Изобретение относится к контрольно-измерительной технике и может быть использовано для бесконтактного удаленного измерения и контроля положения рабочего органа в замкнутом пространстве (например, внутри реактора).
Общеизвестны оптические устройства для бесконтактного контроля наличия и измерения уровня твердых веществ и жидкостей в замкнутых объемах.
К подобным системам можно отнести, например, волоконно-оптическую сенсорную систему для жидкости «Fiber optic liquid sensing system», описанную в патенте US №5684296, МПК G01H 15/06, опубл. 1997 г. и содержащую оптический датчик, модуль управления и волоконно-оптический кабель, соединяющий оптический датчик с модулем управления. Оптический датчик содержит световой отражатель. Корпус оптического датчика имеет отверстия для прохождения жидкости внутрь датчика. Волоконно-оптический кабель содержит передающее оптическое волокно и приемное оптическое волокно. В состав модуля управления входят: излучатель света, фотодатчик, компаратор, сухой и влажный индикаторы и контроллер включения/выключения. Работа системы основана на излучении модулем управления света и приема света, отраженного от светового отражателя. При наличии жидкости внутри оптического датчика световой сигнал ослабляется и присутствии жидкости регистрируется влажным индикатором. Отсутствие жидкости не вызывает ослабления светового сигнала и данное состояние регистрируется сухим индикатором.
Сходными существенными признаками заявленной и вышеупомянутой системы являются: модуль управления, содержащий излучатель света и фотодатчик, волоконно-оптический кабель, оптический датчик и световой отражатель.
Недостатком системы является отсутствие возможности контроля положения рабочего органа внутри замкнутого пространства. Система не предназначена для измерения расстояния при прохождении луча света от излучателя до светового отражателя.
Известен «Указатель уровня поверхности жидкости в сосуде на основе сравнения падающего и отраженного лучей» (Liquid level gauge comparing moldulations of incident and reflected loser beams), описанный в патенте US №5194747, МПК G01N 15/06, опубл. в 1993 г. Данное устройство состоит из оптического блока, блока управления и средств передачи, в качестве которых используются коаксиальный и волоконно-оптический кабели. Оптический блок содержит коллимирующую оптику передатчика, фокусирующую оптику приемника и фотодиод. Блок управления содержит модулятор, фазовый детектор, схему обработки, дисплей уровня и излучающий лазерный диод. Работа устройства основана на излучении лазерным диодом модулированного светового сигнала и приема светового сигнала от светоотражающей границы жидкости в сосуде. Световой сигнал передается с помощью волоконно-оптического кабеля к оптическому элементу, где он направляется через коллимирующую оптику передатчика на границу жидкости. Отраженный световой сигнал через фокусирующую оптику поступает на фотодиод, выход которого посредством коаксиального кабеля соединен с блоком управления, который включает в себя фазовый детектор, предназначенный для сравнения фаз сигналов модуляции и определения уровня жидкости в сосуде.
Сходными существенными признаками данного и заявленного устройства являются: оптический блок, блок управления, волоконно-оптический кабель, коллимирующая оптика передатчика.
Недостатком устройства является наличие коаксиального кабеля связи между оптическим блоком и блоком управления, что не обеспечивает взрывобезопасность. Коаксиальный кабель связи по сравнению с волоконно-оптическим кабелем обладает меньшей помехозащищенностью от электромагнитных наводок, что снижает помехозащищенность устройства при расположении блока управления от оптического блока на значительном расстоянии друг от друга. Кроме того, использование двух средств передачи (коаксиального и волоконно-оптического кабелей) при удаленном контроле не является экономически целесообразным из-за принципиальной возможности использования только одного волоконно-оптического кабеля.
Наиболее близким по технической сущности к заявленному изобретению является «Способ и устройство для оптического зондирования уровня ажитированной поверхности жидкости» (Method and apparatus for optical level sensing of agitated fluid surfaces), описанные в патенте US №7635854, МПК G01N 15/06, G01F 23/00, опубл. 2009 г. Устройство, описанное в патенте, содержит резервуар с установленным на нем оптическим блоком, светопропускные средства (два оптических волокна), электронный блок, который удален от оптического блока на определенное расстояние, пользовательский интерфейс и экранный монитор. Оптический блок содержит канал излучения с линзой для коллимации света, канал приема с фокусирующей линзой и оптическим фильтром, и защитное оптическое окно. Электронный блок содержит модуль управления и обработки информации, модуль оптического излучателя, модуль оптического приема, аналого-цифровой преобразователь (АЦП) и выход коммуникационного интерфейса.
Общими существенными признаками с заявляемым решением являются: резервуар (корпус замкнутого пространства), оптический блок, оптическое волокно, электронный блок (для управления и обработки информации), линза для коллимации света (коллиматор), оптическое окно, модуль управления и обработки информации (процессор), модуль оптического излучателя (оптический передатчик), модуль оптического приема (оптический приемник), (АЦП) и выход коммуникационного интерфейса (линия интерфейса).
Недостатком устройства является отсутствие возможности контроля положения твердотельного рабочего органа. Другим недостатком устройства является использование двух волоконно-оптических кабелей при удаленном контроле уровня жидкости, что не является экономически целесообразным из-за принципиальной возможности использования только одного волоконно-оптического кабеля.
Целью настоящего изобретения является обеспечение удаленного контроля положения рабочего органа, выполненного в виде твердотельной конструкции и расположенного внутри замкнутого пространства, с возможностью использования одного оптического волокна.
Для достижения этой цели в известное техническое решение введены новые существенные признаки, функциональные элементы и связи.
Эта цель достигнута в предложенной интеллектуальной системе для удаленного контроля положения рабочего органа внутри замкнутого пространства, которая содержит корпус замкнутого пространства, расположенный в агрессивной среде, с установленным на нем оптическим блоком, содержащим коллиматор и оптическое окно, электронный блок для управления и обработки информации, территориально удаленный от корпуса замкнутого пространства, в состав которого входят процессор, оптический передатчик, оптический приемник и аналого-цифровой преобразователь (АЦП), причем первый выход процессора подключен к оптическому передатчику, второй выход процессора является выходом электронного блока для управления и обработки информации, выполненного в виде линии интерфейса для связи с внешними устройствами, выход оптического приемника подключен ко входу АЦП, выход которого подключен ко входу процессора, внутри корпуса замкнутого пространства расположен рабочий орган с закрепленным на нем ретроотражателем, между первым входом/выходом коллиматора оптического блока и ретроотражателем формируется коллимированный световой поток, проходящий сквозь оптическое окно оптического блока и состоящий из падающих и отраженных от ретро-отражателя лучей света, второй вход/выход коллиматора является входом/выходом оптического блока, в электронный блок для управления и обработки информации введен оптический циркулятор, вход которого подключен к выходу оптического передатчика, а выход подключен ко входу оптического приемника, вход/выход оптического циркулятора является входом/выходом электронного блока для управления и обработки информации, вход/выход оптического блока связан со входом/выходом электронного блока для управления и обработки информации посредством оптического волокна, проходящего через раздел агрессивной и безопасной сред и выполненного с возможностью обеспечения взрывобезопасности.
Сущность изобретения поясняется фиг. 1-2, на которых изображено следующее.
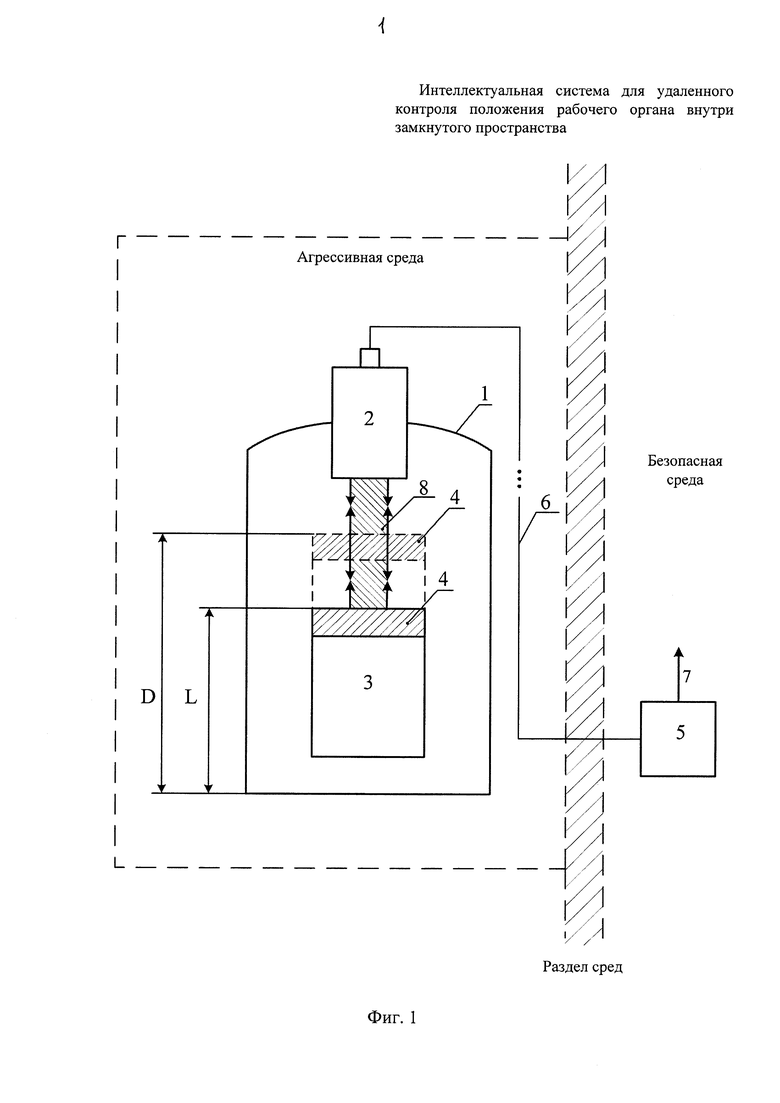
На фиг. 1 приведена структурная схема предлагаемой системы, где введены обозначения: корпус замкнутого пространства - 1, оптический блок - 2, рабочий орган - 3, ретроотражатель - 4, электронный блок для управления и обработки информации - 5, оптическое волокно - 6, линия интерфейса - 7, коллимированный световой поток - 8. На фиг. 1 показаны минимальный L и максимальный D уровни положения рабочего органа 3 внутри корпуса замкнутого пространства 1.
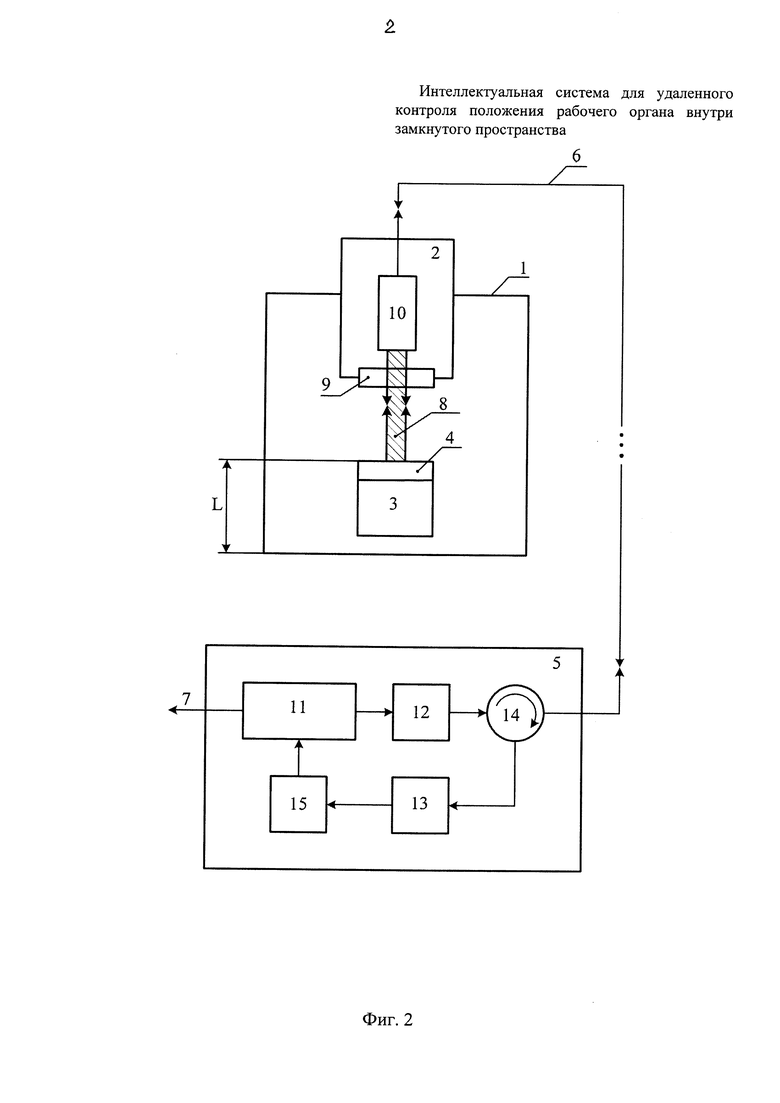
На фиг. 2 приведена функциональная схема предлагаемой системы, где дополнительно к фиг. 1 введены обозначения: оптическое окно - 9, коллиматор - 10, процессор - 11, оптический передатчик - 12, оптический приемник - 13, оптический циркулятор - 14, АЦП - 15. На фиг. 2 показан (к примеру) один из уровней (L) положения рабочего органа 3.
Предложенная система (фиг. 1-2) работает следующим образом.
Система состоит из трех частей - корпуса замкнутого пространства 1 с установленным на нем оптическим блоком 2, электронного блока для управления и обработки информации 5 с линией интерфейса 7 и средства связи, в качестве которого используется оптическое волокно 6. В качестве корпуса замкнутого пространства могут быть различные конструкции, например, резервуар, цистерна, емкость для хранения горюче-смазочных веществ, реактор, электроплавильная печь и т.п. Внутри корпуса замкнутого пространства 1 расположен рабочий орган 3, который может изменять свое положение в пространстве от минимального L до максимального D. В качестве рабочего органа 3 может быть твердый предмет: электрод, графитовый стержень, заслонка, решетка, кронштейн и т.п. Корпус замкнутого пространства 1 находится в агрессивной среде, характеризуемой опасными для человека состояниями. Это могут быть экстремальные температуры (отрицательные и положительные), ядовитые воздушно-капельные смеси, высокое или низкое давление, наличие опасных химических или биологических веществ, радиоактивное излучение, сильное электромагнитное поле, взрывоопасная среда и т.п. Агрессивная среда и безопасная для человека среда разделяются друг от друга разделом сред, граница которого показана на фиг. 1. Электронный блок для управления и обработки информации 5 с линией интерфейса 7 находятся в безопасной для человека среде. Связь электронного блока для управления и обработки информации 5 с корпусом замкнутого пространства 1 осуществляется посредством оптического волокна 6, устойчивого к свойствам агрессивной среды. Оптическое волокно 6 может быть представлено в виде волоконно-оптического кабеля с защищенной от агрессивной среды оболочкой (на фиг. 1-2 не показаны). Контроль положения рабочего органа 3 внутри замкнутого пространства осуществляется с помощью коллимированного светового потока 8, который создается между коллиматором 10 оптического блока 2 и ретроотражателем 4, закрепленным на рабочем органе 3. В качестве ретроотражателя 4 может использоваться, например, набор оптических уголковых отражателей. Коллимированный световой поток 8, излучаемый коллиматором 10, проходит через оптическое окно 9 оптического блока 2, падает на ретроотражатель 4 и отражается от него в обратную сторону. Коллиматор 10 связан с оптическим волокном 6, через которого на него подается модулированный световой поток, направляемый от электронного блока 5. По оптическому волокну 6 обратно в электронный блок 5 передается отраженный световой поток, содержащий информацию о положении рабочего органа 3. Электронный блок для управления и обработки информации 5 (см. фиг. 2) содержит процессор 11, оптический передатчик 12, оптический приемник 13, оптический циркулятор 14 и АЦП 15. Оптический передатчик 12 под управлением процессора 11 обеспечивает формирование и излучение модулированного светового потока, который, проходя через оптический циркулятор 14, направляется в оптическое волокно 6. Отраженный световой поток из оптического волокна 6 через оптический циркулятор 14 поступает в оптический приемник 13, и далее через АЦП 15 в процессор 11. Оптический циркулятор 14 предназначен для разделения световых потоков с одной стороны (внутри электронного блока 5) и объединения световых потоков в оптическом волокне 6. АЦП 15 преобразует аналоговый сигнал с выхода оптического приемника 13 в цифровой сигнал, поступающий на вход процессора 11. Для обеспечения контроля положения рабочего органа внутри замкнутого пространства в предлагаемой системе используется фазовый метод измерения, основанный на измерении задержки фазы излучаемого и отраженного сигналов. Процессор 11 выполнен с возможностью обеспечения следующих функций:
- модуляция излучаемого сигнала;
- измерение задержки фазы излучаемого и отраженного сигналов;
- вычисление уровня положения рабочего органа (от L до D);
- метрологическая калибровка;
- диагностический контроль (самоконтроль) работоспособности системы;
- обеспечение связи с внешними устройствами посредством линии интерфейса;
- получение информации от метеостанции или от датчиков физических величин (при необходимости);
- получение управляющей информации и передача данных измерения;
- корректировка алгоритмов обработки информации в связи с изменениями условий среды;
- корректировка алгоритмов обработки информации в зависимости от положения рабочего органа (устранение нелинейности в измерениях);
- корректировка алгоритмов обработки информации, связанная с временем эксплуатации системы (старение и износ механизмов);
- сигнализация о критических положениях рабочего органа.
Интеллектуальность системы обеспечивается самостоятельностью принятия решений при выполнении вышеизложенных функций, так как доступ управляющего персонала внутрь замкнутого пространства невозможен или значительно ограничен. Для обеспечения интеллектуальности системы процессор 11 выполнен с возможностью реализации алгоритмов функционирования в виде нейросетевых алгоритмов.
Использование оптического волокна, проходящего через границу раздела двух сред (агрессивной и безопасной), позволяет обеспечить электрическую взрывобезопасность системы, так как оптическое волокно является высококачественным и надежным электрическим изолятором. Кроме того, низкий уровень затухания светового сигнала в оптическом волокне позволяет использовать его для удаленного контроля объекта, находящегося на удалении в пределах до нескольких километров.
Введенные в известное устройство дополнительные признаки и функциональные связи позволяют придать предлагаемой системе новые существенные свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И РАСХОДА ЭЛЕКТРОДА | 2022 |
|
RU2784312C1 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| Инфракрасная активная система для контроля протяженных рубежей охраны | 2019 |
|
RU2722927C1 |
| Инфракрасная активная система тревожной сигнализации с защитой от электромагнитных помех высокой энергии | 2019 |
|
RU2712421C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| Устройство для тревожной сигнализации с сервоприводами передающего и приемного блоков | 2017 |
|
RU2665866C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| ВЗРЫВОБЕЗОПАСНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ УРОВНЕМЕР | 2018 |
|
RU2697033C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| Способ обнаружения нарушителя на контролируемом рубеже | 2019 |
|
RU2719505C1 |
Изобретение относится к контрольно-измерительной технике, в частности к устройствам для бесконтактного контроля наличия и измерения уровня твердых веществ и жидкостей в замкнутых объемах. Техническим результатом изобретения является обеспечение бесконтактного удаленного измерения и контроля положения рабочего органа внутри замкнутого пространства (например, внутри реактора). Система содержит корпус замкнутого пространства, расположенный в агрессивной среде, с установленным на нем оптическим блоком и электронный блок для управления и обработки информации, связанный с оптическим блоком посредством оптического волокна, проходящего через раздел агрессивной и безопасной сред и выполненного с возможностью обеспечения взрывобезопасности. Внутри корпуса замкнутого пространства расположен рабочий орган с закрепленным на нем ретроотражателем. В состав электронного блока для управления и обработки информации входят: процессор, оптический передатчик, оптический приемник, аналого-цифровой преобразователь и оптический циркулятор. Между коллиматором оптического блока и ретроотражателем формируется коллимированный световой поток, состоящий из падающих и отраженных от ретроотражателя лучей света, который обеспечивает процесс измерения и контроля положения рабочего органа внутри замкнутого пространства. 2 ил.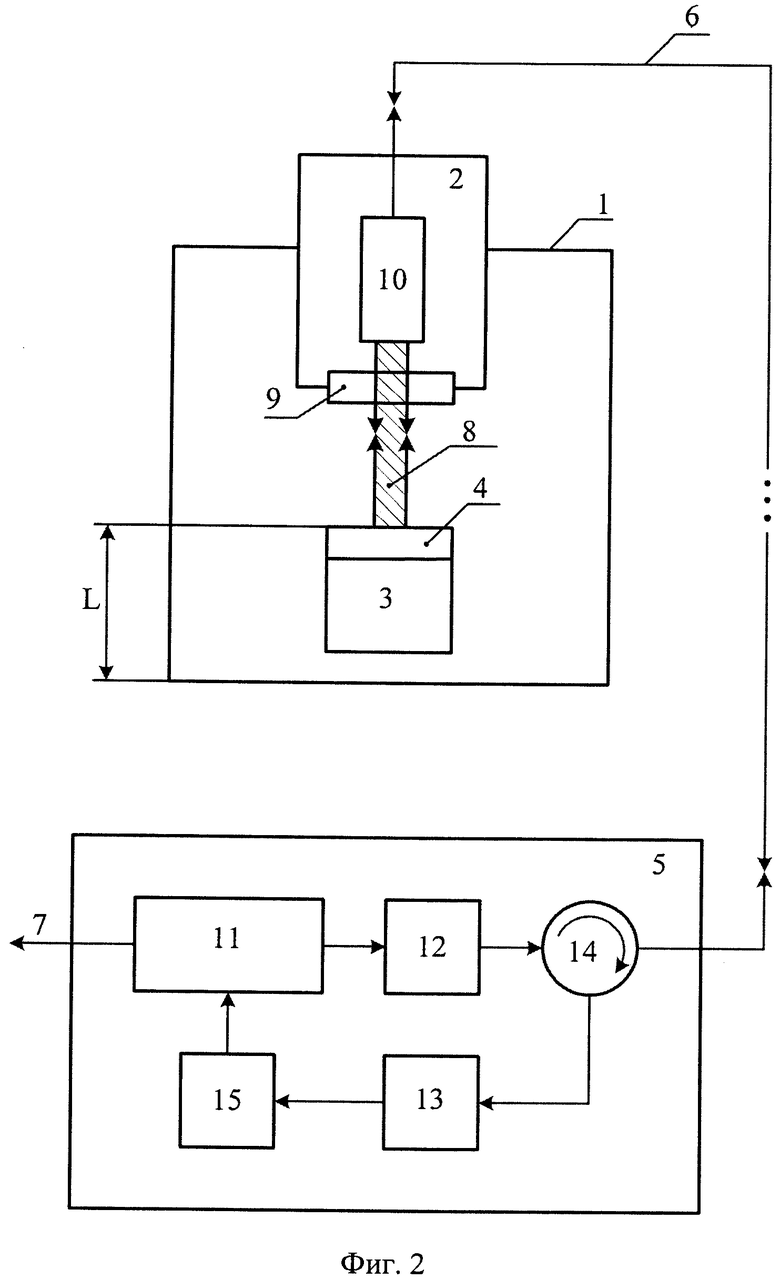
Интеллектуальная система для удаленного контроля положения рабочего органа внутри замкнутого пространства, содержащая корпус замкнутого пространства, расположенный в агрессивной среде, с установленным на нем оптическим блоком, содержащим коллиматор и оптическое окно, электронный блок для управления и обработки информации, территориально удаленный от корпуса замкнутого пространства, в состав которого входят процессор, оптический передатчик, оптический приемник и аналого-цифровой преобразователь (АЦП), причем первый выход процессора подключен к оптическому передатчику, второй выход процессора является выходом электронного блока для управления и обработки информации, выполненного в виде линии интерфейса для связи с внешними устройствами, выход оптического приемника подключен ко входу АЦП, выход которого подключен ко входу процессора, отличающаяся тем, что внутри корпуса замкнутого пространства расположен рабочий орган с закрепленным на нем ретроотражателем, между первым входом/выходом коллиматора оптического блока и ретроотражателем формируется коллимированный световой поток, проходящий сквозь оптическое окно оптического блока и состоящий из падающих и отраженных от ретроотражателя лучей света, второй вход/выход коллиматора является входом/выходом оптического блока, в электронный блок для управления и обработки информации введен оптический циркулятор, вход которого подключен к выходу оптического передатчика, а выход подключен ко входу оптического приемника, вход/выход оптического циркулятора является входом/выходом электронного блока для управления и обработки информации, вход/выход оптического блока связан со входом/выходом электронного блока для управления и обработки информации посредством оптического волокна, проходящего через раздел агрессивной и безопасной сред и выполненного с возможностью обеспечения взрывобезопасности.
| US 7635854 B1, 22.12.2009 | |||
| US 5438420 A1, 01.08.1995 | |||
| US 5194747 A1, 16.03.1993 | |||
| ДАТЧИК УРОВНЯ ЖИДКОСТИ | 0 |
|
SU246107A1 |
| УЛЬТРАЗВУКОВОЙ ВОЛНОВОДНЫЙ УРОВНЕМЕР ЖИДКОСТИ | 2015 |
|
RU2580907C1 |

