Область техники
Настоящее изобретение относится к измерительной электронике и, более конкретно, к способам и диагностике для поверки измерителей в вибрационных расходомерах.
Постановка задачи
Вибрационные трубопроводные датчики, такие как массовые расходомеры Кориолиса или вибрационные трубопроводные плотномеры, как правило, работают посредством регистрации движения колеблющегося трубопровода с протекающим по нему материалом. Свойства, относящиеся к материалу в трубопроводе, такие как массовый расход, плотность и т.п., могут определяться с помощью обработки измерительных сигналов, принимаемых от преобразователей движения, связанных с трубопроводом. На режимы колебаний вибрирующей системы, наполненной материалом, обычно влияют комбинированные характеристики массы, жесткости и затухания колебаний вмещающего трубопровода и содержащегося в нем материала.
Трубопровод вибрационного расходомера может включать в себя одну или более расходомерных трубок. Расходомерную трубку заставляют колебаться на резонансной частоте, причем резонансная частота этой трубки пропорциональна плотности находящейся в ней текучей среды. Датчики, расположенные на впускной и выпускной секциях трубки, измеряют относительные колебания между концами трубки. При потоке колеблющаяся трубка и протекающая масса ввиду действия сил Кориолиса представляют одно целое, что приводит к фазовому сдвигу в колебаниях между концами трубки. Этот фазовый сдвиг прямо пропорционален массовому расходу.
Типовой массовый расходомер Кориолиса включает в себя один или более трубопроводов, которые встроены в магистраль или другую транспортную систему и переносят в ней материал, например, текучие среды, суспензии и т.п. Каждый трубопровод может рассматриваться в качестве имеющего набор режимов собственных колебаний, среди которых имеются, к примеру, простые изгибные, крутильные, радиальные и связанные колебания. При типовом применении измерения массового расхода Кориолиса трубопровод с текущим по нему материалом возбуждают в одном или более режимов колебаний и измеряют соответствующее движение трубопровода в разнесенных по трубопроводу точках. Возбуждение, как правило, обеспечивается исполнительным механизмом, например, электромеханическим устройством по типу привода с линейной обмоткой, которое периодически возмущает трубопровод. Удельный массовый расход может определяться с помощью измерения времени запаздывания или разности фаз между колебаниями в местоположениях преобразователей. Два таких преобразователя (или тензометрических датчика) обычно используются для измерения ответных колебаний расходомерного трубопровода или трубопроводов и, как правило, располагаются в положениях выше и ниже по течению относительно исполнительного механизма. С помощью кабельной проводки указанные тензометрические датчики подключаются к электронной измерительной аппаратуре. Измерительная аппаратура принимает от этих двух тензометрических датчиков сигналы и обрабатывает их для получения результата измерения удельного массового расхода.
Разность фаз между сигналами двух датчиков зависит от удельного массового расхода материала, протекающего через расходомерную трубку или расходомерные трубки. Удельный массовый расход материала пропорционален времени запаздывания между сигналами двух датчиков, и, следовательно, удельный массовый расход может быть определен путем умножения времени запаздывания на калибровочный коэффициент расхода (FCF), где время запаздывания определяется разностью фаз, деленной на частоту. FCF отражает свойства материала и свойства поперечного сечения расходомерной трубки. В предшествующем уровне техники FCF определяется с помощью процесса калибровки до установки расходомера в магистраль или другой трубопровод. В процессе калибровки текучую среду пропускают через расходомерную трубку при заданном удельном расходе и рассчитывают коэффициент пропорциональности (FCF) между разностью фаз или временем запаздывания и удельным расходом.
Одним из преимуществ расходомера Кориолиса является то, что точность измерения удельного массового расхода не подвергается влиянию износа движущихся деталей расходомера. Удельный расход определяется путем умножения разности фаз или времени запаздывания между двумя точками расходомерной трубки на калибровочный коэффициент расхода. Единственными входными данными являются поступающие от датчиков синусоидальные сигналы, которые отражают колебания двух точек расходомерной трубки. Соответствующая разность фаз вычисляется по этим синусоидальным сигналам. Колеблющаяся расходомерная трубка не содержит движущихся деталей. Поэтому измерение разности фаз и калибровочного коэффициента расхода не подвергается влиянию износа движущихся деталей расходомера.
Проблема заключается в том, что расходомерные трубки со временем могут изменяться, и начальная заводская калибровка также может изменяться по мере того, как расходомерные трубки подвергаются коррозии, эрозии или иным изменениям. Как следствие, жесткость расходомерной трубки может отклоняться от начального репрезентативного значения жесткости (или первоначально измеренного значения жесткости) в течение срока службы вибрационного расходомера.
Измерение удельного массового расхода  может осуществляться согласно следующей формуле:
может осуществляться согласно следующей формуле:

Параметр (Δt) содержит оперативно получаемое (т.е. измеряемое) значение времени запаздывания, которое существует между сигналами тензометрических датчиков, например, ввиду кориолисовых эффектов, влияющих на удельный массовый поток через вибрационный расходомер 5. Измеряемый параметр (Δt) по сути и определяет удельный массовый расход материала, протекающего через вибрационного расходомер 5. Параметр (Δt0) отвечает времени запаздывания при калибровочном коэффициенте нулевого расхода. Параметр (Δt0), как правило, определяется на заводе-изготовителе и содержится в программе вибрационного расходомера 5. Время запаздывания при нулевом расходе (Δt0) не изменится даже ввиду изменений условий потока. Параметр (FCF) пропорционален жесткости расходомера. Параметр (FCF) содержит калибровочный коэффициент расхода и обычно содержит геометрический коэффициент (G), модуль Юнга (E) и момент инерции (I), где:
FCF=G*E*I (2)
Геометрический коэффициент (G) для вибрационного расходомера является фиксированным и не меняется. Модуль Юнга (Е) также не меняется. Момент инерции (I), напротив, является компонентом FCF, который может изменяться.
Массовые расходомеры Кориолиса с большим успехом применяются в самых разнообразных отраслях промышленности. Однако, расходомеры Кориолиса наряду с большинством других расходомеров могут страдать от накопления отложений, оставляемых технологической средой. В данной области техники это накопление, как правило, называют «налетом». В зависимости от характеристик технологической среды образующийся налет (покрытие) может влиять или не влиять на работу и точность расходомера. Например, плотность налета может быть отлична от плотности технологической среды. Это может негативно сказываться на показаниях плотности, получаемых от расходомера. При определенных технологических средах налет внутри расходомера может нарастать до определенной толщины, а затем отламываться в виде мелких хлопьев. Эти мелкие хлопья могут повлиять на другие части процесса, связанные с расходомером. В крайнем случае достаточно толстый налет может привести к забиванию расходомера, что потребует полного выключения или в некоторых случаях полной замены расходомера.
Другие проблемы могут быть вызваны налетом, забиванием, непоследовательными композициями технологических сред, изменением температуры технологической среды и т.д. Например, в лакокрасочной промышленности один и тот же расходомер может быть использован для нескольких цветов краски. Поэтому, даже несмотря на то, что налет может и не приводить к ошибкам показаний измерителя, он может негативно сказываться на конечном продукте.
Ввиду вышеуказанных проблем наряду с другими проблемами, вызванными налетом, желательно своевременно диагностировать образование налета в расходомере. Диагностические способы предшествующего уровня техники по обнаружению налета в расходомере обладают рядом недостатков. Предшествующий уровень техники ограничен в тех случаях, когда плотность налета, по существу, близка к плотности технологической среды. В этих случаях обнаружение налета по плотности не представляется возможным. Кроме того, для тех приложений, про которые известно, что технологическая среда оставляет в расходомере налет, желательно в процессе чистки расходомера иметь возможность определять, когда налет в измерителе удален полностью.
В связи с этим в данной области техники существует потребность в усовершенствованной поверке измерителя, включающей диагностику для обнаружения налета, которая преодолевает вышеуказанные ограничения. Кроме того, существует потребность в усовершенствованной поверке расходомера, включающей диагностику, которая могла бы легко подтвердить обслуживающему оператору, какое именно повреждение, эрозия, коррозия или другое повреждение измерителя, произошло с конкретным расходомером и связана ли погрешность измерения расхода с данной эрозией, коррозией или другим повреждением расходомерной трубки.
Кроме того, в данной области техники существует потребность в улучшенном выявлении изменения калибровочного коэффициента расхода и в минимизации вероятности ложных тревог благодаря улучшенной диагностике и поверке измерителя.
Сущность изобретения
Настоящее изобретение преодолевает вышеизложенные проблемы и совершенствует данную область техники путем обеспечения измерительной электроники для поверки измерителя, включающей диагностику. Преимущественно, настоящее изобретение позволяет диагностическим параметрам поверки предоставлять результат типа «годен/не годен» по отношению к проблемам, связанным с налетом, эрозией, коррозией и другими повреждениями измерителя.
Кроме того, настоящее изобретение совершенствует данную область техники благодаря надежному выявлению изменения калибровочного коэффициента расхода и минимизации вероятности ложных тревог с помощью улучшенной поверки и диагностики измерителей.
Аспекты изобретения
В соответствии с одним из аспектов настоящего изобретения вибрационный расходомер для поверки измерителя содержит: сборку расходомера, включающую в себя одну или более расходомерных трубок и первый и второй тензометрические датчики; привод, выполненный с возможностью возбуждать колебания одной или более расходомерных трубок; и измерительную электронику, соединенную с первым и вторым тензометрическими датчиками и соединенную с приводом, при этом измерительная электроника выполнена с возможностью: возбуждать колебания сборки расходомера в одномодовом режиме с помощью привода, определять ток одномодового режима привода и определять первое и второе напряжения отклика, генерируемые соответственно первым и вторым тензометрическими датчиками, вычислять амплитудно-частотные характеристики для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для вычисления жесткости измерителя и поверять надлежащую работу вибрационного расходомера, используя значение жесткости измерителя.
Предпочтительно значение жесткости измерителя включает в себя поправку на плотность.
Предпочтительно поправка на плотность включает в себя вычисление ожидаемой жесткости.
Предпочтительно значение жесткости измерителя включает в себя поправку на давление.
Предпочтительно операция поверки вибрационного расходомера, использующая значение жесткости измерителя, включает в себя определение разности между значением жесткости измерителя и базовым значением жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном жесткости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью сравнения значения жесткости измерителя с предварительно заданным диапазоном жесткости, генерирования индикации поверки вибрационного расходомера, если значение жесткости измерителя находится в пределах предварительно заданного диапазона жесткости, и генерирования индикации отсутствия поверки вибрационного расходомера, если значение жесткости измерителя находится за пределами предварительно заданного диапазона жесткости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью вычисления разности значений жесткости измерителя на первом и втором тензометрических датчиках и поверки надлежащей работы вибрационного расходомера с использованием вычисленной разности значений жесткости измерителя.
Предпочтительно операция поверки вибрационного расходомера, использующая вычисленную разность значений жесткости измерителя, включает в себя: определение разности между вычисленной разностью значений жесткости измерителя и базовой разностью значений жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений жесткости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью сравнения вычисленной разности значений жесткости измерителя с предварительно заданным диапазоном разности значений жесткости, генерирования индикации поверки вибрационного расходомера, если вычисленная разность значений жесткости измерителя находится в пределах предварительно заданного диапазона разности значений жесткости, и генерирования индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений жесткости измерителя находится за пределами предварительно заданного диапазона разности значений жесткости.
В соответствии с одним из аспектов настоящего изобретения вибрационный расходомер для поверки измерителя содержит: сборку расходомера, включающую в себя одну или более расходомерных трубок и первый и второй тензометрические датчики; привод, выполненный с возможностью возбуждать колебания одной или более расходомерных трубок; и измерительную электронику, соединенную с первым и вторым тензометрическими датчиками и соединенную с приводом, при этом измерительная электроника выполнена с возможностью: возбуждать колебания сборки расходомера в одномодовом режиме с помощью привода, определять ток одномодового режима привода и определять первое и второе напряжения отклика, генерируемые соответственно первым и вторым тензометрическими датчиками, вычислять амплитудно-частотные характеристики для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для остаточной упругости и поверять надлежащую работу вибрационного расходомера, используя значение остаточной упругости.
Предпочтительно операция поверки вибрационного расходомера, использующая значение остаточной упругости, включает в себя определение разности между значением остаточной упругости и базовым значением остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном остаточной упругости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью сравнения значения остаточной упругости с предварительно заданным диапазоном остаточной упругости, генерирования индикации поверки вибрационного расходомера, если значение остаточной упругости находится в пределах предварительно заданного диапазона остаточной упругости, и генерирования индикации отсутствия поверки вибрационного расходомера, если значение остаточной упругости находится за пределами предварительно заданного диапазона остаточной упругости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью вычисления разности значений остаточной упругости на первом и втором тензометрических датчиках и поверки надлежащей работы вибрационного расходомера с использованием вычисленной разности значений остаточной упругости.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений остаточной упругости, включает в себя: определение разности между вычисленной разностью значений остаточной упругости и базовой разностью значений остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений остаточной упругости.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью: сравнения вычисленной разности значений остаточной упругости с предварительно заданным диапазоном разности значений остаточной упругости, генерирования индикации поверки вибрационного расходомера, если вычисленная разность значений остаточной упругости находится в пределах предварительно заданного диапазона разности значений остаточной упругости, и генерирования индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений остаточной упругости находится за пределами предварительно заданного диапазона разности значений остаточной упругости.
В соответствии с одним из аспектов настоящего изобретения вибрационный расходомер для поверки измерителя содержит: сборку расходомера, включающую в себя одну или более расходомерных трубок и первый и второй тензометрические датчики; привод, выполненный с возможностью возбуждать колебания одной или более расходомерных трубок; и измерительную электронику, соединенную с первым и вторым тензометрическими датчиками и соединенную с приводом, при этом измерительная электроника выполнена с возможностью: возбуждать колебания сборки расходомера в одномодовом режиме с помощью привода, определять ток одномодового режима привода, а также первое и второе напряжения отклика, генерируемые соответственно первым и вторым тензометрическими датчиками, вычислять амплитудно-частотные характеристики для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для вычисления значения массы измерителя и поверять надлежащую работу вибрационного расходомера, используя значение массы измерителя.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью вычисления разности значений массы измерителя на первом и втором тензометрических датчиках и поверки надлежащей работы вибрационного расходомера с использованием вычисленной разности значений массы измерителя.
Предпочтительно операция поверки вибрационного расходомера, использующая вычисленную разность значений массы измерителя, включает в себя: определение разности между вычисленной разностью значений массы измерителя и базовой разностью значений массы измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений массы.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью сравнения вычисленной разности значений массы измерителя с предварительно заданным диапазоном разности значений массы, генерирования индикации поверки вибрационного расходомера, если вычисленная разность значений массы измерителя находится в пределах предварительно заданного диапазона разности значений массы, и генерирования индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений массы измерителя находится за пределами предварительно заданного диапазона разности значений массы.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью использования плотности текучей среды для вычисления ожидаемого отклонения массы на первом и втором тензометрических датчиках и поверки надлежащей работы вибрационного расходомера с использованием ожидаемого отклонения массы.
Предпочтительно при этом плотность текучей среды включает в себя по меньшей мере одну из измеренной плотности текучей среды и введенной ожидаемой плотности текучей среды.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью вычисления разности значений ожидаемого отклонения массы на первом и втором тензометрических датчиках и поверки надлежащей работы вибрационного расходомера с использованием вычисленной разности значений ожидаемого отклонения массы.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений ожидаемого отклонения массы, включает в себя: определение разности между вычисленной разностью значений ожидаемого отклонения массы и базовой разностью значений ожидаемого отклонения массы, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений ожидаемого отклонения массы.
Предпочтительно измерительная электроника дополнительно выполнена с возможностью сравнения вычисленной разности значений ожидаемого отклонения массы с предварительно заданным диапазоном разности значений ожидаемого отклонения массы, генерирования индикации поверки вибрационного расходомера, если вычисленная разность значений ожидаемого отклонения массы находится в пределах предварительно заданного диапазона разности значений ожидаемого отклонения массы, и генерирования индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений ожидаемого отклонения массы находится за пределами предварительно заданного диапазона разности значений ожидаемого отклонения массы.
В соответствии с одним из аспектов настоящего изобретения способ поверки измерителя для вибрационного расходомера включает в себя: возбуждение колебаний сборки вибрационного расходомера в одномодовом режиме с помощью привода; определение тока одномодового режима привода, а также определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками; вычисление амплитудно-частотных характеристик для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима; аппроксимацию генерируемых амплитудно-частотных характеристик моделью c вычетом в полюсе для получения жесткости измерителя; и поверку надлежащей работы вибрационного расходомера с использованием значения жесткости измерителя.
Предпочтительно значение жесткости измерителя включает в себя поправку на плотность.
Предпочтительно при этом поправка на плотность включает в себя вычисление ожидаемой жесткости.
Предпочтительно при этом значение жесткости измерителя включает в себя поправку на давление.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая значение жесткости измерителя, включает в себя определение разности между значением жесткости измерителя и базовым значением жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном жесткости.
Предпочтительно измерительная электроника дополнительно содержит: сравнение значения жесткости измерителя с предварительно заданным диапазоном жесткости, генерирование индикации поверки вибрационного расходомера, если значение жесткости измерителя находится в пределах предварительно заданного диапазона жесткости, и генерирование индикации отсутствия поверки вибрационного расходомера, если значение жесткости измерителя находится за пределами предварительно заданного диапазона жесткости.
Предпочтительно измерительная электроника дополнительно содержит: вычисление разности значений жесткости расходомера на первом и втором тензометрических датчиках и поверку надлежащей работы вибрационного расходомера с использованием вычисленной разности значений жесткости измерителя.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений жесткости измерителя, включает в себя: определение разности между вычисленной разностью значений жесткости измерителя и базовой разностью значений жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений жесткости.
Предпочтительно измерительная электроника дополнительно содержит: сравнение вычисленной разности значений жесткости измерителя с предварительно заданным диапазоном разности значений жесткости, генерирование индикации поверки вибрационного расходомера, если вычисленная разность значений жесткости измерителя находится в пределах предварительно заданного диапазона разности значений жесткости, и генерирование индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений жесткости измерителя находится за пределами предварительно заданного диапазона разности значений жесткости.
В соответствии с одним из аспектов настоящего изобретения способ поверки измерителя для вибрационного расходомера включает в себя: возбуждение колебаний сборки вибрационного расходомера в одномодовом режиме с помощью привода; определение тока одномодового режима привода, а также определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками; вычисление амплитудно-частотных характеристик для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима; аппроксимацию генерируемых амплитудно-частотных характеристик моделью c вычетом в полюсе для остаточной упругости; и поверку надлежащей работы вибрационного расходомера с использованием значения остаточной упругости.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая значение остаточной упругости, включает в себя определение разности между значением остаточной упругости и базовым значением остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном остаточной упругости.
Предпочтительно измерительная электроника дополнительно содержит: сравнение значения остаточной упругости с предварительно заданным диапазоном остаточной упругости, генерирование индикации поверки вибрационного расходомера, если значение остаточной упругости находится в пределах предварительно заданного диапазона остаточной упругости, и генерирование индикации отсутствия поверки вибрационного расходомера, если значение остаточной упругости находится за пределами предварительно заданного диапазона остаточной упругости.
Предпочтительно измерительная электроника дополнительно содержит: вычисление разности значений остаточной упругости на первом и втором тензометрических датчиках и поверку надлежащей работы вибрационного расходомера с использованием вычисленной разности значений остаточной упругости.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений остаточной упругости, включает в себя: определение разности между вычисленной разностью значений остаточной упругости и базовой разностью значений остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений остаточной упругости.
Предпочтительно измерительная электроника дополнительно содержит: сравнение вычисленной разности значений остаточной упругости с предварительно заданным диапазоном разности значений остаточной упругости, генерирование индикации поверки вибрационного расходомера, если вычисленная разность значений остаточной упругости находится в пределах предварительно заданного диапазона разности значений остаточной упругости, и генерирование индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений остаточной упругости находится за пределами предварительно заданного диапазона разности значений остаточной упругости.
В соответствии с одним из аспектов настоящего изобретения способ поверки измерителя для вибрационного расходомера включает в себя: возбуждение колебаний сборки вибрационного расходомера в одномодовом режиме с помощью привода; определение тока одномодового режима привода, а также определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками; вычисление амплитудно-частотных характеристик для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима; аппроксимацию генерируемых амплитудно-частотных характеристик моделью с вычетом в полюсе для получения значения массы измерителя; и поверку надлежащей работы вибрационного расходомера с использованием значения массы измерителя.
Предпочтительно измерительная электроника дополнительно содержит: вычисление разности значений массы измерителя на первом и втором тензометрических датчиках и поверку надлежащей работы вибрационного расходомера с использованием вычисленной разности значений массы измерителя.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений массы измерителя, включает в себя: определение разности между вычисленной разностью значений массы измерителя и базовой разностью значений массы измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений массы.
Предпочтительно измерительная электроника дополнительно содержит: сравнение вычисленной разности значений массы измерителя с предварительно заданным диапазоном разности значений массы, генерирование индикации поверки вибрационного расходомера, если вычисленная разность значений массы измерителя находится в пределах предварительно заданного диапазона разности значений массы, и генерирование индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений массы измерителя находится за пределами предварительно заданного диапазона разности значений массы.
Предпочтительно измерительная электроника дополнительно содержит: использование плотности текучей среды для вычисления ожидаемого отклонения массы на первом и втором тензометрических датчиках и поверку надлежащей работы вибрационного расходомера с использованием ожидаемого отклонения массы.
Предпочтительно при этом плотность текучей среды включает в себя по меньшей мере одну из измеренной плотности текучей среды и введенной ожидаемой плотности текучей среды.
Предпочтительно измерительная электроника дополнительно содержит: вычисление разности значений ожидаемого отклонения массы на первом и втором тензометрических датчиках и поверку надлежащей работы вибрационного расходомера с использованием вычисленной разности значений ожидаемого отклонения массы.
Предпочтительно при этом операция поверки вибрационного расходомера, использующая вычисленную разность значений ожидаемого отклонения массы, включает в себя: определение разности между вычисленной разностью значений ожидаемого отклонения массы и базовой разностью значений ожидаемого отклонения массы, при этом определяемая разность сравнивается с предварительно заданным диапазоном разности значений ожидаемого отклонения массы.
Предпочтительно измерительная электроника дополнительно содержит: сравнение вычисленной разности значений ожидаемого отклонения массы с предварительно заданным диапазоном разности значений ожидаемого отклонения массы, генерирование индикации поверки вибрационного расходомера, если вычисленная разность значений ожидаемого отклонения массы находится в пределах предварительно заданного диапазона разности значений ожидаемого отклонения массы, и генерирование индикации отсутствия поверки вибрационного расходомера, если вычисленная разность значений ожидаемого отклонения массы находится за пределами предварительно заданного диапазона разности значений ожидаемого отклонения массы.
Описание чертежей
Одна и та же ссылочная позиция относится к одному и тому же элементу на всех чертежах. Чертежи не обязательно выполнены в масштабе.
На фиг.1 показан вибрационный расходомер для поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.2 показана измерительная электроника для поверки измерителя вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.3 представлен график амплитудно-частотной характеристики, иллюстрирующей влияние остаточной упругости.
На фиг.4 представлен вибрационный расходомер с изогнутыми расходомерными трубками, в котором две параллельные изогнутые расходомерные трубки колеблются в режиме изгибных колебаний.
На фиг.5 представлена блок-схема способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.6 представлена блок-схема способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.7 представлена блок-схема способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.8 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.9 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.10 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.11 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.12 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.13 показано графическое представление поверки расходомера в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.14 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.15 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.16 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.17 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.18 показано графическое представление поверки измерителя в соответствии с одним из вариантов осуществления настоящего изобретения.
Подробное описание изобретения
Фиг.1-18 и последующее описание иллюстрируют конкретные примеры, после изучения которых специалисты в данной области техники смогут реализовать и использовать наилучший вариант осуществления настоящего изобретения. С целью обучения принципам настоящего изобретения некоторые упомянутые аспекты были упрощены или опущены. Специалистам в данной области техники должно быть понятно, какие варианты на основе этих примеров попадают под объем настоящего изобретения. Специалистам в данной области техники также должно быть понятно, что описанные ниже признаки могут комбинироваться различным образом, формируя многочисленные варианты настоящего изобретения. Таким образом, объем настоящего изобретения не ограничен конкретными примерами, описанными ниже, а определяется только формулой изобретения и ее эквивалентами.
На фиг.1 показан расходомер 5, содержащий сборку 10 измерителя и измерительную электронику 20. Сборка 10 измерителя реагирует на удельный массовый расход и плотность технологического материала. Измерительная электроника 20 соединена со сборкой 10 измерителя через провода 100 для предоставления информации о плотности, удельном массовом расходе и температуре по каналу 26, также как и другой информации, не относящейся к настоящему изобретению. Несмотря на то, что описывается конструкция расходомера Кориолиса, специалистам в данной области техники должно быть очевидно, что настоящее изобретение могло бы быть осуществлено на практике в качестве вибрационного трубчатого плотномера без дополнительной измерительной возможности, предоставляемой массовым расходомером Кориолиса.
Сборка 10 измерителя включает в себя пару патрубков 150 и 150', фланцы 103 и 103' c горловинами 110 и 110', пару параллельных расходомерных трубок 130 и 130', механизм привода 180, датчик температуры 190 и пару датчиков скорости 170L и 170R. Расходомерные трубки 130 и 130' содержат два по существу прямых впускных колена 131 и 131' и выпускных колена 134 и 134', которые сходятся в направлении друг к другу на монтажных блоках 120 и 120' расходомерных трубок. Расходомерные трубки 130 и 130' изгибаются в двух симметричных по своей длине местах и по существу параллельны по всей своей длине. Пластины 140 и 140' ребер жесткости служат для определения осей W и W', около которых колеблется каждая расходомерная трубка.
Боковые ветви 131, 131' и 134, 134' расходомерных трубок 130 и 130' жестко закреплены на монтажных блоках 120 и 120' расходомерных трубок, а эти блоки, в свою очередь, жестко закреплены на патрубках 150 и 150'. Это обеспечивает непрерывный замкнутый путь материала через сборку 10 измерителя Кориолиса.
Когда фланцы 103 и 103' с отверстиями 102 и 102' подсоединены через впускной конец 104 и выпускной конец 104' к технологической линии (не показана), которая переносит технологический материал, подлежащий измерению, материал поступает в конец измерителя 104 через отверстие 101 во фланце 103 и проводится через патрубок 150 в монтажный блок 120 расходомерной трубки, имеющий поверхность 121. Внутри патрубка 150 материал разделяется и направляется через расходомерные трубки 130 и 130'. После выхода из расходомерных трубок 130 и 130' технологический материал снова объединяется в единый поток в патрубке 150' и затем направляется к выходному концу 104', подсоединенному фланцем 103' с болтовыми отверстиями 102' к технологической линии (не показана).
Расходомерные трубки 130 и 130' выбираются и надлежащим образом устанавливаются на монтажные блоки 120 и 120' расходомерных трубок, с тем чтобы иметь по существу одинаковые распределения масс, моменты инерции и модули Юнга вокруг осей изгиба W--W и W'--W' соответственно. Данные оси изгиба проходят через пластины 140 и 140' ребер жесткости. Ввиду того, что модуль Юнга расходомерных трубок меняется в зависимости от температуры и это изменение сказывается на вычислении расхода и плотности, на расходомерной трубке 130' установлен резистивный термодатчик (RTD) 190 для непрерывного измерения температуры расходомерной трубки. Температура расходомерной трубки, а следовательно, и напряжение, возникающее на выводах RTD для проходящего через него заданного тока, обусловлены температурой материала, протекающего через расходомерную трубку. Зависящее от температуры напряжение, которое возникает на выводах RTD, хорошо известным образом используется измерительной электроникой 20 для компенсации изменения модуля упругости расходомерных трубок 130 и 130', обусловленного любыми изменениями температуры расходомерной трубки. RTD подключен к измерительной электронике 20 с помощью провода 195.
Обе расходомерные трубки 130 и 130' приводятся в движение приводом 180 в противоположных направлениях относительно соответствующих осей изгиба W и W' и в так называемом первом режиме несинфазных изгибных колебаний расходомера. Данный механизм привода 180 может обладать любой из многочисленных хорошо известных конструкций, например, он может быть выполнен в виде установленного на расходомерной трубке 130' магнита и противоположно установленной на расходомерной трубке 130 катушки, через которую для колебаний обеих расходомерных трубок пропускается переменный ток. Подходящий сигнал возбуждения подается измерительной электроникой 20 в механизм привода 180 по проводу 185.
Измерительная электроника 20 принимает сигнал температуры RTD по проводу 195, а также сигналы левой и правой скорости, передаваемые соответственно по проводам 165L и 165R. Измерительная электроника 20 генерирует сигнал возбуждения, передаваемый по проводу 185 для приведения в действие элемента 180 и колебания трубок 130 и 130'. Измерительная электроника 20 обрабатывает сигналы левой и правой скорости и сигнал RTD для вычисления удельного массового расхода и плотности материала, проходящего через сборку 10 измерителя. Данная информация наряду с другой информацией передается измерительной электроникой 20 средствам использования 29 по каналу 26.
На фиг.2 показана измерительная электроника 20 в соответствии с одним из вариантов осуществления настоящего изобретения. Измерительная электроника 20 может включать в себя интерфейс 201 и систему обработки 203. Измерительная электроника 20 принимает сигнал 208 ответных колебаний, например, такой как из сборки 10 измерителя. Измерительная электроника 20 обрабатывает сигнал 208 ответных колебаний для получения характеристик расхода материала, протекающего через сборку 10 измерителя.
Как уже обсуждалось ранее, калибровочный коэффициент расхода (FCF) отражает свойства материала и свойства поперечного сечения расходомерной трубки. Удельный массовый расход материала, протекающего через расходомер, определяется путем умножения измеренного времени запаздывания (или разности фаз/ частоты) на FCF. FCF может зависеть от характеристики жесткости сборки измерителя. Если характеристика жесткости сборки измерителя меняется, то FCF также будет меняться. Следовательно, изменения в жесткости расходомера будут оказывать влияние на точность измерений параметров расхода, генерируемых расходомером.
Интерфейс 201 принимает сигнал 208 ответных колебаний от одного из датчиков скорости 170L и 170R по проводам 100 на фиг.1. Интерфейс 201 может выполнять любое необходимое или желательное преобразование сигнала, такое как любой способ форматирования, усиления, буферизации и т. п. В качестве альтернативы частичное или полное преобразование сигнала может выполняться в системе обработки 203. Кроме того, интерфейс 201 может обеспечивать связь между измерительной электроникой 20 и внешними устройствами. Интерфейс 201 может иметь возможность реализовывать любой способ электронной, оптической или беспроводной связи.
В одном из вариантов осуществления интерфейс 201 связан с цифровым преобразователем (не показан), при этом сигнал датчика является аналоговым. Цифровой преобразователь дискретизирует и оцифровывает аналоговый сигнал ответных колебаний и производит цифровой сигнал ответных колебаний 208.
Система обработки 203 управляет операциями измерительной электроники 20 и обрабатывает измерения параметров расхода, получаемые от сборки 10 измерителя. Система обработки 203 выполняет одну или более процедур обработки и посредством этого обрабатывает измерения параметров расхода для получения одной или более характеристик расхода.
Система обработки 203 может включать в себя компьютер общего назначения, микропроцессорную систему, логическую схему или некоторое другое универсальное или специализированное устройство обработки. Система обработки 203 может быть распределена между множеством устройств обработки. Система обработки 203 может включать в себя любой вид встроенного или независимого электронного запоминающего устройства, такого как система хранения 204.
Система хранения 204 может хранить данные и параметры расходомера, системные программы, постоянные и переменные значения. В одном из вариантов осуществления система хранения 204 хранит программы, выполняемые системой обработки 203, такие как операционная программа 210 и программа поверки 213 расходомера 5.
Система хранения 204 может хранить значение 216 жесткости измерителя. Значение 216 жесткости измерителя содержит значение жесткости, которое определяется на основе сигналов ответных колебаний, генерируемых в процессе работы вибрационного расходомера 5. Значение 216 жесткости измерителя может быть сформировано для поверки надлежащей работы вибрационного расходомера 5. Значение 216 жесткости измерителя может быть сформировано для процесса поверки, в котором значение 216 жесткости измерителя служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
Система хранения 204 может хранить ожидаемое значение 217 жесткости. Ожидаемая жесткость может быть вычислена на основе базовой заводской жесткости 209, определяемой при прогоне воздуха и воды, и использоваться для нормировки измеренной жесткости с целью устранения какой-либо зависимости от плотности. Вычисление ожидаемой жесткости описано в последующих абзацах. Ожидаемая жесткость 217 может быть сформирована для поверки надлежащей работы вибрационного расходомера 5.
Система хранения 204 может хранить ток 230 одномодового режима. Приводной ток 230 одномодового режима может содержать ток привода/возбуждения или токи, используемые для генерирования одномодового режима колебаний в сборке 5 расходомера и сигналов поверки измерителя. Приводной ток 230 одномодового режима может содержать ток привода 180. Приводной ток 230 одномодового режима может содержать заданный ток для одномодового режима колебаний (т.е. ток, предусмотренный для привода 180) или измеренный ток одномодового режима колебаний (т.е. ток, фактически протекающий через привод).
Система хранения 204 может хранить напряжения 231 отклика на одномодовый режим. Напряжение 231 отклика на основной режим может содержать синусоидальные сигналы напряжения или уровни напряжения, генерируемые в ответ на режим колебаний. Напряжения 231 отклика на одномодовый режим могут содержать сигналы напряжения или уровни напряжения (например, пиковые напряжения), генерируемые одним или обоими, первым и вторым тензометрическими датчиками 170L и 170R. Напряжения отклика также будут включать в себя частотные характеристики инициирующих сигналов поверки измерителя. В некоторых вариантах осуществления система хранения 204 может хранить напряжения 231 отклика на одномодовый режим, соответствующие первому и второму тензометрическим датчикам 170L и 170R.
Значение 216 жесткости измерителя может быть получено на основе информации или измерений, генерируемых в течение одномодового режима колебаний.
Ответные колебания расходомера могут быть описаны уравнением второго порядка модели вынужденных колебаний с затуханием, которое имеет вид:

где f - это сила, прикладываемая к системе, М - параметр массы системы, С - параметр затухания, а K - параметр жесткости. Параметр ζ является характеристикой затухания. Переменная x отвечает величине физического смещения при колебаниях,  является скоростью смещения расходомерной трубки, а
является скоростью смещения расходомерной трубки, а  - ускорением. Эту модель обычно называют MCK-моделью. Данное уравнение может быть преобразовано к следующему виду:
- ускорением. Эту модель обычно называют MCK-моделью. Данное уравнение может быть преобразовано к следующему виду:

Пренебрегая начальными условиями, из уравнения (4) можно получить вид передаточной функции. Результат:
С помощью дальнейших манипуляций формула (5) может быть преобразована в амплитудно-частотную характеристику с вычетом в полюсе первого порядка, которая имеет вид:

где λ является полюсом, R - вычет, элемент (j) содержит квадратный корень из (-1), а ω - угловая частота возбуждения в радианах в секунду.
Параметры системы, содержащие собственную/резонансную частоту (ωn), собственную частоту затухающих колебаний (ωd) и характеристику затухания (ζ), определяются полюсом.
Параметр жесткости (K), параметр затухания (C) и параметр массы (M) системы могут быть получены из полюса и вычета.
Следовательно, параметр жесткости (K), параметр массы (M) и параметр затухания (C) могут быть вычислены на основе хорошей оценки полюса (λ) и вычета (R).
Полюс и вычет оцениваются на основе измеренных амплитудно-частотных характеристик (АЧХ). Полюс (λ) и вычет (R) могут быть оценены, например, с помощью итерационного вычислительного способа.
Система хранения 204 может хранить базовую жесткость 209 измерителя, определяемую при прогоне воздуха и воды и программируемую в измерительную электронику 20. В некоторых вариантах осуществления базовая жесткость 209 измерителя, определяемая при прогоне воздуха и воды, может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая жесткость 209 измерителя, определяемая при прогоне воздуха и воды, может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая жесткость 209 измерителя, определяемая при прогоне воздуха и воды, в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если значение 216 жесткости измерителя является по существу таким же, как и базовая жесткость 209 измерителя, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда значение 216 жесткости измерителя существенно отличается от базовой жесткости 209 измерителя, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
Система хранения 204 может хранить предварительно заданный диапазон 219 жесткости. Предварительно заданный диапазон 219 жесткости содержит выбранный диапазон допустимых значений жесткости. Предварительно заданный диапазон 219 жесткости может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
В одном из вариантов осуществления система хранения 204 хранит базовую разность 224 значений жесткости измерителя. В некоторых вариантах осуществления базовая разность 224 значений жесткости измерителя может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая разность 224 значений жесткости измерителя может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая разность 224 значений жесткости измерителя в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если разность значений жесткости измерителя на первом и втором тензометрических датчиках 170L и 170R является по существу такой же, как и базовая разность 224 значений жесткости измерителя, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда разность значений жесткости измерителя на первом и втором тензометрических датчиках 170L и 170R существенно отличается от базовой разности 224 значений жесткости измерителя, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 225 разности значений жесткости измерителя. Предварительно заданный диапазон 225 разности значений жесткости измерителя содержит выбранный диапазон допустимых значений разности значений жесткости измерителя. Предварительно заданный диапазон 225 разности значений жесткости измерителя может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
В одном из вариантов осуществления система хранения 204 хранит остаточную упругость 218 измерителя. Остаточная упругость 218 измерителя включает в себя остаточную упругость измерителя, которая определяется на основе сигналов ответных колебаний, генерируемых в процессе работы вибрационного расходомера 5. Определение остаточной упругости требует лишь дополнительной аппроксимации кривой в процессе вычисления жесткости, что, в свою очередь, требует лишь дополнительной итерации алгоритма аппроксимации или процесса для уравнения (16) в некоторых вариантах осуществления.
На фиг.3 представлены графики трех АЧХ, иллюстрирующих влияние остаточной упругости, в координатах амплитуды (A) от частоты (f). Пик амплитуды FRF1 возникает на первой резонансной частоте ω1. Пики амплитуд FRF2 и FRF3 возникают на резонансных частотах ω2 и ω3. Как видно из графика, FRF2 и FRF3 имеют хвосты, которые влияют на амплитудные значения FRF1, в том числе на резонансной частоте ω1. Данный эффект, оказываемый хвостами FRF2 и FRF3 на колебания на резонансной частоте ω1, называется остаточной упругостью. Аналогично, FRF2 испытывает эффект остаточной упругости, вызванный хвостом FRF3.
Следует отметить, что в предпочтительном измерении АЧХ две АЧХ измеряются для конкретной частоты возбуждения и ответных колебаний. Одно измерение АЧХ получают на участке от привода до правого тензометрического датчика (RPO) и еще одно измерение АЧХ получают на участке от привода до левого тензометрического датчика (LPO). Такой подход называют подходом с одним входом и множеством выходов (SIMO). Учитывая, что две АЧХ имеют общий полюс (λ), но разные вычеты (RL) и (RR), два измерения могут быть объединены с преимуществом для получения более устойчивого определения полюса и вычета:
Уравнение (13) может быть решено любым способом. В одном из вариантов осуществления данное уравнение решается с помощью рекурсивного метода наименьших квадратов. В другом варианте осуществления данное уравнение решается методом псевдоинверсии. В еще одном варианте осуществления, ввиду того что все измерения имеются в распоряжении одновременно, может использоваться стандартный метод QR-разложения. Метод QR-разложения изложен в Modern Control Theory, William Brogan, Copyright 1991, Prentice Hall, с.222-224, 168-172.
В соответствии с фиг.2 остаточная упругость 218 измерителя может быть сформирована для поверки надлежащей работы вибрационного расходомера 5. Остаточная упругость 218 измерителя может быть сформирована для процесса поверки, в котором остаточная упругость 218 измерителя служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
Модель с вычетом в полюсе может быть изменена с целью включения одного элемента Φ остаточной упругости для учета совокупного эффекта других режимов. Предполагается, что этот эффект имеет постоянный характер с частотой в пределах локальных измерений вблизи режима привода. Это действительно будет так, если все остальные режимы будут иметь более высокие частоты по сравнению с режимом привода и будут достаточно далеки от того, чтобы выдавать чистую жесткость. Модифицированную модель с вычетом в полюсе теперь будем называть моделью с вычетом в полюсе для остаточной упругости:

Данная модель может быть преобразована в АЧХ скорости, и ее слагаемые могут быть видоизменены для получения более легко решаемой формы:

Уравнение 15 может быть приведено к виду, аналогичному виду уравнения 13, в котором оно легко решается способами линейной алгебры (см. обсуждение после уравнения 13).

Данное уравнение уже не является строго линейным по отношению к неизвестным  ,
, и Φ. Точнее, переменные Φ и
и Φ. Точнее, переменные Φ и  являются взаимозависимыми. С этим уравнением можно справиться с помощью способа простой итерации. Сначала указанную модель решают без отвечающих за остаточную упругость слагаемых (с использованием уравнения 13), чтобы получить начальную оценку полюса. Затем эту оценку используют в качестве начального приближения для первой итерации уравнения 16. Данный подход работает весьма хорошо, поскольку оценка полюса достаточно нечувствительна к относительно небольшой остаточной упругости, гораздо более, нежели вычеты. Каждый раз при расчете уравнения (16) производится новая оценка полюса, и повторять итерации можно до тех пор, пока полюс не стабилизируется (хотя на практике может быть достаточно и одной итерации). В онлайн-реализации, где параметры системы вычисляются для ряда последовательных измерений во времени, в качестве оценки полюса для начального приближения целесообразно или эффективно брать значение из предыдущего временного окна, нежели каждый раз начинать заново с модели без остаточной упругости.
являются взаимозависимыми. С этим уравнением можно справиться с помощью способа простой итерации. Сначала указанную модель решают без отвечающих за остаточную упругость слагаемых (с использованием уравнения 13), чтобы получить начальную оценку полюса. Затем эту оценку используют в качестве начального приближения для первой итерации уравнения 16. Данный подход работает весьма хорошо, поскольку оценка полюса достаточно нечувствительна к относительно небольшой остаточной упругости, гораздо более, нежели вычеты. Каждый раз при расчете уравнения (16) производится новая оценка полюса, и повторять итерации можно до тех пор, пока полюс не стабилизируется (хотя на практике может быть достаточно и одной итерации). В онлайн-реализации, где параметры системы вычисляются для ряда последовательных измерений во времени, в качестве оценки полюса для начального приближения целесообразно или эффективно брать значение из предыдущего временного окна, нежели каждый раз начинать заново с модели без остаточной упругости.
В одном из вариантов осуществления система хранения 204 хранит базовую остаточную упругость 220 измерителя. В некоторых вариантах осуществления базовая остаточная упругость 220 измерителя может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая остаточная упругость 220 измерителя может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая остаточная упругость 220 измерителя в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если остаточная упругость 218 является по существу такой же, как и базовая остаточная упругость 220 измерителя, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда остаточная упругость 218 существенно отличается от базовой остаточной упругости 220 измерителя, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 221 остаточной упругости. Предварительно заданный диапазон 221 остаточной упругости содержит выбранный диапазон допустимых значений остаточной упругости. Предварительно заданный диапазон 221 остаточной упругости может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
В одном из вариантов осуществления система хранения 204 хранит базовую разность 226 значений остаточной упругости измерителя. В некоторых вариантах осуществления базовая разность 226 значений остаточной упругости измерителя может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая разность 226 значений остаточной упругости измерителя может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая разность 226 значений остаточной упругости измерителя в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если разность значений остаточной упругости на первом и втором тензометрических датчиках 170L и 170R является по существу такой же, как и базовая разность 226 значений остаточной упругости измерителя, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда разность значений жесткости измерителя на первом и втором тензометрических датчиках 170L и 170R существенно отличается от базовой разности 226 значений остаточной упругости измерителя, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 227 разности значений остаточной упругости. Предварительно заданный диапазон 227 разности значений остаточной упругости содержит выбранный диапазон допустимых значений разности значений остаточной упругости. Предварительно заданный диапазон 227 разности значений остаточной упругости может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
Система хранения 204 может хранить значение 240 массы измерителя. Значение 240 массы измерителя содержит значение массы, которое определяется на основе сигналов ответных колебаний, генерируемых в процессе работы вибрационного расходомера 5. Значение 240 массы измерителя может быть сформировано для поверки надлежащей работы вибрационного расходомера 5. Значение 240 массы измерителя может быть сформировано для процесса поверки, в котором значение 240 массы измерителя служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
В одном из вариантов осуществления система хранения 204 хранит базовое значение 241 массы, определяемое при прогоне воздуха и воды. В некоторых вариантах осуществления базовое значение 241 массы, определяемое при прогоне воздуха и воды, может быть запрограммировано в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовое значение 241 массы, определяемое при прогоне воздуха и воды, может быть запрограммировано в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовое значение 241 массы, определяемое при прогоне воздуха и воды, в большинстве вариантов осуществления не может быть изменено пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если значение 240 массы является по существу таким же, как и базовое значение 241 массы, определяемое при прогоне воздуха и воды, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда значение 240 массы существенно отличается от базового значения 241 массы, определяемого при прогоне воздуха и воды, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 242 значений массы. Предварительно заданный диапазон 242 значений массы содержит выбранный диапазон допустимых значений массы. Предварительно заданный диапазон 242 значений массы может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
В одном из вариантов осуществления система хранения 204 хранит базовую разность 245 значений массы измерителя. В некоторых вариантах осуществления базовая разность 245 значений массы измерителя может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая разность 245 значений массы измерителя может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая разность 245 значений массы измерителя в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если разность значений массы измерителя на первом и втором тензометрических датчиках 170L и 170R является по существу такой же, как и базовая разность 245 значений массы измерителя, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда разность значений массы измерителя на первом и втором тензометрических датчиках 170L и 170R существенно отличается от базовой разности 245 значений массы измерителя, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 246 разности значений массы измерителя. Предварительно заданный диапазон 246 разности значений массы измерителя содержит выбранный диапазон допустимых значений разности значений массы измерителя. Предварительно заданный диапазон 246 разности значений массы измерителя может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
Система хранения 204 может хранить ожидаемое отклонение 250 массы. Ожидаемое отклонение 250 массы содержит ожидаемое отклонение 250 массы, которое вычисляется на основе базовых заводских значений 241 массы, определяемых при прогоне воздуха и воды, и известной плотности технологической среды. Вычисление ожидаемого отклонения массы описано в последующих абзацах. Ожидаемое отклонение 250 массы может быть сформировано для поверки надлежащей работы вибрационного расходомера 5. Ожидаемое отклонение 250 массы может быть сформировано для процесса поверки, в котором ожидаемое отклонение 250 массы служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
В одном из вариантов осуществления система хранения 204 хранит базовое ожидаемое отклонение 251 массы. В некоторых вариантах осуществления базовое ожидаемое отклонение 251 массы может быть запрограммировано в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовое ожидаемое отклонение 251 массы может быть запрограммировано в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовое ожидаемое отклонение 251 массы в большинстве вариантов осуществления не может быть изменено пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если ожидаемое отклонение 250 массы является по существу таким же, как и базовое ожидаемое отклонение 251 массы, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда ожидаемое отклонение 250 массы существенно отличается от базового ожидаемого отклонения 251 массы, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 252 ожидаемого отклонения массы. Предварительно заданный диапазон 252 ожидаемого отклонения массы содержит выбранный диапазон допустимых значений ожидаемого отклонения массы. Предварительно заданный диапазон 252 ожидаемого отклонения массы может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
В одном из вариантов осуществления система хранения 204 хранит базовую разность 255 значений ожидаемого отклонения массы. В некоторых вариантах осуществления базовая разность 255 значений ожидаемого отклонения массы может быть запрограммирована в измерительную электронику 20 на заводе (или другом объекте производства), например, при изготовлении или продаже вибрационного расходомера 5. В качестве альтернативы базовая разность 255 значений ожидаемого отклонения массы может быть запрограммирована в измерительную электронику 20 при выполнении операции калибровки в условиях эксплуатации или при выполнении операции другой или повторной калибровки. Однако, следует понимать, что базовая разность 255 значений ожидаемого отклонения массы в большинстве вариантов осуществления не может быть изменена пользователем или оператором или во время работы в условиях эксплуатации вибрационного расходомера 5.
Если разность значений ожидаемого отклонения массы на первом и втором тензометрических датчиках 170L и 170R является по существу такой же, как и базовая разность 255 значений ожидаемого отклонения массы, то можно заключить, что состояние вибрационного расходомера 5 относительно не изменилось с того момента, как он был изготовлен, откалиброван, или со времени его последней повторной калибровки. В противном случае, когда разность значений ожидаемого отклонения массы на первом и втором тензометрических датчиках 170L и 170R существенно отличается от базовой разности 255 значений ожидаемого отклонения массы, можно заключить, что состояние вибрационного расходомера 5 ухудшилось и он возможно уже не работает точно и надежно, например, вследствие того, что вибрационный расходомер 5 потерпел изменения из-за вызванной потоком усталости, коррозии или эрозии металла или из-за другого рабочего состояния или эффекта.
В одном из вариантов осуществления система хранения 204 хранит предварительно заданный диапазон 256 разности значений ожидаемого отклонения массы. Предварительно заданный диапазон 256 разности значений ожидаемого отклонения массы содержит выбранный диапазон допустимых значений разности значений ожидаемого отклонения массы. Предварительно заданный диапазон 256 разности значений ожидаемого отклонения массы может быть выбран с учетом коррозии или эрозии в вибрационном расходомере 5.
Система хранения 204 может хранить значение 260 плотности. Значение 260 плотности содержит значение плотности, которое определяется на основе сигналов ответных колебаний, генерируемых в процессе работы вибрационного расходомера 5. Значение 260 плотности может быть сформировано для поверки надлежащей работы вибрационного расходомера 5. Значение 260 плотности может быть сформировано для процесса поверки, в котором значение 260 плотности служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
Система хранения 204 может хранить значение 270 затухания колебаний. Значение 270 затухания колебаний содержит значение плотности, которое определяется на основе сигналов ответных колебаний, генерируемых в процессе работы вибрационного расходомера 5. Значение 270 затухания колебаний может быть сформировано для поверки надлежащей работы вибрационного расходомера 5. Значение 270 затухания колебаний может быть сформировано для процесса поверки, в котором значение 270 затухания колебаний служит целью поверки надлежащей и точной работы вибрационного расходомера 5.
В одном из вариантов осуществления система хранения 204 хранит операционную программу 210. Операционная программа 210, выполняемая системой обработки 203, осуществляет управление вибрационным расходомером 5, включая колебание сборки 10 расходомера, прием последовательных сигналов первого и второго датчиков и формирование одной или более характеристик расхода на основе сигналов первого и второго датчиков. Операционная программа 210 также может выполнять и другие операции, включая, например, операции связи и операции поверки измерителя. Предполагаются и другие операции, связанные с измерителем и находящиеся в пределах объема описания и формулы изобретения.
В некоторых вариантах осуществления система хранения 204 хранит программу поверки 213. Программа поверки 213, выполняемая системой обработки 203, может выполнять процесс поверки вибрационного расходомера 5. В типовых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значения жесткости, остаточной упругости, массы, ожидаемого отклонения массы, плотности и затухания колебаний для измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение жесткости измерителя и поверять надлежащую работу вибрационного расходомера, используя значение жесткости измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение остаточной упругости измерителя и поверять надлежащую работу вибрационного расходомера, используя значение остаточной упругости измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение массы измерителя и поверять надлежащую работу вибрационного расходомера, используя значение массы измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение ожидаемого отклонения массы и поверять надлежащую работу вибрационного расходомера, используя значение ожидаемого отклонения массы измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение плотности и поверять надлежащую работу вибрационного расходомера, используя значение плотности измерителя. В некоторых вариантах осуществления система обработки 203 выполнена с возможностью формировать при выполнении программы поверки 213 значение затухания колебаний и поверять надлежащую работу вибрационного расходомера, используя значение затухания колебаний измерителя.
На фиг.4 представлен вибрационный расходомер 5 с изогнутыми расходомерными трубками 130 и 130', в котором две параллельные изогнутые расходомерные трубки 130 и 130' колеблются в режиме изгибных колебаний. С помощью пунктирных линий на чертеже показаны исходные положения двух расходомерных трубок 130 и 130'. В режиме изгибных колебаний они колеблются относительно осей изгиба W--W и W'--W'. Таким образом, расходомерные трубки 130 и 130' периодически то удаляются друг от друга (как показано изогнутыми стрелками), то сближаются. Можно видеть, что каждая расходомерная трубка 130 и 130' движется как единое целое по отношению к осям изгиба W--W и W'--W'.
На фиг.5 представлена блок-схема 500 способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения. На этапе 501 в сборке измерителя вибрационного расходомера возбуждают колебания для генерирования ответных колебаний одномодового режима. Ответные колебания одномодового режима содержат электрические сигналы, генерируемые первым и вторым тензометрическими датчиками 170L и 170R.
В некоторых вариантах осуществления одномодовый режим колебаний может включать в себя режим изгибных колебаний. Следует также понимать, что возбуждение колебаний сборки расходомера в одномодовом режиме включает в себя возбуждение колебаний одномодового режима по существу на резонансной частоте заданного режима колебаний.
На этапе 502 определяется ток одномодового режима в виде значения электрического тока, протекающего через привод. Данный ток может содержать заданное значение тока или измеренное значение тока для привода 190. Кроме того, определяются первое и второе напряжения отклика соответственно на первом и втором тензометрических датчиках 170L и 170R. Первое и второе напряжения отклика являются напряжениями отклика, генерируемыми первым и вторым тензометрическими датчиками. Первое и второе напряжения отклика одномодового режима могут содержать напряжения, генерируемые при работе на или вблизи резонансной частоты одномодового режима колебаний.
На этапе 503 генерируются амплитудно-частотные характеристики (АЧХ) для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима.
На этапе 504 полученные амплитудно-частотные характеристики аппроксимируются моделью с вычетом в полюсе, как описано в предыдущих абзацах. Частотная характеристика с вычетом в полюсе имеет вид, приведенный в уравнении 13. В качестве альтернативы может быть использована модель с вычетом в полюсе для остаточной упругости, как показано в уравнении 16.
На этапе 505 формируется значение жесткости измерителя. Значение жесткости измерителя может быть сформировано с помощью уравнения 11.
На этапе 506 производится поправка значения жесткости измерителя на плотность. Ранее, при поверке расходомера необходимости в поправке на плотность не было. Действительно, текучая среда по определению не имеет жесткости и, следовательно, не может влиять на измеряемую жесткость трубки. Однако, с использованием более новых конструкций датчиков можно обнаружить, что изменения плотности текучей среды влекут за собой изменения динамической прочности так, что измеряемая жесткость трубки действительно меняется с плотностью. Существует также возможность того, что обработка сигнала чувствительна к частоте или другим различиям в более новых конструкциях датчиков, которые также приводят к функциональной зависимости жесткости от плотности. Вне зависимости от того, что приводит к зависимости жесткости от плотности, она может быть скорректирована.
Ожидаемая жесткость может быть вычислена на основе базовой заводской жесткости, определяемой при прогоне воздуха и воды, и использоваться для нормировки измеренной жесткости с целью устранения какой-либо зависимости от плотности. Вычисление ожидаемой жесткости представлено в следующей формуле:

Нормировка на ожидаемую жесткость представлена в следующей формуле 18, где StiffnessUncertaintymeasured является измерением жесткости с поправкой на актуальную температуру при поверке измерителя. Формула (18) применяется и для левого и для правого тензометрических датчиков 170L и 170R.

На этапе 507 производится поправка значения жесткости измерителя на давление согласно следующей формуле:

Формула 19 представляет вид поправки на давление, где KP является коэффициентом компенсации жесткости для давления, а P - давлением. P может быть либо фиксированным значением, вводимым пользователем, либо измерением внешнего давления, загруженным в трансмиттер. Данное значение Р может быть тем же значением Р, которое использовалось для массового расхода и поправки на плотность. KP возможно следует определять для каждого размера датчиков. Определение KP производится непосредственно, с помощью простого измерения жесткости при двух давлениях и линейного приближения. KP будет отличаться от коэффициента давления по плотности ввиду вторичных эффектов, таких как эффект прямого давления.
На этапе 508 вновь сформированное значение жесткости измерителя сравнивается с базовой жесткостью измерителя. Если значение жесткости измерителя находится в пределах предварительно заданного диапазона жесткости, то способ переходит к этапу 509. Если значение жесткости измерителя находится за пределами заданного диапазона жесткости, то способ переходит к этапу 510.
Сравнение может включать в себя определение разности между значением жесткости измерителя и базовой жесткостью измерителя, после которого определяемая разность сравнивается с предварительно заданным диапазоном жесткости. Предварительно заданный диапазон жесткости может содержать диапазон жесткости, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон жесткости может устанавливать границу величины изменения жесткости измерителя, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования индикации отсутствия поверки.
Предварительно заданный диапазон жесткости может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон жесткости может содержать предварительно заданную область допустимых значений выше и ниже базовой жесткости измерителя. В качестве альтернативы предварительно заданный диапазон жесткости может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базовой жесткости измерителя, или с использованием других подходящих способов обработки.
На этапе 509 генерируется индикация поверки, поскольку разность между значением жесткости измерителя и базовой жесткостью измерителя находилась в пределах предварительно заданного диапазона жесткости. В связи с этим устанавливается, что жесткость измерителя существенно не изменилась. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т.п. Индикация может включать в себя сообщение пользователю о том, что базовая жесткость измерителя все еще актуальна. Индикация успешной поверки означает, что базовая жесткость измерителя все еще полезна и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 510 генерируется индикация отсутствия поверки, поскольку разность между значением жесткости измерителя и базовой жесткостью измерителя вышла за пределы предварительно заданного диапазона жесткости. В связи с этим устанавливается, что жесткость измерителя существенно изменилась. В качестве части индикации отсутствия поверки может быть сгенерирован флаг программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
На этапе 511 вычисляется разность между жесткостью измерителя на первом и втором тензометрических датчиках 170L и 170R.
На этапе 512 полученная в результате вычисления величина разности значений жесткости измерителя на первом и втором тензометрических датчиках 170L и 170R сравнивается с базовой разностью значений жесткости измерителя. Если полученная в результате вычисления величина разности значений жесткости измерителя находится в пределах предварительно заданного диапазона разности значений жесткости, то способ переходит к этапу 513. Если полученная в результате вычисления величина разности значений жесткости измерителя находится за пределами предварительно заданного диапазона разности значений жесткости, то способ переходит к этапу 514.
Сравнение может включать в себя определение разности между полученной в результате вычисления величиной разности значений жесткости измерителя и базовой разностью значений жесткости измерителя, после которого определяемая разность сравнивается с предварительно заданным диапазоном разности значений жесткости. Предварительно заданный диапазон разности значений жесткости может содержать диапазон разности значений жесткости, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон разности значений жесткости может устанавливать границу величины изменения жесткости измерителя, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования индикации отсутствия поверки.
Предварительно заданный диапазон разности значений жесткости может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон разности значений жесткости может содержать предварительно заданную область допустимых значений выше и ниже базовой разности значений жесткости измерителя. В качестве альтернативы предварительно заданный диапазон жесткости может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базовой разности значений жесткости измерителя, или с использованием других подходящих способов обработки.
На этапе 513 генерируется индикация поверки, поскольку разность между полученной в результате вычисления величиной разности значений жесткости измерителя и базовой разностью значений жесткости измерителя находилась в пределах предварительно заданного диапазона разности значений жесткости. В связи с этим устанавливается, что жесткость измерителя существенно не изменилась. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т. п. Сигнал может включать в себя сообщение пользователю о том, что базовая разность значений жесткости измерителя все еще актуальна. Индикация успешной поверки означает, что базовая разность значений жесткости измерителя все еще полезна и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 514 генерируется индикация отсутствия поверки, поскольку разность между полученной в результате вычисления величиной разности значений жесткости измерителя и базовой разностью значений жесткости измерителя вышла за пределы предварительно заданного диапазона разности значений жесткости. В связи с этим устанавливается, что жесткость измерителя существенно изменилась. В качестве части индикации отсутствия поверки может быть сгенерирован флаг программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
На фиг.6 представлена блок-схема 600 способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения. На этапе 601 в сборке измерителя вибрационного расходомера возбуждают колебания для генерирования ответных колебаний одномодового режима. Ответные колебания одномодового режима содержат электрические сигналы, генерируемые первым и вторым тензометрическими датчиками 170L и 170R.
На этапе 602 определяется ток одномодового режима в виде значения электрического тока, протекающего через привод 180. Данный ток может содержать заданное значение тока или измеренное значение тока для привода 180. Кроме того, определяются первое и второе напряжения отклика соответственно на первом и втором тензометрических датчиках 170L и 170R. Первое и второе напряжения отклика являются напряжениями отклика, генерируемыми первым и вторым тензометрическими датчиками. Первое и второе напряжения отклика одномодового режима могут содержать напряжения, генерируемые при работе на или вблизи резонансной частоты одномодового режима колебаний.
На этапе 603 генерируются амплитудно-частотные характеристики (АЧХ) для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима.
На этапе 604 полученные амплитудно-частотные характеристики аппроксимируются моделью с вычетом в полюсе для остаточной упругости, как описано в предыдущих абзацах. Частотная характеристика с вычетом в полюсе первого порядка для остаточной упругости имеет вид, приведенный в уравнении 16. Дальнейшие итерации вычисляются в соответствии с уравнениями 14-16 и связанным с ними обсуждением.
На этапе 605 значение остаточной упругости сравнивается с базовой остаточной упругостью измерителя. Если значение остаточной упругости находится в пределах предварительно заданного диапазона остаточной упругости, то способ переходит к этапу 606. Если значение остаточной упругости находится за пределами заданного диапазона остаточной упругости, то способ переходит к этапу 607.
Сравнение может включать в себя определение разности между значением остаточной упругости и базовой остаточной упругостью, после которого определяемая разность сравнивается с предварительно заданным диапазоном остаточной упругости. Предварительно заданный диапазон остаточной упругости может содержать диапазон остаточной упругости, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон остаточной упругости может устанавливать границу величины изменения остаточной упругости, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования индикации отсутствия поверки.
Предварительно заданный диапазон остаточной упругости может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон остаточной упругости может содержать предварительно заданную область допустимых значений выше и ниже базовой остаточной упругости измерителя. В качестве альтернативы предварительно заданный диапазон остаточной упругости может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базовой остаточной упругости измерителя, или с использованием других подходящих способов обработки.
На этапе 606 генерируется индикация поверки, поскольку разность между значением остаточной упругости измерителя и базовой остаточной упругостью измерителя находилась в пределах предварительно заданного диапазона остаточной упругости. В связи с этим устанавливается, что остаточная упругость измерителя существенно не изменилась. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т. п. Сигнал может включать в себя сообщение пользователю о том, что базовая остаточная упругость измерителя все еще актуальна. Индикация успешной поверки означает, что базовая остаточная упругость измерителя все еще полезна и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 607 генерируется индикация неудачной поверки, поскольку разность между значением остаточной упругости измерителя и базовой остаточной упругостью измерителя вышла за пределы предварительно заданного диапазона жесткости. В связи с этим устанавливается, что остаточная упругость измерителя существенно изменилась. В качестве части индикации отсутствия поверки может быть сгенерирован сигнал программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
На этапе 608 вычисляется разность между значениями остаточной упругости на первом и втором тензометрических датчиках 170L и 170R.
На этапе 609 полученная в результате вычисления величина разности значений остаточной упругости на первом и втором тензометрических датчиках 170L и 170R сравнивается с базовой разностью значений остаточной упругости. Если полученная в результате вычисления величина разности значений остаточной упругости находится в пределах предварительно заданного диапазона разности значений остаточной упругости, то способ переходит к этапу 610. Если полученная в результате вычисления величина разности значений остаточной упругости находится за пределами предварительно заданного диапазона разности значений остаточной упругости, то способ переходит к этапу 611.
Сравнение может включать в себя определение разности между полученной в результате вычисления величиной разности значений остаточной упругости и базовой разностью значений остаточной упругости, после которого определяемая разность сравнивается с предварительно заданным диапазоном разности значений остаточной упругости. Предварительно заданный диапазон разности значений остаточной упругости может содержать диапазон разности значений остаточной упругости, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон разности значений остаточной упругости может устанавливать границу величины изменения разности значений остаточной упругости, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования определения неудачной поверки.
Предварительно заданный диапазон разности значений остаточной упругости может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон разности значений остаточной упругости может содержать предварительно заданную область допустимых значений выше и ниже базовой разности значений остаточной упругости. В качестве альтернативы предварительно заданный диапазон разности значений остаточной упругости может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базовой разности значений остаточной упругости, или с использованием других подходящих способов обработки.
На этапе 610 генерируется индикация поверки, поскольку разность между полученной в результате вычисления величиной разности значений остаточной упругости и базовой разностью значений остаточной упругости находилась в пределах предварительно заданного диапазона разности значений остаточной упругости. В связи с этим устанавливается, что остаточная упругость измерителя существенно не изменилась. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т. п. Сигнал может включать в себя сообщение пользователю о том, что базовая разность значений остаточной упругости все еще актуальна. Индикация успешной поверки означает, что базовая разность значений остаточной упругости все еще полезна и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 611 генерируется индикация отсутствия поверки, поскольку разность между полученной в результате вычисления величиной разности значений остаточной упругости и базовой разностью значений остаточной упругости вышла за пределы предварительно заданного диапазона разности значений остаточной упругости. В связи с этим устанавливается, что разность значений остаточной упругости измерителя существенно изменилась. В качестве части индикации отсутствия поверки может быть сгенерирован сигнал программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
На фиг.7 представлена блок-схема 700 способа поверки измерителя для вибрационного расходомера в соответствии с одним из вариантов осуществления настоящего изобретения. На этапе 701 в сборке измерителя вибрационного расходомера возбуждают колебания для генерирования ответных колебаний одномодового режима. Ответные колебания одномодового режима содержат электрические сигналы, генерируемые первым и вторым тензометрическими датчиками 170L и 170R.
На этапе 702 определяется ток одномодового режима в виде значения электрического тока, протекающего через привод 180. Данный ток может содержать заданное значение тока или измеренное значение тока для привода 180. Кроме того, определяются первое и второе напряжения отклика соответственно на первом и втором тензометрических датчиках 170L и 170R. Первое и второе напряжения отклика являются напряжениями отклика, генерируемыми первым и вторым тензометрическими датчиками. Первое и второе напряжения отклика одномодового режима могут содержать напряжения, генерируемые при работе на или вблизи резонансной частоты одномодового режима колебаний.
На этапе 703 генерируются амплитудно-частотные характеристики (АЧХ) для определенных первого и второго напряжений отклика на основе определенного тока одномодового режима.
На этапе 704 полученные амплитудно-частотные характеристики аппроксимируются моделью с вычетом в полюсе, как описано в предыдущих абзацах. Частотная характеристика с вычетом в полюсе имеет вид, приведенный в уравнении 13.
На этапе 705 формируется значение массы измерителя. Значение массы измерителя может быть сформировано с помощью уравнения 10.
На этапе 706 для вычисления ожидаемого отклонения массы на первом и втором тензометрических датчиках 170L и 170R используется плотность текучей среды (как изложено в формулах 21 и 22 и в связанном с ними описании в последующих абзацах). В соответствии с аспектами плотность текучей среды может включать в себя либо измеренную плотность текучей среды, либо, в качестве альтернативы, ожидаемую плотность текучей среды, которую может вводить обслуживающий оператор.
На этапе 707 вычисленное ожидаемое отклонение массы сравнивается с базовым ожидаемым отклонением массы. Если вычисленное ожидаемое отклонение массы находится в пределах предварительно заданного диапазона ожидаемого отклонения массы, то способ переходит к этапу 708. Если вычисленное ожидаемое отклонение массы находится за пределами заданного диапазона ожидаемого отклонения массы, то способ переходит к этапу 709.
Сравнение может включать в себя определение разности между вычисленным ожидаемым отклонением массы и базовым ожидаемым отклонением массы, после которого определяемая разность сравнивается с предварительно заданным диапазоном ожидаемого отклонения массы. Предварительно заданный диапазон ожидаемого отклонения массы может содержать диапазон ожидаемого отклонения массы, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон ожидаемого отклонения массы может устанавливать границу величины изменения значения массы, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования определения неудачной поверки.
Предварительно заданный диапазон ожидаемого отклонения массы может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон ожидаемого отклонения массы может содержать предварительно заданную область допустимых значений выше и ниже базового ожидаемого отклонения массы. В качестве альтернативы предварительно заданный диапазон ожидаемого отклонения массы может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базового ожидаемого отклонения массы, или с использованием других подходящих способов обработки.
На этапе 708 генерируется индикация поверки, поскольку разность между ожидаемым отклонением массы и базовым ожидаемым отклонением массы находилась в пределах предварительно заданного диапазона ожидаемого отклонения массы. В связи с этим устанавливается, что ожидаемое отклонение массы существенно не изменилось. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т. п. Сигнал может включать в себя сообщение пользователю о том, что базовое ожидаемое отклонение массы все еще актуально. Индикация успешной поверки означает, что базовое ожидаемое отклонение массы все еще полезно и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 709 генерируется индикация отсутствия поверки, поскольку разность между ожидаемым отклонением массы и базовым ожидаемым отклонением массы вышла за пределы предварительно заданного диапазона ожидаемого отклонения массы. В связи с этим устанавливается, что ожидаемое отклонение массы существенно изменилось. В качестве части индикации отсутствия поверки может быть сгенерирован сигнал программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
На этапе 710 вычисляется разность между ожидаемым отклонением массы на первом и втором тензометрических датчиках 170L и 170R.
На этапе 711 полученная в результате вычисления разность значений ожидаемого отклонения массы на первом и втором тензометрических датчиках 170L и 170R сравнивается с базовой разностью значений ожидаемого отклонения массы. Если полученная в результате вычисления разность значений ожидаемого отклонения массы находится в пределах предварительно заданного диапазона разности значений ожидаемого отклонения массы, то способ переходит к этапу 712. Если полученная в результате вычисления разность значений ожидаемого отклонения массы находится за пределами предварительно заданного диапазона разности значений ожидаемого отклонения массы, то способ переходит к этапу 713.
Сравнение может включать в себя определение разности между полученной в результате вычисления разностью значений ожидаемого отклонения массы и базовой разностью значений ожидаемого отклонения массы, после которого определяемая разность сравнивается с предварительно заданным диапазоном разности значений ожидаемого отклонения массы. Предварительно заданный диапазон разности значений ожидаемого отклонения массы может содержать диапазон разности значений ожидаемого отклонения массы, который включает в себя, например, ожидаемые отклонения, связанные с погрешностью измерения. Предварительно заданный диапазон разности значений ожидаемого отклонения массы может устанавливать границу величины изменения значения массы, которое находится в пределах ожидаемого значения и не является достаточно существенным для генерирования индикации отсутствия поверки.
Предварительно заданный диапазон разности значений ожидаемого отклонения массы может быть определен любым способом. В одном из вариантов осуществления предварительно заданный диапазон разности значений ожидаемого отклонения массы может содержать предварительно заданную область допустимых значений выше и ниже базового ожидаемого отклонения массы. В качестве альтернативы предварительно заданный диапазон разности значений массы может быть получен из определения стандартного отклонения или доверительного уровня, который формирует границы верхнего и нижнего пределов диапазона от базовой разности значений ожидаемого отклонения массы измерителя, или с использованием других подходящих способов обработки.
На этапе 712 генерируется индикация поверки, поскольку разность между полученной в результате вычисления разностью значений ожидаемого отклонения массы и базовой разностью значений ожидаемого отклонения массы находилась в пределах предварительно заданного диапазона разности значений ожидаемого отклонения массы. В связи с этим устанавливается, что разность значений ожидаемого отклонения массы существенно не изменилась. Никаких дальнейших действий можно не предпринимать, хотя результат может быть зарегистрирован, представлен в виде отчета и т. п. Сигнал может включать в себя сообщение пользователю о том, что базовая разность значений ожидаемого отклонения массы все еще актуальна. Индикация успешной поверки означает, что базовая разность значений ожидаемого отклонения массы все еще полезна и достоверно отражает действительность и что вибрационный расходомер по-прежнему работает точно и надежно.
На этапе 713 генерируется индикация неудачной поверки, поскольку разность между полученной в результате вычисления разностью значений ожидаемого отклонения массы и базовой разностью значений ожидаемого отклонения массы вышла за пределы предварительно заданного диапазона разности значений ожидаемого отклонения массы. В связи с этим устанавливается, что разность значений ожидаемого отклонения массы измерителя существенно изменилась. В качестве части индикации отсутствия поверки может быть сгенерирован сигнал программного обеспечения, визуальный индикатор, сообщение, сигнал тревоги или другая индикация, предупреждающая пользователя о том, что расходомер не может быть приемлемо точным и надежным. Кроме того, результат может быть зарегистрирован, представлен в виде отчета и т. п.
В соответствии с типовыми вариантами осуществления, представленными на фиг.5, диагностика, использующая фактическую жесткость или разность между значениями жесткости на первом и втором тензометрических датчиках 170L и 170R, может применяться в качестве параметра поверки расходомера для обнаружения налета, коррозии, эрозии или других повреждений расходомерных трубок, а также для валидации измерений расхода и плотности.
Указанная диагностика в соответствии с одним из вариантов осуществления с преимуществом использует присущую датчикам Кориолиса симметрию. Диагностический инструмент Smart Meter Verification (SMV) в течение продолжительного периода времени отслеживает жесткость в различных местах и подтверждает ее стабильность. Если измеритель подвергается изменениям, существующие изделия ждут изменения сигнала на 4% перед оповещением обслуживающего оператора. В соответствии с типовыми вариантами осуществления изменения могут фиксироваться датчиком гораздо быстрее в сравнении с теми скоростями, которые известны в данной области техники.
Фиг.8 иллюстрирует диагностику в соответствии с типовым вариантом осуществления. На фиг.8 показан типовой график диагностики SMV, отображающий процентное изменение жесткости на левом тензометрическом датчике (LPO) и на правом тензометрическом датчике (RPO). На оси ординат отложены значения процентного изменения жесткости, а на оси абсцисс - значения счетчика прогонов. Типовой график SMV иллюстрирует базовое значение и четыре состояния коррозиии на оси абсцисс. Данные этого примера включают в себя результаты, полученые из типового расходомера как с воздухом, так и с водой в качестве технологической среды. Согласно графику SMV экспериментальные точки, отвечающие прогонам с 1 по 6, показаны с примерно нулевым процентным изменением жесткости, что свидетельствует о неизменном характере этой конкретной диагностики SMV. Однако, как показывают экспериментальные точки, отвечающие прогонам с 7 по 51, влияние на жесткость измерителя ясно отображается по мере того, как типовой расходомер постепенно корродирует.
На фиг.9 в соответствии с типовым вариантом осуществления показана диагностика, использующая в качестве параметра разность значений жесткости на левом (LPO) и правом (RPO) тензометрических датчиках. На оси ординат отложены значения разности процентных изменений жесткости, а на оси абсцисс - значения счетчика прогонов. Следует отметить, что здесь наблюдается смещение между LPO и RPO, однако данное смещение имеет весьма малую вариацию. Типовой график иллюстрирует базовое значение и четыре состояния коррозии на оси абсцисс. В согласии с фиг.8, экспериментальные точки, отвечающие прогонам с 1 по 6, показаны с примерно нулевым процентным изменением разности значений жесткости, тогда как экспериментальные точки, отвечающие прогонам с 7 по 51, ясно иллюстрируют влияние на разность значений жесткости измерителя по мере того, как типовой расходомер постепенно корродирует.
В соответствии с типовыми вариантами осуществления, представленными на фиг.6, диагностика, реализующая способ поверки измерителя, который использует вычисленную разность остаточной упругости на первом и втором тензометрических датчиках 170L и 170R, может применяться в качестве параметра поверки расходомера для обнаружения налета, коррозии, эрозии или других повреждений расходомерных трубок.
Фиг.10 иллюстрирует отдельные примеры модельных случаев для местоположений повреждений измерителя вследствие коррозии или эрозии. Равномерная коррозия, например, на расходомере F300, была смоделирована в виде равномерного изменения в стенке трубки. Эрозия на F300 была смоделирована в виде локального изменения стенки трубки в области впускного изгиба. Эрозия, например, на E300, была смоделирована в виде симметричного изменения толщины стенок на изгибах. На фиг.11 представлен график, иллюстрирующий ошибку измерения расхода из-за эрозии и/или коррозии стенок трубок, где процент ошибки калибровочного коэффициента расхода (FCF) строится в зависимости от процента эрозии и/или коррозии. Как видно из графика, очевидная ошибка измерения расхода вызвана данными изменениями стенок трубок. На фиг.12 представлен график, иллюстрирующий изменение поверочной жесткости измерителя из-за эрозии/коррозии стенок трубок. Поверочная жесткость измерителя построена в зависимости от изменения калибровочного коэффициента расхода (FCF). Как видно из графика, значительное изменение жесткости наблюдается для двух состояний F300. Таким образом, данное значительное изменение указывает на то, что в соответствии с одним из аспектов настоящего изобретения эрозия и равномерная коррозия F300 будут легко обнаружены. Однако, изменение жесткости для более симметрично эродированного Е300 составляет менее 1% для изменения FCF на 12%, что может свидетельствовать о плохой выявляемости такого состояния. На фиг.13 представлен график, иллюстрирующий изменение остаточной упругости (RF) в зависимости от изменения FCF. По изменениям остаточной упругости можно легко обнаружить эрозию F300, но выявить равномерную коррозию F300 уже труднее. Однако, можно легко обнаружить симметричную эрозию Е300. Таким образом, данные графики показывают, как сочетание остаточной упругости и поверочной жесткости измерителя позволяет надежной диагностики обнаружить эрозию и коррозию. На фиг.14 в соответствии с одним из вариантов осуществления настоящего изобретения показана диагностика, использующая разность значений остаточной упругости на первом и втором тензометрических датчиках 170L и 170R. В соответствии с фиг.14 там, где изменения стенки трубки симметричны, например, при коррозии F300 и эрозии Е300, разность значений остаточной упругости может быть весьма малой. Однако асимметричная эрозия F300 приводит к большой и существенной величине разности значений остаточной упругости.
В соответствии с типовыми вариантами осуществления настоящего изобретения простое различие в оценках массы на первом и втором тензометрических датчиках 170L и 170R может быть использовано в качестве диагностического параметра поверки расходомера для обнаружения налета, коррозии, эрозии или других повреждений расходомерных трубок.
В соответствии с типовыми вариантами осуществления, представленными на фиг.7, диагностика, использующая разность между значениями ожидаемой массы на первом и втором тензометрических датчиках 170L и 170R, может применяться в качестве параметра поверки расходомера для обнаружения налета, коррозии, эрозии или других повреждений расходомерных трубок. Кроме того, в сочетании с данными по жесткости, например, по жесткости измерителя, две диагностики могут различаться по отношению к налету и эрозии. В соответствии с аспектами настоящего изобретения данный диагностический параметр оценки значения массы использует присущую датчику Кориолиса симметрию и может быть получен на основе вышеописанных вычислений по поверке расходомера.
Фиг.15 иллюстрирует диагностику в соответствии с типовым вариантом осуществления. На фиг.15 показан типовой график диагностики SMV, отображающий процентное изменение отклонения массы на левом тензометрическом датчике (LPO) и на правом тензометрическом датчике (RPO). На оси ординат отложены значения процентного изменения отклонения массы, а на оси абсцисс - значения счетчика прогонов. Типовой график SMV иллюстрирует базовое значение и девять состояний коррозии на оси абсцисс. Данные этого примера включают в себя результаты, полученные из типового расходомера как с воздухом, так и с водой в качестве технологической среды. Согласно графику SMV экспериментальные точки, отвечающие прогонам с 1 по 6, показаны с примерно нулевым процентным изменением отклонения массы, что свидетельствует о неизменном характере этой конкретной диагностики SMV. Однако, как показывают экспериментальные точки, отвечающие прогонам с 7 по 51, влияние на отклонение массы ясно отображается по мере того, как типовой расходомер постепенно корродирует.
В вариантах осуществления плотность технологической среды может быть измерена или введена обслуживающим оператором. При использовании плотности технологической среды с оценками массы могут быть определены два дополнительных параметра обнаружения налета. В соответствии с аспектами «ожидаемая» масса вычисляется на основе базовых значений массы, определяемых при прогоне воздуха и воды, а измеряемую известную плотность технологической среды можно вычислять по следующей формуле:

Кроме того, ожидаемая масса может быть использована для вычисления нормированного отклонения массы, выраженного в процентах, по следующей формуле:

На фиг.16 в соответствии с типовым вариантом осуществления показана диагностика, использующая в качестве параметра разность значений отклонения массы на левом (LPO) и правом (RPO) тензометрических датчиках. На оси ординат отложены значения разности процентных изменений отклонения массы, а на оси абсцисс - значения счетчика прогонов. Следует отметить, что здесь наблюдается смещение между LPO и RPO, однако данное смещение имеет весьма малую вариацию. Типовой график иллюстрирует базовое значение и четыре состояния коррозии на оси абсцисс. В согласии с фиг.15, экспериментальные точки, отвечающие прогонам с 1 по 6, показаны с примерно нулевым процентным изменением разности значений отклонения массы, тогда как экспериментальные точки, отвечающие прогонам с 7 по 51, ясно иллюстрируют влияние на разность значений отклонения массы измерителя по мере того, как типовой расходомер постепенно корродирует.
В соответствии с типовыми вариантами осуществления настоящего изобретения в качестве параметра поверки расходомера может использоваться плотность с целью обнаружения налета, коррозии, эрозии или других повреждений расходомерных трубок.
Фиг.17 иллюстрирует диагностику в соответствии с типовым вариантом осуществления. На фиг.17 показан типовой график диагностики SMV, отображающий плотность для различных прогонов. На оси ординат отложены значения плотности, а на оси абсцисс - значения счетчика прогонов. Типовой график SMV для плотности иллюстрирует базовое значение, определяемое при прогоне воздуха и воды, и девять состояний коррозии на оси абсцисс. Базовое значение, определяемое при прогоне воздуха, отвечает экспериментальным точкам при прогоне 1. Базовое значение, определяемое при прогоне воды, отвечает экспериментальным точкам при прогонах 2-6. Данные этого примера включают в себя результаты, полученные из типового расходомера как с воздухом, так и с водой в качестве технологической среды. Согласно графику SMV для плотности экспериментальные точки, отвечающие прогонам 1 и 2-6, показаны с примерно нулевым процентным изменением плотности, что свидетельствует о неизменном характере этой конкретной диагностики SMV. Однако, как показывают экспериментальные точки, отвечающие прогонам с 7 по 51, влияние на плотность ясно отображается по мере того, как типовой расходомер постепенно корродирует.
Фиг.18 иллюстрирует диагностику в соответствии с типовым вариантом осуществления. На фиг.18 показан типовой график диагностики SMV, отображающий плотность для различных прогонов. На оси ординат отложены значения затухания, а на оси абсцисс - значения счетчика прогонов. Типовой график SMV для затухания иллюстрирует базовое значение, определяемое при прогоне воздуха и воды, и девять состояний коррозии на оси абсцисс. Базовое значение, определяемое при прогоне воздуха, отвечает экспериментальным точкам при прогоне 1. Базовое значение, определяемое при прогоне воды, отвечает экспериментальным точкам при прогонах 2-6. Данные этого примера включают в себя результаты, полученные из типового расходомера как с воздухом, так и с водой в качестве технологической среды. Согласно графику SMV для затухания экспериментальные точки, отвечающие прогонам 1 и 2-6, показаны с примерно нулевым процентным изменением затухания и малой вариацией относительно базового значения, что свидетельствует о неизменном характере этой конкретной диагностики SMV. Однако, как показывают экспериментальные точки, отвечающие прогонам с 7 по 51, влияние на затухание ясно отображается по мере того, как типовой расходомер постепенно корродирует.
В соответствии с аспектами настоящего изобретения с целью оповещения о налете могут быть установлены надлежащие пределы сигналов тревоги для плотности. Данные пределы сигналов тревоги могут устанавливаться динамически на основе начальной плотности. Кроме того, в соответствии с аспектом типовых вариантов осуществления этот параметр мог бы использоваться для обнаружения эрозии. В качестве примера для обслуживающих операторов, беспокоящихся об эрозии, плотность может быть отслежена, и в случае снижения показаний плотности ниже ожидаемых пределов из-за удаления материала может быть подан сигнал тревоги.
Вышеприведенное описание обеспечивает множество способов для генерирования диагностических параметров поверки измерителя для вибрационного расходомера (5). В соответствии с одним из вариантов осуществления настоящего изобретения отклонение в параметре расходомера может использоваться для генерирования диагностики, которая может выявить налет, коррозию, эрозию и/или повреждение расходомерных трубок. Каждый из способов включает в себя различные преимущества, и конкретный используемый способ может зависеть от существующих обстоятельств или доступного оборудования. Некоторые из способов позволяют обнаруживать отклонения параметров при отсутствии отклонения измерения расхода. Кроме того, более чем один способ или все вышеописанные способы могут быть включены в систему одного расходомера. Таким образом, измерительная электроника 20 может сравнивать обнаружение, полученное с помощью одного способа, с результатами, полученными на основе другого способа.
Подробные описания вышеприведенных вариантов осуществления не являются исчерпывающими описаниями всех вариантов осуществления, предполагаемых изобретателями в пределах объема настоящего изобретения. Действительно, специалистам в данной области техники должно быть понятно, что определенные элементы вышеописанных вариантов осуществления могут быть по-разному объединены или исключены для создания дополнительных вариантов осуществления, и такие дополнительные варианты осуществления находятся в пределах объема и идеи изобретения. Специалистам в данной области техники также должно быть понятно, что вышеописанные варианты осуществления изобретения могут быть объединены целиком или частично для создания дополнительных вариантов осуществления в пределах объема и идеи изобретения.
Таким образом, несмотря на то, что конкретные варианты осуществления и примеры для настоящего изобретения описаны здесь в иллюстративных целях, в пределах объема настоящего изобретения возможны различные эквивалентные модификации, как должно быть понятно специалистам в данной области техники. Представленная здесь идея изобретения может быть применена и к другим расходомерам, а не только к вариантам осуществления, описанным выше и показанным на прилагаемых чертежах. Соответственно, объем изобретения должен быть определен по следующей формуле изобретения.


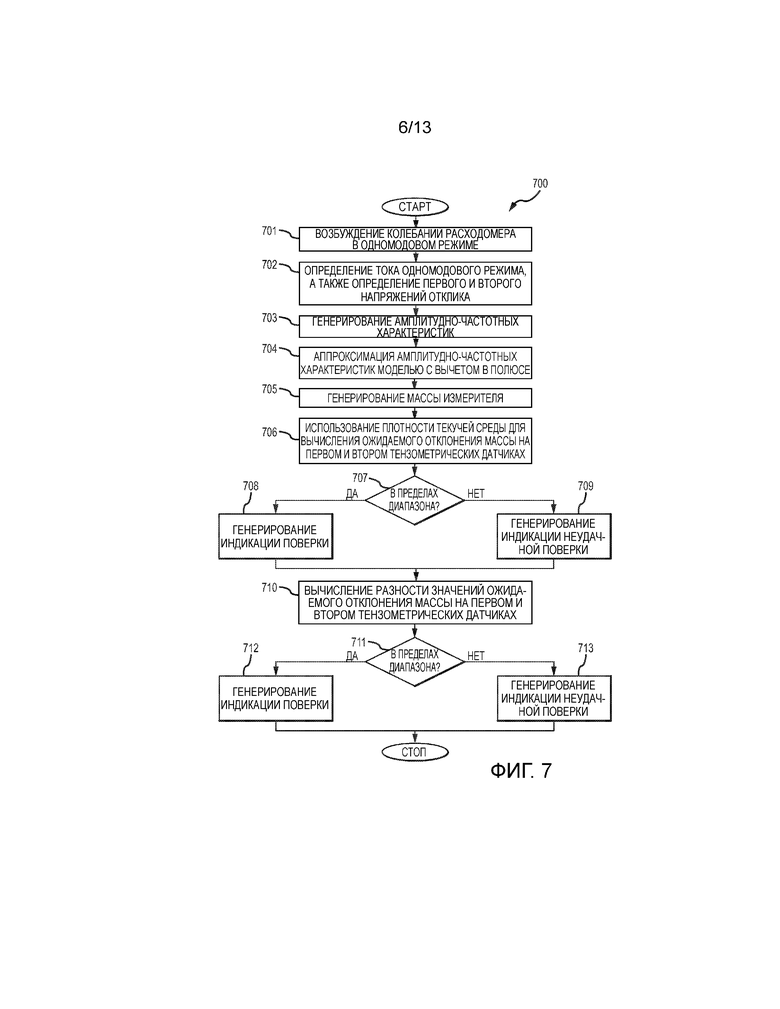


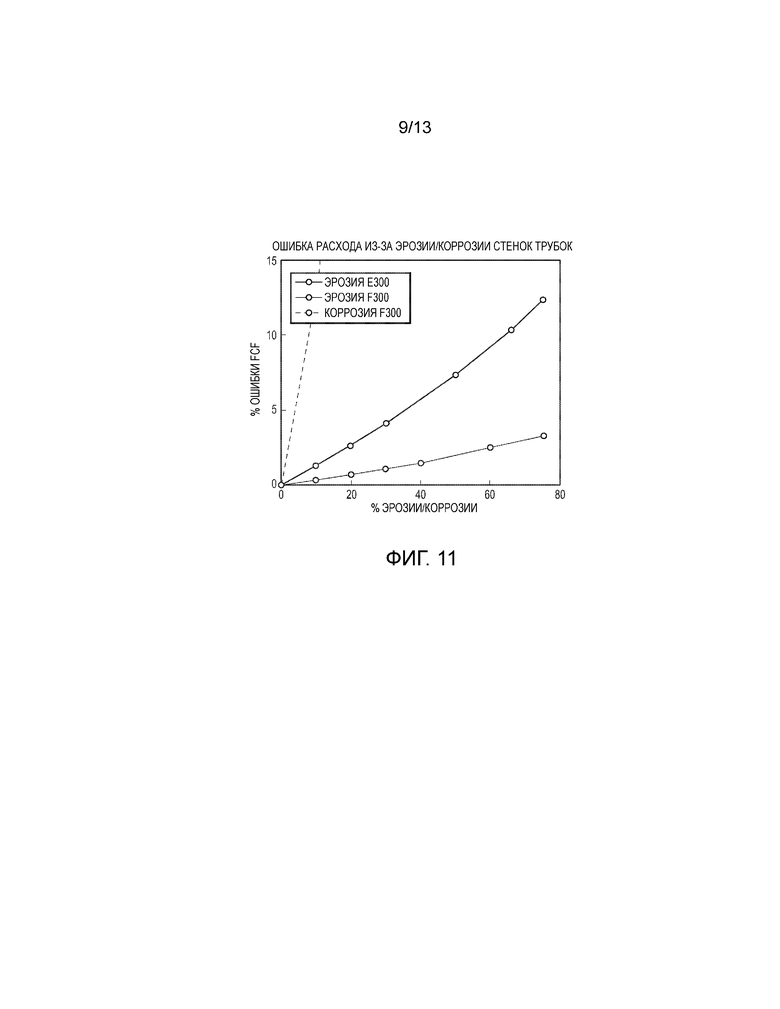
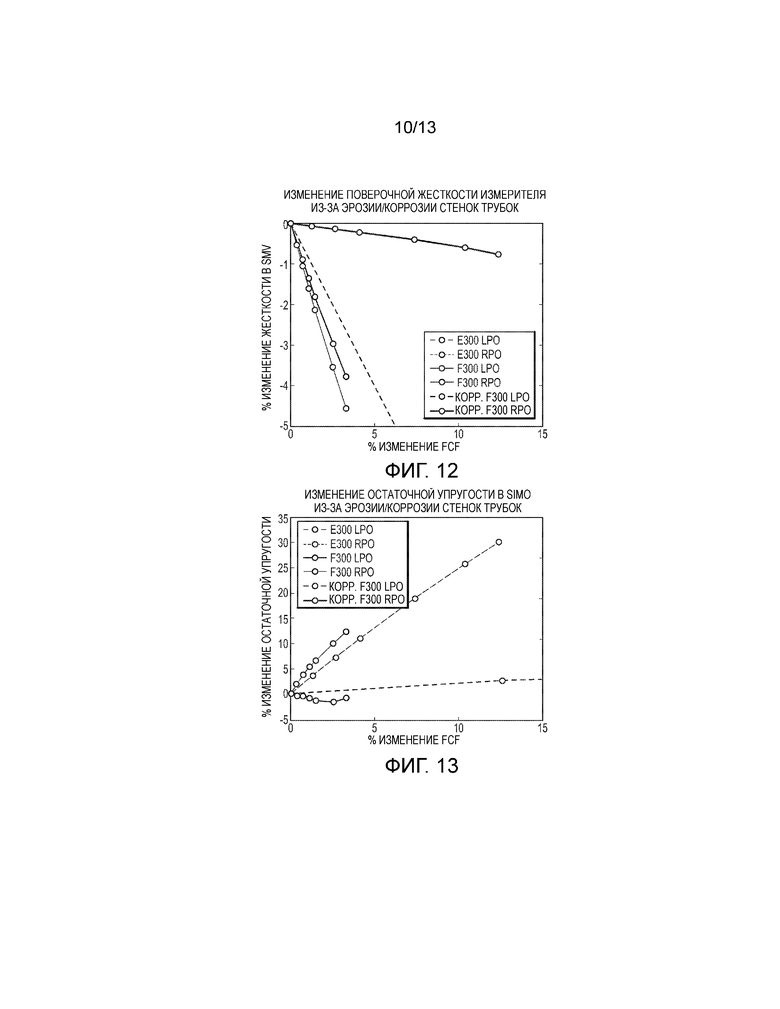
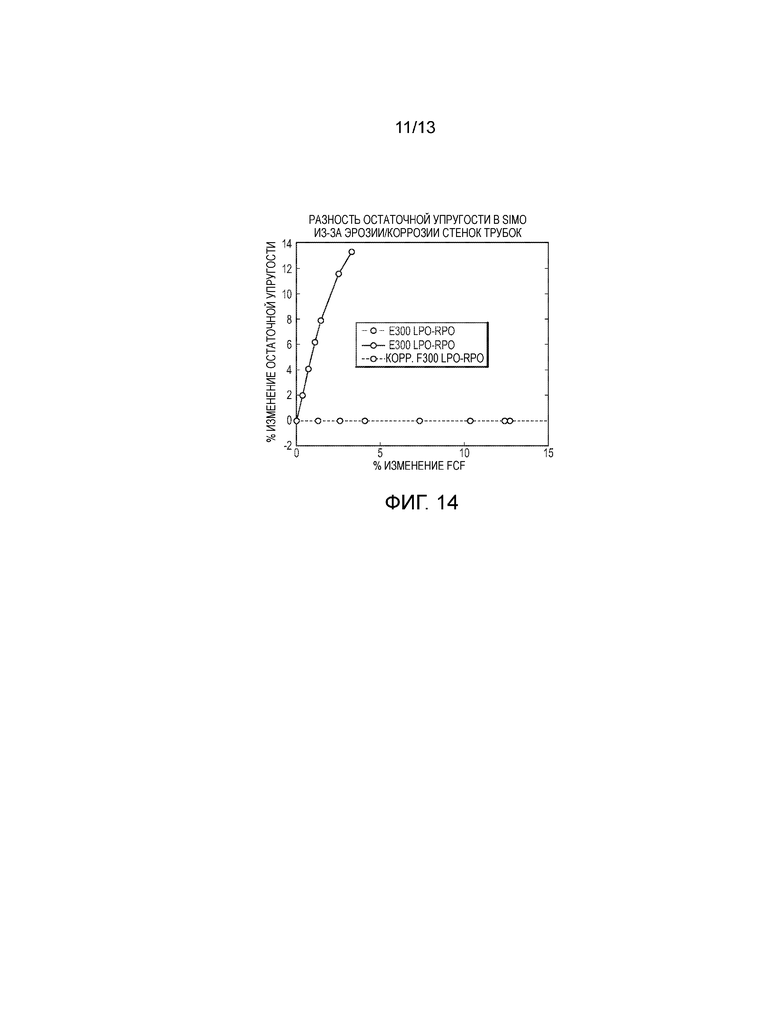
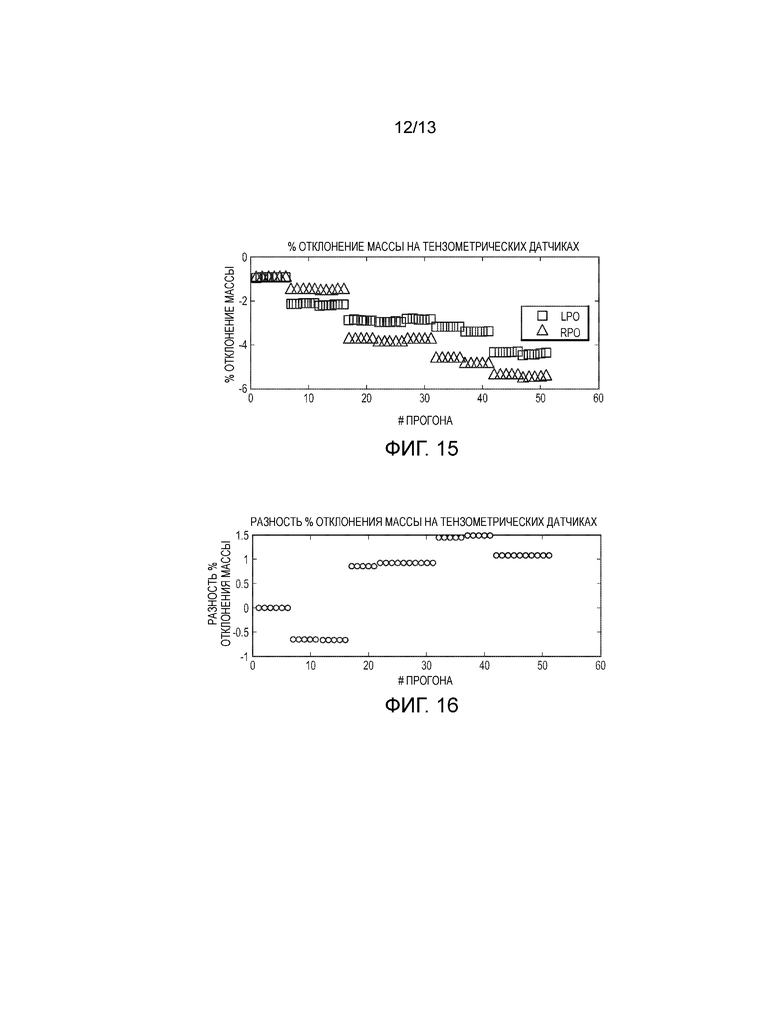

Изобретение относится к способам и диагностике для поверки измерителей в вибрационных расходомерах. Вибрационный расходомер (5) для поверки измерителя включает в себя: измерительную электронику (20), соединенную с первым и вторым тензометрическими датчиками (170L, 170R) и соединенную с приводом (180), при этом измерительная электроника (20) выполнена с возможностью: возбуждать колебания сборки (10) расходомера в одномодовом режиме с помощью привода (180), определять ток (230) одномодового режима привода (180) и определять первое и второе напряжения (231) отклика, генерируемые соответственно первым и вторым тензометрическими датчиками (170L, 170R), вычислять амплитудно-частотные характеристики для упомянутых определенных первого и второго напряжений (231) отклика на основе упомянутого определенного тока (230) одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью с вычетом в полюсе и поверять надлежащую работу вибрационного расходомера (5) с использованием значения (216) жесткости измерителя, остаточной упругости (218) и массы (240) измерителя в вариантах осуществления. Технический результат – улучшение выявления изменения калибровочного коэффициента расхода и в минимизации вероятности ложных тревог благодаря улучшенной диагностике. 6 н. и 42 з.п. ф-лы, 18 ил.
1. Вибрационный расходомер (5) для поверки измерителя, причем вибрационный расходомер (5) содержит:
сборку (10) расходомера, включающую в себя одну или более расходомерных трубок (130, 130') и первый и второй тензометрические датчики (170L, 170R);
привод (180), выполненный с возможностью возбуждать колебания одной или более расходомерных трубок (130, 130'); и
измерительную электронику (20), соединенную с первым и вторым тензометрическими датчиками (170L, 170R) и соединенную с приводом (180), при этом измерительная электроника (20) выполнена с возможностью: возбуждать колебания сборки (10) расходомера в одномодовом режиме с помощью привода (180), определять ток (230) одномодового режима привода (180) и определять первое и второе напряжения (231) отклика, генерируемые соответственно первым и вторым тензометрическими датчиками (170L, 170R), вычислять амплитудно-частотные характеристики для упомянутых определенных первого и второго напряжений (231) отклика на основе упомянутого определенного тока (230) одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для вычисления жесткости (216) измерителя и поверять надлежащую работу вибрационного расходомера (5), используя значение (216) жесткости измерителя.
2. Вибрационный расходомер по п.1, в котором значение (216) жесткости измерителя включает в себя поправку на плотность.
3. Вибрационный расходомер по п.2, в котором поправка на плотность включает в себя вычисление ожидаемой жесткости.
4. Вибрационный расходомер по п.1, в котором значение (216) жесткости измерителя включает в себя поправку на давление.
5. Вибрационный расходомер по п.1, в котором операция поверки вибрационного расходомера с использованием значения жесткости измерителя включает в себя определение разности между значением жесткости измерителя и базовой жесткостью измерителя, при этом упомянутая разность сравнивается с предварительно заданным диапазоном (219) жесткости.
6. Вибрационный расходомер по п.1, в котором измерительная электроника (20) дополнительно выполнена с возможностью сравнения значения (216) жесткости измерителя с предварительно заданным диапазоном (219) жесткости, генерирования индикации поверки вибрационного расходомера (5), если значение (216) жесткости измерителя находится в пределах предварительно заданного диапазона (219) жесткости, и генерирования индикации отсутствия поверки вибрационного расходомера (5), если значение (216) жесткости измерителя находится за пределами предварительно заданного диапазона (219) жесткости.
7. Вибрационный расходомер по п.1, в котором измерительная электроника (20) дополнительно выполнена с возможностью вычисления разности значений жесткости измерителя на первом и втором тензометрических датчиках (170L и 170R) и поверки надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений жесткости измерителя.
8. Вибрационный расходомер по п.7, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений жесткости измерителя включает в себя: определение разности между вычисленной разностью значений жесткости измерителя и базовой разностью (224) жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном (225) разности жесткости.
9. Вибрационный расходомер по п.7, в котором измерительная электроника (20) дополнительно выполнена с возможностью сравнения вычисленной разности значений жесткости измерителя с предварительно заданным диапазоном (225) разности жесткости, генерирования индикации поверки вибрационного расходомера (5), если вычисленная разность значений жесткости измерителя находится в пределах предварительно заданного диапазона (225) разности жесткости, и генерирования индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений жесткости измерителя находится за пределами предварительно заданного диапазона (225) разности жесткости.
10. Вибрационный расходомер (5) для поверки измерителя, причем вибрационный расходомер (5) содержит:
сборку (10) расходомера, включающую в себя одну или более расходомерных трубок (130, 130') и первый и второй тензометрические датчики (170L, 170R);
привод (180), выполненный с возможностью возбуждать колебания одной или более расходомерных трубок (130, 130'); и
измерительную электронику (20), соединенную с первым и вторым тензометрическими датчиками (170L, 170R) и соединенную с приводом (180), при этом измерительная электроника (20) выполнена с возможностью: возбуждать колебания сборки (10) расходомера в одномодовом режиме с помощью привода (180), определять ток (230) одномодового режима привода (180) и определять первое и второе напряжения (231) отклика, генерируемые соответственно первым и вторым тензометрическими датчиками (170L, 170R), вычислять амплитудно-частотные характеристики для упомянутых определенных первого и второго напряжений (231) отклика на основе упомянутого определенного тока (230) одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для остаточной упругости и поверять надлежащую работу вибрационного расходомера (5), используя значение (218) остаточной упругости.
11. Вибрационный расходомер по п.10, в котором операция поверки вибрационного расходомера с использованием значения остаточной упругости включает в себя определение разности между значением (218) остаточной упругости и базовой остаточной упругостью (220), при этом определяемая разность сравнивается с предварительно заданным диапазоном (221) остаточной упругости.
12. Вибрационный расходомер по п.10, в котором измерительная электроника (20) дополнительно выполнена с возможностью сравнения значения (218) остаточной упругости с предварительно заданным диапазоном (221) остаточной упругости, генерирования индикации поверки вибрационного расходомера (5), если значение (218) остаточной упругости находится в пределах предварительно заданной остаточной упругости (221), и генерирования индикации отсутствия поверки вибрационного расходомера (5), если значение (218) остаточной упругости находится за пределами предварительно заданного диапазона (221) остаточной упругости.
13. Вибрационный расходомер по п.10, в котором измерительная электроника (20) дополнительно выполнена с возможностью вычисления разности значений остаточной упругости на первом и втором тензометрических датчиках (170L и 170R) и поверки надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений остаточной упругости.
14. Вибрационный расходомер по п.13, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений остаточной упругости включает в себя: определение разности между вычисленной разностью значений остаточной упругости и базовой разностью (226) остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном (227) разности остаточной упругости.
15. Вибрационный расходомер по п.13, в котором измерительная электроника (20) дополнительно выполнена с возможностью: сравнения вычисленной разности значений остаточной упругости с предварительно заданным диапазоном (227) разности остаточной упругости, генерирования индикации поверки вибрационного расходомера (5), если вычисленное значение разности остаточной упругости находится в пределах предварительно заданного диапазона (227) разности остаточной упругости, и генерирования индикации отсутствия поверки вибрационного расходомера (5), если вычисленное значение разности остаточной упругости находится за пределами предварительно заданного диапазона (227) разности остаточной упругости.
16. Вибрационный расходомер (5) для поверки измерителя, причем вибрационный расходомер (5) содержит:
сборку (10) расходомера, включающую в себя одну или более расходомерных трубок (130, 130') и первый и второй тензометрические датчики (170L, 170R);
привод (180), выполненный с возможностью возбуждать колебания одной или более расходомерных трубок (130, 130'); и
измерительную электронику (20), соединенную с первым и вторым тензометрическими датчиками (170L, 170R) и соединенную с приводом (180), при этом измерительная электроника (20) выполнена с возможностью: возбуждать колебания сборки (10) расходомера в одномодовом режиме с помощью привода (180), определять ток (230) одномодового режима привода (180) и определять первое и второе напряжения (231) отклика, генерируемые соответственно первым и вторым тензометрическими датчиками (170L, 170R), вычислять амплитудно-частотные характеристики для упомянутых определенных первого и второго напряжений (231) отклика на основе упомянутого определенного тока (230) одномодового режима, аппроксимировать генерируемые амплитудно-частотные характеристики моделью c вычетом в полюсе для вычисления значения (240) массы измерителя и поверять надлежащую работу вибрационного расходомера (5), используя значение (240) массы измерителя.
17. Вибрационный расходомер по п.16, в котором измерительная электроника (20) дополнительно выполнена с возможностью вычисления разности значений массы измерителя на первом и втором тензометрических датчиках (170L и 170R) и поверки надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений массы измерителя.
18. Вибрационный расходомер по п.17, в котором операция поверки вибрационного расходомера, использующая вычисленную разность значений массы измерителя, включает в себя: определение разности между вычисленной разностью значений массы измерителя и базовой разностью (245) массы измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном (246) разности массы.
19. Вибрационный расходомер по п.17, в котором измерительная электроника (20) дополнительно выполнена с возможностью сравнения вычисленной разности значений массы измерителя с предварительно заданным диапазоном (246) разности массы, генерирования индикации поверки вибрационного расходомера (5), если вычисленная разность значений массы измерителя находится в пределах предварительно заданного диапазона (246) разности массы, и генерирования индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений массы измерителя находится за пределами предварительно заданного диапазона (246) разности массы.
20. Вибрационный расходомер по п.16, в котором измерительная электроника (20) дополнительно выполнена с возможностью использования плотности текучей среды для вычисления ожидаемого отклонения (250) массы на первом и втором тензометрических датчиках (170L и 170R) и поверки надлежащей работы вибрационного расходомера (5) с использованием ожидаемого отклонения (250) массы.
21. Вибрационный расходомер по п.20, в котором плотность текучей среды включает в себя по меньшей мере одну из измеренной плотности текучей среды и введенной ожидаемой плотности текучей среды.
22. Вибрационный расходомер по п.20, в котором измерительная электроника (20) дополнительно выполнена с возможностью вычисления разности значений ожидаемого отклонения массы на первом и втором тензометрических датчиках (170L и 170R) и поверки надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений ожидаемого отклонения массы.
23. Вибрационный расходомер по п.22, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений ожидаемого отклонения массы включает в себя: определение разности между вычисленной разностью значений ожидаемого отклонения массы и базовой разностью (255) ожидаемого отклонения массы, при этом определяемая разность сравнивается с предварительно заданным диапазоном (256) разности ожидаемого отклонения массы.
24. Вибрационный расходомер по п.22, в котором измерительная электроника (20) дополнительно выполнена с возможностью сравнения вычисленной разности значений ожидаемого отклонения массы с предварительно заданным диапазоном (256) разности ожидаемого отклонения массы, генерирования индикации поверки вибрационного расходомера (5), если вычисленная разность значений ожидаемого отклонения массы находится в пределах предварительно заданного диапазона (256) разности ожидаемого отклонения массы, и генерирования индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений ожидаемого отклонения массы находится за пределами предварительно заданного диапазона (256) разности ожидаемого отклонения массы.
25. Способ поверки измерителя для вибрационного расходомера, включающий в себя:
возбуждение колебаний сборки расходомера вибрационного расходомера в одномодовом режиме с помощью привода;
определение тока одномодового режима привода и определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками;
вычисление амплитудно-частотных характеристик для упомянутых определенных первого и второго напряжений отклика на основе упомянутого определенного тока одномодового режима;
аппроксимацию генерируемых амплитудно-частотных характеристик моделью c вычетом в полюсе для генерирования жесткости (216) измерителя; и
поверку надлежащей работы вибрационного расходомера (5) с использованием значения (216) жесткости измерителя.
26. Способ поверки измерителя по п.25, в котором значение (216) жесткости измерителя включает в себя поправку на плотность.
27. Способ поверки измерителя по п.26, в котором поправка на плотность включает в себя вычисление ожидаемой жесткости.
28. Способ поверки измерителя по п.26, в котором значение (216) жесткости измерителя включает в себя поправку на давление.
29. Способ поверки измерителя по п.25, в котором операция поверки вибрационного расходомера с использованием значения жесткости измерителя включает в себя определение разности между значением жесткости измерителя и базовой жесткостью измерителя, при этом разность сравнивается с предварительно заданным диапазоном (219) жесткости.
30. Способ поверки измерителя по п.25, в котором измерительная электроника (20) дополнительно содержит: сравнение значения (216) жесткости измерителя с предварительно заданным диапазоном (219) жесткости, генерирование индикации поверки вибрационного расходомера (5), если значение (216) жесткости измерителя находится в пределах предварительно заданного диапазона (219) жесткости, и генерирование индикации отсутствия поверки вибрационного расходомера (5), если значение (216) жесткости измерителя находится за пределами предварительно заданного диапазона (219) жесткости.
31. Способ поверки измерителя по п.25, в котором измерительная электроника (20) дополнительно содержит: вычисление разности значений жесткости расходомера на первом и втором тензометрических датчиках (170L и 170R) и поверку надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений жесткости измерителя.
32. Способ поверки измерителя по п.31, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений жесткости измерителя включает в себя: определение разности между вычисленной разностью значений жесткости измерителя и базовой разностью (224) жесткости измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном (225) разности жесткости.
33. Способ поверки измерителя по п.31, в котором измерительная электроника (20) дополнительно содержит: сравнение вычисленной разности значений жесткости измерителя с предварительно заданным диапазоном (225) разности жесткости, генерирование индикации поверки вибрационного расходомера (5), если вычисленная разность значений жесткости измерителя находится в пределах предварительно заданного диапазона (225) разности жесткости, и генерирование индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений жесткости измерителя находится за пределами предварительно заданного диапазона (225) разности жесткости.
34. Способ поверки измерителя для вибрационного расходомера, включающий в себя:
возбуждение колебаний сборки расходомера вибрационного расходомера в одномодовом режиме с помощью привода;
определение тока одномодового режима привода и определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками;
вычисление амплитудно-частотных характеристик для упомянутых определенных первого и второго напряжений отклика на основе упомянутого определенного тока одномодового режима;
аппроксимацию генерируемых амплитудно-частотных характеристик моделью c вычетом в полюсе для остаточной упругости; и
поверку надлежащей работы вибрационного расходомера (5) с использованием значения (218) остаточной упругости.
35. Способ поверки измерителя по п.34, в котором операция поверки вибрационного расходомера с использованием значения остаточной упругости включает в себя определение разности между значением (218) остаточной упругости и базовой остаточной упругостью (220), при этом разность сравнивается с предварительно заданным диапазоном (221) остаточной упругости.
36. Способ поверки измерителя по п.34, в котором измерительная электроника (20) дополнительно содержит: сравнение значения (218) остаточной упругости с предварительно заданным диапазоном (221) остаточной упругости, генерирование индикации поверки вибрационного расходомера (5), если значение (218) остаточной упругости находится в пределах предварительно заданной остаточной упругости (221), и генерирование индикации отсутствия поверки вибрационного расходомера (5), если значение (218) остаточной упругости находится за пределами предварительно заданного диапазона (221) остаточной упругости.
37. Способ поверки измерителя по п.34, в котором измерительная электроника (20) дополнительно содержит: вычисление разности значений остаточной упругости на первом и втором тензометрических датчиках (170L и 170R) и поверку надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений остаточной упругости.
38. Способ поверки измерителя по п.34, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений остаточной упругости включает в себя: определение разности между вычисленной разностью значений остаточной упругости и базовой разностью (226) остаточной упругости, при этом определяемая разность сравнивается с предварительно заданным диапазоном (227) разности остаточной упругости.
39. Способ поверки измерителя по п.37, в котором измерительная электроника (20) дополнительно содержит: сравнение вычисленной разности значений остаточной упругости с предварительно заданным диапазоном (227) разности остаточной упругости, генерирование индикации поверки вибрационного расходомера (5), если вычисленное значение разности остаточной упругости находится в пределах предварительно заданного диапазона (227) разности остаточной упругости, и генерирование индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений остаточной упругости находится за пределами предварительно заданного диапазона (227) разности остаточной упругости.
40. Способ поверки измерителя для вибрационного расходомера, включающий в себя:
возбуждение колебаний сборки расходомера вибрационного расходомера в одномодовом режиме с помощью привода;
определение тока одномодового режима привода и определение первого и второго напряжений отклика на одномодовый режим, генерируемых соответственно первым и вторым тензометрическими датчиками;
вычисление амплитудно-частотных характеристик для упомянутых определенных первого и второго напряжений отклика на основе упомянутого определенного тока одномодового режима;
аппроксимацию генерируемых амплитудно-частотных характеристик моделью с вычетом в полюсе для генерирования значения (240) массы измерителя; и
поверку надлежащей работы вибрационного расходомера (5) с использованием значения (240) массы измерителя.
41. Способ поверки измерителя по п.40, в котором измерительная электроника (20) дополнительно содержит: вычисление разности значений массы измерителя на первом и втором тензометрических датчиках (170L и 170R) и поверку надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений массы измерителя.
42. Способ поверки измерителя по п.41, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений массы измерителя включает в себя: определение разности между вычисленной разностью значений массы измерителя и базовой разностью (245) массы измерителя, при этом определяемая разность сравнивается с предварительно заданным диапазоном (245) разности массы.
43. Способ поверки измерителя по п.41, в котором измерительная электроника (20) дополнительно содержит: сравнение вычисленной разности значений массы измерителя с предварительно заданным диапазоном (245) разности массы, генерирование индикации поверки вибрационного расходомера (5), если вычисленная разность значений массы измерителя находится в пределах предварительно заданного диапазона (245) разности массы, и генерирование индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений массы измерителя находится за пределами предварительно заданного диапазона (245) разности массы.
44. Способ поверки измерителя по п.40, в котором измерительная электроника (20) дополнительно содержит: использование плотности текучей среды для вычисления ожидаемого отклонения (250) массы на первом и втором тензометрических датчиках (170L и 170R) и поверку надлежащей работы вибрационного расходомера (5) с использованием ожидаемого отклонения (250) массы.
45. Способ поверки измерителя по п.44, в котором плотность текучей среды включает в себя по меньшей мере одну из измеренной плотности текучей среды и введенной ожидаемой плотности текучей среды.
46. Способ поверки измерителя по п.44, в котором измерительная электроника (20) дополнительно содержит: вычисление разности значений ожидаемого отклонения массы на первом и втором тензометрических датчиках (170L и 170R) и поверку надлежащей работы вибрационного расходомера (5) с использованием вычисленной разности значений ожидаемого отклонения массы.
47. Способ поверки измерителя по п.46, в котором операция поверки вибрационного расходомера с использованием вычисленной разности значений ожидаемого отклонения массы включает в себя: определение разности между вычисленной разностью значений ожидаемого отклонения массы и базовой разностью (255) ожидаемого отклонения массы, при этом определяемая разность сравнивается с предварительно заданным диапазоном (256) разности ожидаемого отклонения массы.
48. Способ поверки измерителя по п.46, в котором измерительная электроника (20) дополнительно содержит: сравнение вычисленной разности значений ожидаемого отклонения массы с предварительно заданным диапазоном (256) разности ожидаемого отклонения массы, генерирование индикации поверки вибрационного расходомера (5), если вычисленная разность значений ожидаемого отклонения массы находится в пределах предварительно заданного диапазона (256) разности ожидаемого отклонения массы, и генерирование индикации отсутствия поверки вибрационного расходомера (5), если вычисленная разность значений ожидаемого отклонения массы находится за пределами предварительно заданного диапазона (256) разности ожидаемого отклонения массы.
| WO 2007040468 A1, 12.04.2007 | |||
| Устройство для сортировки цильпебса | 1954 |
|
SU102815A1 |
| WO 2010138117 A1, 02.12.2010 | |||
| WO 2013105933 A1, 18.07.2013 | |||
| WO 2007040542 A1, 12.04.2007.. | |||

