3.2.4.1. Область техники, к которой относится изобретение.
Изобретение относится к области применения средств и способов контроля за соблюдением правил дорожного движения (ПДД). Заявляемый способ определения скорости транспортного средства (ТС) не является способом непосредственного измерения скорости и технические средства, его использующие, не нуждаются в соответствующей метрологической сертификации кроме, как в части точности измерения промежутков времени. Измерение скорости производится на основании данных фотофиксации подозреваемых в нарушении скоростного режима транспортных средств (ТС) любыми средствами сравнения длин, либо приборами самого ТС, показания которых транслирует (при наличии) Wi-Fi-, Bluetooth- или иной маячок, установленный на ТС.
Классы изобретения:

3.2.4.2. Уровень техники.
В настоящее время имеется широкий спектр средств и способов контроля за соблюдением правил дорожного движения, которые основываются, как на непосредственных способах измерения, так и косвенных способах. Помимо контроля положения транспортного средства на дороге, важнейшим из всех параметров является контроль за соблюдением скоростного режима. Прямого способа измерения скорости, как известно, по определению не существует и, по всей видимости, следует различать непосредственные, вытекающие из определения термина скорости, и косвенные. Непосредственные способы измерения скорости ТС основываются на измерении расстояния, проходимого транспортным средством и измерении времени, за которое это расстояние им пройдено. Сюда же можно отнести способ измерения, основанный на математической аппроксимации функции перемещения ТС от времени и последующего нахождения производной по времени этой функции. Отношение перемещения к промежутку времени, за которое оно произошло, дает величину средней скорости на данном отрезке траектории. Большинство косвенных способов измерения основываются на измерении времени возврата или изменения частоты отраженной от транспортного средства электромагнитной волны (радары, лидары). Существенными недостатками известных способов является наличие скрытых процессов в произведении измерений, совершенно ошибочный подход в предоставлении сведений о погрешностях приборов на их основе и погрешностях самих способов, зачастую остающимися за рамками рассмотрения погрешностей приборов, неверная информация о доверительных интервалах и доверительных вероятностях для измеренных величин.
Задачей заявляемого изобретения является повышение точности и достоверности измерений, обеспечение наглядности и доступности для понимания широким кругом вовлеченных лиц материалов фото-фиксации и возможность для них прямой перепроверки результатов измерений, исключение процессов калибровки при измерении скорости ТС.
Уровень техники по заявляемому изобретению хорошо изложен в соответствующем разделе описания изобретения-аналога RU 2559418 С2 (приоритет от 15 Октября 2013 г. авторы Комлик И.Ф. (RU). Симончик К.К. (RU), Бондарь Д.B .(RU). Барский И.В. (RU) «Способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления» [5] и вместе с описанием самого изобретения-аналога образует уровень техники заявляемого изобретения. Данный текст с соответствующей адаптацией приводится ниже.
Известен «Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления» («Стрелка»), патент РФ RU 2382416 С2, опубл. 20.02.2010. (см. источник [1]) Данный способ измерения координат и скорости предполагает измерение координат и скорости транспортных средств (ТС) с использованием импульсного радиолокатора и видеокамеры. По радиолокатору определяют дальность и скорость ТС. Одновременно по изображению ТС, полученному от видеокамеры, вычисляют координаты и скорости тех же транспортных средств, находящихся в кадре, после чего сравнивают получаемые независимые потоки данных обо всех ТС, находящихся в текущий момент на выбранном участке дорожного полотна. Для получения метрологически достоверных данных о скоростях и дальности до ТС используют данные радиолокатора, а за достоверные данные об азимуте тех же ТС принимают данные, полученные от видеокамеры. В результате сравнения каждому ТС обеспечивают дальнейшее сопровождение до момента распознавания государственного регистрационного знака, после чего видеокамерой распознавания государственного регистрационного знака формируют кадр изображения ТС с распознанным государственным регистрационным знаком, скоростью и др. необходимыми сведениями.
Недостатком способа является необходимость комплексирования данных с видеокамеры и радара для обеспечения работы всей системы. В случае если видеоданные по каким-либо причинам не доставляются или имеют низкое качество (например, в сложных погодных условиях или в условиях недостаточной видимости), надежность работы системы падает вплоть до полной неработоспособности. К недостаткам указанного способа следует отнести тот факт, что определение скорости (и местоположения) ТС и его идентификация (распознавание номерного знака) происходят в различные моменты времени. При этом определение координат ТС для его сопровождения в зону распознавания происходит на значительном расстоянии (до 1000 м), там, где распознавание номера невозможно. Недостатком также является то, что способ реализуется только с помощью постоянно действующих двух независимых систем (радиолокатора и видеокамеры), что приводит к существенному увеличению габаритов и потребляемой мощности системы. Кроме того, применяемый для реализации способа радар (в силу использованного физического принципа) не дает информации об азимуте цели, а видеокамера, как следует из описания патента, не обеспечивает метрологически достоверных данных о скорости (в силу низкой точности определения местоположения ТС по видеоизображению на больших расстояниях), создавая, таким образом, возможность некорректного сопровождения ТС в зону распознавания.
Известен «Способ определения скорости транспортного средства», патент РФ RU 2442218 С1 (опубл. 10.02.2012), (см. источник [2]) использующий результаты измерения дальности до автомобиля, полученные в разные моменты времени с помощью анализа изображения номерного знака, полученного с видеокамеры. Дальность до ТС вычисляется по изменению размера изображения номерного знака, полученного на матрице видеокамеры в разные моменты времени с учетом коррекции искажений пропорций пластины номерного знака. Для каждого из моментов фиксации номерного знака определяется расстояние до ТС, а вычисление скорости производится по изменению расстояния за фиксированное время.
Недостатком способа является отсутствие учета погрешностей, связанных с изменением угла наблюдения автомобиля при его движении в зоне контроля. Кроме того, к недостаткам относится также ограниченная область применения способа. Он применим только для систем, расположенных на небольшой высоте над дорогой, и при условии малости угла (2-4 градуса) между направлением движения ТС и осью видеокамеры. Именно эти условия обеспечивают малую угловую погрешность измерения, однако, они же делают применение способа малопригодным в случаях, когда система предназначена для автоматического контроля интенсивных транспортных потоков. Для таких потоков измерение под малым углом к направлению движения неизбежно приведет к взаимному затенению автомобилей, из чего следует необходимость установки камеры на значительной (до 10 м) высоте.
Известен «Способ определения скорости транспортного средства», патент РФ RU 2419884 С1 (опубл. 27.05.2011), (см. источник [3]). Согласно предложенному способу фиксируют видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры и дополнительно измеряют параметры расположения видеокамеры относительно плоскости дороги. Измеряют координаты точек углов и центра пластины ГРЗ в системе координат видеокадра в начале и в конце зоны контроля и определяют направление перемещения пластины ГРЗ в системе координат дороги по точкам центра пластины ГРЗ в начале и в конце зоны контроля. Далее определяют величину перемещения точки центра пластины ГРЗ в плоскости, параллельной плоскости дороги, расположенной на высоте перемещения точки центра пластины ГРЗ. По указанной величине перемещения и времени, за которое было совершено это перемещение, определяют скорость ТС.
Предварительное измерение параметров расположения видеокамеры относительно плоскости дороги представляет собой трудоемкую задачу, в ходе которой необходимо учитывать, как следует из описания патента, значительное число параметров, связанных как с положением и параметрами камеры и объектива, так и с параметрами дороги в зоне контроля (высота, углы поворота, крена, наклона, фокусное расстояние объектива, разрешение и размеры матрицы в видеокамере, углы наклона и крена дороги и т.п.). Необходимость ее решения существенно осложняет процесс установки системы, реализующий описанный способ. Сокращение числа таких параметров возможно только при установке видеокамеры непосредственно над полосой движения транспорта (или с малым смещением от ее оси), что существенно сокращает область применения предлагаемого способа, поскольку требует строительства специальных инженерных сооружений над дорогой.
К недостаткам также относится возможность неконтролируемых случайных смещений камеры (при ослаблении крепления за счет вибраций, осадки грунта и т.п.) в ходе эксплуатации, приводящих к снижению точности измерений.
Кроме того, реализация способа в измерительной технике требует квалифицированного подтверждения государственной метрологической службой правильности определения параметров расположения каждой видеокамеры (и периодического его подтверждения непосредственно на месте установки), поскольку неточность определения этих параметров катастрофическим образом влияет на погрешность измерений скорости. К недостаткам способа относится также использование для расчета скорости временного интервала между первым и последним кадром без учета динамики изменения скорости в процессе перемещения ТС в поле зрения.
Известен комплекс видеофиксации и измерения скорости движения и координат транспортных средств (см. источник [4]), Полезная модель RU 113398 U1, опубл. 10.02.2012), содержащий размещенные в кожухе радар, видео-блок и соединенный с ними процессорный блок, радар выполнен с возможностью одновременного измерения скорости, дальности, азимута и габаритов транспортного средства, и содержит передатчик, по меньшей мере, два приемника и модуль цифровой обработки сигналов. Недостатком данного комплекса является необходимость значительных вычислительных ресурсов, отсутствие возможности проверки точности измерения скорости и правильности идентификации цели альтернативным методом. К недостаткам также относится отсутствие резервирования в системе, что может привести к кратковременным неконтролируемым сбоям при измерении и/или идентификации целей. Также недостатком комплекса является его низкая скрытность, связанная с постоянным (хоть и незначительным по мощности) СВЧ-излучением, позволяющим обнаруживать его с помощью радар-детекторов.
Ближайший аналог.
Ближайшими аналогами предлагаемого способа являются способы, описанные в изобретениях RU 2559418 С2 (приоритет от 15 Октября 2013 г. авторы Комлик И.Ф. (RU), Симончик К.К. (RU), Бондарь Д.B. (RU), Барский И.В. (RU) «Способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления» [5] и RU 2557667 С2 (приоритет от 12 Декабря 2013 г.) Мустафин Р. Г. (RU) // Способ определения скорости движения транспортного средства //
В изобретении-аналоге RU 2559418 С2 (Барский И.В. с соавторами) предложен способ определения положения и скорости движения транспортного средства на дороге, в котором получают посредством видеокамеры видеокадры с изображением пластины государственного регистрационного знака (ГРЗ) ТС при перемещении его в зоне контроля видеокамеры, определяют координаты точек углов пластины ГРЗ в системе координат светочувствительной матрицы, преобразуют координаты точек углов пластины ГРЗ из системы координат светочувствительной матрицы в систему координат дороги с учетом параметров расположения видеокамеры относительно плоскости дороги, производят привязку координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы, распознают символы и формат ГРЗ посредством оптического распознавания символов, определяют координаты углов и центра ГРЗ на изображении, на основании полученных координат изображения ГРЗ на матрице видеокамеры восстанавливают координаты ГРЗ на дороге в заданные моменты времени, используя привязку координатных сеток, по смещению координат ГРЗ рассчитывают скорость движения ТС, корректируют скорость движения ТС с учетом особенностей размещения ГРЗ.
Определение величины перемещения ТС на основании по-кадрового анализа изображения ГРЗ применяется в измерительных комплексах «Стрелка», «Азимут». Если рассматривать ГРЗ, как обязательную часть кузова ТС, то и данные комплексы могут рассматриваться как аналоги заявляемого изобретения.
Отличием изобретения-аналога от вышеизложенных является то, что оно содержит этап, на котором от радара получают данные о положении ТС на дороге, на этапе осуществления привязки координатной сетки в плоскости дороги к координатной сетке в плоскости светочувствительной матрицы производят определение параметров перспективной проекции с использованием данных о положении и скорости ТС, полученных одновременно от радара и от видеокамеры, и на основании этих параметров определяют скорость ТС по смещению координат ГРЗ. Уточнение параметров перспективной проекции предпочтительно производят периодически через заранее установленные интервалы времени и в случаях, когда величина погрешности измерений выходит за пределы заданной, автоматически включают радар для дополнительного уточнения параметров перспективной проекции. В качестве результатов измерений скорости и положения ТС предпочтительно используют данные, как от радара, так и от видеокамеры в результате анализа изображения. Радар выполняется с возможностью одновременного измерения скорости, дальности, азимута и габаритов транспортного средства и содержит передатчик, по меньшей мере, два приемника и модуль цифровой обработки сигналов. Поле обзора радиолокатора предпочтительно согласовано с зоной распознавания ГРЗ, которую обеспечивает видеокамера. Данный способ позволяет существенно снизить затраты на периодическое проведение ручной калибровки, а также существенно уменьшить необходимые для работы системы энергетические и вычислительные ресурсы, за счет кратковременно подключения радара только тогда, когда необходима коррекция. Полученный технический результат достигается за счет того, что калибровка предложенного метода измерения производится в полностью автоматическом режиме на основе данных от радара и от видеокамеры. Калибровка обеспечивает автоматическое определение параметров перспективной проекции для последующего измерения скорости и положения ТС только по его изображению на видеокамере без использования радара.
В изобретении-аналоге RU 2557667 С2 (Мустафин Р.Г.) предполагается устанавливать на транспортном средстве активные или пассивные радио-метки RFID (радиочастотная идентификация), встраивающие в отраженный радиосигнал, с помощью которого производится измерение скорости ТС, информацию о транспортном средстве.
Принципиальные недостатки существующих способов измерения скорости ТС.
Следует заметить, что в изобретениях-аналогах имеется возможность вмешательства оператора или сторонних факторов в процесс измерения путем смещения оптической оси видео-камеры или направления луча радара после процесса их калибровки. Это не позволяет рассматривать данный способ, как автоматический способ измерения скорости.
Ближайший аналог использует комбинированный способ измерения скорости транспортного средства. На начальном этапе в данном способе используются микроволновые измерения дальности и доплеровской скорости транспортного средства, массиву данных которых сопоставляются координаты и быстрота перемещения изображений на матрице видеокамеры от кадра к кадру. На основании этого сопоставления система координат, привязанная к плоскости дороги, приводится в соответствие с системой координат матрицы. После этого этапа необходимость в микроволновой части, согласно описанию данного изобретения, якобы отпадает, и все измерения скорости транспортного средства осуществляются на основании анализа изображений ТС на матрице видеокамеры. Следует заметить, что точность сопоставления системы координат (виртуальной координатной сетки) на дороге с системой координат на матрице определяется точностью измерений, выполняемых микроволновым блоком, размером элемента дороги, соответствующего одному пикселю, точностью измерения времени и характера формирования кадра (последовательности записи пикселей) записи во времени. Среднеквадратичная ошибка измерения скорости ТС по величине доплеровского сдвига определяется среднеквадратичной ошибкой измерения доплеровской частоты, которая в свою очередь определяется длительностью измерительного импульса и ошибкой измерения угла между направлением радиус вектора от излучателя на ТС и направлением скорости ТС. При длительности зондирующего импульса 25 миллисекунд ошибка измерения доплеровской частоты составляет 40 Гц. Это дает ошибку измерения радиальной скорости (компоненты скорости вдоль радиус-вектора ~1 км/ч. Для получения истинной скорости ТС радиальную скорость нужно умножить на обратный косинус угла между направлением скорости ТС и радиус-вектором на ТС. Поскольку достоверно определить место на ТС от которого отражается принимаемый детектором сигнал невозможно, то угловой размер ТС с места расположения видео-камеры с учетом степени неопределенности расстояния до ТС составляет (а/r ~ 1/20, где а - размер прямоугольной проекции ТС на плоскость матрицы, r - расстояние до ТС, около 2-3 градусов. При установке прибора вблизи дороги базовый угол составляет 5-10 градусов, что дает среднеквадратичную погрешность порядка (2/10) 20% от измеренной скорости ТС.
Следует особо подчеркнуть, что для соблюдения принципа презумпции невиновности привлекаемый к административной ответственности должен, во-первых, иметь техническую возможность контролировать этот параметр, а во вторых, точность измерения критического параметра (в данном случае скорости ТС), на основании которого производится привлечение к административной ответственности, должна гарантировать, что измеренное значение критического параметра находится в доверительном интервале, исключающим значения параметра, по которым привлечение к административной ответственности не производится, (прим.: т.е. событие «попадание истинной скорости ТС вне доверительного интервала измеренных скоростей» является невероятным событием). В случае нормального (гауссова) распределения ошибок измерений, доверительному интервалу шириной в среднеквадратичную ошибку (в стандартной записи V±ΔV), соответствует доверительная вероятность w1=0.683; двойному доверительному интервалу V±2ΔV w2=0.955; тройному доверительному интервалу V±3ΔV w3=0.997. Это общеизвестные сведения из теории ошибок измерений физических величин (см. источники [14, 15]).
Доверительная вероятность того, что результат измерения, используемый в качестве обвинительного, попадает в установленный доверительный интервал, должна быть такой, чтобы вероятность ошибочного привлечения к ответственности на основании данных измерений за время использовании данного метода измерения была близка нулю. Если взять общий объем штрафов 50 млн. штрафов в год, 20 лет - длительность применения метода, то, приняв вероятность того, что в данной совокупности штрафов окажется 1 ошибочно привлеченный к ответственности, равной 0.1, получаем вероятность того, что результат измерения скорости ТС выйдет за пределы доверительного интервала, должна составлять менее (или хотя бы порядка) 10-10. Этой вероятности соответствует доверительный интервал примерно равный 10 среднеквадратичным погрешностям, 10ΔV. Таким образом, при среднеквадратичной ошибке, декларируемой в изобретении- аналоге RU 2559418 С2 ΔV ~ 3 м/с (~10 км/ч) доверительный интервал, соответствующий достоверному попаданию измеренной скорости в этот интервал есть величина около 100 км/ч. Это делает бессмысленным применение данного изобретения и прибора, действующего на его основе, с правовой точки зрения, т.е. с точки зрения гарантии соблюдения презумпции невиновности. Это же касается используемых для контроля ТС всех существующих измерителей, для которых декларируются среднеквадратичные погрешности ±2-3 км/ч (или 2-3% на скоростях свыше 100 км/ч). Для них доверительный интервал, гарантирующий соблюдение презумпции невиновности составляет минимально 20-30 км/ч. Это не случайно близко к значению превышения скорости, допускаемого ст. 12.9 КоАП РФ. Т.е. законодателем такая проблема замечена была и была разрешена несколько неуклюжим образом. Таким образом, отсутствие наглядности в представлении результатов измерений и недостаточная точность приборов, используемых для контроля дорожного движения, вынуждает отказываться от принципа презумпции невиновности либо нарушать безопасность движения, делая бессмысленными применяемые ограничения. На разрешение этой коллизии направлено заявляемое изобретение.
3.2.4.3. Сущность изобретения.
Как уже отмечалось, измерение скорости ТС производится в системе координат связанной с измерительным прибором. По этой причине во всех случаях производится измерение скорости не самого транспортного средства, а измерение скорости движения проекции транспортного средства. При этом наиболее сложной и не разрешенной проблемой является учет пространственного расположения вектора скорости движения ТС. Эта проблема является главным препятствием к тому, чтобы рассматривать применяемые измерители скорости, как мобильные (не стационарные) автоматические измерители. В первоначальных вариантах фото-радаров для решения проблемы неопределенности угла между лучом радара (который сам обладает достаточно большой для необходимой точности расходимостью 4 градуса) предлагалось устанавливать фото-радар под определенным углом к дорожной разметке на ее прямолинейных участках. Но это необходимое для точности измерения условие нарушалось, как операторами фото-радаров, устанавливающих их не в штатные позиции, и не на прямолинейных участках, так и «рысканием» скорости ТС в пределах полосы движения или при перестроении в другую полосу. Таким образом, на данный момент существующие фото-радары для измерения скорости ТС используют скрытые операции, через которые возможно влияние сторонних факторов, в том числе операторов, на результат измерения и которые не могут быть проконтролированы в «ручном» режиме любым заинтересованным лицом. Предлагаемое изобретение снимает данные вопросы и делает процедуру измерения скорости ТС полностью прозрачной, автоматической и доступной для контроля лицом, привлекаемым к ответственности на основании данных измерений, а стоимость приборов, использующих исключительно заявляемый способ измерения в сотни раз дешевле. Из существующих средств наиболее близко подошли к решению данной проблемы комплексы Кордон-2М, Автодория, Кордон-Темп, представляющие для обозрения две фотографии ТС (см, [6, 17, 18], Фигуры 1, 2.) но, к сожалению, никак не связанные между собой.
Заявляемый способ определения основывается, не на стационарной системе координат, связанной с фото-радаром, а на локальной системе координат, связанной с самим транспортным средством, вошедшим в кадр видеокамеры. Вообще говоря, при любых поворотах легкового автомобиля линия порога между колесами находится, по крайней мере, в одной вертикальной плоскости с вектором скорости заднего колеса автомобиля. Т.е. эту линию можно взять в качестве оси координат, а среднюю точку на этой линии в качестве точки отсчета. Как правило, эта линия совпадает с вектором скорости и ее длину можно использовать, как масштаб вдоль названной оси координат. Длина названной линии (как и любой другой линии на автомобиле) известна из габаритного чертежа ТС, а также может быть измерена на самом автомобиле. Последующие кадры, отснятые в точно известные моменты времени, которые автоматически указываются на кадре с точностью не хуже 0.0001 сек, покажут смещение этой линии в другие моменты времени. Таким образом, при сравнении нескольких кадров мы имеем продольное смещение характерной линии в единицах длины этой линии, которое может быть легко пересчитано в скорость. При размере кадра 2500x3000 пикселей (7.5 Мпк) и при размере фотографируемой сцены по ширине захватывающей, примерно, две длины легкового автомобиля, т.е. около 6-8 м, получаем длину, приходящуюся на 1 пиксель, 2 мм. При неопределенности промежутка времени 0.0001 сек на фоне 0.05 сек, получаем неопределенность скорости 40 мм/сек или около 0.15 км/ч. И достоверное значение скорости попадает в доверительный интервал ±1.5 км/ч, что является соразмерным с точностью поддержания скорости, определяемой ценой деления на спидометре автомобиля (цена деления - 10 км/ч). Стандартным значением точности стрелочного прибора является величина около половины цены деления, но не менее 1/4. Поэтому, вообще говоря, требование поддержания водителем мощности двигателя и, соответственно, скорости автомобиля с точностью существенно отличающейся от данной величины является абсурдным. Таким образом, обвинить водителя в преднамеренном нарушении скоростного режима возможно только в случае, если отклонение измеренной скорости от установленной ПДД превышает 3-5 км/ч. Вместе с тем, среднеквадратичная ошибка измерения скорости измерительным прибором должна в этом случае быть не больше 0.5 км/ч. Полученные оценки указывают, что заявляемый способ измерения скорости ТС удовлетворяет данному требованию. Для целей измерения скорости может быть использована любая линия на корпусе транспортного средства в направлении его движения, длина которой может быть определена из габаритного чертежа или на самом автомобиле. Для используемых в настоящее время способов измерения скорости, в случае представления их результатов в паре последовательных фотографий с указанием на них промежутка времени с точностью 0.0001 сек, заявляемый способ может быть дополнением, позволяющим произвести проверку измерений и гарантирующим их достоверность.
Вместе с тем для целей моментальной оценки скорости ТС и ее возможного попадания в интервал запрещенных скоростей при автоматической фиксации требуется иметь универсальный эталон длины, находящийся в поле регистрации видеокамеры, поскольку определение габаритных размеров возможно только после идентификации марки ТС, связанной с его регистрационным номером и реальным изображением зафиксированного автомобиля.
Таким эталоном является колесо ТС, имеющее стандартный ряд типоразмеров: R12, R13, R14, R15…R20. В изобретении-аналоге частично используется в качестве стандарта (эталона) длины ширина номерного знака. Однако в заявляемом способе этот стандарт (эталон) использоваться не может, т.к. размеры номерного знака в направлении движения ничтожны и точность определения, связанная с ним, неудовлетворительна. Таким образом, для предварительной оценки и отбора ТС, подозреваемых в нарушении скоростного режима, в качестве стандарта длины используется размер колес и смещение ТС в кадре видеокамеры измеряется в единицах диаметра колеса вдоль направления смещения. При невозможности отнесения размера колеса к тому или иному типоразмеру по угловому размеру его вертикального диаметра, применяются 2-3 установленных типоразмера исходя из размера области в кадре, занимаемой автомобилем. Например, все легковые автомобили, входящие в кадр относят к типоразмеру R14, все грузовики к типоразмеру R18. В этом случае ошибка в оценке скорости будет составлять около 10% за счет неверного типоразмера, что вполне достаточно для целей предварительного отбора ТС, подозреваемых в нарушении скоростного режима. Кроме того, в режиме настройки оператором может быть введен типоразмер колес сфотографированного автомобиля и дальнейшее отнесение типоразмеров будет происходить автоматически по угловому размеру колеса. Данные действия оператора не могут рассматриваться, как влияние на результат измерения, т.к. служат лишь для предварительного отбора подозреваемых автомобилей и уменьшения объема дальнейшей работы оператора по выявлению ТС, действительно нарушивших скоростной режим. Окончательное определение скорости автомобиля производится по каскаду из 4 фотографий, которые, по сути, позволяют провести только по одному элементу кузова до 6 измерений самим подозреваемым и сделать независимую оценку параметров распределения вероятностей ошибок в данной серии измерений.
Применение данного способа определения условной скорости ТС в смартфоне с навигатором не требует его регистрации, как прибора, производящего фото-фиксацию подозреваемого в нарушении ТС, в качестве средства измерения, поскольку измерение скорости фактически производится обычными средствами измерения длины и времени. Таким образом, для применения смартфона с навигатором в качестве средства фиксирующего ТС, подозреваемого в нарушении ПДД, необходимо обеспечить получение смартфоном каскада фотографий с простановкой на каждой фотографии географических координат смартфона и относительного времени с точностью не хуже 0.0001 сек, а также немедленную отсылку полученных данных в электронное хранилище.
Возможность применения в заявляемом способе линейных оценок.
Очевидно, что вследствие законов тригонометрии и особенностей перспективной проекции, различные части, элементы конструкции кузова транспортного средства (ТС) отображаются на фотографии нелинейно, т.е. в различном масштабе, как и участки траектории, по которым движутся эти элементы. Однако, также очевидно, что в случае совпадения в моменты выполнения фотографий точки на траектории движения элемента кузова, соответствующей концу элемента с точкой, соответствующей его началу на более ранней фотографии, этот факт, зафиксированный на паре фотографий, будет означать, что перемещение ТС равно длине траектории между этими точками элемента кузова. Этот факт не зависит от качества объектива и вносимых им искажений и может быть использован для калибровки любой пары фотографий. Учитывая, что в перспективной проекции прямые линии на местности преобразуются в прямые линии на матрице (фотопленке), то возможно поставить в соответствие любую пару точек на реальном кузове ТС, тем самым, определив реальное расстояние между ними, паре точек на фотографиях. В этом случае точность определения скорости ТС будет определяться только разрешением матрицы (фотопленки). Процесс получения стробоскопических фотографий не может рассматриваться, как измерение скорости, а лишь как процесс фиксации движения ТС, его траектории и траектории движения элементов его кузова. Уже после фото-фиксации характера его движения измерение скорости ТС производится с помощью обычных средств измерения длины с учетом знания точных промежутков времени, когда были сделаны фотографии в каскаде. Доверительным интервалом, характеризующим точность такого измерения, следует взять среднеквадратичную погрешность приборов, с помощью которых водители контролируют скорость управляемых ими транспортных средств. В стандартном понимании это половина цены деления спидометра ТС. Цена деления составляет 10 км/ч. Таким образом, доверительный интервал, на основании которого можно судить о виновности или не виновности водителя в нарушении скоростного режима составляет ±5 км/ч. Доверительная вероятность результатов такого измерения (т.е. с доверительным интервалом ±5 км/ч), исходя из принципа презумпции невиновности, должна быть такой, чтобы появление ошибочно вынесенного штрафа во всей совокупности когда-либо вынесенных штрафов было невероятным событием. Таковым невероятным событием может считаться событие, имеющее вероятность хотя бы 0.1. При числе вынесенных штрафов, например, в 2016 г. около 50 миллионов, и полагая длительность этих измерений хотя бы 20 лет, получаем, что вероятность выхода результата измерения за пределы доверительного интервала ±5 км/ч должна быть 10-10. Исходя из нормального распределения ошибок измерений, это означает, что среднеквадратичная погрешность метода измерения и прибора, производящего измерения, должна быть не хуже ±0.5 км/ч. На сегодняшний день приборов, гарантирующих такую среднеквадратичную погрешность, не имеется. Предлагаемый способ определения скорости ТС призван восполнить этот пробел. Существующие измерители скорости ТС, имея реальные (а не декларируемые производителем) средне-квадратичные погрешности в 2-3% от измеренной скорости, обеспечивают доверительный интервал, гарантирующий соблюдение принципа презумпции невиновности, величиной в 20-30 км/ч. Это с большим трудом удовлетворяет требованиям безопасности. Точнее, им не удовлетворяет.
Таким образом, констатируем, что доверительный интервал измерения, на основании которого производится привлечение лица к административной ответственности, определяется точностью приборов, посредством которых это лицо имеет возможность контролировать измеряемую величину, а доверительная вероятность определяется вероятностью нарушения принципа презумпции невиновности во всей совокупности измерений данным методом. Сформулировав требование к погрешности заявляемого способа, как ±0.5 км/ч (~±0.5% от 100 км/ч), оценим возможность его удовлетворения.
Если принять за стандарт съемку 4-х последовательных фотографий (см. Фигуру 3.) с промежутком между ними 0.02 сек, то при скорости ТС 250 км/час за время 0.06 сек ТС сместится на ~4.2 м (примерно длина кузова легкового автомобиля) При расстоянии до ТС 35 м все манипуляции с измерениями на фотографии будут проходить в диапазоне углов (с запасом) ±5° (угловая апертура фото- или видеокамеры), который характеризуется нелинейностью около 0.1%. Т.е считая, что расстояния на фото пропорциональны расстояниям на местности мы ошибемся не более, чем на 0.2%. Кроме того, совпадение на фотографии начала и конца какого-либо характерного размера (элемента кузова) ТС устраняет и эту погрешность. При необходимости, также возможно провести строгий расчет смещений с учетом нелинейностей передачи расстояний с местности на фотографию. При этом следует заметить, что не имеет существенного значения, на каком участке дороги осуществляется контроль - прямолинейном или с поворотом. Все данные моменты фиксируются на фото и могут быть учтены в случае возникновения спора в расчете скорости движения ТС.
Если в теореме синусов в отношении сторона треугольника - синус противолежащего угла вместо синуса угла брать сам угол (в радианах), то для углов ±15° {(Sin0.26-0.26)/0.26 ~ 0.011} различие составит около 1%, в диапазоне ±10° различие составит {(Sin0.17-0.17)/0.17 ~ 0.0048}менее 0.5%, а в диапазоне ±5° - {(Sin0.09-0.09)/0.09 ~ 0.0013} около 0.1%. Диапазон ±10° соответствует фотосъемке легкового автомобиля «в борт» с расстояния 15 м. Оптимальной является съемка под углом 45±15° к направлению движения. При 30° между осью сцены и направлением скорости ТС проекция борта ТС и его смещения на плоскость матрицы уменьшается в 2 раза, что в 2 раза ухудшает точность измерения скорости ТС по фотографии по сравнению с фотографией, сделанной под утлом 90° к направлению движения. При 60° между осью сцены и направлением скорости ТС ухудшаются условия распознавания ГРЗ, поскольку в 2 раза уменьшается отношение ширины ГРЗ к его высоте. Тем не менее, рабочий диапазон углов съемки может быть расширен до 3-кратного ухудшения названных условий относительно наилучших. На границах диапазона 45±25° ухудшение либо точности (под углом 20° к траектории, используется для передвижных фото-радаров типа КРИС), либо распознаваемости (под углом 20° от нормали к траектории), в сравнении с направлением 45° происходит в 2.1 раза. Предельный угол, при котором теоретически ГРЗ может быть различен оценивается из следующих соображений. При высоте рельефа цифр на ГРЗ 2 мм, их ширине 50 мм, а промежутке между ними 12-15 мм, на фотографии белые промежутки полностью заслоняются черными цифрами при скользящем угле около 10°, даже для идеально плоской пластины ГРЗ.
Рассмотрим более подробно предлагаемый способ определения скорости ТС по фотографиям.
Условия получения фотографий. При вхождении в ТС в контролируемое поле, фото- или видео-камера может сделать четыре последовательных снимка (см. Фигуру 3) с промежутком, например, 0.02 сек (50 кадров в сек.) или 0.04 сек (25 кадров в сек), на каждом снимке отображается время его исполнения с точностью не хуже 0.0001 сек. Это соответствует точности измерения промежутка времени в пределах между последовательными фотографиями 0.5% в первом случае и 0.25% во втором; или по крайним фотографиям в серии, соответственно 0.2% и 0.1%.
Требования к фотографиям: Фотографии выполняются под углом 45°±25° с расстояния не менее 15 м до ТС, абсолютно неподвижной (контролируется неподвижностью фона на всех фотографиях) камерой с разрешением не менее 2000 пикселей на длину автомобиля или распознаваемого элемента его внешней конструкции кузова. Для протяженных грузовых автомобилей, очевидно речь может идти о его кабине и прилегающих элементах. Фотографии, в принципе, могут быть совмещены в один стробоскопический снимок, подобно изображенному на Фигуре 4а.
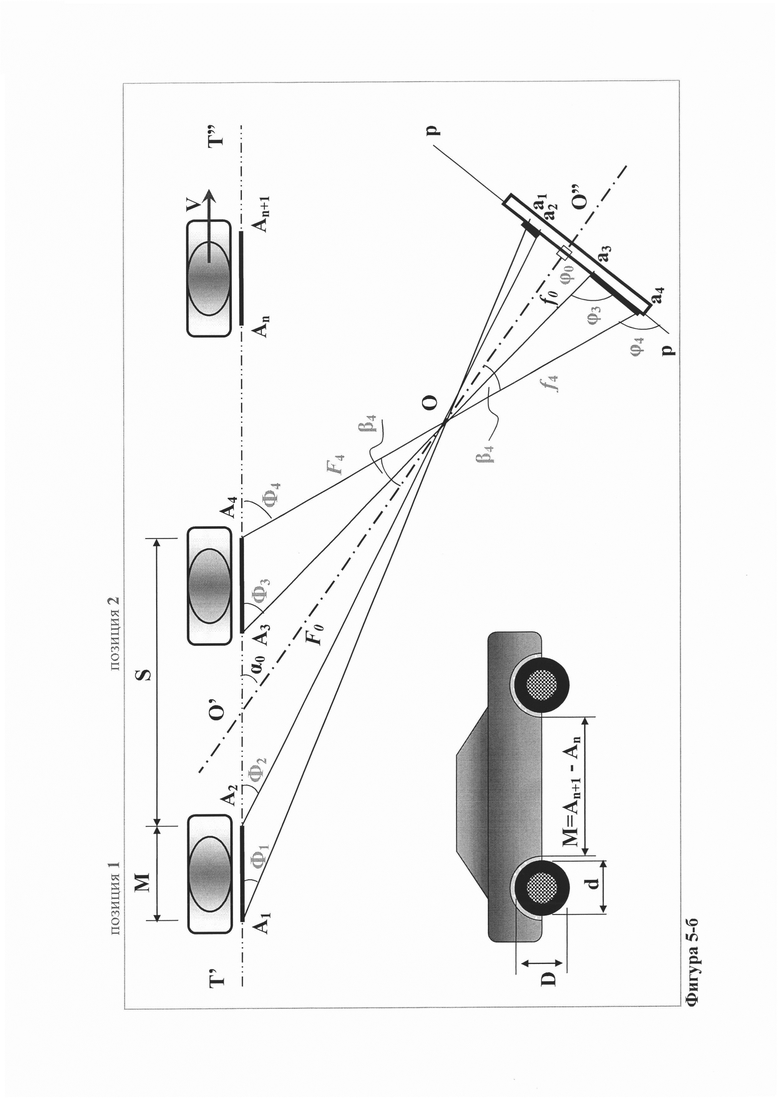
Итак, возьмем одну из 6 возможных парных комбинаций расположения ТС на фотографии и дороге (см. поясняющие рисунки Б-Г на Фигуре 3). Выберем на фотографиях этой комбинации в качестве эталонного элемент внешней конструкции кузова ТС, размер которого в направлении смещения может быть известен из габаритного чертежа, либо измерен непосредственно на автомобиле (например, порог, боковая дверь, заднее колесо). Очевидно, что все 4 точки на местности, соответствующие выбранным точкам на двух совмещенных фотографиях, лежат (см. Фигуры 4, 5) на одной прямой линии Т'-Т'' на Фигуре 5-б или tt (Т-М) на Фигуре 4 - траектории движения выбранных точек элемента кузова. Также очевидно, что эта линия и оптический центр объектива фото- или видеокамеры (обозначен буквой О) лежат в одной плоскости. Эта плоскость пересекая плоскость матрицы фотокамеры образует прямую линию рр, являющейся проекцией линии Т'-Т'' (tt). В этой же плоскости tt-O-рр находится линия О'-О'', проходящая через оптический центр О объектива, и перпендикулярная линии рр на матрице. Эту линию рассматриваем, как оптическую ось объектива, хотя в общем случае она таковой не является. Эта «оптическая» ось О'-О'' пересекает линию траектории под углом α0. Сразу оговоримся, что этот угол находится в пределах α0=π/4±π/8. Угол между осью О'-О'' и линией рр обозначим, как ϕ0 (Фиг. 5-б, на Фиг. 4 обозначение упущено). Как уже говорилось выше, ϕ0=π/2 и в штатном случае не может отклоняться от этого значения более чем за пределы угловой апертуры фотокамеры.
Обозначим положение крайних (ограничивающих) точек элемента кузова на траектории его движения на местности точками An, соответствующие им точки на матрице (фотопленке) камеры как аn. Точки пересечения линии О'-О'' с линиями tt и рр примем за начало координат для отсчета положения, соответственно, точек An на траектории и соответствующим им точек an на матрице. Угол между линией О'-О'' и линией An-an обозначим, как βn- Аналогично принятым обозначениям для углов, образуемых линией О'-О'', угол при вершине (точке) An обозначим, как Фn, а угол при вершине (точке на матрице) an, как ϕn. Также обозначим отрезки (и их длины) линии О'-О'' от оптического центра О до траектории как F0, а до матрицы, как ƒ. Аналогично отрезок (сторона треугольника) O-An, как Fn, отрезок O-an, как ƒn. Угол между линиями tt и рр обозначим, как θ. Тогда для углов, изображенных на Фигуре 4 треугольников очевидны соотношения
Фn+ϕn=π-θ, Фn=α0+βn ϕn=ϕ-αn и ранее указанные α0=π/4±π/8 ϕ0=π/2±π/20.
В принятых обозначениях координаты точки An на траектории через угол αn запишутся как

Для упрощения правой части выражения сделаем замену А*n=An/F0sin(α0) и получим

Котангенс суммы углов выразим через тангенсы парциальных углов, как
ctg (α0+βn)=(1-tgα0⋅tgβn) / (tgα0+tgβn)
(Г.Б. Двайт, Таблицы интегралов и другие математические формулы, М. Наука, 1977, стр. 74, формула 405.03 ctg (А-В)=(1+tgA tgB) / (tgA-tgB)

Аналогично, в принятых обозначениях координаты проекции точки An на матрице через угол βn запишутся, как

Заменяем в (3) значение угла βn, полученное из (4), как

Также заменяем координаты точки схода S as=ƒ0⋅tg (βs), где угол между осью отсчета O''O' и направлением на точку схода αs=-α0

Подставив выражения для углов (5) и (5') в выражение (3) и учитывая, что тангенс арктангенса аргумента равен аргументу, получаем выражение:
А*n=-ƒ0/as - [1+(as/ƒ0)(an/ƒ0)] / [-(as/ƒ0)+(an/ƒ0)], которое после упрощения выглядит следующим образом (на рисунке показана ситуация, когда as<0, т.е. отрицательна)

Делаем проверку этого полученного выражения для связи координаты на траектории с координатой на фотографии.
1. По определению, при приближении к точке схода на проекции (фотографии) (т.е. an→as - координата соответствующей точки на реальной траектории должна устремляться в бесконечность. А*n→∞, т.к. [as-an]→0, - знаменатель в выражении (6) стремится к нулю. Так оно и есть в выражении (6).
2. При устремлении координаты проекции на матрице an→+∞ (см. Фигуру 4) координата на реальной траектории приходит в точку Е. Преобразуем выражение (6), поделив числитель и знаменатель на an. При an→+∞ все члены, содержащие an в знаменателе стремятся к нулю.
А*n=-ƒ/аs - [(ƒ/an)+(as/ƒ)] / [(as/an) - 1]=-ƒ/as-as/ƒ. Эта величина соответствует точке на реальной траектории, в которую попадает линия проведенная через оптический центр параллельно линии проекции траектории на матрице, что поэтому соответствует бесконечному значению координаты точки на матрице (фотографии). Остающиеся члены ƒ0/as и as/ƒ0 соответствуют отрезкам O''D и DE и их сумма есть координата точки Е.
3. Ситуация, когда ось отсчета (оптическая ось) перпендикулярна траектории, соответствует тому, что as→-∞. В этом случае, поступив аналогичным образом, как в п. 2, получаем в правой части единственный член an/ƒ. Это соответствует простой пропорции An/F0⋅sin(α0)=an/ƒ для подобных в этом случае треугольников An-А0-O и an-а0-O.
Теперь, используя выражение (6), мы можем получить выражение для длин М отрезков траектории (порог, колесная база или иные элементы внешнего вида автомобиля) в двух положениях (в дальнем и ближнем) через их координаты на проекции. Еще раз для определенности укажем, что эти отрезки соответствуют, например, порогу автомобиля или отрезку между осями колес (колесная база).
Обозначим в дальнем (англ. far) положении эту величину М=Мƒ=А2-A1, а в ближнем (англ.-close) положении М=Mc=А4-А3

В обоих выражениях один и тот же член в квадратных скобках представляет собой константу W=D0(ƒ02+as2)/ƒ0 - масштабный параметр, характеризующий центральную проекцию. В фигурных скобках мы имеем дробь, в числителе которой находятся величины mƒ=(a2-a1) и mc=(а4-а3), представляющие собой длины названных отрезков на проекции (фотографии). В знаменателе данной дроби находятся величины типа d1-(as-a1), d2=(as-a2), d3=(а5-аз), d4=(as-a4), по смыслу являющиеся расстоянием на фотографии между точкой схода и соответствующими концами названных отрезков (порог, колесная база) в соответствующих позициях автомобиля (ближняя или дальняя). Таким образом, проблема с неточностью определения начала координат и процедура нахождения начала координат полностью отпадают. (Остается проблема, связанная с неточностью определения точки схода S проекций траекторий точек автомобиля на фотографии, которая решается вариацией величин d1,2,3,4 до получения одинаковых значений результатов расчетов ниже приведенным четырем эквивалентным формулам.)
В новых обозначениях выражения (7) и (7') запишутся следующим образом:

Масштабный параметр W из этих выражений представляется двояким образом:

Каждое из этих выражений для масштабного параметра может быть подставлено в выражения для перемещения S, которые мы можем записать аналогичным с М образом. Т.е. мы можем выразить реальные перемещения начала и конца отрезка, связанного с порогом автомобиля или его колесной базой, как S=Sb=А3-А1; S=Se=А4-А2 (нижние индексы около S: b - begin; е - end). Напомним, что. получив численное выражение величины S через известное М и поделив его на промежуток времени между моментами получения фотографий ближнего и дальнего положений автомобиля (или объединяющей стробоскопической фотографии), мы получаем скорость автомобиля. Из выражения (6) связи координат точек на реальной траектории и координат точек на ее проекции аналогичным с выражениями (7) образом получаем:


где sb=(а3-a1) и se=(а4-а2) есть перемещения, соответственно, начала и конца отрезка (порог, колесная база и др.) измеренные на фотографии (в мм, пикселях или других условных единицах)
При подстановке в (10) и (10') выражений для W из (9) и (9'') получаем четыре эквивалентных выражения, связывающих S с М через масштабный множитель, сформированный из величин, измеренных на фотографии:

В качестве подтверждения верности данных выражений отметим, что, если на фотографиях конец отрезка в ближней позиции совпадает с его началом в дальней позиции (т.е. точки А2, A3 совпадают, а расстояния d2=d3), то sb=mƒ, a se=mc, и получается S=М.
Скорость перемещения транспортного средства (ТС) в промежуток времени, между моментами выполнения фотографий определяется как отношение перемещения ТС в единицах длины любого выбранного элемента кузова ТС, имеющего протяженность вдоль его траектории движения и разницы между названными моментами времени. Истинная скорость ТС может быть определена после этого посредством умножения полученного значения скорости в единицах длины элемента кузова на его метрическую длину, полученную из габаритного чертежа или непосредственным его измерением. Очевидно, что для пары фотографий имеется большой набор элементов кузова ТС, в котором наиболее предпочтительным является выбор элемента, протяженность которого вдоль его траектории равна или близка к величине перемещения ТС. Важным моментом является в случае с механическим затвором или обтюратором фотокамеры учет неодновременности засветки ячеек матрицы, обусловленный особенностями движения кромки обтюратора.
Для построения более полной картины относительного расположения движущегося автомобиля и фотокамеры, в принципе, можно определить величины D0 (D0=F0⋅sin(α0)) и ƒ, после чего возможно определить все углы и стороны треугольников в плоскости построения. Для определения D0 и ƒ берем выражения для  и подставляем его в выражения (9) и (9'). Получаем систему двух уравнений с двумя неизвестными, из которой определяем расстояние от оптического центра объектива фотокамеры О до траектории tt автомобиля D0 и условное фокусное расстояние ƒ0 объектива, которое определяется масштабом (размером) фотографии, используемой для измерений расстояний. Дополнительно к этому мы можем определить в каждой зафиксированной позиции автомобиля угол an между осью автомобиля и оптической осью объектива фотокамеры по отношению длины b и ширины а автомобиля или его элементов в той же протяженности и их реальных размеров А и В (tgαn=(a/b)/(A/B)) либо по отношению максимального D и минимального d диаметров искаженных изображений каждого колеса. (sin αn=d/D).
и подставляем его в выражения (9) и (9'). Получаем систему двух уравнений с двумя неизвестными, из которой определяем расстояние от оптического центра объектива фотокамеры О до траектории tt автомобиля D0 и условное фокусное расстояние ƒ0 объектива, которое определяется масштабом (размером) фотографии, используемой для измерений расстояний. Дополнительно к этому мы можем определить в каждой зафиксированной позиции автомобиля угол an между осью автомобиля и оптической осью объектива фотокамеры по отношению длины b и ширины а автомобиля или его элементов в той же протяженности и их реальных размеров А и В (tgαn=(a/b)/(A/B)) либо по отношению максимального D и минимального d диаметров искаженных изображений каждого колеса. (sin αn=d/D).
Как отмечалось выше в случае достаточно малой угловой апертуры фотокамеры допустимы линейные оценки, хотя координата точки на выбранной траектории элемента кузова автомобиля нелинейно связана с координатой ее проекции на матрице фотокамеры. Однако, для каждой траектории существует свой набор констант F0, ƒ0, α0, которые необходимо определять при калибровке прибора. Это является причиной недостаточной точности измерения и обуславливает сложность процесса измерения скорости транспортного средства любым методом, что в свою очередь обуславливает сложность прибора и его стоимость.
Сложность прибора и используемых для его функционирования процессов также является причиной того, что эти процессы сложны для понимания лицами, привлекаемыми к ответственности, и не могут быть ими проконтролированы на предмет соблюдения их прав. Заявляемый способ представляется простым для понимания, не содержит скрытых процессов, влияющих на результат измерения, и этот результат может быть легко проконтролирован любым лицом по предлагаемой методике.
Все известные способы измерения скорости ТС основываются на измерении положения ТС в определенные моменты времени в системе координат прибора (наблюдателя). При этом используются различные виды инвариантов, обеспечивающих сравнение измеренных величин с эталонами. Это делается либо посредством измерения моментов времени прохождения транспортным средством определенных рубежей (комплексы «Автодория», «Азимут», инвариант - пройденное расстояние), либо определения скорости и расстояния до ТС локационными способами (комплексы «Кордон», «КРИС», инвариант - скорость света, ориентация), либо посредством определения расстояния до гос. регистрационного знака, используемого как инвариант, размещенный на транспортном средстве (Комплекс «Азимут», изобретение-аналог).
Несомненным достоинством данных приборов является использование универсального инварианта, размещенного на самом транспортном средстве. В то же время существенным их недостатком, снижающим точность измерений, является применение в качестве инварианта пластины ГРЗ, имеющего не значительные размеры вообще, и ничтожные размеры в направлении перемещения ТС, что не позволяет использовать его в качестве непосредственного эталона измерения. В заявляемом изобретении предлагается в качестве эталона перемещения использовать элементы кузова, имеющие протяженность в направлении перемещения ТС и размеры которых известны либо из габаритных чертежей, либо могут быть измерены непосредственно на ТС, либо являются стандартизованными (колеса, ГРЗ). Колеса, диски, гос. регистрационный знак в заявляемом изобретении используются в качестве эталонов для предварительного отбора нарушителей и фото-фиксации подозреваемых в совершении правонарушения ТС. Дальнейшее уточнение, гарантирующее соблюдение принципа презумпции невиновности, производится на основании обосновываемой ниже еще более простой методики с использованием габаритных данных о размерах элементов кузова ТС.
Обозначим, как и ранее, протяженность (длину) элемента кузова ТС, известную из габаритного чертежа или непосредственного измерения, как М*, или как М*1 и М*2 его размеры в системе координат дороги, соответствующим первой и второй фотографиям (см. Фигуру 5, 3Г). Очевидно, что

и М*1=М*2=М*/2.
Аналогично обозначим перемещения соответствующих точек А1 и A2, как

и S*1=S*2=S*/2.
Аналогичные величины на матрице фото-камеры будут:
m1=a1-a2, a m2=a4-a3, s1=а3-a1 и s2=a4-a2. При том m1≠m2, a s1≠s2 и очевидно, что ни одна из величин m1, m2, не может быть при строгом рассмотрении применена в качестве эталона для измерения величин s1 и s2.
Однако, если сконструировать (составить) величины S*=S*1+S*2 и s=s1+s2 из перемещений, M*=M*1+M*2 и m=m1+m2 из протяженностей элемента кузова ТС, то величины М* и m можно использовать, как эталоны высокой точности.
Просуммировав выражения типа (11) и выделив в полученном выражении величины М*, m, S* и s, получим, что отношение S*/M* практически не отличается от отношения s/m.
Следует подчеркнуть, что в случае, при любых S и М, если S=M, то на фотографии также будут s1=m1≠m2=s2, но s1+s2=s=m=m1+m2. Т.е. поправочный коэффициент между S*/M* и s/m в точности равен 1.
Это означает, что отношение s/m, полученное из фотографий в системе координат матрицы в точности равно отношению S/M в системе координат дороги. Определение этого отношения не связано с применением сертифицированных измерительных приборов и может быть выполнено, как по фотографии достаточного размера с помощью измерительной линейки, так и подсчетом пикселей, укладывающихся на соответствующих участках траектории элемента кузова ТС. При длине элемента кузова около 2000 мм и разрешении фотоснимка 1 пиксель на 1 мм для промежутка между фотографиями (кадрами в видеопотоке) 0.04 сек (0.02 сек), получаем погрешность измерения скорости (в отсутствие погрешности измерения промежутка времени) около 25 мм/сек (50 мм/сек) или 0.09 км/ч (0.18 км/ч). Полагая, что измерение промежутка времени и указание на фотографии момента ее получения с точностью 10-4 сек, имеем дополнительную погрешность в величине скорости около 0.25% (0.5%) от измеренной величины скорости. Эта погрешность должна быть сложена с погрешностью, связанной с измерением перемещения (по известному правилу [14, 15] квадратов погрешностей) и для скорости 100 км/ч составит 0.27 км/ч (0.53 км/ч).
Для гарантированного соблюдения в измерении презумпции невиновности требуется доверительный интервал ~10 среднеквадратичных погрешностей, т.е. 2.7 км/ч (5.3 км/ч). Учитывая, что водитель может контролировать скорость ТС с точностью около 5 км/ч, то соотношение данных величин погрешностей представляется весьма разумным. Вместе с тем видно, что для съемки 25 кадров/сек может быть уменьшено разрешение камеры в 2 раза. Учитывая, что угол α0 между траекторией и оптической осью камеры около 45°, разрешение должно быть увеличено в 1.5 раза. Т.е. при размере снимаемой картины в длину 6 м 1 пикселю должно соответствовать 1.5 мм или необходима матрица размером 2500×4000 пикселей (10 Мпк). Такое разрешение имеют камеры современных смартфонов. Это означает, что с задачей контроля скоростного режима вполне может справится смартфон, переводя затраты на производство соответствующего оборудования в совершенно другую категорию - почти в тысячу раз дешевле.
Способ не требует автоматического исполнения измерений без участия оператора для соблюдения принципа презумпции невиновности. При условии точного измерения и указания промежутков времени между моментами получения фотографий (кадров) данный способ определения скорости ТС понятен всем и его результат может быть самостоятельно проверен любым лицом со средним образованием. Автоматизация необходима только в целях облегчения работы по отбору эпизодов правонарушений и предотвращению коррупционных действий обслуживающего персонала, но никак не в целях обоснования нарушения принципа презумпции невиновности. В автоматическом исполнении обработка каскадов фотографий происходит в два этапа. На первом этапе происходит отбор ТС, подозреваемых в нарушении скоростного режима, на основании данных получаемых существующими средствами автоматического контроля, либо на основании определения относительного смещения универсальных элементов внешнего вида любого ТС, каковыми являются колеса, диски колес (нескольких типоразмеров, определяется смещение в единицах диаметра и направление траектории по отношению к оптической оси камеры), пластина ГРЗ (определяется угловая скорость по углу поворота ГРЗ и расстояние в единицах размера его длины).
Таким образом, по п. 1 формулы изобретения заключаем, что согласно «Универсальному способу фото-фиксации нарушения ПДД» (см. фигуру 3) нарушение ПДД фиксируется 4 последовательными фотографиями с разрешением ~1 мм пространства дорожного полотна на 1 пиксель матрицы фото- или видео-камеры, выполненными через определенные промежутки времени в зависимости от характера фиксируемого правонарушения (по местоположению ТС, по маневру ТС, по скорости ТС). В случае фиксации нарушений скоростного режима фотографии выполняются неподвижной камерой через короткие промежутки времени предпочтительно под 45° к направлению движения ТС. Первичным основанием занесения эпизода в базу данных подозреваемых в совершении правонарушения, предусмотренного ст. 12.9 КоАП РФ является смещение положения ТС в кадре в единицах диаметра колеса ТС более заданного смещения, в соответствии с ограничениями скорости на контролируемом участке. На каждой из четырех фотографий в каскаде указывается: с точностью до 1-5 м географические координаты камеры, выполнившей фотографии; одно из 8 направлений объектива (север, северо-восток, восток, юго-восток, юг, юго-запад, запад, северо-запад); точное относительное время исполнения фотографий с точностью до 0.0001 сек; дата; ограничение скорости на контролируемом участке. В дальнейшем по виду на фотографии и данным регистрации (по ГРЗ, VIN) определяется тип ТС, на основании типа ТС определяются размеры элементов его кузова, которые принимаются в качестве эталонов. По каждой парной комбинации фотографий из 4 в каскаде и данным габаритного чертежа ТС рассчитывается перемещение ТС в единицах длины выбранного элемента кузова (предпочтителен выбор элемента, длина которого близка или равна перемещению ТС в кадре). Для этого измеряется длина элемента кузова между точками на его траектории на каждой из фотографий в паре и суммируется. Таким образом, получаем величину m=m1+m2. По фотографиям измеряем смещение начала элемента s1 и его конца s2. Также суммируем и получаем величину s=s1+s2. Взяв отношение s/m получаем смещение ТС в единицах длины элемента его кузова. Умножив это отношение на длину элемента получаем смещение ТС за время между фотографиями S, Вычислив промежуток времени между фотографиями, как Δt=t2-t1 рассчитываем скорость ТС, как V=S/Δt. И так для каждой из 6 пар фотографий. Рассчитываем среднее арифметическое значение, определяем отклонение каждого из 6 значений и по ним рассчитываем среднеквадратичную ошибку ΔV. Для соблюдения принципа презумпции невиновности данная величина должна быть меньше 1/10 разницы между средним арифметическим значением скорости и величиной ограничения скорости, т.е. ΔV<(V-Vогр)/10 либо, иначе говоря, величина ограничения скорости не должна попадать в интервал шириной в 10-кратную среднеквадратичную ошибку около среднего значения измеренной скорости. В противном случае имеется вероятность, что действительное значение измеренной скорости меньше величины ограничения скорости и нарушается принцип презумпции невиновности. Величины среднеарифметического значения определенных из фотографий скоростей и средняя квадратичная ошибка из их совокупности вместе с общими формулами расчета указываются в постановлении о привлечении к административной ответственности. В рамках действующего законодательства представляется допустимым отнести проверку значений величин на заинтересованную сторону - привлекаемое лицо. Изложенный алгоритм является более простым и более точным, чем вычисления и процедуры обработки фотографий применяемые в способах и комплексах, упомянутых в разделе «Уровень техники». Отрезок траектории элемента кузова, на котором она лежит, определяемый по двум точкам всегда лежит в одной плоскости с центром проекции (оптический центр объектива) и проекцией этого отрезка на матрицу фото-камеры, что предельно упрощает расчеты. Это не вызывает сомнений в возможности осуществления изобретения в этой части.
Второй частью изобретения является идея, что информацию о скорости ТС можно также получить не только зная его габаритные характеристики и находясь в связанной с ним системе координат, но и используя циркулирующую в его системах и устройствах информацию. В данном случае просто зафиксировав в конкретном месте информацию, получаемую с его же датчиков. В настоящее время в современных автомобилях на приборную доску и бортовой компьютер с датчиков выводится информация о скорости, пробеге, температуре и оборотах двигателя, уровне топлива, времени в цифровом виде. Широко распространены технологии передачи данных WiFi, Bluetooth. Не составляет труда создать специализированный стандарт представления этих данных для целей контроля за дорожным движением. С точки зрения загрязнения города радиоволновым шумом от многочисленных автомобилей предпочтительным является применение для передачи данных от автомобиля направленного ИК-излучения. Все что нужно для этого: производители автомобилей и бортовых компьютеров должны начать выпуск приборных досок и бортовых компьютеров, снабженных модулями, передающими значения ряда параметров датчиков автомобиля по стандартным каналам связи, например, Wi-Fi, а производители устройств, контролирующих движение ТС, должны снабдить выпускаемые ими приборы модулями, принимающими эти сигналы из области контроля. Очевидно сигнал должен быть в стандартизированной форме и его пакет должен содержать информацию о VIN транспортного средства (а также о номере водительского удостоверения управляющего им водителя). В изобретении-аналоге RU 2557667 C2 (см. источник [7]) предлагалось снабдить автомобили пассивными и активными RFID метками для их идентификации по радиосигналу. В настоящем изобретении предлагается расширить функции подобных устройств по передаче данных с транспортного средства (ТС) в плане объема передаваемой информации (данные о ТС, его приборах, водителе) и рабочих частот (СВЧ, ИК, видимый свет) и заменить измерение скорости ТС внешним прибором получением информации с датчиков самого ТС посредством серийно устанавливаемых на ТС модулей (ТМ), транслирующих данные, которые видит водитель ТС на контролирующих приборах. В этом случае практически отпадает вопрос о соотношении ошибки измерения и принципа презумпции невиновности. Кроме того, контроль за ТС могут осуществлять приборы сопоставимые по сложности, размерам и цене с недорогими смартфонами. А также их функции полностью смогут на себя взять существующие смартфоны, способные подключаться к названным каналам связи. В более сложном исполнении эти транслирующие модули (ТМ), серийно устанавливаемые на ТС и их бортовые компьютеры могли бы принимать сообщения, относящиеся к данному ТС, из системы контроля за дорожным движением и от других участников движения. Заявляемый способ может быть применен во всех существующих комплексах фото- и видео-фиксации, посредством представления парных фотографий и выведения в прилагаемую к фотографии информацию точных координат и точного (до 0.0001 сек) времени получения фотографий.
3.2.4.4. Перечень фигур, чертежей и иных материалов.
Фигура 1. Пример представления доказательного материала в комплексе Кордон-2М
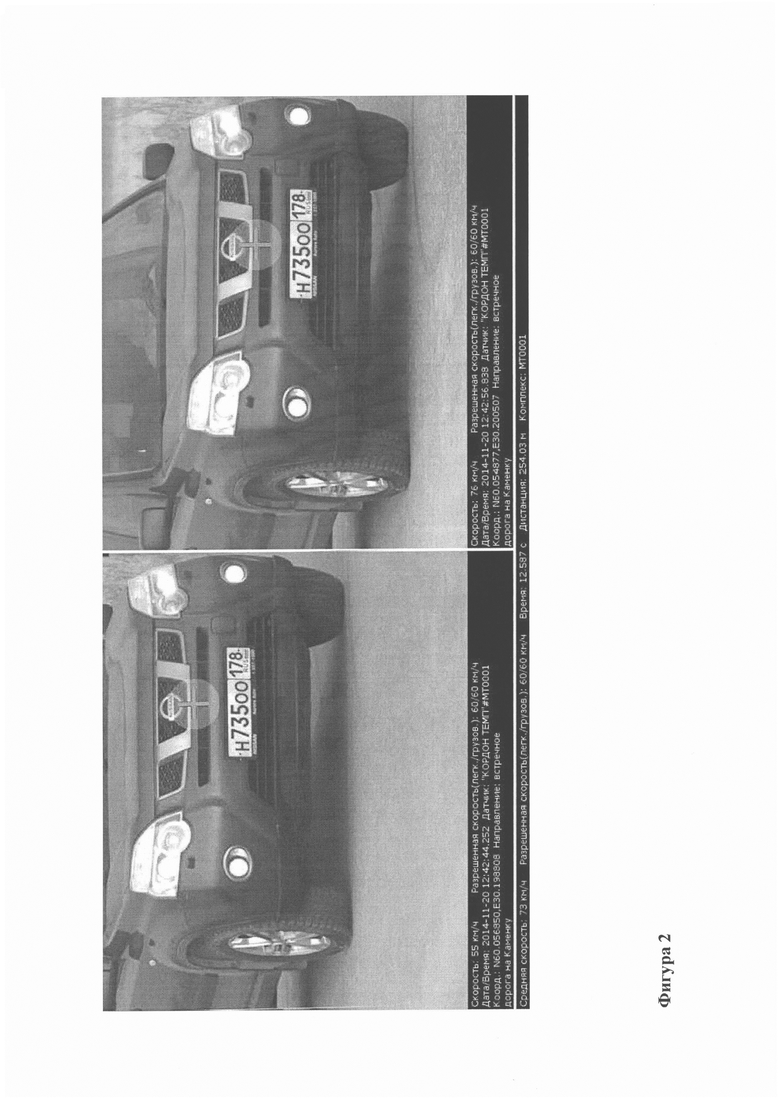
Фигура 2. Пример представления доказательного материала в комплексе Кордон-Темп
Фигура 3. Схема представления доказательного материала в заявляемом изобретении.
Фигура 4. Схема построения и преобразования системы координат на дороге и матрице цифровой или аналоговой фото- или видеокамеры.
Фигура 5. а) Схема нахождения точки схода S. б) Схема расположения транспортного средства (ТС) и прибора, фиксирующего событие прохождения ТС
3.2.4.5. Сведения, подтверждающие возможность осуществления изобретения.
В раздела 3.2.4.3 указаны требования к разрешению фотографий и точности измерения промежутков времени. Эти требования современными приборами (Автодория, Азимут и др. удовлетворяются), однако данные приборы не используют все возможности, заложенные в получаемые ими фотографии. Поскольку все измерения можно сделать в рамках возможности смартфона, то реализация заявляемого способа удешевляет технический результат примерно в 1000 раз, увеличивает точность в 10 раз и, самое главное, характеризуется абсолютным соблюдением принципа презумпции невиновности и отсутствием скрытых от подозреваемого в совершении правонарушения приборных процессов.
В расширенном варианте заявляемого изобретения предполагается вместо RFID-метки на транспортное средство при его производстве (либо при установке на него бортового компьютера), например, устанавливать ИК-маячок (светодиод на лобовом стекле перед внутри салонным зеркалом заднего вида либо иные варианты с установкой двух-четырех светодиодов, высокочастотной модуляцией света ходовых огней, фар) постоянно транслирующий кодированный сигнал, содержащий VIN транспортного средства и показания его датчиков (минимально - показания спидометра в км/ч, пробег в метрах, время в десятых долях секундах). (Такого рода технологии в настоящее время используются повсеместно, в каждом доме - взять, к примеру, пульт управления телевизором, кондиционером, WiFi в компьютерных сетях, Bluetooth. Т.е. это недорогие и массовые в реализации технологии.) Эти данные заносятся в сообщение о правонарушении. В перспективе, при использовании водительских удостоверений с микрочипом, например, в качестве ключа зажигания, в сообщение о правонарушении могут быть занесены данные о водительского удостоверения. В этом случае отпадет необходимость в ст. 26.1 КоАП РФ, привлекающей к административной ответственности не лицо, совершившее правонарушение, а владельца транспортного средства. В целом, заявляемое изобретение, уходя от прямого измерения скорости все более усложняющимися приборами, позволяет удешевить процесс получения значимой в правовом отношении информации о поведении ТС почти в тысячу раз и в десять раз увеличить его точность и достоверность.
10.7.4.4. Краткое описание чертежей
Фигура 1. Пример представления доказательного материала в комплексе Кордон-2М. На фигуре показаны два кадра с автомобилем, сделанных комплексом Кордон-2М. Хорошо видно смещение автомобиля в кадре. Если в сопровождающей кадры информации время было бы указано для каждого кадра с точностью до 0.0001 сек, то измерив обычной линейкой с точностью до 0.1 мм, длину порога и его смещение вдоль самого себя, лицо привлекаемое к административной ответственности смогло бы само удостовериться в правильности оснований привлечения, либо доказать обратное.
Фигура 2. Пример представления доказательного материала в комплексе Кордон-Темп. На фигуре показаны два кадра с автомобилем, сделанных комплексом Кордон-Темп: на въезде на контролируемый участок и выезде с него. Время выполнения каждой фотографии указано с точностью до 0.001 сек. Указано расстояние между точками контроля, которое привлекаемое лицо, однако, измерить не может. При наличии второй фотографии по каждому эпизоду привлекаемое лицо могло бы убедиться в правильности значений скорости указанных в сопровождающей кадры информацией. Пример также показывает о возможности представления о данных о промежутке времени между фотографиями с точностью 0.0001 сек, поскольку указанные на фото с точностью до 0.001 сек моменты времени относятся к времени, синхронизированному с глобальным.
Фигура 3. Схема представления доказательного материала в заявляемом изобретении. На вкладке 3-а представлены 4 последовательных фотографии, связанные с фиксацией нарушения ПДД. В случае фиксации нарушения скоростного режима фотографии делаются в течение короткого промежутка времени, пока ТС проходит контролируемую зону. В случае иных нарушений ПДД размер контролируемой зоны может быть больше и захватывать всю область маневра, совершаемого ТС. Соответственно промежутки между кадрами увеличиваются. На вкладке 3-б представлены 6 парных комбинаций фотографий, которые могут применяться при определении смещения ТС. На вкладке 3-в представлен пример габаритного чертежа ТС, который может быть использован для измерения скорости ТС. На вкладке 3Г показаны примеры определения перемещения s и длины эталонного элемента кузова на фотографиях. При этом перемещение автомобиля в единицах длины элемента кузова определяется упрощенном виде, как S/M=(s1+s2)/(m1+m2), скорость как V=S/(t2-t1), где t2, t1 - моменты времени для соответствующих положений автомобиля. Квадрат относительной погрешность измерения скорости определяется как сумма квадратов относительных погрешностей определения времени и определения перемещения, связанного, главным, образом с разрешением камеры, а не с точностью изготовления элемента кузова.
Фигура 4. а) Схема преобразования системы координат на дороге и матрице цифровой или аналоговой фото- или видеокамеры.
Т-М (или tt) - линия, содержащая отрезок траектории элемента кузова транспортного средства (ТС), взятого в качестве эталона длины. Точка О'' имеет координату А0=0, точка Tn - координату An, положительное направление оси координат на траектории показано стрелкой. О'-О''- оптическая ось, пересекающая линию траектории и проходящая через оптический центр объектива О (центр проекции). Эти две линии лежат в плоскости, пересекающей матрицу фото-камеры по линии рр и содержащей проекцию an точки An на траектории движения элемента кузова. Ось О'-О'' близка к нормали к плоскости матрицы и пересекает линию траектории под углом 45°±25°. На основании этого построения и подобия прямоугольных треугольников O'O''М, OO'D, OED, MDM', OSM' представленных на схеме треугольников рассчитывается взаимосвязь координат на траектории и координат на ее фотографической проекции. Подробности в тексте описания изобретения.
Фигура 5. б) Схема нахождения точки схода S. Аналогично линии могут быть проведены через любые идентичные точки на кузове автомобиля, а) Схема расположения транспортного средства (ТС) и прибора, фиксирующего событие прохождения ТС На рисунке схематически показан габаритный чертеж транспортного средства (ТС) и положения ТС вдоль траектории движения по линии Т'-Т''. Два положения, характеризуемые координатами начала и конца элемента кузова (здесь порог) A1, А2 и А3, А4 на траектории, а1, а2 и а3, a4 на матрице соответствуют положениям зафиксированным неподвижной камерой на двух фотографиях из каждой комбинации Фигуры 3. Из каждой фотографии определяется длина элемента кузова вдоль траектории движения и берется среднее между ними (величина m). Из сравнения положения начала и конца элемента кузова определяется его среднее смещение s. Из отношения s/m умноженного на длину элемента кузова и поделенного на промежуток времени между фотографиями находится скорость ТС. На габаритной схеме обозначен вертикальный и «горизонтальный» диаметры колеса различными буквами, чтобы подчеркнуть, что на фотографии это различные величины, позволяющие определить угол между направлением движения и направление съемки. Подробности в тесте описания.
Список литературы, излагающей уровень техники изобретения
1. Осипов C.K. (RU), Малинкин (RU) А.Ю., Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения и устройство для его осуществления» («Стрелка»), изобретение RU 2382416 С2, приоритет 20 Март 2008, опубл. 20.02.2010, https://patents.google.com/patent/RU2382416C2/en?oq=RU+2382416+C2
2. Зарубин Ю.Л. (RU), Убоженко H.B. (RU), Стукалов Д.А. (RU), Вовк M.A.(RU), Аистов А.А. (RU), «Способ определения скорости транспортного средства», Изобретение RU 2442218 С1 (приоритет 03 Декабря 2010 опубл. 10.02.2012), Владельцы патента: Общество с ограниченной ответственностью "Технологии Распознавания" (RU) https://patents.google.com/patent/RU2442218C1 /en?oq=RU+2442218+С1
3. Убоженко Н.В. (RU), Аистов А.А. (RU), Зарубин Ю.Л. (RU), Стукалов Д.А. (RU), Вовк М.А. (RU) «Способ определения скорости транспортного средства», патент РФ RU 2419884 С1 (опубл. 27.05.2011), http://www.findpatent.ru/patent/241/2419884.html Владельцы патента RU 2419884:Общество с ограниченной ответственностью "Технологии Распознавания" (RU)
4. Аверкиев М.В., Евдокимов Л.А., Межуев Р.П., Комлик И.Ф., Маркин А.А., Бондарь Д.В., Боднар В.М., Пригоровский В.М., Барский И.В., Полезная модель «Комплекс видеофиксации и измерения скорости движения и координат транспортных средств», приоритет 19 октября 2011 г. RU 113398 U1, опубл. 10.02.2012), https://patents.google.com/patent/RU113398U1/ru
5. Комлик И.Ф. (RU), Симончик К.К. (RU), Бондарь Д.В. (RU), Барский И.В. (RU) «Способ определения положения и скорости движения транспортного средства на дороге и комплекс для его осуществления», Изобретение RU 2559418 С2 (приоритет 15 Октября 2013 г.), ttps://patents.google.com/patent/RU2559418C2/en?oq=RU+2559418C2+
6. Бурлуцкий А.С.(RU), Ильина Ю.В. (RU) Способ определения средней скорости движения транспортного средства на участке автодороги, содержащем криволинейные сегменты // Изобретение RU 2589802, http://www.findpatent.ru/patent/258/2589802.html Владельцы патента RU 2589802: Общество с ограниченной ответственностью "Автодория" (RU)
7. Мустафин Рамиль Гамилович // Способ определения скорости движения транспортного средства // Изобретение RU 2557667 C2, приоритет от 12 Декабря 2013 // http://www.findpatent.ru/patent/255/2557667.html Владельцы патента RU 2557667: Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Казанский государственный энергетический университет" (ФГБОУ ВПО "КГЭУ") (RU)
8. КЛУКАС Алан (GB), СМИТ Брайан Дэвид Винсент (GB), Способ и система измерения скорости транспортного средства // Изобретение RU 2543947 // http://www.findpatent.ru/patent/254/2543947.html Владельцы патента RU 2543947: ЗМ ИННОВЭЙТИВ ПРОПЕРТИЗ КОМПАНИ (US)
9. Убоженко Н.В. (RU), Зарубин Ю.Л. (RU), Вовк М.А. (RU) Способ определения расстояния от видеокамеры измерителя скорости до транспортного средства (варианты) // Изобретение RU 2470376 // http://www.findpatent.ru/patent/247/2470376.html Владельцы патента RU 2470376: Общество с ограниченной ответственностью "Технологии Распознавания" (RU)
10. Мацур И.Ю. (RU), Способ обнаружения, идентификации и определения скорости движения транспортного средства и устройство для его осуществления_// Изобретение 2422909// http://www.findpatent.ru/patent/242/2422909.html. Владельцы патента RU 2422909: Мацур Игорь Юрьевич (RU)
11. Кислицын В.О. (RU), Артемов Н.В. (RU), Калинин В.А. (RU), Шубарев B.A. (RU), Дикарев В.И. (RU), Способ обнаружения, идентификации и определения скорости движения транспортного средства. // Изобретение RU 2571148, http://www.findpatent.ru/patent/257/2571148.html Владельцы патента RU 2571148: Открытое акционерное общество "Авангард" (RU)
12. Новиков В.П. (RU), Карюхин Д.А. (RU), Серга Е.В. (RU), Анисимов В.И. (RU), Щукин В.В. (RU), Шишкин К.Э. (RU), Мамаков П.В. (RU), Способ определения скорости транспортного средства // Изобретение RU 2579645 http://www.findpatent.ru/patent/257/2579645.html, Владельцы патента RU 2579645: Общество с ограниченной ответственностью "Новые технологии" (RU),
13. Петричкович Я.Я. (RU), Хамухин А.В. (RU), Способ и система определения скорости транспортного средства // Изобретение RU 2592712, http://www.findpatent.ru/patent/259/2592712.html Владельцы патента RU 2592712: Акционерное общество "ЭЛВИС-НеоТек" (RU)
14. Агекян Татеос Артемьевич, Основы теории ошибок для астрономов т физиков, М. 1968, 148 стр. , Издательство «Наука», Главная редакция физико-математической литературы.
15. Зайдель Александр Натанович. Ошибки измерений физических величин / А.Н. Зайдель; Физико-техн. ин-т им. А.Ф. Иоффе АН СССР. - Л.: Наука, 1974. - 108 с.
16. Описание измерительного комплекса «Азимут» (Россия) http://tbdd.ru/node/78
17. Описание измерительного комплекса «Кордон М2» (Россия) http://www.simicon.ru/rus/product/gun/cordon_m2.html
18. Описание измерительного комплекса «Кордон Темп» (Россия) http://www.simicon.ru/rus/download/cordon_m/cordon_temp_brochur_2017_gost.pdf
19. Описание измерительного комплекса «MultaRadar CD moving» (Германия) http://www.unikart.su/multaradar-cd-moving.html
20. Описание измерительного комплекса «КРИС» (Россия) http://www.simicon.spb.ru/rus/download/KRIS-C.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГАБАРИТНОЙ ДЛИНЫ ТРАНСПОРТНЫХ СРЕДСТВ, СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2567440C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ФИКСАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И ПРАВИЛ ПАРКОВКИ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2014 |
|
RU2578651C1 |
| Система видеофиксации нарушений правил дорожного движения на перекрестке и способ ее работы | 2017 |
|
RU2668878C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2579645C1 |




Данное изобретение относится к методикам определения превышения допустимой скорости транспортных средств (ТС). Предложенный способ фотофиксации нарушений ПДД заключается в том, что скорость ТС, его перемещение и время, затраченное на перемещение, контролируются по показаниям его собственных датчиков, получаемых от размещенного на ТС транслирующего модуля, а изменение его положения относительно других ТС и элементов дороги определяют по его фотографиям. Для представления результатов фотофиксации осуществляют посредством шести пар фотографий, выполненных в точно известные моменты времени, необходимые для обеспечения достоверности доказательств; образующиеся посредством комбинации четырех реальных фотографий пары фотографий используют для определения скорости ТС в промежуток времени между ними, скорость ТС определяют по величинам перемещений начала и конца элементов кузова, имеющих протяженность вдоль траектории движения, в единицах длины этих элементов на каждой фотографии в паре; определение точной величины перемещения ТС на местности производят после его идентификации, выяснения его габаритных размеров и размеров элементов кузова, выбранных в качестве эталонных; предварительный отбор ТС, подозреваемых в нарушении скоростного режима, выполняют, используя в качестве эталонных элементов кузова, колеса, сводя множество их размеров к трем типоразмерам; на транспортном средстве должен устанавливаться транслирующий модуль, передающий стандартизованный сигнал, содержащий, по крайней мере, VIN транспортного средства (VIN ТС) и показания его датчика скорости, а контролирующие дорожное движение комплексы имеют устройства, принимающие эти сигналы. Заявленный способ позволяет повысить точность определения допустимой скорости ТС. 2 з.п. ф-лы, 6 ил.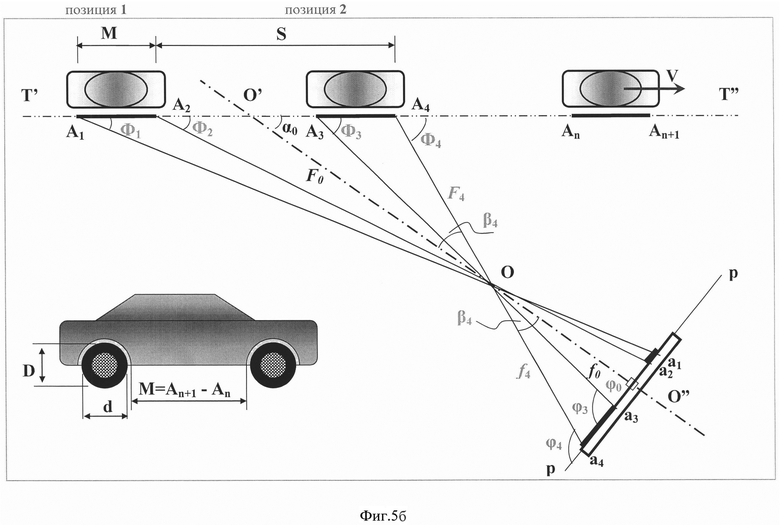
1. Способ фотофиксации нарушений ПДД, заключающийся в том, что скорость транспортного средства (ТС), его перемещение и время, затраченное на перемещение, контролируются по показаниям его собственных датчиков, получаемых от размещенного на ТС транслирующего модуля, а изменение его положения относительно других ТС и элементов дороги определяют по его фотографиям, а идентификацию ТС производят по изображению его государственного регистрационного знака (ГРЗ) и/или по сигналу, получаемому от размещенного на ТС транслирующего модуля, отличающийся тем, что для представления результатов фотофиксации осуществляют посредством шести пар фотографий, выполненных в точно известные моменты времени, необходимые для обеспечения достоверности доказательств; образующиеся посредством комбинации четырех реальных фотографий пары фотографий используют для определения скорости ТС в промежуток времени между ними, скорость ТС определяют по величинам перемещений начала и конца элементов кузова, имеющих протяженность вдоль траектории движения, в единицах длины этих элементов на каждой фотографии в паре; определение точной величины перемещения ТС на местности производят после его идентификации, выяснения его габаритных размеров и размеров элементов кузова, выбранных в качестве эталонных; величина S перемещения автомобиля определяется из каждой парной комбинации четырех фотографий как S = M (sb+se)/(mc+mf) и, более точно, как S = M (sb/ mf))/(d2/d3) = M(se/ mf))/(d1/d4) = M(sb/ mc))/(d4/d1) = M(se/ mc))/(d3/d2) по четырем подобным формулам, где М – реальная длина любого выбранного элемента кузова в направлении перемещения, sb и se – смещение начала и конца элемента кузова, измеренное в произвольных единицах на фотографиях, mc и mf – длины выбранного элемента кузова в ближней и дальней позиции, измеренные в тех же единицах на фотографиях; d1,2,3,4 – расстояния от начала и конца элемента кузова в двух позициях до точки схода траекторий элементов кузова, измеренные в тех же произвольных единицах на фотографиях; достоверность нарушения скоростного режима устанавливают из сравнения 1/10 превышения скорости и среднеквадратичной погрешности, определенной по шести полученным значениям скорости; предварительный отбор ТС, подозреваемых в нарушении скоростного режима, выполняют, используя в качестве эталонных элементов кузова колеса, сводя множество их размеров к трем типоразмерам; на транспортном средстве должен устанавливаться транслирующий модуль, передающий стандартизованный сигнал, содержащий, по крайней мере, VIN транспортного средства (VIN ТС) и показания его датчика скорости, а контролирующие дорожное движение комплексы имеют устройства, принимающие эти сигналы.
2. Способ по п. 1, отличающийся тем, что дополнительно к VIN ТС и показаниям его датчика скорости транслирующий модуль включает в формируемый им сигнал величину пробега и машинное время; информацию о ГРЗ ТС и о лице, им управляющим; для определения перемещения и скорости ТС используют информацию с его датчиков, передаваемую транслирующим модулем ТС.
3. Способ по п. 2, отличающийся тем, что транслирующий модуль ТС выполняется с возможностью приема информации от системы управления дорожным движением и от других ТС.
| А | |||
| КРАСНОВ статья "Челябинский автомобилист и физик объединились, чтобы оспорить самое "трудное" нарушение с камер" на сайте 74.ruurl:"74.ru/text/auto/65999800/" дата выкладки 28.02.2019 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ЗА СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ СКОРОСТНОГО РЕЖИМА ПЕРЕДВИЖЕНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ, ПРАВИЛ ИХ ПАРКОВКИ И ДВИЖЕНИЯ ПО ВЫДЕЛЕННОЙ ПОЛОСЕ ДЛЯ ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2016 |
|
RU2634517C1 |
| RU 2013138481 A, 27.02.2015 | |||
| RU 2015132816 A1, 09.02.2017 | |||
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2011 |
|
RU2480841C1 |
| Токарный резец | 1924 |
|
SU2016A1 |

