных точек представляет собой трехмерную область, расположенную вокруг устройства 10 идентификации опознавательных точек и называемую зоной действия устройства 10 идентификации опознавательных точек. Размер и форма зоны действия зависят от характеристик электромагнитных полей, создаваемых генератором 10а электромагнитного поля, и в зависимости от требуемой точности нацеливания они могут быть изменены в сторону увеличения или уменьшения. Например, при нацеливании на отверстие в интрамедуллярном стержне с учетом того факта, что это отверстие скрыто внутри кости, может потребоваться высокая точность. В некоторых реализациях, в результате увеличения степени точности, зона действия уменьшается. При нацеливании на отверстие в костной пластине очень высокая степень точности может не потребоваться из-за того, что это отверстие находится в костной пластине, расположенной вне кости, где это отверстие может быть открыто для визуального подтверждения его расположения. В результате, зона действия может быть значительно больше, чем при нацеливании на интрамедуллярный стержень. Благодаря большей зоне действия возможно нацеливание на большее число расположенных в этой зоне отверстий. В некоторых реализациях, зона действия представляет собой зону, окружающую устройство 10 идентификации опознавательных точек. Например, устройство 10 идентификации опознавательных точек может быть установлено по существу в центре зоны действия, а зона действия в некоторых реализациях, например, при нацеливании на отверстия в костной пластине, может составлять приблизительно 50 см или более по ширине и приблизительно 40 см или более по глубине и располагаться на расстоянии приблизительно 5 см от устройства 10 идентификации опознавательных точек. Например, длина сверлильной втулки должна составлять более 5 см, чтобы обеспечить ее размещение внутри зоны действия.
Блок 20 датчика электромагнитного поля, расположенный в зоне действия устройства 10 идентификации опознавательных точек, может генерировать выходные сигналы, указывающие на напряженность электромагнитного поля, сгенерированного устройством 10 идентификации опознавательных точек. Выходные сигналы могут быть использованы для точного определения местоположения и ориентации устройства 10 идентификации опознавательных точек относительно датчика. С другой стороны, датчик, расположенный вне зоны действия устройства 10 идентификации опознавательных точек, по существу не получает или не может получить от устройства 10 идентификации опознавательных точек электромагнитную энергию, достаточную для генерации выходных сигналов, которые могут быть использованы для точного определения положения устройство 10 идентификации опознавательных точек. Форма и размер зоны действия устройства 10 идентификации опознавательных точек частично зависит от конфигурации генератора 10а электромагнитного поля, определенных характеристик работы генератора 10а электромагнитного поля, например, характеристик управляющего сигнала, и других факторов.
В некоторых реализациях, устройство 10 идентификации опознавательных точек запрограммировано на работу в различных режимах и управляется при помощи интегральной схемы, установленной на электронной плате внутри устройства 10 идентификации опознавательных точек. Например, в первом рабочем режиме устройство 10 идентификации создает первую зону действия. Во втором рабочем режиме устройство 10 идентификации создает зону действия, характеристики которой отличаются от характеристик зоны действия, создаваемой в первом режиме. Например, зона действия, создаваемая во втором режиме, может быть больше или меньше зоны действия, создаваемой в первом режиме. Также возможны дополнительные режимы или вариации между режимами.
Устройство 10 идентификации опознавательных точек может иметь проводную или беспроводную связь с блоком 40 управления (фиг.3), чтобы принимать сигналы мощности и управляющие сигналы для управления работой генератора 10а электромагнитного поля. Например, устройство 10 идентификации опознавательных точек может содержать кабель 11, обеспечивающий соединение с блоком 40 управления.
Оператор, например, хирург, может взяться за корпус 13 устройства 10 идентификации опознавательных точек, чтобы расположить устройство 10 идентификации опознавательных точек относительно пациента, ортопедического устройства и/или датчика, например, блока 20 датчика электромагнитного поля (фиг.2). Кроме того, устройство 10 идентификации опознавательных точек может содержать соединительную деталь 12, к которой могут быть присоединены инструменты и другие приспособления. С помощью соединительной детали 12 к устройству 10 идентификации опознавательных точек можно прикреплять инструменты и другие устройства или направлять их. Например, в соединительную деталь 12 может быть вставлено крепление 14 сверлильного кондуктора, соединенное со сверлильным кондуктором 16. Устройство 10 идентификации опознавательных точек может быть использовано для установки сверлильного кондуктора 16 таким образом, что сверло, вставленное через сверлильный кондуктор 16, направлено в положение, требуемое или подходящее для соответствующей медицинской процедуры.
Как показано на фиг.2, блок 20 датчика электромагнитного поля содержит датчик 22 электромагнитного поля, провод 24 датчика и корпус 28. Датчик 22 электромагнитного поля, например, может представлять собой индуктивный датчик, предназначенный для реагирования на электромагнитное поле, созданное устройством 10 идентификации опознавательных точек, посредством выдачи одного или более наведенных электрических токов. Датчик 22 может быть выполнен с возможностью выдавать сигналы, позволяющие определять положение устройства 10 идентификации опознавательных точек. Например, датчик 22 может содержать одну или более катушек индуктивности, каждая из которых индуцирует электрический ток. Выходные сигналы датчика 22 позволяют определить местоположение и ориентацию датчика 22 в отношении вплоть до шести степеней свободы, например, по трем осям линейного перемещения, обычно называемым X, Y, и Z, и трем угловым ориентациям, обычно называемым тангаж, рыскание и крен, которые заданы вращением вокруг указанных трех осей линейного перемещения.
Датчик 22 содержит соединение для передачи выходных сигналов или данных, относящихся к этим сигналам. Например, провод 24 датчика обеспечивает проводное соединение для передачи выходных сигналов блока 20 датчика. Провод 24 датчика может передавать сигналы, созданные датчиком 22 в ответ на электромагнитные поля. В некоторых реализациях соединение может содержать беспроводной передатчик. Кроме того, провод 24 датчика может содержать более одного соединения, и в дополнение к передаче сигналов или данных провод 24 датчика может передавать сигналы мощности и управляющие сигналы, и возможна двусторонняя связь. Например, в запоминающем устройстве блока 20 датчика может храниться информация о калибровке датчика 22.
Датчик 22 прикреплен к корпусу 28 для сохранения положения датчика 22 относительно корпуса 28. Например, датчик 22 может быть неподвижно прикреплен к корпусу 28 в известном месте корпуса 28. Благодаря сохранению положения датчика 22 относительно корпуса 28, положение датчика 22 относительно опознавательной точки ортопедического устройства может быть известно по меньшей мере для пяти степеней свободы, когда корпус 28 прикреплен к ортопедическому устройству напрямую или посредством другого элемента. При этом датчик 22 соединен с корпусом 28 в таком месте корпуса 28, которое можно расположить вблизи опознавательной точки, например, на дистальном конце 26 корпуса 28, так что при попытке нацеливания на опознавательную точку датчик 22, вероятно, будет расположен в зоне действия устройства 10 идентификации опознавательных точек.
Корпус 28 блока 20 датчика предназначен для ввода в зацепление с сопрягаемым конструктивным элементом ортопедического устройства или конструктивным элементом, присоединенным к ортопедическому устройству, например, со сверлильной втулкой 18, для крепления блока 20 датчика к ортопедическому устройству, например, к ортопедическому имплантату 30 (фиг.3). Например, корпус 28 может быть соединен с сопрягаемым конструктивным элементом для предотвращения отсоединения корпуса 28 от ортопедического имплантата 30 или изменения ориентации датчика 22 при использовании датчика 22.
Сверлильная втулка 18 может быть выполнена с возможностью приема корпуса 28 датчика таким образом, что когда сверлильная втулка 18 прикреплена к ортопедическому имплантату 30, корпус 28 датчика и датчик 22 неподвижно прикреплены к ортопедическому имплантату 30. Блок 20 датчика может быть прикреплен к сверлильной втулке 18, например, посредством ввода в сквозное отверстие 19 сверлильной втулки 18. Сверлильная втулка 18 может быть прикреплена к ортопедическому имплантату 30 посредством зацепления резьбового конца (на чертежах не показан) сверлильной втулки 18 с резьбовым отверстием 32 ортопедического имплантата. В некоторых реализациях, например, когда резьбовое отверстие 32 или отверстие без резьбы не зафиксировано, это означает, что в отверстии или вблизи него отсутствуют элементы для повторной и единообразной фиксации местоположения и ориентации датчика 22 относительно опорной точки на ортопедическом имплантате. Например, при прикреплении датчика 22 к ортопедическому имплантату 30 датчик 22 может быть закреплен относительно ортопедического имплантата 30 в положении, которое известно в отношении пяти степеней свободы. В частности, может быть неизвестно угловое положение датчика 22, из-за резьбового зацепления сверлильной втулки 18 с ортопедическим имплантатом 30 и возможного вращения корпуса 28 в сквозном отверстии 19. Если положение датчика 22 неизвестно в отношении одной или более степеней свободы, он может быть откалиброван перед нацеливанием на одну или более опознавательных точек ортопедического устройства 30.
Как показано на фиг.3, система 300 нацеливания содержит блок 40 управления, первый блок 20а датчика, второй блок 20b датчика (или второй блок генератора поля для применения при калибровке первого блока 20а датчика) и устройство 10 идентификации опознавательных точек. Система 300 может быть использована для нацеливания на опознавательные точки ортопедического устройства, например, ортопедического имплантата или ортопедического стабилизирующего конструктивного элемента 30. Ортопедический имплантат 30, изображенный на фиг.3, представляет собой костную пластину, которая может быть прикреплена к костным отломкам, чтобы обеспечить совмещение и опору для частей кости в процессе срастания. В другом варианте осуществления изобретения, нацеливание на ортопедические устройства может быть произведено с помощью системы 300, содержащей интрамедуллярные стержни, костные пластины, компоненты протеза сустава и устройства внешней фиксации.
Ортопедический имплантат 30 содержит группу опознавательных точек. Опознавательная точка может представлять собой, например, конструктивный элемент, полость, выпуклость, канал, захват, фланец, канавку, деталь, участок, уступ, отверстие, просверленное отверстие, впадину, углубление, проток, промежуток, выступ, проем, проход, щель, вырез или паз. Например, ортопедический имплантат 30 в качестве опознавательных точек содержит различные отверстия 32. Отверстия 32 могут представлять собой, например, отверстия с изменяемым углом, отверстия с изменяемым углом и блокировкой или отверстия с заданным углом и блокировкой.
Точное местоположение и ориентация опознавательных точек может потребоваться во время и после процесса имплантации для точной установки сверлильной втулки, стержня, винта или другого устройства. Однако опознавательные точки могут быть закрыты тканью, и определить их местоположение может быть трудно. Кроме того, применение кондукторов или других средств для задания угла инструмента относительно опознавательной точки может быть сложным и долгим, и они могут не обеспечить требуемой степени точности. Устройство 10 идентификации опознавательных точек может быть использовано для нацеливания на опознавательные точки или, другими словами, для определения положения опознавательных точек, даже если опознавательные точки покрыты тканью. Устройство 10 идентификации опознавательных точек позволяет определить положение инструмента, например, дрели или крепежного элемента относительно опознавательной точки, даже если указанная опознавательная точка обнажена.
Блок 40 управления системы 300 управляет работой устройства 10 идентификации опознавательных точек и принимает входные сигналы от одного или нескольких блоков 20а, 20b датчика. Кроме того, блок 40 управления содержит пользовательский интерфейс 42, предоставляющий информацию оператору системы 300. Блок 40 управления содержит процессор, предназначенный для определения местоположения и ориентации датчика 22 относительно опознавательных точек ортопедического имплантата 30 на основе входных сигналов, получаемых от блоков 20а, 20b датчика, и информации, относящейся к сигналу управления генератором 10а электромагнитного поля. Указанное определение положения осуществляют на основе известного взаимного расположения между блоками 20а, 20b датчика и опознавательными точками и определенного положения устройства 10 идентификации опознавательных точек относительно блоков 20а, 20b датчика.
В некоторых реализациях, для нацеливания на некоторые опознавательные точки, например, на опознавательные точки, находящиеся на ограниченном расстоянии от блока 20а датчика, когда он прикреплен к ортопедическому имплантату 30, требуется только один блок датчика, например, блок 20а датчика. Как сказано выше, перед нацеливанием на опознавательные точки может потребоваться калибровка блока 20а датчика, например, если крепление блока 20а датчика к ортопедическому имплантату 30 приводит к тому, что положение датчика 22 относительно ортопедического имплантата 30 неизвестно по меньшей мере для одной степени свободы. В некоторых реализациях, первый блок 20а датчика системы 300 идентификации может быть откалиброван перед имплантацией ортопедического 30 имплантата. Например, неизвестную ориентацию датчика 22 относительно имплантата 30 можно определить перед имплантацией ортопедического устройства посредством калибровки первого блока 20а датчика с помощью второго блока датчика или генератора поля. Описанную ниже калибровку можно также произвести во время процесса имплантации.
Чтобы откалибровать блок 20а датчика по неизвестной шестой степени свободы, первый блок 20а датчика неподвижно прикрепляют к ортопедическому имплантату 30. При этом первый блок 20а датчика прикрепляют так, что положение электромагнитного датчика 22 относительно первого опознавательной точки 33а на костной пластине 30 известно для нескольких степеней свободы. Как показано на чертеже, когда корпус 28 вставлен в сверлильную втулку 18, а сверлильная втулка 18 полностью ввинчена в первую опознавательную точку 33а, положение датчика 22 известно для трех ортогональных поступательных степеней свободы. Альтернативно, блок 20а датчика можно прикрепить к первой опознавательной точке 33а напрямую. Затем положение датчика 22 первого блока 20а датчика определяют для неизвестной степени свободы. Например, второй блок 20b датчика или генератор поля неподвижно прикрепляют, как описано ниже, к костной пластине 20 в положении, известном относительно третьей опознавательной точки 33с костной пластины 30. Первый блок 20а датчика и второй блок 20b датчика можно расположить так, что во время калибровки оба блока 20а, 20b одновременно находятся в зоне действия устройства 10 идентификации опознавательных точек. Итак, когда устройством 10 идентификации опознавательных точек управляют с целью генерации электромагнитного поля, каждый из блоков 20а, 20b датчика выдает сигналы или данные в блок 40 управления, чтобы блок 40 управления мог определить местонахождение и ориентацию датчика 22 первого блока 20а датчика относительно опознавательной точки 33а.
Например, при определении положения датчика 22 относительно опознавательной точки 33а блок 40 управления может получить информацию о форме ортопедического имплантата 30 и расположении элементов ортопедического имплантата 30. Кроме того, блок 40 управления может получить информацию о местоположении датчиков 22 первого и второго блоков 20а, 20b датчиков. Например, можно прикрепить первый и второй блоки 20а, 20b датчиков к предварительно выбранным опознавательной точкам 33а и 33с, или можно ввести в блок 40 управления информацию, относящуюся к опознавательным точкам 33а и 33с, к которым прикрепляют блоки 20а, 20b датчиков, например, посредством прикосновения пользователя к части интерфейса 42 для указания опознавательной точки, к которой прикреплены блоки датчиков. Сигналы первого блока 20а датчика и второго блока 20b датчика можно использовать в сочетании с информацией, относящейся к известным положениям первого блока 20а датчика и второго блока 20b датчика, чтобы определить местонахождение и ориентацию первого блока 20а датчика для одной или более неизвестных степеней свободы, например, для ранее неизвестной вращательной степени свободы.
Калибровка первого блока 20а датчика может предусматривать хранение калибровочных данных в блоке 40 управления и/или в первом блоке 20а датчика. Например, перед калибровкой блок 40 управления может интерпретировать сигнал, полученный от первого блока 20а датчика, чтобы указать ориентацию костной пластины 30 вдоль стрелки А. Хотя положение и ориентация первого блока 20а датчика могут быть интерпретированы правильно и без калибровки, сигнал, полученный от первого блока 20а датчика, может быть интерпретирован блоком 40 управления неверно, например, он может ошибочно показать, что костная пластина 30 имеет неверную ориентацию 31. Тем не менее, с помощью сигнала положения второго блока 20b датчика, блок 40 управления может определить, что сигнал, полученный от первого блока 20а датчика, относится не к стрелке A, а скорее к стрелке В. Используя эту информацию, блок 40 управления может определить отклонение, например, угол Е, чтобы калибровать сигнал, принятый от первого блока 20а датчика. После калибровки на основе калибровочных данных и входных сигналов, полученных от первого блока 20а датчика, блок 40 управления может определить точное местонахождение и ориентацию костной пластины 30 без дополнительных входных сигналов от второго блока 20b.
После калибровки первого блока 20а датчика второй блок 20b датчика можно снять с ортопедического имплантата 30 и имплантировать ортопедический имплантат 30 в тело пациента. После имплантации, как более подробно описано ниже, откалиброванный блок 20а датчика и устройство 10 идентификации опознавательных точек можно использовать для нацеливания на опознавательную точку 32 и другие расположенные в зоне действия опознавательные точки ортопедического имплантата 30. Нацеливание на опознавательные точки, находящиеся вне зоны действия, можно произвести при помощи второго датчика, применяя, как описано ниже, так называемый скачкообразный метод.
Дополнительно или альтернативно, первый блок 20а датчика можно откалибровать без использования второго блока 20b датчика посредством неподвижного прикрепления устройства 10 идентификации опознавательных точек к ортопедическому имплантату 30. Устройство 10 идентификации опознавательных точек можно неподвижно прикрепить в известном положении относительно опознавательной точки на костной пластине 30, например, прикрепив калибровочную деталь к соединительной детали 12 и прикрепив калибровочную деталь к предварительно выбранной опознавательной точке, например, к опознавательной точке 33b. Известное положение устройства 10 идентификации опознавательных точек можно использовать в качестве опорной точки для калибровки первого блока 20а датчика способом, аналогичным способу, описанному выше в отношении известного положения второго блока 20b датчика.
Альтернативно, первый блок 20а датчика можно откалибровать без использования второго блока 20b датчика или генератора поля, а обеспечив наличие на дистальном конце корпуса 28 по меньшей мере двух отдельных сопрягаемых конструктивных элементов для введения в зацепление с двумя предварительно выбранными опознавательными точками или опорными конструктивными элементами, расположенными в ортопедическом имплантате или на ортопедическом имплантате. Например, как показано на фиг.13, корпус 28 может быть введен в зацепление с ортопедическим имплантатом 30 таким образом, что положение корпуса относительно ортопедического имплантата известно для шести степеней свободы, благодаря чему калибровка при помощи второго блока 20b датчика или генератора поля не нужна. Корпус 28 можно ввести в зацепление с ортопедическим имплантатом 30, прикрепив его снаружи к сверлильной втулке 18. Ортопедический имплантат 30 может содержать группу опознавательных точек 132a-132d, а сверлильная втулка 18 можно быть соединена с ортопедическим имплантатом 30 в конкретной известной опознавательной точке 132b.
Корпус 28 может содержать выступ 130, предназначенный для соприкосновения с ортопедическим имплантатом 30 при нахождении корпуса 28 в конкретном положении относительно ортопедического имплантата 30. Например, выступ 130 может содержать конец 131, соприкасающийся с поверхностью ортопедического имплантата 30. Соприкосновение конца 131 с ортопедическим имплантатом 30 указывает на то, что корпус 28 и, следовательно, датчик 22, соединенный с корпусом 28, расположен в известном положении относительно ортопедического имплантата 30.
В некоторых реализациях, сверлильная втулка 18, соединенная с корпусом 28, находится в зацеплении с ортопедическим имплантатом 30 посредством резьбового соединения. Выступ 130 может быть выполнен с возможностью обеспечения ввода сверлильной втулки 18 в зацепление с опознавательной точкой 132b путем вращения относительно ортопедического имплантата 30. В конкретном известном положении выступ 130 соприкасается с ортопедическим имплантатом 30, препятствуя дальнейшему вращению сверлильной втулки 18 и корпуса 28, и угловое положение корпуса 28 относительно ортопедического имплантата 30 известно. Так как датчик 22, соединенный с корпусом 28, предоставляет информацию о положении для пяти степеней свободы, а известное угловое положение указывает шестую степень свободы, калибровка датчика 22 при помощи второго блока датчика или генератора поля не требуется.
Аналогично, как показано на фиг.14, корпус 28 может содержать две части 141, 143, выполненные для введения в зацепление с двумя отдельными отверстиями 132а, 132b или другими конструктивными элементами ортопедического имплантата 30. Два отдельных сопрягаемых конструктивных элемента 141, 143 корпуса 28 могут быть выполнены так, что указанные сопрягаемые конструктивные элементы могут только одновременно войти в зацепление с отверстиями 132а, 132b в единственном положении относительно ортопедического имплантата 30. Таким образом, поскольку известно, что если оба сопрягаемых конструктивных элемента 141, 143 находятся в зацепление с отверстиями 132а, 132b ортопедического имплантата 30, то корпус 28 находится в единственном положении, и положение первого блока 20а датчика известно, исходя из надлежащего зацепления корпуса с ортопедическим имплантатом, для шести степеней свободы без проведения отдельной процедуры калибровки.
В некоторых реализациях, как более подробно описано ниже со ссылкой на фиг.7, первый блок 20а датчика можно откалибровать без использования второго блока 20b датчика или генератора поля путем присоединения блока 20а датчика или датчика 22 к рукоятке 60, которая может быть введена в зацепление с ортопедическим имплантатом 30 в известном положении. Поскольку положение рукоятки 60 относительно ортопедического имплантата 30 и положение датчика 22 относительно рукоятки 60 известны, также известно положение датчика 22 относительно костной пластины 30.
Как показано на фиг.4, после калибровки первого блока 20а датчика и имплантации ортопедического имплантата 30, устройство 10 идентификации опознавательных точек и блок 40 управления можно использовать для нацеливания на расположенные в зоне действия дополнительные опознавательные точки 32 ортопедического имплантата 30. Например, ортопедический имплантат 30 может быть имплантирован рядом с костью 50 пациента, под кожу 52 пациента, посредством ввода ортопедического имплантата через разрез 52а в коже пациента. Следовательно, отверстия 32 в костной пластине 30 не видны, так как они закрыты кожей 52 и другими тканями пациента. Однако, так как положение первого блока 20а датчика относительно устройства идентификации опознавательных точек известно для шести степеней свободы, расположение опознавательных точек 32 ортопедического имплантата 30, находящихся в зоне действия, можно определить на основе известных положений опознавательных точек 32 относительно блока 20а датчика, если датчик 20а также находится в зоне действия.
Для нацеливания на одну из опознавательных точек 32, устройство 10 идентификации опознавательных точек устанавливают вблизи ортопедического имплантата 30 так, что заостренный конец 16а сверлильного кондуктора 16 соприкасается с кожей пациента. Когда первый блок 20а датчика расположен в зоне действия устройства 10 идентификации опознавательных точек, и генератор 10а электромагнитного поля создает электромагнитное поле, блок 40 управления принимает сигналы, которые созданы первым блоком 20а датчика и показывает положение первого блока 20а датчика относительно устройства 10 идентификации опознавательных точек. Используя сигналы, полученные от первого блока 20а датчика, блок 40 управления может определить положение устройства 10 идентификации опознавательных точек относительно опознавательных точек 32 ортопедического имплантата 30. Блок 40 управления выводит на пользовательский интерфейс 42 информацию о положении устройства 10 идентификации опознавательных точек относительно опознавательных точек 32 ортопедического имплантата 30. При помощи пользовательского интерфейса 42 хирург или другой оператор может установить устройство 10 идентификации опознавательных точек в таком положении, при котором интерфейс 42 показывает, что заостренный конец 16а сверлильного кондуктора 16 находится прямо над выбранной опознавательной точкой 32 ортопедического имплантата 30. В некоторых реализациях, интерфейс 42 содержит первый элемент 44а устройства идентификации, например, первый круг, указывающий положение дистального заостренного конца 16а сверлильного кондуктора 16. Таким образом, если первый элемент 44а отображения устройства идентификации совмещен с элементом 46а опознавательной точки, который соответствует и обозначает целевую опознавательную точку 32, то интерфейс 42 указывает на то, что заостренный конец 16а сверлильного кондуктора 16 находится прямо над опознавательной точкой 32, представленной элементом 46а опознавательной точки. Кроме того, интерфейс 42 может содержать различные графические элементы, а также аудио- и тактильные выводы.
Если положение опознавательной точки 32 известно, то опознавательную точку 32 можно обнажить например, сделав разрез в области заостренного конца 16а сверлильного кондуктора 16, когда, как показано на пользовательском интерфейсе 42, первый элемент 44а устройства идентификации совмещен с элементом 46а опознавательной точки. Затем в зацепление с костью пациента и/или опознавательной точкой можно ввести штифт предварительной фиксации, костный винт с блокировкой, костный винт без блокировки или костные винты с изменяемым углом и блокировкой, которые могут быть введены в зацепление с костью пациента или опознавательной точкой 32. Кроме того, отверстие в кости пациента под один или более вышеупомянутых крепежных элементов может быть выполнено с помощью дрели или другого инструмента.
Интерфейс 42 блока 40 управления также может показывать текущее угловое положение устройства 10 идентификации опознавательных точек относительно ортопедического имплантата 30 или опознавательной точки 32 для подтверждения приемлемого позиционирования инструмента относительно ортопедического имплантата 30. Например, блок 40 управления может вывести на дисплей текущий угол наклона сверлильного кондуктора 16 относительно отверстия с изменяемым углом и блокировкой в ортопедическом имплантате 30 таким образом, что оператор, например хирург, может подтвердить, что отверстие, просверленное в кости пациента 50, обеспечит в результате приемлемый угол для крепежного элемента с изменяемым углом и блокировкой. В некоторых реализациях, интерфейс 42 содержит второй элемент 44b устройства идентификации, например, второй круг, который представляет проксимальную часть устройства 10 идентификации опознавательных точек, и третий элемент 44с устройства идентификации, который представляет ось, проходящую от первого элемента 44а устройства идентификации до второго элемента 44b устройства идентификации. Как показано на фиг.4, если первый элемент 44а устройства идентификации и второй элемент 44b устройства идентификации приближаются друг к другу, угол наклона устройства 10 идентификации опознавательных точек приближается к нулю градусов, если отсчитывать от опорной оси, например, от центральной сквозной оси отверстия ортопедического имплантата. Таким образом, если первый элемент 44а устройства идентификации и второй элемент 44b устройства идентификации расположены концентрически, значит, устройство 10 идентификации опознавательной точки расположено параллельно опорной оси.
Блок 40 управления принимает сигнал, который показывает положение устройства 10 идентификации опознавательных точек относительно опознавательной точки 32 ортопедического имплантата 30. Этот сигнал может быть принят от датчика 22, например, первого блока 20а датчика. Используя сигнал, полученный от датчика 22, блок 40 управления определяет положение инструмента относительно опознавательной точки 32. Кроме того, блок 40 управления сравнивает положение инструмента с приемлемым диапазоном положений, например, с диапазоном приемлемых положений крепежного элемента относительно опознавательной точки 32. Например, опознавательная точка 32 может представлять собой отверстие с изменяемым углом и блокировкой, а крепежный элемент может представлять собой костный винт, выполненный с возможностью установки под изменяемым углом и блокировкой в отверстии с изменяемым углом. Винт с изменяемым углом и блокировкой и отверстие с изменяемым углом и блокировкой могут иметь ограниченный диапазон углов, применение которых апробировано или показано для данной процедуры. В другом примере, если инструмент содержит сверло, блок 40 управления может сравнивать угол наклона сверла относительно центральной сквозной оси отверстия с изменяемым углом и блокировкой и приемлемый угол ввода отверстия с изменяемым углом и блокировкой. Кроме того, конкретная медицинская процедура может потребовать, чтобы крепежный элемент был введен относительно опознавательной точки под конкретным углом в конкретном положении. Например, хирург или другое лицо может определить, что конкретный костный отломок расположен под первым углом относительно отверстия с изменяемым углом и блокировкой или отверстием без блокировки. Блок 40 управления может определить такое наведение устройства 10 идентификации опознавательных точек на костный отломок, при котором костный отломок может быть захвачен и закреплен крепежным элементом.
В некоторых реализациях, блок 40 управления выводит на графический пользовательский интерфейс 42 индикацию того, что положение устройства 10 идентификации опознавательных точек относительно опознавательной точки 32 приемлемо. Например, вывод на графический пользовательский интерфейс 42 может включать в себя один или более элементов, например, элемент, представляющий угол устройства 10 идентификации опознавательной точки относительно оси опознавательной точки 32, один или более элементов, представляющих приемлемые положения устройства 10 идентификации опознавательных точек относительно опознавательной точки 32, один или более элементов, представляющих неприемлемые положения устройства 10 идентификации опознавательных точек относительно опознавательной точки 32, численное представление угла наклона устройства 10 идентификации опознавательных точек относительно оси опознавательной точки 32, численное представление максимального приемлемого угла ввода крепежного элемента, элемент, указывающий на приемлемость текущего положения устройства 10 идентификации опознавательных точек, графическое представление приемлемой конической области винта с изменяемым углом или с изменяемым углом и блокировкой, и элемент, указывающий на неприемлемость текущего положения устройства 10 идентификации опознавательных точек.
В некоторых реализациях, например, когда применяют ортопедический имплантат 30 особенно большого размера, некоторые опознавательные точки ортопедического имплантата 30 могут находиться слишком далеко от первого блока 20а датчика для того, чтобы на них можно было осуществить нацеливание с помощью первого блока 20а датчика. В таких реализациях, помимо прочего, для нацеливания на опознавательные точки, расположенные слишком далеко от первого блока 20а датчика или вне зоны действия, к ортопедическому имплантату 30 можно прикрепить второй блок 20b датчика в месте, расположенном в зоне действия и где также находится первый блок 20а датчика. Как показано на фиг.5, второй блок 20b датчика можно прикрепить к ортопедическому имплантату 30 через небольшой разрез, который можно сделать, применяя устройство идентификации опознавательных точек и первый блок 20а датчика, чтобы уменьшить число и размер разрезов, необходимых для крепления дистальной части 30b ортопедического имплантата 30.
После этого, используя в качестве опорной точки местонахождение и ориентацию первого блока 20а датчика, можно откалибровать второй блок 20b датчика. Например, второй блок 20b датчика можно откалибровать на основе сигнала, принятого от первого блока 20а датчика, когда первый блок 20а датчика и второй блок 20b датчика расположены в одной и той же зоне действия устройства 10 идентификации опознавательных точек. Известное положение и ориентацию первого блока 20а датчика можно использовать в качестве опорной точки для определения неизвестной степени свободы второго блока 20b датчика.
После того, как второй блок 20b датчика был откалиброван, блок 40 управления может изменить или переместить глобальную систему координат системы 300 нацеливания из местоположения первого блока 20а датчика в местоположение второго блока 20b датчика. В контексте данного описания это называется нацеливанием скачкообразным методом. Например, сначала блок 40 управления может определить положение устройства 10 идентификации опознавательных точек, опираясь на положение первого блока 20а датчика, расположенного на проксимальном конце костной пластины 30. Однако после прикрепления к ортопедическому имплантату 30 и калибровки второго блока 20b датчика блок 40 управления может сменить свою глобальную систему координат, чтобы определить положение устройства 10 идентификации опознавательных точек опираясь не на положение первого блока 20а датчика, а опираясь на положение второго блока 20b датчика. После этого с помощью второго блока 20b датчика можно осуществить нацеливание на опознавательные точки 32 в дистальной части 30b ортопедического имплантата 30. При желании, первый блок 20а датчика можно удалить, как показано на фиг.6.
Перемещение глобальной системы координат можно повторять столько раз, сколько необходимо, в зависимости от протяженности и числа опознавательных точек в ортопедическом имплантате. Чтобы уменьшить число выполняемых калибровок дополнительных датчиков, оператор может установить откалиброванный первый блок 20а датчика посередине ортопедического имплантата. Например, если длина пластины составляет 95 см, а ширина зоны действия составляет 50 см, то после установки первого блок 20а датчика посередине пластины хирургу лишь необходимо передвигать устройство 10 идентификации опознавательных точек с одной стороны блока датчика в другую, не перемещая при этом блок датчика.
При применении скачкообразного метода, так как устройство 10 идентификации опознавательных точек перемещается относительно второго блока 20b датчика, соответственно изменяются сигналы, генерируемые вторым блоком 20b датчика. Блок 40 управления может обновить интерфейс 42 пользователя, чтобы показать текущее положение устройства 10 идентификации опознавательных точек относительно опознавательных точек 32 ортопедического имплантата 30. Кроме того, как описано выше, блок 40 управления может подтвердить приемлемое позиционирование устройства 10 идентификации опознавательных точек относительно ортопедического имплантата 30. Имея эту информацию, оператор, управляющий устройством 10 идентификации опознавательных точек, может применить ее для совмещения сверлильной втулки 16 и/или другого инструмента с опознавательной точкой 32, например, с конкретным глухим отверстием 32 ортопедического имплантата 30.
Фиг.7 иллюстрирует систему 700 для нацеливания на опознавательные точки. Система 700 содержит блок 40 управления, устройство 10 идентификации опознавательных точек и установочную рукоятку 60, соединенную с ортопедическим имплантатом 30. Установочную рукоятку 60 можно использовать для манипулирования ортопедическим имплантатом 30 во время имплантации в тело пациента. Установочная рукоятка 60 с возможностью снятия соединена с ортопедическим имплантатом 30, так что посредством установочной рукоятки 60 во время имплантации можно направлять ортопедический имплантат 30, а после имплантации ее можно снять с ортопедического имплантата 30. Установочную рукоятку 60 соединяют с ортопедическим имплантатом 30 в фиксированном положении относительно костной пластины 30. Кроме того, установочная рукоятка 60 содержит датчик 61 электромагнитного поля, реагирующий на электромагнитные поля, генерируемые устройством 10 идентификации опознавательных точек. Датчик 61 прикрепляют к установочной рукоятке 60 в известном, фиксированном месте установочной рукоятки 60. Таким образом, когда установочная рукоятка 60 прикреплена к ортопедическому имплантату 30, известны все шесть степеней свободы датчика 61, и известно местоположение и ориентация датчика 61 относительно опознавательных точек 32 ортопедического имплантата 30.
Если одна из нескольких степеней свободы датчика 61 на установочной рукоятке 60 изначально неизвестна, то датчик 61 на установочной рукоятке 60 можно откалибровать, применяя второй датчик 22, прикрепленный к ортопедическому имплантату 60 в известном месте и с известной ориентацией относительно опознавательной точки 32 ортопедического имплантата 30 или относительно известной опознавательной точки на установочной рукоятке 60. Альтернативно, можно прикрепить устройство 10 идентификации опознавательных точек к ортопедическому имплантату 30 в известном месте и с известной ориентацией относительно опознавательной точки ортопедического имплантата 30 или относительно известной опознавательной точки на установочной рукоятке 60. В некоторых реализациях, датчик 61 на установочной рукоятке 60 может поставляться в предварительно откалиброванном состоянии, так что после прикрепления установочной рукоятки 60 к ортопедическому имплантату 30 положение датчика 61 относительно опознавательных точек 32 ортопедического имплантата 30 известно в отношении шести степеней свободы.
В других реализациях, система нацеливания содержит большой плоский генератор поля, расположенный под частью тела или костным отломком. Кроме того, указанная система нацеливания содержит два датчика, один из которых, например, соединен с пластиной, а другой - со сверлильной втулкой. Если сгенерированное поле больше объема самого крупного имплантата, предназначенного для применения с этой системой, то для нацеливания на все опознавательные точки на пластине не требуется ни скачкообразный метод, ни расположение блока датчика посередине пластины.
На фиг.8А-12B показаны различные реализации крепления блока 20 датчика к корпусу 28 или крепления корпуса 28 к ортопедическому имплантату 30. В соответствии с фиг.8А, корпус 28 блока 20 датчика содержит выступ 62 и головку 64, а также датчик 22, установленный в известном положении относительно корпуса 28, например, на конце 65 выступа 62. Корпус 28 изогнут вокруг продольной оси 28а. Например, выступ 62 корпуса 28 может быть изогнут так, что когда выступ 62 вставляют в сверлильную втулку 18, выступ 62 выпрямляется, чтобы соответствовать по форме ограниченному пространству внутри сверлильной втулки 18. При этом выступ 62 давит на внутреннюю поверхность сверлильной втулки 18, закрепляя с фрикционной посадкой корпус 28 в сверлильной втулке 18. Головка 64 корпуса 28 входит в зацепление с концом сверлильной втулки 18, чтобы ограничить ввод корпуса 28 в сверлильную втулку 18.
Альтернативно, как показано на фиг.8B, выступ 62 может содержать коническую внешнюю поверхность или внешнюю поверхность в форме слегка усеченного конуса. Проксимальный конец 63 выступа 62, расположенный вблизи головки 64, может иметь больший внешний диаметр, чем дистальный конец 65 выступа 62. При вставке корпуса 28 в сверлильную втулку 18, трение между конической поверхностью выступа 62 и внутренней стороной сверлильной втулки 18 позволяет закрепить корпус 28 в сверлильной втулке 18. В некоторых реализациях, сверлильная втулка 18 может содержать коническую внутреннюю часть, обеспечивающую гнездо для ввода в нее выступа 62.
В другом альтернативном варианте, показанном на фиг.9, корпус 28 выполнен с возможностью ввода в зацепление с сопрягаемым конструктивным элементом для крепления корпуса 28 к ортопедическому устройству. Корпус 28 содержит расщепленный конец 66, который может расширяться, обеспечивая возможность его ввода в зацепление с сопрягаемым конструктивным элементом и, таким образом, обеспечивая неподвижное закрепление корпуса 28 на ортопедическом устройстве, например, на ортопедическом имплантате. В расщепленный конец 66 может быть вставлено ребро или клин сопрягаемого конструктивного элемента ортопедического имплантата для крепления корпуса 28 к ортопедическому имплантату. Например, ребро или клин сопрягаемого конструктивного элемента может раздвинуть расщепленный конец 66, чтобы создать фрикционную посадку между внешней поверхностью расщепленного конца 66 и частью сопрягаемого конструктивного элемента. Кроме того, корпус 28 содержит многоугольную внешнюю часть 68 для сопряжения с комплементарной многоугольной частью, например, с гнездом ортопедического имплантата. Во время использования устройства многоугольная внешняя часть 68 предотвращает нежелательное вращение корпуса 28 относительно сопрягаемого конструктивного элемента.
Альтернативно, как показано на фиг.10, корпус 28 блока 20 датчика может содержать головку 70 и по существу цилиндрическую внешнюю поверхность 71. В по существу цилиндрической внешней поверхности 71 корпуса 28 предусмотрена кольцевая канавка 73, в которую частично вставлена сжимаемая деталь 72, например, пружинная деталь или упругое кольцо. Когда корпус 28 вставляют в сверлильную втулку 18, сжимаемая деталь 72 сжимается в сверлильной втулке 18 и обеспечивает фрикционную посадку, закрепляя корпус 28 в сверлильной втулке 18. Опционально, сверлильная втулка 18 может содержать внутреннюю кольцевую канавку, в которую может расширятся сжимаемая деталь для крепления корпуса 28 к сверлильной втулке 18. Головка 70 может ограничить ввод корпуса 28 в сверлильную втулку 18, чтобы обеспечить размещение датчика в известном положении относительно сверлильной втулки 18. Дополнительно, по существу цилиндрическая внешняя поверхность 71 корпуса 28 может иметь плоский участок 74, который может быть сопряжен с комплементарным плоским участком сверлильной втулки 18 или сопрягаемым конструктивным элементом, позволяющим ограничить вращение корпуса 28 в сверлильной втулке 18 и/или обеспечить известное угловое положение корпуса 28 относительно сверлильной втулки 18. Головка 70 также имеет плоский участок 75, который может быть совмещен с комплементарной поверхностью, чтобы обеспечить выравнивание и устойчивость при вращении.
В еще одном альтернативном варианте, показанном на фиг.11A, 11B, корпус 28 содержит конец 76, предназначенный для ввода в сверлильную втулку 18. На конце 76 предусмотрена внешняя кольцевая канавка 78 и/или сферический захват 80. Кроме того, на конце 76 предусмотрена фаска 77. Сверлильная втулка 18 (фиг.11B) содержит шариковый фиксатор 81, установленный на внутренней стороне сверлильной втулки 18. Шариковый фиксатор 81 содержит шарик 82, который частично входит в сквозное отверстие 19 сверлильной втулки 18. Кроме того, шариковый фиксатор 81 частично расположен внутри углубления 83, выполненного на внутренней поверхности сверлильной втулки 18 и принимающего указанный шарик. Шариковый фиксатор 81 содержит упругую деталь 84, которая расположена в углублении 83, выталкивает шарик в направлении сквозного отверстия и сжимается при воздействии силы на шарик 82. Когда конец 76 корпуса 28 вставляют в сверлильную втулку 18, фаска 77 корпуса 28 вдавливает шарик 82 шарикового фиксатора 81 в углубление 83, обеспечивая возможность перемещения корпуса 28 над шариковым фиксатором 81. Когда кольцевую канавку 78 совмещают с шариковым фиксатором 81, шарик 82 перемещается в кольцевую канавку 78, препятствуя дальнейшему перемещению конца 76 в сверлильной втулке 18. Корпус 28 можно вращать до тех пор, пока шарик 82 не западет в захват 80, который препятствует вращению корпуса 28 в сверлильной втулке 18. Опционально, конец 76 может содержать кольцевую канавку 78 без захвата 80, или конец 76 может содержать захват 80 без кольцевой канавки 78. В других реализациях, шариковый фиксатор 81 может быть предусмотрен не в сверлильной втулке 18, а на конце 76 корпуса 28, причем на внутренней поверхности сверлильной втулки 18 может быть предусмотрена кольцевая канавка и/или захват, принимающий шарик 82 шарикового фиксатора 81.
В некоторых реализациях, корпус 28 может быть введен в зацепление с ортопедическим имплантатом посредством крепления его снаружи к сверлильной втулке 18. Например, как показано на фиг.12А, 12B, чтобы обеспечить держатель для корпуса 28, к сверлильной втулке 118 можно прикрепить крепежную деталь 100. Сверлильная втулка 118 содержит резьбовой дистальный конец 117, прикрепляемый к резьбовому участку 98 ортопедического имплантата 30. Сверлильная втулка 118 содержит конический проксимальный конец 120 и кольцевую канавку 122. Сверлильная втулка 118 может иметь паз 123, расположенный в канавке 122 или вблизи канавки 122 на внешней стороне сверлильной втулки 118. Кроме того, в сверлильной втулке 118 имеется сквозное отверстие 118а для пропускания инструмента и/или крепежных элементов, например, костных штифтов.
Крепежная деталь 100 содержит плечо 102, соединяющее разрезное кольцо 104 (фиг.12B) и трубчатую часть 106. Разрезное кольцо 104 предназначено для ввода в зацепление с канавкой 122 сверлильной втулки 118. Крепежная деталь 100 также может содержать лапку 105, расположенную на разрезном кольце 104 или вблизи разрезного кольца 104. Чтобы соединить крепежную деталь 100 со сверлильной втулкой 118, разрезное кольцо 104 устанавливают вокруг конического конца 120 сверлильной втулки 118. Так как внутренний диаметр разрезного кольца меньше внешнего диаметра сверлильной втулки, при перемещении крепежной детали 100 вдоль конического конца 120 разрезное кольцо 104 изгибается наружу. Разрезное кольцо 104 продолжает перемещаться до тех пор, пока разрезное кольцо 104 не будет принято канавкой 122 для крепления крепежной детали 100 к сверлильной втулке 118. Лапка 105 крепежной детали входит в зацепление с пазом 123 сверлильной втулки 118, чтобы ограничить вращение крепежной детали 100 относительно сверлильной втулки 118. Альтернативно, лапка (не показана) для ввода в разрез разрезного кольца 104 с целью ограничения вращения крепежной детали 100 относительно сверлильной втулки 118 может быть выполнена на внешней стороне сверлильной втулки 118, например, в канавке 122.
Трубчатая часть 106 крепежной детали 110 принимает корпус 28 блока 20 датчика или содержит датчик 22. Таким образом, в результате прикрепления крепежной детали 110 к сверлильной втулке 118 датчик 22 прикреплен к сверлильной втулке 118 в известном положении относительно сверлильной втулки 118 и костной пластины 30. При этом, крепежная деталь 100 может представлять собой компонент корпуса 28 или блока 20 датчика.
Альтернативно, плечо 102 и трубчатая часть 106 могут быть интегрированы со сверлильной втулкой 118.
Плечо 102 крепежной детали 100 может быть выполнено с такой формой, что при соединении крепежной детали 100 со сверлильной втулкой 118 крепежная деталь не блокирует доступ к сквозному отверстию 118а сверлильной втулки 118. В результате, с помощью крепежной детали 100 блок 20 датчика можно соединить со сверлильной втулкой 118, не препятствуя доступу к внутренней части сверлильной втулки 118. Кроме того, крепежная деталь 100 может быть выполнена с такой формой, что трубчатая часть 106 входит внутрь или в зацепление с опознавательной точкой 99 костной пластины 30 при креплении крепежной детали 100 к сверлильной втулке 118 и прикреплении сверлильной втулки 118 к костной пластине 30.
Альтернативно, плечо 102 может быть выполнено с возможностью ввода в сквозное отверстие 118а, чтобы обеспечить надлежащую центровку датчика относительно сверлильной втулки 118 при прикреплении и ограничить вращение между датчиком 22 и сверлильной втулкой 118.
Как показано на фиг.15, и фиг.16А-16С для определения во время операции местоположения отверстий под винты и траектории сверления или ввода винта в системе 400 используется оптическое слежение. Система 400 содержит инфракрасную (IR) камеру 402, обменивающуюся данными с блоком 40 управления и источником 404 IR-света. Камера 402 обнаруживает IR-свет, отражающийся от реперных меток в операционной области. Блок 40 управления принимает от камеры 402 сигналы, указывающие на свет, отраженный от реперных меток. Используя сигналы, полученные от камеры 402, блок 40 управления определяет относительные положения реперных меток. Реперные метки прикрепляют к различным инструментам в известных, определенных местах, так что по положениям реперных меток можно определить положения инструментов.
Система 400 содержит дрель 410 или другой инструмент, а также кондуктор 420 и рукоятку 460 для присоединения к ортопедическому имплантату 30. Реперную метку 450а-450с соединяют с каждой дрелью 410, кондуктором 420 и рукояткой 460. Реперная метка 450а-450c может быть соединена напрямую с инструментом или посредством другого элемента. Например, как показано на чертеже, реперная метка 450а прикреплена к концу установочной рукоятки 460, которую можно использовать для имплантации ортопедического устройства 30. В качестве альтернативы реперная метка 450а может предназначаться для крепления напрямую к ортопедическому устройству 30.
В некоторых реализациях, реперные метки 450а-450c представляют собой съемные компоненты, которые могут быть прикреплены и сняты соответственно с установочной рукоятки 460, кондуктора 420 и дрели 410. В некоторых реализациях, реперные метки 450а-450c выполнены как неподвижные элементы, которые интегрированы с установочной рукояткой 460, кондуктором 420 и дрелью 410, соответственно.
Как показано на фиг.16А и 16B, каждая реперная метка 450а, 450b содержит корпус 453 и отражающий материал, например, фольгу, расположенную внутри корпуса 453. Корпус 453 имеет отверстия 454, обнажающие отражающий материал. В некоторых реализациях, реперные метки 450а, 450b имеют три, четыре или большее число отверстий. На каждой реперной метке 450а, 450b промежуток между отверстиями 454 может быть различен или может быть предусмотрена такая конфигурация отверстий 454, благодаря которой блок 40 управления может установить различие между реперными метками 450а, 450b и, таким образом, установить различие между инструментами, к которым прикреплены реперные метки 450а, 450b, а камера может отследить местоположение и ориентацию реперных меток 450а, 450b.
В некоторых реализациях, реперные метки 450а-450c могут содержать не отверстия вдоль пластины, а множество отражающих сфер или других элементов. В некоторых реализациях, реперные метки 450а, 450b излучают IR-свет. Реперные метки 450а, 450b могут представлять собой отдельные или интегральные части отслеживаемых компонентов.
Кондуктор 420 содержит втулку 421, образующую внутренний канал, в который помещают сверло или другой инструмент. Втулка 421 может направлять сверло и предохранять ткань, окружающую операционную область. Заостренный конец 422 втулки 421 выполнен с размерами, позволяющими осуществить его ввод в зацепление с опознавательной точкой ортопедического имплантата 30. Например, заостренный конец 422 выполнен с размерами, позволяющими ему войти в одно из отверстий 32 ортопедического имплантата 30. В частности, заостренный конец 422 выполнен с таким размером, что он остается в отверстии 32 или соприкасается с отверстием 32, когда оператор регулирует угол кондуктора 420 относительно имплантата 30 или относительно оси отверстия 32. Если заостренный конец 422 расположен в одном из отверстий 32, оператор может осуществить наклон относительно имплантата 30, чтобы достичь требуемого угла, например, для сверления или ввода винта. Таким образом, во время регулировки ориентации втулки 421 относительно отверстия 32, местоположение в отверстии 32 можно сохранить.
Реперную метку 450а прикрепляют к концу установочной рукоятки 460. Так как реперная метка 450а соединена с установочной рукояткой 460 в известном положении, блок 40 управления может определить положение ортопедического имплантата 30, исходя из положения реперной метки 450а. Оператор может прикрепить реперную метку 450а к установочной рукоятке 460 после имплантации ортопедического имплантата 30, пока установочная рукоятка 460 все еще прикреплена к ортопедическому имплантату 30.
Как показано на фиг.16C, реперная метка 450c содержит ленту из отражающего материала, обернутую вокруг соединителя 411 дрели или сверла 413. Как показано на чертеже, отражающая лента 470 расположена вокруг соединителя 411 дрели, который присоединен между патроном 412 дрели 410 и сверлом 413. Реперная метка 450c может задавать положение вдоль оси втулки 421 кондуктора 420, а ось втулки 421 может быть определена, исходя из положения реперной метки 450b.
Альтернативно, реперная метка 450c может быть установлена в известном месте на патроне 412, сверле 413 или других частях дрели 410. В другом альтернативном варианте, с дрелью 410 могут быть использованы другие типы реперных меток, например, реперная метка, содержащая расположенный на плоскости отражающий материал или группу отражающих элементов.
На фиг.17 и 18 показаны примеры интерфейсов 500а, 500b для блока 40 управления. После установки оператором дрели 410 и кондуктора 420, блок 40 управления определяет положение дрели 410 и кондуктора 420 относительно ортопедического имплантата 30 или оси отверстия 32. Блок управления 40 выводит информацию об этих относительных положениях, например, на дисплей пользовательского интерфейса 500а или пользовательского интерфейса 500b. Блок управления может отслеживать местоположения и ориентации элементов, прикрепленных к реперным меткам 450а-450c. При изменении относительных положений, блок управления 40 определяет изменение, используя сигналы, полученные от камеры 402, вычисляет текущие положения и выводит обновленную информацию на дисплей пользовательского интерфейса 500а или пользовательского интерфейса 500b.
Признаки, описанные в отношении пользовательского интерфейса 500а, показанного на фиг.17, могут также присутствовать в пользовательском интерфейсе 500b, показанном на фиг.18, и наоборот. Пользовательский интерфейс 500а иллюстрирует вывод блока 40 управления для системы 400 перед сверлением отверстия или вводом винта. Пользовательский интерфейс 500b иллюстрирует вывод блока 40 управления, когда элементы системы находятся в других относительных положениях и после того, как с помощью системы 400 было просверлено отверстие или был введен винт.
Чтобы обеспечить возможность расчета относительных положений дрели 410, кондуктора 420 и ортопедического имплантата 30, реперные метки 450а-450c должны оставаться в поле зрения или в прямой видимости камеры 402. Если одна из реперных меток, например, загорожена, и уже не находится в поле зрения камеры 402, блок 40 управления может сигнализировать пользователю об этом препятствии.
Блок управления 40 может показывать положение кондуктора 420 или других инструментов относительно ортопедического имплантата 30. Хирург может использовать эти относительные положения, чтобы определить местоположение отверстий 32 или других опознавательных точек. После использования системы 400 для определения местоположения отверстия 32, оператор может сделать разрез над отверстием 32 и установить кондуктор 420 так, что конец 422 входит в зацепление с отверстием 32. Затем оператор может применить систему 400 для позиционирования кондуктора 420 относительно отверстия 32 с целью сверления и ввода винта или другого трансфиксационного компонента.
Блок 40 управления может обеспечить наличие множества индикаторов на одном пользовательском интерфейсе 500а или пользовательском интерфейсе 500b. Каждый из пользовательских интерфейсов 500а, 500b может, например, содержать один или более следующих индикаторов: индикатор 510 траектории, индикатор 520 длины винта или глубины сверления, индикатор 530 выбора типа компонента или винта, индикатор 540 столкновения компонента или траектории, индикатор 550 состояния и индикатор 560 конфигурации. Любая комбинация или подкомбинация указанных индикаторов может быть одновременно отображена на экране или другом дисплее.
Индикатор 510 траектории показывает текущую траекторию, заданную кондуктором 420. Индикатор 510 траектории может содержать линию 511 траектории, изображающую ориентацию втулки 421 относительно ортопедического имплантата 30 или относительно оси отверстия 32, показывающую траекторию, заданную кондуктором 420 в текущий момент времени. Кроме того, может быть показано изображение 512 ортопедического имплантата 30, и линия 511 траектории может быть отображена относительно изображения 512 в трех измерениях.
Индикатор 510 траектории также может содержать элемент 514, например круг, который изображает положение проксимального конца втулки 421. Индикатор 510 траектории может содержать элемент 515, который отображает положение дистального конца или заостренного конца 422 втулки 421, который может быть выведен на дисплей в виде круга меньшего размера, чем элемент 514. Линия 512 траектории может быть задана между элементами 514, 515. В некоторых реализациях, для центрирования кондуктора 420 по требуемой оси относительно ортопедического имплантата 30 или оси отверстия 32, оператор перемещает кондуктор 420 так, чтобы совместить элементы 514, 515. Это положение может обозначать, например, выравнивание перпендикулярно ортопедическому имплантату 30 или коаксиально с осью отверстия 32.
Одновременно на дисплей может быть выведено множество индикаторов траектории. Например, индикатор 510 траектории может показывать траекторию сверления относительно изображения 512, которое увеличено, чтобы показать вид спереди части ортопедического имплантата 30 возле конца 422 кондуктора 420. Второй индикатор 516 траектории может представлять собой, например, изображение 517 всего ортопедического имплантата 30. Таким образом, второй индикатор 516 траектории может изобразить оператору общее положение, показывая траекторию и положение интересующей опознавательной точки относительно всего ортопедического имплантата 30 в целом. Второй индикатор 516 траектории также может представлять собой второе изображение ортопедического имплантата 30, например, вид сбоку. На экран пользовательского интерфейса 500а или пользовательского интерфейса 500b может быть выведен один или оба индикатора 510, 516 траектории.
Индикатор 520 глубины сверления показывает глубину, на которую сверло было введено в ткань, соприкасающуюся с ортопедическим имплантатом 30. Например, индикатор 520 глубины сверления может показывать расстояние, пройденное сверлом в кости 50. Когда оператор сверлит вдоль какой-то траектории, числовой индикатор 522 показывает текущую глубину сверления. Глубину сверления также показывает графический индикатор 524, например, посредством вывода на дисплей изображений меток или делений, показываемых на инструментах.
Блок 40 управления может вычислить текущую глубину сверления, определяя относительное положение реперных меток 450с на дрели 410 и реперных меток 450b на кондукторе 420. Блок 40 управления может сохранять информацию, которая, например, указывает на расстояние между реперной меткой 450с и концом сверла 413, а также на расстояние между реперной меткой 450b и заостренным концом 422 втулки 421. При расположении в отверстии 32, заостренный конец 422 может находиться в известном положении относительно кости. Например, заостренный конец 422 может быть расположен на поверхности кости 50. Когда оператор перемещает сверло 413 через втулку 421, блок 40 управления рассчитывает относительные положения реперных меток 450b, 450с. Исходя из этих относительных положений, блок 40 управления вычисляет глубину сверления, как расстояние, на которое конец сверла 413 выступает за заостренный конец 422 втулки 421. Глубину сверления можно использовать для выбора длины винта. Например, оператор может выбрать винт, длина которого по существу равна глубине сверления. Итак, индикатор 520 глубины сверления может быть использован для указания длины винта подлежащего вставке.
Индикатор 530 выбора компонентов показывает компоненты или типы компонентов, например, винты с блокировкой в сравнении с винтами без блокировки, или многоосные винты в сравнении с одноосными винтами, которые могут быть использованы с текущей траекторией, заданной положением кондуктора 420 относительно ортопедического имплантата 30. Как показано на чертеже, графические изображения 531, 532 могут быть выведены на дисплей для изображения компонентов или способов, которые могут быть использованы с текущей траекторией кондуктора 420. Также для индикации компонентов, которые подходят для использования на текущей траектории, может служить текст или символы.
Различные трансфиксационные компоненты показаны только для использования при конкретных траекториях или диапазонах углов. Например, одноосный винт может быть показан только для ввода перпендикулярно ортопедическому имплантату 30. В проиллюстрированном на чертеже примере, текущая траектория не перпендикулярна ортопедическому имплантату. Поэтому изображение одноосного винта с блокировкой, например винта, на головке которого предусмотрена резьба, не выводится на дисплей в индикаторе 530 выбора компонентов. Это может означать, что одноосный винт с блокировкой не рекомендуется к применению, или что при текущей траектории вероятность успешного применения одноосного винта с блокировкой ниже минимального порогового значения.
Напротив, индикатор 530 выбора компонентов выводит на дисплей изображение 531 многоосного винта (например, винта с изменяемым углом) с деформируемой головкой и изображение 532 многоосного винта без блокировки, чтобы указать на возможность выбора одного из этих двух многоосных винтов для использования на текущей траектории. Когда оператор регулирует траекторию сверления, блок 40 управления вычисляет компоненты или типы компонентов, которые могут быть использованы на текущей траектории, и обновляет индикатор 530 выбора компонентов, чтобы показать текущий диапазон компонентов, которые могут быть использованы. Поэтому, когда оператор наклоняет кондуктор 420, задавая различные траектории, изображения 531, 532 элементов могут появляться или исчезать, показывая подходящие варианты компонентов, которые могут быть выбраны для этих траекторий. Как показано на фиг.18, индикатор 530 выбора компонентов также может указать на такую установку кондуктора 420, что никакие подходящие компоненты не могут быть использованы на текущей траектории.
На фиг.18 пользовательский интерфейс 500b содержит индикатор 540 столкновения траектории или винта, который показывает, что ориентация кондуктора 420 в результате приводит к траектории, которая пересекается с установленным винтом, ранее просверленным отверстием или другой линией действия. Когда с применением системы 400 сверлят отверстия или устанавливают трансфиксационный элемент, блок 40 управления сохраняет в памяти положение и глубину операции. Например, блок 40 управления может хранить в памяти положение ранее просверленных отверстий относительно ортопедического имплантата 30. Блок 40 управления может показать положение просверленного отверстия или винта в виде визуального элемента 542 относительно одного или обоих изображений 512, 516 ортопедического имплантата 30.
При изменении ориентации кондуктора 420, блок 40 управления определяет, пересекается ли текущая траектория с препятствием, например, с ранее просверленным отверстием или имплантированным винтом. Если определено, что текущая траектория встречает препятствие, например, пересекает стержень установленного винта, то индикатор 540 столкновения выдает на дисплее предупреждение. Это предупреждение может представлять собой, например, изменение цвета или визуальный элемент на пользовательском интерфейсе 500а или пользовательском интерфейсе 500b.
Если блок 40 управления определяет, что кондуктор 420 установлен так, что может столкнуться с препятствием, то блок 40 управления вычисляет наибольшее расстояние, которое может быть просверлено вдоль текущей траектории и не приведет к столкновению. Блок 40 управления выводит на дисплей индикатор 545 длины, который, например, показывает ограничения по длине элемента, вводимого по текущей траектории. В некоторых реализациях, индикатор 545 длины показывает наибольшую длину элемента, который можно использовать без столкновения или встречи с препятствием, например, наибольшую длину винта, не доходящего до препятствия.
Пользовательские интерфейсы 500а, 500b также могут отображать один или несколько индикаторов 550 состояния, которые показывают, осуществляет ли блок 40 управления в настоящее время слежение за элементами системы 400. Индикаторы 550 состояния могут представлять собой, например, цветные полосы рядом с изображениями элементов системы 400. Каждый индикатор 550 состояния может быть связан с конкретным элементом системы 400. Например, один индикатор 550 состояния может быть связан с ортопедическим имплантатом 30 и реперной меткой 450а, а другой индикатор 550 - с кондуктором 420. Например, когда реперные метки 450а-450c находятся в поле зрения камеры 402, индикатор 550 состояния указывает на выполнение надлежащего пространственного слежения, например, зеленым цветом. Если блок 40 управления определяет, что слежение за одним из элементов осуществляется не точно, например, когда загорожена реперная точка 450а-450c, соответствующий индикатор 550 состояния показывает нарушение слежения, например, посредством изменения на красный цвет. Посредством изменения цвета или других отображений индикатор 550 показывает оператору, какие элементы системы 400 могут нуждаться в регулировке для восстановления точного пространственного слежения.
Кроме того, блок 40 управления может вывести на пользовательские интерфейсы 500а, 500b один или более индикаторов 560 конфигурации. Индикаторы 560 конфигурации показывают текущую конфигурацию системы 400, например, указывают конкретный используемый ортопедический имплантат 30 и кондуктор 420. Используя экранный интерфейс, оператор может выбрать ортопедический имплантат 30, кондуктор 420, установочную рукоятку 460 и другие компоненты. Блок управления 40 может хранить в памяти библиотеку компонентов и инструментов, из которой оператор может выбрать компоненты подлежащие использованию. Блок 40 управления может хранить в памяти размеры и характеристики различных компонентов и инструментов для вычисления положения между положением различных комбинаций инструментов и компонентов. Кроме того, оператор может нажимать на индикаторы 560 конфигурации, чтобы во время процедуры осуществить новый выбор, например, отобразить изменения, возникающие из-за смены кондуктора 420 на кондуктор с другими размерами.
В качестве альтернативы оптическому слежению, система 400 может использовать слежение при помощи датчиков электромагнитного поля. Датчики электромагнитного поля могут быть использованы вместо реперных меток 450а-450c. Если блок 40 управления расположен в зоне действия электромагнитных полей, созданных генератором электромагнитного поля, то он может использовать сигналы, полученные от датчиков, чтобы определить относительные положения, и вывести информацию, отображаемую на экране пользовательских интерфейсов 500а, 500b.
В некоторых реализациях, реперные метки 450а-450c могут быть съемными или одноразовыми. В некоторых реализациях, реперные метки 450а-450c способны выдерживать автоклавную обработку и допускают многократное использование. Реперная метка 450а в процессе изготовления может быть предварительно собрана на рукоятке 460, а реперная метка 450b может быть заранее собрана на кондукторе 420. В некоторых реализациях, камера 402 может обмениваться данными с блоком 40 управления посредством беспроводной связи.
Выше была описана группа реализаций и альтернатив. Тем не менее, подразумевается, что различные модификации могут быть осуществлены без выхода за пределы сущности и объема заявляемого изобретения. Следовательно, в объем правовой охраны нижеприведенной формулы изобретения входят и другие реализации.
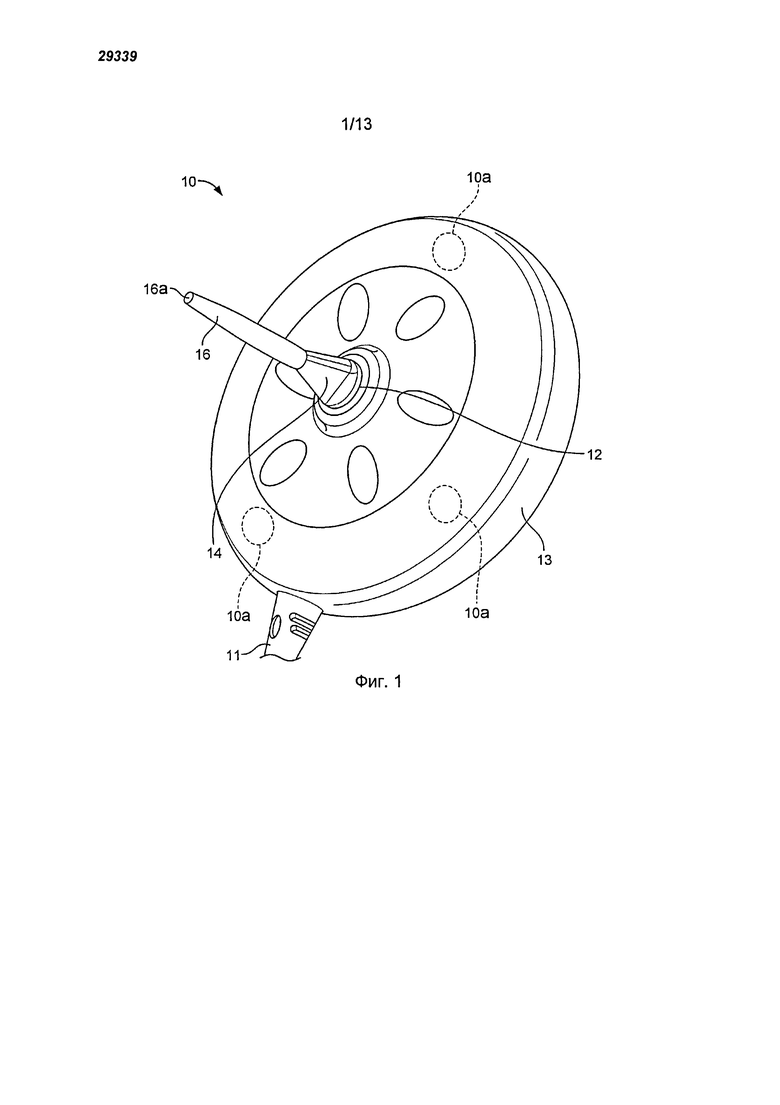
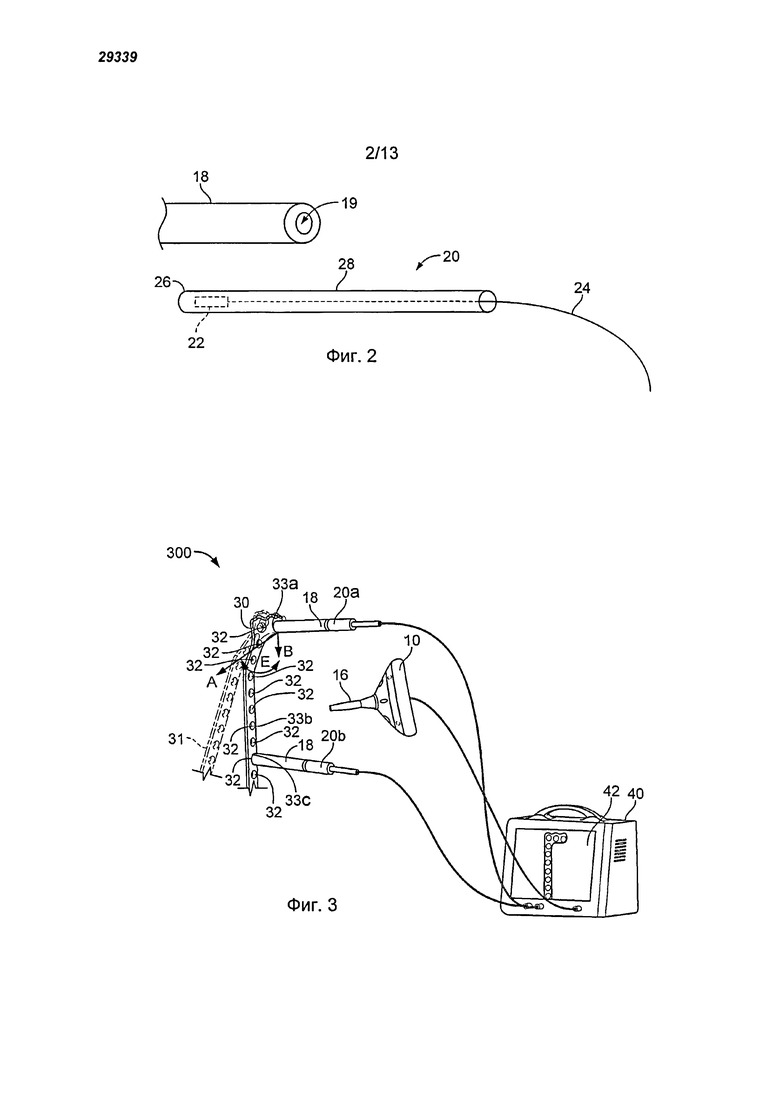
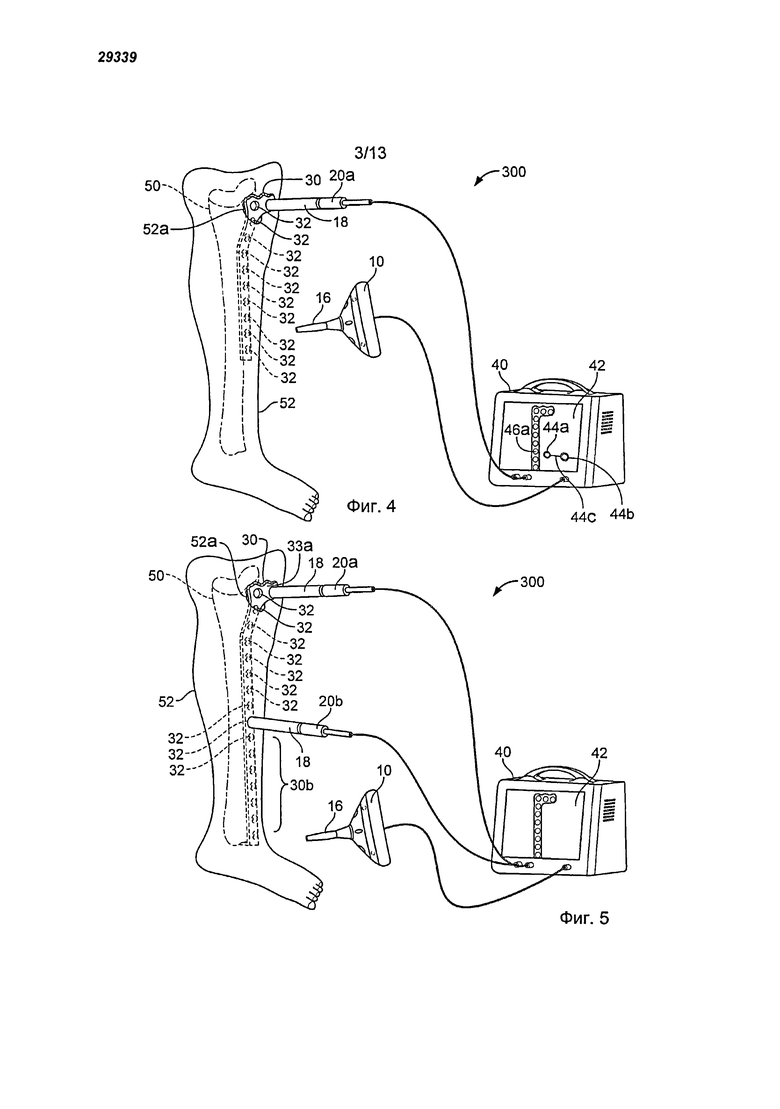
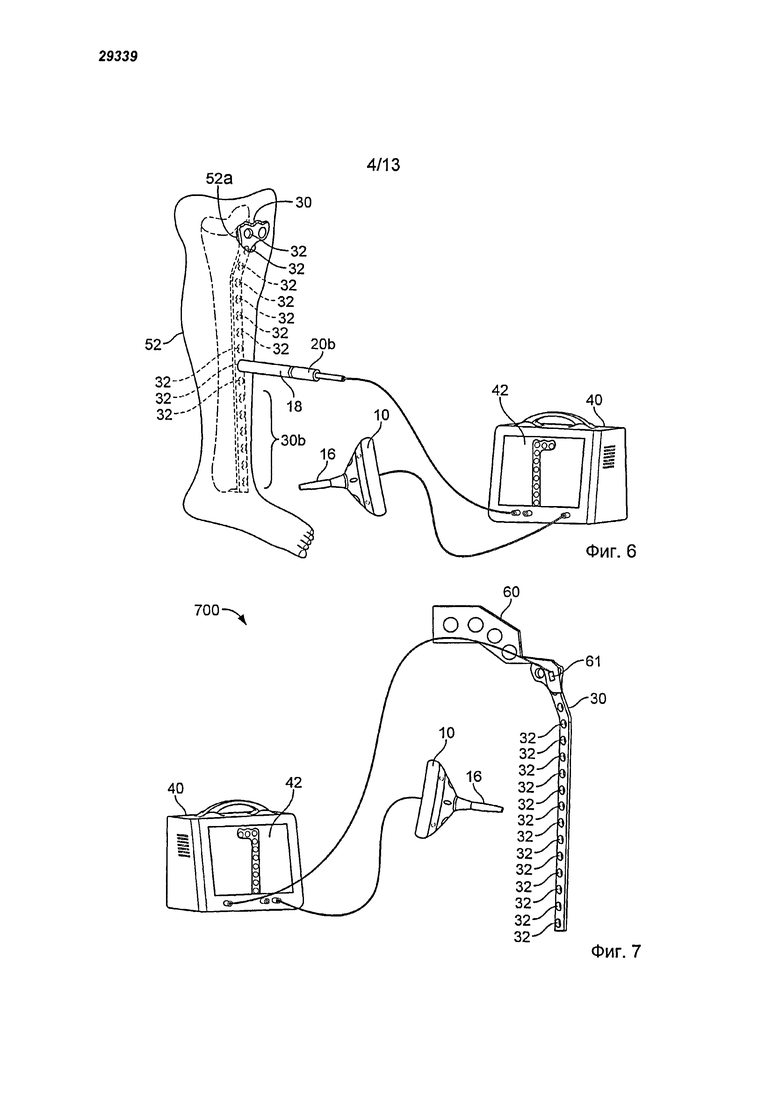
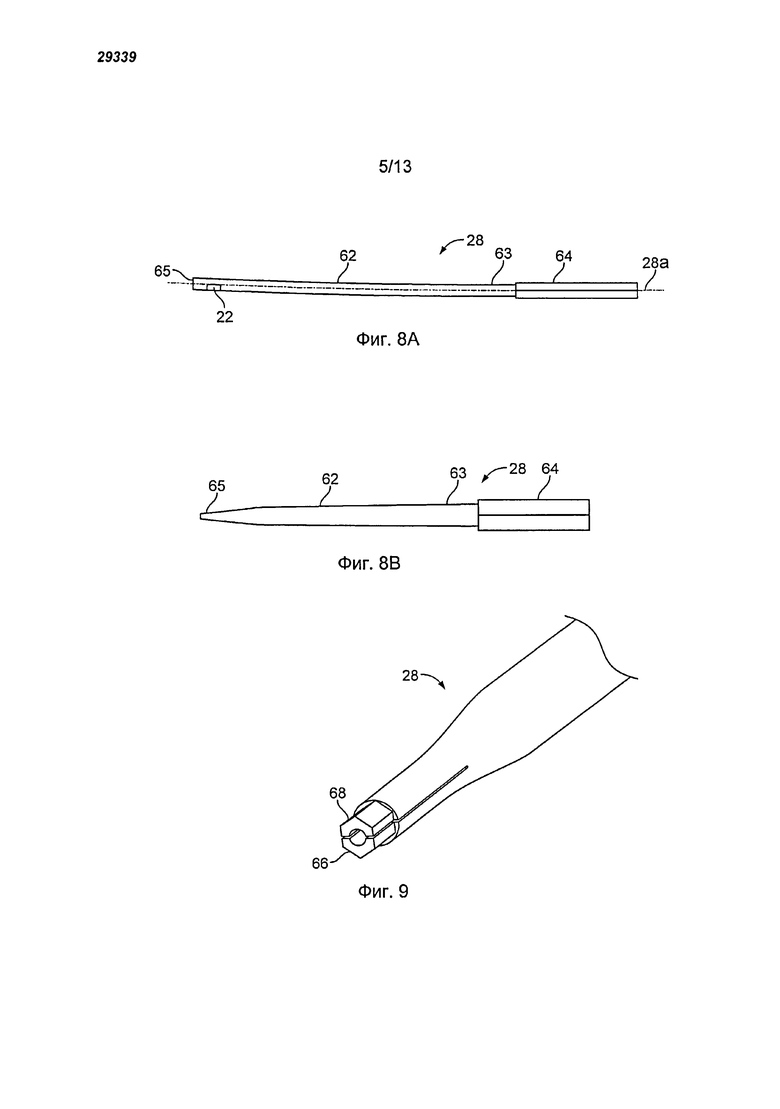
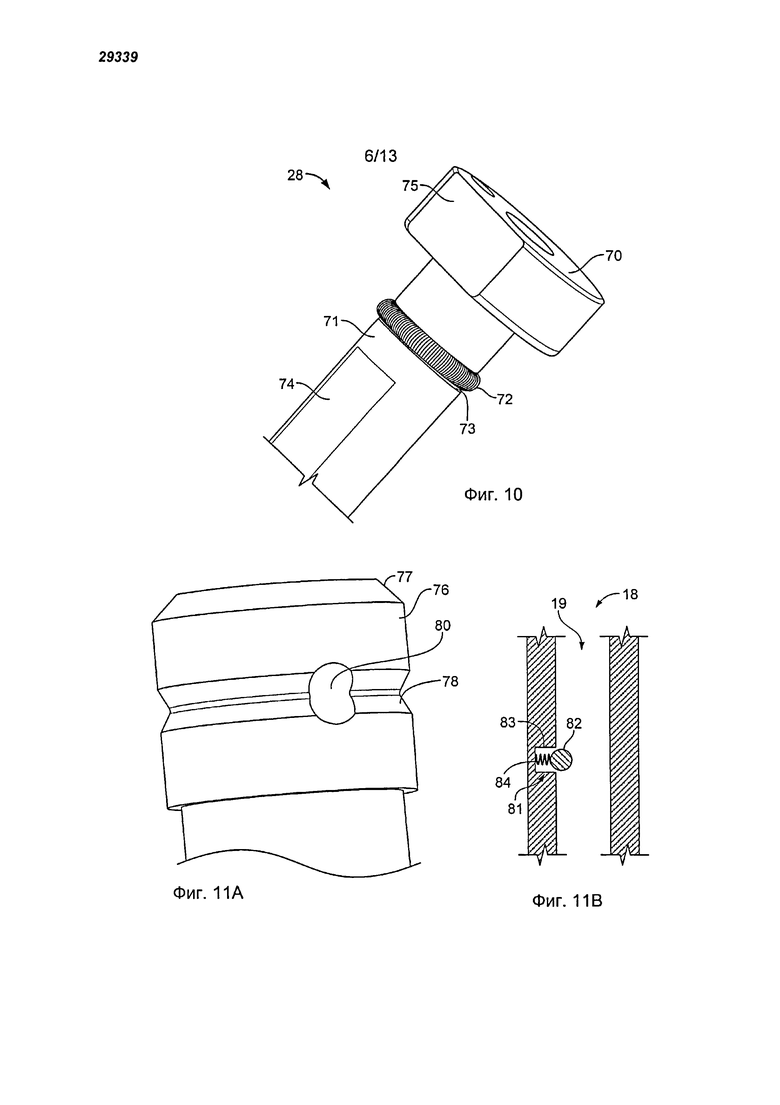
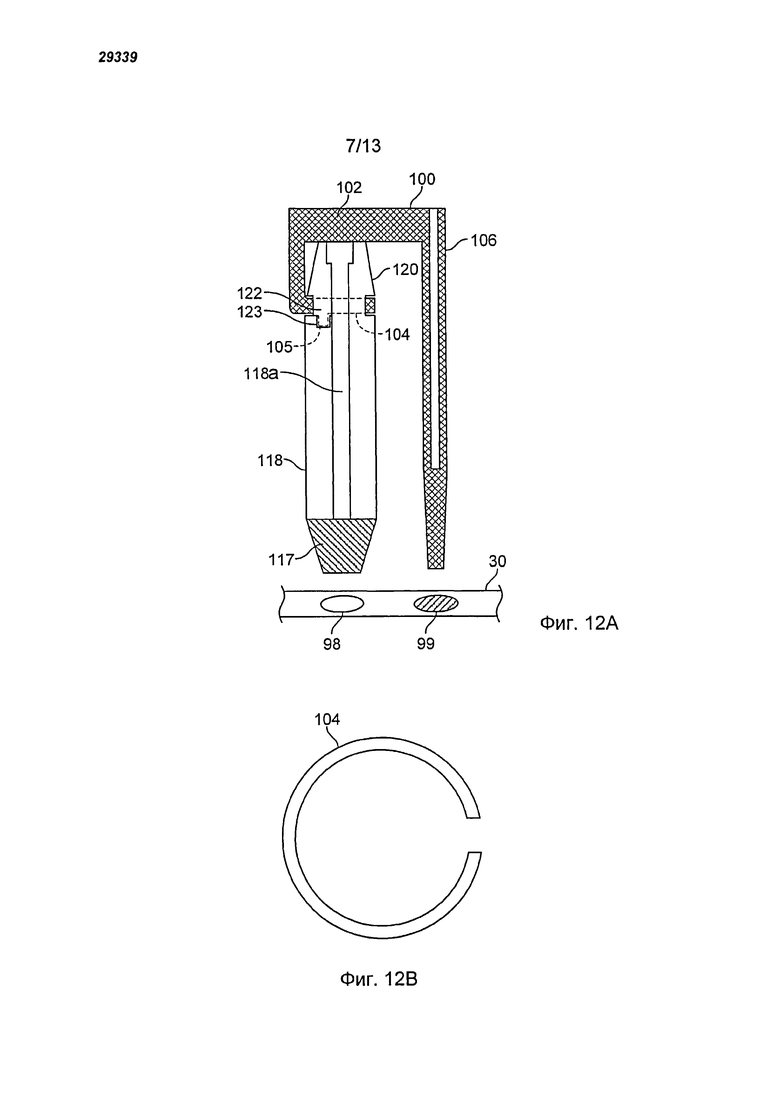
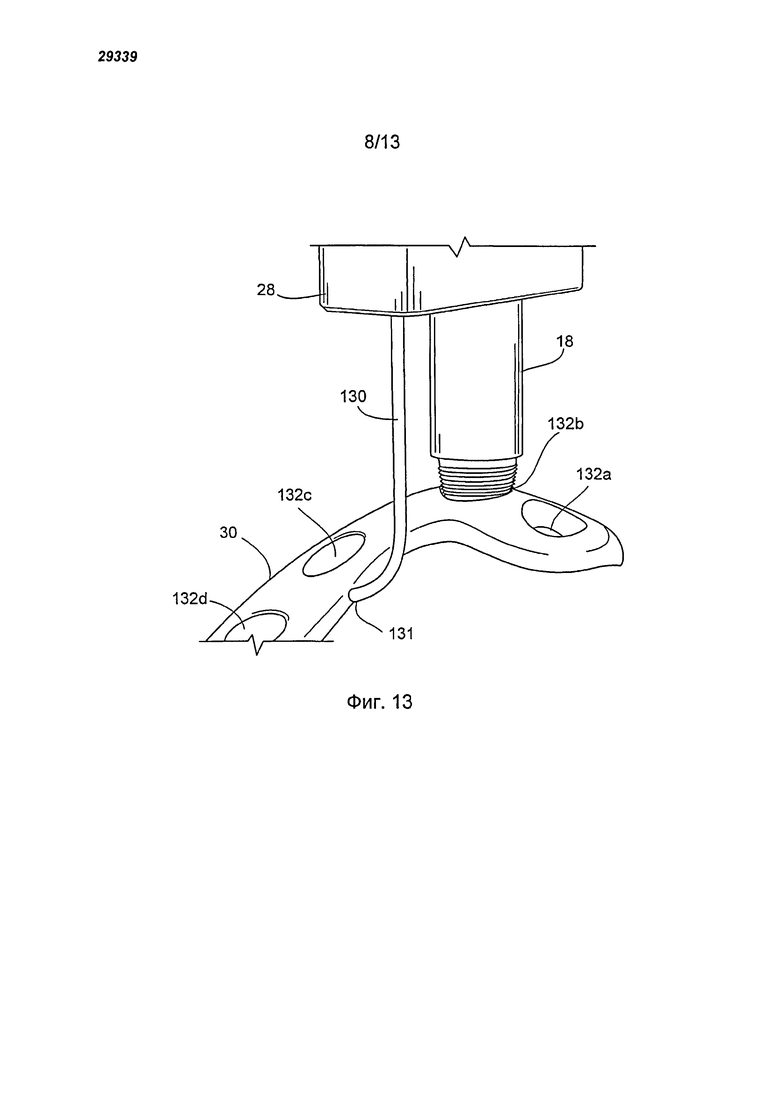
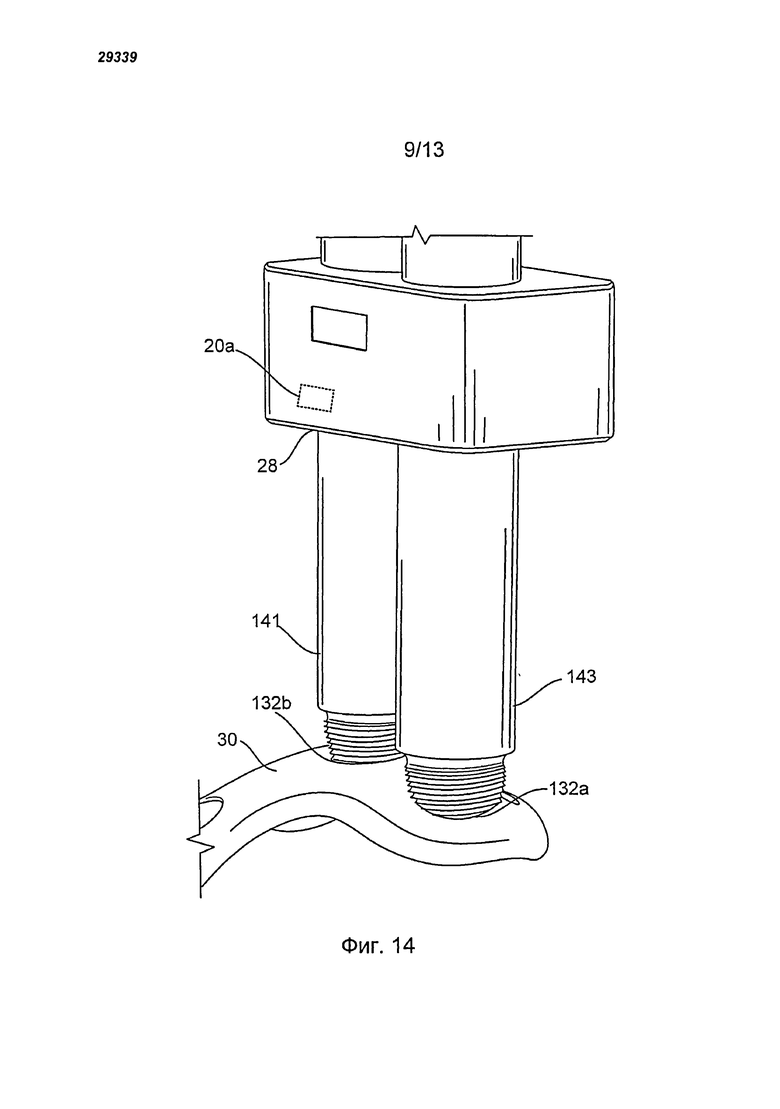
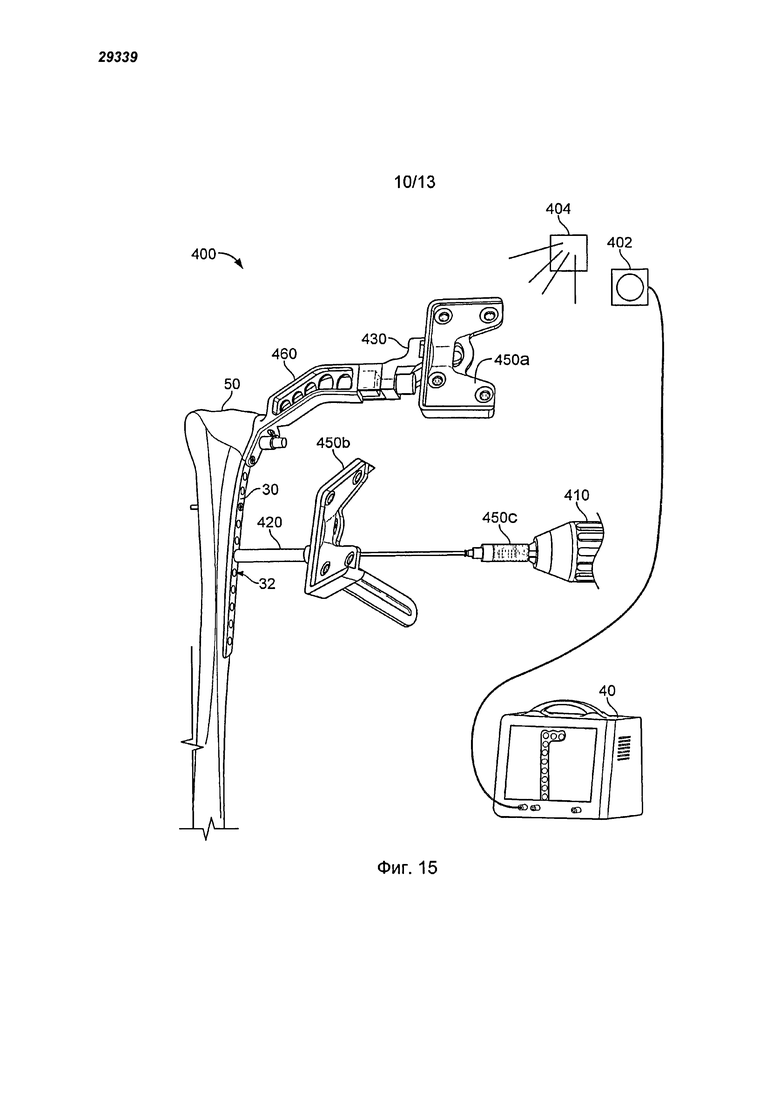

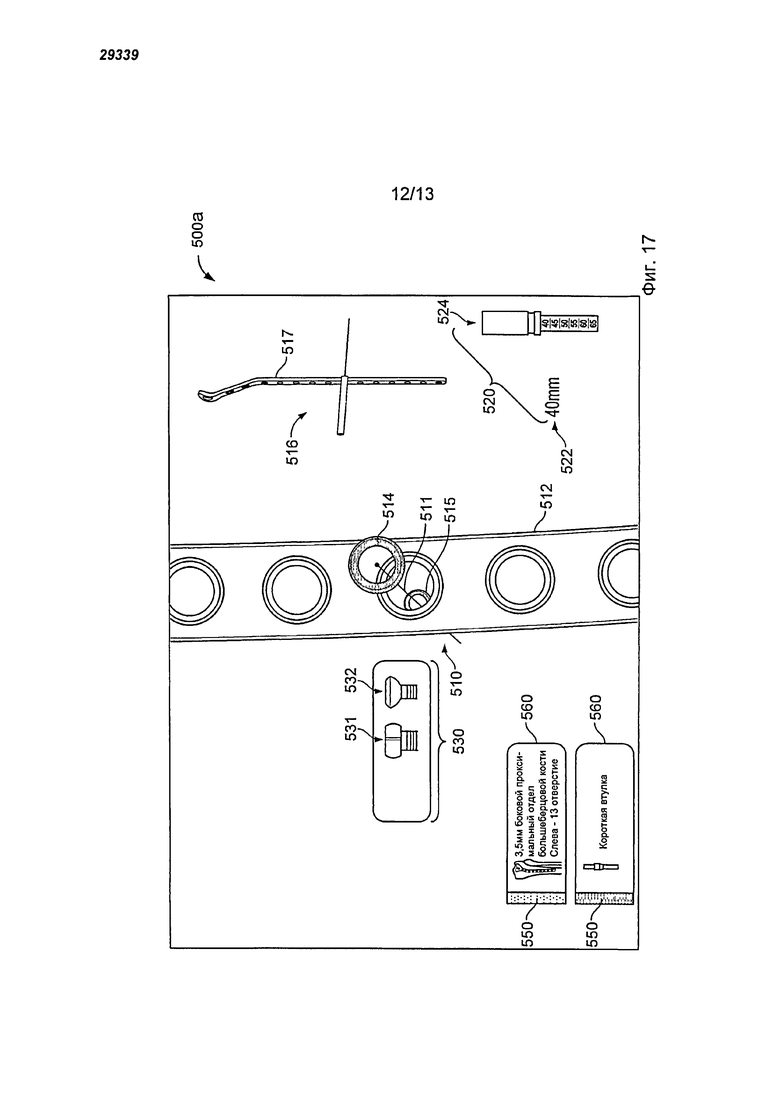
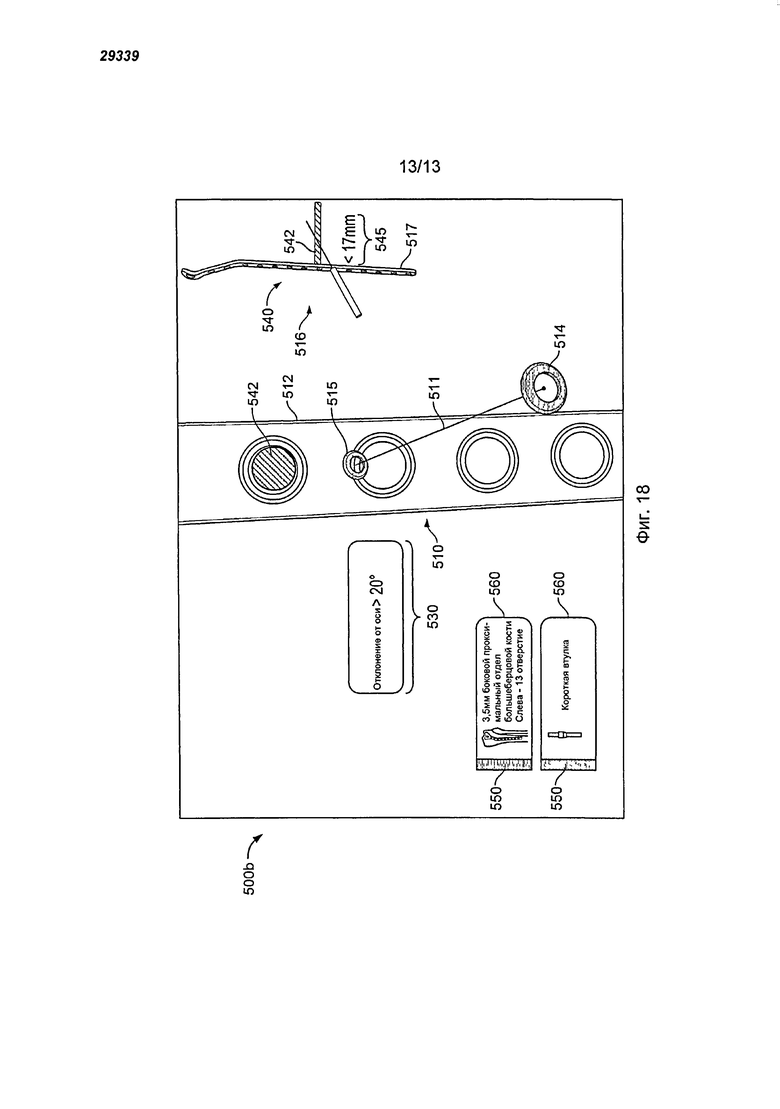
Группа изобретений относится к области медицины. Устройство для нацеливания на опознавательную точку ортопедического имплантата содержит: корпус, выполненный с возможностью ввода в зацепление с сопрягаемым конструктивным элементом для крепления корпуса к ортопедическому имплантату; и электромагнитный датчик, расположенный внутри корпуса устройства в известном положении. Причем, когда корпус устройства введен в зацепление с сопрягаемым конструктивным элементом, положение датчика относительно опознавательной точки ортопедического имплантата известно в отношении пяти степеней свободы. Способ нацеливания на опознавательную точку ортопедического устройства включает в себя следующие этапы: определение местоположения первой опознавательной точки ортопедического устройства с помощью устройства идентификации опознавательной точки и первого датчика электромагнитного поля, причем устройство идентификации опознавательной точки содержит генератор электромагнитного поля, а первый датчик электромагнитного поля при определении местоположения первой опознавательной точки прикреплен к ортопедическому устройству и находится в зоне действия генератора электромагнитного поля, при этом определение местоположения первой опознавательной точки включает передвижение устройства идентификации опознавательной точки относительно ортопедического устройства и первого датчика электромагнитного поля; прикрепление второго датчика электромагнитного поля к первой опознавательной точке; помещение второго датчика электромагнитного поля в зону действия; и определение местоположения второй опознавательной точки ортопедического устройства с использованием устройства идентификации опознавательной точки и второго датчика электромагнитного поля с использованием второго датчика электромагнитного поля, прикрепленного к первой опознавательной точке, при этом определение местоположения второй опознавательной точки включает передвижение устройства идентификации опознавательной точки относительно ортопедического устройства и второго датчика электромагнитного поля. Способ использования устройства содержит: ввод корпуса в зацепление с сопрягаемым конструктивным элементом, тем самым прикрепляя корпус к ортопедическому имплантату; генерирование электромагнитного поля; передвижение устройства идентификации опознавательной точки относительно ортопедического имплантата, тем самым передвигая электромагнитное поле относительно датчика; вычисление положения датчика относительно устройства идентификации опознавательной точки с использованием сигналов, принятых от датчика; и сравнение вычисленных положений датчика относительно устройства идентификации опознавательной точки с известным положением датчика относительно опознавательной точки. Применение данной группы изобретений позволит исключить воздействие вредного излучения на пациента и/или персонал при нацеливании на опознавательную точку имплантата, покрытую тканями. 4 н. и 21 з.п. ф-лы, 18 ил.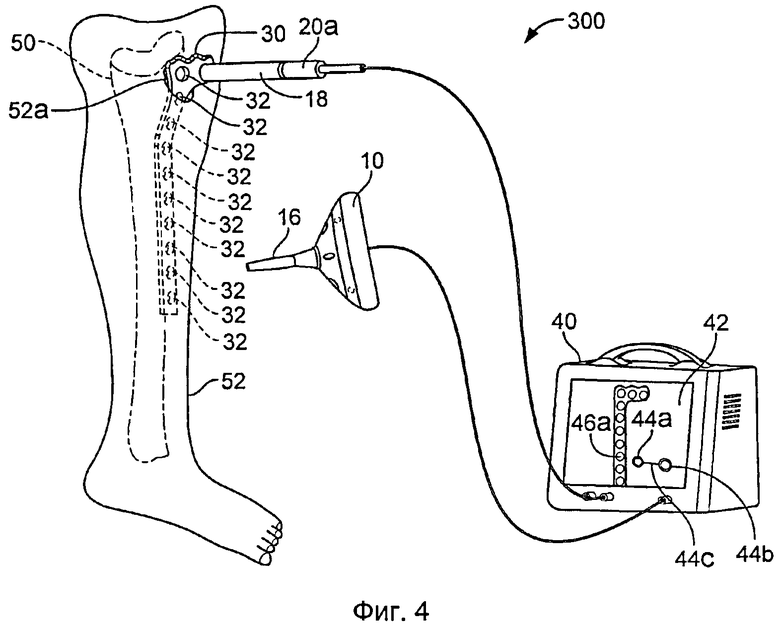
1. Устройство для нацеливания на опознавательную точку ортопедического имплантата, содержащее:
корпус, выполненный с возможностью ввода в зацепление с сопрягаемым конструктивным элементом для крепления указанного корпуса к ортопедическому имплантату; и
электромагнитный датчик, расположенный внутри указанного корпуса указанного устройства в известном положении,
отличающееся тем, что когда корпус указанного устройства введен в зацепление с сопрягаемым конструктивным элементом, положение датчика относительно опознавательной точки ортопедического имплантата известно по меньшей мере в отношении пяти степеней свободы.
2. Устройство по п. 1, отличающееся тем, что указанный корпус имеет одну по существу цилиндрическую внешнюю поверхность, содержащую захват и шариковый фиксатор для неподвижного крепления корпуса к имплантату.
3. Устройство по п. 1, отличающееся тем, что указанный корпус содержит расщепленный конец, выполненный с возможностью расширения для ввода в зацепление с сопрягаемым конструктивным элементом и неподвижного крепления корпуса к имплантату.
4. Устройство по п. 1, отличающееся тем, что указанный корпус имеет внешнюю поверхность, содержащую сжимаемую деталь, выполненную с возможностью ввода в зацепление с канавкой с целью неподвижного крепления корпуса к имплантату.
5. Устройство по п. 1, отличающееся тем, что указанный корпус содержит коническую внешнюю поверхность, предназначенную для ввода в зацепление с гнездом для неподвижного крепления корпуса к имплантату.
6. Устройство по п. 1, отличающееся тем, что указанный корпус задает центральную продольную ось, причем корпус изогнут вокруг указанной центральной продольной оси корпуса.
7. Устройство по п. 1, отличающееся тем, что указанный сопрягаемый конструктивный элемент содержит многоугольную внешнюю часть, и указанный корпус содержит комплементарную многоугольную часть для сопряжения с указанной многоугольной внешней частью.
8. Способ нацеливания на опознавательную точку ортопедического устройства, включающий в себя следующие этапы:
определение местоположения первой опознавательной точки ортопедического устройства с помощью устройства идентификации опознавательной точки и первого датчика электромагнитного поля, причем устройство идентификации опознавательной точки содержит генератор электромагнитного поля, а первый датчик электромагнитного поля при определении местоположения первой опознавательной точки прикреплен к ортопедическому устройству и находится в зоне действия генератора электромагнитного поля, при этом определение местоположения первой опознавательной точки включает передвижение устройства идентификации опознавательной точки относительно ортопедического устройства и первого датчика электромагнитного поля;
прикрепление второго датчика электромагнитного поля к первой опознавательной точке;
помещение второго датчика электромагнитного поля в зону действия; и
определение местоположения второй опознавательной точки ортопедического устройства с использованием устройства идентификации опознавательной точки и второго датчика электромагнитного поля с использованием второго датчика электромагнитного поля, прикрепленного к первой опознавательной точке, при этом определение местоположения второй опознавательной точки включает передвижение устройства идентификации опознавательной точки относительно ортопедического устройства и второго датчика электромагнитного поля.
9. Способ нацеливания на опознавательную точку ортопедического устройства, включающий в себя следующие этапы:
определение местоположения первой опознавательной точки ортопедического устройства с помощью устройства идентификации опознавательной точки и первого датчика электромагнитного поля, причем устройство идентификации опознавательной точки содержит генератор электромагнитного поля, а первый датчик электромагнитного поля при определении местоположения первой опознавательной точки находится в зоне действия генератора электромагнитного поля;
помещение второго датчика электромагнитного поля в зону действия; и
определение местоположения второй опознавательной точки ортопедического устройства с помощью устройства идентификации опознавательной точки и второго датчика электромагнитного поля;
при этом при определении местоположения второй опознавательной точки первый датчик электромагнитного поля находится вне зоны действия генератора электромагнитного поля.
10. Способ по п. 8, отличающийся тем, что ортопедическое устройство представляет собой костную пластину.
11. Способ по п. 8, отличающийся тем, что первая опознавательная точка представляет собой отверстие.
12. Способ по п. 11, отличающийся тем, что крепление второго датчика электромагнитного поля предусматривает получение доступа к отверстию и прикрепление второго датчика электромагнитного поля к ортопедическому устройству через указанное отверстие.
13. Способ по п. 12, отличающийся тем, что получение доступа к отверстию происходит при имплантации ортопедического устройства в тело пациента.
14. Способ по п. 10, отличающийся тем, что указанное отверстие представляет собой резьбовое отверстие, причем крепление второго датчика электромагнитного поля предусматривает ввод сверлильной втулки в зацепление с резьбовым отверстием и прикрепление второго датчика электромагнитного поля к сверлильной втулке.
15. Устройство по п. 1, в котором корпус дополнительно содержит две части, выполненные для введения в зацепление с двумя отдельными отверстиями.
16. Устройство по п. 1, в котором корпус содержит сверлильную втулку.
17. Устройство по п. 16, в котором корпус дополнительно содержит выступ, предназначенный для зацепления с ортопедическим имплантатом, когда корпус находится в зацеплении с сопрягаемым конструктивным элементом в предопределенной ориентации; и
при этом, когда корпус находится в зацеплении с сопрягаемым конструктивным элементом и выступ находится в зацеплении с ортопедическим имплантатом, положение датчика относительно опознавательной точки ортопедического имплантата дополнительно известно в отношении шестой степени свободы.
18. Устройство по п. 1, дополнительно содержащее блок управления, и при этом блок управления отображает угловое положение корпуса относительно ортопедического имплантата.
19. Устройство по п. 18, в котором блок управления сравнивает угловое положение с диапазоном приемлемых положений.
20. Способ использования устройства по п. 1, содержащий:
ввод корпуса в зацепление с сопрягаемым конструктивным элементом, тем самым прикрепляя корпус к ортопедическому имплантату так, что положение датчика относительно опознавательной точки известно по меньшей мере в отношении пяти степеней свободы;
генерирование электромагнитного поля посредством устройства идентификации опознавательной точки, включающего генератор электромагнитного поля;
передвижение устройства идентификации опознавательной точки относительно ортопедического имплантата, тем самым передвигая электромагнитное поле относительно датчика;
вычисление положения датчика относительно устройства идентификации опознавательной точки с использованием сигналов, принятых от датчика; и
сравнение вычисленных положений датчика относительно устройства идентификации опознавательной точки с известным положением датчика относительно опознавательной точки.
21. Способ по п. 8, в котором вторая опознавательная точка имеет известное положение относительно первой опознавательной точки, и при этом определение местоположения второй опознавательной точки включает:
передвижение устройства идентификации относительно ортопедического устройства;
определение положения устройства идентификации относительно второго датчика электромагнитного поля на основе информации, полученной от второго датчика электромагнитного поля; и
сравнение положения устройства идентификации опознавательной точки относительно второго датчика электромагнитного поля с известным положением второй опознавательной точки относительно первой опознавательной точки.
22. Способ по п. 21, в котором первая опознавательная точка имеет известное положение относительно первого датчика электромагнитного поля, и при этом определение местоположения первой опознавательной точки включает:
передвижение устройства идентификации опознавательной точки относительно ортопедического устройства;
определение положения устройства идентификации опознавательной точки относительно первого датчика электромагнитного поля на основе информации, полученной от первого датчика электромагнитного поля; и
сравнение положения устройства идентификации опознавательной точки относительно первого датчика электромагнитного поля с известным положением первой опознавательной точки относительно первого датчика электромагнитного поля.
23. Способ по п. 8, в котором при определении местоположения второй опознавательной точки первый датчик электромагнитного поля находится вне зоны действия генератора электромагнитного поля.
24. Устройство по п. 1, в котором, когда корпус введен в зацепление с сопрягаемым конструктивным элементом, положение датчика относительно опознавательной точки ортопедического имплантата известно по меньшей мере в отношении пяти степеней свободы на основе известного взаимного расположения между датчиком и опознавательной точкой, когда корпус прикреплен к ортопедическому имплантату посредством сопрягаемого конструктивного элемента.
25. Устройство по п. 1, дополнительно содержащее блок управления, выполненный с возможностью получения информации о положении, относящейся к известному взаимному расположению между датчиком и опознавательной точкой, информация указывает относительные положения датчика и опознавательной точки, когда корпус прикреплен к ортопедическому имплантату посредством сопрягаемого конструктивного элемента; при этом, когда корпус введен в зацепление с сопрягаемым конструктивным элементом, положение датчика относительно опознавательной точки известно по меньшей мере в отношении пяти степеней свободы на основе указанной информации о положении.
| US 2010274121 A1, 28.10.2010 | |||
| US 2008281326 A1, 13.11.2008 | |||
| US 6503249 B1, 07.01.2003 | |||
| US 7727240 B1, 01.06.2010 | |||
| Станок для очистки коконов от сдира | 1952 |
|
SU98901A1 |

