Область техники, к которой относится изобретение
Заявленная группа изобретений относится к контрольно-измерительной технике и может быть применена в качества средства контроля дорожного движения и автоматического выявления нарушителей скоростного режима. Более конкретно группа изобретений относится к способу определения положения и скорости движения транспортного средства на дороге, а также к комплексу для его осуществления.
Уровень техники
Известен «Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления» («Стрелка»), патент РФ RU 2382416 C2, опубл. 20.02.2010.
Известный способ измерения координат и скорости предполагает измерение координат и скорости транспортных средств (ТС) с использованием импульсного радиолокатора и видеокамеры. По радиолокатору определяют дальность и скорость ТС. Одновременно по изображению ТС, полученному от видеокамеры, вычисляют координаты и скорости тех же транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимые потоки данных обо всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна. Для получения метрологически достоверных данных о скоростях и дальности до ТС используют данные радиолокатора, а за достоверные данные об азимуте тех же ТС принимают данные, полученные от видеокамеры.
В результате сравнения каждому ТС обеспечивают дальнейшее сопровождение до момента распознавания государственного регистрационного знака, после чего видеокамерой распознавания государственного регистрационного знака формируют кадр изображения ТС с распознанным государственным регистрационным знаком, скоростью и др. необходимыми сведениями.
К недостаткам указанного способа следует отнести тот факт, что определение скорости (и местоположения) ТС и его идентификация (распознавание номерного знака) происходят в различные моменты времени. При этом определение координат ТС для его сопровождения в зону распознавания происходит на значительном расстоянии (до 1000 м), там, где распознавание номера невозможно. Недостатком также является то, что способ реализуется только с помощью постоянно действующих двух независимых систем (радиолокатора и видеокамеры), что приводит к существенному увеличению габаритов и потребляемой мощности системы. Кроме того, применяемый для реализации способа радар (в силу использованного физического принципа) не дает информации об азимуте цели, а видеокамера, как следует из описания патента, не обеспечивает метрологически достоверных данных о скорости (в силу низкой точности определения местоположения ТС по видеоизображению на больших расстояниях), создавая, таким образом, возможность некорректного сопровождения ТС в зону распознавания.
Известен «Способ определения скорости транспортного средства», патент РФ RU 2442218 C1 (опубл. 10.02.2012), использующий результаты измерения дальности до автомобиля, полученные в разные моменты времени с помощью анализа изображения номерного знака, полученного с видеокамеры. Дальность до ТС вычисляется по изменению размера изображения номерного знака, полученного на матрице видеокамеры в разные моменты времени с учетом коррекции искажений пропорций пластины номерного знака. Для каждого из моментов фиксации номерного знака определяется расстояние до ТС, а вычисление скорости производится по изменению расстояния за фиксированное время.
Недостатком способа является отсутствие учета погрешностей, связанных с изменением угла наблюдения автомобиля при его движении в зоне контроля. Кроме того, к недостаткам относится также ограниченная область применения способа. Он применим только для систем, расположенных на небольшой высоте над дорогой, и при условии малости угла (2-4 градуса) между направлением движения ТС и осью видеокамеры. Именно эти условия обеспечивают малую угловую погрешность измерения, однако, они же делают применение способа малопригодным в случаях, когда система предназначена для автоматического контроля интенсивных транспортных потоков. Для таких потоков измерение под малым углом к направлению движения неизбежно приведет к взаимному затенению автомобилей, из чего следует необходимость установки камеры на значительной (до 10 м) высоте.
Наиболее близким по технической сущности является «Способ определения скорости транспортного средства», патент РФ RU 2419884 C1 (опубл. 27.05.2011), выбранный в качестве прототипа.
Согласно предложенному способу фиксируют видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры и дополнительно измеряют параметры расположения видеокамеры относительно плоскости дороги. Измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля и определяют направление перемещения пластины ГРЗ в системе координат дороги по точкам центра пластины ГРЗ в начале и в конце зоны контроля. Далее определяют величину перемещения точки центра пластины ГРЗ в плоскости, параллельной плоскости дороги, расположенной на высоте перемещения точки центра пластины ГРЗ. По указанной величине перемещения и времени, за которое было совершено это перемещение, определяют скорость ТС.
Предварительное измерение параметров расположения видеокамеры относительно плоскости дороги представляет собой трудоемкую задачу, в ходе которой необходимо учитывать, как следует из описания патента, значительное число параметров, связанных как с положением и параметрами камеры и объектива, так и с параметрами дороги в зоне контроля (высота, углы поворота, крена, наклона, фокусное расстояние объектива, разрешение и размеры матрицы в видеокамере, углы наклона и крена дороги и т.п.). Необходимость ее решения существенно осложняет процесс установки системы, реализующий описанный способ. Сокращение числа таких параметров возможно только при установке видеокамеры непосредственно над полосой движения транспорта (или с малым смещением от ее оси), что существенно сокращает область применения предлагаемого способа, поскольку требует строительства специальных инженерных сооружений над дорогой.
К недостаткам также относится возможность неконтролируемых случайных смещений камеры (при ослаблении крепления за счет вибраций, осадки грунта и т.п.) в ходе эксплуатации, приводящих к снижению точности измерений.
Кроме того, реализация способа в измерительной технике требует квалифицированного подтверждения государственной метрологической службой правильности определения параметров расположения каждой видеокамеры (и периодического его подтверждения непосредственно на месте установки), поскольку неточность определения этих параметров катастрофическим образом влияет на погрешность измерений скорости.
Недостатком способа является также чисто оптический метод измерений, который не позволяет получать статистическую информацию о дорожном движении (интенсивность движения, пробки и т.п.) в условиях ограниченной видимости (туман, снег).
К недостаткам способа относится также использование для расчета скорости временного интервала между первым и последним кадром без учета динамики изменения скорости в процессе перемещения ТС в поле зрения.
В уровне техники известен фоторадарный комплекс «Стрелка», использующий «Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления» (патент РФ на изобретение №2382416, опубл. 20.02.2010 г.). Данный фоторадарный комплекс содержит радар, видеокамеру распознавания ГРЗ и блок управления и обработки данных. Радар включает в себя модуль обработки сигналов, обеспечивающий вычисление скорости и дальности всех ТС, находящихся на выбранном участке дорожного полотна, а данные с видеокамеры панорамного обзора совместно с данными радара используются для получения скоростей и координат ТС, их идентификации и передачи данных для автоматической регистрации нарушений Правил дорожного движения (далее - ПДД).
Данный комплекс позволяет одновременно контролировать до 4 полос движения с помощью видеокамеры высокого разрешения с широкоугольным объективом. Причем для установки комплекса не требуется строительство ферменных конструкций, возможна установка на столбе рядом с краем проезжей части.
Для выделения отдельных целей в потоке с требуемым уровнем достоверности в прототипе используются следующие данные:
- дальность - с радара и видеокамеры,
- скорость - с радара,
- угловая координата - с видеокамеры.
Недостатком прототипа является необходимость комплексирования данных с видеокамеры и радара для обеспечения работы всей системы. В случае если видеоданные по каким-либо причинам не доставляются или имеют низкое качество (например, в сложных погодных условиях или в условиях недостаточной видимости), надежность работы системы падает вплоть до полной неработоспособности.
Известен комплекс видеофиксации и измерения скорости движения и координат транспортных средств (патент на полезную модель №113398, опубл. 10.02.2012), содержащий размещенные в кожухе радар, видео-блок и соединенный с ними процессорный блок, радар выполнен с возможностью одновременного измерения скорости, дальности, азимута и габаритов транспортного средства, и содержит передатчик, по меньшей мере, два приемника и модуль цифровой обработки сигналов.
Недостатком данного комплекса является необходимость значительных вычислительных ресурсов, отсутствие возможности проверки точности измерения скорости и правильности идентификации цели альтернативным методом. К недостаткам также относится отсутствие резервирования в системе, что может привести к кратковременным неконтролируемым сбоям при измерении и/или идентификации целей. Также недостатком комплекса является его низкая скрытность, связанная с постоянным (хоть и незначительным по мощности) СВЧ-излучением, позволяющим обнаруживать его с помощью радар-детекторов.
Задачей изобретения является повышение точности и достоверности измерений и упрощение процесса калибровки комплекса при измерении скорости ТС.
Раскрытие изобретения
Для решения поставленной задачи предложен способ определения положения и скорости движения транспортного средства на дороге, в котором получают посредством видеокамеры видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры, определяют координаты точек углов пластины ГРЗ в системе координат светочувствительной матрицы, преобразуют координаты точек углов пластины ГРЗ из системы координат светочувствительной матрицы в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, производят привязку координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы, распознают символы и формат ГРЗ посредством оптического распознавания символов, определяют координаты углов и центра ГРЗ на изображении, на основании полученных координат изображения ГРЗ на матрице видеокамеры восстанавливают координаты ГРЗ на дороге в заданные моменты времени, используя привязку координатных сеток, по смещению координат ГРЗ рассчитывают скорость движения ТС, корректируют скорость движения ТС с учетом особенностей размещения ГРЗ.
Отличием заявленного способа является то, что он содержит этап, на котором от радара получают данные о положении ТС на дороге, на этапе осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы производят определение параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры, и на основании полученных параметров перспективной проекции определяют скорость ТС по смещению координат ГРЗ.
В предпочтительном варианте способа параметры перспективной проекции уточняют с помощью итеративного математического алгоритма с адаптивным поиском указанных параметров.
Уточнение параметров перспективной проекции предпочтительно производят периодически через заранее установленные интервалы времени.
Предпочтительно аппроксимируют последовательность значений скорости ТС в период нахождения ТС в области видимости камеры гладкой функцией.
В процессе измерений предпочтительно постоянно оценивают величину погрешности, и в случаях, когда величина погрешности измерений выходит за пределы заданной, автоматически включают радар для дополнительного уточнения параметров перспективной проекции.
В качестве результатов измерений скорости и положения ТС предпочтительно используют данные, полученные как от радара в результате обработки радиолокационных сигналов, так и от видеокамеры в результате анализа изображения.
Кроме того, для решения задачи предложен комплекс для определения положения и скорости движения ТС на дороге, содержащий взаимосвязанные между собой видеокамеру, радар и блок управления, отличающийся тем, что блок управления выполнен с возможностью осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы посредством определения параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры.
Радар предпочтительно выполнен с возможностью одновременного измерения скорости, дальности, азимута и габаритов транспортного средства.
В предпочтительном варианте радар содержит передатчик, по меньшей мере, два приемника и модуль цифровой обработки сигналов.
Радар предпочтительно выполнен в виде легкосъемной конструкции с возможностью оперативного отсоединения его от комплекса.
Поле обзора радиолокатора предпочтительно согласовано с зоной распознавания ГРЗ, которую обеспечивает видеокамера.
При осуществлении заявленной группы изобретений может быть получен технический результат, заключающийся в том, что измерение скорости по изображению ТС производится с высокой точностью без постоянного использования радара и без ручного измерения параметров расположения видеокамеры относительно дороги. Сокращается потребляемая системой мощность, экономятся вычислительные ресурсы, повышается надежность измерений, уменьшается уровень излучения СВЧ-энергии. Для запуска системы в эксплуатацию не требуется метрологическая экспертиза каждой точки установки - обеспечение точности измерений происходит автоматически, за счет реализации указанного способа.
Реализация данного способа позволит существенно снизить затраты на периодическое проведение ручной калибровки, а также позволит существенно уменьшить необходимые для работы системы энергетические и вычислительные ресурсы, кратковременно подключая радар только тогда, когда необходима коррекция.
Предлагаемые способ и комплекс позволяют автоматически определять скорость движения и положение ТС на дороге на основе анализа изображения ТС, полученного с видеокамеры.
Полученный технический результат достигается за счет того, что калибровка предложенного метода измерения производится в полностью автоматическом режиме на основе данных от радара и от видеокамеры. Калибровка обеспечивает автоматическое определение параметров перспективной проекции для последующего измерения скорости и положения ТС только по его изображению на видеокамере без использования радара.
Краткое описание чертежей
На Фиг.1 представлена перспективная проекция плоскости уровня расположения центра ГРЗ на матрицу видеокамеры.
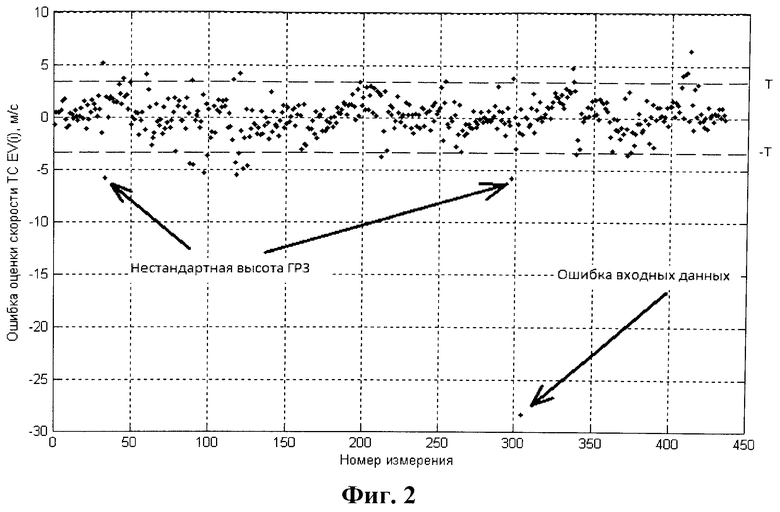
На Фиг.2 показано значение ошибки. Измерения, ошибка которых попала в область между пунктирными линиями, будут использоваться для дальнейшего обучения.
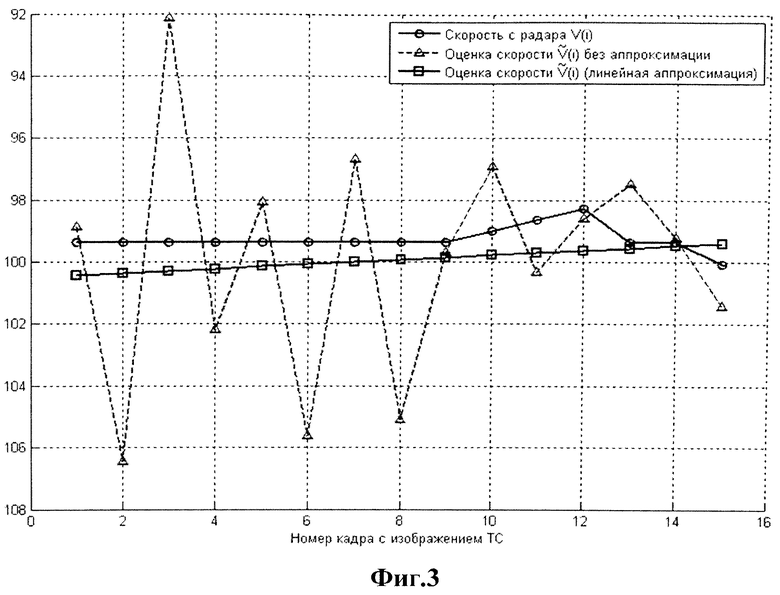
На Фиг.3 показан пример графиков скорости ТС, полученной с радара, и оценок скорости по видеоизображению с аппроксимацией и без аппроксимации.
На Фиг.4 показана схема комплекса, реализующего способ определения положения и скорости движения транспортного средства на дороге.
Осуществление изобретения
Способ, который реализован в заявленном комплексе, состоит в определении положения и скорости движения ТС, которое осуществляется по положению и скорости движения ГРЗ, жестко закрепленного на ТС. С помощью алгоритмов оптического распознавания символов распознаются символы и формат ГРЗ, по заранее известному шаблону распознанного формата точно определяются положения углов и центра ГРЗ. Поскольку камера имеет довольно длинную полосу обзора (порядка нескольких десятков метров), а частота съемки видеокамеры не менее 20 кадров в секунду, на временном интервале, когда ТС находится в поле зрении камеры, изображение его ГРЗ присутствует на нескольких кадрах. Это позволяет отследить траекторию движения ГРЗ (а следовательно, и ТС), а также скорость на основе изменения координат расположения ГРЗ на дороге. Восстановление координат ГРЗ происходит на основе пересчета координат положения ГРЗ на изображении с использованием формулы перспективной проекции.
Основной отличительной особенностью данного изобретения является полностью автоматизированный поиск параметров перспективной проекции дорожных координат в координаты изображения. Для этого используются данные о положении и скорости ТС, полученные от радара. Поскольку определение координат и скорости ТС с помощью радара является метрологически достоверным, то эти данные могут быть использованы для калибровки системы определения положения и скорости ТС по видеоизображению. После чего радар может быть отключен от системы, а в частном случае исполнения устройства - полностью демонтирован.
Для калибровки параметров перспективной проекции используется массив данных, включающий мгновенные значения координат ТС на дороге, скорости ТС и координат ГРЗ ТС на изображении. С помощью итеративного математического алгоритма производится адаптивный поиск параметров перспективной проекции. Учитывая единичное количество искомых величин, объема обучающего множества порядка нескольких десятков-сотен ТС с количеством порядка десятка измерений на каждое будет достаточно для высокой точности восстановления параметров проекции.
Способ реализуется следующим образом. Обработка делится на два этапа: этап калибровки параметров системы и этап определения положения и скорости движения ТС.
На этапе калибровки восстанавливают параметры перспективной проекции, которая в общем случае выглядит, как показано в формуле (1) и фиг.1.

где {X, Y} - координаты ТС на дороге;
{x, y} - координаты центра ГРЗ на изображении;
{c1, … c8} - параметры перспективной проекции.
1. Для восстановления неизвестных параметров перспективной проекции используют запись данных с радара и видеокамеры, на которой присутствует не менее заданного количества измерений координат ТС, полученных как с радара, так и с видеокамеры (как правило, не менее 300). Таким образом, используется массив измерений значений пар {Xi, Yi}, полученных с радара, и соответствующих им значений {xi, yi}, полученных в результате использования алгоритмов оптического распознавания символов ГРЗ, где i обозначает порядковый номер измерения. Значения {Xi, Yi} и {xi, yi} должны быть синхронизированы по времени.
2. Получают систему уравнений, количество которых равно удвоенному количеству измерений (см. формулу 2).
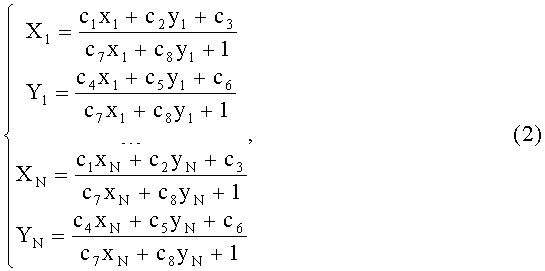
где N - количество измерений координат ТС, полученных с радара и видеокамеры.
3. Решают систему уравнений приближенным итеративным способом на основе использования метода оптимизации ошибки, в качестве которой выбирают квадратичную ошибку E оценки координат ТС 


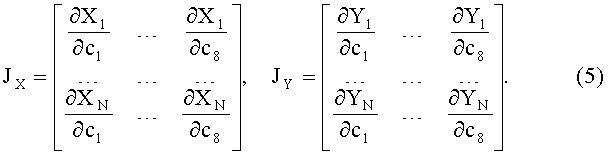
Для приближенного решения системы уравнений как частный случай используют алгоритм Левенберга-Маквардта. Для этого определяют якобиан JX и JY, как показано в формуле (5).
Итеративно обновляют коэффициенты {c1, … c8} на приращение согласно формулам 6 и 7.
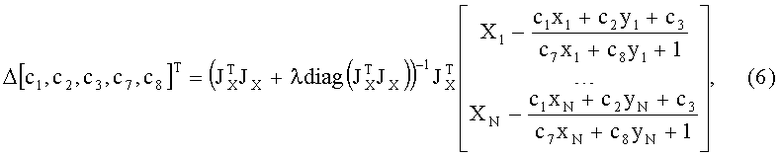

где λ - коэффициент регуляризации (например, равный 1).
4. Фильтруют исходные данные на основе полученных результатов. В связи с тем, что исходные данные обучения могут содержать ошибки (некорректно распознанные ГРЗ, нестандартное расположение ГРЗ по высоте и т.п.), из обучающей выборки исключаются те измерения, которые имеют значение ошибки определения скорости больше порогового. Оценку скорости определяют по формуле (8), ошибку определения скорости EVi определяют по формуле (9).


где Vi - скорость i-го измерения, полученная с радара;
ΔTi - временной интервал между измерениями i и i-1.
Исключению из дальнейшего обучения подлежат те измерения, абсолютная ошибка оценки скорости которых больше порога T. Значение порога T вычисляется, например, пропорционально значению среднеквадратичному отклонению EVi (см. формулу (10)).

где α - коэффициент, равный, например, 2.
На Фиг.2 показано значение ошибки EVi. Измерения, ошибка EVi которых попала в область между пунктирными линиями, будут использоваться для дальнейшего обучения.
5. На данных, оставшихся после фильтрации, повторно проводят обучение параметров перспективной проекции с использованием метода оптимизации квадратичной ошибки, например, с помощью алгоритма Левенберга-Маквардта.
На этапе определения положения и скорости движения ТС (режим эксплуатации системы) используют зафиксированные параметры перспективной проекции.
1. Рассчитывают оценку координат ТС
2. Рассчитывают оценку скорости 
3. Корректируют оценку скорости 

где 
Далее на основе использования известной ширины пластины ГРЗ W (ширина пластины известна по результатам оптического распознавания формата ГРЗ) производят корректировку скорости 

4. Аппроксимируют последовательность значений скорости 
Комплекс, в котором реализуется указанный способ и показанный на Фиг.4, состоит из видеокамеры 1, многоцелевого радара 2 и блока 3 управления и обработки данных с программным обеспечением для обработки получаемой информации, распознавания знаков государственной регистрации и формирования фотокадров с измеренными скоростями и номерными знаками.
Работа радара 2 основана на принципе фазовой пеленгации. Радар 2 включает в себя передатчик, не менее двух приемников и модуль цифровой обработки сигналов. Передатчик излучает комбинированный сигнал, сочетающий линейную частотную модуляцию и частотную манипуляцию, благодаря чему обеспечивается сочетание высокой точности и скорости измерения параметров целей (дальность, скорость) в модуле цифровой обработки. Приемники принимают отраженный сигнал, по разности фаз между сигналами с различных приемников блок цифровой обработки определяет направление на цель. Все данные о целях в уже обработанном виде непрерывно передаются на измерительный модуль комплекса.
Новым в разработанном устройстве является то, что в качестве радиолокатора используется легкосъемный радар 2, обеспечивающий измерение не только дальности и скорости всех целей, находящихся в поле его зрения (как указано в прототипе), но и азимута каждой цели, обеспечивая, таким образом, точное определение местоположения ТС на контролируемом участке дорожного полотна. При этом видеокамера 1 обеспечивает возможность наблюдения и формирования изображения ТС одновременно на нескольких полосах движения как в прямом, так и в обратном направлении, а блок 3 управления и обработки данных реализует предлагаемый способ измерения с помощью программного обеспечения за счет автоматического определения параметров перспективной проекции с использованием данных, полученных одновременно от радара 1 и от видеокамеры 2, адаптивного поиска и уточнения параметров перспективной проекции с помощью итеративного математического алгоритма, определения положения и скорости ТС по величине и смещению координат ГРЗ на основании полученных параметров перспективной проекции, периодической коррекции результатов с учетом поправок параметров перспективной проекции, полученных с помощью радара, аппроксимации гладкой функцией последовательности значений скорости ТС, полученной за время нахождения ТС в области видимости видеокамеры, а также за счет постоянной оценки в процессе измерений величины погрешности и автоматического включения в случае необходимости радара для повторной автокалибровки.
Таким образом, заявленная группа изобретений, включающая способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления, позволяет получить технический результат, заключающийся в повышении точности и достоверности измерений и упрощении процесса калибровки комплекса при измерении скорости ТС. Технический результат достигается за счет того, что калибровка предложенного метода измерения производится в полностью автоматическом режиме на основе данных от радара и от видеокамеры. Калибровка обеспечивает автоматическое определение параметров перспективной проекции для последующего измерения скорости и положения ТС только по его изображению на видеокамере без использования радара.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный способ фотофиксации нарушений ПДД | 2019 |
|
RU2749941C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГАБАРИТНОЙ ДЛИНЫ ТРАНСПОРТНЫХ СРЕДСТВ, СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2567440C1 |
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ВИДЕОКАМЕРЫ ИЗМЕРИТЕЛЯ СКОРОСТИ ДО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2470376C2 |
| Система фото-, видеофиксации нарушений правил дорожного движения и способ её работы | 2018 |
|
RU2711825C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |

Комплекс содержит видеокамеру (1), радар (2), блок управления и обработки данных (3) с программным обеспечением для обработки получаемой информации, распознавания знаков государственной регистрации и формирования фотокадров с измеренными скоростями и номерными знаками. Блок управления (3) выполнен с возможностью осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы посредством определения параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры. Предложен также способ определения положения и скорости движения транспортного средства (ТС) на дороге. Достигается повышение точности и достоверности измерений и упрощение процесса калибровки комплекса при измерении скорости ТС. 2 н. и 7 з.п. ф-лы, 4 ил. 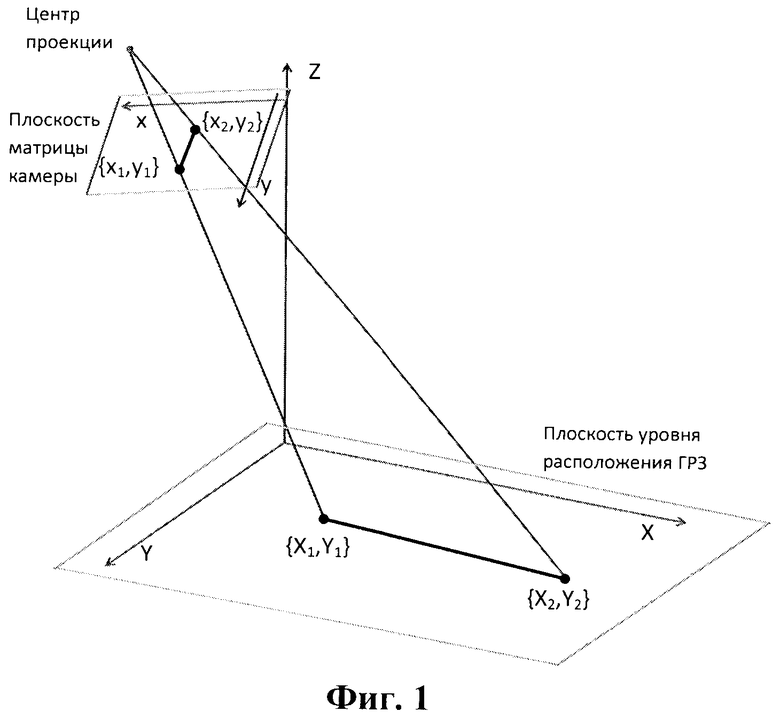
1. Способ определения положения и скорости движения транспортного средства (ТС) на дороге, в котором:
- получают посредством видеокамеры видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры,
- определяют координаты точек углов пластины ГРЗ в системе координат светочувствительной матрицы,
- преобразуют координаты точек углов пластины ГРЗ из системы координат светочувствительной матрицы в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги,
- производят привязку координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы,
- распознают символы и формат ГРЗ посредством оптического распознавания символов,
- определяют координаты углов и центра ГРЗ на изображении,
- на основании полученных координат ГРЗ на матрице видеокамеры восстанавливают координаты ТС на дороге в заданные моменты времени, используя привязку координатных сеток,
- по смещению координат ТС рассчитывают скорость движения ТС,
- корректируют скорость движения ТС с учетом особенностей размещения ГРЗ, отличающийся тем, что
- получают с радара данные о положении ТС на дороге,
- на этапе осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы производят определение параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры,
- на основании полученных параметров перспективной проекции определяют скорость ТС по смещению координат ГРЗ.
2. Способ по п.1, отличающийся тем, что уточняют параметры перспективной проекции с помощью итеративного математического алгоритма с адаптивным поиском указанных параметров.
3. Способ по п.1, отличающийся тем, что периодически корректируют полученные результаты измерения скорости движения ТС с учетом поправок параметров перспективной проекции, полученных с помощью радара.
3. Способ по п.1, отличающийся тем, что аппроксимируют последовательность значений скорости ТС в период нахождения ТС в области видимости камеры гладкой функцией.
4. Способ по п.1, отличающийся тем, что в процессе измерений постоянно оценивают величину погрешности, автоматически включая радар для дополнительного уточнения параметров перспективной проекции.
5. Комплекс для определения положения и скорости движения ТС на дороге, содержащий взаимосвязанные между собой видеокамеру, радар и блок управления и обработки данных, отличающийся тем, что блок управления и обработки данных выполнен с возможностью осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы посредством определения параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры.
6. Комплекс по п.5, отличающийся тем, что радар выполнен с возможностью одновременного измерения скорости, дальности и азимута транспортного средства.
7. Комплекс по п.5, отличающийся тем, что радар содержит передатчик, по меньшей мере, два приемника и модуль цифровой обработки сигналов,
8. Комплекс по п.5, отличающийся тем, что радар выполнен в виде легкосъемной конструкции с возможностью оперативного отсоединения его от комплекса
9. Комплекс по п.5, отличающийся тем, что поле зрения видеокамеры согласовано с зоной обзора радара.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2419884C1 |
| WO 2010077316 A1, 08.07.2010 | |||
| WO 2013128427 A1, 06.09.2013 | |||

