УРОВЕНЬ ТЕХНИКИ
Изобретение относится к измерительной электронике и способам для поверочной диагностики для расходомера.
Вибрационные трубопроводные датчики, такие как массовые расходомеры Кориолиса или вибрационные трубчатые плотномеры, типично работают, регистрируя перемещение вибрирующего трубопровода, который содержит в себе текучий материал. Свойства, ассоциативно связанные с материалом в трубопроводе, такие как массовый расход, плотность и тому подобное, могут определяться посредством обработки измерительных сигналов, принятых от преобразователей движения, связанных с трубопроводом. Формы колебаний вибрирующей заполненной материалом системы обычно находятся под влиянием объединенной массы, жесткости и характеристик демпфирования вмещающего трубопровода и содержащегося в нем материала.
Трубопровод вибрационного расходомера может включать в себя одну или более расходомерных трубок. Расходомерная трубка принудительно вибрирует на резонансной частоте, причем резонансная частота трубки пропорциональна плотности флюида в расходомерной трубке. Датчики, расположенные на впускной и выпускной секциях трубки, измеряют относительные колебания между концами трубки. Во время течения, вибрирующая трубка и протекающая масса соединяются вместе благодаря силам Кориолиса, вызывая фазовый сдвиг в колебаниях между концами трубки. Этот фазовый сдвиг прямо пропорционален массовому расходу.
Типичный массовый расходомер Кориолиса включает в себя один или более трубопроводов, которые соединены в линию в магистрали или транспортной системе и транспортируют материал, например, флюиды, суспензии и тому подобное, в системе. Каждый трубопровод может рассматриваться в качестве имеющего набор форм свободных колебаний, в том числе, например, формы колебаний простого изгиба, торсионную, радиальную и связанную. В типичном применении кориолисова измерения массового расхода, трубопровод возбуждается на одной или более форм колебаний, в то время как материал протекает через трубопровод, и движение трубопровода измеряется в точках, разнесенных по трубопроводу. Возбуждение типично обеспечивается исполнительным механизмом, например, электромеханическим устройством, таким как возбудитель типа звуковой катушки, который периодически возмущает трубопровод. Удельный массовый расход может определяться измерением запаздывания или разности фаз между движениями в местоположениях преобразователей. Два таких преобразователя (или датчика измерителя) типично применяются для того, чтобы измерять колебательный ответный сигнал проточного трубопровода или трубопроводов, и типично расположены в положениях выше по потоку и ниже по потоку от исполнительного механизма. Два датчика измерителя присоединены к электронной измерительной аппаратуре проводкой. Измерительная аппаратура принимает сигналы от двух датчиков измерителей и обрабатывает сигналы для того, чтобы получать результат измерения удельного массового расхода.
Разность фаз между сигналами двух датчиков является зависящей от удельного массового расхода материала, протекающего через расходомерную трубку или расходомерные трубки. Удельный массовый расход материала пропорционален запаздыванию между сигналами двух датчиков, а потому, удельный массовый расход может определяться умножением запаздывания на коэффициент калибровки расхода (FCF), где запаздывание заключает в себе разность фаз, деленную на частоту. FCF отражает свойства материала и свойства поперечного сечения расходомерной трубки. В предшествующем уровне техники, FCF определяется последовательностью операций калибровки перед установкой расходомера в магистраль или другой трубопровод. В последовательности операций калибровки, флюид пропускается через расходомерную трубку при заданном расходе, и рассчитывается пропорция между разностью фаз и расходом.
Одно из преимуществ расходомера Кориолиса состоит в том, что точность измеренного удельного массового расхода не находится под влиянием износа движущихся деталей в расходомере. Расход определяется перемножением разности фаз между двумя точками расходомерной трубки и коэффициента калибровки расхода. Единственными входными сигналами являются синусоидальные сигналы из датчиков, показывающие колебательное перемещение двух точек на расходомерной трубке. Разность фаз рассчитывается по этим синусоидальным сигналам. В вибрирующей расходомерной трубке нет движущихся деталей. Поэтому, измерение разности фаз и коэффициента калибровки расхода не находится под влиянием износа движущихся деталей в расходомере.
FCF может зависеть от характеристики жесткости измерительной сборки. Если характеристика жесткости измерительной сборки изменяется, то FCF также будет изменяться. Поэтому, изменения будут наносить вред точности измерений параметров потока, сформированных расходомером. Изменения в свойствах материала или поперечного сечения расходомерной трубки, например, могут вызываться эрозией или коррозией. Следовательно, крайне желательно иметь возможность регистрировать и/или количественно определять любые изменения в отношении жесткости измерительной сборки, для того чтобы поддерживать высокий уровень точности в расходомере.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предложена измерительная электроника для расходомера согласно варианту осуществления изобретения. Измерительная электроника содержит интерфейс для приема колебательного ответного сигнала от расходомера и систему обработки данных, связанную с интерфейсом. Колебательный ответный сигнал заключает в себе ответный сигнал на вибрацию расходомера на по существу резонансной частоте. Система обработки данных сконфигурирована для приема колебательного ответного сигнала от интерфейса, определения частоты (ω0) колебательного ответного сигнала, определения напряжения (V) ответного сигнала и тока (I) возбуждения колебательного ответного сигнала, измерения характеристики (ζ) затухания расходомера и определения параметра (K) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ζ) затухания.
Согласно варианту осуществления изобретения, предложен способ определения параметра (K) жесткости расходомера. Способ содержит этап, на котором принимают колебательный ответный сигнала от расходомера. Колебательный ответный сигнал включает в себя ответный сигнал на вибрацию расходомера по существу на резонансной частоте. Способ дополнительно содержит этапы, на которых определяют частоту (ω0) колебательного ответного сигнала, определяют напряжение (V) ответного сигнала и тока (I) возбуждения колебательного ответного сигнала, и измеряют характеристики (ζ) затухания расходомера. Способ дополнительно содержит этап, на котором определяют параметр (K) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ζ) затухания.
Согласно варианту осуществления изобретения, предложен способ определения изменения (ΔK) жесткости в расходомере. Способ содержит этапы, на которых принимают колебательный ответный сигнал от расходомера. Колебательный ответный сигнал включает в себя ответный сигнал на вибрацию расходомера на по существу резонансной частоте. Способ дополнительно содержит этапы, на которых определяют частоту (ω0) колебательного ответного сигнала, определяют напряжение (V) ответного сигнала и тока (I) возбуждения колебательного ответного сигнала, и измеряют характеристики (ζ) затухания расходомера. Способ дополнительно содержит определение параметра (K) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ζ) затухания. Способ дополнительно содержит этапы, на которых принимают второй колебательный ответный сигнал от расходомера во второй момент t2 времени, генерируют вторую характеристику (K2) жесткости по второму колебательному ответному сигналу, сравнивают вторую характеристику (K2) жесткости с параметром (K) жесткости и регистрируют изменение (ΔK) жесткости, если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на предопределенный допуск.
Предложена измерительная электроника для расходомера согласно варианту осуществления изобретения. Измерительная электроника содержит интерфейс для приема трех или более колебательных ответных сигналов из расходомера. Три или более колебательных ответных сигналов включают в себя колебательный ответный сигнал по существу основной частоты и два или более колебательных ответных сигнала неосновных частот. Измерительная электроника дополнительно содержит систему обработки данных, связанную с интерфейсом и сконфигурированную для приема трех или более колебательных ответных сигналов от интерфейса, формирования амплитудно-частотной характеристики с вычетом в полюсе по трем или более колебательным ответным сигналам, и определения, по меньшей мере, параметра (K) жесткости по амплитудно-частотной характеристике с вычетом в полюсе.
Согласно варианту осуществления изобретения, предложен способ определения параметра (K) жесткости расходомера. Способ содержит этап, на котором принимают три или более колебательных ответных сигнала. Три или более колебательных ответных сигнала включают в себя колебательный ответный сигнал по существу основной частоты и два или более колебательных ответных сигнала неосновных частот. Способ дополнительно содержит этап, на котором генерируют амплитудно-частотную характеристику с вычетом в полюсе из трех или более колебательных ответных сигналов и определяют, по меньшей мере, параметр (K) жесткости по амплитудно-частотной характеристике с вычетом в полюсе.
Согласно варианту осуществления изобретения, предложен способ определения параметра (K) жесткости расходомера. Способ содержит этапы, на которых принимают три или более колебательных ответных сигнала. Три или более колебательных ответных сигнала включают в себя колебательный ответный сигнал по существу основной частоты и два или более колебательных ответных сигнала неосновных частот. Способ дополнительно содержит этап, на котором генерируют амплитудно-частотную характеристику с вычетом в полюсе из трех или более колебательных ответных сигналов и определяют, по меньшей мере, параметр (K) жесткости по амплитудно-частотной характеристике с вычетом в полюсе. Способ дополнительно содержит этапы, на которых принимают второй набор из трех или более колебательных ответных сигналов от расходомера во второй момент t2 времени, генерируют вторую характеристику (K2) жесткости по второму набору из трех или более колебательных ответных сигналов, сравнивают вторую характеристику (K2) жесткости с параметром (K) жесткости и регистрируют изменения (ΔK) жесткости, если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на предопределенный допуск.
АСПЕКТЫ ИЗОБРЕТЕНИЯ
В одном из аспектов измерительной электроники, измерение характеристики (ζ) затухания дополнительно содержит предоставление колебательному ответному сигналу расходомера возможности затухать вплоть до предопределенной базы отсчета колебаний.
В еще одном аспекте измерительной электроники, система обработки данных дополнительно сконфигурирована для измерения характеристики (ζ) затухания снятием возбуждения расходомера и предоставлением колебательному ответному сигналу расходомера возможности затухать вплоть до предопределенной базы отсчета колебаний наряду с измерением характеристики затухания.
В еще одном аспекте измерительной электроники, параметр (K) жесткости является K=(I·BLPO·BLDR·ω0)/2ζV.
В одном из аспектов способа, измерение характеристики (ζ) затухания дополнительно содержит предоставление колебательному ответному сигналу расходомера возможности затухать вплоть до предопределенной базы отсчета колебаний.
В еще одном аспекте способа, измерение характеристики (ζ) затухания дополнительно содержит снятие возбуждения расходомера и предоставление колебательному ответному сигналу расходомера возможности затухать вплоть до предопределенной базы отсчета колебаний наряду с измерением характеристики затухания.
В еще одном аспекте способа, параметр (K) жесткости является K=(I·BLPO·BLDR·ω0)/2ζV.
В еще одном аспекте способа, генерирование второй характеристики (K2) жесткости по второму колебательному ответному сигналу содержит генерирование второй характеристики (K2) жесткости по второй частоте, второму напряжению ответного сигнала, второму току возбуждения и второй характеристике демпфирования.
В еще одном аспекте способа, способ дополнительно содержит регистрирование изменения (ΔK) жесткости, если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на предопределенный допуск по жесткости.
В еще одном аспекте способа, способ дополнительно содержит количественное определение изменения (ΔK) жесткости из сравнения K и K2.
В одном из вариантов осуществления измерительной электроники, система обработки данных дополнительно сконфигурирована для определения параметра (C) демпфирования по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления измерительной электроники, система обработки данных дополнительно сконфигурирована для определения параметра (M) массы по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления измерительной электроники, система обработки данных дополнительно сконфигурирована для вычисления полюса (λ), левого вычета (RL) и правого вычета (RR) по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления измерительной электроники, три или более колебательных ответных сигнала содержат по меньшей мере один тон выше ответного сигнала основной часты и по меньшей мере один тон ниже ответного сигнала основной частоты.
В еще одном варианте осуществления измерительной электроники, три или более колебательных ответных сигнала содержат по меньшей мере два тона выше ответного сигнала основной частоты и, по меньшей мере, два тона ниже ответного сигнала основной частоты.
В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка.
В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, которая является 
В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, которая является  и при этом, параметр (K) жесткости, параметр (C) демпфирования и параметр (M) массы определяются согласно уравнениям M=1/2jRωd, K=(ωn)2M и C=2ζωnM.
и при этом, параметр (K) жесткости, параметр (C) демпфирования и параметр (M) массы определяются согласно уравнениям M=1/2jRωd, K=(ωn)2M и C=2ζωnM.
В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка.
В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является

В еще одном варианте осуществления измерительной электроники, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является  и при этом, параметр (K) жесткости определяется согласно
и при этом, параметр (K) жесткости определяется согласно  параметр (M) массы определяется согласно M=K/(ωn)2, и параметр (C) демпфирования определяется согласно
параметр (M) массы определяется согласно M=K/(ωn)2, и параметр (C) демпфирования определяется согласно 
В одном из вариантов осуществления способа, этап определения дополнительно содержит определение параметра (C) демпфирования по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления способа, этап определения дополнительно содержит этап, на котором определяют параметр (M) массы по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления способа, этап определения дополнительно содержит этап, на котором вычисляют полюса (λ), левого вычета (RL) и правого вычета (RR) по амплитудно-частотной характеристике с вычетом в полюсе.
В еще одном варианте осуществления способа, три или более колебательных ответных сигнала содержат, по меньшей мере, один тон выше ответного сигнала основной частоты и по меньшей мере один тон ниже ответного сигнала основной частоты.
В еще одном варианте осуществления способа, три или более колебательных ответных сигналов содержат, по меньшей мере, два тона выше ответного сигнала основной частоты и по меньшей мере два тона ниже ответного сигнала основной частоты.
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка.
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся 
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся  и при этом, параметр (K) жесткости, параметр (C) демпфирования и параметр (M) массы определяются согласно уравнениям M=1/2jRωd, K=(ωn)2M и C=2ζωnM.
и при этом, параметр (K) жесткости, параметр (C) демпфирования и параметр (M) массы определяются согласно уравнениям M=1/2jRωd, K=(ωn)2M и C=2ζωnM.
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка.
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, являющуюся 
В еще одном варианте осуществления способа, амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является  и при этом, параметр (K) жесткости определяется согласно
и при этом, параметр (K) жесткости определяется согласно  параметр (M) массы определяется согласно M=K/(ωn)2, и параметр (C) демпфирования определяется согласно
параметр (M) массы определяется согласно M=K/(ωn)2, и параметр (C) демпфирования определяется согласно 
В еще одном варианте осуществления способа, способ дополнительно содержит регистрирование изменения (ΔK) жесткости, если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на предопределенный допуск по жесткости.
В еще одном варианте осуществления, способ дополнительно содержит этап, на котором определяют количественное изменение (ΔK) жесткости из сравнения K и K2.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Один и тот же номер позиции на чертежах представляет идентичный элемент на всех чертежах.
На Фиг.1 показан расходомер, содержащий измерительную сборку и измерительную электронику.
На Фиг.2 показана измерительная электроника согласно варианту осуществления изобретения.
Фиг.3 - блок-схема последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения.
Фиг.4 - блок-схема последовательности операций способа для определения изменения (ΔK) жесткости в расходомере согласно варианту осуществления изобретения.
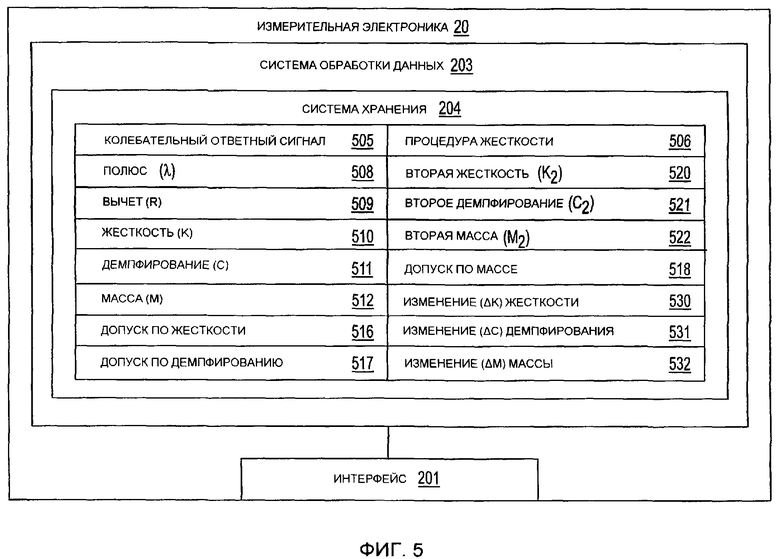
На Фиг.5 показана измерительная электроника согласно еще одному варианту осуществления изобретения.
Фиг.6 - блок-схема последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения.
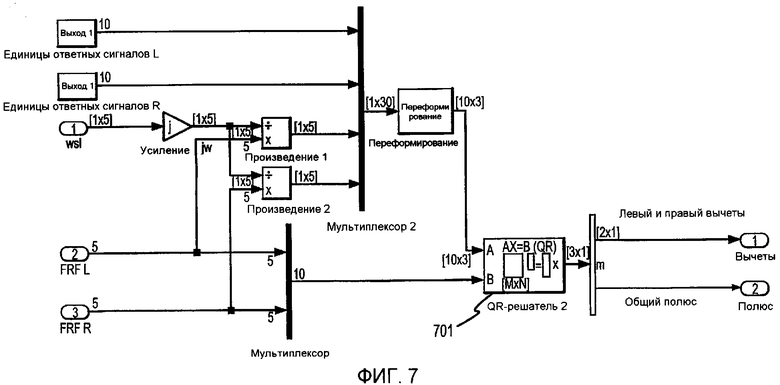
На Фиг.7 показана реализация решения полюса (λ) и вычета (R) согласно варианту осуществления изобретения.
Фиг.8 - структурная схема, показывающая расчет параметров системы M, C и K согласно варианту осуществления изобретения.
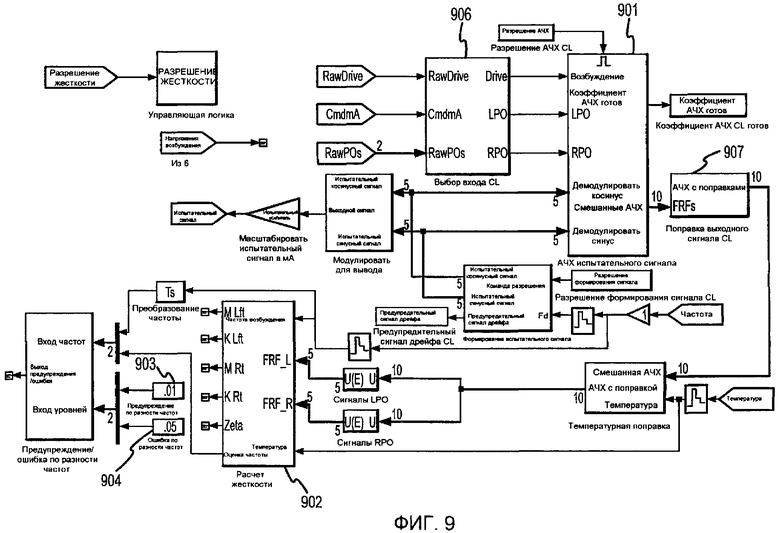
На Фиг.9 показана полная основанная на АЧХ система оценки жесткости согласно варианту осуществления изобретения.
Фиг.10 - блок-схема последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения.
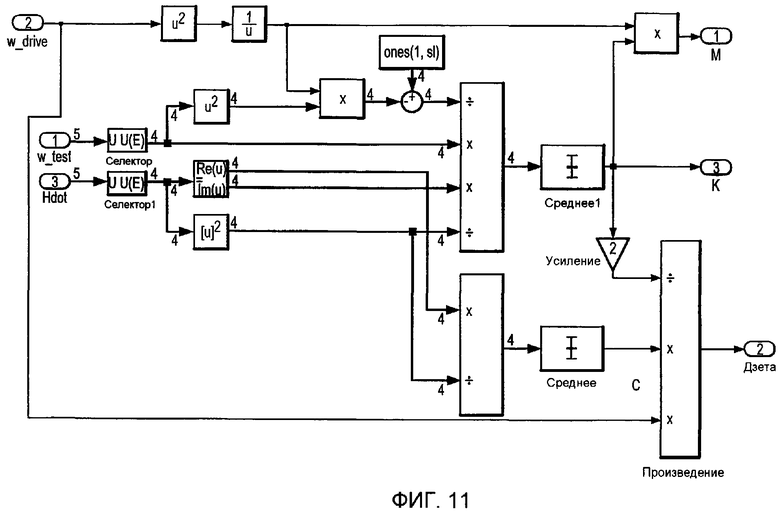
На Фиг.11 показана реализация решений M, C и K для характеристики с вычетом в полюсе второго порядка по уравнениям (29) согласно варианту осуществления изобретения.
На Фиг.12 показана полная система, основанная на АЧХ оценки жесткости согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг.1-12 и в последующем описании изображены отдельные примеры для обучения специалистов в данной области техники, каким образом реализовать и использовать наилучший вариант осуществления изобретения. Для цели изучения принципов изобретения, некоторые традиционные аспекты были упрощены или опущены. Специалисты в данной области техники должны принимать во внимание варианты из этих примеров, которые подпадают под объем изобретения. Специалисты в данной области техники должны принимать во внимание, что признаки, описанные ниже, могут комбинироваться различными способами для формирования многочисленных вариантов изобретения. Как результат, изобретение не ограничено отдельными примерами, описанными ниже, а только формулой изобретения и ее эквивалентами.
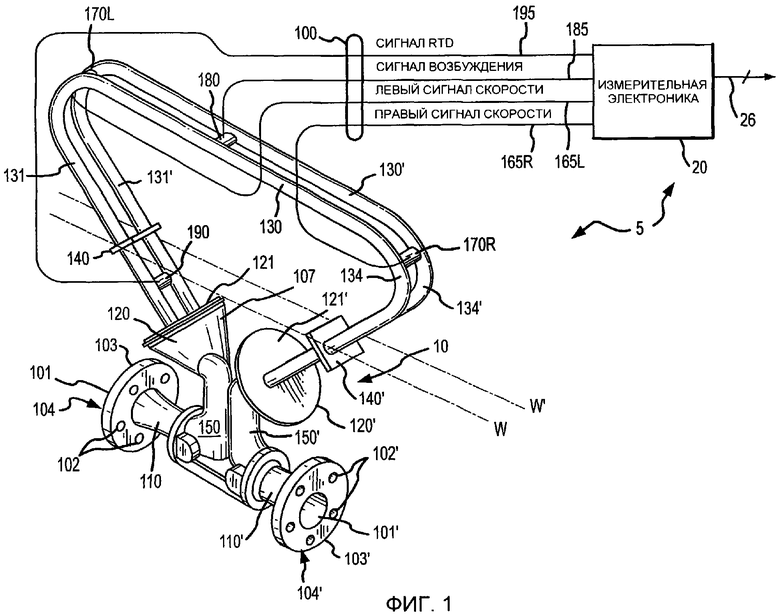
На Фиг.1 показан расходомер 5, содержащий измерительную сборку 10 и измерительную электронику 20. Измерительная сборка 10 реагирует на удельный массовый расход и плотность технологического материала. Измерительная электроника 20 присоединена к измерительной сборке 10 посредством провода 100 для предоставления информации о плотности, удельном массовом расходе и температуре через цепь 26, а также другой информации, не относящейся к настоящему изобретению. Описана конструкция расходомера Кориолиса, хотя специалистам в данной области техники очевидно, что настоящее изобретение могло бы быть осуществлено на практике в качестве вибрационного трубчатого плотномера без дополнительной возможности измерения, предусмотренной массовым расходомером Кориолиса.
Измерительная сборка 10 включает в себя пару патрубков 150 и 150', фланцы 103 и 103', имеющие горловины 110 и 110' фланцев, пару параллельных расходомерных трубок 130 и 130', механизм 180 возбуждения, датчик 190 температуры и пару датчиков 170L и 170R скорости. Расходомерные трубки 130 и 130' содержат два по существу прямых впускных колена 131 и 131' и выпускных колена 134 и 134', которые сходятся по направлению друг к другу на блоках 120 и 120' монтажа расходомерной трубки. Расходомерные трубки 130 и 130' согнуты на двух симметричных участках по своей длине и по существу параллельны по всей своей длине. Планки 140 и 140' ребер жесткости служат для определения осей W и W', около которых вибрирует каждая расходомерная трубка.
Боковые колена 131, 131' и 134, 134' расходомерных трубок 130 и 130' зафиксированы на блоках 120 и 120' монтажа расходомерных трубок, а эти блоки, в свою очередь, зафиксированы на патрубках 150 и 150'. Это обеспечивает непрерывный замкнутый тракт материала через измерительную сборку 10 Кориолиса.
Когда фланцы 103 и 103', имеющие отверстия 102 и 102', присоединены через впускной конец 104 и выпускной конец 104' к технологической линии (не показана), которая переносит технологический материал, который подвергается измерению, материал, который входит в конец 104 измерителя через отверстие 101 во фланце 103, проводится через патрубок 150 в блок 120 монтажа расходомерной трубки, имеющий поверхность 121. В пределах патрубка 150 материал разделяется и направляется через расходомерные трубки 130 и 130'. После выхода из расходомерных трубок 130 и 130', технологический материал повторно объединяется в единый поток в патрубке 150', а после этого направляется к выходному концу 104', присоединенному фланцем 103', имеющим болтовые отверстия 102', к технологической линии (не показана).
Расходомерные трубки 130 и 130' выбираются и надлежащим образом устанавливаются на блоки 120 и 120' монтажа расходомерных трубок, с тем чтобы иметь по существу одинаковое распределение масс, моменты инерции и модуль Юнга вокруг осей W--W и W'--W' изгиба, соответственно. Эти оси изгиба проходят через планки 140 и 140' ребер жесткости. Поскольку модуль Юнга расходомерных трубок меняется в зависимости от температуры, и это изменение затрудняет расчет расхода и плотности, резистивный термодатчик (RTD) 190 установлен на расходомерную трубке 130', чтобы непрерывно измерять температуру расходомерной трубки. Температура расходомерной трубки, а следовательно, напряжение, появляющееся на выводах RTD для заданного тока, проходящего через него, обусловлены температурой материала, проходящего через расходомерную трубку. Зависимое от температуры напряжение, появляющееся на выводах RTD, используется широко известным способом измерительной электроникой 20 для компенсации изменения модуля упругости расходомерных трубок 130 и 130', обусловленного любыми изменениями температуры расходомерной трубки. RTD присоединен к измерительной электронике 20 проводом 195.
Обе расходомерные трубки 130 и 130' приводятся в движение возбудителем 180 в противоположных направлениях около своих соответственных осей W и W' изгиба и, что показано, при первой несинфазной форме колебаний изгиба расходомера. Этот механизм 180 возбуждения может содержать любой из многочисленных широко известных компоновок, таких как магнит, установленный на расходомерную трубку 130', и противостоящая катушка, установленная на расходомерную трубку 130, и через которую пропускается переменный ток для вибрации обеих расходомерных трубок. Подходящий сигнал возбуждения подается измерительной электроникой 20, через провод 185, в механизм 180 возбуждения.
Измерительная электроника 20 принимает сигнал температуры RTD по проводу 195, а также левый и правый сигналы скорости, появляющиеся на проводах 165L и 165R, соответственно. Измерительная электроника 20 вырабатывает сигнал возбуждения, появляющийся на проводе 185, чтобы приводить в действие элемент 180 и заставлять колебаться трубки 130 и 130'. Измерительная электроника 20 обрабатывает левый и правый сигналы скорости и сигнал RTD, чтобы вычислять удельный массовый расход и плотность материала, проходящего через измерительную сборку 10. Эта информация, наряду с другой информацией, подается измерительной электроникой 20 через цепь 26 на средство 29 использования.
На Фиг.2 показана измерительная электроника 20 согласно варианту осуществления изобретения. Измерительная электроника 20 может включать в себя интерфейс 201 и систему 203 обработки данных. Измерительная электроника 20 принимает колебательный ответный сигнал 210, например, такой как из измерительной сборки 10. Измерительная электроника 20 обрабатывает колебательный ответный сигнал 210, чтобы получать характеристики потока материала, протекающего через измерительную сборку 10. В дополнение, в измерительной электронике 20 согласно изобретению, колебательный ответный сигнал 210 также обрабатывается для того, чтобы определять параметр (K) жесткости измерительной сборки 10. Более того, измерительная электроника 29 может обрабатывать два или более таких колебательных ответных сигналов, по прошествии времени, для того чтобы выявлять изменение (ΔK) жесткости в измерительной сборке 10. Определение жесткости может производиться при наличии потока или в его отсутствие. Преимущество определения без потока может обеспечивать сниженный уровень шумов в результирующем колебательном ответном сигнале.
Как обсуждено ранее, коэффициент калибровки расхода (FCF) отражает свойства материала и свойства поперечного сечения расходомерной трубки. Удельный массовый расход материала, протекающего через расходомер, определяется умножением измеренного запаздывания (или разности фаз/частоты) на FCF. FCF может зависеть от характеристики жесткости измерительной сборки. Если характеристика жесткости измерительной сборки изменяется, то FCF также будет изменяться. Изменения в жесткости расходомера, поэтому, будет влиять на точность измерений параметров потока, сформированных расходомером.
Изобретение является значимым, так как оно позволяет измерительной электронике 20 выполнять определение жесткости на месте, без выполнения калибровочных испытаний на реальном потоке. Это позволяет определять параметр жесткости без стенда калибровочных испытаний или другого специального оборудования, или специальных флюидов. Это желательно, так как выполнение калибровки потока на месте является дорогостоящим, затруднительным и отнимающим много времени. Однако, лучшая и более легкая проверка калибровки желательна, так как, во время использования, жесткость измерительной сборки 10 может изменяться со временем. Такие изменения, например, могут быть обусловлены факторами, например, такими как эрозия расходомерной трубки, коррозия расходомерной трубки и повреждение измерительной сборки 10.
Изобретение может быть проиллюстрировано математической моделью. Колебательный ответный сигнал расходомера может быть представлен моделью возбуждения второго порядка с разомкнутым контуром, являющейся:

где f - сила, прикладываемая к системе, M - масса системы, C - характеристика демпфирования и K - характеристика жесткости системы. Член K заключает в себе K=M(ω0)2, а член C является C=M2ζω0, где ζ является характеристикой затухания,
а ω0=2πf0, где f0 - собственная/резонансная частота измерительной сборки 10 в герцах. В дополнение, x - расстояние физического смещения колебания,  - скорость смещения расходомерной трубки, а
- скорость смещения расходомерной трубки, а  - ускорение. Это обычно указывается ссылкой как модель MCK. Эта формула может быть перегруппирована в форму:
- ускорение. Это обычно указывается ссылкой как модель MCK. Эта формула может быть перегруппирована в форму:
 (2)
(2)
Уравнение (2) дополнительно может быть преобразовано в форму передаточной функции. В форме передаточной функции используется член смещения на силу, являющейся:
 (3)
(3)
Широко известные магнитные уравнения могут использоваться для упрощения Уравнения (3). Двумя применимыми уравнениями являются:
 (4)
(4)
и
 (5)
(5)
Напряжение VEMF датчика по Уравнению (4) (на датчике 170L или 170R измерения) равно коэффициенту BLPO чувствительности датчика измерения, умноженному на скорость движения  датчика измерения. Коэффициент BLPO чувствительности датчика измерения обычно известен или измеряется для каждого датчика измерения. Сила (f), сформированная возбудителем 180, по уравнению (5) равна коэффициенту BLDR, умноженному на ток (I) возбуждения, подаваемый на возбудитель 180.
датчика измерения. Коэффициент BLPO чувствительности датчика измерения обычно известен или измеряется для каждого датчика измерения. Сила (f), сформированная возбудителем 180, по уравнению (5) равна коэффициенту BLDR, умноженному на ток (I) возбуждения, подаваемый на возбудитель 180.
Коэффициент BLDR чувствительности возбудителя 180 обычно известен или измеряется. Коэффициенты BLPO и BLDR оба являются функцией температуры и могут быть скорректированы измерением температуры.
При подстановке магнитных уравнений (4) и (5) в передаточную функцию по Уравнению (3), результатом является:
 (6)
(6)
Если измерительная сборка 10 является возбуждаемым разомкнутым контуром в резонансе, то есть, на резонансной/собственной частоте ω0 (где ω0=2πf0), то Уравнение (6) может быть переписано в виде:
 (7)
(7)
Подстановкой жесткости уравнение (7) упрощается в:
 (8)
(8)
Здесь, параметр (K) жесткости может быть выделен, для того чтобы получить:
 (9)
(9)
Как следствие, измерением/количественным определением характеристики (ζ) затухания, наряду с напряжением (V) возбуждения и током (I) возбуждения, может быть определен параметр (K) жесткости. Напряжение (V) ответного сигнала с датчиков перемещений могут определяться по колебательному ответному сигналу, наряду с током (I) возбуждения. Последовательность операций определения параметра (K) жесткости более подробно пояснена ниже, относительно к Фиг.3.
При использовании параметр (K) жесткости может отслеживаться со временем. Например, статистические методы могут использоваться для определения любых изменений во времени (то есть, изменения (ΔK) жесткости). Статистическое изменение в параметре (K) жесткости может указывать, что FCF для конкретного расходомера изменился.
Изобретение предусматривает параметр (K) жесткости, который не полагается на хранимые или подвергаемые выборке калибровочные значения плотности. В отличие от предшествующего уровня техники, где известный проточный материал используется в операции заводской калибровки для получения нормы плотности, которая может использоваться для всех будущих операций калибровки. Изобретение предусматривает параметр (K) жесткости, который получен исключительно по колебательным ответным сигналам расходомера. Изобретение предусматривает последовательность операций регистрации/калибровки жесткости без необходимости в последовательности операций заводской калибровки.
Интерфейс 201 принимает колебательный ответный сигнал 210 от одного из датчиков 170L и 170R скорости через провода 100 по Фиг.1. Интерфейс 201 может выполнять любое необходимое или желательное приведение сигналов в нужное состояние, такое как любой способ форматирования, усиления, буферизации и т.п. В качестве альтернативы, некоторые или все из приведений сигналов в нужное состояние могут выполняться в системе 203 обработки данных. В дополнение, интерфейс 201 может обеспечивать связь между измерительной электроникой 20 и внешними устройствами. Интерфейс 201 может допускать любой способ электронной, оптической или беспроводной связи.
Интерфейс 201, в одном из вариантов осуществления, связан с дискретизатором (не показан), при этом, сигнал датчика содержит аналоговый сигнал датчика. Дискретизатор осуществляет выборку и оцифровывает аналоговый колебательный ответный сигнал и выдает цифровой колебательный ответный сигнал 210.
Система 203 обработки данных управляет операциями измерительной электроники 20 и обрабатывает измерения параметров потока от сборки 10 расходомера. Система 203 обработки данных выполняет одну или более процедур обработки и, тем самым, обрабатывает измерения параметров потока, для того чтобы выводить одну или более характеристик потока.
Система 203 обработки данных может содержать компьютер общего применения, микропроцессорную систему, логическую схему, или некоторое другое устройство обработки общего применения или изготовленное по специальным требованиям заказчика. Система 203 обработки данных может быть распределена между многочисленными устройствами обработки. Система 203 обработки данных может включать в себя любой вид интегрального или независимого электронного запоминающего носителя, такого как система 204 хранения.
Система 204 хранения может хранить параметры расходомера и данные, процедуры программного обеспечения, постоянные значения и переменные значения. В одном из вариантов осуществления, система 204 хранения включает в себя процедуры, которые выполняются системой 203 обработки данных, такие как процедура 230 жесткости, которая определяет параметр (K) жесткости расходомера 5.
Процедура 230 жесткости в одном из вариантов осуществления может конфигурировать систему 203 обработки данных для приема колебательного ответного сигнала из расходомера, причем, колебательный ответный сигнал содержит ответный сигнал на вибрацию расходомера на по существу резонансной частоте, определения частоты (ω0) колебательного ответного сигнала, определения напряжения (V) ответного сигнала и тока (I) возбуждения колебательного ответного сигнала, измерения характеристики (ζ) затухания расходомера и определения параметра (K) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ζ) затухания (смотрите Фиг.3 и сопутствующее обсуждение).
Процедура 230 жесткости в одном из вариантов осуществления может конфигурировать систему 203 обработки данных для приема колебательного ответного сигнала, определения частоты, определения напряжения (V) ответного сигнала и тока (I) возбуждения, измерения характеристики (ζ) затухания и определения параметра (K) жесткости. Процедура 230 жесткости в этом варианте осуществления дополнительно конфигурирует систему 203 обработки данных для приема второго колебательного ответного сигнала из расходомера во второй момент t2 времени, повторения этапов определения и измерения для второго колебательного ответного сигнала для того, чтобы генерировать вторую характеристику (K2) жесткости, сравнения второй характеристики (K2) жесткости с параметром (K) жесткости, и регистрировать изменения (ΔK) жесткости, если вторая характеристика (K2) жесткости отличается от параметра (K) жесткости более чем на допуск 224 (смотрите Фиг.4 и сопроводительное описание).
В одном из вариантов осуществления, система 204 хранения хранит переменные, используемые для эксплуатации расходомера 5. Система 204 хранения в одном из вариантов осуществления хранит переменные, такие как колебательный ответный сигнал 210, который может приниматься, например, от датчиков 170L и 170R измерения/скорости.
В одном из вариантов осуществления, система 204 хранения хранит константы, коэффициенты и рабочие переменные. Например, система 204 хранения может хранить определенную характеристику 220 жесткости и вторую характеристику 221 жесткости, которая сформирована в более поздний момент времени. Система 204 хранения может хранить рабочие значения, такие как частота 212 колебательного ответного сигнала 210, напряжение 213 колебательного ответного сигнала 210 и ток 214 возбуждения колебательного ответного сигнала 210. Система 204 хранения, кроме того, может хранить базу 226 отсчета колебаний и измеренную характеристику 215 затухания расходомера 5. В дополнение, система 204 хранения может хранить константы, пороговые значения или диапазоны, такие как допуск 224. Более того, система 204 хранения может хранить данные, накопленные за период времени, такие как изменение 228 жесткости.
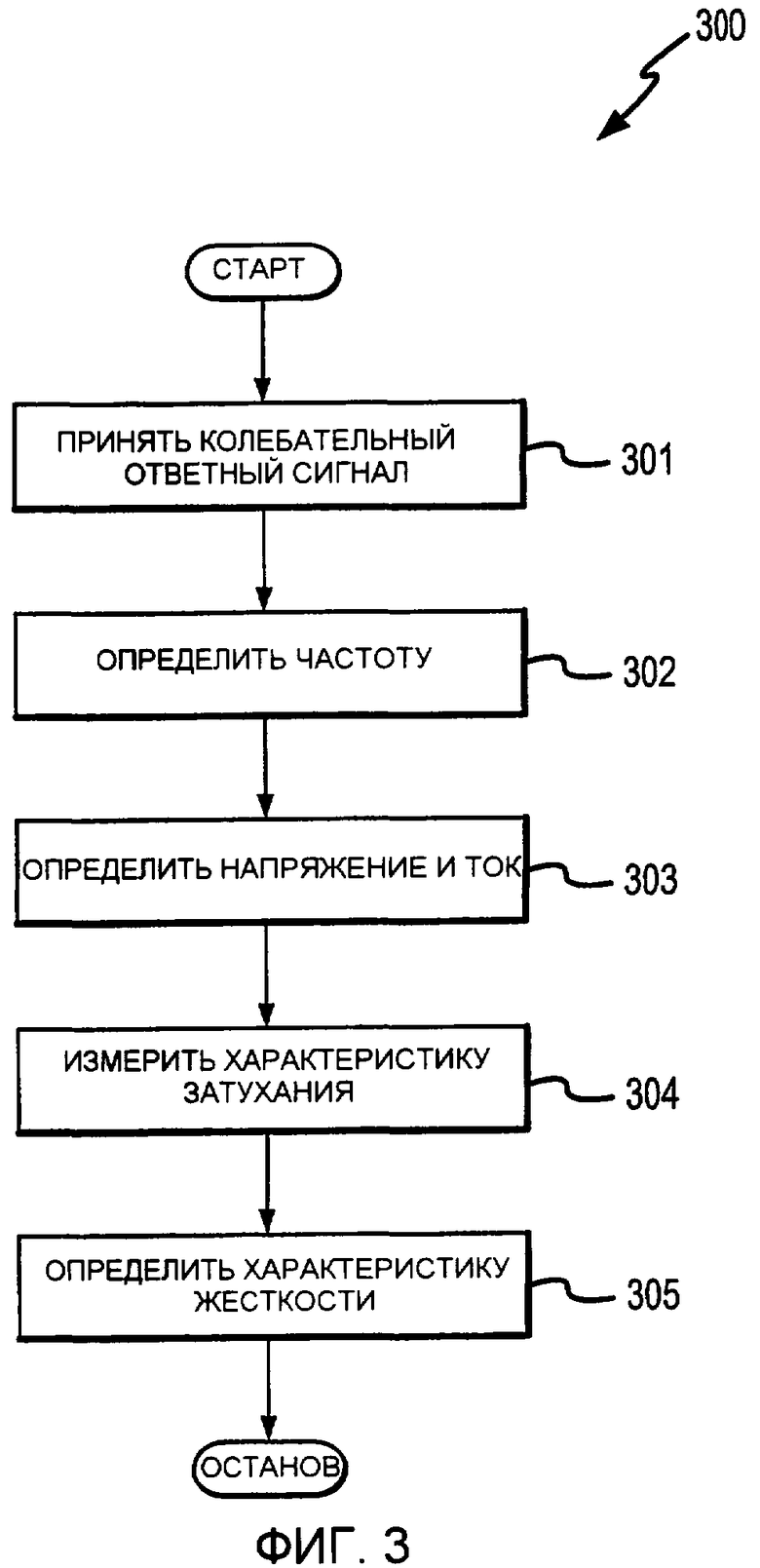
На Фиг.3 изображена блок-схема 300 последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения. На этапе 301, колебательный ответный сигнал принимают от расходомера. Колебательный ответный сигнал содержит ответный сигнал расходомера на вибрацию на по существу резонансной частоте. Колебание может быть непрерывным или пульсирующим. Проточный материал может быть протекающим через измерительную сборку 10 или может быть неподвижным.
На этапе 302, определяют частоту колебательного ответного сигнала. Частота ω0 может определяться по колебательному ответному сигналу любыми способом, последовательностью операций или аппаратными средствами.
На этапе 303, определяют напряжение (V или VEMF) колебательного ответного сигнала наряду с током (I) возбуждения. Напряжение и ток возбуждения можно получить из необработанного или приведенного в нужное состояние колебательного ответного сигнала.
На этапе 304, измеряют характеристику демпфирования расходомера. Характеристика демпфирования может измеряться посредством предоставления колебательному ответному сигналу расходомера возможности затухать вплоть до предопределенной базы отсчета колебаний наряду с измерением характеристики затухания. Это действие затухания может выполняться различными способами. Можно снижать амплитуду сигнала возбуждения, возбудитель 180 фактически может выполнять затормаживание измерительной сборки 10 (в соответствующих расходомерах), или возбудитель 180 может просто подвергать отключению питания до тех пор, пока не достигнута база отсчета. В одном из вариантов осуществления, база отсчета колебаний содержит пониженный уровень заданного значения возбуждения. Например, если заданное значение возбуждения в текущий момент находится на 3,4 мВ/Гц, то для измерения демпфирования, заданное значение возбуждения может быть снижено до более низкого значения, например, такого как 2,5 мВ/Гц. Этим способом измерительная электроника 20 может позволять измерительной сборке 10 просто двигаться по инерции до тех пор, пока колебательный ответный сигнал по существу не выравнивается с этой новой базой отсчета возбуждения.
На этапе 305, параметр (K) жесткости определяют по частоте, напряжению, току возбуждения и характеристике (ζ) затухания. Параметр (K) жесткости можно определять согласно Уравнению (9), приведенному выше. В дополнение к определению и отслеживанию жесткости (K), способ также может содержать этапы, на которых определяют и отслеживают параметр (C) демпфирования и параметр (M) массы.
Способ 300 может быть итеративным, периодическим или выполняемым произвольно. Способ 300 может выполняться на предопределенных реперах, например, в предопределенные часы работы, при изменении проточного материала и т.п.
На Фиг.4 представлена блок-схема 400 последовательности операций способа для определения изменения (ΔK) жесткости в расходомере согласно варианту осуществления изобретения. На этапе 401, колебательный ответный сигнал принимают от расходомера, как описано ранее.
На этапе 402, определяют частоту колебательного ответного сигнала, как описано ранее.
На этапе 403, определяют напряжение и ток возбуждения колебательного ответного сигнала, как описано ранее.
На этапе 404, определяют характеристику (ζ) затухания расходомера, как описано ранее.
На этапе 405, параметр (K) жесткости определяют по частоте, напряжению, току возбуждения и характеристике (ζ) затухания, как описано ранее.
На этапе 406, второй колебательный ответный сигнал принимают во второй момент t2 времени. Второй колебательный ответный сигнал генерируется из вибрации измерительной сборки 10 в момент t2 времени.
На этапе 407, вторая характеристика K2 жесткости генерируется из второго колебательного ответного сигнала. Вторая характеристика K2 жесткости может генерироваться, например, с использованием этапов с 401 по 405.
На этапе 408, вторую характеристику K2 жесткости сравнивают с параметром (K) жесткости. Этап сравнения содержит сравнение характеристик жесткости, которые получены в разные моменты времени для того, чтобы выявлять изменение (ΔK).
На этапе 409, определяют любое изменение (ΔK) жесткости между K2 и K. Определение изменения жесткости может применять любой вид статистического или математического способа для определения значимого изменения в жесткости. Изменение (ΔK) жесткости может быть сохранено для будущего использования и/или может быть передано в удаленное местоположение. В дополнение, изменение (ΔK) жесткости может инициировать состояние предупредительной сигнализации в измерительной электронике 20. Изменение (ΔK) жесткости в одном из вариантов осуществления сначала сравнивают с допуском 224. Если изменение (ΔK) жесткости превышает допуск 224, то определяют состояние ошибки. В дополнение к определению и отслеживанию жесткости (K), способ также может содержать этапы, на которых определяют и отслеживают параметр (C) демпфирования и параметр (M) массы.
Способ 400 может быть итеративным, периодическим или выполняемым произвольно. Способ 400 может выполняться на предопределенных реперах, например, в предопределенные часы работы, при изменении проточного материала и т.п.
На Фиг.5 показана измерительная электроника 20 согласно другому варианту осуществления изобретения. Измерительная электроника 20 в этом варианте осуществления может включать в себя интерфейс 201, систему 203 обработки данных и систему 204 хранения, как обсуждено ранее. Измерительная электроника 20 принимает три или более колебательных ответных сигнала 505, например, таких как от измерительной сборки 10. Измерительная электроника 20 обрабатывает три или более колебательных ответных сигнала 505, чтобы получать характеристики потока материала, протекающего через измерительную сборку 10. В дополнение, три или более колебательных ответных сигнала 505 также обрабатываются для того, чтобы определять параметр (K) жесткости измерительной сборки 10. Измерительная электроника 20, кроме того, может определять параметр (C) демпфирования и параметр (M) массы по трем или более колебательным ответным сигналам 505. Эти параметры измерительной сборки могут использоваться для детектирования изменений в измерительной сборке 10, как обсуждено ранее.
Система 204 хранения может хранить процедуры обработки, такие как процедура 506 жесткости. Система 204 хранения может хранить принятые данные, такие как колебательные ответные сигналы 505. Система 204 хранения может хранить предварительно запрограммированные или введенные пользователем значения, такие как допуск 516 по жесткости, допуск 517 по демпфированию и допуск 518 по массе. Система 204 хранения может хранить рабочие значения, такие как полюс (λ) 508 и вычет (R) 509. Система 204 хранения может хранить определенные окончательные значения, такие как жесткость (K) 510, демпфирование (C) 511 и масса (M) 512. Система 204 хранения может хранить значения сравнения, сформированные и эксплуатируемые в течение периодов времени, такие как вторая жесткость (K2) 520, второе демпфирование (C2) 521, вторая масса (M2) 522, изменение (ΔK) 530 жесткости, изменение (ΔC) 531 демпфирования и изменение (ΔM) 532 массы. Изменение (ΔK) 530 жесткости может содержать изменение в параметре (K) жесткости измерительной сборки 10 в качестве измеренного по прошествии времени. Изменение (ΔK) 530 жесткости может использоваться для выявления и определения физических изменений измерительной сборки 10 со временем, таких как результаты коррозии и эрозии. В дополнение, параметр (M) 512 массы измерительной сборки 10 может измеряться и отслеживаться со временем и сохраняться в изменении (ΔM) 532 массы, а параметр (C) 511 демпфирования может измеряться со временем и сохраняться в изменении (ΔC) 531 демпфирования. Изменение (ΔM) 532 массы может указывать наличие отложения проточных материалов в измерительной сборке 10, а изменение (ΔC) 531 демпфирования может указывать на изменение в расходомерной трубке, в том числе, ухудшение свойств материала, эрозию и коррозию, растрескивание и т.п.
При использовании, измерительная электроника 20 принимает три или более колебательных ответных сигнала 505 и обрабатывает колебательные ответные сигналы 505 с использованием процедуры 506 жесткости. В одном из вариантов осуществления, три или более колебательных ответных сигнала 505 содержат пять колебательных ответных сигналов 505, как будет описано ниже. Измерительная электроника 20 определяет полюс (λ) 508 и вычет (R) 509 по колебательным ответным сигналам 505. Полюс (λ) 508 и вычет (R) 509 могут содержать полюс и вычет первого порядка или могут содержать полюс и вычет второго порядка. Измерительная электроника 20 определяет параметр (K) 510 жесткости, параметр (C) 511 демпфирования и параметр (M) 512 массы по полюсу (λ) 508 и вычету (R) 509. Измерительная электроника 20 дополнительно может определять вторую жесткость
(K2) 520, может определять изменение (ΔK) 530 жесткости по параметру (K) 510 жесткости и второй жесткости (K2) 520 и может сравнивать изменение (ΔK) 530 жесткости с допуском 516 по жесткости. Если изменение (ΔK) 530 жесткости превышает допуск 516 по жесткости, измерительная электроника 20 может инициировать какой-нибудь способ регистрации ошибки и/или процедуру обработки ошибки. Подобным образом, измерительная электроника 20 дополнительно может отслеживать параметры демпфирования и массы с течением времени и может определять и регистрировать второе демпфирование (C2) 521 и вторую массу (M2), а также результирующие изменение (ΔC) 531 демпфирования и изменение (ΔM) 532 массы. Изменение (ΔC) 531 демпфирования и изменение (ΔM) 532 массы, подобным образом, может сравниваться с допуском 517 по демпфированию и допуском 518 по массе.
Изобретение может быть проиллюстрировано математической моделью. Колебательный ответный сигнал расходомера может быть представлен моделью возбуждения второго порядка с разомкнутым контуром, являющимся:
 (10)
(10)
где f - сила, прикладываемая к системе, M - параметр массы системы, C - параметр демпфирования и K - параметр жесткости. Член K заключает в себе K=M(ω0)2, а член C заключает в себе C=M2ζω0, ω0=2πf0, а f0 - резонансная частота измерительной сборки 10 в герцах. Член C заключает в себе измерение характеристики затухания, полученное из колебательного ответного сигнала, как обсуждено ранее. В дополнение, x - расстояние физического смещения колебания,  - скорость смещения расходомерной трубки, а
- скорость смещения расходомерной трубки, а  - ускорение. Это обычно указывается ссылкой как модель MCK. Эта формула может быть перегруппирована в форму:
- ускорение. Это обычно указывается ссылкой как модель MCK. Эта формула может быть перегруппирована в форму:
 (11)
(11)
Уравнение (11) дополнительно может быть преобразовано в форму передаточной функции при пренебрежении начальными условиями. Результатом является:
 (12)
(12)
Дополнительная манипуляция может преобразовать Уравнение (12) в форму амплитудно-частотной характеристики с вычетом в полюсе первого порядка, содержащей:
 (13)
(13)
где λ - полюс, R - вычет, член (j) заключает в себе квадратный корень из -1, а ω - угловая частота возбуждения (в радианах в секунду).
Параметры системы, содержащие собственную/резонансную частоту (ωn), демпфированную собственную частоту (ωd) и характеристику (ζ) затухания, определяются полюсом.
 (14)
(14)
 (15)
(15)
 (16)
(16)
Параметр (K) жесткости, параметр (C) демпфирования и параметр (M) массы системы могут выводиться из полюса и вычета.
 (17)
(17)
 (18)
(18)
 (19)
(19)
Следовательно, параметр (K) жесткости, параметр (M) массы и параметр (C) демпфирования могут рассчитываться на основании хорошей оценки полюса (λ) и вычета (R).
Полюс и вычет оцениваются по измеренным амплитудно-частотным характеристикам. Полюс (λ) и вычет (R) могут оцениваться с использованием некоторого вида прямого или итеративного вычислительного способа.
Ответный сигнал около частоты возбуждения, главным образом, состоит из первого члена Уравнения (13), с комплексно сопряженным членом, вносящим вклад только небольшой, почти постоянной «вычетной» части ответного сигнала. Как результат, Уравнение (13) может быть упрощено до:
 (20)
(20)
В Уравнении (20), член H(ω) является измеренной амплитудной частотной характеристикой (АЧХ, FRF), полученной по трем или более колебательным ответным сигналам. В этом изобретении H состоит из выходного сигнала смещения, деленного на входную силу. Однако, с датчиками перемещений звуковой катушки, типичными для расходомера Кориолиса, измеренная АЧХ (то есть, член  ) находится в показателях скорости, деленной на силу. Поэтому, уравнение (20) может быть преобразовано в форму:
) находится в показателях скорости, деленной на силу. Поэтому, уравнение (20) может быть преобразовано в форму:
 (21)
(21)
Уравнение (21) дополнительно может быть перегруппировано в форму, которая легко разрешима относительно полюса (λ) и вычета (R).

 (22)
(22)

Уравнение (22) образует сверхопределенную систему уравнений. Уравнение (22) может решаться вычислительным образом, для того чтобы определять полюс (λ) и вычет (R) по АЧХ ( ) скорость/сила. Члены H, R и λ являются комплексными.
) скорость/сила. Члены H, R и λ являются комплексными.
В одном из вариантов осуществления, частотой ω возбуждающей силы являются 5 тонов. 5 тонов в этом варианте осуществления содержат частоту возбуждения, а также два тона выше частоты возбуждения и 2 тона ниже. Тоны могут быть отделены от основной частоты на такую малую величину, как 0,5-2 Гц. Однако частота ω возбуждающей силы может содержать большее количество тонов или меньшее количество тонов, такое как частота возбуждения и по 1 тону выше и ниже. Однако, с помощью 5 тонов добиваются хорошего компромисса между точностью результата и временем обработки, необходимым для получения результата.
Отметим, что в предпочтительном измерении АЧХ, две АЧХ измеряются для конкретной частоты возбуждения и колебательного ответного сигнала. Одно измерение АЧХ получают от возбудителя для правого датчика перемещений (RPO) и одно измерение АЧХ получают от возбудителя левого датчика перемещений (LPO). Этот подход назван с одним входом и многими выходами (SIMO). В отличительном новом признаке этого изобретения, технология SIMO используется для лучшей оценки полюса (λ) и вычета (R). Ранее, две АЧХ использовались отдельно для предоставления двух отдельных оценок полюса (λ) и вычета (R). Осознавая, что две АЧХ совместно используют общий полюс (λ), но отдельные вычеты (RL) и (RR), два измерения могут преимущественно объединяться, чтобы получать в результате более устойчивое определение полюса и вычета.
 (23)
(23)
Уравнение (23) может решаться любым способом. В одном из вариантов осуществления, уравнение решается посредством рекурсивного метода наименьших квадратов. В еще одном варианте осуществления, уравнение решается методом псевдоинверсии. В еще одном другом варианте осуществления, так как все из измерений имеются в распоряжении одновременно, может использоваться метод Q-R-разложения. Метод Q-R-разложения рассмотрен в Modern Control Theory, William Brogan, Copyright 1991, Prentice Hall, pp.222-224, 168-172.
В употреблении, параметр (K) жесткости наряду с параметром (C) демпфирования и параметром (M) массы могут отслеживаться с течением времени. Например, статистические методы могут использоваться для определения любых изменений в параметре (K) жесткости с течением времени (то есть, изменения (ΔK) жесткости). Статистическое изменение в параметре (K) жесткости может указывать на то, что FCF для конкретного расходомера изменился.
Изобретение предусматривает параметр (K) жесткости, который не полагается на хранимые или подвергаемые выборке калибровочные значения плотности. В противоположность предшествующему уровню техники, где известный проточный материал используется в операции заводской калибровки для получения нормы плотности, которая может использоваться для всех будущих операций калибровки. Изобретение предусматривает параметр (K) жесткости, который получен исключительно по колебательным ответным сигналам расходомера. Изобретение предусматривает последовательность операций детектирования/калибровки жесткости без необходимости в последовательности операций заводской калибровки.
Фиг.6 - блок-схема 600 последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения. На этапе 601, принимаются три или более колебательных ответных сигналов. Три или более колебательных ответных сигналов могут приниматься от расходомера. Три или более колебательных ответных сигналов включают в себя колебательный ответный сигнал по существу основной частоты и два или более колебательных ответных сигнала неосновных частот. В одном из вариантов осуществления, принимается один тон выше ответного сигнала основной частоты, и принимается один тон ниже ответного сигнала основной частоты. В другом варианте осуществления, принимаются два или более тонов выше ответного сигнала основной частоты, и принимаются два или более тона ниже ответного сигнала основной частоты.
В одном из вариантов осуществления, тоны по существу равноудаленно разнесены выше и ниже ответного сигнала основной частоты. В качестве альтернативы, тоны разнесены не равноудаленно.
На этапе 602, генерируют частотную характеристику с вычетом в полюсе первого порядка по трем или более колебательным ответным сигналам. Частотная характеристика с вычетом в полюсе первого порядка принимает форму, приведенную в уравнении (23).
На этапе 603, параметр (M) массы определяют по частотной характеристике с вычетом в полюсе первого порядка. Параметр (M) массы определяют определением полюса (λ) первого порядка и вычета (R) первого порядка колебательных ответных сигналов. Затем, собственная частота ωn, демпфированная собственная частота ωd и характеристика (ζ) затухания определяются по полюсу (λ) и вычету (R) первого порядка. Впоследствии, демпфированная собственная частота ωd, вычет (R) и мнимый член (j) подставляют в Уравнение (17) для того, чтобы получить параметр (M) массы.
На этапе 604, параметр (K) жесткости определяют из решения Уравнения (18). Решение применяет собственную частоту ωn, и определенный параметр (M) массы из этапа 603 подставляют в Уравнение (18) для того, чтобы получить параметр (K) жесткости.
На этапе 605, параметр (C) демпфирования определяют из решения Уравнения (19). Решение применяет характеристику (ζ) затухания, собственную частоту ωn и определенный параметр (M) массы.
На Фиг.7 показана реализация решений полюса (λ) и вычета (R) согласно варианту осуществления изобретения. Реализация является следствием Уравнения (23). Входные сигналы АЧХ находятся слева схемы. Этими входными сигналами АЧХ являются пять частот, на которых рассчитываются коэффициенты АЧХ в этом варианте осуществления (четыре частоты испытательного сигнала и частота возбуждения). Входные сигналы FRF_L и FRF_R являются комплексными коэффициентами АЧХ датчика перемещения возбудителя на таких частотах, соответствующими  и
и  в Уравнении (23). Коэффициенты АЧХ проводятся на вход B блока 701 решателя QR. Матрица A для блока 701 решателя QR формируется из коэффициентов АЧХ, деленных на jω на почленной основе, и содержит столбцы из единиц и нулей, чтобы согласовываться с Уравнением (23). Матрица переформируется в надлежащие комплексные измерения [10×3] и передается на вход A блока 701 решателя QR. Выходной сигнал вектора x блока 701 решателя QR содержит левый и правый вычеты RL и RR и полюс λ. Эти выходные сигналы пересылают из блока 701 QR для обработки, для того чтобы генерировать параметры системы.
в Уравнении (23). Коэффициенты АЧХ проводятся на вход B блока 701 решателя QR. Матрица A для блока 701 решателя QR формируется из коэффициентов АЧХ, деленных на jω на почленной основе, и содержит столбцы из единиц и нулей, чтобы согласовываться с Уравнением (23). Матрица переформируется в надлежащие комплексные измерения [10×3] и передается на вход A блока 701 решателя QR. Выходной сигнал вектора x блока 701 решателя QR содержит левый и правый вычеты RL и RR и полюс λ. Эти выходные сигналы пересылают из блока 701 QR для обработки, для того чтобы генерировать параметры системы.
Фиг.8 - структурная схема, показывающая расчет параметров M, C и K системы согласно варианту осуществления изобретения. Реализация определяет параметры системы, M, C и K из оценок полюсов и вычетов по Уравнениям (14-16) и Уравнениям (17-19). Вычеты являются чисто мнимыми для действительной нормальной модальной модели. Однако, всегда будет некоторая действительная часть, обусловленная шумами в данных измерения и вследствие проблем числовой точности подгонки модели. Поэтому, используют абсолютное значение вычета, которое имеет подобный результат, как деление на j по Уравнению (17). Массу и жесткость рассчитывают с использованием полюса и вычета по Уравнениям (17-18). Отметим, что есть «левые» и «правые» масса и жесткость, то есть, масса и жесткость, рассчитанные по АЧХ LPO/возбудитель и RPO/возбудитель. Оценки массы и жесткости могут отличаться от правых к левым вследствие асимметрий в катушках и магнитах, и в самой конструкции. Изменения в разницах или разностных отношениях указывают неравномерное изменение в массе или жесткости и может использоваться для выдачи дополнительной диагностической информации об изменениях в FCF или целостности расходомера.
Двумя другими выходными сигналами из расчетов параметров системы являются коэффициент демпфирования, дзета или ζ, и собственная частота ωn. Этот вариант осуществления дает более полно определенный или лучше оцененный набор глобальных параметров.
Оценка ωn дает хорошую проверку качества для системы возбуждения с разомкнутым контуром. Если возбуждение является действительно работающим на резонансе, частота возбуждения должна согласовываться до в пределах нескольких миллигерц с оценкой собственной частоты. Если разница в более чем несколько миллигерц, может устанавливаться предупредительный признак, указывающий, что система возбуждения не работает надлежащим образом или что текущая оценка жесткости является сомнительной.
На Фиг.9 показана полная основанная на АЧХ система оценки жесткости согласно варианту осуществления изобретения. Есть семь отдельных входов в подсистему оценки жесткости, указанных пятиугольниками, которые являются источниками сигналов (пять вверху слева и два далеко справа). Входные сигналы «RawDrive» («Исходный ток возбуждения») и «RawPOs» («Исходные напряжения датчиков перемещений») являются необработанными отсчетами напряжений датчиков перемещений и тока возбуждения. Эти сигналы дискретизируются с понижением частоты до 2 кГц, например, посредством прореживания, а затем, подаются в подсистему оценки коэффициентов АЧХ. Входной сигнал «CmdmA» («Запрограммированная амплитуда») является запрограммированным током, который отбирается с выхода соответствующей цифровой системы возбуждения. Оценка «StiffnessEnable» («Разрешение жесткости») является логическим входом, предоставляющим цифровой системе возбуждения возможность контролировать, когда активен алгоритм подтверждения действительности FCF. Входной сигнал «freq» («частота») является частотой возбуждения, которая оценена цифровой системой возбуждения. Он вводится в подсистему генератора испытательных сигналов и подсистему расчета жесткости.
Блок 902 расчета жесткости по АЧХ выводит оценки параметров Lft и Rt M&K (левый и правый M&K) системы, а также Дзета (ζ) и FreqEst (оценку частоты). Таковые являются основными выходными сигналами диагностики, используемыми при проверке действительности FCF. Фигура также показывает блок 903 предупреждения по разнице частот и блок 904 ошибки по разнице частот, которые реализуют проверку качества возбуждения, обсужденную выше, посредством сравнения частоты возбуждения с оцененной собственной частотой.
Измерение АЧХ нормально могло бы потребовать измерения тока, делающего необходимым дополнительный аналого-цифровой (A/D) преобразователь. Однако, этот вариант осуществления использует калиброванный запрограммированный ток, избегая необходимости в дополнительном аналого-цифровом преобразователе. Блок 906 выбора входа CL и блок 907 поправки выхода CL реализуют алгоритм калибровки. Последовательность операций калибровки использует блок 901 «АЧХ испытательного сигнала» для расчета амплитудно-частотной характеристики фактического тока (RawDrive) относительно запрограммированного тока (CmdmA) в одном из состояний управляющей логики. Во время состояния логики подтверждения действительности FCF, АЧХ между исходными POs и запрограммированным током рассчитывается и подвергается поправке исходными значениями относительно коэффициентов АЧХ запрограммированного тока, чтобы давать АЧХ, используемые для дальнейшей обработки.
Алгоритм оценки жесткости по АЧХ выводит выходной сигнал «TestSignal» («Испытательный сигнал») по центру слева схемы по фигуре. Этот выход испытательного сигнала содержит возбуждение на четырех испытательных частотах, которые добавляются в команду возбуждения непосредственно перед выводом. Эти испытательные сигналы добавляются в цифровой сигнал возбуждения, когда разрешено подтверждение действительности FCF.
Логика такова, что, когда проверка действительности FCF отключена, цифровой сигнал возбуждения проходит через правый коммутатор или другое устройство, где он дискретизируется с повышением частоты из его базовой частоты выборки (типично 4 кГц) фильтром интерполяции в надлежащую выходную частоту выборки, типично, 8 кГц. Когда проверка действительности FCF разрешена, испытательные сигналы, дискретизированные с повышением частоты от 2 до 4 кГц, добавляются в цифровой сигнал возбуждения. Сигнал возбуждения, в таком случае, состоит из сигнала частоты возбуждения разомкнутого контура и 4 испытательных тонов, все из которых затем проходят через фильтр дискретизации с повышением частоты.
Процедура подтверждения действительности FCF, желательно, прозрачна по отношению к системе возбуждения. В одном из вариантов осуществления, испытательные сигналы удаляются из датчиков перемещений, чтобы гарантировать хорошую оценку частоты и амплитуды для возбуждения замкнутого контура. Это делается с помощью набора узкополосных режекторных фильтров, настроенных на точные частоты испытательных сигналов.
В другом варианте осуществления, подход с вычетом в полюсе может использовать амплитудно-частотную характеристику с вычетом в полюсе второго порядка для того, чтобы достичь лучшего результата. Подход с вычетом в полюсе второго порядка обеспечивает более точную подгонку к реальным данным, чем подход с вычетом в полюсе первого порядка. Компромисс состоит в большей числовой сложности и увеличенном времени обработки.
Вариант осуществления MCK оценки жесткости начинает с простой модели системы второго порядка, как показанная в Уравнении (24), приведенном ниже. Поскольку датчики перемещений расходомера измеряют скорость, а не положение, уравнение дифференцируется, а затем выражается в числах на конкретной частоте ω.

 (24)
(24)

Поскольку цель состоит в том, чтобы найти M, C и K из измерений тока (или силы) возбуждения и напряжения (или скорости) датчика перемещений, Уравнение (24) удобно переписать, чтобы отделить неизвестные. Это дает Уравнение (25).
 (25)
(25)
В этот момент Уравнение может быть разделено на действительную и мнимую части.

 (26)
(26)
Развернутое  , Уравнение (26) может быть переписано, как:
, Уравнение (26) может быть переписано, как:


Второе Уравнение теперь относится к простому алгебраическому решению. Для того чтобы упростить первую часть уравнения, применяется измеренная резонансная частота возбуждения. Поскольку  , может быть найдено, что:
, может быть найдено, что:

 (28)
(28)
при условии, что ω≠ωn. Выводя M из этого решения для K, три решения для M, C и K задаются в Уравнении (29).

 (29)
(29)

Отметим, что при заданной резонансной частоте ωn, АЧХ датчика измерителя возбудителя на одной конкретной частоте ωl достаточна для решения уравнений и определения параметров M, C и K. Это особенно полезно; когда АЧХ берутся на многочисленных частотах, подбор методом наименьших квадратов к данным является просто средним отдельных оценок каждого коэффициента. Это является хорошим приемом, более простым, чем псевдоинверсия, которая типично должна была бы выполняться. Отметим, тем не менее, что ограничение, что ω ≠ ωn, исключает использование АЧХ резонансного возбуждения в решении для K или M. Это не является особенно неожиданным, поскольку высота пика в резонансе определяется исключительно демпфированием. Один потенциальный недостаток этого подхода, однако, состоит в том, что параметры, оцененные по данным левого и правого датчика измерителя, являются обязательно независимыми друг от друга. Это имеет место в отличие от способа с вычетом в полюсе, где некоторое преимущество, выигранное ограничением левого и правого датчиков измерителя оценкой одного и того же полюса, несмотря на их различия по амплитуде.
Фиг.10 - блок-схема 1000 последовательности операций способа для определения параметра (K) жесткости расходомера согласно варианту осуществления изобретения. На этапе 1001, принимаются три или более колебательных ответных сигналов, как обсуждено ранее.
На этапе 1002, формируют частотную характеристику с вычетом в полюсе второго порядка по трем или более колебательным ответным сигналам. Частотная характеристика с вычетом в полюсе второго порядка принимает форму, заданную в Уравнении (24).
На этапе 1003, параметр (K) жесткости определяют из решения Уравнения (29). Решение использует собственную частоту ωn, один или более частотных тонов ω, мнимую часть АЧХ (то есть, мнимую составляющую  ) и амплитуду АЧХ (то есть, абсолютное значение
) и амплитуду АЧХ (то есть, абсолютное значение  ).
).
На этапе 1004, параметр (M) массы определяют по частотной характеристике с вычетом в полюсе второго порядка. Параметр (M) массы определяется из решения Уравнения (29) и получается с использованием параметра (K) жесткости и собственной частоты ωn.
На этапе 1005, параметр (C) демпфирования определяют по частотной характеристике с вычетом в полюсе второго порядка. Параметр (C) демпфирования определяют из решения Уравнения (29) и получают с использованием одного или более частотных тонов ω, действительной части АЧХ (то есть, действительной составляющей  ) и амплитуды АЧХ (то есть, абсолютного значения
) и амплитуды АЧХ (то есть, абсолютного значения  ).
).
На Фиг.11 показана реализация решений M, C и K для характеристики с вычетом полюсов второго порядка по уравнениям (29) согласно варианту осуществления изобретения. Входы выглядят как овальные входные порты слева по схеме. Таковые являются измеряемой частотой ω_drive возбуждения, которая используется в уравнениях (29) в качестве ωn, пяти частот, на которых были рассчитаны коэффициенты АЧХ (четыре частоты испытательных сигналов и частота возбуждения, представленные посредством ω_test), и комплексных коэффициентов АЧХ датчиков перемещения возбудителя, рассчитанных на таких частотах ( или Hdot). АЧХ частоты возбуждения отбрасывают блоками селекторов, поскольку она не может использоваться в решениях M и K, как описано ранее. Решение K вычисляется в качестве
или Hdot). АЧХ частоты возбуждения отбрасывают блоками селекторов, поскольку она не может использоваться в решениях M и K, как описано ранее. Решение K вычисляется в качестве
 (30)
(30)
каковое является эквивалентной формой решения, данного в Уравнениях (29). Решение для C является такой же формой, как выведенное решение в Уравнениях (29), а M вычисляется непосредственно из решения для K. Отметим операцию усреднения, которая применяется к каждой оценке коэффициента. Это усреднение имеет следствием решений, которые являются подбором методом наименьших квадратов к входным данным. В заключение, при заданных оценках M, C и K, характеристика затухания (ζ или дзета) вычисляется в качестве:
 (31)
(31)
Характеристика затухания (ζ) считается более полезным параметром, чем параметр C демпфирования. Поэтому, масса M, жесткость K и характеристика (ζ) затухания являются выходными данными измерения.
На Фиг.12 показана полная система основанная на АЧХ оценки жесткости согласно варианту осуществления изобретения. Есть шесть отдельных входов в систему, указанных пятиугольниками, которые являются источниками сигналов (три наверху слева и три внизу справа). Входные сигналы «RawDrIVe» («Исходный ток возбуждения») и «RawPOs» («Исходные напряжения датчиков перемещений») являются необработанными отсчетами с датчиков перемещений и тока возбуждения. Эти сигналы дискретизируются с понижением частоты до 2 кГц блоком 1201 прореживателя, а затем, подаются в подсистему оценки коэффициентов АЧХ. Входной сигнал «DrIVeDeMod» («Демодуляция сигнала возбуждения») является синусоидальным или косинусоидальным сигналом на частоте возбуждения, который отбирается из цифровой системы возбуждения. Эти сигналы объединяются с синусоидами, сформированными на испытательных частотах, и подаются в подсистему оценки коэффициентов АЧХ в качестве базисов для демодуляции. Оценка «StiffnessEnable» («Разрешение жесткости») является логическим входом, предоставляющим цифровой системе возбуждения контролировать, когда активен алгоритм оценки жесткости. Входной сигнал «freq» («частота») является частотой возбуждения, которая оценена цифровой системой возбуждения. Входной сигнал вводят в блок 1204 формирования испытательных сигналов и блок 1206 расчета жесткости. Входной сигнал «Temp» («Температура») является температурой, считанной с расходомера, которая вводится в блок 1207 температурной поправки. Алгоритм оценки жесткости по АЧХ выводит оценки параметров системы, а также выходной сигнал «TestSignal» («Испытательный сигнал») на дальней левой стороне схемы. Этот выход испытательного сигнала содержит возбуждение на четырех испытательных частотах, которые добавляются в команду возбуждения.
Эти входные сигналы и выходные сигналы формируют основную часть интерфейса с цифровым возбудителем. Испытательные сигналы добавляют в команду возбуждения непосредственно перед выводом в устройство возбудителя. Для того чтобы сделать эту процедуру подтверждения действительности FCF прозрачной для системы возбуждения, необходимо удалять испытательные сигналы из датчиков измерителя. В одном из вариантов осуществления, это производится с помощью набора узкополосных режекторных фильтров, настроенных на точные частоты испытательных сигналов.
Блок 1208 АЧХ испытательных сигналов по Фиг.11 выполняет демодуляцию. Сигналы датчиков перемещений и возбуждения демодулируют на каждой из пяти входных частот, четырех, сформированных частотами испытательных сигналов, и частоте возбуждения. После выполнения смешанной демодуляции с использованием синусных и косинусных базисов, действительную и мнимую составляющую каждого сигнала прореживают до более низкой частоты и отфильтровывают фильтром нижних частот до 0,4 Гц. Необходимо, чтобы эти сигналы были беспримесными в этой области, так как любая спектральная составляющая в пределах 0,4 Гц испытательного сигнала не будет подавляться и будет появляться в выходном сигнале. Комплексные коэффициенты для датчиков перемещений и тока возбуждения на каждой частоте затем используют для оценки АЧХ на такой частоте. Спектры мощности усредняют по некоторому количеству отсчетов, и выводится оценка АЧХ на более низкой частоте выборки.
Измерительная электроника и способы согласно изобретению могут применяться согласно любому из вариантов осуществления, для того чтобы обеспечивать некоторые преимущества, если требуется. Изобретение предусматривает параметр (K) жесткости, который по существу зависим от жесткости расходомерной трубки расходомера. Изобретение предусматривает параметр (K) жесткости, который не полагается на хранимые или подвергаемые выборке калибровочные значения для формирования. Изобретение предусматривает параметр (K) жесткости, который получен исключительно по колебательным ответным сигналам расходомера. Подобным образом, изобретение предоставляет параметр (M) массы и параметр (C) демпфирования от колебательного ответного сигнала.
Изобретение предусматривает последовательность операций детектирования/калибровки жесткости без необходимости в последовательности операций заводской калибровки. Изобретение может выполнять последовательность операций калибровки жесткости/FCF на месте. Изобретение может выполнять последовательность операций калибровки жесткости/FCF в любое время. Изобретение может выполнять последовательность операций калибровки жесткости/FCF без необходимости в установке калибровочных испытаний и/или известных проточных материалах. Изобретение может выполнять последовательность операций калибровки жесткости/FCF, которая определяет изменения в жесткости расходомера с течением времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ РАСХОДОМЕР, А ТАКЖЕ СПОСОБЫ И ДИАГНОСТИКА ДЛЯ ПОВЕРКИ ИЗМЕРИТЕЛЯ | 2014 |
|
RU2628661C1 |
| ЭЛЕКТРОННЫЙ ИЗМЕРИТЕЛЬ И СПОСОБЫ ВЕРИФИКАЦИОННОЙ ДИАГНОСТИКИ РАСХОДОМЕРА | 2018 |
|
RU2766256C1 |
| ВИБРАЦИОННЫЙ РАСХОДОМЕР И СПОСОБ ПРОВЕРКИ ИЗМЕРИТЕЛЯ | 2014 |
|
RU2617875C1 |
| ИЗМЕРИТЕЛЬНАЯ ЭЛЕКТРОНИКА И СПОСОБЫ ДЛЯ ГЕНЕРИРОВАНИЯ СИГНАЛА ВОЗБУЖДЕНИЯ ДЛЯ ВИБРАЦИОННОГО РАСХОДОМЕРА | 2006 |
|
RU2376556C1 |
| ОПРЕДЕЛЕНИЕ ДЕМПФИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО УЗЛА | 2018 |
|
RU2766276C1 |
| ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИКИ ЗАТУХАНИЯ ИЗМЕРИТЕЛЬНОГО УЗЛА | 2018 |
|
RU2770749C1 |
| КОРИОЛИСОВЫЙ РАСХОДОМЕР И СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОТОКА | 2005 |
|
RU2371679C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОГО, КОГДА ПРОВЕРЯТЬ КОЭФФИЦИЕНТ ЖЕСТКОСТИ РАСХОДОМЕРА | 2018 |
|
RU2759828C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРА ФЛЮИДА В ВИБРАЦИОННОМ ИЗМЕРИТЕЛЕ | 2008 |
|
RU2502962C2 |
| ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБЫ ДИАГНОСТИКИ РАСХОДОМЕРА КОРИОЛИСА | 2003 |
|
RU2324150C2 |





Изобретение может быть использовано в массовом расходомере Кориолиса или вибрационном трубчатом плотномере. Измерительная электроника (20) расходомера включает в себя интерфейс (201) для приема колебательного ответного сигнала от датчиков расходомера на его вибрацию на резонансной частоте и систему (203) обработки данных, сконфигурированную для приема колебательного ответного сигнала от интерфейса (201), определения частоты (ω0) ответного сигнала, напряжения (V) ответного сигнала и тока (I) возбуждения ответного сигнала, измерения характеристики (ζ) затухания расходомера и определения параметра (К) жесткости по частоте (ω0), напряжению (V), току (I) возбуждения и характеристике (ζ) затухания. В варианте выполнения система (203) обработки данных сконфигурирована для приема по меньшей мере трех колебательных ответных сигналов из интерфейса (201), формирования амплитудно-частотной характеристики с вычетом в полюсе по колебательным ответным сигналам и определения параметра (К) жесткости по амплитудно-частотной характеристике с вычетом в полюсе. При этом три колебательных сигнала включают в себя ответный сигнал основной частоты и два или более ответных сигнала неосновной частоты на по меньшей мере один тон выше и один тон ниже ответного сигнала. Изобретение повышает точность измерения параметров потока благодаря обеспечению возможности поверки расходомера на месте его установки в трубопроводе. 6 н. и 50 з.п. ф-лы, 12 ил.
1. Измерительная электроника (20) для расходомера (5), измерительная электроника (20) содержит интерфейс (201) для приема колебательного ответного сигнала от расходомера (5), причем колебательный ответный сигнал содержит ответный сигнал на вибрацию расходомера (5) на, по существу, постоянной резонансной частоте, и систему (203) обработки данных, связанную с интерфейсом (201), причем измерительная электроника (20) дополнительно содержит систему (203) обработки данных, сконфигурированную для приема колебательного ответного сигнала от интерфейса (201), определения частоты (ω0) колебательного ответного сигнала, определения напряжения (V) ответного сигнала и тока (I) возбуждения колебательного ответного сигнала, измерения характеристики (ξ) затухания расходомера (5) и определения параметра (К) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ξ) затухания.
2. Измерительная электроника (20) по п.1, в которой измерение характеристики (ξ) затухания дополнительно содержит предоставление колебательному ответному сигналу расходомера (5) возможности затухать вплоть до предопределенной базы отсчета колебаний.
3. Измерительная электроника (20) по п.1, в которой система (203) обработки данных является дополнительно сконфигурированной для измерения характеристики (ξ) затухания снятием возбуждения расходомера (5) и предоставлением колебательному ответному сигналу расходомера (5) возможности затухать вплоть до предопределенной базы отсчета колебаний наряду с измерением характеристики затухания.
4. Измерительная электроника (20) по п.1, в которой параметр (К) жесткости является K=(I·BLPO·BLDR·ω0)/2ξV,
где BLPO, BLDR - коэффициенты чувствительности, соответственно, датчика и возбудителя расходомера.
5. Способ для определения параметра (К) жесткости расходомера, способ содержит этапы, на которых принимают колебательный ответный сигнал от расходомера, причем колебательный ответный сигнал содержит ответный сигнал на вибрацию расходомера на, по существу, резонансной частоте, и определяют частоту (ω0) колебательного ответного сигнала, причем способ дополнительно содержит этапы, на которых
определяют напряжение (V) ответного сигнала и ток (I) возбуждения колебательного ответного сигнала;
измеряют характеристику (ξ) затухания расходомера; и
определяют параметр (К) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ξ) затухания.
6. Способ по п.5, в котором измерение характеристики (ξ) затухания дополнительно содержит этап, на котором предоставляют колебательному ответному сигналу расходомера (5) возможность затухать вплоть до предопределенной базы отсчета колебаний.
7. Способ по п.5, в котором измерение характеристики (ξ) затухания дополнительно содержит этап, на котором
снимают возбуждение расходомера; и
предоставляют колебательному ответному сигналу расходомера возможность затухать вплоть до предопределенной базы отсчета колебаний наряду с тем, что измеряют характеристику затухания.
8. Способ по п.5, в котором параметр (К) жесткости является K=(I·BLPO·BLDR·ω0)/2ξV.
9. Способ для определения изменения (ΔК) жесткости расходомера, способ содержит этапы, на которых принимают колебательный ответный сигнал от расходомера, причем колебательный ответный сигнал содержит ответный сигнал на вибрацию расходомера на, по существу, резонансной частоте, и определяют частоту (ω0) колебательного ответного сигнала, причем способ дополнительно содержит этапы, на которых
определяют напряжение (V) ответного сигнала и ток (I) возбуждения колебательного ответного сигнала;
измеряют характеристику (ξ) затухания расходомера;
определяют параметр (К) жесткости по частоте (ω0), напряжению (V) ответного сигнала, току (I) возбуждения и характеристике (ξ) затухания;
принимают второй колебательный ответный сигнал от расходомера во второй момент t2 времени;
генерируют вторую характеристику (К2) жесткости по второму колебательному ответному сигналу;
сравнивают вторую характеристику (К2) жесткости с параметром (К) жесткости; и
регистрируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более, чем на предопределенный допуск.
10. Способ по п.9, дополнительно состоящий в том, что регистрируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более, чем на предопределенный допуск по жесткости.
11. Способ по п.9, дополнительно содержащий этап, на котором количественно определяют изменение (ΔК) жесткости из сравнения.
12. Способ по п.9, в котором измерение характеристики (ξ) затухания дополнительно содержит этап, на котором предоставляют колебательному ответному сигналу расходомера возможность затухать вплоть до предопределенной базы отсчета колебаний.
13. Способ по п.9, в котором измерение характеристики (ξ) затухания дополнительно содержит этапы, на которых
снимают возбуждение расходомера; и
предоставляют колебательному ответному сигналу расходомера возможность затухать вплоть до предопределенной базы отсчета колебаний наряду с тем, что измеряют характеристику затухания.
14. Способ по п.9, в котором параметр (К) жесткости является K=(I·BLPO·BLDR·ω0)/2ξV.
15. Способ по п.9, в котором формирование второй характеристики (К2) жесткости по второму колебательному ответному сигналу содержит этап, на котором формируют вторую характеристику (К2) жесткости по второй частоте, второму напряжению ответного сигнала, второму току возбуждения и второй характеристике демпфирования.
16. Измерительная электроника (20) для расходомера (5), измерительная электроника (20) содержит интерфейс (201) для приема трех или более колебательных ответных сигналов от расходомера (5), причем три или более колебательных ответных сигнала включают в себя ответный сигнал, по существу, основной частоты и два или более ответных сигнала неосновной частоты, и систему (203) обработки данных, связанную с интерфейсом (201), причем измерительная электроника (20) дополнительно содержит
систему (203) обработки данных, являющуюся сконфигурированной для приема трех или более колебательных ответных сигналов из интерфейса (201), формирования амплитудно-частотной характеристики с вычетом (R) в полюсе (λ) по трем или более колебательным ответным сигналам, и определения, по меньшей мере, параметра (К) жесткости по амплитудно-частотной характеристики с вычетом в полюсе.
17. Измерительная электроника (20) по п.16, в которой система (203) обработки данных дополнительно сконфигурирована для определения параметра (С) демпфирования по амплитудно-частотной характеристике с вычетом в полюсе.
18. Измерительная электроника (20) по п.16, в которой система (203) обработки данных дополнительно сконфигурирована для определения параметра (М) массы по амплитудно-частотной характеристике с вычетом в полюсе.
19. Измерительная электроника (20) по п.16, в которой система (203) обработки данных дополнительно сконфигурирована для вычисления полюса (λ), левого вычета (RL) и правого вычета (RR) по амплитудно-частотной характеристике с вычетом в полюсе.
20. Измерительная электроника (20) по п.16, в которой три или более колебательных ответных сигналов содержат, по меньшей мере, один тон выше ответного сигнала основной частоты и, по меньшей мере, один тон ниже ответного сигнала основной частоты.
21. Измерительная электроника (20) по п.16, в которой три или более колебательных ответных сигнала содержат, по меньшей мере, два тона выше ответного сигнала основной частоты и, по меньшей мере, два тона ниже ответного сигнала основной частоты.
22. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка.
23. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся  , где
, где
ω - угловая частота возбуждения, j - квадратный корень из -1.
24. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся , и при этом параметр (К) жесткости, параметр (С) демпфирования и параметр (М) массы определяются согласно уравнениям M=l/2jRωd, К=(ωn)2М и С=2ξωnМ, где
ωd - демпфированная собственная частота, ωn - собственная/резонансная частота.
25. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка.
26. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, являющуюся 
27. Измерительная электроника (20) по п.16, в которой амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является  , и при этом параметр (К) жесткости определяется согласно
, и при этом параметр (К) жесткости определяется согласно  , параметр (М) массы определяется согласно М=К/(ωn)2, и параметр (С) демпфирования определяется согласно
, параметр (М) массы определяется согласно М=К/(ωn)2, и параметр (С) демпфирования определяется согласно  .
.
28. Способ для определения параметра (К) жесткости расходомера, способ содержит этапы, на которых
принимают три или более колебательных ответных сигнала, причем три или более колебательных ответных сигнала включают в себя ответный сигнал, по существу, основной частоты и два или более ответных сигнала неосновной частоты;
формируют амплитудно-частотную характеристику с вычетом в полюсе по трем или более колебательным ответным сигналам; и
определяют, по меньшей мере, параметр (К) жесткости по амплитудно-частотной характеристике с вычетом в полюсе.
29. Способ по п.28, дополнительно содержащий этап, на котором определяют параметр (С) демпфирования по амплитудно-частотной характеристике с вычетом в полюсе.
30. Способ по п.28, дополнительно содержащий этап, на котором определяют параметр (М) массы по амплитудно-частотной характеристике с вычетом в полюсе.
31. Способ по п.28, дополнительно содержащий этап, на котором вычисляют полюс (λ), левый вычет (RL) и правый вычет (RR) по амплитудно-частотной характеристике с вычетом в полюсе.
32. Способ по п.28, в котором три или более колебательных ответных сигнала содержат, по меньшей мере, один тон выше ответного сигнала основной частоты и, по меньшей мере, один тон ниже ответного сигнала основной частоты.
33. Способ по п.28, в котором три или более колебательных ответных сигнала содержат, по меньшей мере, два тона выше ответного сигнала основной частоты и, по меньшей мере, два тона ниже ответного сигнала основной частоты.
34. Способ п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка.
35. Способ п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся .
36. Способ по п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся , и при этом параметр (К) жесткости, параметр (С) демпфирования и параметр (М) массы определяются согласно уравнениям M=1/2jRωd, К=(ωn)2M и С=2ξωnМ.
37. Способ п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка.
38. Способ п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, являющуюся .
39. Способ по п.28, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является , при этом параметр (К) жесткости определяется согласно , параметр (М) массы определяется согласно М=К/(ωn)2, и параметр (С) демпфирования определяется согласно  .
.
40. Способ по п.28, дополнительно содержащий этапы, на которых
принимают второй набор из трех или более колебательных ответных сигналов от расходомера во второй момент t2 времени;
генерируют вторую характеристику (К2) жесткости по второму набору из трех или более колебательных ответных сигналов;
сравнивают вторую характеристику (К2) жесткости с параметром (К) жесткости; и
регистрируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более, чем на предопределенный допуск.
41. Способ по п.40, дополнительно содержащий этап, на котором детектируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более, чем на предопределенный допуск по жесткости.
42. Способ по п.40, дополнительно содержащий этап, на котором количественно определяют изменение (ΔК) жесткости из сравнения К и К2.
43. Способ для определения изменения (ΔК) жесткости в расходомере, содержащий этапы, на которых
принимают три или более колебательных ответных сигнала, причем три или более колебательных ответных сигнала включают в себя ответный сигнал, по существу, основной частоты и два или более ответных сигнала неосновной частоты;
генерируют амплитудно-частотную характеристику с вычетом в полюсе по трем или более колебательным ответным сигналам;
определяют, по меньшей мере, параметр (К) жесткости по амплитудно-частотной характеристике с вычетом в полюсе;
принимают второй набор из трех или более колебательных ответных сигналов от расходомера во второй момент t2 времени;
генерируют вторую характеристику (К2) жесткости по второму набору из трех или более колебательных ответных сигналов;
сравнивают вторую характеристику (К2) жесткости с параметром (К) жесткости; и
детектируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более чем на предопределенный допуск.
44. Способ по п.43, дополнительно содержащий этап, на котором детектируют изменение (ΔК) жесткости, если вторая характеристика (К2) жесткости отличается от параметра (К) жесткости более, чем на предопределенный допуск по жесткости.
45. Способ по п.43, дополнительно содержащий этап, на котором количественно определяют изменение (ΔК) жесткости из сравнения К и К2.
46. Способ по п.43, в котором определение дополнительно содержит этап, на котором определяют параметр (С) демпфирования по амплитудно-частотной характеристике с вычетом в полюсе.
47. Способ по п.43, в котором определение дополнительно содержит этап, на котором определяют параметр (М) массы по амплитудно-частотной характеристике с вычетом в полюсе.
48. Способ по п.43, в котором определение дополнительно содержит этап, на котором вычисляют полюс (λ), левый вычет (RL) и правый вычет (RR) по амплитудно-частотной характеристике с вычетом в полюсе.
49. Способ по п.43, в котором три или более колебательных ответных сигнала содержат, по меньшей мере, один тон выше ответного сигнала основной частоты и, по меньшей мере, один тон ниже ответного сигнала основной частоты.
50. Способ по п.43, в котором три или более колебательных ответных сигнала содержат, по меньшей мере, два тона выше ответного сигнала основной частоты и, по меньшей мере, два тона ниже ответного сигнала основной частоты.
51. Способ п.43, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка.
52. Способ п.43, причем амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся .
53. Способ п.43, причем амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе первого порядка, являющуюся , и при этом параметр (К) жесткости, параметр (С) демпфирования и параметр (М) массы определяют согласно уравнениям M=1/2jRωd, K=(ωn)2М и С=2ξωnМ.
54. Способ п.43, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка.
55. Способ п.43, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, являющуюся 
56. Способ по п.43, в котором амплитудно-частотная характеристика с вычетом в полюсе содержит амплитудно-частотную характеристику с вычетом в полюсе второго порядка, которая является , при этом параметр (К) жесткости определяют согласно , параметр (М) массы определяют согласно М=К/(ωn)2, и параметр (С) демпфирования определяют согласно  .
.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ОКОННЫЙ БЛОК-СТЕКЛОПАКЕТ С ТРОЙНЫМ СЕРЕБРЯНЫМ ПОКРЫТИЕМ И ДИЭЛЕКТРИЧЕСКИМ ПОКРЫТИЕМ НА ПРОТИВОПОЛОЖНЫХ СТОРОНАХ СТЕКЛЯННОЙ ПОДЛОЖКИ | 2018 |
|
RU2754898C2 |
| US 4920787 А, 01.05.1990 | |||
| СПОСОБЫ И УСТРОЙСТВО, СООТВЕТСТВУЮЩИЕ ДАТЧИКАМ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ВИБРИРУЮЩИХ ТРУБОПРОВОДОВ | 2000 |
|
RU2247331C2 |

