Уровень техники
Настоящее изобретение относится к электронному измерителю и к способам верификационной диагностики расходомера.
Датчики с вибрирующим трубопроводом, такие как массовые расходомеры Кориолиса или денситометры с колеблющейся трубкой, обычно работают посредством регистрации движения колеблющегося трубопровода, который содержит текущий материал. Свойства, связанные с материалом в трубопроводе, такие как массовый расход, плотность и т.п., могут быть определены посредством обработки измерительных сигналов, принимаемых от датчиков движения, связанных с трубопроводом. Колебательные моды колеблющейся и заполненной материалом системы в целом подвержены влиянию объединенной массы, жесткости, и демпфирующему действию самого трубопровода и содержащегося в нем материала.
Трубопровод вибрационного расходомера может включать в себя одну или несколько расходомерных трубок. Расходомерная трубка возбуждается на резонансной частоте, причем резонансная частота трубки пропорциональна плотности флюида в расходомерной трубке. Датчики, расположенные на впускной и выпускной сторонах трубки, измеряют относительную вибрацию между концами трубки. Во время потока, колеблющаяся трубка и протекающая масса связываются между собой вследствие сил Кориолиса, вызывая фазовый сдвиг колебаний между концами трубки. Фазовый сдвиг прямо пропорционален массовому расходу.
Типичный массовый расходомер Кориолиса содержит в себя один или несколько трубопроводов, которые присоединены к линии магистрального трубопровода или к другой транспортной системе и переносят материал, например, флюиды, суспензии и т.п. Каждый трубопровод может рассматриваться как имеющий множество собственных колебательных мод, включая, например, простые изгибные, крутильные, радиальные, и моды смешанного типа. В типичном применении измерения массового расхода Кориолиса трубопровод возбуждается на одной или нескольких колебательных модах, когда материал течет через трубопровод, и перемещение трубопровода измеряется в точках, разнесенных вдоль трубопровода. Возбуждение обычно обеспечивается исполнительным механизмом, например, электромеханическим устройством, таким как катушечный привод на звуковых частотах, который периодически возмущает трубопровод. Массовый расход может быть определен посредством измерения временной задержки, или разности фаз, между перемещениями в местах расположения датчиков. Два таких преобразователя (или тензометрических датчика) обычно используются для измерения колебательного отклика расходомерного трубопровода, или трубопроводов, и обычно располагаются в положениях выше по ходу и ниже по ходу относительного исполнительного механизма. Два тензометрических датчика подключаются к электронным приборам с помощью кабеля. Контрольно-измерительная аппаратура принимает сигналы от двух тензометрических датчиков и обрабатывает их для получения результата измерения массового расхода.
Разность фаз между двумя сигналами датчиков связана с массовым расходом материала, протекающего через расходомерную трубку или расходомерные трубки. Массовый расход материала пропорционален временной задержке между сигналами двух датчиков, поэтому массовый расход может быть определен посредством умножения временной задержки на Коэффициент Калибровки Расхода (FCF), причем временная задержка содержит разность фаз, деленную на частоту. Коэффициент FCF отражает свойства материала и характеристики сечения расходомерной трубки. В предшествующем уровне техники, коэффициент FCF определяется в процессе калибровки перед установкой расходомера в трубопроводную магистраль или в другой трубопровод. В процессе калибровки флюид проходит через расходомерную трубку с заданным расходом, и вычисляется соотношение между разностью фаз и расходом.
Одно из преимуществ расходомера Кориолиса заключается в том, что на точность измеряемого массового расхода не влияет износ движущихся компонентов расходомера. Расход определяется умножением разности фаз между двумя точками расходомерной трубки на коэффициент калибровки расхода. Единственные входные сигналы - это синусоидальные сигналы от датчиков, указывающие на колебания двух точек на расходомерной трубке. Разность фаз рассчитывается на основе этих синусоидальных сигналов. В колеблющейся расходомерной трубке нет движущихся компонентов. Следовательно, на измерение разности фаз и коэффициент калибровки расхода не влияет износ движущихся компонентов расходомера.
Коэффициент FCF может быть связан с характеристикой жесткости измерительной сборки. Если характеристика жесткости измерительной сборки изменится, то FCF также изменится. Поэтому изменения повлияют на точность измерений расхода, производимых расходомером. Изменения материала и характеристик поперечного сечения расходомерной трубки могут быть вызваны, например, эрозией или коррозией. Следовательно, для поддержания высокого уровня точности расходомера очень желательно иметь возможность обнаруживать и/или количественно определять любые изменения жесткости измерительной сборки.
Сущность изобретения
В соответствии с вариантом реализации предоставляется способ верификации точной работы расходомера. Способ содержит этап приема колебательного отклика от расходомера, причем колебательный отклик содержит отклик на колебание расходомера по существу на резонансной частоте. По меньшей мере, измеряется одна переменная затухания усиления. Также определяется, находится ли переменная затухания усиления за пределами заданного диапазона, и фильтр, используемый при вычислении жесткости, регулируется, если переменная затухания усиления находится за пределами заданного диапазона.
В соответствии с вариантом реализации предоставляется электронный измеритель для верификации точной работы расходомера. Электронный измеритель содержит интерфейс для приема колебательного отклика от расходомера, с колебательным откликом, содержащим отклик на колебание расходомера по существу на резонансной частоте, и систему обработки, связанную с интерфейсом. Система обработки сконфигурирована для измерения, по меньшей мере, одной переменной затухания усиления, для определения, находится ли переменная затухания усиления за пределами заданного диапазона, и для регулировки фильтрации, используемой при расчете жесткости, если переменная затухания усиления находится за пределами заданного диапазона.
Объекты
В соответствии с одним объектом, способ для верификации точной работы расходомера содержит этап приема колебательного отклика расходомера, причем колебательный отклик содержит отклик на колебание расходомера по существу на резонансной частоте. По меньшей мере, измеряется одна переменная затухания усиления. Также определяется, находится ли переменная затухания усиления за пределами заданного диапазона, и фильтр, используемый при вычислении жесткости, регулируется, если переменная затухания усиления находится за пределами заданного диапазона.
Предпочтительно, этап измерения, по меньшей мере, одной переменной затухания усиления содержит измерение, по меньшей мере, одной переменной затухания усиления в первый момент времени, измерение, по меньшей мере, одной переменной затухания усиления во второй и другой момент времени, и регулировку только фильтра, если, по меньшей мере, одно измеренное значение переменной затухания усиления в первой момент времени отличается от, по меньшей мере, одного измеренного значения переменной затухания усиления во второй момент времени.
Предпочтительно, переменные затухания усиления содержат, по меньшей мере, одно из: напряжение тензометрического датчика, управляющие токи, частоту расходомерной трубки, и температуру.
Предпочтительно, способ содержит измерение первого коэффициента наклона одной из переменных затухания усиления в течение первого периода времени, измерение второго коэффициента наклона той же одной из переменных затухания усиления в течение второго периода времени, определение того, существует ли тренд, если первый коэффициент наклона и второй коэффициент наклона одинаковы, что устраняет необходимость верификации измерителя, пока существует тренд.
Предпочтительно, вычисляется коэффициент вариации, по меньшей мере, одной переменной затухания усиления.
Предпочтительно, этап регулировки фильтрации содержит, по меньшей мере, одно из: увеличение количества событий фильтрации, типов используемых фильтров, и количество фильтруемых отсчетов.
Предпочтительно, способ содержит измерение характеристики затухания посредством устранения возбуждения расходомера, позволяя иметь затухание колебательного отклика расходомера до заданного уровня колебаний при измерении характеристики затухания, и регулировку фильтрации посредством изменения количества взятых отсчетов характеристики затухания.
В соответствии с одним объектом, электронный измеритель для верификации точной работы расходомера содержит интерфейс для приема колебательного отклика от расходомера, причем колебательный отклик содержит отклик на колебание расходомера по существу на резонансной частоте, а также систему обработки, связанную с интерфейсом. Система обработки сконфигурирована для измерения, по меньшей мере, одной переменной затухания усиления, для определения, находится ли переменная затухания усиления за пределами заданного диапазона, и для регулировки фильтрации, используемой при расчете жесткости, если переменная затухания усиления находится за пределами заданного диапазона.
Предпочтительно, измерение, по меньшей мере, одной переменной затухания усиления содержит измерение, по меньшей мере, одной переменной затухания усиления в первый момент времени и измерение, по меньшей мере, одной переменной затухания усиления во второй и другой момент времени, и регулировку фильтров, если только, по меньшей мере, одно измеренное значение переменной затухания усиления в первой момент времени отличается от, по меньшей мере, одного измеренного значения переменной затухания усиления во второй момент времени.
Предпочтительно, переменные затухания усиления содержат, по меньшей мере, одно из: напряжения тензометрического датчика, управляющие токи, частота расходомерной трубки, и температура.
Предпочтительно, система обработки дополнительно сконфигурирована для измерения первого коэффициента наклона одной из переменного затухания усиления в течение первого периода времени, и второго коэффициента наклона той же одной из переменных затухания усиления в течение второго периода времени, и для определения того, что тренд существует если первый коэффициент наклона и второй коэффициент наклона совпадают, причем верификация измерителя устраняется, пока существует тренд.
Предпочтительно вычисляется коэффициент вариации, по меньшей мере, одной переменной затухания усиления.
Предпочтительно регулировка фильтрации содержит, по меньшей мере, одно из: увеличение количества событий фильтрации, типы используемых фильтров, и количество фильтруемых отсчетов.
Предпочтительно, система обработки дополнительно сконфигурирована для измерения характеристики затухания посредством устранения возбуждения расходомера и позволяя получить затухание колебательного отклика расходомера до заданного уровня колебаний при измерении характеристики затухания, и причем регулировка фильтрации содержит изменение числа взятых отсчетов характеристики затухания.
Описание чертежей
Одно и то же цифровое обозначение представляет один и тот же элемент на всех чертежах.
Фиг.1 изображает расходомер, содержащий измерительную сборку и электронный измеритель.
Фиг.2 - электронный измеритель в соответствии с вариантом реализации.
Фиг.3 - блок-схема последовательности операций способа определения параметра (K) жесткости расходомера в соответствии с вариантом реализации.
Фиг.4 - блок-схема последовательности операций способа определения изменения жесткости (ΔK) в расходомере в соответствии с вариантом реализации.
Фиг.5 - электронный измеритель в соответствии с другим вариантом реализации.
Фиг.6 - блок-схема последовательности операций способа определения параметра жесткости (K) расходомера в соответствии с вариантом реализации.
Фиг.7 - блок-схема последовательности операций способа автоматической регулировки фильтра в соответствии с вариантом реализации.
Фиг.8 - блок-схема последовательности операций способа анализа тренда для автоматической регулировки фильтра в соответствии с вариантом реализации.
Подробное описание
Чертежи на Фиг.1-8 и нижеследующее описание демонстрируют для специалистов в данной области техники конкретные примеры того, как реализовать и использовать наилучший из вариантов реализации. Для пояснения принципов изобретения некоторые традиционные объекты были упрощены или опущены. Специалисты в данной области техники оценят варианты этих примеров, находящихся в пределах совокупности вариантов реализации. Специалисты в данной области техники поймут, что описанные ниже признаки можно комбинировать различным образом, образуя множество вариаций. Таким образом, варианты реализации не ограничиваются конкретными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
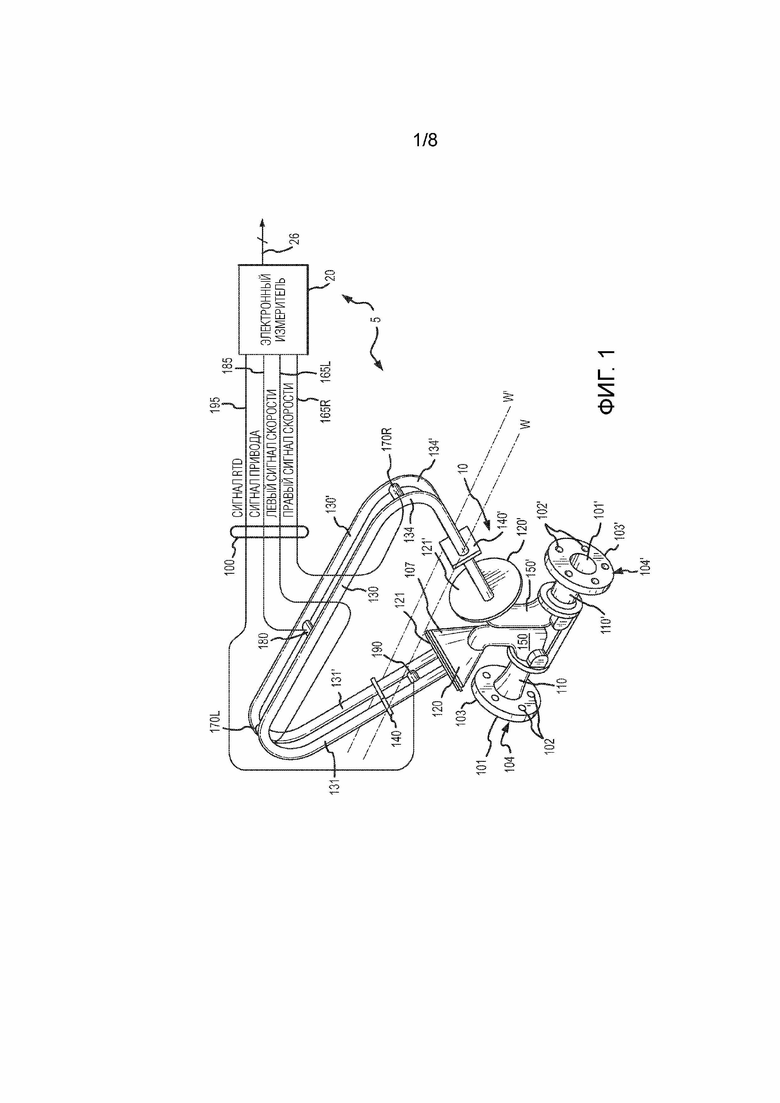
На Фиг.1 показан расходомер 5, содержащий измерительную сборку 10 и электронный измеритель 20. Измерительная сборка 10 расходомера реагирует на массовый расход и плотность технологического материала. Электронный измеритель 20 подключен к измерительной сборке 10 через кабельные соединения 100 для предоставления информации о плотности, массовом расходе и температуре по каналу 26, а также другой информации, не относящейся к настоящим вариантам реализации. Описана конструкция расходомера Кориолиса, хотя специалистам в данной области техники будет очевидно, что настоящие варианты реализации могут быть реализованы как денситометр с колеблющейся трубкой без дополнительных измерительных возможностей, обеспечиваемых массовым расходомером Кориолиса.
Измерительная сборка 10 включает в себя пару манифольдов 150 и 150', фланцы 103 и 103' с фланцевыми горловинами 110 и 110', пару параллельных расходомерных трубок 130 и 130', приводной механизм 180, датчик температуры 190 и пару датчиков скорости 170L и 170R. Расходомерные трубки 130 и 130' имеют две по существу прямые впускные ветви 131 и 131' и выпускные ветви 134 и 134', которые сходятся друг с другом в монтажных блоках 120 и 120' расходомерной трубки. Расходомерные трубки 130 и 130' изгибаются в двух симметричных местах вдоль их длины и по существу параллельно по своей длине. Стягивающий скобы 140 и 140' служат для задания осей W и W', вокруг которых колеблется каждая расходомерная трубка.
Боковые ветви 131, 131' и 134, 134' расходомерных трубок 130 и 130' жестко прикреплены к монтажным блокам 120 и 120' расходомерных трубок, а эти блоки, в свою очередь, жестко прикреплены к манифольдам 150 и 150'. Это обеспечивает непрерывный замкнутый путь материала через сборку 10 расходомера Кориолиса.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', присоединяются через впускной конец 104 и выпускной конец 104' в технологическую линию (не показана), которая переносит измеряемый технологический материал, материал входит в конец 104 измерителя через отверстие 101 во фланце 103, проходит через манифольд 150 к монтажному блоку 120 расходомерной трубки, имеющему поверхность 121. Внутри манифольда 150 материал разделяется и направляется через расходомерные трубки 130 и 130'. На выходе из расходомерных трубок 130 и 130' технологический материал повторно объединяется в единый поток внутри манифольда 150' и после этого направляется к выходному концу 104', соединенному фланцем 103', имеющим отверстия 102' для болтов, с технологической линией (не показана).
Расходомерные трубки 130 и 130' выбираются и соответствующим образом устанавливаются на монтажные блоки 120 и 120' расходомерных трубок так, чтобы иметь практически одинаковое распределение массы, моменты инерции и модуль Юнга относительно осей изгиба W-W и W'-W', соответственно. Эти изгибные оси проходят через стягивающие скобы 140 и 140'. Поскольку модуль Юнга расходомерных трубопроводов изменяется с температурой, и это изменение влияет на расчет расхода и плотности, на расходомерной трубке 130' устанавливается резистивный датчик температуры (RTD) 190 для непрерывного измерения температуры расходомерной трубки. Температура расходомерной трубки и, следовательно, напряжение, возникающее на RTD при данном токе, проходящем через него, задается температурой материала, проходящего через расходомерную трубку. Температурно-зависимое напряжение, появляющееся на RTD, используется хорошо известным способом электронным измерителем 20 для компенсации изменения модуля упругости расходомерных трубок 130 и 130' вследствие любых изменений температуры расходомерной трубки. Датчик RTD подключен к электронному измерителю 20 кабелем 195.
Обе расходомерные трубки 130 и 130' приводятся в движение приводом 180 в противоположных направлениях относительно их соответствующих осей изгиба W и W' на так называемой первой несинфазной изгибной моде расходомера. Этот приводной механизм 180 может содержать любое из многих хорошо известных устройств, таких как магнит, установленный на расходомерной трубке 130', и противостоящая катушка, установленная на расходомерной трубке 130 и через которую пропускается переменный ток для возбуждения колебаний обеих расходомерных трубок. Соответствующий управляющий сигнал подается электронным измерителем 20 по кабелю 185 на приводной механизм 180.
Электронный измеритель 20 принимает сигнал температуры RTD на кабеле 195, и левый и правый сигналы скорости появляются на кабелях 165L и 165R соответственно. Электронный измеритель 20 формирует управляющий сигнал, появляющийся на кабеле 185, для приводного механизма 180 и колеблющихся трубок 130 и 130'. Электронный измеритель 20 обрабатывает левый и правый сигналы скорости и сигнал RTD для вычисления массового расхода и плотности материала, проходящего через измерительную сборку 10. Эта информация, наряду с другой информацией, передается электронным измерителем 20 по каналу 26 на средство утилизации.
На Фиг.2 показан электронный измеритель 20 в соответствии с вариантом реализации. Электронный расходомер 20 может включать в себя интерфейс 201 и систему 203 обработки. Электронный измеритель 20 принимает колебательный отклик 210, например, от сборки 10 электронного измерителя. Электронный измеритель 20 обрабатывает колебательный отклик 210 для получения характеристики потока материала, протекающего через измерительную сборку 10. Кроме того, в электронном измерителе 20 в соответствии с вариантом реализации колебательный отклик 210 также обрабатывается для определения параметра жесткости (K) измерительной сборки 10. Кроме того, электронный измеритель 20 может обрабатывать два или более таких колебательных откликов с течением времени для регистрации изменения жесткости (ΔK) в измерительной сборке 10. Определение жесткости может производиться в условиях потока или при отсутствии потока. Определение отсутствия потока может дать преимущество в снижении уровня шума в результирующем колебательном отклике.
Как рассмотрено ранее, коэффициент калибровки расхода (FCF) отражает свойства материала и свойства сечения расходомерной трубки. Массовый расход материала, протекающего через расходомер, определяется посредством умножения измеренной временной задержки (или разности фаз/частоты) на коэффициент FCF. Коэффициент FCF может быть связан с характеристикой жесткости измерительной сборки. Если характеристика жесткости измерительной сборки изменяется, то FCF также изменяется. Следовательно, изменения жесткости расходомера влияют на точность измерений расхода, производимых расходомером.
Варианты реализации важны, поскольку они позволяют электронному измерителю 20 выполнять определение жесткости в полевых условиях без выполнения калибровочного тестирования фактического потока. Это позволяет определять жесткость без использования испытательного стенда для калибровки, другого специального оборудования или специальных флюидов. Это желательно, поскольку выполнение калибровки расхода в полевых условиях дорогостояще, сложно и требует много времени. Однако желательна более качественная и легкая верификация калибровки, поскольку жесткость измерительной сборки 10 может изменяться с течением времени при использовании. Такие изменения могут быть вызваны такими факторами, как, например, эрозия расходомерной трубки, коррозия расходомерной трубки и повреждение измерительной сборки 10.
Колебательный отклик расходомера может быть представлен моделью привода второго порядка с разомкнутым контуром, содержащей уравнение:

где f - сила, приложенная к системе, M - масса системы, C - характеристика демпфирования, а K - характеристика жесткости системы. Выражение для K содержит K=M(ω0)2, а выражение для C содержит C=M2ζω0, где ζ содержит характеристику затухания, а ω0=2πf0, где f0 - собственная/резонансная частота измерительной сборки 10 в Гц. Кроме того, x - это расстояние физического перемещения при колебании, 


Уравнение (2) можно дополнительно преобразовать в форму передаточной функции. В форме передаточной функции используется отношение смещения к силе, а именно:
Для упрощения уравнения (3) можно использовать хорошо известные магнитные уравнения. Два применимых уравнения это:

и

Напряжение датчика VEMF уравнения (4) (на тензометрическом датчике 170L или 170R) равно коэффициенту BLPO чувствительности тензометрического датчика, умноженному на скорость перемещения датчика. Коэффициент BLPO чувствительности тензометрического датчика обычно известен или измеряется для каждого тензометрического датчика. Сила (f), создаваемая приводом 180, из уравнения (5), равна коэффициенту BLDR чувствительности привода, умноженному на управляющий ток (I), подаваемый на привод 180. Коэффициент BLDR чувствительности привода 180 обычно известен или измеряется. Коэффициенты BLPO и BLDR являются функцией температуры и могут быть скорректированы посредством измерения температуры.
Подставляя магнитные уравнения (4) и (5) в передаточную функцию уравнения (3), получаем:
Если сборка 10 измерителя приводится в действие с разомкнутым контуром при резонансе, то есть на резонансной/собственной частоте ω0 (где ω0=2πf0 ), то уравнение (6) может быть переписано в виде:
Подставляя жесткость, уравнение (7) упрощается до:

Здесь параметр жесткости (K) может быть выделен, чтобы получить:

Как следствие, посредством измерения/количественной оценки характеристики затухания (ζ), наряду с управляющим напряжением (V) и управляющим током (I), можно определить параметр жесткости (K). Напряжение (V) отклика от тензометрических датчиков может быть определено по колебательному отклику вместе с управляющим током (I). Процесс определения параметра (K) жесткости рассматривается более подробно ниже в связи с Фиг.3.
При работе устройства, параметр жесткости (K) можно отслеживать во времени. Например, могут использоваться статистические методы для определения любых изменений во времени (т.е. изменения жесткости (ΔK)). Статистическое изменение параметра жесткости (K) может указывать на то, что FCF для конкретного расходомера изменился.
В вариантах реализации предоставляется параметр жесткости (K), который не зависит от сохраняемых или извлекаемых значений калибровки плотности. Это контрастирует с предшествующим уровнем техники, где известный текучий материал используется при заводской калибровке для получения стандарта плотности, который можно использовать для всех будущих операций калибровки. Варианты реализации предоставляют параметр жесткости (K), который получается исключительно из колебательных откликов расходомера. Варианты реализации обеспечивают процесс регистрации/калибровки жесткости без необходимости в процессе заводской калибровки.
Интерфейс 201 принимает колебательный отклик 210 от одного из датчиков 170L и 170R скорости через соединения 100 на Фиг.1. Интерфейс 201 может выполнять любое необходимое или желаемое преобразование сигнала, такое как любого рода форматирование, усиление, буферизация и т.д Альтернативно, преобразование сигнала частично или полностью может выполняться в системе 203 обработки. Кроме того, интерфейс 201 может обеспечить возможность связи между электронным измерителем 20 и внешними устройствами. Интерфейс 201 может поддерживать любую электронную, оптическую или беспроводную связь.
Интерфейс 201 в одном варианте реализации соединен с цифровым преобразователем (не показан), причем сигнал датчика содержит аналоговый сигнал датчика. Цифровой преобразователь производит выборку и оцифровку аналогового колебательного отклика и выдает цифровой колебательный отклик 210.
Система 203 обработки выполняет операции электронного измерителя 20 и обрабатывает измерения расхода из сборки 10 расходомера. Система 203 обработки выполняет одну или несколько процедур обработки и, тем самым, обрабатывает измерения расхода для получения одной или нескольких характеристик расхода.
Система 203 обработки может содержать универсальный компьютер, микропроцессорную систему, логическую схему или какое-либо другое универсальное или специализированное устройство обработки. Система 203 обработки может быть распределена между множеством устройств обработки. Система 203 обработки может включать в себя любой вид интегрального или независимого электронного носителя информации, такого как система 204 хранения.
Система 204 хранения может сохранять параметры и данные расходомера, программные процедуры, постоянные значения и значения переменных. В одном варианте реализации система 204 хранения включает в себя процедуры, которые выполняются системой 203 обработки, такие как процедура 230 определения жесткости, которая определяет параметр (K) жесткости расходомера 5.
Программа 230 определения жесткости в одном варианте реализации может конфигурировать систему 203 обработки для приема колебательного отклика от расходомера, при этом колебательный отклик, содержит отклик на колебание расходомера по существу на резонансной частоте, определения частоты (ω0) колебательного отклика, определения напряжения (V) отклика и управляющего тока (I) колебательного отклика, измерения характеристики затухания (ζ) расходомера и определения параметра (K) жесткости по частоте (ω0), напряжению отклика (V), управляющему току (I) и характеристики затухания (ζ) (см. Фиг.3 и соответствующее обсуждение).
Программа 230 определения жесткости в одном варианте реализации может конфигурировать систему 203 обработки для приема колебательного отклика, определения частоты, определения напряжения (V) отклика и управляющего тока (I), измерения характеристики затухания (ζ) и определения параметра (K) жесткости. Программа 230 определения жесткости в этом варианте реализации дополнительно конфигурирует систему 203 обработки для приема второго колебательного отклика от расходомера во второй момент времени t2, повторения этапов определения и измерения для второго колебательного отклика, чтобы сформировать вторую характеристику жесткости (K2), сравнения второй характеристики (K2) жесткости с параметром (K) жесткости и регистрации изменения жесткости (ΔK), если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на допуск 224 (см. Фиг.4 и соответствующее обсуждение).
В одном варианте реализации система 204 хранения хранит переменные, используемые для работы расходомера 5. Система 204 хранения в одном варианте реализации хранит такие переменные, как колебательный отклик 210, который может быть принят от датчика скорости/тензометрического датчика 170L и 170R, например.
В одном варианте реализации система 204 хранения хранит константы, коэффициенты и рабочие переменные. Например, система 204 хранения может хранить определяемую характеристику 220 жесткости и вторую характеристику 221 жесткости, которые создаются в более поздний момент времени. Система 204 хранения может хранить рабочие значения, такие как частота 212 колебательного отклика 210, напряжение 213 колебательного отклика 210 и управляющий ток 214 колебательного отклика 210. Система 204 хранения может дополнительно хранить колебательный уровень 226 и измеряемую характеристику 215 затухания расходомера 5. Кроме того, система 204 хранения может хранить константы, пороговые значения или диапазоны, такие как допуск 224. Кроме того, система 204 хранения может хранить данные, накопленные за некоторый период времени, например, изменение жесткости 228.
Чертеж на Фиг.3 представляет собой блок-схему 300 последовательности операций способа определения параметра (K) жесткости расходомера в соответствии с вариантом реализации. На этапе 301 от расходомера принимается колебательный отклик. Колебательный отклик - это отклик расходомера на колебание по существу на резонансной частоте. Колебание может быть непрерывным или прерывистым. Текущий материал может течь через сборку 10 измерителя или может быть статическим.
На этапе 302 определяется частота колебательного отклика. Частота ω0 может быть определена из колебательного отклика любым способом, процессом или оборудованием.
На этапе 303 определяется напряжение (V или VEMF) колебательного отклика вместе с управляющим током (I). Напряжение и управляющий ток могут быть получены из необработанного или из сформированного колебательного отклика.
На этапе 304 измеряется характеристика демпфирования расходомера. Демпфирующая характеристика может быть измерена, допустив затухание колебательного отклика расходомера до заданного уровня колебаний, при этом измеряя характеристику затухания. Это действие по затуханию можно осуществить различным образом. Амплитуда управляющего сигнала может быть уменьшена, привод 180 может фактически выполнять торможение измерительной сборки 10 (в соответствующих расходомерах), или привод 180 может просто отключаться от питания до тех пор, пока не будет достигнут требуемый уровень. В одном варианте реализации, заданный уровень колебаний содержит пониженный уровень уставки привода. Например, если уставка привода в данный момент составляет 3,4 мВ/Гц, то для измерения демпфирования уставка привода может быть уменьшена до более низкого значения, например, 2,5 мВ/Гц. Таким образом, электронный измеритель 20 может позволить измерительной сборке 10 просто двигаться по инерции до тех пор, пока колебательный отклик по существу не будет согласован с этим новым заданным уровнем привода.
На этапе 305 параметр жесткости (K) определяется из частоты, напряжения, управляющего тока и характеристики затухания (ζ). Параметр жесткости (K) может быть определен в соответствии с вышеприведенным уравнением (9). Помимо определения и отслеживания жесткости (K), способ также может определять и отслеживать параметр (C) демпфирования и параметр (M) массы.
Способ 300 может выполняться итеративно, периодически или случайным образом. Способ 300 может выполняться на заранее определенных ориентирах, например, в заранее определенные часы работы, при изменении потока материала и т.д.
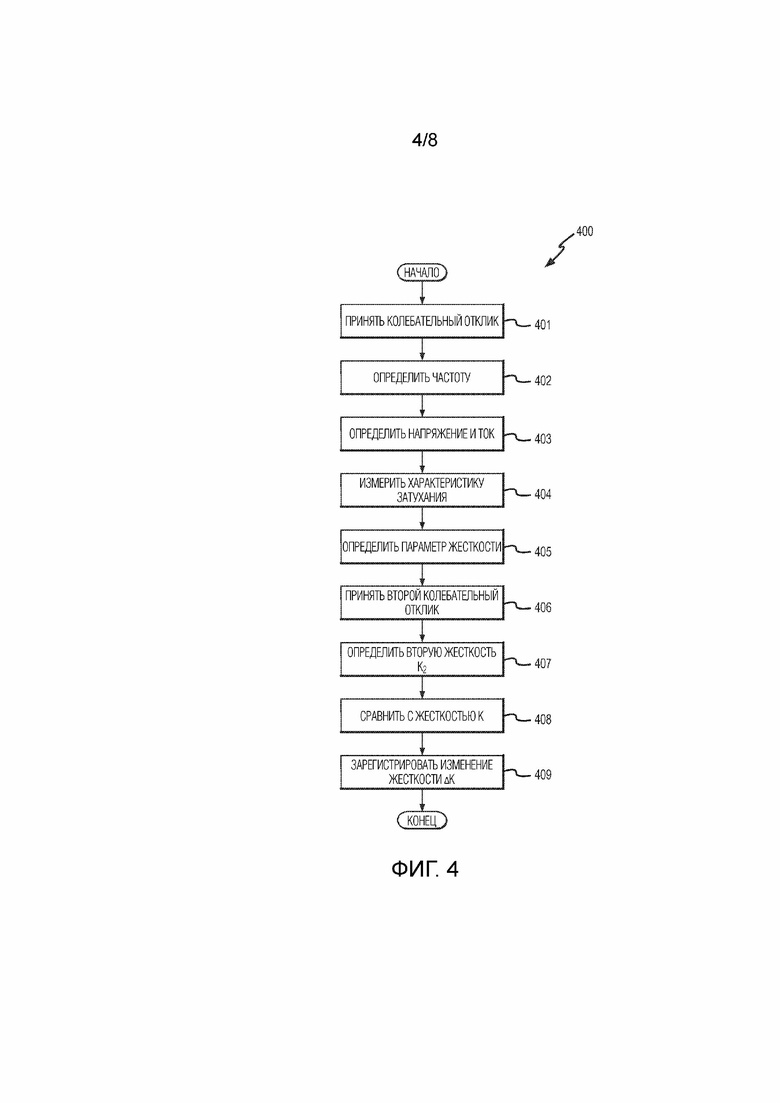
На Фиг.4 показана блок-схема 400 последовательности операций способа определения изменения жесткости (ΔK) в расходомере в соответствии с вариантом реализации. На этапе 401 колебательный отклик принимается от расходомера, как рассмотрено ранее.
На этапе 402 определяется частота колебательного отклика, как рассмотрено ранее.
На этапе 403 определяются напряжение и управляющий ток колебательного отклика, как рассмотрено ранее.
На этапе 404 измеряется характеристика затухания (ζ) расходомера, как рассмотрено ранее.
На этапе 405 параметр жесткости (K) определяется из частоты, напряжения, управляющего тока и характеристики затухания (ζ), как рассмотрено ранее.
На этапе 406 второй колебательный отклик принимается во второй момент t2 времени. Второй колебательный отклик создается вследствие колебаний измерительной сборки 10 в момент времени t2.
На этапе 407 вторая характеристика K2 жесткости создается из второго колебательного отклика. Вторая характеристика K2 жесткости может быть сформирована, например, с использованием этапов с 401 по 405.
На этапе 408 вторая характеристика K2 жесткости сравнивается с параметром (K) жесткости. Сравнение содержит сравнение характеристик жесткости, получаемых в разное время, для регистрации изменения жесткости (∆K).
На этапе 409, регистрируется любое изменение жесткости (ΔK) между K2 и K. Для определения изменения жесткости можно использовать любой статистический или математический способ определения значительного изменения жесткости. Изменение жесткости (ΔK) может быть сохранено для использования в дальнейшем и/или может быть передано в удаленное место. Кроме того, изменение жесткости (ΔK) может вызвать аварийное состояние в электронном измерителе 20. В одном варианте реализации изменение жесткости (ΔK) сначала сравнивается с допуском 224. Если изменение жесткости (ΔK) превышает допуск 224, то определяется состояние ошибки. Помимо определения и отслеживания жесткости (K), способ также может определять и отслеживать параметр (C) демпфирования и параметр (M) массы.
Способ 400 может выполняться итеративно, периодически или случайным образом. Способ 400 может выполняться на заранее определенных ориентирах, таких как заранее определенные часы работы, при изменении потока материала и т.д.
На Фиг.5 показан электронный измеритель 20 в соответствии с другим вариантом реализации. Электронный измеритель 20 в этом варианте реализации может включать в себя интерфейс 201, систему 203 обработки и систему 204 хранения, как рассмотрено ранее. Электронный измеритель 20 принимает три или более колебательных отклика 505, например, от измерительной сборки 10. Электронный измеритель 20 обрабатывает три или более колебательных отклика 505 для получения характеристики потока материала, протекающего через измерительную сборку 10. Кроме того, три или более колебательных отклика 505 также обрабатываются для определения параметра жесткости (K) измерительной сборки 10. Электронный измеритель 20 может дополнительно определять параметр (C) демпфирования и массовый параметр (M) из трех или более колебательных откликов 505. Эти параметры измерительной сборки могут использоваться для регистрации изменений в измерительной сборке 10, как рассмотрено ранее.
Система 204 хранения может хранить процедуры обработки, такие как процедура 506 обработки жесткости. Система 204 хранения может хранить принятые данные, такие как колебательные отклики 505. Система 204 хранения может сохранять предварительно запрограммированные или введенные пользователем значения, такие как допуск 516 жесткости, допуск 517 демпфирования и допуск 518 массы. Система 204 хранения может хранить рабочие значения, такие как полюс (λ) 508 и вычет (R) 509. Система 204 хранения может сохранять определенные окончательные значения, такие как жесткость (K) 510, демпфирование (C) 511 и масса (M) 512. Система 204 хранения может хранить сравнительные значения, создаваемые и действующие в течение некоторых периодов времени, такие как вторая жесткость (K2) 520, второе демпфирование (C2) 521, вторая масса (M2) 522, изменение жесткости (ΔK) 530, изменение демпфирования (ΔC) 531 и изменение массы (ΔM) 532. Изменение жесткости (ΔK) 530 может содержать изменение параметра (K) жесткости измерительной сборки 10, измеряемого в течение некоторого времени. Изменение жесткости (ΔK) 530 можно использовать для регистрации и определения физических изменений в измерительной сборке 10 с течением времени, таких как эффекты коррозии и эрозии. Кроме того, массовый параметр (M) 512 измерительной сборки 10 может быть измерен и отслежен во времени и сохранен в изменении массы (ΔM) 532, а параметр (C) демпфирования 511 может быть измерен во времени и сохранен в изменении демпфирования (ΔC) 531. Изменение массы (ΔM) 532 может указывать на наличие скопления расходуемых материалов в измерительной сборке 10, а изменение демпфирования (ΔC) 531 может указывать на изменения в расходомерной трубке, включая деградацию материала, эрозию и коррозию, растрескивание и т.д.
Во время работы электронный измеритель 20 принимает три или более колебательных отклика 505 и обрабатывает колебательные отклики 505 с использованием процедуры 506 обработки жесткости. В одном варианте реализации три или более колебательных отклика 505 содержат пять колебательных откликов 505, как будет описано ниже. Электронный измеритель 20 определяет полюс (λ) 508 и вычет (R) 509 из колебательных откликов 505. Полюс (λ) 508 и вычет (R) 509 могут содержать полюс и вычет первого порядка или могут содержать полюс второго порядка и вычет. Электронный измеритель 20 определяет параметр жесткости (K) 510, параметр (C) демпфирования 511 и массовый параметр (M) 512 из полюса (λ) 508 и вычета (R) 509. Электронный измеритель 20 может дополнительно определить вторую жесткость (K2) 520, может определить изменение жесткости (ΔK) 530 из параметра жесткости (K) 510 и второй жесткости (K2) 520, и может сравнить изменение жесткости (ΔK) 530 с допуском 516 жесткости. Если изменение 530 жесткости (ΔK) превышает допуск 516 жесткости, электронный измеритель 20 может инициировать любого рода регистрацию ошибок и/или процедуру обработки ошибок. Аналогичным образом, электронный измеритель 20 может дополнительно отслеживать параметры демпфирования и массы с течением времени и может определять и записывать второе демпфирование (C2) 521 и вторую массу (M2) 522, а также результирующее изменение демпфирования (ΔC) 531 и изменение массы (ΔM) 532. Изменение демпфирования (ΔC) 531 и изменение массы (ΔM) 532 аналогичным образом можно сравнить с допуском 517 демпфирования и допуском 518 массы.
Колебательный отклик расходомера может быть представлен моделью привода второго порядка с разомкнутым контуром, содержащей уравнение:

где f - сила, приложенная к системе, M - массовый параметр системы, C - параметр демпфирования, а K - параметр жесткости. Выражение для K содержит K=M(ω0)2, а выражение для C содержит C=M2ζω0, где ω0=2πf0 и f0 - резонансная частота измерительного сборки 10 в Гц. Выражение для ζ содержит измерение характеристики затухания, полученное из колебательного отклика, как рассмотрено ранее. Кроме того, x - это расстояние физического смещения при вибрации,

Уравнение (11) можно дополнительно преобразовать в форму передаточной функции, игнорируя начальные условия. Результат имеет вид:

Дальнейшая обработка может преобразовать уравнение (12) в форму частотной характеристики полюсного вычета первого порядка, содержащую:
где λ - полюс, R - вычет, член (j) представляет собой квадратный корень из -1, а ω - круговая частота возбуждения (в радианах в секунду).
Параметры системы, содержащие собственную/резонансную частоту (ωn), демпфированную собственную частоту (ωd) и характеристику затухания (ζ), определяются полюсом.


Параметр жесткости (K), параметр (C) демпфирования и параметр (M) массы системы могут быть получены из полюса и вычета.


Следовательно, параметр жесткости (K), массовый параметр (M) и параметр (C) демпфирования могут быть рассчитаны на основе точной оценки полюса (λ) и вычета (R).
Полюс и вычет оцениваются по измеренным частотным характеристикам. Полюс (λ) и вычет (R) можно оценить с помощью какого-либо прямого или итерационного вычислительного способа.
Отклик вблизи частоты привода состоит в основном из первого члена уравнения (13), причем комплексно-сопряженный член вносит вклад только в небольшую, почти постоянную «остаточную» часть отклика. В результате уравнение (13) можно упростить до:
В уравнении (20) выражение H(ω) представляет собой измеренную функцию частотной характеристики (FRF), полученную из трех или более колебательных откликов. В этом выводе H состоит из смещения на выходе, деленного на усилие на входе. Однако, для тензометрического датчика с катушкой на звуковых частотах, типичным для Кориолисова расходомера, измеренная FRF (то есть выражение для 

Уравнение (21) может быть далее преобразовано в форму, которая легко поддается вычислению для полюса (λ) и вычета (R).
Уравнение (22) образует переопределенную систему уравнений. Уравнение (22) может быть решено численно для определения полюса (λ) и вычета (R) из скорости/силы FRF (
В одном варианте реализации частота воздействия ω составляет 5 тонов. В этом варианте 5 тонов содержат частоту привода, 2 тона выше частоты привода и 2 тона ниже. Тоны могут быть отделены от основной частоты всего на 0,5-2 Гц. Однако частота воздействия ω может содержать больше тонов или меньше тонов, например, частота привода и 1 тон выше и ниже. Однако, 5 тонов - это хороший компромисс между точностью результата и временем обработки, необходимым для получения результата.
Следует отметить, что в предпочтительном измерении FRF измеряются две FRF для конкретной частоты привода и колебательного отклика. Одно измерение FRF получается от привода к правому тензодатчику (RPO) и одно измерение FRF получается от привода к левому тензодатчику (LPO). Такой подход называется «один вход - несколько выходов» (SIMO). Метод SIMO используется для более точной оценки полюса (λ) и вычета (R). Ранее, две FRF использовались отдельно для получения двух отдельных оценок полюса (λ) и вычета (R). Признавая, что две FRF имеют общий полюс (λ), но отдельные вычеты (RL) и (RR), эти два измерения могут быть успешно объединены, давая более надежное определение полюса и вычета.
Уравнение (23) может быть решено различным образом. В одном варианте реализации уравнение решается с помощью рекурсивного метода наименьших квадратов. В другом варианте уравнение решается с помощью псевдообратного метода. Еще в одном варианте реализации, поскольку все измерения доступны одновременно, можно использовать стандартный метод QR-разложения. Техника QR-разложения обсуждается в работе Modern Control Theory, William Brogan, copyright 1991, Prentice Hall, pp. 222-224, 168-172.
При использовании, параметр жесткости (K) вместе с параметром демпфирования (C) и параметром (M) массы можно отслеживать во времени. Например, статистические методы могут использоваться для определения любых изменений параметра жесткости (K) с течением времени (то есть, изменение жесткости (ΔK)). Статистическое изменение параметра жесткости (K) может указывать на то, что FCF для конкретного расходомера изменилась.
Варианты реализации предоставляют параметр жесткости (K), который не зависит от сохраняемых или запрашиваемых значений калибровочной плотности. Это контрастирует с предшествующим уровнем техники, где известный текучий материал используется при заводской калибровке для получения стандарта плотности, который можно использовать для всех последующих операций калибровки. Варианты реализации предоставляют параметр (K) жесткости, который получается исключительно из колебательных откликов расходомера. Варианты реализации обеспечивают процесс определения/калибровки жесткости без необходимости в заводском процессе калибровки.
На Фиг.6 показана блок-схема 600 последовательности операций способа определения параметра (K) жесткости расходомера в соответствии с вариантом реализации. На этапе 601 принимаются три или более колебательных отклика. Три или более колебательных отклика можно получить от расходомера. Три или более колебательных отклика могут включать в себя по существу основной частотный отклик и два или более неосновных частотных отклика. В одном варианте реализации принимается один тон выше основного частотного отклика и один тон ниже основного частотного отклика. В другом варианте реализации принимаются два или более тона выше основного частотного отклика и два или более тона ниже основного частотного отклика.
В одном варианте реализации тоны по существу равноудалены друг от друга выше и ниже основного частотного отклика. Альтернативно, тоны не разнесены эквидистантным образом.
На этапе 602 частотный отклик с вычетом полюса первого порядка создается из трех или более колебательных откликов. Частотный отклик с вычетом полюсов первого порядка принимает форму, приведенную в уравнении (23).
На этапе 603 массовый параметр (M) определяется из частотного отклика полюсного вычета первого порядка. Параметр (M) массы определяется посредством определения полюса первого порядка (λ) и вычета первого порядка (R) колебательных откликов. Затем, собственная частота ωn, демпфированная собственная частота ωd и характеристика затухания (ζ) определяются из полюса (λ) первого порядка и вычета (R). Впоследствии, демпфированная собственная частота ωd, вычет (R) и мнимый член (j) подставляются в уравнение (17) для получения массового параметра (M).
На этапе 604 параметр жесткости (K) определяется из решения уравнения (18). В решении используется то, что собственная частота ωn и параметр (M) массы, определенный на этапе 603, подставляются в уравнение (18) для получения параметра (K) жесткости.
На этапе 605 параметр (C) демпфирования определяется из решения уравнения (19). Решение использует характеристику затухания (ζ), собственную частоту ωn и определенный массовый параметр (M).
В вариантах реализации предоставляется способы автоматической регулировки внутренней фильтрации, используемой при вычислении жесткости, для верификации измерителя. Следует отметить, что этот способ верификации измерителя затухания усиления основан, по меньшей мере, на одном из стабильных напряжений тензодатчика, стабильного управляющего тока, стабильной частоты трубки и стабильной температуры, для расчета воспроизводимого измерения жесткости. Эти переменные будут обычно называться «переменными затухания усиления». Другие факторы, включая (но без ограничения) шум потока, шум внешней системы и тип измерителя, будут влиять на степень фильтрации, необходимую для измерений напряжения тензодатчика и управляющего тока. Например, по мере увеличения расхода, обычно больше шума будет связано с напряжениями тензодатчика и с управляющим током. Поэтому может потребоваться увеличенная выборка фильтра. Идеален баланс, поскольку избыточная фильтрация может отрицательно повлиять на количество времени, необходимое для выполнения измерения, но недостаточная фильтрация приводит к неточностям. Кроме того, неправильная фильтрация также может привести к искажению данных и потенциальным ложным сбоям.
В варианте реализации анализ выполняется, по меньшей мере, по одной из ряда переменных затухания усиления. Как отмечено выше, переменные затухания усиления могут включать в себя, по меньшей мере, одно из значений - напряжение датчика, управляющие токи, частота расходомерной трубки и температура. Анализ содержит определение стабильности, по меньшей мере, одной из переменных затухания усиления и соответствующую регулировку фильтров. На Фиг.7 представлена схема способа автоматической регулировки 700 фильтра в соответствии с вариантом реализации.
На этапе 702 измеряется, по меньшей мере, одна переменная затухания усиления для определения, считается ли измеритель зашумленным. Например, без ограничения, можно провести ряд измерений температуры в течение заданного периода времени, и можно вычислить стандартное отклонение или коэффициент вариации.
На этапе 704, если стандартное отклонение или коэффициент вариации ниже предварительно определенного порогового значения, то считается, что измеритель не шумит, и соответствующая фильтрация устанавливается на предварительно определенное минимальное значение на этапе 708.
В альтернативном варианте реализации этап 704 выполняется таким образом, что достигается альтернативное средство регулировки фильтра на основе системных требований. Может использоваться адаптивный алгоритм, состоящий из цикла, который отслеживает стандартное отклонение или коэффициент вариации переменных затухания усиления. Однако, в этом варианте реализации, если статистический анализ показывает, что переменные не находятся в пределах желаемого диапазона, фильтрация переменных затухания усиления может регулироваться до тех пор, пока переменные не окажутся в пределах желаемого диапазона. Это заменяет простую проверку того, находится ли переменная затухания усиления ниже заданного порогового значения. Этот метод позволяет как увеличивать, так и уменьшать фильтрацию в зависимости от того, находятся ли переменные выше или ниже желаемого диапазона.
Для вариантов реализации, в которых используется коэффициент вариации (CV), его можно рассчитать следующим образом:

От этапа 708, цикл формируется с этапом 702, таким образом, где уровни шума повторно проверяются, так, что статус шума регулярно опрашивается. Однако, если на этапе 704 стандартное отклонение или коэффициент вариации выше предварительно определенного порогового значения, то измеритель считается зашумленным, и затем определяется, равен ли измеренный уровень шума ранее измеренному уровню шума на этапе 706.
Если текущий уровень шума равен ранее измеренному уровню шума, то на этапе 702 формируется цикл. Однако, на этапе 706, если измеренный текущий уровень шума не равен ранее измеренному уровню шума, переменные фильтра затухания усиления регулируются на этапе 710. Такие регулировки могут включать в себя увеличение количества событий фильтрации, типов используемых фильтров и/или количества фильтруемых отсчетов. Например, фильтры простого среднего или скользящего среднего могут применяться несколько раз для оптимизации затухания. Кроме того, количество усредненных отсчетов может быть увеличено для достижения лучших характеристик. Конечно, чем большее число отсчетов будет взято, тем больше времени потребуется для завершения измерения.
По сути, после того, как был проведен анализ переменных затухания усиления для определения стабильности, можно принять решение об изменении типа фильтра или времени фильтрации. Например, если уровень шума низкий, время фильтрации может быть уменьшено до минимальных значений, чтобы сократить общее время тестирования, как показано на этапе 708. И наоборот, если шум большой, время фильтрации можно увеличить или изменить тип фильтра, чтобы получить повторяемые измерения. Тот же анализ шума может регулировать количество отсчетов характеристики затухания (дзета), чтобы также повысить точность этого измерения. Характеристика затухания считается одной из переменных, требующих наибольшего количества времени для расчета. Существует фиксированное время, которое требуется для затухания данного датчика естественным образом посредством некоторого напряжения. Это время обычно увеличивается по мере увеличения размера сенсора. Итак, имеется время, которое требуется датчику для возврата к стабильным тензометрическим напряжениям, чтобы можно было рассчитать другие переменные. Вследствие этого, обычно выполняется одно естественное затухание и имеется только одно соответствующее измерение характеристики затухания. Если в системе присутствует шум, который нарушает процессы затухания, измерение затухания будет варьироваться, что приведет к варьированию измерения жесткости.
В показанном примере опрашивается только одна переменная затухания усиления для верификации стабильности/шума измерителя. В некоторых вариантах реализации запрашивается более одной переменной затухания усиления. В некоторых вариантах реализации, если определяется, что одна, из более чем одной, опрашиваемой переменной затухания усиления указывает на шум, то фильтры настраиваются, как описано в данном документе. В некоторых вариантах реализации каждая переменная затухания усиления может быть взвешена, так что с конкретными переменными затухания усиления связываются меньшие допуски на шум.
Хотя выше в качестве примера была приведена температура, в связанных вариантах реализации может быть определена стабильность напряжения тензодатчика для выявления шума датчика. Напряжение тензодатчика - это ключевая переменная при расчете жесткости, которая используется для определения общего состояния данного измерителя. Жесткость - это измерение структурной целостности расходомерной трубки внутри датчика. Сравнивая измерения жесткости с измерениями, выполненными на заводе или при установке датчика, оператор расходомера может определить, является ли структурная целостность трубопроводов во время работы такой же, как и при первоначальной установке. Предоставленные способы определяют, когда напряжения тензодатчиков достаточно стабильны для воспроизводимых и точных измерений жесткости. Стабильные напряжения датчика являются чрезвычайно полезным показателем для определения повторяемых измерений жесткости при применении вариантов реализации для верификации измерителя затухания усиления. Если напряжения датчика изменяются, а управляющий ток и частота возбуждения постоянны, расчет жесткости будет неточным. Кроме того, ожидание в течение фиксированного времени неэффективно, поскольку время, необходимое для достижения стабильности, зависит от управляющего тока, размера датчика и шума в системе.
Посредством вычисления CV напряжения тензодатчика изменение напряжения датчика может быть связано со средним значением напряжения тензодатчика. На практике это означает, что стандартный предел CV может использоваться для ряда типов датчиков для определения стабильности. Значения, превышающие этот предел, указывают на нестабильное напряжение тензодатчика, которое может привести к неверным данным по жесткости. Для данного датчика тензометрическое напряжение может изменяться в зависимости от условий окружающей среды или процесса. В семействе датчиков, включающих в себя различные размеры, тензометрическое напряжение может отличаться еще больше из-за механических и магнитных различий между датчиками. Из-за различий в тензометрических напряжениях абсолютный предел стандартного отклонения не может использоваться для всех датчиков. Например, стандартное отклонение 50 мВ для датчика, работающего при 100 мВ, может указывать на нестабильное напряжение датчика, но такое же стандартное отклонение для датчика, работающего при 1 В, может соответствовать нормальному функционированию. Таким образом, относительное измерение, такое как CV, дает более полное представление о том, какой процент шума вносит в общее среднее тензометрическое напряжение.
Что касается различных типов датчиков, то существует бесчисленное множество моделей, размеров, конструкций, областей применения и т.д. датчиков, тензометрических напряжений, управляющих токов, частот трубок, температур и т.д., и соответствующие рабочие диапазоны и пороговые значения уровня шума будут понятны специалистам в данной области техники и могут сильно варьироваться в зависимости от самого измерителя, технологических переменных и условий окружающей среды.
Обращаясь к Фиг.8, раскрыт вариант анализа 800 тренда. Анализ тренда выполняется для тензометрического напряжения, например для определения, следует ли проводить верификацию измерителя.
На этапе 802 определяется, наступил ли подходящий момент, учитывая большое количество операций измерителя, для взятия выборки. Если да, то на этапе 804 измеряется тензометрическое напряжение.
Со временем будут измеряться и записываться множественные тензометрические напряжения, и на этапе 806 рассчитывается коэффициент наклона тензометрического напряжения. Рассматривая коэффициент наклона тензометрического напряжения от одного отсчета коэффициента наклона к другому, можно определить тренд. Для расчета используется пара данных и вычисляется коэффициент наклона.
Следующая итерация вычисляет коэффициент наклона на основе следующей пары данных, и на этапе 808 коэффициенты наклона сравниваются.
Если коэффициент наклона различны, то тренда нет, и счет тренда сбрасывается до 0 на этапе 810, и метка тренда также сбрасывается на этапе 822.
Однако на этапах 812 и 814, если знак текущего и сравниваемого коэффициента наклона напряжения одинаков, то это указывает на тренд, и на этапе 816 добавляется счетчик тренда.
Значение измерителя тренда сравнивается с заранее определенным пределом тренда на этапе 818, и если счетчик превышает окончательный предел, тренд считается обнаруженным, метка тренда устанавливается на этапе 820, и верификация измерителя должна быть прервана.
Тренд указывает на изменение данных. Поскольку на фильтрацию/усреднение полагаются, усредненные данные не точно представляют фактические данные при наличии тренда, поскольку при усреднении данные всегда оказываются одинаковыми. Если усредненные данные неверны, окончательный расчет жесткости будет неправильным, что может привести к ложным сбоям или ложным проходам. Наконец, если разница между двумя последовательными выборками среднего тензометрического напряжения превышает предел, проверку измерителя запускать не следует. Этим проверяется наличие больших изменений среднего значения для определения, следует ли запускать проверку измерителя. Этот же способ можно использовать для других переменных затухания усиления.
Подробное описание вышеупомянутых вариантов реализации не является исчерпывающим описанием всех вариантов реализации, рассматриваемых изобретателями как входящие в объем притязаний изобретения. Действительно, специалисты в данной области техники поймут, что определенные элементы описанных выше вариантов реализации могут быть по-разному объединены или исключены для создания дополнительных вариантов реализации, и такие дополнительные варианты реализации попадают в объем притязаний и принципы изобретения. Специалистам в данной области техники также будет очевидно, что описанные выше варианты реализации могут быть объединены полностью или частично для создания дополнительных вариантов реализации в пределах объема притязаний и принципов изобретения. Соответственно, объем притязаний изобретения должен определяться нижеследующей формулой изобретения.






Изобретение относится к способу автоматической регулировки внутренней фильтрации, используемой при определении жесткости, для верификации измерителя расходомера (5) и электронному измерителю (20) для автоматической регулировки внутренней фильтрации. Способ содержит следующие этапы: прием колебательного отклика от расходомера (5), причем колебательный отклик содержит отклик на колебание расходомера (5) по существу на резонансной частоте; измерение, по меньшей мере, одной переменной затухания усиления; измерение первого коэффициента наклона одной из переменных затухания усиления за первый период времени; измерение второго коэффициента наклона той же одной из переменных затухания усиления за второй период времени; определение наличия тренда, если первый и второй коэффициенты наклона совпадают; и определение того, находится ли переменная затухания усиления вне заданного диапазона; и предотвращение верификации измерителя, пока имеется тренд; регулировка фильтра, используемого при вычислении жесткости, если переменная затухания усиления выходит за пределы заданного диапазона. Технический результат – устранение ложных сбоев и ложных проходов при верификации электронного измерителя расходомера. 2 н. и 10 з.п. ф-лы, 8 ил.
1. Способ автоматической регулировки внутренней фильтрации, используемой при определении жесткости, для верификации измерителя расходомера (5), содержащий следующие этапы:
прием колебательного отклика от расходомера (5), причем колебательный отклик содержит отклик на колебание расходомера (5) по существу на резонансной частоте;
измерение, по меньшей мере, одной переменной затухания усиления;
измерение первого коэффициента наклона одной из переменных затухания усиления за первый период времени;
измерение второго коэффициента наклона той же одной из переменных затухания усиления за второй период времени;
определение наличия тренда, если первый и вторый коэффициенты наклона совпадают; и
определение того, находится ли переменная затухания усиления вне заданного диапазона; и
предотвращение верификации измерителя, пока имеется тренд;
регулировка фильтра, используемого при вычислении жесткости, если переменная затухания усиления выходит за пределы заданного диапазона.
2. Способ по п.1, причем этап измерения, по меньшей мере, одной переменной затухания усиления содержит:
измерение, по меньшей мере, одной переменной затухания усиления в первый момент времени;
измерение, по меньшей мере, одной переменной затухания усиления во второй и другой момент времени; и
причем регулировка фильтра, используемого при вычислении жесткости, если переменная затухания усиления выходит за пределы заданного диапазона, содержит регулировку фильтра, только если, по меньшей мере, одно измеренное значение переменной затухания усиления в первый момент времени отличается, по меньшей мере, от одного измеренного значения переменной затухания усиления во второй момент времени.
3. Способ по п.1, в котором переменные затухания усиления содержат, по меньшей мере, одно из: напряжение тензометрического датчика, управляющие токи, частота расходомерной трубки и температура.
4. Способ по п.1, причем коэффициент вариации (CV), по меньшей мере, одной переменной затухания усиления вычисляется.
5. Способ по п.1, причем этап регулировки фильтрации содержит, по меньшей мере, одно из: увеличение количества событий фильтрации, типы используемых фильтров и количество фильтруемых отсчетов.
6. Способ по п.1, содержащий следующие этапы:
измерение характеристики затухания (ζ) посредством удаления возбуждения расходомера (5);
обеспечение возможности затухания колебательного отклика расходомера (5) до заданного уровня колебаний при измерении характеристики затухания; и
регулировка фильтрации посредством изменения количества взятых отсчетов характеристики затухания.
7. Электронный измеритель (20) для автоматической регулировки внутренней фильтрации, используемой при определении жесткости, для верификации измерителя, причем электронный измеритель (20) содержит интерфейс (201) для приема колебательного отклика от расходомера (5), причем колебательный отклик содержит отклик на колебание расходомера (5) по существу на резонансной частоте, и систему (203) обработки, связанную с интерфейсом (201), причем электронный измеритель (20) содержит:
систему (203) обработки, сконфигурированную для измерения, по меньшей мере, одной переменной затухания усиления, определения того, находится ли переменная затухания усиления за пределами заданного диапазона, и для регулировки фильтрации, используемой при вычислении жесткости, если переменная затухания усиления находится за пределами заданного диапазона, причем система (203) обработки дополнительно сконфигурирована для измерения первого коэффициента наклона одной из переменных затухания усиления в течение первого периода времени и второго коэффициента наклона той же одной из переменных затухания усиления в течение второго периода времени, и для определения того, что тренд существует, если первый и второй коэффициенты наклона одинаковы, причем верификация измерителя устраняется, если тренд существует.
8. Электронный измеритель (20) по п.7, причем измерение, по меньшей мере, одной переменной затухания усиления содержит измерение, по меньшей мере, одной переменной затухания усиления в первый момент времени, и измерение, по меньшей мере, одной переменной затухания усиления во второй и другой момент времени, и регулировку фильтров только если, по меньшей мере, одно измеренное значение переменной затухания усиления в первый момент времени отличается от, по меньшей мере, одного измеренного значения переменной затухания усиления во второй момент времени.
9. Электронный измеритель (20) по п.7, причем переменные затухания усиления содержат, по меньшей мере, одно из: тензометрические напряжения, управляющие токи, частота расходомерной трубки и температура.
10. Электронный измеритель (20) по п.7, причем вычисляется коэффициент вариации (CV), по меньшей мере, одной переменной затухания усиления.
11. Электронный измеритель (20) по п.7, причем регулировка фильтрации содержит, по меньшей мере, одно из: увеличение количества событий фильтрации, типы используемых фильтров и количество фильтруемых отсчетов.
12. Электронный измеритель (20) по п.7, причем система (203) обработки дополнительно сконфигурирована для измерения характеристики затухания (ζ) посредством устранения возбуждения расходомера (5) и обеспечения возможности затухания колебательного отклика расходомера (5) до заданного уровня колебаний при измерении характеристики затухания, и причем регулировка фильтрации содержит изменение количества взятых отсчетов характеристики затухания.
| WO 2007040468 A1, 12.04.2007 | |||
| WO 2010014087 A1, 04.02.2010 | |||
| WO 2001007463 A1, 01.02.2001 | |||
| WO 2005050145 A1, 02.06.2005. |

