Перекрестные ссылки на связанные заявки
[0001] По данной заявке испрашивается приоритет предварительной заявки США 61/173,069, поданной 27 апреля 2009 года, содержание которой включено целиком в данное описание в качестве ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники:
[0002] Данное описание относится к определению местоположения скрытых рельефных ориентиров на ортопедических имплантатах.
Описание уровня техники:
[0003] Блокирующий стержень значительно расширил возможности для интрамедуллярного остеосинтеза (ИО) при переломах длинных костей. Закрепление стержня ИО на кости делает конструкцию более стабильной в продольном направлении и предотвращает вращение стержня в кости. Обычная операция крепления стержня ИО сочетает использование опорных пластин, рентгенографических исследований и ручного "визуального обследования" для определения положения и сверления дистальных винтовых отверстий и установки винтов в винтовых отверстиях.
[0004] При операции фиксации стержня ИО, стержень вставляют в канал сломанной длинной кости для того, чтобы зафиксировать сломанные концы вместе. Обычно вначале выполняют проксимальную блокировку, и она обычно выполняется с помощью опорной пластины. Однако деформация стержня во время установки при интрамедуллярном остеосинтезе может привести к тому, что опорная пластина будет обеспечивать недостаточную точность для дистальных винтов. Действительно, определение положения дистальных блокирующих винтов и выравнивание сверла для сверления дистальных винтовых отверстий является самым трудоемким и затруднительным этапом процедуры имплантации. Двумя основными причинами неэффективности дистальной блокировки являются (1) неправильная точка входа на кости и (2) неправильная ориентация сверла. Если возникает одна из этих проблем, то сверло не пройдет через стержневое отверстие. Неправильное положение точки входа усугубляет проблему, поскольку скругленный кончик головки сверла часто соскальзывает, повреждая здоровую кость, в результате чего усложняется размещение другого отверстия вблизи ошибочного отверстия. Неточная дистальная блокировка может привести к преждевременному нарушению с прорывом стержня через стержневое отверстие, поломке винта или поломке режущей части сверла в кости.
[0005] Ручная технология является самой распространенной и общепринятой технологией нахождения дистальных винтовых отверстий. Большинство ручных дистальных технологий позиционирования применяют направляющую втулку или цилиндрическую муфту, которые направляют сверло. Механизмы выравнивания направляющей втулки и удержания ее на месте различны. В некоторых случаях хирург использует направляющую втулку, разрезанную пополам в продольном направлении, или целиком, для обеспечения устойчивости головки сверла. В обоих случаях хирург выполняет надрез и вводит сверло через разрез. Ручные технологии основаны, в первую очередь, на мастерстве хирурга и используют радиографическую рентгенографию и механические приспособления.
[0006] Другим способом реализации этого на длинных стержнях является применение технологии, называемой "совершенные окружности" с использованием С-образного рычага. При этом пациент и С-образный рычаг ориентированы таким образом, что при наблюдении имплантата флюроскопическим образом отверстие, через которое должен пройти винт, выглядит в форме окружности. Если С-образный рычаг не расположен перпендикулярно отверстию, то кажется, что отверстие имеет удлиненную форму или его вообще не видно.
[0007] Существует потребность в улучшении системы и способа точного и надежного обнаружения рельефных ориентиров для медицинских имплантатов. Кроме того, существует потребность в обеспечении точного размещения дистальных блокирующих винтов и выравнивания сверла при высверливании дистальных винтовых отверстий. Помимо этого, существует потребность улучшения системы обнаружения рельефных ориентиров, компоненты которой могут быть легко стерилизованы или подвергнуты обработке в автоклаве и использованы повторно.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] В общем виде, система определения местоположения рельефных ориентиров включает в себя генератор поля для генерации электромагнитного поля и определитель рельефных ориентиров. Генератор поля и определитель рельефных ориентиров расположены в общем корпусе, и генератор поля, определитель рельефных ориентиров и общий корпус выполнены с возможностью обработки в автоклаве. Система также включает в себя ортопедический имплантат, расположенный в электромагнитном поле, причем ортопедический имплантат содержит по меньшей мере один рельефный ориентир. Первый магнитный датчик расположен на определенном расстоянии от по меньшей мере одного рельефного ориентира, и процессор сравнивает показания первого датчика и определителя рельефного ориентира и использует указанное определенное расстояния для вычисления местоположения определителя рельефного ориентира относительно по меньшей мере одного рельефного ориентира.
[0009] Варианты исполнения могут иметь один или более из следующих признаков. Например, рельефные ориентиры выбирают из группы, состоящей из структуры, отверстия, полости, выступа, канала, фиксатора, фланца, канавки, элемента, среза, ступени, отверстия, просверленного отверстия, углубления, лунки, протока, зазора, выемки, окна, прохода, щели и прорези. Ортопедический имплантат может представлять собой интрамедуллярный стержень. Ортопедический имплантат имеет внешнюю поверхность и внутреннюю поверхность, образующие канюляцию, и в дистальный участок зонда установлен первый датчик, проходящий в канюляцию, Обычный корпус некоторых вариантов также содержит мотор вращения сверла, выполненный с возможностью подсоединения к головке сверла. Корпус может содержать обойму сверла. Корпус может быть выполнен в форме диска. Сверло выступает наружу перпендикулярно корпусу в форме диска. Система также может содержать вставную рукоятку, присоединенную с возможностью отсоединения к ортопедическому имплантату. К имплантату может быть подсоединен регулируемый стопор, содержащий щель, сквозь которую проходит зонд. Регулируемый стопор содержит зажимное приспособление для удержания зонда в фиксированном положении. Зонд может содержать несколько отстоящих на расстоянии друг от друга меток, и регулируемый стопор содержит зажимное приспособление для удержания зонда в фиксированном положении на метке или между метками.
[0010] В другом общем аспекте обнаружение местоположения рельефного ориентира включает в себя шаги: берут систему ортопедического имплантата, имеющего по меньшей мере один рельефный ориентир, имплантируют в пациента систему ортопедического имплантата и размещают зонд в имплантате. Зонд содержит электромагнитный датчик. Обнаружение местоположения рельефного ориентира может дополнительно включать шаги: генерируют электромагнитное поле, охватывающее датчик и рельефный ориентир, определяют местоположения указанного по меньшей мере одного рельефного ориентира посредством определителя рельефного ориентира, устанавливают трансфиксационный элемент в по меньшей мере одном рельефном ориентире и удаляют зонд. Определитель рельефного ориентира расположен в корпусе, выполненном с возможность обработки в автоклаве.
[0011] Варианты исполнения могут иметь один или более из следующих признаков. Например, рельефные ориентиры выбирают из группы, состоящей из структуры, отверстия, полости, выступа, канала, фиксатора, фланца, канавки, элемента, среза, ступени, отверстия, просверленного отверстия, углубления, лунки, протока, проема, выемки, окна, прохода, щели и прорези. Ортопедический имплантат может представлять собой интрамедуллярный стержень. Ортопедический имплантат имеет внешнюю поверхность и внутреннюю поверхность, образующие канюляцию, а определение местоположения рельефного ориентира дополнительно включает установку первого датчика в дистальный участок зонда, проходящего в канюляцию, Генератор поля и определитель рельефного ориентира расположены в общем корпусе, выполненном с возможность обработки в автоклаве, и определение местоположения рельефного ориентира также включает обработку корпуса в автоклаве. Генератор поля и определитель рельефного ориентира расположены в общем корпусе, выполненном с возможность обработки в автоклаве, который также может содержать мотор вращения сверла, причем мотор вращения сверла соединен с головкой сверла, и определение местоположения рельефного ориентира дополнительно включает обработку в автоклаве корпуса и сверла. Корпус может содержать обойму сверла. Корпус может быть выполнен в форме диска. Определение местоположения рельефного ориентира также включает подсоединение вставной рукоятки к ортопедическому имплантату с возможностью отсоединения и/или закрепление зонда в фиксированном положении. Зонд содержит несколько отстоящих на расстоянии друг от друга меток, и зонд закреплен в фиксированном положении на метке или между метками.
[0012] В другом общем аспекте система обнаружения рельефных ориентиров содержит корпус, выполненный с возможностью обработки в автоклаве, содержащий генератор поля для генерации электромагнитного поля, определитель рельефных ориентиров и двигатель вращения сверла. Ортопедический имплантат расположен в электромагнитном поле, и ортопедический имплантат имеет по меньшей мере один рельефный ориентир. Зонд содержит первый электромагнитный датчик, и он расположен в пределах ортопедического имплантата и отстоит на определенном расстоянии от по меньшей мере одного рельефного ориентира. Также предусмотрен процессор, предназначенный для сравнения показаний, поступающих от первого датчика и от определителя рельефного ориентира и для использования указанного определенного расстояния для вычисления положения определителя рельефного ориентира относительно по меньшей мере одного рельефного ориентира. Первый электромагнитный датчик подсоединен к процессору через зонд.
[0013] В другом общем аспекте приспособление для обнаружения рельефных ориентиров на медицинских имплантатах содержит корпус, выполненный с возможностью обработки в автоклаве, содержащий генератор поля для генерации электромагнитного поля и определитель рельефных ориентиров. Также предусмотрено несколько ортопедических имплантатов, один из которых расположен внутри электромагнитного поля. Каждый ортопедический имплантат содержит по меньшей мере один рельефный ориентир. Предусмотрено несколько зондов, каждый из которых содержит электромагнитный датчик. Один из зондов выбирают в зависимости от размера имплантата, расположенного в электромагнитном поле. Выбранный зонд располагают в пределах имплантата в электромагнитном поле на определенном расстоянии от по меньшей мере одного рельефного ориентира. Предусмотрен процессор, предназначенный для сравнения показаний, поступающих от первого датчика и от определителя рельефного ориентира, и для использования указанного определенного расстояния для вычисления положения определителя рельефного ориентира относительно по меньшей мере одного рельефного ориентира, причем первый электромагнитный датчик подсоединен к процессору посредством зонда.
[0014] В другом общем аспекте система для определения положения рельефного ориентира ортопедического имплантата содержит корпус, выполненный с возможность обработки в автоклаве, генератор поля, расположенный в корпусе, для генерации электромагнитного поля, первый электромагнитный датчик для расположения на определенном расстоянии от рельефного ориентира, генерирующий показания датчика в ответ на генерированное электромагнитное поле, и элемент, соединенный с корпусом с возможностью отсоединения, причем элемент задает продольную ось, представляющую одну ось генерированного магнитного поля. Система выполнена с возможностью использования указанной одной оси генерированного электромагнитного поля для определения положения элемента относительно рельефного ориентира.
[0015] Варианты исполнения могут иметь один или более из следующих признаков. Например, система может содержать первый зонд, имеющий проксимальный участок и дистальный участок, причем первый электромагнитный датчик расположен на дистальном участке зонда, зонд, выполненный с возможностью втягивания, содержащий первый электромагнитный датчик, или зонд, выполненный с возможностью втягивания, содержащий первый электромагнитный датчик и корпус, способный вместить по меньшей мере часть выполненного с возможностью втягивания зонда. Также может быть предусмотрен второй электромагнитный датчик, расположенный на проксимальном участке первого зонда. Система может содержать второй зонд, имеющий проксимальный и дистальный участок, и третий электромагнитный датчик, расположенный на дистальном конце второго зонда, причем второй зонд длиннее первого зонда. Система также может содержать процессор для сравнения показаний, поступающих от первого электромагнитного датчика и от указанного элемента, и использующий указанное определенное расстояние для вычисления положения элемента относительно рельефного ориентира. Система может содержать регулируемый стопор, выполненный с возможностью соединения с ортопедическим имлантатом. Регулируемый стопор может содержать прорезь, через которую проходит первый или второй зонд, и зажимное приспособление для удержания первого или второго зонда в фиксированном положении. Первый и второй зонд могут содержать несколько разнесенных между собой отметок так, что зажимное приспособление может быть выборочно установлен для удержания первого или второго зонда в фиксированном положении около одной отметки или между отметками. К ортопедическому имплантату может быть присоединена ручка с возможностью отсоединения. Выполненный с возможностью обработки в автоклаве корпус может иметь форму диска. Указанный элемент может содержать одно из следующего: направляющую сверла, обойму сверла, сверло, носик сверла, зажимной патрон сверла или фиксирующий элемент. Ортопедический имплантат может содержать одно из следующего: интрамедуллярный стержень, костную пластину, бедренный протез, коленный протез, позвоночный протез и плечевой протез. Первый или второй зонд перед помещением в ортопедический имплантат может быть свернут в кольцо или согнут. Первый электромагнитный датчик содержит проксимальный конец и дистальный конец. Дистальный конец первого электромагнитного датчика соединен с проксимальным концом ортопедического имплантата так, что первый электромагнитный датчик находится на определенном расстоянии от по меньшей мере одного рельефного ориентира, расположенной в проксимальной области ортопедического имплантата. По меньшей мере корпус и указанный элемент выполнены с возможностью повторного использования. Корпус выполнен из одного из следующих материалов: керамики, силикона, полипропилена (ПП), поликарбоната (ПК), полиметилпентена (ПМП), ПТФЭ смолы или полиметилметакрилата (ПММА или акрилового полимера).
[0016] В другом общем аспекте аппарат для определения положения рельефного ориентира ортопедического имплантата содержит вставную рукоятку, прикрепленную с возможностью отсоединения к ортопедическому имплантату, регулируемый стопор, содержащий привод, и зонд, содержащий датчик и несколько меток, способствующих размещению зонда и датчика в требуемом положении относительно ортопедического имплантата.
[0017] Варианты исполнения могут иметь один или более из следующих признаков. Например, регулируемый стопор содержит стыковочный участок так, что когда стопор присоединен к вставной рукоятке, стопор расположен или фиксирован с тремя степенями свободы. Вставная рукоятка присоединена к ортопедическому имплантату посредством использования канюлированного болта.
[0018] В другом общем аспекте приспособление для определения местоположения рельефного ориентира ортопедического имплантата содержит проксимальный прицельный зонд, содержащий ленточную основу, и датчик, содержащийся внутри или на ленточной основе на заданном расстоянии от точки отсчета ленточной основы. Проксимальный прицельный зонд содержит первый индикатор, указывающий, что проксимальный прицельный зонд должен быть использован для определения местоположения проксимальных рельефных ориентиров ортопедического имплантата. Приспособление также содержит дистальный прицельный зонд, содержащий ленточную основу, более длинную, чем ленточная основа проксимального прицельного зонда, а датчик содержится внутри или на ленточной основе дистального прицельного зонда на втором заданном расстоянии от второго начала отсчета искомого тела дистального прицельного зонда. Дистальный прицельный зонд содержит второй индикатор, указывающий, что дистальный прицельный зонд должен быть использован для определения местоположения дистальных рельефных ориентиров ортопедического имплантата.
[0019] Варианты исполнения могут иметь один или более из следующих признаков. Например, первый индикатор содержит захват с цветовой маркировкой, а второй индикатор содержит захват с цветовой маркировкой, цвет которого отличен от цвета первого индикатора. Первый индикатор содержит захват с цветовой маркировкой, а второй индикатор содержит захват с цветовой маркировкой, цвет которого отличен от цвета первого индикатора. Проксимальный прицельный зонд содержит кабель для передачи сигнала от датчика, содержащегося внутри или на ленточной основе проксимального прицельного зонда, к контрольному модулю, а дистальный прицельный зонд содержит второй кабель для передачи сигнала от датчика, содержащегося внутри или на ленточной основе дистального прицельного зонда, к контрольному модулю. Датчики, содержащиеся внутри или на ленточной основе проксимального или дистального прицельных зондов, подсоединены к одному или более микрочипу программируемого ПЗУ, который определяет, используются ли Проксимальный и дистальный прицельный зонды для проксимального или дистального определения местоположения. Ленточные основы проксимального или дистального прицельных зондов содержат один или более изгиб для смещения, по меньшей мере частичного, ленточных основ относительно стенки ортопедического имплантата.
[0020] В другом общем аспекте зонд, используемый для определения местоположения рельефного ориентира ортопедического имплантата, содержит корпус и тело, выполненное с возможностью втягивания или выдвижения, расположенное в корпусе. Тело выполнено таким образом, что оно имеет по существу прямую форму при выдвижении из корпуса. Датчик расположен в корпусе и выполнен с возможностью размещения в первом положении для определения местоположения проксимального рельефного ориентира ортопедического имплантата. Датчик выполнен с возможностью размещения во втором положении для определения местоположения дистального рельефного ориентира ортопедического имплантата. Тело содержит одно из следующего: слоистые гибкие стальные пружинные ленты, эластичный пластик или резиновые рукава или пластины. Тело содержит несколько вмонтированных трубчатых сегментов, которые могут выдвигаться или втягиваться посредством скольжения внутри прилегающих трубчатых сегментов.
[0021] В другом общем аспекте устройство для определения местоположения рельефных ориентиров, расположенных на проксимальном конце ортопедического имплантата, содержит вставную рукоятку и датчик, расположенный внутри или на вставной рукоятке на заданном расстоянии от проксимального фиксирующего отверстия, образующегося в ортопедическом имплантате при прикреплении вставной рукоятки к ортопедическому имплантату. Датчик является пассивным или запитан электричеством. Датчик установлен в корпусе, который объединен или составляет единое целое с вставной рукояткой.
[0022] Раскрытые способы и устройства содержат различные усовершенствования. Во-первых, раскрытые способы и устройства могут быть реализованы независимо от флюороскопии и устраняют необходимость использования рентгенографических устройств для определения местоположения трансфиксационных элементов, тем самым снижая воздействие радиации на пользователей и пациентов. Во-вторых, раскрытые способы и устройства позволяют пользователям заблокировать ведущий конец имплантата раньше, чем не ведущий конец имплантата. Другими словами, раскрытые способы и устройства не требуют использования канюляции имплантата, при которой проксимальная фиксация должна быть выполнена до дистальной фиксации.
[0023] Другие преимущества и признаки будут понятны из последующего подробного описания, ссылки в котором относятся к прилагаемым чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] Фиг.1 иллюстрирует систему для определения местоположения рельефного ориентира.
[0025] Фиг.2 - вид в сечении ортопедического имплантата фиг.1.
[0026] Фиг.3 - часть вида в сечении имплантата по фиг.1 и 2, иллюстрирующего установку датчика.
[0027] Фиг.4 - часть вида в сечении другого варианта установки датчика в имплантате.
[0028] Фиг.5 - вид в сечении датчика и имплантата, представленного на фиг.4.
[0029] Фиг.6 иллюстрирует другую конструкцию ортопедического имплантата.
[0030] Фиг.7 - частичный вид сбоку съемного устройства ввода.
[0031] Фиг.8 - вид сверху конструкции ортопедического имплантата, представленной на фиг.6.
[0032] Фиг.9 иллюстрирует определитель рельефного ориентира, содержащий обойму сверла.
[0033] Фиг.10 - частичный вид и вид в сечении, иллюстрирующий двухточечные контакты имплантата.
[0034] Фиг.11 - другой частичный вид в сечении, иллюстрирующий двухточечные контакты другого имплантата.
[0035] Фиг.12А - частичный вид и вид в сечении имплантата, иллюстрирующий обжимное электрическое соединение.
[0036] Фиг.12В - частичное изображение в разобранном виде, иллюстрирующее электрическое соединение в имплантате согласно изобретению.
[0037] Фиг.12С - вид сбоку электрического соединения, представленного на фиг.12В.
[0038] Фиг.12D - частичное изображение в разобранном виде, иллюстрирующее электрическое соединение в другом имплантате согласно изобретению.
[0039] Фиг.13А - частичное аксонометрическое изображение и изображение в разобранном виде, иллюстрирующие альтернативный вариант механизма выравнивания ортопедического имплантата и вставной рукоятки согласно изобретению.
[0040] Фиг.13В - частичное аксонометрическое изображение и изображение в разобранном виде, иллюстрирующие альтернативный вариант механизма выравнивания ортопедического имплантата согласно изобретению и электрического соединения.
[0041] Фиг.14 - частичный вид сбоку, иллюстрирующий соединение вставной рукоятки с ортопедическим имплантатом.
[0042] Фиг.15 иллюстрирует другую систему для определения местоположения рельефного ориентира.
[0043] Фиг.16 - схематическая иллюстрация критериев выбора вида.
[0044] Фиг.17 - блок-схема, иллюстрирующая выбор вида во время операции фиксации.
[0045] Фиг.18 - схематическая иллюстрация другого способа выравнивания определителя рельефного ориентира.
[0046] Фиг.19 - схематическая иллюстрация другого способа выравнивания определителя рельефного ориентира согласно изобретению.
[0047] Фиг.20 иллюстрирует монитор согласно изобретению с примерами видов.
[0048] Фиг.21 иллюстрирует другой определитель рельефного ориентира согласно изобретению.
[0049] Фиг.22 - частичный вид другой вставной рукоятки согласно изобретению.
[0050] Фиг.23 иллюстрирует другую систему для определения местоположения рельефного ориентира согласно изобретению.
[0051] Фиг.24 - частичный вид еще одной вставной рукоятки согласно изобретению.
[0052] Фиг.25 иллюстрирует другую систему для определения местоположения рельефного ориентира согласно изобретению.
[0053] Фиг.26 - часть вида в сечении интрамедуллярного стержня.
[0054] Фиг.27 иллюстрирует упаковку имплантата согласно изобретению.
[0055] Фиг.28 иллюстрирует способ соединения системы определителя рельефного ориентира к сети.
[0056] Фиг.29 иллюстрирует еще одну систему для определения местоположения рельефного ориентира согласно изобретению.
[0057] Фиг.30 - блок-схема использования системы для определения местоположения рельефного ориентира согласно изобретению.
[0058] Фиг.31 - другая блок-схема использования системы для определения местоположения рельефного ориентира согласно изобретению.
[0059] Фиг.32 - схематическая иллюстрация отслеживания глубины сверла.
[0060] Фиг.33А и 33 В также представляют собой схематические иллюстрации отслеживания глубины сверла.
[0061] Фиг.34 - частичная иллюстрация устройства согласно изобретению для отслеживания глубины сверла.
[0062] Фиг.35 - аксонометрическое изображение другой вставной рукоятки.
[0063] Фиг.36 - аксонометрическое изображение сверху регулируемого стопора.
[0064] Фиг.37 - аксонометрическое изображение снизу регулируемого стопора представленного на фиг.36.
[0065] Фиг.38 - еще одна иллюстрация калибровки системы.
[0066] Фиг.39 - аксонометрическое изображение другого определителя рельефного ориентира, заключающего в себе генератор поля и обойму сверла, и который может быть стерилизован или подвергнут процедуре обработки в автоклаве.
[0067] Фиг.40 - вид сбоку определителя рельефного ориентира/генератора поля/обоймы сверла по фиг.39, осуществляющих контакт с костью.
[0068] Фиг.41 - аксонометрическое изображение определителя рельефного ориентира/генератора поля/выполненного с возможностью обработки в автоклаве корпуса фиг.39, соединенного с принадлежностью отвертки.
[0069] Фиг.42 - вид сбоку вставной рукоятки, регулируемого стопора и зонда.
[0070] Фиг.43 - аксонометрическое изображение примера регулируемого стопора, удерживающего зонд в требуемом положении.
[0071] Фиг.44 - аксонометрическое изображение другого примера регулируемого стопора.
[0072] Фиг.45 - аксонометрическое изображение интрамедуллярного стержня, вставной рукоятки, регулируемого стопора и зонда.
[0073] Фиг.46 - аксонометрическое изображение другого варианта интрамедуллярного стержня, вставной рукоятки, регулируемого стопора и зонда.
[0074] Фиг.47 - аксонометрическое изображение двух зондов для использования при определении местоположения рельефных ориентиров имплантата.
[0075] Фиг.48 - аксонометрическое изображение другого варианта зонда для использования при определении местоположения рельефных ориентиров имплантата.
[0076] Фиг.49 - вид в сечении зонда, выполненного с возможностью втягивания.
[0077] Фиг.50 - аксонометрическое изображение интрамедуллярного стержня, вставной рукоятки и регулируемого стопора.
[0078] Фиг.51 - иллюстрация системы для определения местоположения рельефного ориентира имплантата.
[0079] Фиг.52 - иллюстрация устройства для использования при калибровке системы фиг.51.
[0080] На фиг.53-62 представлены иллюстрации регулируемых стопоров.
[0081] Следует понимать, что масштаб в чертежах не всегда соблюден, и что описанные варианты реализации иногда проиллюстрированы схематично и частичным образом. В некоторых случаях детали, которые являются не обязательными для раскрытия изобретения или которые мешают восприятию других деталей, могут быть опущены. Следует, конечно, понимать, что данное описание не ограничено конкретными вариантами реализации, проиллюстрированными в нем.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0082] Ссылаясь на прилагаемые чертежи, на которых одинаковые номера позиций соответствуют одинаковым элементам, фиг.1 иллюстрирует одну систему 10 для определения местоположения рельефного ориентира согласно изобретению. Система 10 может содержать процессор 12, генератор 16 магнитного поля, определитель 18 рельефного ориентира и сборку 28 ортопедического имплантата. Система 10 может также включать монитор 14, соединенный электрическим образом с процессором 12, и вставную рукоятку 40, прикрепленную с возможностью отсоединения к сборке 28 ортопедического имплантата. Процессор 12 изображен в виде стационарного компьютера на фиг.1, но могут быть использованы и другие типы компьютерных устройств. Например, процессор 12 может быть стационарным компьютером, портативным компьютером, карманным персональным компьютером (КПК), мобильным переносным устройством или специально предназначенным устройством. Генератор 16 магнитного поля является устройством, поставляемым компанией Ascension Technology Corporation, расположенной по адресу 107 Catamount Drive, Milton Vermont, U.S.A.; компанией Northern Digital Inc. по адресу 103 Randall Drive, Waterloo, Ontario, Canada; или компанией Polhemus, расположенной по адресу 40 Hercules Drive, Colchester Vermont, U.S.A. Конечно, могут быть использованы другие генераторы. Например, генератор 16 поля может обеспечивать электромагнитное поле импульсного постоянного тока или электромагнитное поле переменного тока. Система 10 может также включать контрольный модуль (не изображен), соединенный с магнитным генератором 16 поля. Контрольный модуль управляет генератором 16 поля, получает сигналы от небольших мобильных индуктивных датчиков и сообщается с процессором 12 проводным или беспроводным образом. Контрольный модуль может быть интегрирован с процессором 12 посредством аппаратного или программного обеспечения.
[0083] Система 10 представляет собой магнитную систему определения положения. В качестве иллюстрации, система 10 может содержать генератор 16 магнитного поля, содержащий соответствующим образом расположенные электромагнитные индуктивные катушки, служащие в качестве пространственной магнитной системы координат (т.е. X, Y, Z). Система 10 может также содержать небольшие мобильные индуктивные датчики, прикрепленные к объекту, подлежащему отслеживанию. Следует понимать, что могут быть легко предусмотрены другие варианты. Положение и угловая ориентация небольших мобильных индуктивных датчиков определяется по их магнитному взаимодействию с полем источника, производимым генератором 16 магнитного поля.
[0084] Следует отметить, что генератор 16 магнитного поля генерирует последовательность, или набор, в данном случае из шести различных пространственных конфигураций магнитного поля, или распределений, каждая из которых детектируется посредством небольших мобильных индуктивных датчиков. Каждая последовательность обеспечивает возможность генерации последовательности сигналов небольшими мобильными индуктивными датчиками. Обработка последовательности сигналов обеспечивает возможность определения положения и/или ориентации небольших мобильных индуктивных датчиков, и, следовательно, положения объекта, к которому прикреплен небольшой мобильный индуктивный датчик, относительно магнитной системы координат, положение которой зафиксировано по отношению к генератору 16 магнитного поля. Процессор 12 или контрольный модуль может использовать систему отсчета и детектированные данные для создания матрицы преобразований, включающей информацию о положении и ориентации.
[0085] Определитель 18 рельефного ориентира используется для определения положения рельефного ориентира, например, рельефного ориентира на сборке 28 ортопедического имплантата. Определитель 18 рельефного ориентира может содержать один или более небольших мобильных индуктивных датчиков или может содержать генератор поля. Определитель 18 рельефного ориентира содержит второй датчик 20. Определитель 18 рельефного ориентира может содержать любое количество устройств. Например, определитель рельефного ориентира может быть устройством, содержащим структуру, обеспечивающую пользователю понимание местоположения и ориентацию скрытого рельефного ориентира. Например, определитель рельефного ориентира может содержать направляющую сверла, обойму сверла, сверло, носик сверла, ствол сверления, зажимной патрон сверла или фиксирующий элемент. В некоторых вариантах реализации структура может быть корпусом, имеющим отверстие, или другой структурой, указывающей местоположение и ориентацию рельефного ориентира. На фиг.1 определитель 18 рельефного ориентира является обоймой сверла и содержит датчик 20, причем на фиг.39 определитель 2016 рельефного ориентира содержит корпус 2020, имеющий центральное отверстие, и содержит генератор магнитного поля (не изображен) в корпусе 2020. Определитель 18 рельефного ориентира может содержать один или более зубчатых кончиков 22, трубку 24 и ручку 26. Трубка 24 также может быть названа втулкой, цилиндром, направляющей или направляющей размещения сверла/винта. Второй датчик 20 ориентирован относительно оси трубки 24. Трубка 24 может принимать сверло. Этот сдвиг датчика 20 относительно трубки 24 обеспечивает положение и ориентацию трубки, размещаемой в пространстве в шести степенях свободы (три поступательных и три угловых) относительно генератора 16 магнитного поля и/или другого датчика в системе. Может потребоваться калибровка процессора 12 для корректировки расстояния сдвига второго датчика 20. Определитель 18 рельефного ориентира и генератор 16 поля могут быть объединены в единый компонент. Например, генератор 16 поля может быть встроен внутри ручки 26.
[0086] Сборка 28 ортопедического имплантата может содержать имплантат 30 и один или более небольших мобильных индуктивных датчиков. Сборка 28 ортопедического имплантата содержит первый датчик 32. На фиг.1, имплантат 30 имеет форму интрамедуллярного стержня, но могут быть использованы другие типы имплантатов. Например, имплантат может быть интрамедуллярным стержнем, костной пластиной, плечевым протезом, бедренным протезом или коленным протезом. Первый датчик 32 ориентирован и находится в заданном положении относительно одного или более рельефных ориентиров на имплантате 30. Например, рельефный ориентир может быть структурой, полостью, выступом, каналом, фиксатором, фланцем, канавкой, элементом, срезом, ступенью, проемом, просверленным отверстием, углублением, лункой, протоком, дырой, выемкой, окном, проходом, щелью, отверстием или прорезью. На фиг.1, рельефные ориентиры являются трансфиксационными отверстиями 31. Сдвиг первого датчика 32 относительно рельефного ориентира обеспечивает локализацию положения рельефного ориентира, размещаемого в пространстве с шестью степенями свободы (три поступательных и три угловых) относительно генератора 16 магнитного поля или другого датчика в системе, например, второго датчика 32. Может потребоваться калибровка процессора для корректировки расстояния сдвига первого датчика 32.
[0087] Первый датчик 32 и второй датчик 20 соединены с процессором 12. Это может быть обеспечено посредством провода или беспроводным образом. Первый датчик 32 и второй датчик 20 могут представлять собой датчик с шестью степенями свободы, предназначенный для задания местоположения каждого датчика в трех поступательных осях, обычно называемых X, Y и Z, и в трех угловых направлениях, обычно называемых тангаж, рыскание и крен. Посредством размещения датчика в этих системах координат, и зная местоположение и ориентацию каждого датчика, определитель 18 рельефного ориентира может быть расположен относительно рельефного ориентира на имплантате 30. В частных вариантах реализации, информация от датчиков позволяет хирургу планировать хирургический путь для фиксации и соответствующего выравнивания сверла со скрытым отверстием 31 фиксации. Датчики 32, 20 представляют собой датчики с шестью степенями свободы, поставляемые компаниями Ascension Technology Corporation of 107 Catamount Drive, Milton Vermont, U.S.A.; Northern Digital Inc. of 103 Randall Drive, Waterloo, Ontario, Canada; или Polhemus of 40 Hercules Drive, Colchester Vermont, U.S.A. Конечно, могут быть использованы другие датчики.
[0088] Первый датчик 32 может быть прикреплен к имплантату 30. Например, первый датчик 32 может быть прикреплен к внешней поверхности 37. На фиг.1, имплантат 30 может также включать канавку 34 и карман 36 (лучше виден на фиг.2). Канавка 34 и карман 36 расположены в стенке имплантата 30. Первый датчик 32 предназначен для прикрепления к имплантату 30 и размещения в пациенте на время срока службы имплантата 30. Дополнительно, сборка 28 ортопедического имплантата может содержать крышку 38 для покрытия кармана 36 и/или канавки 34. Крышка 38 может быть по существу установлена вровень с внешней поверхностью 37 имплантата 30. Соответствующим образом, имплантат 30 может содержать второе отверстие 39 (см. фиг.2) для приема крышки 38.
[0089] Первый датчик 32 может быть соединен к соединительным проводам для связи и питания. Соединительные провода и датчик могут быть прикреплены к имплантату 30. Соединительный провод 50 может быть использован для соединения первого датчика 32 с процессором 12 или контрольным модулем. Соединительный провод 50 может быть выполнен из биологически совместимого материала. Например, соединительный провод 50 может быть выполнен из провода DFT, поставляемого Fort Wayne Metals Research Products Corp., 9609 Indianapolis Road, Fort Wayne, Indiana 46809. DFT является зарегистрированной торговой маркой компании Fort Wayne Metals Research Products Corp.Для размещения соединительного провода 50 относительно имплантата 30 может быть использован первый разъем 52. Второй разъем 54 может быть использован для соединения соединительного провода 50 с другим устройством, например, процессором 12, контрольным модулем или вставной рукояткой 40.
[0090] Первый датчик 32 может быть зафиксирован в кармане 36 с помощью ряда высокопрочных клеящих веществ или полимеров, включая эпоксидные смолы, полиуретаны, полметилакрилат, полиэфирэфиркетон, УФ-затвердевающие клеящие вещества, силикон и цианоакрилаты для медицинского использования. Например, может быть использован ЕРО-ТЕК 301, поставляемый Ероху Technology, 14 Fortune Drive, Billerica, Massachusetts 01821. Соединительный провод 50 может быть прикреплен в канавке аналогичным образом. Эти типы способов фиксации не влияют негативным образом на результат работы электрических компонентов. После этого, крышка 38 может быть размещена на имплантате 30 и приварена на месте. Например, крышка может быть приварена к имплантату с помощью лазера.
[0091] Монитор 14 может быть выполнен для отображения положения и ориентации первого датчика 32 и второго датчика 20, так что дисплей может показывать хирургу как положения датчиков, так и ориентацию относительно друг друга. Процессор 12 может посылать данные о положении, проводным или беспроводным образом, на интерфейс пользователя, который может графическим образом отображать на мониторе относительные положения определителя рельефного ориентира и имплантата. Вид, отображаемый на мониторе 14, может быть ориентирован относительно определителя рельефного ориентира таким образом, что хирург может визуализировать интерфейс пользователя в качестве продолжения определителя рельефного ориентира. Интерфейс пользователя также может быть ориентирован таким образом, что хирург может видеть монитор одновременно с операционным полем.
[0092] Вставная рукоятка 40 может быть использована для установки сборки 28 ортопедического имплантата и также может быть использована для прокладки соединительных проводов от первого датчика 32. Например, вставная рукоятка 40 может подключать как связь, так и питание соединительных проводов между имплантатом 30 и процессором 12.
[0093] На фиг.1, как определитель 18 рельефного ориентира, так и вставная рукоятка 40 содержат модуль 21, 25 связи для передачи данных беспроводным образом от датчика 20, 32 к процессору 12, но специалисты в данной области техники смогут понять, что могут быть использованы другие способы, например, с помощью провода. Второй разъем 54 подключен к модулю 25 связи. В альтернативном варианте, как это пояснено более подробно далее, имплантат 30 и вставная рукоятка 40 могут иметь стыковочные электрические контакты, образующие соединение, в котором компоненты собраны таким образом, что первый датчик 32 соединен с модулем 25 связи.
[0094] Имплантат 30 может содержать цепь связи и антенну для беспроводной связи. Питание первого датчика 32 и/или цепи связи может быть расположено внутри вставной рукоятки 40. Например, внутри вставной рукоятки 40 может быть размещена батарея для передачи питания к первому датчику 32 и/или другие электронные устройства. В альтернативном варианте, цепь связи, антенна и батарея могут быть расположены внутри вставной рукоятки 40, и каждая из них может быть соединена с первым датчиком 32. В еще одном варианте реализации, имплантат 30 может содержать катушку для индуктивного питания цепи связи и передачи данных от первого датчика 32. Источник питания может иметь один режим питания или может иметь два режима питания: постоянного/переменного тока.
[0095] В рабочем положении сборка 28 ортопедического имплантата размещена в пациенте. Например, в случае внутренней фиксации, интрамедуллярный стержень размещен в интрамедуллярном канале. Опционально, пользователь может использовать трансфиксационные элементы, например, винты, для закрепления в первую очередь проксимального конца интрамедуллярного стержня. Оператор использует устройство 18 определения местоположения и первый датчик 32 для обнаружения местоположения рельефных ориентиров. Например, в случае фиксации интрамедуллярного стержня, хирург использует устройство 18 определения местоположения для определения местоположения скрытых трансфиксационных отверстий 31 и для сверления сквозь отверстия 31 для размещения трансфиксационного элемента.
[0096] Фиг.2 дополнительно изображает имплантат 30, представленный на фиг.1. Имплантат 30 может содержать первый датчик 32, продольную канавку 34, карман 36, крышку 38 и второе отверстие 39. Например, крышка 38 может содержать золотую или титановую фольгу. Имплантат 30 может содержать внутреннюю поверхность 35, образующую канюляцию 33. Наружная поверхность имплантата 30 обозначена номером позиции 37.
[0097] Фиг.3 иллюстрирует вариант реализации первого датчика 32. Первый датчик 32 может содержать две пересекающиеся катушки, расположенные под углом а.
[0098] Фиг.4 и 5 иллюстрируют другой вариант реализации первого датчика 32. Первый датчик может содержать две катушки по существу перпендикулярные друг к другу, задающие ориентацию и положение в шести степенях свободы. Первая катушка может быть ориентирована по длине имплантата 30. Вторая катушка может быть ориентирована таким образом, что она либо обмотана вокруг окружности имплантата, например в канавке, либо вдоль радиуса имплантата 30. Дополнительно, в то время как катушки могут быть перпендикулярны друг к другу, могут быть использованы другие ориентации, хотя математика может быть и более сложной. Дополнительно, катушки могут быть ориентированы спиральным образом вокруг имплантата 30. Такая ориентация может обеспечить, что две катушки будут расположены перпендикулярны друг другу, при этом обе катушки будут размещаться как вдоль по длине имплантата, так и вдоль окружности имплантата 30.
[0099] Фиг.6-8 иллюстрируют второй вариант реализации системы 60 ортопедического имплантата. Сборка 60 ортопедического имплантата может содержать имплантат 30. На фиг.6, имплантат 30 содержит рельефные ориентиры в форме трансфиксационных отверстий 31. Имплантат 30 может содержать продольную внутреннюю канавку 66 и выполненный с возможностью отсоединения соединительный провод 64. На фиг.8, диаметр продольной канавки 66 изображен пересекающимся с канюляцией 33; однако в других вариантах реализации диаметр продольной внутренней канавки находится между наружной поверхностью 37 и внутренней поверхностью 35. Выполненный с возможностью отсоединения соединительный провод 64 может содержать на своем дистальном конечном участке 65 первый датчик 32. Первый датчик 32 расположен с известным сдвигом относительно рельефных ориентиров 31. Имплантат на фиг.6-8 содержит биологически совместимый материал, который может быть металлическим сплавом или полимером. Продольна канавка 66 может быть выполнена на месте посредством механической обработки или литья.
[0100] В рабочем положении имплантат 30 с выполненным с возможностью отсоединения соединительным проводом размещен в пациенте. Например, в случае внутренней фиксации, интрамедуллярный стержень размещен в интрамедуллярном канале. Опционально пользователь может использовать трансфиксационные элементы, например, винты, для закрепления в первую очередь проксимального конца интрамедуллярного стержня. По причине местоположения продольной канавки 66, выполненный с возможностью отсоединения соединительный провод 64 не влияет на запирание проксимального конца интрамедуллярного стержня. Для обнаружения местоположения рельефных ориентиров 31 оператор использует устройство 18 определения местоположения и первый датчик 32. Например, в случае фиксации интрамедуллярного стержня, хирург использует устройство 18 определения местоположения для определения местоположения скрытых трансфиксационных отверстий 31 и выполняет сверление сквозь отверстия 31 для размещения трансфиксационного элемента. После того, как имплантат 30 закреплен, оператор удаляет выполненный с возможностью отсоединения соединительный провод 64, и он может быть выброшен.
[0101] Раскрыт способ для определения местоположения рельефного ориентира. Способ может содержать следующие шаги: берут сборку ортопедического имплантата, содержащую ортопедический имплантат с продольной канавкой и выполненный с возможностью отсоединения соединительный провод или зонд, имеющие прикрепленный к ним электромагнитный датчик, расположенный внутри продольной канавки. Ортопедический имплантат содержит проксимальный конечный участок, дистальный конечный участок, и по меньшей мере один рельефный ориентир на дистальном конечном участке. Способ содержит шаг имплантации сборки ортопедического имплантата в пациенте. Затем размещают трансфиксационные элементы на проксимальном конечном участке. Определяют местоположение по меньшей мере одного дистального рельефного ориентира с помощью определителя местоположения рельефного ориентира. Устанавливают трансфиксационный элемент по меньшей мере в одном дистальном рельефном ориентире. Выполненный с возможностью отсоединения соединительный провод или зонд может затем быть удален. Расположение выполненного с возможностью отсоединения соединительного провода или зонда внутри продольной канавки обеспечивает проксимальную фиксацию имплантата ранее дистальной фиксации.
[0102] На Фиг.9 показан определитель 18 рельефного ориентира по фиг.1. Определитель 18 рельефного ориентира может содержать датчик 20, зубчатый кончик 22, трубку 24 и ручку 26. Сверло 90 имеет метки 92, которые взаимодействуют с датчиком 19 маркировки, примыкающим к трубке 24. Принцип взаимодействия аналогичен цифровому измерительному штангенциркулю, поскольку положение между меткой 92 и датчиком 19 приравнивается к расстоянию. Это расстояние может быть использовано для определения глубины сверла в кости и, в конечном счете, длины костного винта, который будет вставлен в просверленное отверстие. Показания о расстоянии или глубине сверла могут быть получены только когда метки 92 и датчик 19 находятся в непосредственной близости друг от друга, т.е. сверло 90 находится внутри трубки 24. Примеры измерительных устройств проиллюстрированы в патенте США №6,675,491 и патенте США №7,253,611. Датчик 19 маркировки соединен с модулем 21 связи. В альтернативном варианте датчик 19 маркировки может быть соединен с процессором 12 с помощью провода. На фиг.9 модуль 21 связи может иметь третий разъем 23 для электрического соединения с процессором 12.
[0103] Фиг.10-12 иллюстрируют примеры способов электрического соединения имплантата 30 со вставной рукояткой 40, имеющей соответствующие электрические контакты. На фиг.10, смещающие элементы 72 смещают контакты 70 в направлении вставной рукоятки 40. На фиг.11, имплантат 30 имеет эластичные электрические контакты 74. На фиг.12А, провода, проходящие между соединительным проводом 50 и другим компонентом, свиты вместе в месте 76 соединения. В одном способе, провода разрывают и отделяют в месте 76 соединения после установки сборки 28 ортопедического имплантата. В еще одном способе провода разрезают выше места 76 соединения после установки сборки 28 ортопедического имплантата. На фиг.12В и С, на двух гибких пластинах 53 припаяны одна или более контактных площадок 57 для подсоединения электропроводки 55 к датчику. Электропроводка 55 может быть смонтирована на вставной рукоятке 40 или внутри канюляции вставной рукоятки 40. В изображенном варианте реализации четыре контактных площадки 57 спаяны вместе. Фиксирующие пластины 59 расположены между имплантатом 30 и вставной рукояткой 40 для того, чтобы выдержать трение и нагрузки, связанные с введением имплантата. После того, как вставная рукоятка 40 удалена, электропроводка 55 может быть вытянута, так что все биологически несовместимые материалы вытягиваются вместе с нею. На фиг.12D кольца 61, 63 присоединены во время изготовления. После имплантатации оба кольца 61, 63 удаляют посредством вытягивания провода 67 с покрытием.
[00104] Как показано на фиг.13А и 13В, имплантат 30 и/или вставная рукоятка 40 могут содержать один или более выравнивающих элементов 44 и стыковочную выемку 80 или выравнивающий штырь 46 и стыковочное отверстие 82. Вставная рукоятка может быть приспособлена для выравнивания с верхней поверхностью имплантата. В одном варианте реализации вставная рукоятка может иметь ключ, приспособленный для стыковки с прорезью на имплантате. Могут быть использованы другие выравнивающие направляющие. Дополнительно, направляющая может иметь электрический разъем, приспособленный для стыковки с электрическим разъемом на имплантате. Соединение между направляющей и имплантатом может быть пружиной, нагруженной для обеспечения электрического контакта между электрическими разъемами. Для того чтобы избежать короткого замыкания в соединении между направляющей и имплантатом, электрический разъем может быть изолирован. В другом примере электрическим образом соединенной вставной рукоятки к имплантату, электрические разъемы могут содержать штифт и контактное кольцо. Кольца могут быть расположены на имплантате, а штифты расположены на вставной рукоятке. Штифты смещают для контакта с кольцами. В таком варианте реализации угловое местоположение вставной рукоятки 40 относительно оси имплантата не фиксировано. Это обеспечит возможность расположения вставной рукоятки 40 на имплантате независимо от углового положения.
[0105] В другом варианте реализации, изображенном на фиг.13В, имплантат 30 и/или вставная рукоятка 40 могут содержать один или более выравнивающих штырей 47 и стыковочных отверстий 83. Выравнивающие штыри 47 могут быть штырями с заостренным концом, приспособленными для однократного сцепления и при удалении участок захвата штырей имплантата удаляет вместе с ними все биологически несовместимые материалы.
[0106] Любой из описанных выше электрических разъемов может содержать запоминающее устройство (не изображено) для сохранения величин сдвига для калибровки датчиков.
[0107] Как показано на фиг.14, имплантат 30 и вставная рукоятка 40 могут иметь такой размер, что для первого разъема 52 остается пространство, даже когда компоненты собраны или состыкованы. Например, система для определения местоположения рельефного ориентира может быть использована для определения положения скрытых винтовых отверстий имплантированного интрамедуллярного стержня. Интрамедуллярный стержень имплантирован в пациента. Включают электрогенератор магнитного поля. Процессор получает сигналы от датчика, установленного на интрамедуллярном стержне, и от датчика, установленного на определителе рельефного ориентира, например, обойме сверла. Компьютерная программа, работающая на процессоре, использует информацию по меньшей мере двух датчиков и графическим образом отображает их относительное положение на мониторе. Хирург перемещает определители рельефного ориентира в положение на основании информации обратной связи, предоставляемой процессором. Когда определитель рельефного ориентира находится в надлежащем местоположение, хирург просверливает кость и интрамедуллярный стержень для образования винтового отверстия. Процессор может обеспечивать информацию обратной связи, касающуюся глубины просверленного отверстия. Хирург может затем устанавливать в просверленное отверстие винт для присоединения скрытого отверстия интрамедуллярного стержня.
[0108] Предоставляемая информация обратной связи может быть выбрана из группы содержащей звуковую, визуальную и тактильную информацию. Звуковая информации обратной связи может выводиться через динамик, наушники, ушные вкладыши или гарнитуру. Звуковой сигнал обратной связи может быть передан по проводу или беспроводным образом посредством радиочастоты или наземной передачи данных. Визуальная информация обратной связи может выводиться посредством катодной трубки, жидкокристаллического дисплея или плазменного дисплея. Устройства визуальной информации обратной связи могут включать, например, телемонитор, КПК или персональный медиаплеер. Сигнал визуальной информации обратной связи может быть передан по проводу или беспроводным образом с помощью радиочастоты или наземной передачи данных. Тактильная информация обратной связи может выводиться через перчатки, инструменты или напольный ковер. Сигнал тактильной информации обратной связи сигнал может быть передан по проводу или беспроводным образом с помощью радиочастоты или наземной передачи данных.
[0109] Фиг.15 иллюстрирует систему 110 для определения местоположения рельефного ориентира в другом вариант реализации. Система 110 может содержать процессор 112, определитель 118 рельефного ориентира и сборку 128 ортопедического имплантата. Система 110 может также включать монитор 114 и вставную рукоятку 140.
[0110] Определитель 118 рельефного ориентира используется для определения положения рельефного ориентира. Определитель 118 рельефного ориентира может содержать второй датчик 120. На фиг.15, определитель 118 рельефного ориентира представляет собой обойму сверла с зубчатым кончиком 122, трубкой 124 и ручкой 126. Второй датчик 120 ориентирован относительно оси трубки, выполненной с возможностью приема сверла. Этот сдвиг датчика относительно трубки обеспечивает определение положения трубки в пространстве с шестью степенями свободы (три поступательных и три угловых) относительно передатчика или другого датчика в системе. Может потребоваться калибровка процессора для регулировки расстояния сдвига второго датчика 120.
[0111] Сборка 128 ортопедического имплантата может содержать имплантат 130 и магнит 132. Магнит может быть постоянным магнитом или электромагнитом. Магнит 132 ориентирован в заданном положение относительно рельефного ориентира на ортопедическом имплантате 130. Этот сдвиг магнита относительно рельефного ориентира обеспечивает определение положения рельефного ориентира, размещаемого в пространстве с шестью степенями свободы (три поступательных и три угловых) относительно передатчика или другого датчика в системе, например второго датчика. Может потребоваться калибровка процессора для регулировки расстояния сдвига магнита 132. Как и имплантат 30 фиг.1, имплантат 130 может также иметь карман 136 и крышку 138. В случае электромагнита, соединительный провод 150 присоединен к магниту 132 и расположен внутри канавки 134.
[0112] Например, система для определения местоположения рельефного ориентира может быть использована для определения положения скрытых винтовых отверстий имплантированного интрамедуллярного стержня. Интрамедуллярный стержень имплантирован в пациента. Процессор получает сигналы от датчика, установленного на определителе рельефного ориентира, например обойме сверла. Компьютерная программа, работающая на процессоре, использует информацию датчика и графическим образом отображает датчик на мониторе в положении относительно магнита. Хирург перемещает определитель рельефного ориентира в положение на основании информации обратной связи, предоставляемой процессором. Когда определитель рельефного ориентира находится в надлежащем местоположение, хирург просверливает кость и интрамедуллярный стержень для образования винтового отверстия. Процессор может обеспечивать информацию обратной связи, касающуюся глубины просверленного отверстия. Хирург может затем установить в просверленное отверстие винт для присоединения скрытого отверстия интрамедуллярного стержня.
[0113] Фиг.16 иллюстрирует способ для выбора видов, соответствующих положению определителя рельефного ориентира. Вид, отображаемый на мониторе, зависит от местоположения определителя рельефного ориентира относительно имплантата. Сечение имплантата разделено на сектора или поля. На фиг.16 сечение разделено на три поля: (А) 135°-225°; (В) 0°-135°; и (С) 225°-360°. Первоначальный вид основан на ориентации определителя рельефного ориентира относительно имплантата. Когда пользователь перемещает определитель рельефного ориентира в направлении к или от имплантата, монитор отображает приближение или удаление на выбранном поле.
[0114] Фиг.17 представляет собой блок-схему для выбора вида и отображения одного рельефного ориентира. Процесс может быть повторен для нескольких рельефных ориентиров. Процессор 12 использует матрицу преобразований на следующих шагах процесса. На шаге 200 положение определителя рельефного ориентира вычисляется относительно имплантата на основании положений соответствующих датчиков, и для отображения выбирается рельефный ориентир, ближайший к определителю рельефного ориентира. На шаге 210 определяется общий вид, показывающий имплантат целиком с выбранным рельефным ориентиром, ориентированным для надлежащего обзора. Общий вид - это вид имплантата на расстоянии. На шаге 220 принимают решение, имеется ли несколько рельефных ориентиров, имеющих одну и ту же ориентацию. Если да, тогда на шаге 230 процессор вычисляет, какой из рельефных ориентиров является ближайшим к положению определителя рельефного ориентира и выбирает его для показа. Если нет, на шаге 240 выбирается локальный вид и центрируется по выбранному рельефному ориентиру. Локальный вид - это вид имплантата в непосредственной близости. В некоторых вариантах реализации, может потребоваться скрыть определитель рельефного ориентира, когда выбран локальный вид. На шагах 250, 260, и 270 процессор 12 определяет расстояние от определителя рельефного ориентира до рельефного ориентира и в зависимости от принятого решения, либо скрывает либо показывает определитель рельефного ориентира. На шаге 250 определяют расстояние от определителя рельефного ориентира до рельефного ориентира и выполняют сравнение между вычисленным расстоянием D и набором переменных TGlobal и TLocal. Если D>TGlobal, то на шаге 260 выбирают общий вид и процессор переходит к шагу 285. Если D<TLocal, то выбирают локальный вид, и он центрируется по рельефному ориентиру на шаге 270. После этого процессор переходит к шагу 275. На опциональном шаге 275 определитель рельефного ориентира скрывают. В другом случае, на основании расстояния D вычисляют промежуточное положение камеры для обеспечения плавного перехода от общего вида к локальному виду на шаге 280. На шаге 285 изображен определитель рельефного ориентира. На шаге 290 получают кадр при выбранном положении камеры.
[0115] Фиг.18 - схематическая иллюстрация первого альтернативного способа выравнивания определителя рельефного ориентира согласно изобретению. Компьютерная программа, работающая на процессоре, может быть использована для получения информации от по меньшей мере двух датчиков и отображения их графическим образом в относительном положении (второй датчик относительно первого датчика) на мониторе. Это позволяет пользователю использовать систему для сопровождения размещения определителя рельефного ориентира. В случае сверления скрытых отверстий интрамедуллярного стержня, система направляет пользователя при размещении обоймы сверла и впоследствии точного сверления сквозного отверстия в интрамедуллярном стержне. Графический интерфейс пользователя может содержать выравнивающую направляющую для каждой степени свободы. Минимальный уровень выравнивания может быть установлен таким образом, что хирург продолжает менять ориентацию определителя рельефного ориентира до тех пор, пока каждая степень свободы не соответствует минимальному уровню выравнивания для эффективного размещения определителя рельефного ориентира. Пример фиг.18 представляет вариант, в котором размещение в направлении Y соответствует минимальному необходимому определяемому размещению. Однако, никакая из других поступательных или вращательных степеней не соответствует минимальным требования. В то время как отслеживаемые величины проиллюстрированы в виде столбчатой диаграммы, могут быть использованы другие графические представления, например цветовое кодирование.
[0116] Фиг.19 - схематическая иллюстрация второго способа выравнивания определителя рельефного ориентира согласно изобретению. В этом варианте реализации графический интерфейс, использующий несколько светодиодов для позиционирования сверла, может быть помещен на определитель рельефного ориентира, например обойму сверла. Посредством использования светодиодов для траекторией установки сверла, хирург имеет возможность выровнять сверло со скрытым фиксирующим отверстием. При траекторией установке могут дополнительно использоваться вспомогательные дисплеи, служащие для добавления дополнительной информации в систему. Например, для влияния на амплитуду настройки, траектория может содержать мигающие светодиоды, так что высокая частота мигания требует большой настройки, в то время как низкая частота мигания может требовать более мелкой настройки. Аналогичным образом, цвета могут добавлять информацию, касающуюся настройки выравнивания.
[0117] Фиг.20 иллюстрирует монитор с примерами видов. Первый участок 500 указывает расстояние, на котором находится сверло с каждой стороны имплантата. Это может обеспечивать пользователю с лучшее понимание, на какой глубине находится сверло, и предупреждать пользователя, когда остановиться, если соответствующая глубина сверления была достигнута. Второй участок 510 обеспечивает пользователю информацию о выравнивании. Например, данные о глубине сверла могут быть получены с помощью варианта реализации, представленного на фиг.9.
[0118] Фиг.21 иллюстрирует альтернативный вариант реализации определителя рельефного ориентира. Определитель рельефного ориентира сконфигурирован для отображения, с помощью светодиодов, положения и информации о траектории для надлежащего выравнивания. Размер светодиодов может отображать дополнительную информацию, касающуюся амплитуды необходимой регулировки. Траектория свет может отображать простое тумблерное переключение между выравненной траекторией и невыравненной траекторией. В другом примере траектория светодиода может иметь цветовую кодировку, предлагающую амплитуду необходимой регулировки для надлежащего выравнивания.
[0119] Фиг.22 иллюстрирует первый альтернативный вариант реализации вставной рукоятки 700. Вставная рукоятка 700 может содержать дугообразную прорезь 710. Дугообразная прорезь ограничивает движение определителя рельефного ориентира 18, 118 внутри рабочего пространства. В случае определения положения скрытого винтового отверстия, дугообразная прорезь отграничивает движение обоймы сверла для точной регулировки его положения. Вставная рукоятка 700 может содержать каретку 712, принимающую определитель рельефного ориентира и входящую в прорезь 710.
[0120] Фиг.23 иллюстрирует систему для определения местоположения рельефного ориентира согласно третьему варианту реализации. В этом варианте реализации ортопедический имплантат 800 является костной пластиной, а вставная рукоятка 810 является малой направляющей, прикрепленной к костной пластине. Индуктивный датчик размещен на поверхности ортопедического имплантата 800 относительно одного или более рельефных ориентиров. Направляющая 810 может обеспечить определителю рельефного ориентира 818 сдвиг и/или поворот относительно направляющей для соответствующего выравнивания определителя рельефного ориентира относительно рельефного ориентира 802, например относительно крепежного отверстия. Дополнительно, в том случае, если на имплантате имеется несколько отверстий фиксации, приблизительно оценить положение дополнительных фиксирующих отверстий могут помочь дополнительные направляющие отверстия 812 на направляющей 810.
[0121] Фиг.24 иллюстрирует второй альтернативный вариант реализации вставной рукоятки. Вставная рукоятка 900 может обеспечивать точную регулировку положений определителя 918 рельефного ориентира посредством использования малых сервоприводов 920, 922, 924. Сервоприводы 920, 922, 924 могут регулировать ориентацию и положение определителя 918 рельефного ориентира. Управление сервоприводами может осуществляться автоматически или может управляться хирургом.
[0122] Фиг.25 иллюстрирует кость 100 и другую систему 1010 для определения местоположения рельефного ориентира. Система 1010 может содержать контрольный модуль 1012, генератор 1014 поля, определитель 1016 рельефного ориентира, интрамедуллярный стержень 1024 и зонд 1029. Определитель 1016 рельефного ориентира также может называться прицелом. Контрольный модуль 1012 может представлять собой часть процессора, описанного выше, или может быть отдельным устройством. Интрамедуллярный стержень 1024 вставлен в кость 100, и интрамедуллярный стержень 1024 имеет отверстие или рельефный ориентир 1028. Генератор 1014 поля соединен электрическим образом с контрольным модулем 1012. Вставная рукоятка 1022 прикреплена с возможностью отсоединения к интрамедуллярному стержню 1024. Вставная рукоятка 1022 и/или интрамедуллярный стержень 1024 могут быть образованы с канюляцией. Вставная рукоятка 1022 может содержать третий датчик 1032.
[0123] Определитель 1016 рельефного ориентира может содержать второй датчик 1020. Определитель 1016 рельефного ориентира может направлять головку 1018 сверла, а головка 1018 сверла может быть соединена со сверлом (не изображено). Второй датчик 1020 может быть соединен с контрольным модулем 1012 проводным или беспроводным образом. Генератор 1014 поля может быть расположен внутри или на определителе 1016 рельефного ориентира, в этом случае можно обойтись без второго датчика 1020.
[0124] Зонд 1029 может содержать провод 1030, ленту 1034 и стопор 1036. Лента 1034 может быть около 0.125 дюйма шириной и около 0.060 дюйма толщиной из протяжной проволокой 300-ой серии из нержавеющей стали, поставляемой Ideal Industries, Inc. of Sycamore, Illinois. Однако, специалисты в данной области техники могут понять, что могут быть использованы другие материалы и другие размеры. Например, в качестве ленты 1034 может быть использована любая узкая полоска из полимера, композитного материала или металла, но, возможно, предпочтительно использовать неферромагнитный металл. Лента 1034 до размещения в интрамедуллярном стержне 1024 может быть смотана. Сматывание ленты 1034 может привести к тому, что она будет иметь естественную кривизну. Лента 1034 может иметь, в некоторых вариантах реализации, прямоугольную форму, служащую для ориентации ленты при ее размещении в канюляции интрамедуллярного стержня 1024. Также может быть использована овальная, квадратная или круглая форма. Провод 1030 может быть оперативным образом соединен с лентой 1034. Например, это может быть выполнено посредством использования клейкого вещества или крепежа. Лента 1034 может содержать градуировку или фиксаторы для индикации глубины ленты, вставленной в имплантат.
[0125] Первый датчик 1026 соединен с контрольным модулем 1012 проводным или беспроводным образом. Первый датчик 1026 соединен посредством использования провода 1030 и разъема 1038. Разъем 1038 не обязателен. Первый датчик 1026 может быть соединен с дистальным концом ленты 1034, и стопор 1036 может быть соединен с проксимальным концом ленты 1034.
[0126] Зонд 1029 может содержать корпус датчика (не изображен) для размещения первого датчика 1026. Корпус датчика может быть прикреплен к ленте 1034. Корпус датчика может быть выполнен из неферромагнитного материала, например полимера, композитного материала или металла. Корпус датчика может содержать соответствующий компенсатор напряжения для защиты провода 1030 от напряжения. Корпус датчика может иметь конструкцию и расположение, чтобы быть достаточно большим, чтобы удерживать первый датчик 1026, но достаточно маленьким, чтобы входить в канюляцию вставной рукоятки или имплантат. Дополнительно корпус датчика может иметь конструкцию и расположение, чтобы быть достаточно длинным для того, чтобы обеспечить проход через изгибы интрамедуллярного стержня, через прогибы интрамедуллярного стержня и/или изгибы в соответствующих инструментах. Форма соединительного провода и задних граней корпуса датчика может быть выполнена таким образом, что корпус датчика не захватывает и не цепляет канюляцию инструмента или имплантата.
[0127] Стопор 1036 может быть использован для контроля размещения датчика 1026 и зонда 1029. Если лента 1034 имеет фиксированную длину и расстояние от конца вставной рукоятки до отверстия 1028 известно, можно обеспечить многократное размещение первого датчика 1026. Лента 1034 может быть достаточной длины, так что датчик 1026 выравнен с отверстием 1028, примыкает к отверстию 1028 или сдвинут относительно отверстия 1028. Как показано ниже, для размещения датчика относительно отверстия 1028 или других рельефных ориентиров может быть использован зонд 1029.
[0128] Вставная рукоятка 1022 не обязательна. В этом случае различная длина ленты может быть подобрана так, что стопор 1036 входит в сцепление с участком или концом стержня 1024.
[0129] Фиг.26 представляет собой частичный подробный вид интрамедуллярного стержня 1024, датчика 1026 и отверстия 1028. Датчик 1026 может быть выровнен с отверстием 1028, примыкать к отверстию 1028 или быть сдвинутым относительно отверстия 1028. Датчик 1026 по существу примыкает к отверстию 1028.
[0130] В рабочем состоянии интрамедуллярный стержень 1024 размещен в кости 100. Вставная рукоятка 1022 может быть прикреплена к интрамедуллярному стержню 1024. Зонд 1029 подают через канюляцию вставной рукоятки 1022 и канюляцию интрамедуллярного стержня 1024 до тех пор, пока стопор 1036 ни входит в сцепление с вставной рукояткой 1022. В частных вариантах реализации провод 1030 соединен с контрольным модулем 1012, а датчики 1026, 1020, и 1032 калибруются с помощью контрольного модуля 1012. Зонд 1029 может быть удален после калибровки. В этом случае для определения относительного положения второго датчика 1020 и, следовательно, определителя 1016 рельефного ориентира могут быть использованы третий датчик 1032 и матрица преобразований. Опционально пользователь может использовать трансфиксационные элементы, например, винты, для закрепления в первую очередь проксимального конца интрамедуллярного стержня. Оператор использует определитель 1016 рельефного ориентира и первый датчик 1026 для обнаружения местоположения рельефных ориентиров 1028. Например, в случае фиксации интрамедуллярного стержня, хирург использует определитель 1016 рельефного ориентира для определения местоположения скрытых трансфиксационных отверстий и сверления сквозных отверстий для размещения трансфиксационного элемента.
[0131] Фиг.27 иллюстрирует вариант реализации контейнера. В общем случае, интрамедуллярные стержни должны быть стерилизованы до имплантации. Если датчик размещен в интрамедуллярном стержне до стерилизации, датчик может терять свою калибровку во время процесса стерилизации, в частности, если процесс стерилизации включает обработку излучением. Например, для стерилизации герметично закупоренных компонентов, например датчика может быть использовано гамма излучение. Вариант реализации, изображенный на фиг.27 иллюстрирует способ сохранения стерилизации интрамедуллярного стержня, в то же время обеспечивающий повторную калибровку датчика. Контейнер на фиг.27 может содержать первый контейнер 1040, второй контейнер 1042, первый разъем 1044, второй разъем 1046 и кабель 1048. В изображенном варианте реализации датчик (не изображен) и интрамедуллярный стержень 1024 расположены внутри первого контейнера 1040. В альтернативном варианте внутри первого контейнера 1040 расположены зонд 1029 и датчик. В еще одном примере внутри первого контейнера 1040 расположен только датчик. К датчику может быть присоединено запоминающее устройство (не изображено). Запоминающее устройство может быть использовано для хранения матрицы преобразований калибровки (х1, yl, z1, x2, y2, z2), а также других данных, например длины и размера интрамедуллярного стержня или зонда. Запоминающее устройство может быть установлено или размещено на интрамедуллярном стержне 1024 или зонде 1029. Первый разъем 1044 соединен электрическим образом, но прикреплен с возможностью отсоединения, ко второму разъему 1046. Первый разъем 1044 также соединен электрическим образом с датчиком или запоминающим устройством. Первый контейнер 1040 сохраняет стерилизацию устройства, находящегося внутри него. Кабель 1048 подсоединен электрическим образом ко второму разъему 1046 и устройству хранения (не изображено). Калибровка датчика загружается из устройства хранения и передается посредством разъемов1044, 1046 к датчику или запоминающему устройству. Шаг калибровки может быть выполнен во время изготовления системы или непосредственно перед имплантацией имплантата.
[0132] Фиг.28 иллюстрирует способ подсоединения системы 1010 к сети. Фиг.28 иллюстрирует сеть 1060, компьютерное устройство 1050, кабель 1048, второй разъем 1046, первый разъем 1044 и интрамедуллярный стержень 1024. В изображенном варианте реализации датчик (не изображен) расположен внутри интрамедуллярного стержня 1024. В альтернативном варианте датчик может быть прикреплен к зонду 1029 или быть выполненным отдельно. Интрамедуллярный стержень 1024 может быть завернут в упаковку, например в первый контейнер 1040 и/или второй контейнер 1042, но это не всегда обязательно так. К датчику может быть присоединено запоминающее устройство (не изображено). Запоминающее устройство может быть использовано для хранения матрицы преобразований калибровки (х1, yl, z1, x2, y2, z2), а также других данных, например длины и размера интрамедуллярного стержня или зонда. Запоминающее устройство может быть установлено или размещено на интрамедуллярном стержне 1024 или зонде 1029. Сеть 1060 может быть локальной сетью или распределенной сетью. К сети 1060 подсоединено компьютерное устройство 1054. Связь в сети может быть зашифрована. Кабель 1048 соединяет компьютерное устройство 1054 с датчиком или запоминающим устройством с помощью разъемов 1044, 1046. Таким образом, калибровка датчика может быть загружена из компьютерного устройства 1054 и/или из сети 1060. В то время как изображенный вариант реализации иллюстрирует датчик внутри интрамедуллярного стержня, это не всегда обязательно так. Датчик может быть прикреплен к зонду или быть выполненным отдельно. Запоминающее устройство может быть расположено внутри контрольного модуля, и контрольный модуль соединен с сетью для загрузки калибровочных данные.
[0133] Фиг.29 иллюстрирует систему 1110 для определения местоположения рельефного ориентира согласно четвертому варианту реализации. Система 1110 может содержать контрольный модуль 1112, генератор 1114 поля, определитель 1116 рельефного ориентира, интрамедуллярный стержень 1124, панель 1136 и зонд 1129. Контрольный модуль 1112 может представлять собой часть процессора, описанного выше, или может быть отдельным устройством. Интрамедуллярный стержень 1124 вставлен в кость 100, и интрамедуллярный стержень 1124 имеет отверстие или рельефный ориентир 1128. Генератор поля 1114 соединен с контрольным модулем 1112 проводным или беспроводным образом. В изображенном варианте реализации вставная рукоятка 1122 прикреплена с возможностью отсоединения к интрамедуллярному стержню 1124. Вставная рукоятка 1122 и/или интрамедуллярный стержень 1124 могут быть выполнены с канюляцией. Вставная рукоятка 1122 может содержать третий датчик 1144. Панель 1136 может содержать четвертый датчик 1139.
[0134] Определитель 1116 рельефного ориентира может содержать второй датчик 1120. Определитель 1116 рельефного ориентира может направлять головку 1018 сверла, а головка 1018 сверла может быть соединена со сверлом (не изображено). Второй датчик 1120 может быть соединен с контрольным модулем 1112 проводным или беспроводным образом. Генератор 1114 поля может находиться внутри или на определителе 1116 рельефного ориентира, в этом случае можно обойтись без второго датчика 1120.
[0135] Зонд 1129 может содержать провод 1130, ленту 1134 и стопор 1136. Как показано ниже, зонд также может быть более единым по своей структуре. Лента 1134 может иметь, в некоторых вариантах реализации, прямоугольную форму, служащую для ориентации ленты при ее размещении в канюляции интрамедуллярного стержня 1124. Провод ИЗО может быть функционально соединен с лентой 1134. Например, это может быть выполнено посредством использования клейкого вещества или крепежа. Первый датчик 1126 соединен с контрольным модулем 1112 проводным или беспроводным образом. Первый датчик 1126 соединен с помощью провода ИЗО. В некоторых вариантах реализации может быть использован выполненный с возможностью отсоединения разъем. Первый датчик 1126 может быть соединен с дистальным концом ленты 1134, и стопор 1136 может быть соединен с проксимальным концом ленты 1134. Для контроля размещения датчика 1126 может быть использован стопор 1136. Если лента 1134 имеет фиксированную длину и расстояние от конца вставной рукоятки до рельефного ориентира 1128 известно, может быть реализовано многократное размещения первого датчика 1126. Лента 1134 может быть достаточной длины, так что датчик 1126 выровнен с рельефным ориентиром 1128, примыкает к рельефному ориентиру 1128 или сдвинут относительно рельефного ориентира 1128.
[0136] В рабочем положении интрамедуллярный стержень 1124 размещен в кости 100. Вставная рукоятка 1122 может быть прикреплена к интрамедуллярному стержню 1124. Зонд 1129 подают через вставную рукоятку 1122 и интрамедуллярный стержень 1124 до тех пор, пока стопор 1136 не войдет в сцепление с вставной рукояткой 1122. В частных вариантах реализации провод ИЗО соединен с контрольным модулем 1112, а датчики 1126, 1120, и 1132 калибруются с помощью контрольного модуля 1112. Зонд 1129 может быть удален после калибровки. В этом случае для определения относительного положения второго датчика 1120 и, следовательно, прицела 1116 могут быть использованы третий датчик 1132 и/или четвертый датчик 1139 и матрица преобразований. Опционально пользователь может использовать трансфиксационные элементы, например, винты, для закрепления в первую очередь проксимального конца интрамедуллярного стержня Оператор использует определитель 1116 рельефного ориентира и первый датчик 1126 для определения местоположения рельефных ориентиров 1128. Например, в случае фиксации интрамедуллярного стержня, хирург использует определитель 1116 рельефного ориентира для определения местоположения скрытых трансфиксационных отверстий и сверления сквозных отверстий для размещения трансфиксационного элемента.
[0137] Фиг.30 иллюстрирует первый способ использования системы для определения местоположения рельефного ориентира. Способ начинается шагом 1210. На шаге 1212 датчик помещают в стержень. На шаге 1214 вставную рукоятка соединяют со стержнем, и панель прикрепляют к вставной рукоятке. На шаге 1216 контрольный модуль соединяют с датчиком. На шаге 1218 датчик калибруют. На шаге 1220 датчик выравнивают относительно отверстия. На шаге 1222 положение датчика записывают с помощью контрольного модуля. На шаге 1224 датчик удаляют из стержня. На шаге 1226 стержень имплантируют в кость. На шаге 1228 просверливают отверстие с помощью прицела. Способ завершается на шаге 1230.
[0138] Фиг.31 иллюстрирует второй способ использования системы для определения местоположения рельефного ориентира. На шаге 1310 включают систему слежения. На шаге 1312 интрамедуллярный стержень вставляют в кость. На шаге 1314 зонд 1129 вставляют в канал интрамедуллярного стержня с заранее заданным положением и ориентацией с помощью стопора 1136 и фиксаторов, размещенных на расстоянии по длине зонда 1129. На шаге 1316 принимают решение, должен ли интрамедуллярный стержень быть зафиксирован проксимально до того, как он будет зафиксирован дистально. Если да, то на шаге 1326 панель прикрепляют к стержню. На шаге 1328, вычисляют сдвиг между зондом и панелью. Другими словами, создают матрицу преобразований. В альтернативном варианте, панель не соединена с интрамедуллярным стержнем, а наоборот для вычисления сдвига используют датчик, вмонтированный во вставную рукоятку. На шаге 1330 зонд удаляют из стержня. На шаге 1334 стержень фиксируют проксимально. Это может быть выполнено с помощью определителя рельефного ориентира, механической опорной пластины или вручную. На шаге 1336 определитель рельефного ориентира используют для определения положения сверла. На шаге 1338, просверливают отверстие для дистального винта. На шаге 1340 интрамедуллярный стержень фиксируют дистально. С другой стороны, если принимают решение о фиксации в первую очередь дистально, то на шаге 1318 для определения положения головки сверла используют определитель рельефного ориентира и зонд. На шаге 1320, просверливают отверстие для дистального винта. На шаге 1322 интрамедуллярный стержень фиксируют дистально. На шаге 1324 зонд удаляют из интрамедуллярного стержня. На шаге 1324 интрамедуллярный стержень фиксируют проксимально. Это может быть выполнено с помощью определителя рельефного ориентира, механической опорной пластины или вручную.
[0139] Фиг.32 иллюстрирует систему для измерения глубины размещения головки сверла. Система 1400 может содержать статор 1410 и слайдер 1412. Статор 1410 и слайдер 1412 образуют емкостную матрицу, которая может регистрировать относительное движение. Перемещение статора 1410 и слайдера 1412 в линейном соотношении относительно друг друга вызывает флуктуацию напряжения, которая может быть интерпретирована и использована для определения пройденного расстояния. В некоторых вариантах реализации, электронная измерительная цепь (не изображена) и слайдер 1412 могут быть размещены внутри определителя рельефного ориентира, а головка сверла может быть сконструирована таким образом, чтобы иметь статор 1410 вдоль внешней поверхности, так что статор 1410 и слайдер 1412 находятся в сильной линейной близости друг от друга. Линейное движение статора 1410 головки сверла индуцирует напряжение в принимающем слайдере 1412, которое интерпретируется с помощью электронной измерительной цепи в виде измеряемого расстояния. Измеряемое расстояние может быть отправлено на контрольный модуль и/или отображаться на мониторе. Емкостные датчики высоко чувствительны к влажности, и поэтому некоторые варианты реализации могут предупреждать проникновение жидкости, например жидкостей организма, между статором 1410 и слайдером 1412. 0-образные кольца или некоторые другие аналогичные формы вытесняющего приспособления могут быть встроены внутри определителя рельефного ориентира для того, чтобы предохранять головку сверла, по существу, от воздействия жидкости.
[0140] Фиг.33А и 33 В иллюстрируют другую систему для измерения размещения глубины головки сверла. Система 1500 может содержать отражающее колесо или ленту 1510 с циклическим кодом, линзу 1512 и кодирующее устройство 1514. Линза 1512 фокусирует свет на полоску кодовой ленты 1510. При повороте кодовой ленты 1510, чередующийся рисунок света и тени, отбрасываемых окном и полоской, соответственно, падает на фотодиоды кодирующего устройства 1514. Кодирующее устройство 1514 конвертирует этот рисунок в цифровой выходной сигнал, отражающий линейное движение кодовой ленты. Кодирующее устройство представляет собой Отражающее Оптическое Кодирующее Устройство Avago Technologies AEDR-8300, поставляемое компанией Avago Technologies, расположенной по адресу 350 W Trimble Road, San Jose, California. В альтернативном варианте, может быть использована навигационная система на основе светодиодов Avago Technologies ADNS-5000 One Chip USB. Кодирующее устройство и поддерживающие его электронные устройства могут быть размещены внутри определителя рельефного ориентира, так что его область ввода ориентирована в направлении "окна" в канюляции определителя рельефного ориентира. Метки, например темно окрашенные концентрические кольца или яркие отражающие кольца, могут быть добавлены к головке сверла для того, чтобы повысить видимость головки для кодирующего устройства. Эти метки могут также быть использованы для того, чтобы пометить начальную нулевую точку измерений. Головка сверла перемещается линейно внутри определителя рельефного ориентира, и кодирующее устройство измеряет движение головки сверла. Измеряемое расстояние может быть отправлено на контрольный модуль и/или отображаться на мониторе.
[0141] Фиг.34 иллюстрирует еще одну систему для измерения глубины сверления. Система 1600 использует Линейно Регулируемый Дифференциальный Трансформатор (ЛРДТ) 1612. ЛРДТ представляет собой тип электрического трансформатора, используемого для измерения линейного перемещения. ЛРДТ 1612 может содержать несколько катушек 1618 соленоидов, расположенных в стык вокруг трубку 1610, которая в изображенном варианте реализации представляет собой определитель рельефного ориентира. На фиг.34, центральная катушка является первичной катушкой, а внешние две катушки являются вторичными катушками. Цилиндрический ферромагнитный сердечник 1610, например головка сверла, скользит вдоль оси трубки. Переменный ток 1614 возбуждается в первичной катушке, вызывая индуцированное напряжение в каждой вторичной катушке пропорционально ее взаимной индуктивности по отношению к первичной. Улавливающий датчик 1616 измеряет амплитуду выходного напряжения, которая пропорциональна расстоянию, на которое перемещен сердечник (до предела его перемещения). Фаза напряжения указывает на направление перемещения. Поскольку скользящий сердечник не касается внутренней поверхности трубки, он может двигаться без трения, что делает ЛРДТ высоконадежным устройством. Отсутствие каких-либо скользящих или вращающихся контактов обеспечивает ЛРДТ полную изоляцию от внешней среды. Измеряемое расстояние может быть отправлено на контрольный модуль и/или отображаться на мониторе.
[0142] Фиг.35-37 иллюстрируют вставную рукоятку 1700 (фиг.35) и регулируемый стопор 1800 (фиг 37-38). Вставная рукоятка 1700 представляет собой стержень 1710, соединяющийся с имплантатом, например интрамедуллярным стержнем (не изображен), на конечном участке 1712. Вставная рукоятка 1700 может содержать приспособление 1716 для быстрого подсоединения для прикрепления к панели, проксимальному устройству определения местоположения или некоторым другим инструментам или устройствам. Вставная рукоятка может содержать верхний участок 1714, который может содержать отверстие и/или выравнивающий элемент. Регулируемый стопор 1800 может содержать прорезь 1810, выравнивающий элемент 1812 и крепежное отверстие 1814.
[0143] На фиг.35-37 показано, что регулируемый стопор 1800 может быть прикреплен с возможностью отсоединения к верхнему участку 1714 ручки 1700. Регулируемый стопор может быть образован как единое целое с вставной рукояткой 1700. В других вариантах реализации регулируемый стопор может быть постоянно прикреплен к вставной рукоятке 1700. Выравнивающий элемент 1812 входит внутрь выравнивающего приспособления верхнего участка, чтобы предотвратить вращение регулируемого стопора. Крепеж (не изображен) может быть размещен в крепежном отверстии 1814 для прикрепления регулируемого стопора к вставной рукоятке 1700. Лента 1034, 1134 может помещаться через прорезь 1810, через стержень 1710 и в канюляцию интрамедуллярного стержня. Прорезь 1810 может иметь форму, соответствующую геометрии ленты и/или зонда 1129, обеспечивающую их введение. Лента 1034, 1134 или зонд 1129 могут содержать метки, градуировку или фиксаторы для индикации соответствующей глубины для данной длины стержня. Регулируемый стопор 1800 может содержать механизм фиксации (не изображен) для временной фиксации ленты 1034, 1134 на определенной глубине. В своей простейшей форме механизм фиксации может представлять собой фиксатор, который с помощью трения входит в сцепление с лентой 1034, 1134.
[0144] Фиг.38 иллюстрирует способ калибровки системы для определения местоположения рельефного ориентира. Калибровка необходима для точности. Способ начинается шагом 1900, который может содержать шаг запитывания системы. На шаге 1910 зонд и определитель рельефного ориентира вынимают из упаковки, если она имеется, и сканируют. Панель также сканируют. Шаг сканирования может содержать считывание штрих-кода с помощью считывателя штрих-кода. Сканирование заставляет систему выдать величины сдвига датчика, соответствующие штрих-коду, из справочной таблицы на шаге 1912. Справочная таблица может быть локальной или доступной через сеть, например Интернет. В альтернативном варианте зонд и определитель рельефного ориентира могут содержать серийный номер или другой уникальный идентификатор, и уникальный идентификатор используется в сочетании со справочной таблицей для получения величины сдвига датчика. Величину сдвига датчика сохраняют в локальной памяти системы на шаге 1914. На шаге 1916 пользователь размещает зонд относительно имплантата и выполняет поиск рельефного ориентира с помощью определителя рельефного ориентира на шаге 1916. На шаге 1918 принимают решение, является ли калибровка правильной. Если это так, способ заканчивают шагом 1920. В противном случае получают новую величину сдвига на шаге 1912.
[0145] Фиг.39 иллюстрирует вариант реализации, объединяющий определитель рельефного ориентира, генератор поля и обойму сверла. Ручной определитель 2016 рельефного ориентира содержит электрогенератор магнитного поля (не изображен), который может содержать одну или более индукционную катушку или другие элементы для создания подходящего электромагнитного поля или полей. Электрогенератор магнитного поля прикреплен внутри или на выполненном с возможностью обработки в автоклаве материале и заключен в силиконовый корпус 2018, который может быть легко стерилизован, и который соединен инструментом с возможностью отсоединения. Относительная ориентация и положение индукционных катушек или элементов в определителе 2016 рельефного ориентира могут быть выбраны для оптимизации баланса между качеством и силой электромагнитного поля или полей и их взаимодействия с датчиком и весом, размером, форм-фактором и эргономикой определителя 2016. По меньшей мере три индукционных катушки (не изображены) могут быть установлены внутри или на выполненном с возможностью обработки в автоклаве материале.
[0146] Выполненный с возможностью обработки в автоклаве материал обеспечивает определителю 2016 рельефного ориентира стерилизацию или обработку в автоклаве несколько раз без ухудшения выполненного с возможностью обработки в автоклаве материала, внутренних элементов или рабочих показателей. Например, корпус 2018 содержит внутреннее тело или монтажную конструкцию (не изображена), на которой закреплены катушки и/или другие компоненты, генерирующие электромагнитное поле. Внутреннее тело образовано из материала, который не влияет негативным образом на генерируемое электромагнитное поле и который может быть подвергнут процессам стерилизации, включая обработку в автоклаве. Например, внутреннее тело может быть образовано из армированного стекловолокном эпоксидного ламината, например армированного стекловолокном эпоксидного ламината NEMA класса G-11 (VETRONITE G11) или его эквивалентов. Внутреннее тело окружено первый покрытием 2018а, образованным из первого материала, например из многокомпонентного сформованного силиконового материала VMQ #71385С, поставляемого компанией Minnesota Rubber & Plastics, расположенной по адресу 1100 Xenium Lane N., Minneapolis, MN 55441. Корпус 2018 также содержит второе покрытие 2018b, которое может обеспечивать дополнительный слой защиты или изоляции на внешней границе корпуса 2018. Второе покрытие 2018b может быть образовано из второго материала, например сформованного силиконового материала VMQ #713250, поставляемого компанией Minnesota Rubber & Plastics, расположенной по адресу 1100 Xenium Lane N., Minneapolis, MN 55441. Корпус 2018 также содержит соединительный элемент 2018 с, проходящий сквозь внутреннее тело и входящий в сцепление с одним или более прикрепляемым компонентом. Соединительный элемент 2018 с может быть образован из полисульфона, например из полифенилсульфона GEHR PPSU RAL 9005 Black (Solvay Radel R-5500) или его эквивалентов, и может быть по меньшей мере частично покрыт первым покрытием 2018а.
[0147] Частный вариант определителя 2016 рельефного ориентира, представленного на фиг.39, может также содержать выполненную с возможностью отсоединения насадку 2020 обоймы сверла и обойму 2022 сверла с зубчатым кончиком 2024, посредством которого могут быть включены различные компоненты и конструкции, как описано в документе. Насадка 2020 обоймы и обойма 2022 сверла могут быть образованы как единый элемент или отдельными устройствами, соединенными друг с другом посредством клейких веществ или другими средствами соединения, известным специалистам в данной области техники. Для иллюстративной цели, обойма 2022, представленная на фиг.39, представляет собой обойму сверла, но также может быть и обоймой большего размера, например обоймой отвертки или другими обоймами по выбору хирурга, или другими компонентами, как описано в данном документе. Для замены обойм или других компонентов, хирург отвинчивает насадку обоймы и заменяет ее другой насадкой обоймы по выбору и соответствующей ей обоймой.
[0148] В отличие от определителя 18 рельефного ориентира, представленного на фиг.9, определитель 2016 рельефного ориентира, изображенный на фиг.39-40, не требует второго датчика 20, представленного на фиг.9, поскольку источник глобального пространства (область, в которой генерируется электромагнитное поле) может быть задан внутри определителя 2016 рельефного ориентира. Одной осью глобальной системы пространственных координат может быть продольная ось обоймы сверла или другого компонента 2022. В этом случае, другие две оси глобальной системы пространственных координат могут быть определены плоскостями, перпендикулярными этой продольной оси и друг от другу. К преимуществам встраивания генератора поля в определителе 2016 рельефного ориентира относятся меньшие размеры генератора поля, поскольку он может быть введен в локальное рабочее пространство (область, которая может содержать рельефные ориентиры, например отверстия имплантата, которые должны быть определены для размещения винта) и по этой причине требует меньшего электромагнитного поля. Глобальное пространство и локальное рабочее пространство становятся одним и тем же или, по меньшей мере, более близко соответствуют друг другу пространственным образом, если определитель 2016 рельефного ориентира вместе с его генератором поля приближают к рельефному ориентиру, имплантату или датчику зонда (не изображен). Поскольку требования по величине электромагнитного поля ниже, индукционные катушки внутри генератора поля могут быть меньше, что таким образом позволяет снизить размер и вес ручного генератора поля и сделать его более управляемым для ручного использования. В области определителя рельефного ориентира/генератора поля/сверла 2016, например в области 2025,может быть предусмотрен свет, указывающий пользователю, что к определителю рельефного ориентира/генератору поля/сверлу 2016 поступает питание. На фиг.41 обойма 2022 сверла удалена, и определитель 2016 рельефного ориентира находится в сцеплении с отверткой 2100 для фиксации имплантата к кости. Как изображено на фиг.41, корпус 2018 определителя 2016 рельефного ориентира может содержать одно или более углублений 2018d для размещения пальца, обеспечивающих пользователю комфортное размещение его или ее руки вокруг определителя 2016 рельефного ориентира. В варианте реализации, изображенном на фиг.41, имеется шесть углублений. Дополнительно, текстура и размер внешней поверхности корпуса 2018 могут быть выполнены таким образом, чтобы обеспечить пользователю комфортный и надежный захват корпуса 2018. Дополнительно или в альтернативном варианте определитель 2016 рельефного ориентира может быть прикрепляемым к инструменту, например к корпусу отвертки 2100.
[0149] Выбор материала для определителя 2016 рельефного ориентира фиг.39, в котором находится генератор поля, может быть оптимизирован с точки зрения веса и стабильности работы после нескольких циклов обработки в автоклаве. Может быть использован любой материал, позволяющий обработку в автоклаве, и материалы являются предпочтительно немагнитными или слабо магнитными во избежание или минимизации взаимодействия с электромагнитными полями. Примеры материалов включают керамику, выполненные с возможностью обработки в автоклаве полимеры, например полипропилен (РР), сополимер полипропилена (РРСО), поликарбонат (PC), полиметилпентен (РМР), политетрафлуроэтиленовые смолы (PTFE), полметилакрилат (РММА или акриловый полимер), этилен тетрафлуроэтилен (ETFE), этилен хлортрифлуроэтилен (ECTFE), флуро этилен пропилен (FEP), полиэстер имид (PEI), перфторалкоксил (PFA), поликетон (РК), полифенилен оксид (РРО), полисульфон (PSF), поливинил хлорид (PVC), поливинилиден флуорид (PVDF), силикон, или термоэластопласт (ТРЕ), и, кроме того, другие выполненные с возможностью обработки в автоклаве материалы, которые будут очевидны специалистам в данной области техники, включая сочетания упомянутых выше материалов.
[0150] Фиг.42 иллюстрирует другую вставную рукоятку 2122, регулируемый стопор 1801, зонд 2129 и датчик 2126, расположенный внутри или на теле 2129а зонда 2129. Вставная рукоятка 2122 прикреплена с возможностью отсоединения к ортопедическому имплантату, например, интрамедуллярному стержню. Зонд 2129 содержит кабель 2130 и разъем 2131 для соединения с процессором для использования при определении местоположения рельефных ориентиров интрамедуллярного стержня или другого имплантата. Зонд 2129 также содержит захват 2132, прикрепляющий кабель 2130 к телу 2129а и служащий для предотвращения повреждения датчика 2126 и/или электрического соединения между датчиком 2126 и кабелем 2130 силой натяжения, приложенной к кабелю 2130. Регулируемый стопор 1801 и альтернативный вариант стопора 1803 также проиллюстрированы на фиг.43 и 44. Как стопор 1801, так и стопор 1803 содержит привод 1802 пусковой кнопки. Стопор 1801 содержит поворотное колесо 1806, которое используется для вращения болта 1807 с резьбой для прикрепления стопора 1801 к вставной рукоятке, в то время как стопор 1803 содержит выпуклый захват 1804, также соединенный с болтом 2531 с резьбой (фиг.58). Зонд 2129 может быть снабжен фиксаторами или метками для обеспечения содействия пользователю в размещении зонда 2129 и датчика 2126 в правильном положении.
[0151] Система может содержать различные стопоры, например стопоры 1801, 1803, в зависимости от конкретного планируемого оперативного приема. Например, оперативный прием в случае ретроградного размещения интрамедуллярного стержня может использовать стопор 1801, причем для антеградного размещения на месте интрамедуллярного стержня может быть предпочтительно использован стопор 1803. Другие оперативные приемы могут потребовать другие варианты.
[0152] Как показано на фиг.45, регулируемый стопор 1803, вставная рукоятка 2123, и зонд 2129 изображены в собранном виде, прикрепленными к интрамедуллярному стержню 2125. Дистальный участок 2124 вставной рукоятки 2123 прикреплен к проксимальной головке 2126 интрамедуллярного стержня 2125. Вставная рукоятка 2123 соединена с интрамедуллярным стержнем 2125 с помощью канюлированного болта (не изображен). В альтернативном варианте вставная рукоятка 2123 может быть соединена с интрамедуллярным стержнем 2125 с помощью механизма быстроразъемного соединения или других крепежных устройств.
[0153] Регулируемый стопор 1803 прикреплен к проксимальной поверхности 2127 вставной рукоятки 2123. Регулируемый стопор 1803 имеет ответный стыковочный участок, так что когда стопор 1803 соединен с вставной рукояткой 2123, стопор 1803 расположен или фиксирован относительно вставной рукоятки 2123 с тремя степенями свободы. Зонд 2129 вставлен через отверстие 1805 регулируемого стопора 1803, через дистальный участок 2124 вставной рукоятки 2123, через канюлированный болт и в канюляцию (не изображена) интрамедуллярного стержня 2125. Зонд 2129 содержит датчик 2126 (фиг.42) расположенный вблизи дистального конца (не изображен). Датчик 2126 (фиг.42) соединен электрическим образом с кабелем 2130, содержащим разъем 2131 для передачи сигналов отдатчика 2126 (фиг.42) к контрольному модулю (не изображен).
[0154] Фиг.46 иллюстрирует регулируемый стопор 1801, вставную рукоятку 2122 и зонд 2129 в собранном виде, прикрепленными к интрамедуллярному стержню 2155. Регулируемый стопор 1801 прикреплен к проксимальной поверхности 2147 вставной рукоятки 2122 посредством вращения поворотного колеса 1806 для завинчивания болта 1807 (фиг.43) в резьбовом соединении (не изображено), образованном во вставной рукоятке 2122. Регулируемый стопор 1801 имеет ответный стыковочный участок, так что когда стопор 1801 соединен с вставной рукояткой 2122, стопор 1801 расположен или фиксирован относительно вставной рукоятки 2122 с тремя степенями свободы. Дистальный участок 2144 вставной рукоятки 2122 прикреплен к головке 2156 интрамедуллярного стержня 2155. Например, вставная рукоятка 2122 соединена с интрамедуллярным стержнем 2125 с помощью канюлированного болта (не изображен). Зонд 2129 вставлен через отверстие 1808 регулируемого стопора 1801, через дистальный участок 2144 вставной рукоятки 2122, через канюлированный болта и в головку 2156 интрамедуллярного стержня 2155.
[0155] На фиг.47 проиллюстрированы проксимальный зонд 2161 определения местоположения и дистальный зонд 2171 определения местоположения. Проксимальный зонд 2161 определения местоположения содержит ленточную основу 2163 и датчик 2165, расположенный внутри или на ленточной основе 2163 на заданном расстояние D1 от точки отсчета R1 основы 2163. Проксимальный зонд 2161 определения местоположения также содержит захват 2167 с цветовой маркировкой, указывающей, что зонд 2161 предназначен для определения местоположения проксимальных рельефных ориентиров ортопедического имплантата, например интрамедуллярного стержня 2155 фиг.46, и кабель 2169 для переноса сигнала от датчика 2165 к контрольному модулю (не изображен). Дистальный зонд 2171 определения местоположения содержит ленточную основу 2173, которая является более длинной, чем основа 2163 проксимального зонда 2161 определения местоположения. Датчик 2175 предусмотрен внутри или на ленточной основе 2173 на втором заданном расстоянии D2 от точки отсчета R2 основы 2173. Дистальный зонд 2171 определения местоположения также содержит захват 2177 с цветовой маркировкой, цвет которого отличается от цвета захвата 2167, и который указывает на то, что зонд 2171 предназначен для определения местоположения дистальных рельефных ориентиров ортопедического имплантата, например интрамедуллярного стержня 2155 фиг.46. Кабель 2179 предусмотрен для передачи сигнала от датчика 2175 к контрольному модулю (не изображен). Ленточная основа 2163 проксимального зонда 2161 определения местоположения и/или ленточная основа 2173 дистального зонда 2171 определения местоположения могут иметь, в некоторых вариантах реализации, прямоугольную геометрию, служащую для ориентации ленточной основы при ее размещении в канюляции интрамедуллярного стержня. Также может быть использована овальная, квадратная или круглая геометрические формы. В некоторых вариантах реализации ленточная основа 2163 и ленточная основа 2173 могут представлять собой пустую металлическую трубку. Вместо захватов с цветовой маркировкой в некоторых вариантах реализации каждый из датчиков 2165 и 2175 соединяется с микрочипом Постоянного Запоминающего Устройства (ПЗУ), на котором сохраняются калибровочные величины сдвига и также сохраняется идентификатор, определяющий, используется ли зонд для определения проксимального или дистального местоположения. При этом, когда каждый из датчиков 2165 и 2175 соединен с процессором, например процессором 2327 фиг.51, процессор автоматически определяет тип планируемого определения местоположения и может отобразить эту информацию на устройстве отображения, например на дисплее 2326.
[0156] Ленточная основа 2163 и ленточная основа 2173 могут содержать один или более изгибов для смещения, по меньшей мере, участка ленточной основы 2163 и ленточной основы 2173 относительно стенки канюляции ортопедического имплантата. Смещение участка ленточной основы относительно стенки канюляции повышает повторяемость размещения датчиков 2165 и 2175 относительно рельефных ориентиров. В альтернативном варианте зонды 2161 и/или 2171 могут быть выполнены с размерами приблизительно равными размерам канюляции интрамедуллярного стержня или другого имплантата, с которыми предполагается их использовать, так что может быть достигнуто повторяющимся образом надлежащее местоположение датчика внутри канюляции.
[0157] Представленный на фиг.48 и в качестве альтернативе паре зондов, представленных на фиг.47, зонд 2181 определения местоположения может быть использован для определения положения обоих дистального и проксимального рельефных ориентиров ортопедического имплантата. Зонд 2181 является трубчатым и выполнен из немагнитного металла, например нержавеющей стали. Зонд 2181 содержит ленточную основу 2183, первый датчик 2185, расположенный внутри дистального участка ленточной основы 2183, и второй датчик 2186, расположенный внутри проксимального участка ленточной основы 2183. Первый датчик 2185 расположен на расстоянии D3 от точки отсчета R3 основы 2183, которая может быть образована в виде выемки или фиксатора, и второй датчик расположен на втором расстоянии D4 от точки отсчета R3.
[0158] Первый датчик 2185 используется для определения положения дистального рельефного ориентира ортопедического имплантата, например дистального фиксирующего отверстия интрамедуллярного стержня, а второй датчик 2186 используется для определения положения проксимального рельефного ориентира ортопедического имплантата, например проксимального фиксирующего отверстия ортопедического стержня. В некоторых вариантах реализации конструкция зонда 2181 может быть аналогична дистальному зонду 2171 определения местоположения (фиг.47), с добавлением второго датчика 2186. Зонд 2181 также содержит захват 2187, который может иметь цветовую маркировку для его отличия от дистального зонда 2171 определения местоположения и для индикации того, что зонд 2181 может быть использован для определения положения обоих дистального и проксимального рельефных ориентиров имплантата. Как упомянуто выше, каждый из датчиков 2185 и 2186 может быть соединен с ПЗУ или другим устройством хранения, сохраняющим контрольные величины для использования при определении положения определителя рельефного ориентира, например определителя 2016 рельефного ориентира, относительно рельефного ориентира имплантата. ПЗУ также сохраняют идентификаторы, что позволяет процессору определить, был ли полученный сигнал сгенерирован дистальным датчиком 2185 или проксимальным датчиком 2186.
[0159] Другой альтернативный вариант зонда 2191 представлен на фиг.49. Зонд 2191 содержит корпус 2192 и выполненную с возможностью втягивания/выдвижения основу 2193, которая может быть смотана в корпусе 2192. Датчик 2195, расположенный внутри основы 2193, может быть размещен в первом положении Р1 для определения местоположения проксимальной рельефного ориентира имплантата и может быть размещен во втором положении Р2 для определения местоположения дистальной рельефного ориентира имплантата. В некоторых вариантах реализации основа 2193 может быть образована вогнутой металлической лентой, которая стремиться сохранять по существу прямую форму, когда она выходит из корпуса, но может также быть смотана в корпусе 2192. Например, основа 2193 может содержать слоистые, гибкие стальные бистабильные пружинные полоски, которые при выпрямлении создают напряжение внутри пружинных металлических полосок для удержания основы в выпрямленном положении, но сворачиваются в корпус 2192, когда напряжение ослабляется. Однако для образования основы могут быть использованы другие типы материалов, включая упругий пластик или резиновые трубки или листы. В другом альтернативном варианте основа 2192 образована из нескольких вмонтированных сегментов рукавов, которые могут выдвигаться или втягиваться посредством скольжения внутри прилегающих сегментов рукавов. Зонд 2191 может содержать ротационное кодирующее устройство, оптическое устройство или другие измерительные устройства или способы для определения длины основы 2193, выходящей на настоящий момент из корпуса 2192. Определенная длина может быть использована для определения, размещен ли датчик 2195 в требуемом положении, например первом положении Р1 или втором положении Р2.
[0160] Как показано на фиг.50, регулируемый стопор 1801 прикреплен к альтернативному варианту вставной рукоятки 2210. Вставная рукоятка 2210 содержит основу 2211, находящуюся в сцеплении с головкой 2156 интрамедуллярного стержня 2155 (также изображенного на фиг.46). Например, для присоединения вставной рукоятки 2210 к головке 2156 может быть использован канюлированный болт (не изображен). Вставная рукоятка 2210 содержит датчик 2213 для использования при определении местоположения проксимальной рельефного ориентира стержня 2155, например проксимального фиксирующего отверстия 2157. Датчик 2213 расположен внутри или на основе 2211 на заданном расстоянии D5 от проксимального фиксирующего отверстия 2157, когда вставная рукоятка прикреплена к стержню 2155. Датчик может быть пассивным или электрически запитанным от внутренней батареи (не изображена) или внешнего блока питания (не изображен). Датчик 2213 может быть установлен в камере, объединенной или составляющей единое целое с основой 2211, например во внешней камере 2216. В альтернативном варианте, датчик 2213 может быть расположен во внутренней камере 221 За, изображенной на фиг.51. Вставная рукоятка 2210 выполнена из пластика, но в альтернативном варианте могут быть использованы другие материалы.
[0161] Регулируемый стопор 1801 используется с зондом, например, с зондом 2129 (фиг.46), для определения местоположения дистальных рельефных ориентиров стержня 2155, например дистального отверстия 2159 (фиг.51). Как описано выше, регулируемый стопор 1801 может быть прикреплен к вставной рукоятке 2210 посредством болта 1807 (фиг.43), который входит в сцепление с резьбовым просверленным отверстием 2215, выровненным с продольным сквозным отверстием вставной рукоятки 2210 (не изображена), что обеспечивает прохождение зонда через вставную рукоятку 2210 и в канюляцию 2155а (фиг.51) стержня 2155. Регулируемый стопор 1801 также содержит рычаг 1809, который входит в сцепление с основой 2211, что предотвращает вращение между регулируемым стопором 1801 и вставной рукояткой 2210.
[0162] Хотя это и не проиллюстрировано, регулируемый стопор 1803 (изображенный на фиг.45) может также быть использован со вставной рукояткой, содержащей встроенный датчик для определения местоположения проксимальных рельефных ориентиров имплантата.
[0163] При использовании, ортопедический имплантат, например интрамедуллярный стержень 2155, имплантируется в кость. Вставная рукоятка 2210 может быть соединена с ортопедическим имплантатом до или после имплантации. После этого определитель рельефного ориентира может быть использован для определения местоположения проксимальных рельефных ориентиров ортопедического имплантата.
[0164] В некоторых вариантах реализации дистальные рельефные ориентиры находят раньше, чем проксимальные рельефные ориентиры. Как и ранее, вставная рукоятка 2210 может быть соединена с ортопедическим имплантатом до или после имплантации. Стопор 1801 или стопор 1803 соединен со вставной рукояткой 2210. Зонд вставлен в стопор через вставную рукоятку 2210 и в ортопедический имплантат, например стержень 2155. Сначала находят дистальные рельефные ориентиры, для удержания ортопедического имплантата в дистальных рельефных ориентирах размещают трансфиксационные элементы, зонд удаляют, а затем находят проксимальные рельефные ориентиры.
[0165] На фиг.51 проиллюстрирована система 2300 для определения местоположения скрытого рельефного ориентира ортопедического имплантата. Система 2300 содержит регулируемый стопор 1801, зонд 2171 и вставную направляющую 2210, собранные и соединенные с интрамедуллярным стержнем 2155, который имплантирован в кость В, имеющую трещину F. Интрамедуллярный стержень 2155 содержит дистальное отверстие 2159, проходящее через интрамедуллярный стержень 2155 и предназначенное для приема фиксирующего крепежа (не изображен). Зонд 2171 проходит через отверстие или регулируемый стопор 1801, через канюляцию 2210а вставной рукоятки 2210 и внутрь канюляции 2155а интрамедуллярного стержня 2155. Зонд 2171 входит внутрь стопора 1801 так, что датчик 2175 размещен на известном расстоянии от дистального отверстия 2159. Известное расстояние может лежать в промежутке от 0 до около 102 миллиметров от датчика 2175 до дистального отверстия 2159 или другой рельефного ориентира. В других вариантах реализации известное расстояние может лежать в промежутке от около двух миллиметров до около 25 миллиметров или от около трех миллиметров до около 10 миллиметров. В изображенном варианте реализации известное расстояние составляет около пяти миллиметров.
[0166] Система 2300 также содержит инструмент, например сверло 2310, содержащее головку сверла 2311. Определитель 2016 рельефного ориентира может удерживать сверло 2310 и/или головку сверла 2311 так, что положение и ориентация определителя 2016 рельефного ориентира может быть использована для задания положения и ориентации сверла 2310 и/или головки сверла 2311. Например, корпус определителя 2016 рельефного ориентира может иметь фрикционное сцепление со сверлом 2310, хомут или другой механизм фиксации для прикрепления, по меньшей мере, временно определителя 2016 рельефного ориентира к сверлу 2310. В других вариантах реализации определитель 2016 рельефного ориентира может составлять единое целое со сверлом 2310 или другим инструментом. В некоторых вариантах реализации обойма сверла (не изображена) может выдвигаться для того, чтобы обеспечить пользователю возможность размещения кончика обоймы сверла напротив пациента, а также обеспечить пользователю перемещение головки сверла в продольном направлении для сверления.
[0167] Система 2320 определения местоположения работает таким образом, чтобы обеспечить пользователю, например хирургу, индикацию об относительном положении инструмента, например сверла 2310, содержащего головку 2311 сверла, относительно дистального отверстия 2159. Система 2320 определения местоположения содержит корпус 2321, порт 2322 первого датчика, порт 2323 второго датчика, порт 2324 генератора поля, устройство 2325 отображения и процессор 2327. Порт 2322 первого датчика предназначен для приема разъема кабеля 2179 зонда 2171, так что система 2320 определения местоположения получает сигналы, генерируемые датчиком 2175. Порт 2323 второго датчика предназначен для приема разъема кабеля 2214, соединенного с датчиком 2213 вставной рукоятки 2210, так что система 2320 определения местоположения получает сигналы, генерируемые датчиком 2213. Порт 2324 генератора поля предназначен для приема разъема кабеля 2019 определителя 2016 рельефного ориентира так, что система 2320 определения местоположения передает сигналы по кабелю 2019 для контроля работы генератора поля определителя 2016 рельефного ориентира. Устройство 2325 отображения предназначено для выведения изображения графического интерфейса 2326 пользователя, содержащего представление о положении и ориентации сверла 2310 относительно местоположению и ориентации рельефного ориентира интрамедуллярного стержня 2155, например дистального отверстия 2159, проксимального отверстия 2157 (фиг.50), или другой рельефного ориентира.
[0168] Процессор 2327 предназначен для приема сигналов от дистального датчика 2175 и/или проксимального датчика 2213 и для определения, на основании принятого сигнала (сигналов), текущего положения и ориентации определителя 2016 рельефного ориентира относительно выбранного рельефного ориентира интрамедуллярного стержня 2155. Например, характеристика сигнала, принятого от дистального датчика 2175, например один или более индуцированный электрический ток, может быть использован процессором 2327 для определения расстояния определителя 2016 рельефного ориентира от датчика 2175, а также ориентации магнитного момента поля, генерируемого определителем 2016 рельефного ориентира. Например, датчик 2175 может передавать сигнал, указывающий текущую величину, и идентификатор, указывающий на то, какая из нескольких индукционных катушек выработала соответствующую текущую величину. Процессор 2327 может сравнивать полученные текущие величины с контрольными величинами, соответствующими каждой индукционной катушке, для определения отличия между принятыми величинами и контрольными величинами. Контрольные величины могут быть величинами индуцированного тока, соответствующего контрольному сигналу генерируемого поля, контрольного положения и контрольной ориентации определителя 2016 рельефного ориентира. Процессор 2327 использует эти полученные отличие между принятыми и контрольными величинами для определения отличия положения и ориентации определителя 2016 рельефного ориентира относительно контрольного положения и ориентации на основании любого полученного отличия магнитного поля, генерируемого определителем 2016 рельефного ориентира, от контрольного поля. На основании отличия между положением и ориентацией определителя 2016 рельефного ориентира и контрольным положением и ориентацией, процессором 2327 может быть определено текущие положение и ориентация определителя 2016 рельефного ориентира относительно датчика 2175.
[0169] Текущие расстояние и ориентация определителя 2016 рельефного ориентира относительно датчика 2175 используются процессором 2327 для определения текущего расстояния определителя 2016 рельефного ориентира от дистального отверстия 2159 и текущей относительной ориентации магнитного момента генерируемого магнитного поля относительно центральной сквозной оси дистального отверстия 2159. Например, процессор 2327 определяет текущее расстояние и относительную ориентацию определителя 2016 рельефного ориентира относительно дистального отверстия 2159 на основании известного положения и ориентации дистального отверстия 2159 относительно дистального датчика 2175. Процессор 2327 также определяет текущее положение сверла 2310, имеющего головку 2311 сверла, относительно дистального отверстия 2159, а также текущую ориентацию сверла 2310 и головки 2311 сверла относительно центральной сквозной оси дистального отверстия 2159 на основании известного положения и ориентации сверла 3210 и головки 2311 сверла относительно местоположения определителя 2016 рельефного ориентира и магнитного момента поля, генерируемого определителем 2016 рельефного ориентира. В случае определителя 2016 рельефного ориентира продольная ось головки 2311 сверла коаксиальна с магнитным моментом магнитного поля, генерируемого определителем 2016 рельефного ориентира.
[0170] Графический интерфейс 2326 пользователя создается процессором на основании определенного текущего положения и ориентации сверла 2310 и головки 2311 сверла относительно дистального отверстия 2159 или на основании текущего положения и ориентации другого инструмента относительно другого рельефного ориентира. Графический интерфейс 2326 пользователя содержит первый участок 2326а, содержащий изображение 2155b интрамедуллярного стержня, отображающее интрамедуллярный стержень 2155, и содержит изображение 2159а дистального отверстия, отображающее дистальное отверстие 2159. Первый участок 2326а графического интерфейса 2326 пользователя также содержит индикатор 2330 ориентации, содержащий первую окружность 2331, вторую окружность 2333 и линию 2335, пересекающую центры как первой окружности 2331, так и второй окружности 2333. Линия 2335 иллюстрирует пользователю текущую ориентацию головки 2311 сверла относительно центральной сквозной оси дистального отверстия 2159. В частности, когда и первая окружность 2331 и вторая окружность 2333, вместе расположены внутри изображения 2159а дистального отверстия, то продольная ось головки 2311 сверла является коаксиальной с центральной сквозной осью дистального отверстия 2159, как изображено на фиг.51. Графический интерфейс 2326 пользователя также содержит второй участок 2326b, содержащий изображение 2155b интрамедуллярного стержня и изображение 2331b головки сверла. Текущее положение и ориентация головки 2311 сверла относительно интрамедуллярного стержня 2155 проиллюстрированы на втором участке 2326b графического интерфейса 2326 пользователя.
[0171] При использовании зонд 2155, вставная рукоятка 2210, регулируемый стопор 1801, определитель 2016 рельефного ориентира, сверло 2310, и головка 2311 сверла могут быть стерилизованы, например, посредством обработки в автоклаве, если один или более компонентов не являются стерильными. После стерилизации зонд 2155 соединяют с портом 2322 первого датчика системы 2320 определения местоположения и вставную рукоятку 2210 соединяют с портом 2323 второго датчика системы 2320 определения местоположения. Процессор 2327 детектирует соединение дистального датчика 2175 и проксимального датчика 2213 и может опционально вызвать отображение индикации надлежащего (или ненадлежащего) соединения зонда 2155 и вставной рукоятки 2210 и/или индикации надлежащего (или ненадлежащего) работы дистального датчика 2175 и проксимального датчика 2213. Аналогичным образом, определитель 2016 рельефного ориентира соединен с портом 2324 генератора поля, и процессор может детектировать соединение определителя 2016 рельефного ориентира и вызвать отображение надлежащего (или ненадлежащего) соединения определителя 2016 рельефного ориентира и/или надлежащей (или ненадлежащей) работы генератора поля определителя 2016 рельефного ориентира. Датчик 2175 соединен с микрочипом Постоянного Запоминающего Устройства (ПЗУ), которое сохраняет калибровочные величины, а также сохраняет идентификатор, который определяет, что датчик 2175 является дистальным датчиком определения местоположения. Когда датчик соединен с процессором 2327, процессор 2327 автоматически определяет тип предполагаемого определения местоположения и может отображать индикацию на графическом интерфейсе 2326 пользователя о том, что подсоединен датчик идентифицированного типа.
[0172] Вставная рукоятка 2210 входит в сцепление с интрамедуллярным стержнем 2155, а регулируемый стопор 1801 входит в сцепление с вставной рукояткой 2210. Зонд 2155 затем вставляют в регулируемый стопор 1801 и размещают в требуемом местоположении. Манипуляция кнопкой 1802 зонда 2155 обеспечивает его регулировку, и кнопку 1802 отпускают для захвата зонда 2155 в требуемом положении. Например, зонд 2155 может быть вставлен до контрольной метки, например печатной метки или фиксатора или другой структуры зонда 2155, и правильно размещен относительно контрольного участка регулируемого стопора 1801. Посредством размещения зонда 2155 дистальный датчик 2175 размещается в правильном положении относительно дистального отверстия 2159.
[0173] Обойму 2022 сверла выбирают и вводят в зацепление с насадкой 2020 обоймы сверла определителя 2016 рельефного ориентира. Например, выбирают один из следующих элементов: короткая обойма сверла или длинная обойма сверла. Информация о сделанном выборе вводится в систему 2320 определения местоположения, например посредством взаимодействия с меню 2326 с графического интерфейса 2326 пользователя. Дополнительно, информация о наличии определенных вариантов интрамедуллярного стержня 2155, вставной рукоятки 2210, регулируемого стопора 1801 и/или зонда 2171 вводится в систему 2320 определения местоположения, если это автоматически не распознается системой 2320 определения местоположения и/или подтверждается наличие определенных вариантов интрамедуллярного стержня 2155, вставной рукоятки 2210, регулируемого стопора 1801 и/или зонда 2171.
[0174] Точность системы 2320 определения местоположения проверяют до имплантации интрамедуллярного стержня 2155 посредством размещения определителя 2016 рельефного ориентира непосредственно над дистальным отверстием 2159 интрамедуллярного стержня 2155, что может быть реализовано посредством введения кончика 2024 обоймы сверла 2022 внутрь дистального отверстия 2159. Если вторая окружность 2333 отображается внутри изображения 2159а дистального отверстия, и если ориентация линии 2335 соответствует ориентации обоймы сверла 2022, то система 2320 определения местоположения является точной. Если система определения местоположения не является точной, то проверяют введенную информацию о выбранных компонентах и/или положении зонда 2171. Если ошибок не обнаружено, то систему 2320 определения местоположения калибруют заново, как описано ниже с ссылками на фиг.52.
[0175] Когда компоненты собраны и проверены, как раскрыто выше, интрамедуллярный стержень 2155 имплантируют в кость В. Когда интрамедуллярный стержень 2155 расположен в требуемом положении, кончик 2024 обоймы сверла 2022 размещен над дистальным отверстием 2159. Когда определитель 2016 рельефного ориентира приближают к датчику 2175, сигнал, генерируемый датчиком 2175, принимается процессором 2327, и одна или более характеристик сигнала, например текущая величина и идентификатор, используются процессором для определения того, что выполняется определение дистального местоположения и что система 2320 определения местоположения переходит в режим определения дистального местоположения. Размещение кончика 2024 относительно дистального отверстия 2159, который скрыт внутри кости В, выполняется пользователем посредством сравнения с графическим интерфейсом 2326 пользователя в режиме определения дистального местоположения и подтверждается, когда первая окружность 2331 и вторая окружность 2333 расположены внутри изображения 2159а дистального отверстия.
[0176] На месте дистального отверстия 2159 выполняют разрез в коже. Обойму 2022 сверла затем вставляют в разрез до кости В. Определитель 2016 рельефного ориентира затем передвигается пользователем до размещения первой окружности 2331 и второй окружности 2333 полностью внутри изображения 2159а дистального отверстия и, сохраняя положение и ориентацию определителя 2016 рельефного ориентира, головка 2311 сверла вставляется с помощью обоймы 2022 сверла и пользователь сверлит насквозь кость В через дистальное отверстие 2159 до наружного слоя дальней стороны кости В. Требуемая глубина сверления может быть достигнута пользователем посредством контроля второго участка 2326b, или сравнения одной или более контрольных меток, содержащихся на головке 2311 сверла, с контрольным участком определителя 2016 рельефного ориентира.
[0177] Головку 2311 сверла затем удаляют, а фиксирующий крепеж (не изображен) вводят в сцепление с костью В и дистальным отверстием 2159 посредством обоймы 2022 сверла, также сохраняя первую окружность 2331 и вторую окружность 2333 внутри изображения 2159а дистального отверстия. Необходимая глубина введения фиксирующего крепежа может быть достигнута пользователем посредством контроля второго участка 2326b графического интерфейса 2326 пользователя или посредством сравнения контрольной маркировки на крепежном ведущем инструменте (не изображен) с контрольным участком определителя 2016 рельефного ориентира.
[0178] Дополнительно для сцепления фиксирующего крепежа с дистальным отверстием 2159 система 2320 определения местоположения может быть использована для определения положения проксимального рельефного ориентира интрамедуллярного стержня 2155. Например, до или после введения в сцепления фиксирующего крепежа с дистальным отверстием 2159 и костью В пользователь может выбрать датчик 2213 из меню 2326 с или переместить определитель 2016 рельефного ориентира на заданное расстояние датчика 2213, что вызывает переход системы 2320 определения местоположения в режим определения проксимального местоположения и вывод отображения относительного положения и ориентации сверла 2300 и/или головки сверла 2016 относительно проксимальной рельефного ориентира интрамедуллярного стержня 2155, например проксимального отверстия 2157 (фиг.50). Пользователь может затем ввести в сцепление крепеж или другой инструмент или имплантат с проксимальным рельефным ориентиром аналогично описанному выше способу, касающемуся сверления сквозного дистального отверстия 2159 и/или введения в сцепление фиксирующего крепежа с дистальным отверстием 2159.
[0179] Как описано выше проксимальный рельефный ориентир может быть определен с помощью системы 2320 определения местоположения и датчика 2213 до или после определения местоположения дистальной рельефного ориентира, например дистального отверстия 2159. В частности, проксимальный рельефный ориентир может быть определен до введения зонда 2171 внутрь регулируемого стопора 1801, вставной рукоятки 2210 и/или интрамедуллярного стержня 2155. Проксимальный рельефный ориентир может также быть определен после удаления зонда 2171, или во время введения зонда 2171 внутрь регулируемого стопора 1801, вставной рукоятки 2210, и/или интрамедуллярного стержня 2155. Например, как упомянуто выше, зонд 2171 может быть введен через участок интрамедуллярного стержня 2155, который не взаимодействует с захватом головки 2311 сверла или с крепежом с проксимальным отверстием или с другой проксимальным рельефным ориентиром. Дополнительно, если зонд 2171 введен в канюляцию 2155а, а проксимальное отверстие также проходит через канюляцию 2155а, канюляция 2155а может быть достаточно большой, чтобы одновременно вмещать как крепеж или головку 2311 сверла, так и зонд 2171. например, зонд 2171 может иметь такой размер, чтобы разместиться в промежутке между головкой 2311 сверла и внутренней стенкой интрамедуллярного стержня 2155, ограничивающей канюляцию 2155а. Аналогичным образом, зонд 2181 (фиг.48), имеющий как дистальный датчик 2185, так и проксимальный датчик 2186, может быть вставлен в канюляцию 2155а и как дистальный, так и проксимальный рельефные ориентиры интрамедуллярного стержня 2155 могут быть определены без удаления или регулировки зонда 2181.
[0180] В альтернативном варианте проксимальный рельефный ориентир интрамедуллярного стержня 2155 может быть определен с помощью системы 2320 определения местоположения и любым из датчиков: датчиком 2175 зонда 2171 или датчиком 2165 зонда 2161 (фиг.47). Например, после введения в сцепления фиксирующего зажима с дистальным отверстием 2159, зонд 2171 может быть отрегулирован с помощью регулируемого стопора 1801 для прикрепления датчика 2175 в заданном местоположение относительно одного или более проксимальных рельефных ориентиров интрамедуллярного стержня 2155. Затем может быть использовано меню 2326 с для выбора режима определения проксимального местоположения так, что при этом система 2320 определения местоположения функционирует для отображения положения и ориентации сверла 2310 и/или головки 2311 сверла (или другого инструмента или имплантата) относительно проксимальной рельефного ориентира (точек). Аналогичным образом, и, в частности, когда нежелательно, чтобы участок зонда 2171 выступал от регулируемого стопора 1801, зонд 2161 может быть соединен с системой 2320 определения местоположения и вставлен в регулируемый стопор 1801, так что датчик 2165 располагается в известном местоположении относительно одной или более проксимальной рельефного ориентира интрамедуллярного стержня 2155. В любом случае, один или более проксимальный рельефный ориентир интрамедуллярного стержня могут затем быть определены с помощью системы 2320 определения местоположения, как описано выше. В других вариантах реализации проксимальный рельефный ориентир (ориентиры) может быть определен до дистального отверстия 2159 с помощью зонда 2171 или зонда 2161.
[0181] Как показано на фиг.52, калибровочный элемент 2340 прикрепляют к определителю 2016 рельефного ориентира и интрамедуллярному стержню 2155 для использования для калибровки системы 2320 определения местоположения. Например, если точность системы 2320 определения местоположения проверена до введения интрамедуллярного стержня 2155 и найдена погрешность, система 2320 определения местоположения может быть повторно откалибрована. В рабочем положении калибровочный элемент 2340 находится в сцеплении с определителем 2016 рельефного ориентира. Затем кончик 2341 вставляют в дистальное отверстие 2159 до тех пор, пока контрольной участок (не изображен) калибровочного элемента 2340 не упрется в интрамедуллярный стержень 2155. Повторная калибровка системы 2320 определения местоположения может затем быть реализована посредством взаимодействия с меню 2326 с графического интерфейса 2326 пользователя. Например, из меню 2326 с может быть выбран вариант "повторная калибровка", что вызывает передачу системой 2320 определения местоположения ведущего сигнала на генератор поля определителя 2016 рельефного ориентира и сохранение в качестве контрольных величин любых текущих величин, принятых от датчика 2175 зонда 2171. Графический интерфейс 2326 пользователя может отображать индикацию об успешной повторной калибровке системы 2320 определения местоположения.
[0182] На фиг.53-57 проиллюстрированы детали регулируемого стопора 1801. Регулируемый стопор 1801 содержит корпус 2401, содержащий прорезь 2402 зажимного элемента. Зажимной элемент 2411 входит внутрь прорези 2402 зажимного элемента и смещается пружиной 2413. Зажимной элемент 2411 удерживается в корпусе 2401 посредством штырей 2415. Зажимной элемент 2411 также содержит прорезь 2417 привода, соединительное отверстие 2418 и отверстие 2419 зонда.
[0183] Кнопка 1802 содержит приводной валик 2421 и приводную прорезь 2423. Приводной валик 2421 проходит внутрь отверстия 2405 корпуса 2401 и смещается относительно вставки в корпусе посредством пружины 2425. В собранном виде приводной валик 2421 проходит в приводную прорезь 2417 зажимного элемента 2411 и удерживается в корпусе 2401 посредством соединительного штыря 2427, вставленного в приводную прорезь 2423 приводного валика 2421 через отверстие 2403 корпуса 2401 и через соединительное отверстие 2418 зажимного элемента 2411. В рабочем положении, когда кнопка 1802 прижата смещающей силой пружины 2425, соединительный штырь 2427 перемещается внутрь приводной прорези 2423, что толкает зажимной элемент 2411 пружиной 2413 для обеспечения введения зонда в отверстие 1808 и через отверстие 2419 зонда. Когда зонд вставлен, и кнопка 1802 отпущена, пружины 2413 и 2425 приводят к тому, что зажимной элемент 2411 упирается в зонд для сохранения положения зонда внутри отверстия 1808.
[0184] Поворотное колесо 1806 располагается внутрь прорези 2407 поворотного колеса корпуса 2401, а болт 1807 завинчивается в резьбовое отверстие 2431 поворотного колеса 1806 через отверстие 2409 болта корпуса 2401. После того, как болт 1807 завинчен в отверстие 2431 болта, штырь 2433 вставляют через отверстие 2435 (фиг.56) поворотного колеса 1806 и в прорезь 2437 (фиг.56) болта 1807 для удержания болта 1807 в сцеплении с поворотным колесом 1806.
[0185] На фиг.58-62 проиллюстрированы детали регулируемого стопора 1803. Регулируемый стопор 1803 содержит корпус 2501, содержащий прорезь 2502 зажимного элемента. Зажимной элемент 2511 проходит внутрь прорези 2502 зажимного элемента и смещается пружиной 2513. Зажимной элемент 2511 удерживается в корпусе 2501 посредством штырей 2515. Зажимной элемент 2511 также содержит прорезь 2517 привода, соединительное отверстие 2518 и отверстие 2519 зонда.
[0186] Кнопка 1802 содержит приводной валик 2421 и приводную прорезь 2423. Приводной валик 2421 проходит внутрь отверстия 2405 корпуса 2401 и смещается относительно вставки в корпусе посредством пружины 2525. В собранном виде приводной валик 2421 находится в приводной прорези 2517 зажимного элемента 2511 и удерживается в корпусе 2501 посредством соединительного штыря 2527, вставленного в приводную прорезь 2423 приводного валика 2421 через отверстие 2503 корпуса 2401 и через соединительное отверстие 2418 зажимного элемента 2511. В рабочем положении, когда кнопка 1802 прижата смещающей силой пружины 2525, соединительный штырь 2527 перемещается внутрь приводной прорези 2423, что толкает зажимной элемент 2511 пружиной 2513 для обеспечения введения зонда в отверстие 1805 и через отверстие 2519 зонда. Когда зонд вставлен, и кнопка 1802 отпущена, пружины 2513 и 2525 приводят к тому, что зажимной элемент 2511 упирается в зонд для сохранения положения зонда внутри отверстия 1805.
[0187] Болт 2531 с резьбой зажимной ручки 1804 завинчен в отверстие 2509 болта корпуса 2501 для прикрепления регулируемого стопора 1803 к вставной рукоятке.
[0188] Калибровка системы может быть выполнена во время изготовления после продажи или непосредственно перед имплантацией имплантата. Шаг калибровки аналогичен регистрации в служебном компьютере клиники. Калибровки может быть необходима по различным причинам. Например, калибровка датчика может быть необходима для исправления погрешностей при изготовлении. Система может быть выполнена на основании модели компьютерного проектирования, и калибровка используется для точного размещения датчиков относительно друг друга. Процессор или контрольный модуль может содержать программное обеспечение для генерации величин сдвига по X, Y, Z (тангаж, крен и рыскание) для размещения датчиков в глобальной системе координат или просто для размещения друг относительно друга. Система может быть изготовлена и откалибрована во время изготовления и ей приписывается уникальный идентификатор, например серийный номер, цветовая кодировка, штрих-код или метка радиочастотного определителя (RFID). Если система должна быть повторно откалибрована, уникальный определитель может быть использован для получения величин сдвига локально или по сети. Дополнительно уникальный определитель может быть использован для получения других данных, например размера интрамедуллярного стержня или длины интрамедуллярного стержня и/или зонда.
[0189] Системы для определения местоположения рельефного ориентира могут быть использованы для других целей, помимо определения местоположения скрытых винтовых отверстий имплантируемого интрамедуллярного стержня. Они включают, но не ограничены, определение местоположения блокировочных винтов и выравнивания направляющих штырей. В одном варианте, блокировочные (тестовые) винты могут быть вставлены в кости непосредственно снаружи и касаться стержня или штока. Определяемые местоположения изображаются в виде двух линий на экране с противоположных сторон стержня, например передней-задней (А-Р) или медиальной-латеральной (M-L), и сдвинутыми относительно стержня на расстоянии, например, 2,5 мм. Хирург выравнивает определитель рельефного ориентира с одной из линий, определяемой анатомической стороной, с которой он или она желают разместить блокировочный винт. Для отображения местоположения на экране могут быть использованы другие символы или индикация, например точки, линзообразные фигуры или их сочетания. Для этой цели могут быть использованы устройства, выполненные с возможностью введения в медуллярный канал и снабженные датчиком или датчиками в качестве средств для определения положения блокировочных винтов, включая, но не ограничиваясь, зонд, редуктор или шило. Изображенные системы для определения местоположения рельефного ориентира могут быть также использованы для выравнивания или центрирования направляющего штыря как в плоскости А-Р, так и в плоскости M-L для размещения стягивающего винта на проксимальном участке бедренного стержня. Примеры вариантов реализации этой системы могут содержать датчик, размещенный при известной ориентации и местоположении относительно к и внутри вставной рукоятки и/или направляющей сверла и/или выравнивающей опорной пластины, прикрепленных с возможностью отсоединения к проксимальному участку бедренного стержня.
[0190] В то время как фиг.1 иллюстрирует карман для фиксации первого датчика к имплантату, другие структуры и/или способы могут быть использованы для скрепления этих элементов вместе. Например, для размещения первого датчика в соответствующем положении могут быть использованы зонды различной длины, как проиллюстрировано на фиг.42. Регулируемые стопоры 1801, 1803 фиг.41-42 могут быть использованы для точного размещения датчика 2126 в имплантате 30.
[0191] В то время как были приведены только определенные варианты реализации, на основании данного описания специалистам в данной области техники будут очевидны альтернативные варианты и модификации. Эти и другие альтернативные варианты считаются эквивалентами и принадлежащими по сути к области патентной защиты данного изобретения и прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ОРИЕНТИРА | 2010 |
|
RU2568739C2 |
| НАЦЕЛИВАНИЕ НА ОПОЗНАВАТЕЛЬНЫЕ ТОЧКИ ОРТОПЕДИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2627677C2 |
| КОМПОЗИТНЫЙ ВНУТРЕННИЙ ФИКСАТОР | 2009 |
|
RU2545424C2 |
| ОРТОПЕДИЧЕСКИЙ ИМПЛАНТАТ И КРЕПЕЖНОЕ ПРИСПОСОБЛЕНИЕ | 2010 |
|
RU2580978C2 |
| ОРТОПЕДИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2018 |
|
RU2766758C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ УПРАВЛЯЕМОГО РАЗМЕЩЕНИЯ ИГОЛЬНЫХ КОНСТРУКЦИЙ В ТКАНИ | 2013 |
|
RU2747356C2 |
| ИНТРАМЕДУЛЛЯРНЫЙ ФИКСАТОР ДЛЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ОКОЛОСУСТАВНЫХ ПЕРЕЛОМОВ ТРУБЧАТОЙ КОСТИ | 2010 |
|
RU2468764C2 |
| ВИНТОВОЙ ИМПЛАНТАТ ДЛЯ ОСТЕОСИНТЕЗА ШЕЙКИ БЕДРЕННОЙ КОСТИ | 2015 |
|
RU2582980C1 |
| НЕРОВНОСТЬ, ВЫРЕЗАННАЯ НА КРОМКЕ ОТВЕРСТИЯ | 2013 |
|
RU2647780C2 |
| Способ дистального блокирования интрамедуллярных имплантатов | 2022 |
|
RU2799129C1 |
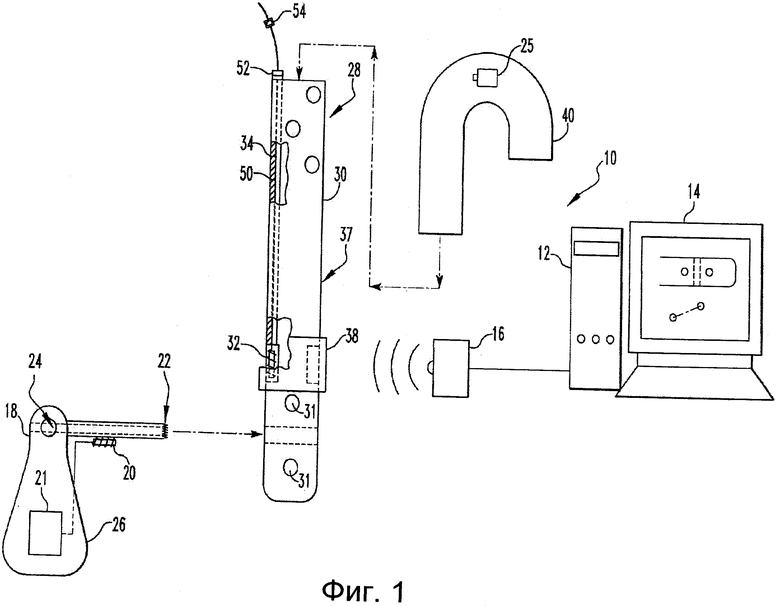
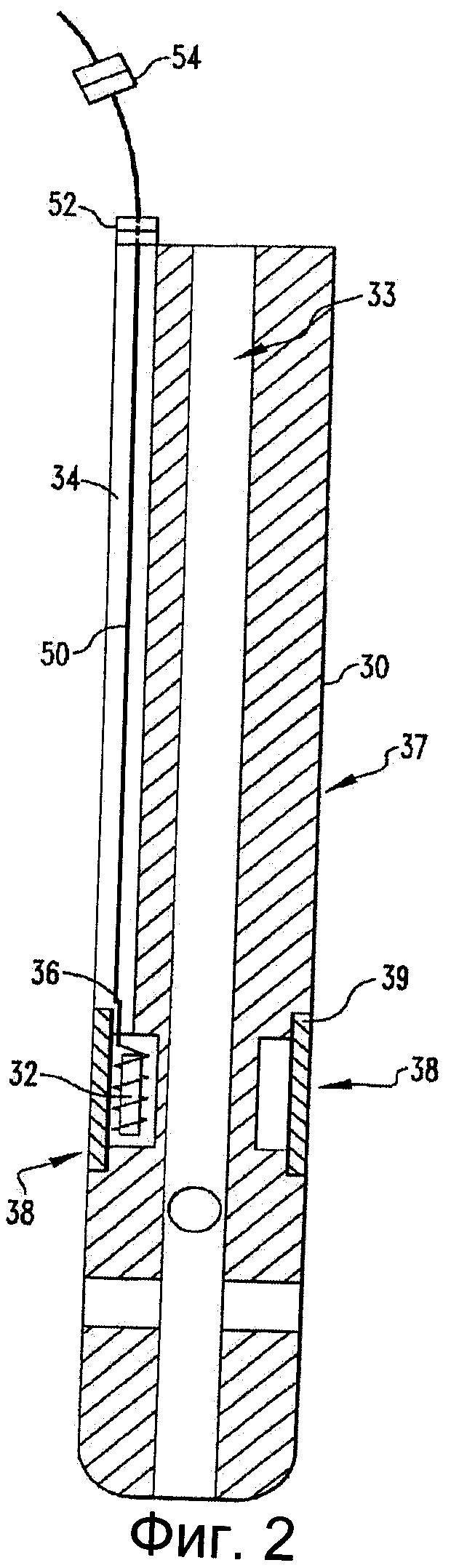


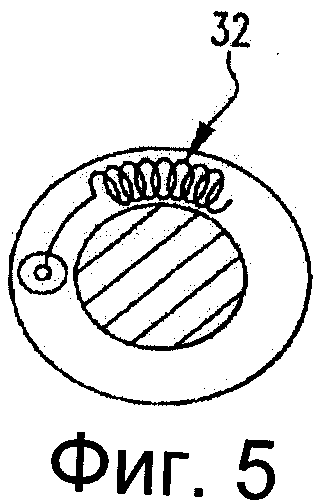



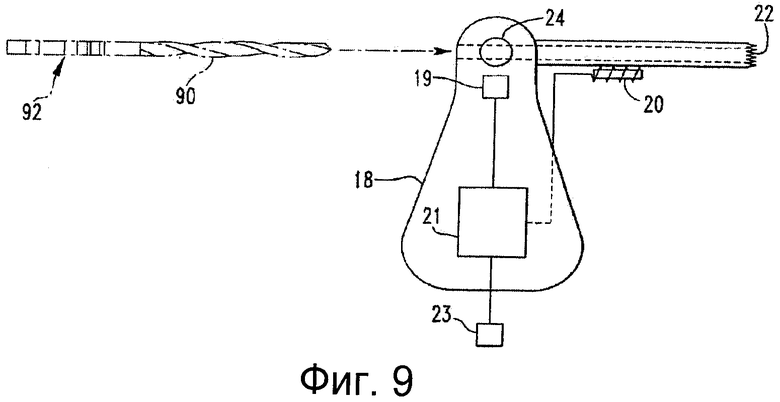


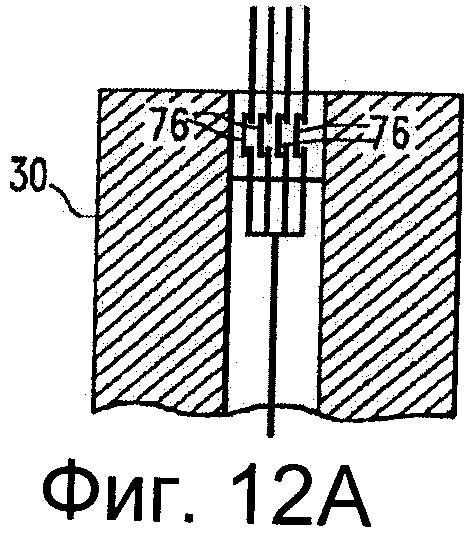
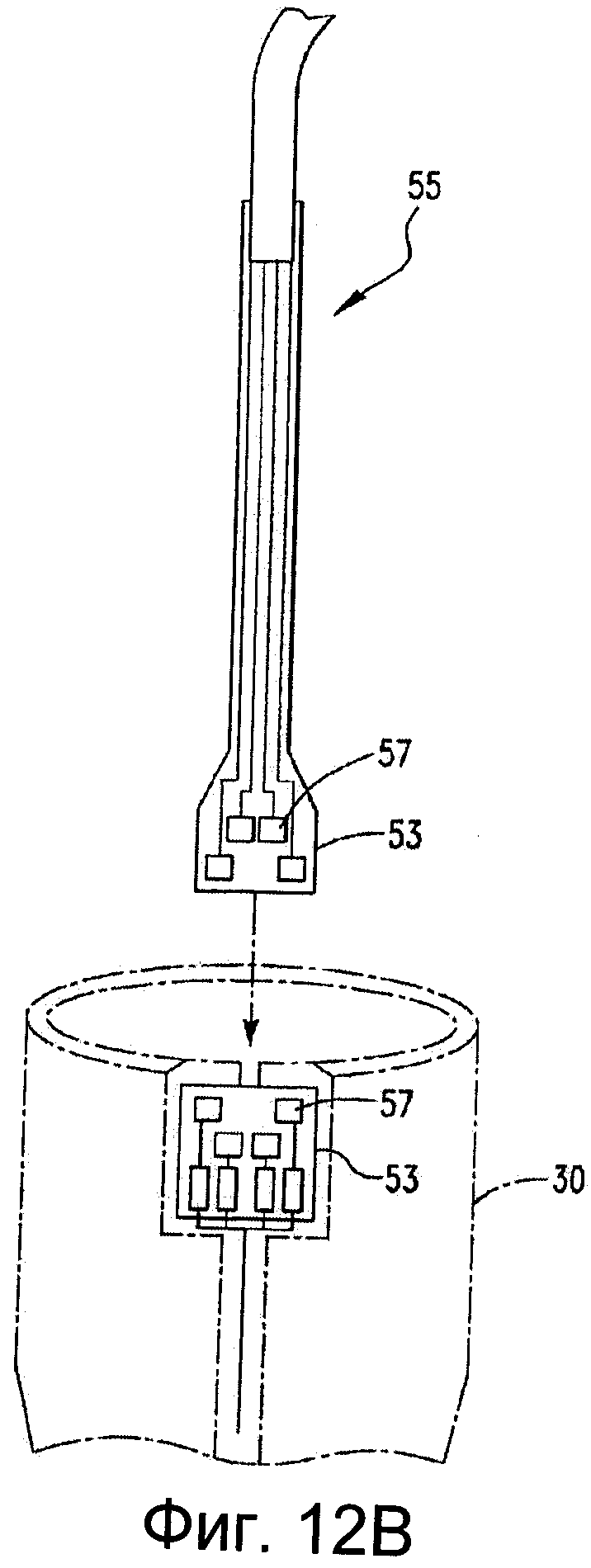
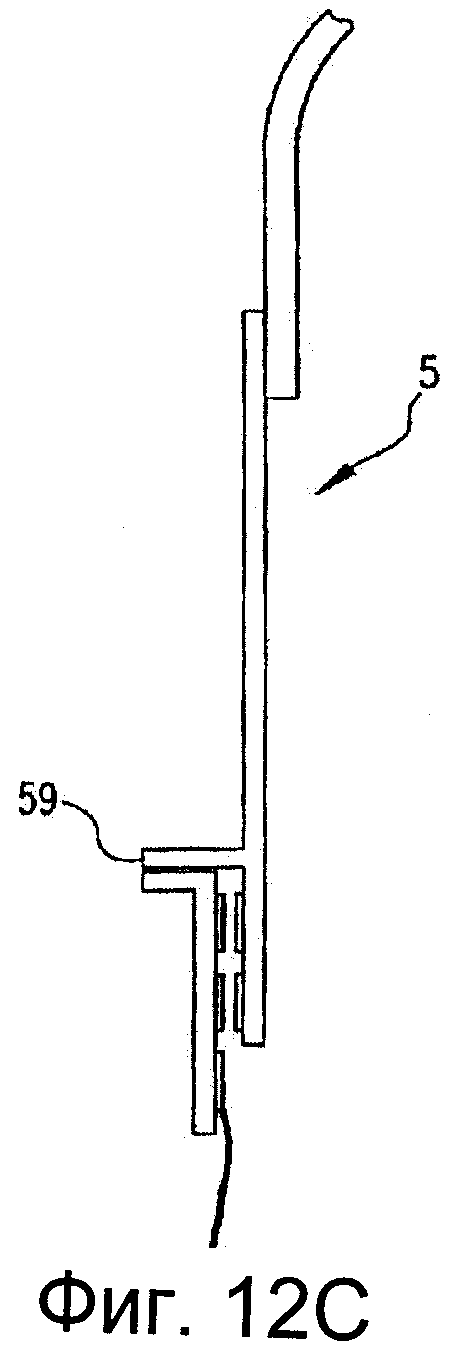
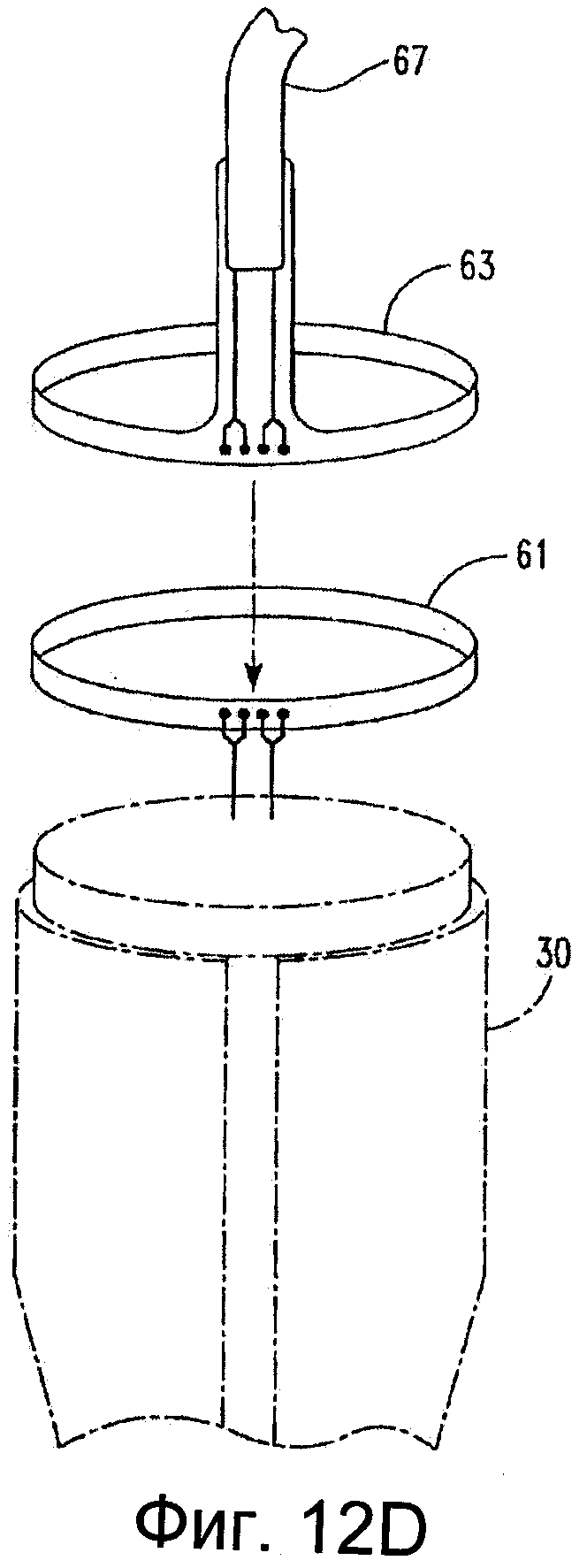


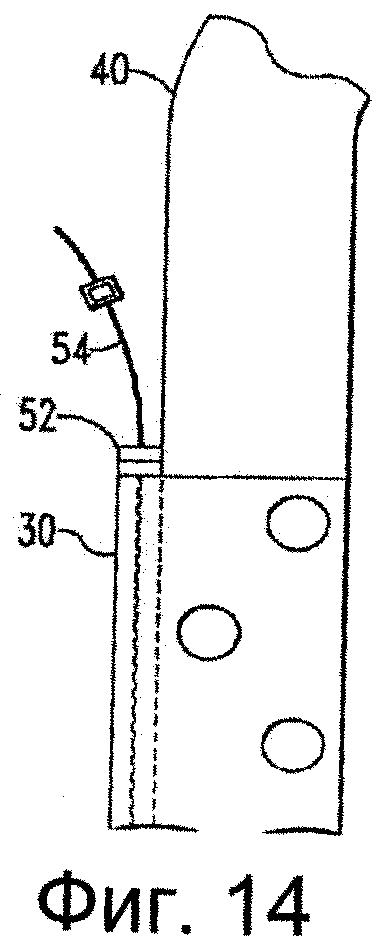
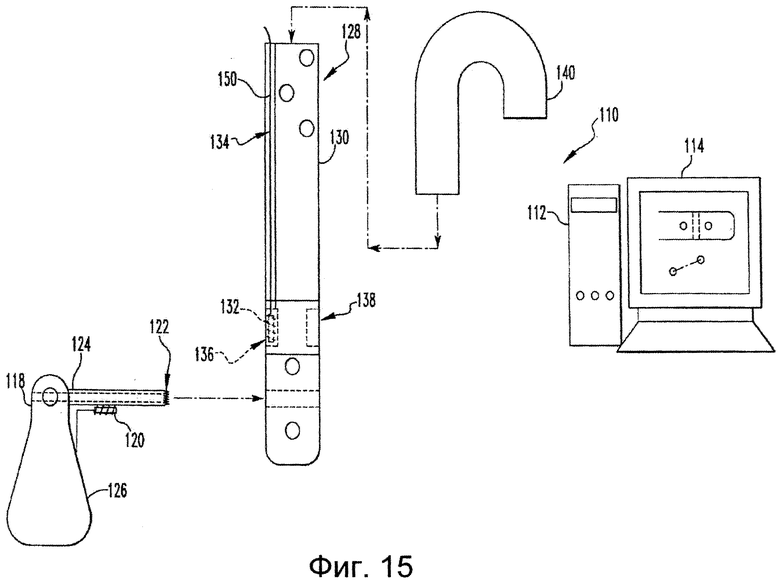


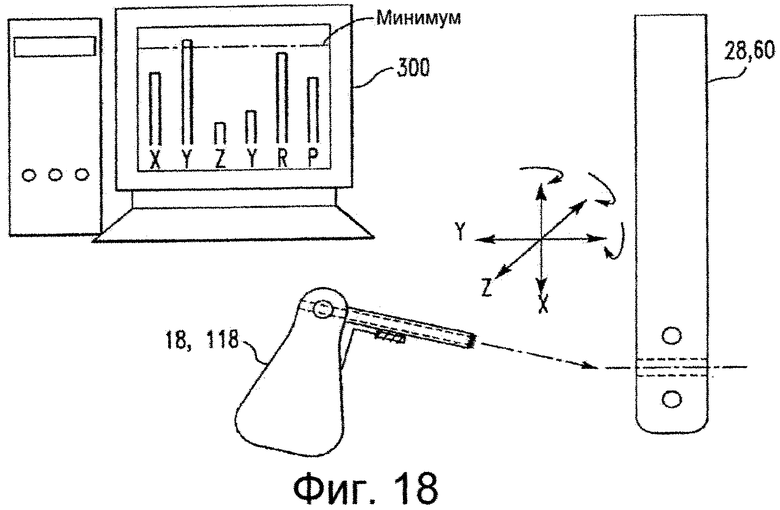
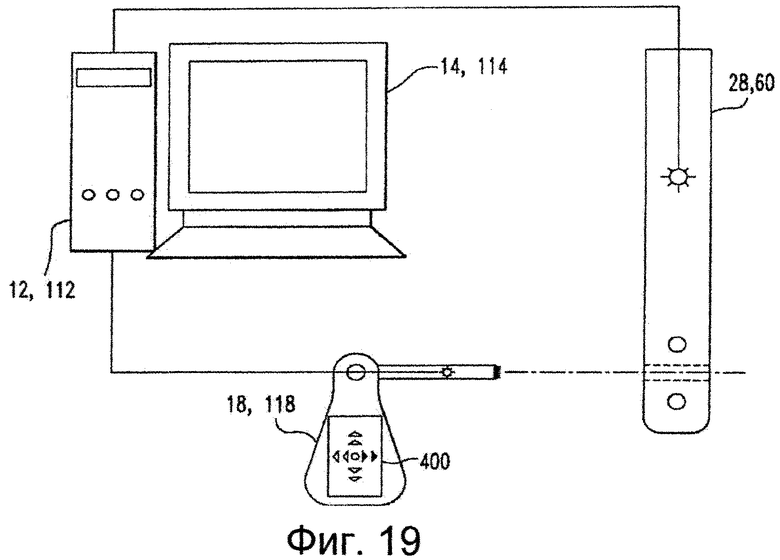
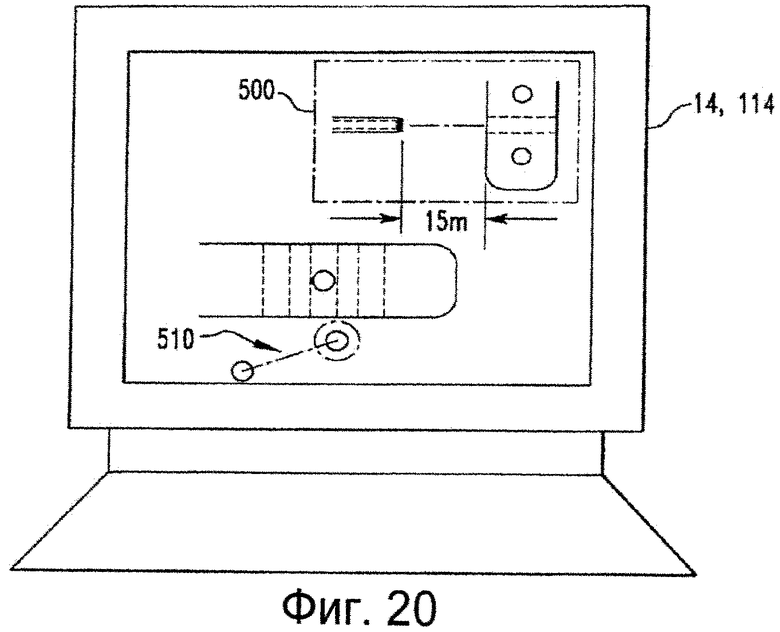
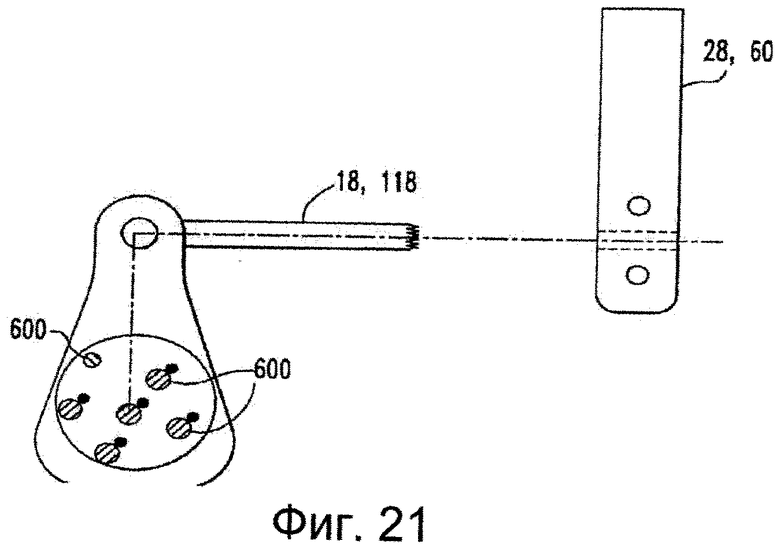

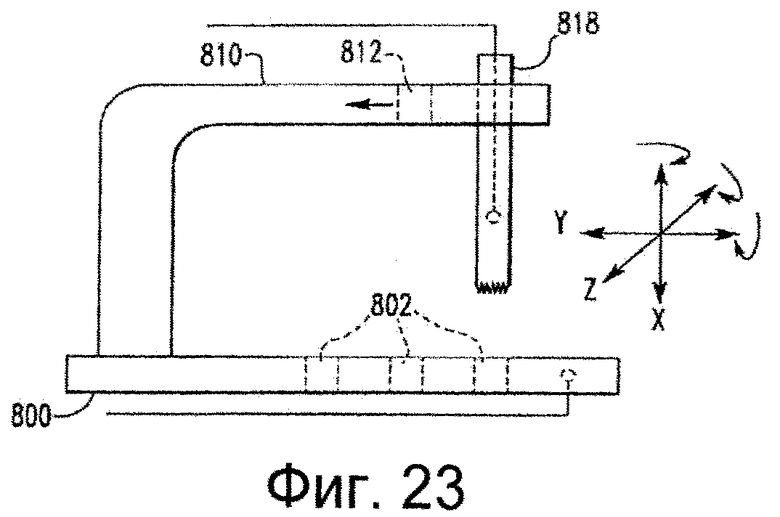

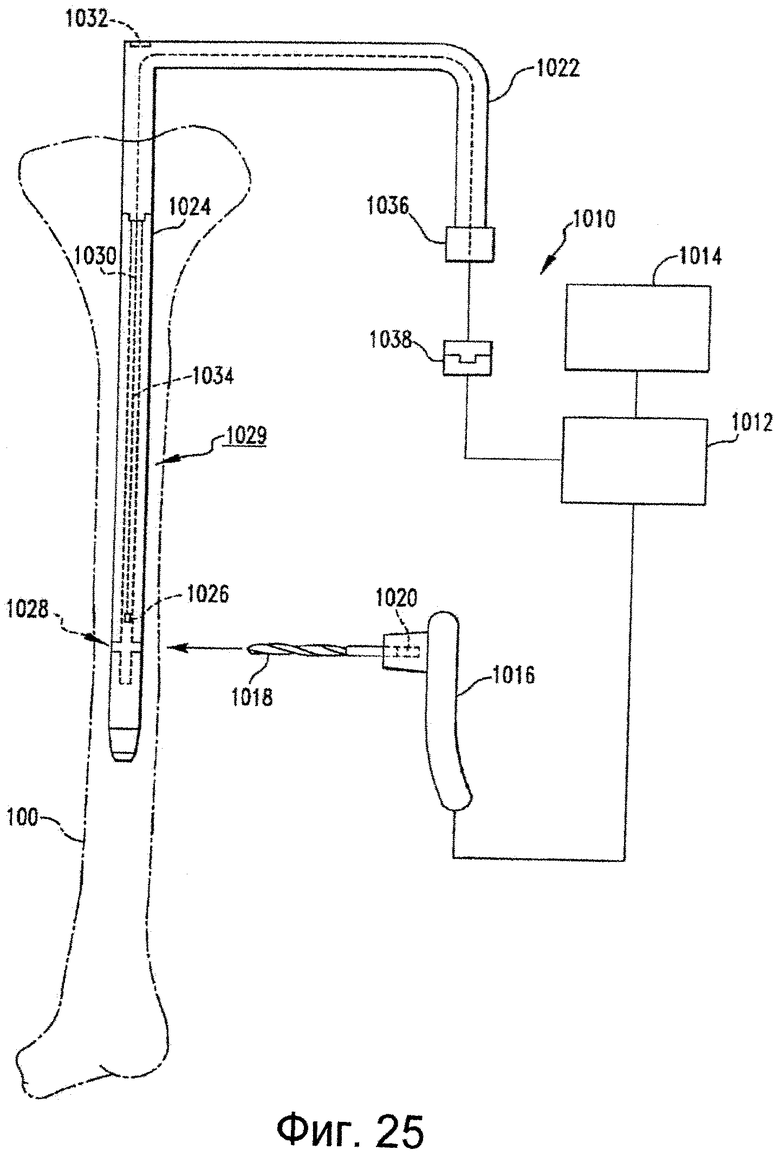
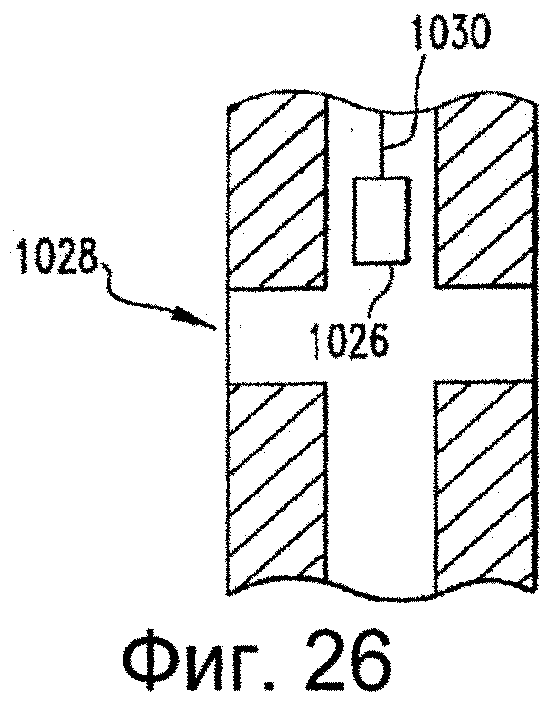
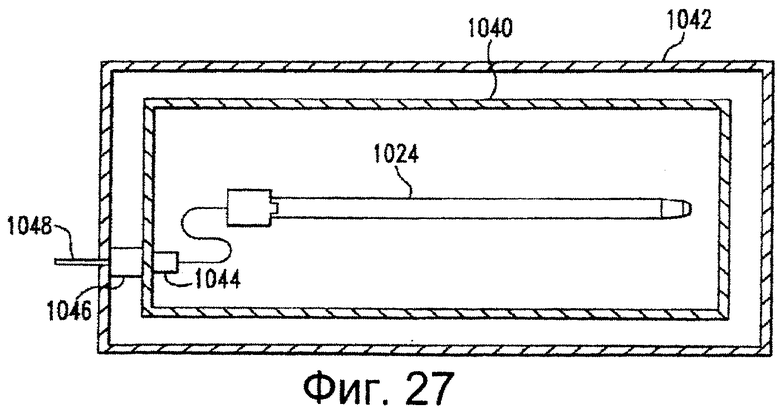


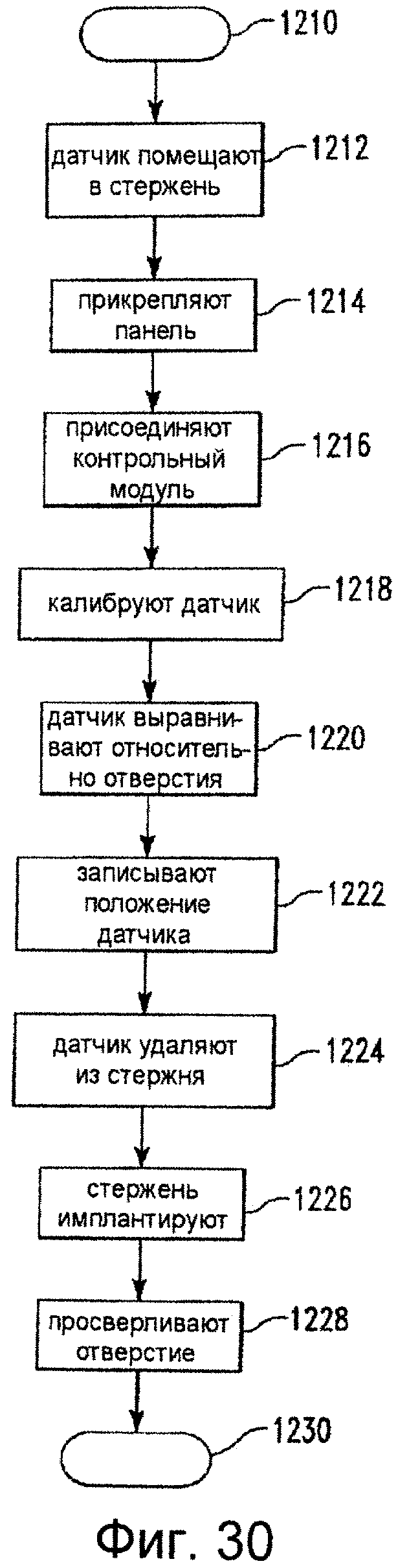


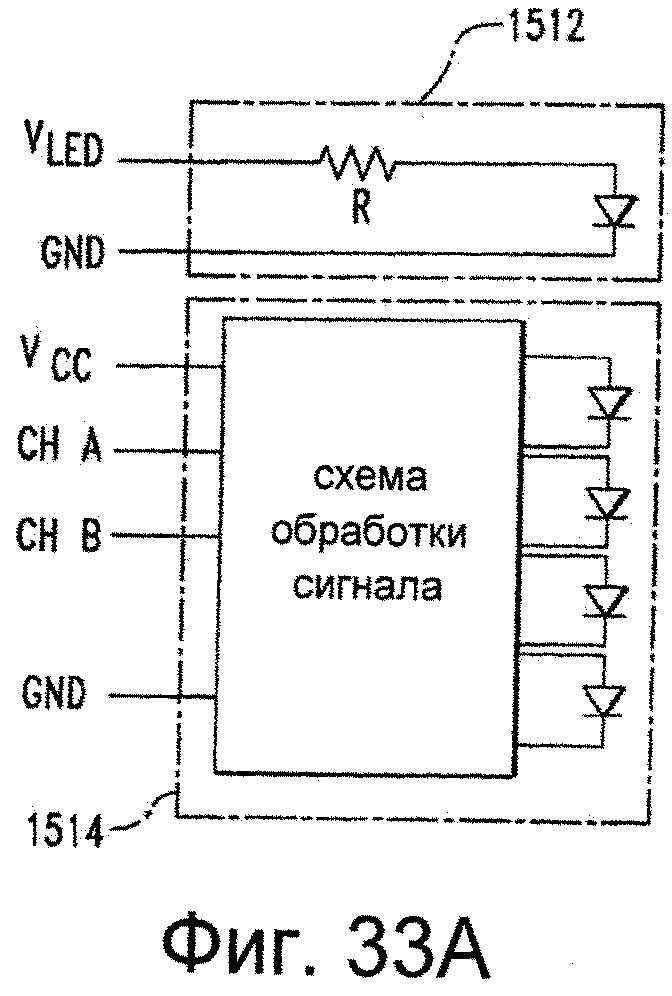

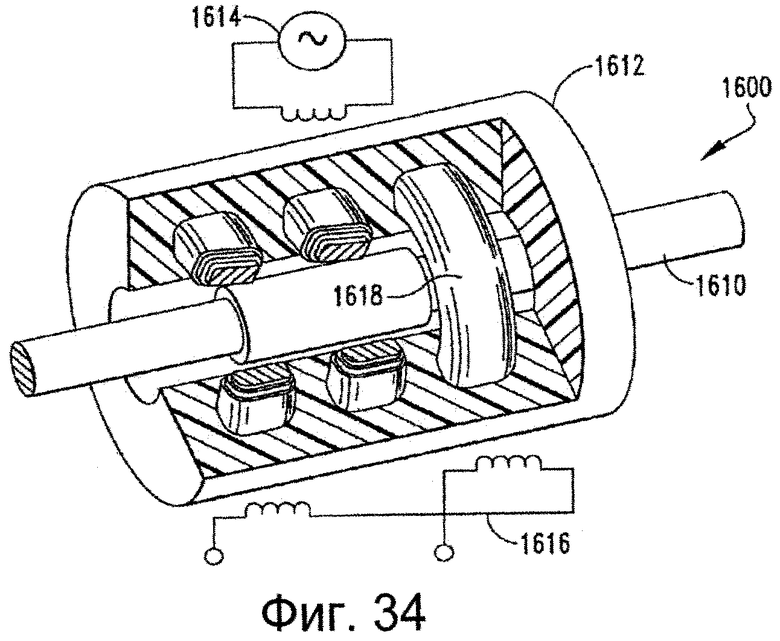
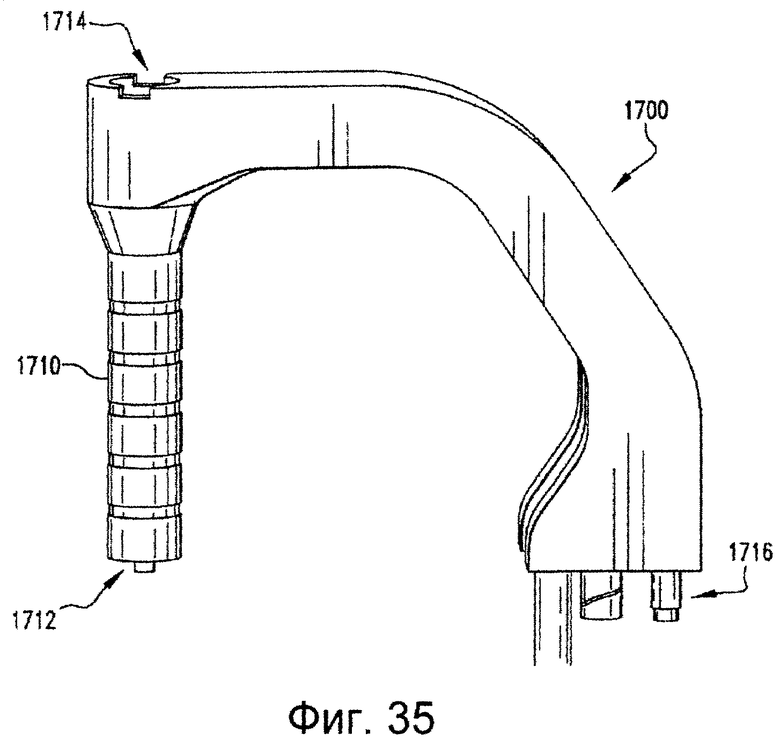


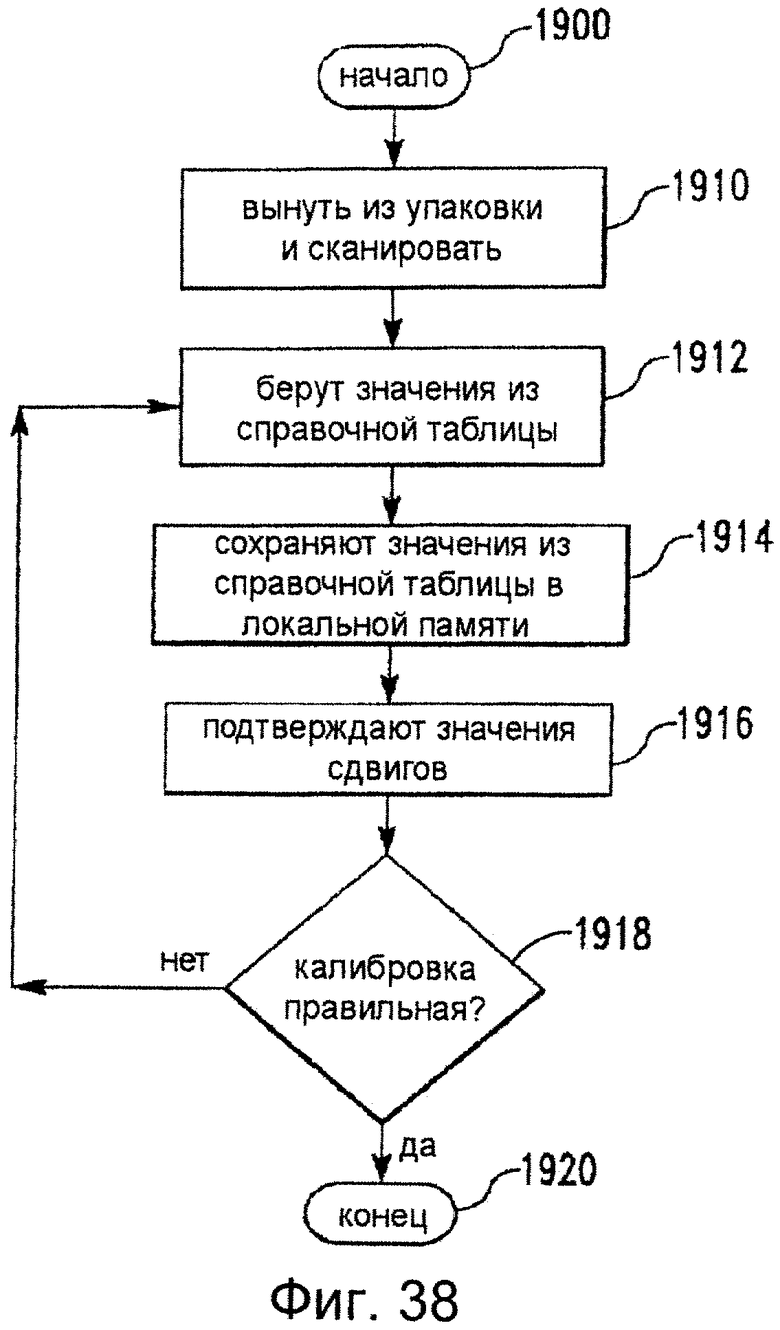
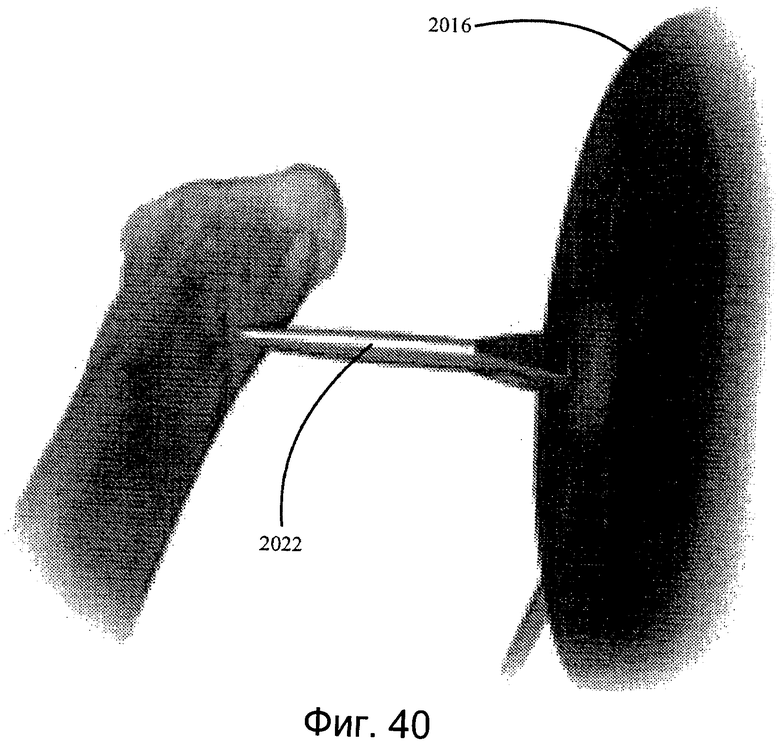



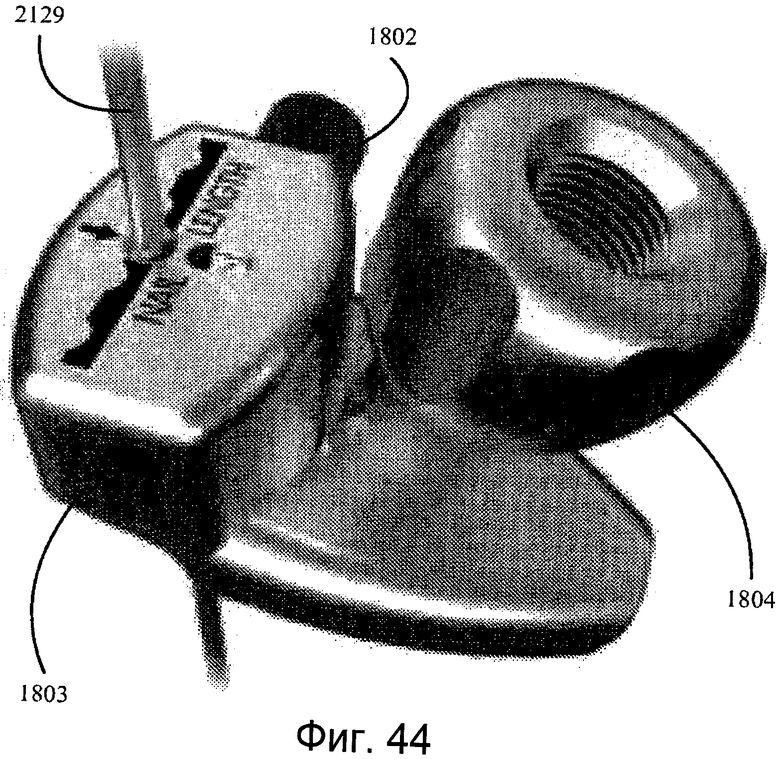



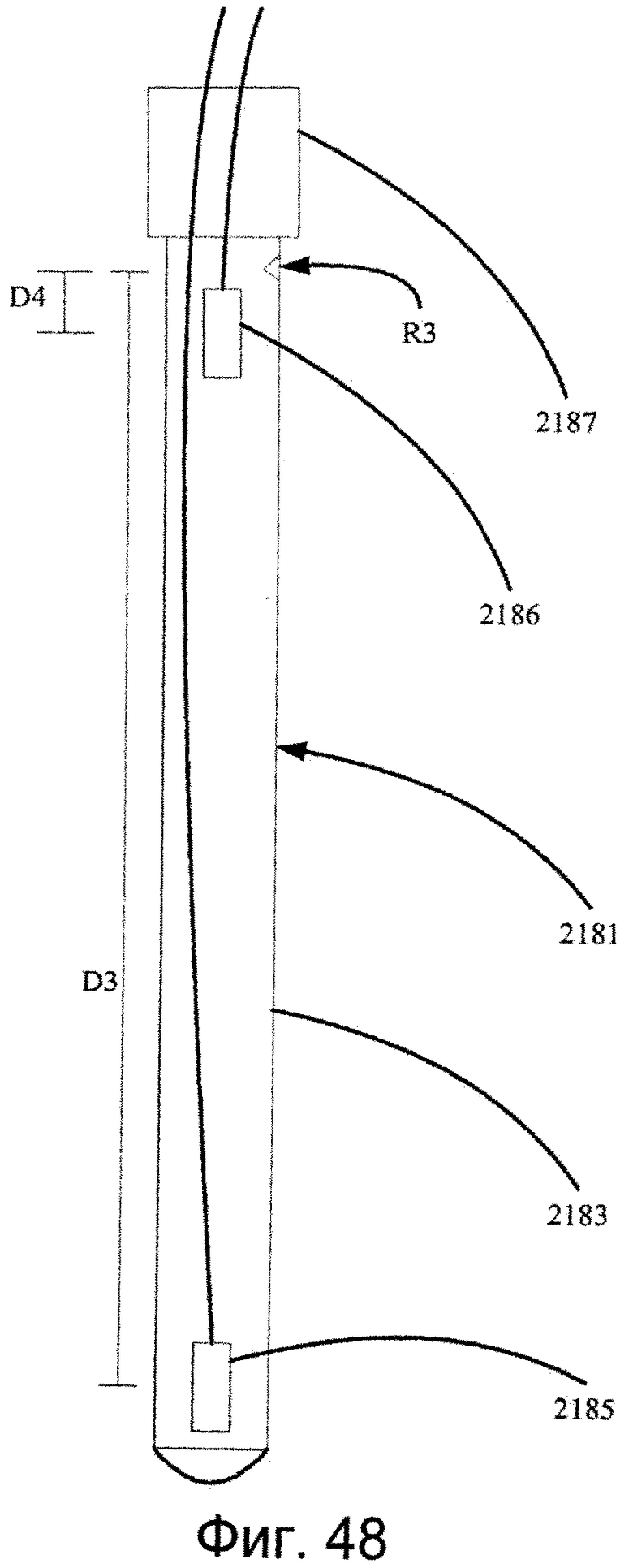




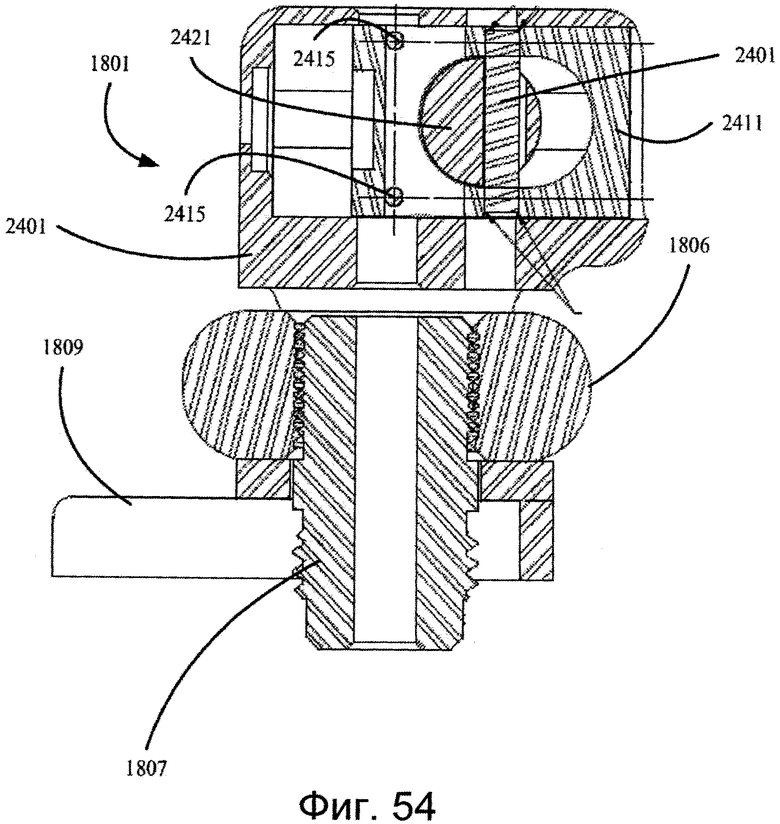
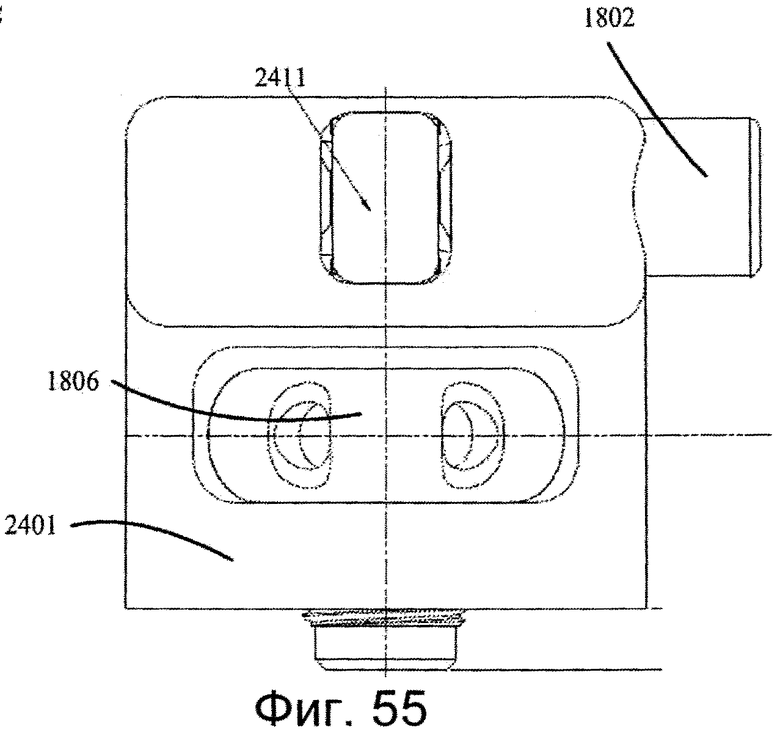
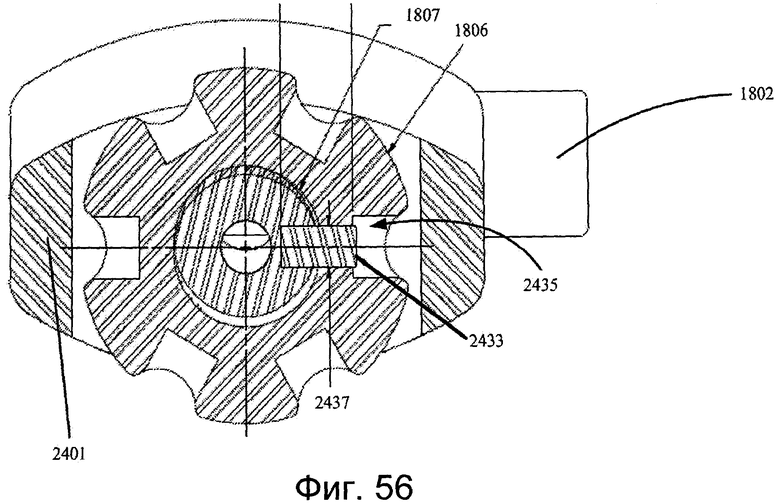
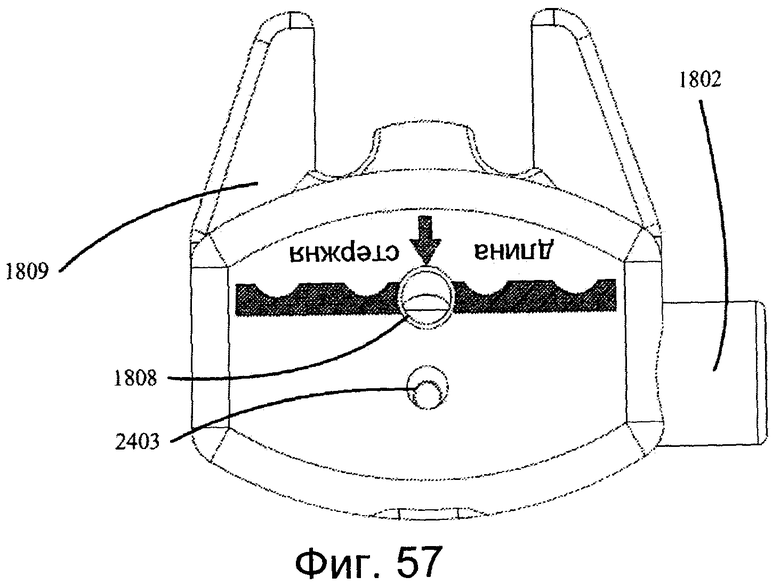





Изобретение относится к медицине. Система для определения местоположения рельефного ориентира на ортопедическом имплантате содержит устройство, выполненное с возможностью обработки в автоклаве. Упомянутое устройство содержит корпус, генератор поля для генерации электромагнитного поля, первый электромагнитный датчик для размещения на заданном расстоянии от рельефного ориентира и элемент, соединенный с корпусом с возможностью отсоединения. Корпус выполнен с возможностью обработки в автоклаве. Упомянутый генератор поля содержит множество элементов, генерирующих магнитное поле и расположенных внутри корпуса. Упомянутое устройство выполнено с возможностью функционирования после стерилизации в автоклаве. Первый электромагнитный датчик для размещения на заданном расстоянии от рельефного ориентира генерирует показания датчика в ответ на генерируемое электромагнитное поле. Упомянутый элемент определяет продольную ось, представляющую одну ось генерируемого электромагнитного поля. Система выполнена с возможностью использования одной оси генерируемого электромагнитного поля для определения положения элемента относительно рельефного ориентира. Изобретение обеспечивает возможность легкой стерилизации или обработки в автоклаве для повторного использования. 14 з.п. ф-лы, 62 ил.
1. Система для определения местоположения рельефного ориентира на ортопедическом имплантате, содержащая:
устройство, выполненное с возможностью обработки в автоклаве, содержащее:
корпус, выполненный с возможностью обработки в автоклаве; и
генератор поля для генерации электромагнитного поля, при этом генератор поля содержит множество элементов, генерирующих магнитное поле и расположенных внутри корпуса;
при этом устройство, выполненное с возможностью обработки в автоклаве, выполнено с возможностью функционирования после стерилизации в автоклаве;
первый электромагнитный датчик для размещения на заданном расстоянии от рельефного ориентира, генерирующий показания датчика в ответ на генерируемое электромагнитное поле; и
элемент, соединенный с корпусом с возможностью отсоединения, причем элемент определяет продольную ось, представляющую одну ось генерируемого электромагнитного поля, причем система выполнена с возможностью использования одной оси генерируемого электромагнитного поля для определения положения элемента относительно рельефного ориентира.
2. Система по п. 1, дополнительно содержащая по меньшей мере один из следующих элементов:
первый зонд, имеющий проксимальный участок и дистальный участок, причем на дистальном участке зонда расположен первый электромагнитный датчик; или
зонд, выполненный с возможностью втягивания, содержащий первый электромагнитный датчик; или
зонд, выполненный с возможностью втягивания, содержащий первый электромагнитный датчик и корпус, содержащий, по меньшей мере, участок зонда, выполненного с возможностью втягивания.
3. Система по п. 2, дополнительно содержащая второй электромагнитный датчик, расположенный на проксимальном участке первого зонда.
4. Система по п. 2, дополнительно содержащая второй зонд, имеющий проксимальный и дистальный участок, и третий электромагнитный датчик, расположенный на дистальном конце второго зонда, причем второй зонд длиннее первого зонда.
5. Система по любому из пп. 1-4, дополнительно содержащая процессор для сравнения показаний, поступающих от первого электромагнитного датчика и указанного элемента, и использующий указанное заданное расстояние для вычисления положения элемента относительно рельефного ориентира.
6. Система по любому из пп. 2-4, дополнительно содержащая регулируемый стопор, выполненный с возможностью соединения с ортопедическим имплантатом, причем регулируемый стопор содержит прорезь, через которую проходит первый или второй зонд, и содержит зажимное приспособление для удержания первого или второго зонда в фиксированном положении.
7. Система по п. 6, в которой первый или второй зонд содержит несколько разнесенных между собой меток так, что зажимное приспособление может быть выборочно установлено для удержания первого или второго зонда в фиксированном положении около метки или между метками.
8. Система по любому из пп. 1-4, 7, дополнительно содержащая ручку, соединенную с ортопедическим имплантатом с возможностью отсоединения.
9. Система по любому из пп. 1-4, 7, в которой корпус, выполненный с возможностью обработки в автоклаве, имеет форму диска.
10. Система по любому из пп. 1-4, 7, в которой указанный элемент содержит одну из следующих деталей: направляющую сверла, обойму сверла, сверло, носик сверла, зажимной патрон сверла или фиксирующий элемент.
11. Система по любому из пп. 1-4, 7, в которой ортопедический имплантат содержит один из следующих элементов: интрамедуллярный стержень, костную пластину, бедренный протез, коленный протез или плечевой протез.
12. Система по любому из пп. 2-4, 7, в которой первый или второй зонд смотан в катушку до его размещения в ортопедическом имплантате.
13. Система по п. 1, в которой первый электромагнитный датчик имеет проксимальный и дистальный конец, причем дистальный конец первого электромагнитного датчика соединен с проксимальным концом ортопедического имплантата так, что первый электромагнитный датчик находится на определенном расстоянии от по меньшей мере одного рельефного ориентира, расположенного в проксимальной области ортопедического имплантата.
14. Система по любому из пп. 1-4, 7, 13, в которой по меньшей мере корпус и указанный элемент выполнены с возможностью повторного использования.
15. Система по любому из пп. 1-4, 7, 13, в которой корпус выполнен из одного из следующих материалов: керамики, силикона, полипропилена (ПП), поликарбоната (ПК), полиметилпентена (ПМП), ПТФЭ смолы или полиметилметакрилата (ПММА или акрилового полимера).
| US2004034355 A1, 19.02.2004 | |||
| ПРИЦЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ОСТЕОСИНТЕЗА КРЕСТЦОВО-ПОДВЗДОШНОГО СОЧЛЕНЕНИЯ | 2006 |
|
RU2309696C1 |
| УСТРОЙСТВО ДЛЯ ИНТРАМЕДУЛЛЯРНОГО ОСТЕОСИНТЕЗА БОЛЬШЕБЕРЦОВОЙ КОСТИ С БЛОКИРОВАНИЕМ ВИНТАМИ | 2003 |
|
RU2262320C2 |
| US2007162018 A1, 12.07.2007 | |||
| US2003135211 A1, 17.07.2003 | |||
| US2008221628 A1, 11.09.2008 | |||
| US2005080427 A1, 14.04.2005 | |||

