Изобретение относится к средствам контроля железнодорожного пути и может быть использовано в системе распределенного контроля железнодорожного пути, используемого при смешанном скоростном пассажирском и грузовом движении поездов.
Известна система для контроля железнодорожного пути (в частности, для диагностики и мониторинга состояния стрелки, пересечения, стрелочного перевода и рельсового стыка рельсового пути), содержащее датчики ускорения, расположенные на конструктивном элементе рельсового транспортного средства, и расположенные на рельсовом транспортном средстве скоростемер, навигационное устройство и устройство сбора данных, предназначенное для обработки, записи и оценки измерительных сигналов датчиков ускорения, скоростемера и навигационного устройства и обеспечения прогнозирования необходимого срока ремонтных работ и соответствующих затрат на ремонтные работы (RU 2349480, В61К 9/08, 27.10.08).
Недостаток известной системы заключается в относительно невысокой достоверности контроля, обусловленной размещением измерительных датчиков только на подвижном объекте.
В качестве прототипа принята система распределенного контроля рельсового полотна, содержащая датчики вибрации и размещенное в головной части подвижного объекта устройство сбора данных, состоящее из микроконтроллера, к которому подключены передатчик, приемник и блок вывода информации, а в хвостовой части подвижного объекта размещен приемопередающий модуль, передатчик которого соединен по внутреннему каналу связи с приемником устройства сбора данных, входы питания приемника и передатчика приемопередающего модуля соединены с источником питания, состоящим из преобразователя энергии, соединенного с накопителем энергии, выход которого является выходом источника питания, на контролируемом участке железнодорожного пути размещен измерительный модуль, состоящий из приемника, выход которого соединен с накопителем энергии, передатчика, вход которого соединен с выходом микроконтроллера, к входам которого через блок сопряжения подключены датчики вибрации, закрепленные на рельсах или шпалах контролируемого участка, и датчики температуры, закрепленные на рельсах контролируемого участка, при этом выход накопителя энергии соединен с входами питания микроконтроллера и передатчика (RU2425770, В61К 9/08, 10.08.2011).
Известная система по объему и достоверности контроля параметров взаимодействия поездов с путевой инфраструктурой не достаточно информативна, что не позволяет использовать ее при организации и управлении смешанным движением высокоскоростных пассажирских и грузовых поездов на основе современного комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта типа УРРАН, RAMS или аналогичных.
Технический результат изобретения заключается в расширении функциональных возможностей.
Технический результат достигается тем, что в системе распределенного контроля железнодорожного пути для высокоскоростного движения, содержащей размещенное в головной части подвижного объекта устройство сбора данных, состоящее из микроконтроллера, с подключенными к нему приемопередатчиком и блоком вывода информации, а в хвостовом вагоне подвижного объекта размещен приемопередающий модуль, подключенный к автономному источнику электропитания и соединенный по локальному каналу радиосвязи с приемопередатчиком в головной части подвижного объекта, на контролируемом участке железнодорожного пути размещен измерительный модуль, состоящий из приемопередающего устройства, подключенного к накопителю электроэнергии, соединенного с выходом путевого автономного источника электропитания, микроконтроллера, с подключенным к нему модулем памяти, первый порт микроконтроллера соединен с портом приемопередающего устройства, ко второму порту микроконтроллера через блок сопряжения подключены датчики механических воздействий на конструктивные элементы железнодорожного пути, закрепленные на рельсах и/или шпалах контролируемого участка железнодорожного пути, и датчики температуры, закрепленные на рельсах контролируемого участка железнодорожного пути, согласно изобретению в хвостовом и/или головном вагонах подвижного объекта установлен микроконтроллер с подключенными к нему модулем памяти, в котором записана карта путевой инфраструктуры, приемником спутниковой навигации и блоком сопряжения, к входам которого подключен блок измерения и расчета геометрических параметров рельсового пути, при этом ходовая часть хвостового и/или головного вагонов снабжена подключенными к соответствующим входам блока сопряжения датчиками механических воздействий на конструктивные элементы ходовой части этого вагона, при этом порт приемопередающего модуля соединен с портом микроконтроллера, а приемопередатчик устройства сбора данных по каналу дальней радиосвязи соединен с центром диспетчерского управления, который посредством корпоративной системы связи подключен к автоматизированной системе комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта.
На чертеже приведена схема предлагаемой системы распределенного контроля железнодорожного пути для высокоскоростного движения.
Система распределенного контроля железнодорожного пути для высокоскоростного движения содержит размещенное в головной части подвижного объекта устройство 1 сбора данных, состоящее из микроконтроллера 2, с подключенными к нему приемопередатчиком 3 и блоком 4 вывода информации, в хвостовом вагоне 5 и/или головном вагоне подвижного объекта размещен приемопередающий модуль 6, подключенный к автономному источнику 7 электропитания и соединенный по локальному каналу радиосвязи с приемопередатчиком 3 в головной части подвижного объекта, в хвостовом вагоне 5 и/или головном вагоне подвижного объекта установлен микроконтроллер 8 с подключенными к нему модулем 9 памяти, в котором записана карта путевой инфраструктуры, приемником 10 спутниковой навигации и блоком 11 сопряжения, к входам которого подключен блок 12 измерения и расчета геометрических параметров рельсового пути, при этом ходовая часть хвостового вагона 5 и/или головного вагона снабжена подключенными к соответствующим входам блока 11 сопряжения датчиками 13 механических воздействий на конструктивные элементы ходовой части этого вагона, при этом порт приемопередающего модуля 6 соединен с портом микроконтроллера 8 (для упрощения чертежа вышеперечисленная аппаратура, размещенная в хвостовом вагоне, для головного вагона на чертеже не показана), приемопередатчик 3 устройства 1 сбора данных по каналу дальней радиосвязи соединен с центром 14 диспетчерского управления, который посредством корпоративной системы связи подключен к автоматизированной системе 15 комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта, на контролируемом участке железнодорожного пути размещен измерительный модуль 16, состоящий из приемопередающего устройства 17, подключенного к накопителю 18 электроэнергии, соединенного с выходом путевого автономного источника 19 электропитания, порт приемопередающего устройства 17 соединен с первым портом микроконтроллера 20, к которому подключен модуль 21 памяти, ко второму порту микроконтроллера 20 через блок 22 сопряжения подключены датчики 23 механических воздействий на конструктивные элементы железнодорожного пути, закрепленные на рельсах и/или шпалах контролируемого участка железнодорожного пути, и датчики 24 температуры, закрепленные на рельсах контролируемого участка железнодорожного пути.
Система распределенного контроля железнодорожного пути для высокоскоростного движения работает следующим образом.
При прохождении поездом контролируемого участка железнодорожного пути, приемопередатчик 3 устройства 1 сбора данных, размещенного в головной части поезда, излучает сигнал, который поступает на вход приемопередающего устройства 17 измерительного модуля 16. Измерительный модуль 16 использует электроэнергию, запасенную в накопителе 18 электроэнергии, с которого электропитание поступает на микроконтроллер 20, приемопередающее устройство 17 и блок 22 сопряжения, на который поступают сигналы с датчиков 23 механических воздействий на конструктивные элементы железнодорожного пути (датчики вибраций, акселерометры, динамометры и т.д.), закрепленных на рельсах или шпалах контролируемого участка железнодорожного пути, и с датчиков 24 температуры, закрепленных на рельсах контролируемого участка железнодорожного пути. Накопитель 18 электроэнергии запасает и хранит электроэнергию, которую вырабатывает путевой автономный источник 19 электропитания. В качестве этого источника может быть, например, преобразователь механической энергии деформации рельсового пути под тяжестью поезда в электрическую энергию или преобразователь вибрации рельсов в электроэнергию с помощью пьезоэлектрических элементов. Измерительный модуль 16 может быть использован для контроля на любом выбранном участке железнодорожного пути, в том числе там, где нет возможности подключения к сетевому источнику напряжения или нет возможности обеспечить требуемую периодичность обслуживания для замены разрядившегося накопителя 18 электроэнергии (например, аккумуляторной батареи). В процессе прохождения поезда мимо измерительного модуля 16, в модуле 21 памяти, соединенном с микроконтроллером 20, накапливаются данные о сигналах, принимаемых с датчиков 23 и 24. Датчики 23 механических воздействий на конструктивные элементы железнодорожного пути крепят на рельсах или шпалах, а датчики 24 температуры крепят на рельсах. Расположение датчиков на контролируемом участке пути и крепление их непосредственно на объектах контроля позволяет с более высокой точностью производить измерения контролируемых параметров и, следовательно, повысить достоверность контроля рельсового полотна и дать более объективную оценку состояния контролируемого рельсового полотна. С помощью приемопередающего устройства 17, обработанная микроконтроллером 20 информация о нагрузках и прочности элементов путевой инфраструктуры передается по локальному радиоканалу связи на приемопередающий модуль 6, установленный в хвостовом вагоне удаляющегося поезда. Питание электронных схем и приемопередающего модуля 6 осуществляется от автономного источника электропитания 7, который может быть выполнен, например, на основе электромашинного генератора с приводом от колес вагона. Из приемопередающего модуля 6 информация поступает в микроконтроллер 8, который также непрерывно получает и обрабатывает информацию от датчиков 13 механических воздействий на конструктивные элементы ходовой части вагона (тензометрических колесных пар и автосцепок, а также датчиков вибраций и акселерометров) и от блока 12 измерения и расчета геометрических параметров рельсового пути (радиусов кривых, положения рельсовых нитей в плане и профиле, ширины колеи). Также микроконтроллер 8 получает данные о текущих координатах места положения хвоста поезда от приемника 10 спутниковой навигации (ГЛОНАСС/GPS) для привязки данных измерений реального времени к электронной GPS карте путевой инфраструктуры, записанной в модуле 9 памяти. Данные измерений и расчетов накапливаются в модуле 9 памяти, подключенном к микроконтроллеру 8 и периодически накопленная им информация передается приемопередающим модулем 6 по локальному радиоканалу связи в приемопередатчик 3 устройства 1 сбора данных. После этого информация из модуля 9 памяти удаляется для приема новых данных.
Полученная по локальному радиоканалу связи информация передается с выхода приемопередатчика 3 на вход микроконтроллера 2, который производит окончательную обработку информации с учетом всех измеренных параметров, и преобразует ее в вид, удобный для ее отображения машинисту поезда посредством блока 4 вывода информации и в вид, удобный для ее дальнейшей передачи по радиоканалу дальней радиосвязи в центр 14 диспетчерского управления. Из центра 14 диспетчерского управления через корпоративную систему связи, информация поступает в автоматизированную систему 15 комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта (АС УРРАН).
Система 15 АС УРРАН производит анализ надежности работы технических средств инфраструктуры и подвижного состава и использует его результаты для снижения рисков потерь от износа и повреждений. Система 15 АС УРРАН использует также исторические данные о превышениях допустимых нагрузок и об отказах элементов участка пути для высокоскоростного движения и элементов ходовой части грузовых вагонов, перемещавшихся по этим участкам пути, для выработки рекомендаций (для автоматизированной системы оперативного управления перевозками АСОУП или аналогичной) по формированию составов высокоскоростных грузовых поездов из вагонов, обеспечивающих минимальную интенсивность взаимного износа и повреждения составов высокоскоростных грузовых поездов и путевой инфраструктуры высокоскоростного пассажирского движения. В частности, по результатам анализа реакции на путь высокоскоростного пассажирского поезда и возможной реакции на путь грузовых вагонов поезда в зависимости от его скорости, центр 14 диспетчерского управления выдает разрешение на движение грузового поезда на данном участке пути с ограниченной скоростью, которая обеспечит минимальную интенсивность взаимного износа и повреждения составов высокоскоростных грузовых поездов и путевой инфраструктуры высокоскоростного движения.
На многопутных железнодорожных участках определения предельных скоростей и ускорений (замедлений) система производит в местах возможного совпадения одновременного встречного движения по соседним путям скоростного пассажирского и грузового поезда и в интервалах времени, когда рельсовые нити этих секций подвергаются максимальным температурным напряжениям.
Поскольку система 15 АС УРРАН связана с системами разработки и ведения графиков движения поездов типа ГИД Урал, Эльбрус и аналогичными, выработанные ограничения скорости и ускорения (замедления) оперативно учитываются при корректировке графиков и режимов движения поездов, а повреждения и износ элементов ходовых частей вагонов и элементов инфраструктуры оперативно учитываются при проведении соответствующих работ по техническому содержанию путевой инфраструктуры и вагонного и локомотивного парков.
Вагон, в котором размещен приемопередающий модуль 6, по загрузке и по конструкции приспосабливают к имитации максимального механического взаимодействия вагона состава данного поезда на элементы путевой инфраструктуры для получения данных в реальном времени по нагрузкам и прочности элементов путевой инфраструктуры и для последующей более точной выработки системой 15 АС УРРАН локальных ограничений скорости и ускорений (замедлений) движения поезда.
Для измерения параметров взаимодействия состава с путевой инфраструктурой возможно использование несколько вагонов, оборудованных аналогично хвостовому вагону. Эти вагоны размещают в месте максимального влияния состава поезда на элементы путевой инфраструктуры.
Дополнительно на локомотивах электровозов и в критических по механической прочности местах на контактной сети электрифицированных железных дорог, могут быть размещены датчики измерения параметров, характеризующих надежность энергоснабжения контактной сетью двигательных установок локомотивов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2452644C2 |
| Система контроля целостности состава | 2015 |
|
RU2614158C1 |
| СИСТЕМА РАСПРЕДЕЛЕННОГО КОНТРОЛЯ РЕЛЬСОВОГО ПОЛОТНА | 2010 |
|
RU2425770C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| Система обмена данными локомотивных систем с диспетчерским центром контроля и управления | 2018 |
|
RU2678915C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2519323C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2014 |
|
RU2550795C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |

Изобретение относится к средствам контроля железнодорожного пути. Система включает размещенное в головной части подвижного объекта устройство сбора данных, состоящее из микроконтроллера, с приемопередатчиком и блоком вывода информации. В хвостовом вагоне и головном вагоне размещен приемопередающий модуль, автономный источник электропитания, микроконтроллер, модуль памяти, в котором записана карта путевой инфраструктуры, приемник спутниковой навигации, блок сопряжения, блок измерения и расчета геометрических параметров пути, при этом вагон снабжен датчиками механических воздействий на ходовую часть. На контролируемом участке пути размещен измерительный модуль, включающий приемопередающее устройство, накопитель электроэнергии, соединенный с путевым автономным источником питания, модуль памяти, микроконтроллер с подключенными через блок сопряжения датчиками механических воздействий на конструктивные элементы пути и датчиками температуры, закрепленными на рельсах. Система задействует центр диспетчерского управления и автоматизированную систему комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта. Достигается расширение функциональных возможностей. 1 ил.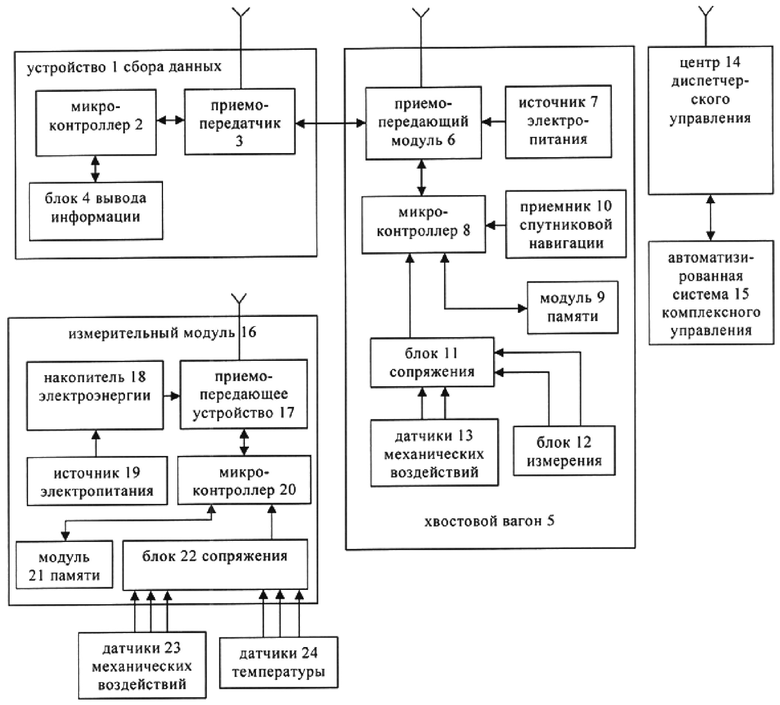
Система распределенного контроля железнодорожного пути для высокоскоростного движения, содержащая размещенное в головной части подвижного объекта устройство сбора данных, состоящее из микроконтроллера, с подключенными к нему приемопередатчиком и блоком вывода информации, а в хвостовом вагоне подвижного объекта размещен приемопередающий модуль, подключенный к автономному источнику электропитания и соединенный по локальному каналу радиосвязи с приемопередатчиком в головной части подвижного объекта, на контролируемом участке железнодорожного пути размещен измерительный модуль, состоящий из приемопередающего устройства, подключенного к накопителю электроэнергии, соединенного с выходом путевого автономного источника электропитания, микроконтроллера, с подключенным к нему модулем памяти, первый порт микроконтроллера соединен с портом приемопередающего устройства, ко второму порту микроконтроллера через блок сопряжения подключены датчики механических воздействий на конструктивные элементы железнодорожного пути, закрепленные на рельсах и/или шпалах контролируемого участка железнодорожного пути, и датчики температуры, закрепленные на рельсах контролируемого участка железнодорожного пути, отличающаяся тем, что в хвостовом и/или головном вагонах подвижного объекта установлен микроконтроллер с подключенными к нему модулем памяти, в котором записана карта путевой инфраструктуры, приемником спутниковой навигации и блоком сопряжения, к входам которого подключен блок измерения и расчета геометрических параметров рельсового пути, при этом ходовая часть хвостового и/или головного вагонов снабжена подключенными к соответствующим входам блока сопряжения датчиками механических воздействий на конструктивные элементы ходовой части этого вагона, при этом порт приемопередающего модуля соединен с портом микроконтроллера, а приемопередатчик устройства сбора данных по каналу дальней радиосвязи соединен с центром диспетчерского управления, который посредством корпоративной системы связи подключен к автоматизированной системе комплексного управления ресурсами, рисками и надежностью объектов железнодорожного транспорта.
| СИСТЕМА РАСПРЕДЕЛЕННОГО КОНТРОЛЯ РЕЛЬСОВОГО ПОЛОТНА | 2010 |
|
RU2425770C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| "Автоматизация инспектирования пути", журнал "Железные дороги мира", N7, 2006 г | |||
| стр | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| EA 28265 B1, 31.10.2017. | |||

