ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к области вычислительной техники, в частности к способу и системе управления стационарной камерой машинного зрения, предназначенной для фиксации транспортных средств (ТС).
УРОВЕНЬ ТЕХНИКИ
Для камер машинного зрения основной проблемой является тот факт, что в сложных условиях освещения, например на ярком солнце или ночью при использовании ИК подсветки, номер машины переэкспонирован или недоэкспонирован, так как алгоритм управления экспонированием камеры анализирует кадр в целом, а автомобильный номер занимают небольшую часть кадра.
Из уровня техники известна система управления цифровой камерой (WO 2010002379, 07.01.2010), реализующая управление экспозицией камеры, фиксирующей ТС, с помощью модели поведения (работы) камеры, подстраивающейся под изменение таких параметров, влияющих на зону видимости камеры, как солнечный свет, положение теней и блики ТС.
Известное решение не обеспечивает достаточной точности распознавания ТС в условиях с динамическим изменением освещения, поскольку не предполагает адаптивную настройку по различным режимам работы камеры и калибровку по областям интереса захвата изображения (области государственных регистрационных знаков (ГРЗ)).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является создание способа и реализующей его системы для управления стационарной камерой видеонаблюдения, которые устраняют недостаток, заключающийся в снижении точности распознавания объектов в зонах с динамическим изменением параметров освещенности.
Техническим результатом является повышение точности распознавания объектов.
Заявленный технический результат достигается за счет способа управления стационарной камерой машинного зрения, фиксирующей ТС, содержащего этапы, на которых:
- активируют первый режим работы камеры, при котором осуществляется настройка камеры по фиксированной области кадра, видимой камерой;
- осуществляют фиксацию ТС;
- в ответ на фиксацию ТС активируют второй режим работы камеры, при котором:
- получают набор кадров с изображениями областей, идентифицирующих государственный регистрационный знак (ГРЗ) ТС, за определенный промежуток времени;
- извлекают из полученного набора кадров изображения областей ГРЗ;
- осуществляют объединение всех полученных изображений областей ГРЗ;
- выполняют построение гистограммы распределения серого цвета упомянутых областей ГРЗ;
- определяют характеристики распределения полученной гистограммы;
- выполняют настройку камеры на основании полученных характеристик распределения.
В частном варианте осуществления заявленного изобретения при отсутствии фиксаций за определенный период работы первого режима активируется третий режим, при котором:
- запоминаются настройки экспонирования достигнутые в первом режиме;
- совершается ограниченное количество шагов в затемнение и осветление кадра;
- при появлении фиксаций ТС активируется второй режим работы камеры;
- если по завершении прохода шагов фиксации ТС не появились, то происходит применение сохраненных настроек и активируется первый режим.
Заявленный результат достигается также с помощью системы управления стационарной камерой машинного зрения, фиксирующей ТС, которая содержит по меньшей мере один процессор и по меньшей мере одно средство памяти, содержащее исполняемые по меньшей мере одним процессором машиночитаемые инструкции, которые при их выполнении упомянутым процессором реализуют вышеуказанный способ управления стационарной камерой машинного зрения.
ГРАФИЧЕСКИЕ МАТЕРИАЛЫ
Фиг. 1 иллюстрирует схему выполнения этапов заявленного способа.
Фиг. 2 иллюстрирует систему для выполнения заявленного способа.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
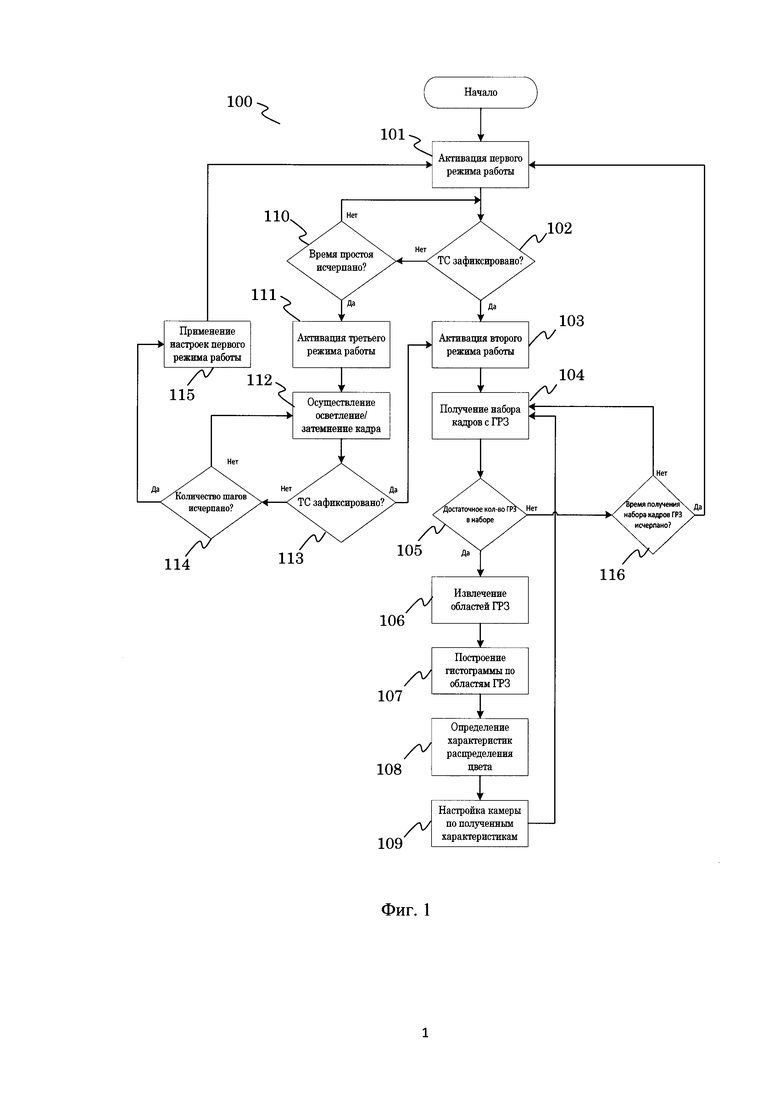
На Фиг. 1 изображена последовательность выполнения этапов заявленного способа управления стационарной камерой машинного зрения - 100.
На этапе 101 камера осуществляет работу в первом режиме, при котором осуществляется в заданный промежуток времени подстройка настроек по фиксированной области кадра. Камера по получаемому изображению получает структуру настроек, характеризующую область, по которой осуществляется калибровка камеры.
При осуществлении фиксации ТС, в частности при распознавании области ГРЗ, на этапе 102 осуществляется активация второго режима работы (этап 103).
При работе во втором режиме на этапе 104 осуществляется обработка набора кадров с изображениями зафиксированных ТС и проверяется достаточность количества кадров (этап 105) для осуществления калибровки режима работы камеры на основании извлеченных изображений областей ГРЗ (этап 106). Ряд кадров с изображениями ТС получается за определенный промежуток времени (этап 116).
На этапе 107 по полученным на этапе 106 областям ГРЗ выполняется построение гистограммы распределения серого цвета, по которой осуществляется определение характеристики распределения цвета областей ГРЗ, для чего осуществляется склейка всех упомянутых областей ГРЗ.
На этапе 109, на основании проведенного на этапе 108 определения характеристик распределения, получают параметры калибровки работы камеры, которые применяются и сохраняются.
Если на этапе 102 в заданный промежуток времени (этап 110) не происходит фиксации ТС, то выполняется активация третьего режима работы (этап 111).
При активации третьего режима работы 111 запоминаются настройки экспонирования, достигнутые в первом режиме.
На этапе 112 выполняется ограниченное количество шагов в затемнение и осветление кадра, получаемого при текущих настройках камеры. При появлении фиксации ТС (этап 113) осуществляется активация второго режима работы камеры.
Если на этапе 113 не происходит фиксации ТС за определенное количество шагов регулировки зоны видимости камерой (этап 114), то применяются настройки, полученные при первом режиме работы камеры (этап 115) и камера продолжает работать в этом режиме.
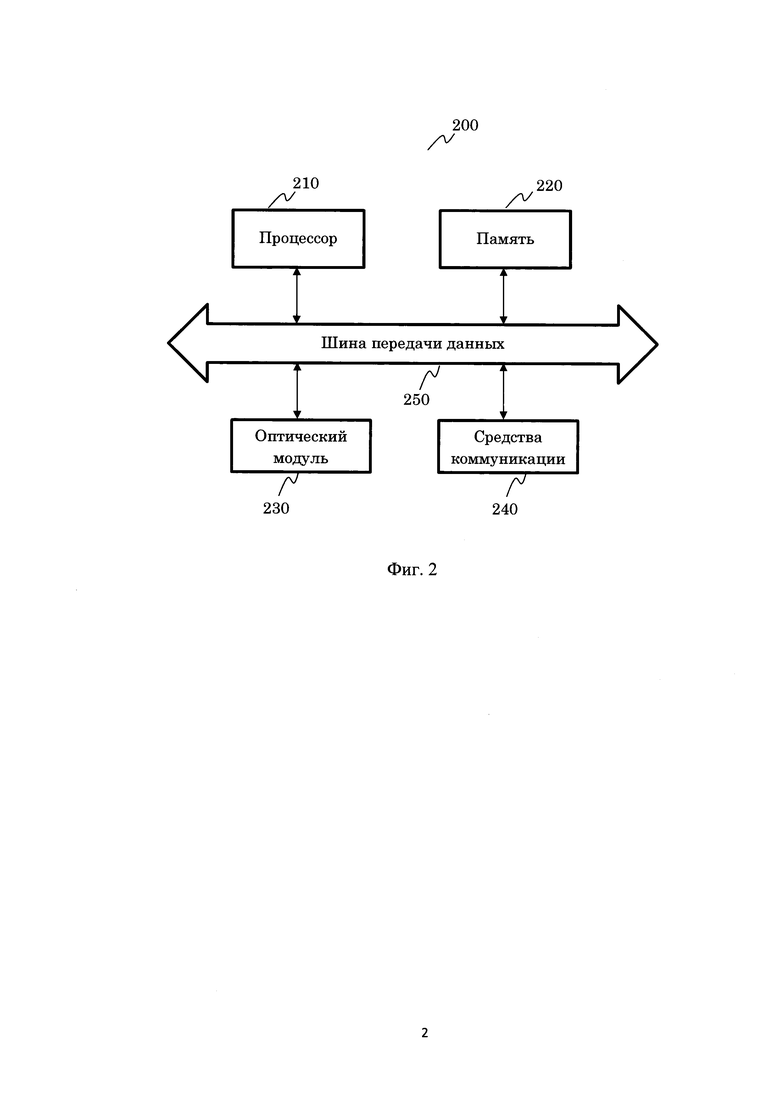
На Фиг. 2 изображен общий вид системы 200 для выполнения способа управления камерой машинного зрения.
Система 200 представляет собой совокупность аппаратных элементов, входящих в состав камеры наблюдения.
Система 200 содержит объединенные шиной передачи данных 250 один или более процессоров 210, одно или более средств памяти 220 (ОЗУ, ПЗУ, флэш и т.п.), оптический модуль 230, предназначенный для обеспечения фотовидеофиксации объектов, и средства коммуникации 240, такие как GPS приемник, GSM модуль (3G, 4G), Wi-Fi модуль.
В памяти 220 хранятся исполняемый процессором 210 код, который реализует этапы способа 100, на которых выполняются действия, соответствующие этапам 101-116.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ОБЪЕКТОВ В ОБЛАСТИ АВТОДОРОГИ | 2021 |
|
RU2770145C1 |
| Система автоматической видеофиксации дорожно-транспортных происшествий на перекрестке | 2021 |
|
RU2769832C1 |
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| СПОСОБ И УСТРОЙСТВО ФИКСАЦИИ ТРЕВОЖНЫХ СОБЫТИЙ НА СЛУЖЕБНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2021 |
|
RU2770862C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| Система обеспечения безопасности пешеходного перехода и способ реализации системы | 2020 |
|
RU2759475C2 |
| СИСТЕМА И СПОСОБ СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2019 |
|
RU2701092C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| Система фиксации нарушения правил парковки | 2020 |
|
RU2743455C1 |
Группа изобретений относится к области вычислительной техники. Техническим результатом является повышение точности распознавания объектов. Для этого предложен способ управления стационарной камерой машинного зрения, фиксирующей транспортные средства (ТС), содержащий этапы, на которых: активируют первый режим работы камеры, при котором осуществляется настройка камеры по фиксированной области кадра, видимой камерой; осуществляют фиксацию ТС; в ответ на фиксацию ТС активируют второй режим работы камеры, при котором получают набор кадров с изображениями областей, идентифицирующих государственный регистрационный знак (ГРЗ) ТС, за определенный промежуток времени; извлекают из полученного набора кадров изображения областей ГРЗ; осуществляют объединение всех полученных изображений областей ГРЗ; выполняют построение гистограммы распределения серого цвета на основании изображения объединенных областей ГРЗ, полученных за упомянутый промежуток времени; определяют характеристики распределения цвета областей ГРЗ на основании упомянутой гистограммы; выполняют калибровку камеры на основании полученных характеристик распределения цвета областей ГРЗ. 2 н. и 1 з.п. ф-лы, 2 ил.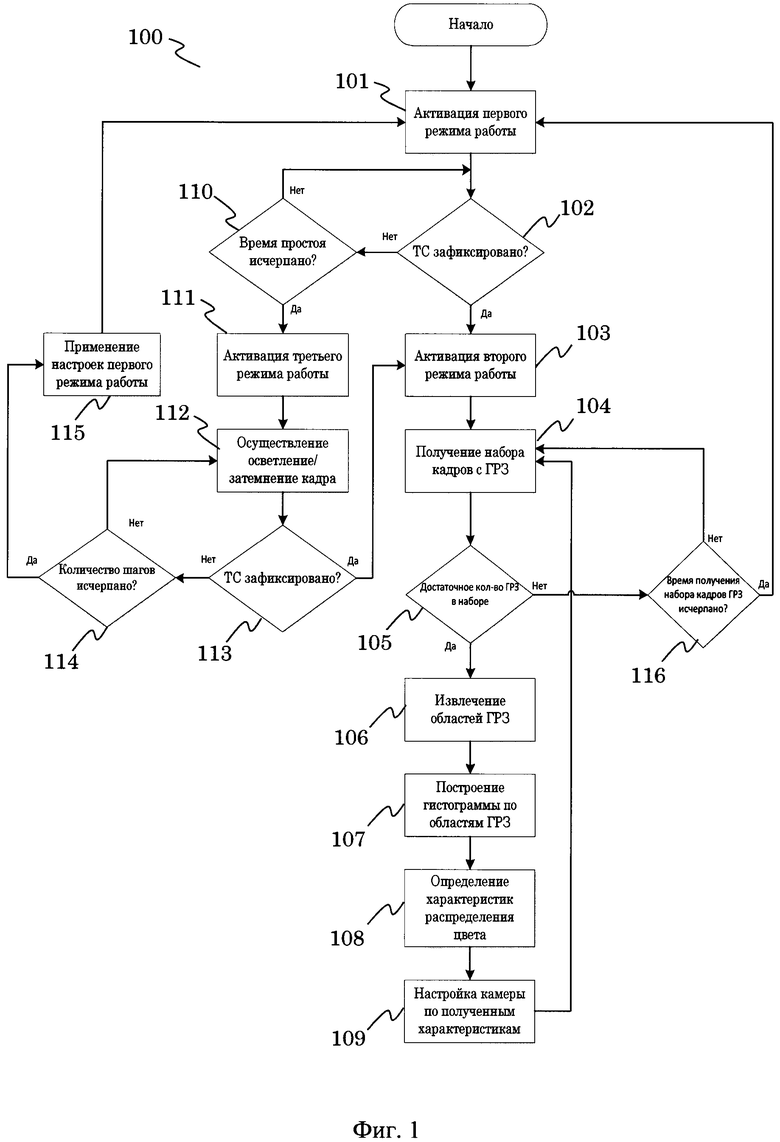
1. Способ управления стационарной камерой машинного зрения, фиксирующей транспортные средства (ТС), содержащий этапы, на которых:
- активируют первый режим работы камеры, при котором осуществляется настройка камеры по фиксированной области кадра, видимой камерой;
- осуществляют фиксацию ТС;
- в ответ на фиксацию ТС активируют второй режим работы камеры, при котором:
- получают набор кадров с изображениями областей, идентифицирующих государственный регистрационный знак (ГРЗ) ТС, за определенный промежуток времени;
- извлекают из полученного набора кадров изображения областей ГРЗ;
- осуществляют объединение всех полученных изображений областей ГРЗ;
- выполняют построение гистограммы распределения серого цвета на основании изображения объединенных областей ГРЗ, полученных за упомянутый промежуток времени;
- определяют характеристики распределения цвета областей ГРЗ на основании упомянутой гистограммы;
- выполняют калибровку камеры на основании полученных характеристик распределения цвета областей ГРЗ.
2. Способ по п. 1, дополнительно содержащий этап, на котором при отсутствии фиксаций за определенный период работы первого режима активируется третий режим, при котором:
- запоминаются настройки экспонирования, достигнутые в первом режиме;
- совершается ограниченное количество шагов в затемнение и осветление кадра;
- при появлении фиксаций ТС активируется второй режим работы камеры;
- если по завершении прохода шагов фиксации ТС не появились, то происходит применение сохраненных настроек и активируется первый режим.
3. Система управления стационарной камерой машинного зрения, фиксирующей ТС, содержащая по меньшей мере один процессор и по меньшей мере одно средство памяти, содержащее исполняемые по меньшей мере одним процессором машиночитаемые инструкции, которые при их выполнении упомянутым процессором реализуют способ по любому из пп. 1, 2.
| Способ изготовления фанеры-переклейки | 1921 |
|
SU1993A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СИСТЕМЫ И СПОСОБЫ НАБЛЮДЕНИЯ В НОЧНОЕ ВРЕМЯ | 2006 |
|
RU2452033C2 |
| Высевающий аппарат для квадратно-гнездовых свекловичных сеялок с электромагнитным приводом | 1960 |
|
SU130728A1 |

