Изобретение относится к области ВМФ, а именно к подводным судам-роботам, и может использоваться для противодействия как подводным судам потенциального противника, так и надводным, в частности авианосцам.
Известны подводные суда, в частности роботы, в которых с целью снижения шумности используются движители, идентичные по принципу действия рыбным или китовым (напр. подводный планер - см. статью в «Википедии»). Но в них либо используется конструктивно сложный механический привод рабочего органа (вар. ласт), либо циклическое изменение глубины погружения (планирование), что также создает определенные неудобства, сдерживающие их широкое применение.
Целью изобретения является создание для п/судна практически бесшумного движителя, лишенного этих недостатков.
Указанная цель достигается тем, что в движителе п/судна, включающем в себя ласто- или крылоподобные гидродинамические поверхности, расположенные снаружи корпуса обтекаемой формы, и устройство, обеспечивающее поперечное перемещение этих поверхностей относительно омывающей их воды и расположенное внутри корпуса судна, по изобретению это устройство выполнено в виде электродвигателя, расположенного соосно в корпусе судна и выходной вал которого непосредственно соединен с маховиком, приводимым электродвигателем в циклическое разноскоростное вращение. Гидродинамических поверхностей на корпусе судна более двух, и они расположены равномерно в одной поперечной плоскости. Кроме того, электродвигатель способен работать в режиме электрогенератора, а маховик, вращаемый им, может иметь разнонаправленное вращение.
На фиг. 1 показано устройство п/судна. На фиг. 2 изображено п/судно стоящим на якоре в режиме ожидания. На фиг. 3 показана доставка этих п/судов к месту применения на судне-носителе.
П/судно состоит из корпуса обтекаемой формы 1, снаружи которого звездообразно располагаются ласто- или крылоподобные гидродинамические поверхности 2. Внутри корпуса 1 и соосно с ним установлен электродвигатель 3, с маховиком 4 на его выходном валу. Для питания электродвигателя 3 и другого электрического оборудования судна используется батарея аккумуляторов 5. В головной части судна установлен, с возможностью отделения от него, поплавок 6 с приемником внешних электромагнитных сигналов (далее ПЭМС) и гидропеленгатором внутри (не показаны). С п/судном поплавок 6 соединяется тросом - кабелем 7 с лебедкой 8. В задней части корпуса судна имеется отделяемый от него якорный груз 9, с тросом 10 и лебедкой 11. В задней же части судна установлена балластная емкость 12 с регулируемой степенью заполнения забортной водой. В передней части судна располагается боевой заряд 13 (обычное ВВ). Между ним и поплавковой камерой располагается блок управления судном 14. Для доставки этих судов (20÷50 шт.) к месту применения используется судно-носитель 15 (вар. катамаранного типа).
П/судно, оснащенное предлагаемым движителем, может действовать следующим образом. После прибытия на место применения п/суда поочередно или одновременно покидают судно-носитель 15 и с помощью вышеупомянутых движителей расходятся в разных направлениях (ранее запрограммированных) на расстояние 0÷100 км от судна-носителя 15. При этом движители работают так. Электродвигателем 3 раскручивается маховик 4 до максимальных (для электродвигателя 3) оборотов, и в процессе этого реактивная сила, воспринимаемая статором электродвигателя от ускоряемого маховика, передается на корпус п/судна 1 и приводит его во вращение. Далее электродвигатель 3 переводится в режим холостого хода, до почти полного прекращения вращения корпуса 1 (под воздействием трения корпуса 1 о воду и вследствие работы гидродинамических поверхностей 2). По достижении этого электродвигатель 3 переводится в режим работы электрогенератора, и начинается замедление скорости вращения маховика 4 до полной его остановки. При этом сила, создаваемая затормаживаемым маховиком 4, повторно приводит корпус 1 во вращение, но уже в направлении, противоположном предыдущему. Далее цикл повторяется. При этом маховик 4 повторно может разгоняться как в прежнем направлении, так и в противоположном. Разнонаправленное вращение корпуса 1 передается на гидродинамические поверхности 2, чем и обеспечивается передвижение п/судна. Достигнув заданной точки, п/судно путем заполнения балластной емкости 12 забортной водой, с одновременным сбросом якорного груза 9 на тросе 10, принимает вертикальное положение. Далее, находясь в режиме ожидания, блок управления 14 п/судна периодически принимает команды через спутник связи от главного компьютера, находящегося в командном пункте на судне-носителе 15, с помощью ПЭМС в поплавке 6, поднимаемом на поверхность воды с использованием троса-кабеля 7 и лебедки 8. При этом периодичность всплытия задается главным компьютером на судне-носителе 15. В это же время производится подзарядка аккумуляторных батарей 5 от маломощного изотопного генератора с безмашинным преобразованием тепловой энергии ядерного распада в электрическую (генератор не показан). После получения соответствующей команды поплавок 6 и якорный груз 9 подтягиваются к корпусу 1 и фиксируются в нем. Затем, путем опорожнения балластной емкости 12, п/лодка принимает горизонтальное положение и, совершая колебательные движения вокруг своей продольной оси, (после запуска электродвигателя 3) медленно, в экономичном режиме, начинает плавание в указанном направлении, уже руководствуясь информацией, получаемой от гидропеленгатора в головной части судна. Маневрирование по вертикали осуществляется с помощью балластной емкости 12, а по горизонтали с помощью гидросопел (не показаны) в задней части корпуса 1.
При этом для поражения крупной подводной или надводной цели целесообразно одновременно задействовать большое количество таких п/судов (принцип стаи), движущихся к ней с разных направлений. При выработке ресурса или потере в них необходимости они самоликвидируются, либо затапливаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНОЕ СУДНО | 2016 |
|
RU2623013C1 |
| ДВИЖИТЕЛЬ ЛЕДОКОЛЬНОГО СУДНА - 2 | 2018 |
|
RU2679697C1 |
| БОЕВАЯ МАШИНА-РОБОТ | 2016 |
|
RU2624116C1 |
| ВЕТРОГОННОЕ СУДНО | 2017 |
|
RU2652940C1 |
| ДВИЖИТЕЛЬ ЛЕДОКОЛЬНОГО СУДНА | 2016 |
|
RU2630262C1 |
| СУДНО С МАЛОЙ ПЛОЩАДЬЮ ВАТЕРЛИНИИ | 2015 |
|
RU2601464C1 |
| БУКСИРОВОЧНОЕ СУДНО | 2022 |
|
RU2797060C2 |
| ПЛАВУЧИЙ КРАН | 2022 |
|
RU2791756C2 |
| СУДОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2017 |
|
RU2665783C1 |
| ОДНОЦИЛИНДРОВАЯ СУДОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2017 |
|
RU2653344C1 |



Изобретение относится к области военно-морского флота, а именно к подводным судам-роботам. Движитель подводного судна включает в себя ласто- или крылоподобные гидродинамические элементы, которые расположены снаружи корпуса обтекаемой формы, и устройство, обеспечивающее поперечное перемещение этих элементов относительно омывающей их воды и расположенное внутри корпуса судна. Устройство выполнено в виде электродвигателя, который соосно расположен в корпусе судна и выходного вала. Выходной вал непосредственно соединен с маховиком, приводимым электродвигателем в циклическое разноскоростное вращение. Достигается бесшумное передвижение подводного судна на значительные расстояния. 3 з.п. ф-лы, 3 ил.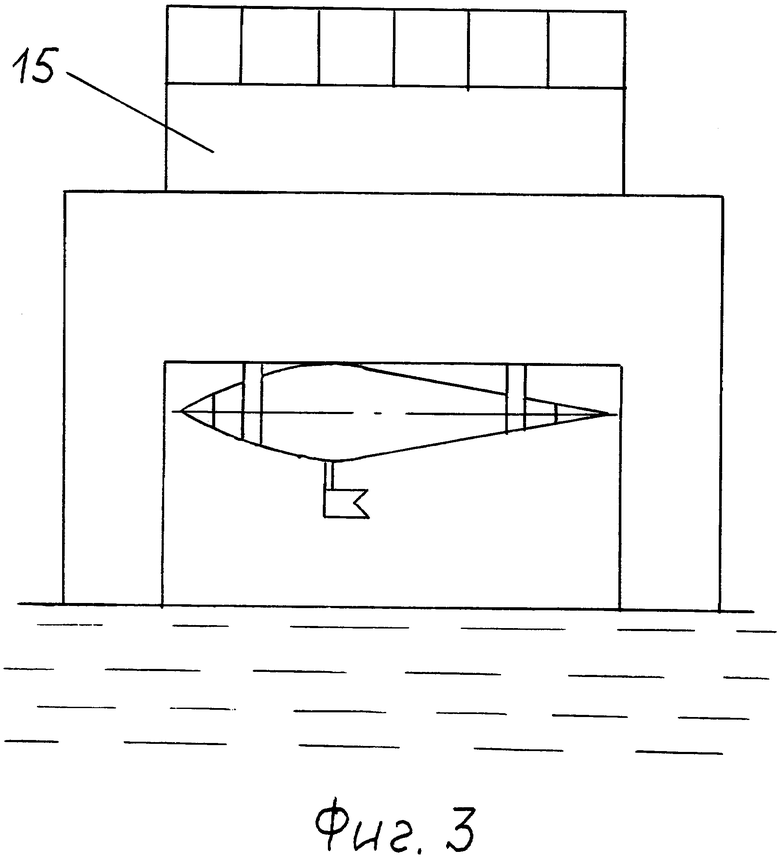
1. Движитель подводного судна, включающий в себя ласто- или крылоподобные гидродинамические элементы, расположенные снаружи корпуса обтекаемой формы, и устройство, обеспечивающее поперечное перемещение этих элементов относительно омывающей их воды и расположенное внутри корпуса судна, отличающийся тем, что это устройство выполнено в виде электродвигателя, соосно расположенного в корпусе судна и выходной вал которого непосредственно соединен с маховиком, приводимым электродвигателем в циклическое разноскоростное вращение.
2. Движитель по п.1, отличающийся тем, что гидродинамических элементов на корпусе судна более двух и они расположены равномерно в одной поперечной плоскости.
3. Движитель по п.1, отличающийся тем, что электродвигатель способен работать в режиме электрогенератора.
4. Движитель по п.1, отличающийся тем, что маховик, вращаемый электродвигателем, имеет разнонаправленное вращение.
| CN 102632980 A, 15.08.2012 | |||
| US 8205570 B1, 26.06.2012 | |||
| US 3157145 A, 17.11.1964 | |||
| Реверсивное реактивное сопло | 1959 |
|
SU124245A3 |

