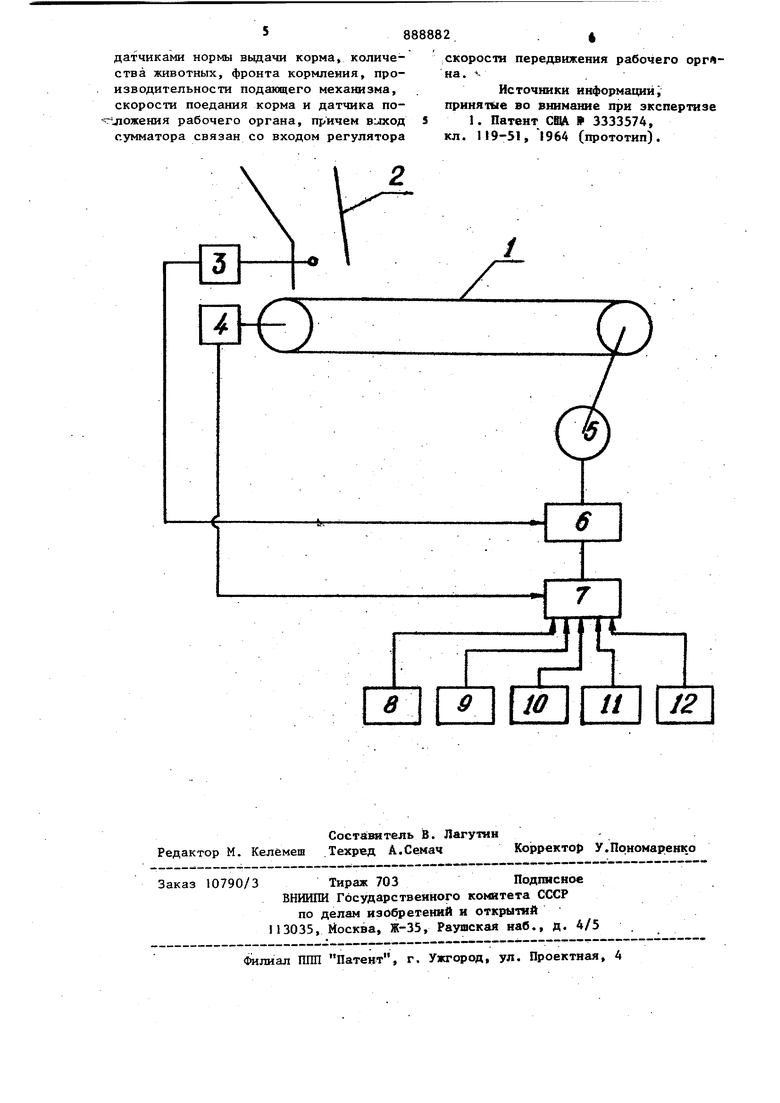
Изобретение относится к животноводству, в частности к способам и устройствам для раздачи кормов на животноводческих фермах. Известен способ раздачи кормов животным и устройство для его осущест- . вления с распределением корма вдоль кормушки, равномерно перемещающимся внутри ее рабочим органом, например конвейерной пентой-, на которую непрерывно подают корм. Устройство для осуществления этого способа включает приемную воронку, датчик поступления корма, кормугаку, рабочий орган, расположенный внутри кормушки, привод и схему управления приводом . Недостатком способа и устройства для его осуществления является неравномерность распределения корма, возникающая вследствие совмещения про- цесса раздачи и поедания. Цель изобретения - устранение неравномерности распределения корма. во пр ля си ре ре гд икакнцей вследствие совмещения есса его раздачи и поедания. ель достигается тем, что опредескорость поедания корма, в зависти от которой рабочий орган пещают с ускорением а, которое опляется из условия а. V,, q() V, - начальная скорость, определяемая уравнением ) q - норма вьщачи корма; Л - скорость поедания корма животными;N - количество животнйх; -фронт кормления на .одну голову;-производительность подакнцего механизма. при этом схема управления приводом снабжена регулятором скорости передвижения рабочего органа, соединенным со входом сумматора, задатчиками нормы выдачи корма, количества животных фронта кормления, производительности подающего механизма, скорости поеданаия корма и датчика положения рабочего органа, причем выход сумматора связан со входом регулятора скорости передвижения рабочего органа. Способ осуществляется следующим образом. Начальную скорость V и ускорение а рабочего органа рассчитывают в зависимости от задаваемых величин: нор мы вьщачи корма одному животному (q) количества животных (N), фронта корм ления на одну голову (О и определяемой величины - скорости поедания корма (dL) . Для определения закономерностей исходят из того, что каждому животно му в момент остановки рабочего органа завершения процесса раздачи) дол на быть раздана доза корма, равная . заданной норме минус количество корма, съеденного им во время раздачи. На чертеже представлена схема уст ройства кормления ливотных. Устройство состоит из рабочего ор гана 1, например конвейерной ленты, расположенного внутри кормушки (начертеже не показано) , приемной ворон ки 2, с датчиком поступления корма 3 датчика положения рабочего органа пройденного путк 4, привода 5 с регу лятором скорости 6, сумматором 7, за датчиков: требуемой нормы выдачи 8, скорости поедания 9, количества животных 10, фронта кормления 11, прои водительности подаваемого механизма 1 2 . Устройство работа:ет следующим образом. Рабочий орган , на который непрерывно подается корм, перемещается ускоренно. При поступлении первой порции корма в приемную воронку срабатывает датчик поступления корма 3 и запускает привод 5, который начинает перемещать рабочий орган 1 со скоростью, определяемой положениями задатчиков 8-12. По мере движения рабочего органа 1 изменяется сигнал с датчика положения 4 и, как следствие, изменяется сигнал на выходе сум матора 7, поступающий на вход регуля тора скорости 6. Регулятор 6, воздействуя на привод 5, увеличивает скорость передвижения рабочего органа. При достижении рабочим органом конечного положения (последнего животного) привод 5 отключается. Предлагаемое устройство исключает неравномерность распределения корма вдоль фронта кормления, возниканщую вследствие совмещения процесса раздачи и поедания без специальных устройств, предотвращающих доступ животных к корму во время его разда ш. Формула изобретения I. Способ раздачи кормив животным, заключающийся в том, что распределение корма вдоль кормушки производится перемещающимся внутри рабочим органом, на который непрерывно подается корм, отличающийся тем, что, с целью устранения неравномерное- ти его распределения вдоль фронта кормления, возникающей вследствие совмещения процесса раздачи и поедания кормов, определяют скорость поедания корма, в зависимости от которой рабочий орган перемещают с ускорением а. которое определяют из условия 2 . Q :::ZN) где V, - начальная скорость, определяемая уравнением V Q(Q - °) м qjQ+oCN-ZTT q - норма вьщачи корма одному животному; « - скорость поедания корма животными;N - количество животных; t - фронт кормления на одну голову;Q - производительность подающего механизма. 2 Устройство для осуществления способа по п. 1, включающее приемную воронку, датчик поступления корма, кормушку, рабочий орган, расположенньй внутри кормушки, привод и схему управления приводом, о т л и ч а ющ е е с я тем, что, схема управления приводом снабжена регулятором скорости передвижения рабочего органа, соединенным со входом сумматора, задатчиками нормы вьедачи корма, количества животных, фронта кормления, про. изводительности подающего механизма, скорости поедания корма и датчика по дожения рабочего органа, причем выход сумматора связан со входом регулятора
скорости передвижения рабочего орглна. Источники информации npHHHiibie во внимание при экспертизе
1. Патент СИЛ 3333574, кл. 119-51, 1964 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ раздачи корма животным и устройство для его осуществления | 1982 |
|
SU1029931A1 |
| Способ раздачи корма животным и устройство для его осуществления | 1987 |
|
SU1570683A1 |
| Способ раздачи кормов животным | 1989 |
|
SU1666000A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1985 |
|
SU1304790A1 |
| Устройство для управления дозатором кормораздатчика | 1986 |
|
SU1355959A1 |
| Кормораздатчик | 1987 |
|
SU1496729A1 |
| Способ раздачи зерновой смеси крупному рогатому скоту на откорме | 2022 |
|
RU2791733C1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Способ приготовления, раздачи текучих кормов и группового кормления животных | 1988 |
|
SU1604292A1 |
| КОРМУШКА ДЛЯ ОВЕЦ | 1998 |
|
RU2125790C1 |
