Область техники
Настоящее изобретение касается устройства для разделения заготовки вдоль линии разделения согласно ограничительной части пункта 1 формулы изобретения
Уровень техники
Известные устройства для разделения заготовки вдоль линии разделения, выполненные как настенные пилы, состоят из направляющей рейки, пильной головки, расположенной на направляющей рейке с возможностью сдвига, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки. Пильная головка включает в себя полотно пилы, которое закреплено на стойке пилы и приводится мотором в движение вокруг оси вращения. Стойка пилы изготовлена с возможностью поворота(наклона) вокруг оси качания под воздействием двигателя поворота. Приводной двигатель и двигатель поворота расположены в корпусе для оборудования пильной головки. Моторизованное устройство подачи включает в себя направляющие салазки и двигатель подачи, который размещается в корпусе для оборудования пильной головки. Пильная головка установлена на направляющих салазках и выполнена с возможностью сдвига вдоль направляющей рейки в направлении подачи посредством двигателя подачи. В корпусе для оборудования, помимо двигателей, предусмотрено контрольное устройство для управления настенной пилой.
Настенные пилы эксплуатируют в процессе ручной работы или по меньшей мере частично автоматизированной работы. При реализации способа ручного разделения заготовки вдоль линии разделения оператор в процессе обработки должен двигаться к конечным точкам разделительной линии, вручную управляя моторизованным подающим устройством. Если полотно пилы окружено защитным кожухом полотна, то точки выхода полотна пилы в заготовке плохо видны оператору или не видны вообще, так что оператор на протяжении процесса обработки не может определить конечные точки линии разделения. Оператор получает лишь незначительный объем информации о текущем результате обработки. Текущую глубину резки полотном пилы в заготовке можно, например, считывать со шкалы на защитном кожухе полотна пилы. Недостаток состоит в том, что при резке без защитного кожуха полотна пилы индикация текущей глубины резки отсутствует. Как и вся пильная головка, защитный кожух полотна пилы во время процесса обработки часто сильно загрязняется, так что возможность считывания со шкалы может быть ограничена. Кроме того, из соображений техники безопасности оператор во время рабочего процесса должен находиться на некотором расстоянии от настенной пилы, в силу чего возможность считывания со шкалы может оказаться дополнительно ограничена, прежде всего в случае горизонтальных разрезов.
Из европейской заявки ЕР 1693173 A1 известен по меньшей мере на отдельных этапах автоматизированный способ разделения заготовки вдоль линии разделения, а также настенная пила, пригодная для реализации способа. Помимо обычных компонентов, у настенной пилы имеется сенсорное устройство с датчиком угла наклона (поворота) и датчиком пути, причем датчик угла наклона контролирует угол наклона стойки пилы, а датчик пути - положение пильной головки на направляющей рейке. Известный способ разделения заготовки содержит последовательность из трех этапов, которые выполняют друг за другом. На первом этапе способа стойку пилы наклоняют на некоторый угол наклона, который соответствует глубине резки для частичного разреза. На втором этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "туда" до первой конечной точки линии разделения. На третьем этапе способа пильную головку продвигают вдоль направляющей рейки вдоль направления подачи "обратно" до второй конечной точки линии разделения. Разделяющий разрез создают в несколько частичных разрезов. Три этапа способа повторяют до тех пор, пока не будет достигнута желаемая глубина резки разделяющего разреза. Автоматизированный способ разделения должен разгрузить оператора от рутинной работы и позволить ему сосредоточиться на наблюдении за процессом обработки. Остается неясным, как оператор наблюдает за процессом обработки (контролирует его).
Сущность изобретения
Задача настоящего изобретения состоит в разработке устройства для разделения заготовки, которое упрощает оператору контроль процесса обработки.
Эту задачу согласно изобретению решают с помощью упомянутого в начале устройства для разделения заготовки посредством признаков пункта 1 формулы изобретения. Предпочтительные усовершенствования представлены в зависимых пунктах формулы изобретения.
Согласно изобретению предусматривается, что контрольное устройство на основании зарегистрированных сенсорным устройством данных измерения рассчитывает текущий результат процесса обработки и представляет текущий результат обработки на индикаторном устройстве. Представление текущего результата обработки на индикаторном устройстве можно осуществлять в виде численного значения и/или в графическом виде. Оператор может контролировать процесс обработки с помощью рассчитанного текущего результата обработки. В случае ручного способа надлежащими величинами для контроля процесса обработки являются в первую очередь текущая глубина резания полотна пилы и положение конечных точек. Всю информацию о результате обработки, которую можно рассчитать на основании результатов измерения (от) сенсорного устройства и других известных параметров оборудования, можно представить на индикаторном устройстве.
Предпочтительно, чтобы контрольное устройство обладало элементом памяти и запоминало в элементе памяти зарегистрированные сенсорным устройством результаты измерения, а также текущий результат обработки. Если величины, измеренные сенсорным устройством, и рассчитанный текущий результат обработки сохранены в элементе памяти, контрольное устройство может рассчитать другие ключевые величины для наблюдения за процессом обработки или графически представить временное развитие процесса обработки.
Особо предпочтительно, чтобы контрольное устройство на основании сохраненных в элементе памяти данных измерения и текущих результатов обработки рассчитывало другие ключевые величины для процесса обработки и представляло другие ключевые величины на индикаторном устройстве. Представление других ключевых величин для процесса обработки на индикаторном устройстве можно осуществлять в виде численного значения и/или в графическом виде. Помимо глубины резания полотна пилы в заготовке в настоящий момент (глубины погружения) интерес для оператора представляет, например, прохождение разделяющего разреза в заготовке. К другим ключевым величинам для процесса обработки относятся основные значения глубины резки, положения конечных точек разделяющего разреза и длина разделяющего разреза.
В предпочтительном варианте исполнения предусмотрено устройство дистанционного управления, которое включает в себя пульт управления и индикаторное устройство и соединено с контрольным устройством коммуникационным соединением. Представление текущего результата обработки на устройстве дистанционного управления обладает тем преимуществом, что оператор может контролировать процесс обработки с помощью рассчитанных текущих результатов обработки и прочих ключевых величин. Во время обработки оператор держит устройство дистанционного управления во время обработки в руках и через индикаторное устройство получает всю информацию для контроля процесса обработки.
Особо предпочтительно, чтобы контрольное устройство включало в себя первое и второе контрольное устройство, причем первое устройство располагалось бы в пильной головке, а второе контрольное устройство в устройстве дистанционного управления. С помощью пульта управления устройства дистанционного управления оператор задает желаемые параметры устройств и обработки. Второе контрольное устройство преобразует параметры устройств и обработки в соответствующие управляющие команды для пильной головки и моторизованного устройства подачи. Управляющие команды по коммуникационному соединению передаются со второго контрольного устройства на первое контрольное устройство. Первое контрольное устройство выдает управляющие команды на пильную головку и моторизованное устройство подачи.
В предпочтительном варианте расчет текущего результата обработки осуществляют в первом контрольном устройстве, которое расположено в пильной головке. Расчет и индикация текущего результата обработки должны происходить в реальном времени, так чтобы оператор мог контролировать процесс обработки, основываясь на текущем результате обработки, и при необходимости вмешаться в процесс обработки. Чем короче пути передачи данных измерения, тем меньше временная задержка. Расчет текущего результата обработки в первом контрольном устройстве обладает тем преимуществом, что по коммуникационному соединению на устройство дистанционного управления передают только результаты обработки, которые должны быть представлены на индикаторном устройстве.
В альтернативном предпочтительном варианте первое контрольное устройство передает зарегистрированные сенсорным устройством данные измерения на второе контрольное устройство, а расчет текущего результата обработки осуществляется во втором контрольном устройстве. Передача результатов измерения через коммуникационное соединение на второе контрольное устройство, которое расположено в устройстве дистанционного управления, целесообразна тогда, когда применение требует специального устройства дистанционного управления и может быть реализовано не со всяким устройством дистанционного управления.
Примеры исполнения
Ниже дано пояснение примеров исполнения изобретения на основании чертежа. Чертеж не обязательно отображает примеры исполнения строго масштабно, напротив, чертеж (там, где он служит пояснению) выполнен в схематическом и/или несколько искаженном виде. Что касается дополнений к положениям, непосредственно видимым из чертежа, то дана ссылка на соответствующий уровень техники. При этом следует учитывать, что возможны разнообразные модификации и изменения, касающиеся формы и подробностей формы исполнения, без отклонения от общей идеи изобретения. Признаки изобретения, изложенные в описании, в чертеже, а также в формуле изобретения, могут быть существенны для варианта исполнения изобретения как каждый по отдельности, так и в произвольном сочетании. Кроме того, изобретение охватывает все сочетания по меньшей мере двух признаков, изложенных в описании, чертеже и/или в формуле изобретения. Общая идея изобретения не ограничена точной формой или подробностями показанной и описанной ниже предпочтительной формы исполнения и не лимитирована объектом, который был бы более ограничен, чем заявленный в формуле изобретения объект. В случае указанных диапазонов параметров значения, лежащие в пределах названных границ, также следует считать изложением граничных значений, необходимо их произвольное применение и испрашивание. В целях простоты изложения ниже для идентичных или сходных деталей или же для деталей с идентичной или сходной функцией применяют одинаковые обозначения.
Представлены:
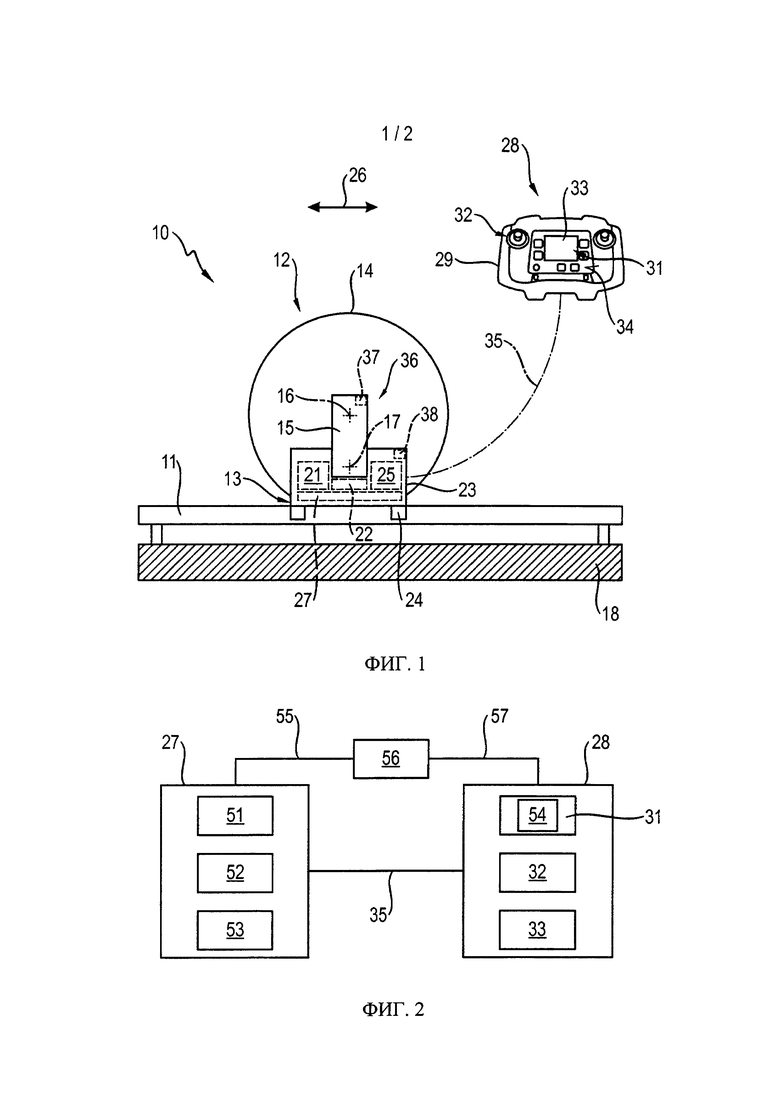
ФИГ. 1 - система устройств для разделения заготовки на основании направляющих, состоящая из направляющей рейки, пильной головки, расположенной на направляющей рейке с возможностью сдвига, и моторизованного механизма подачи для перемещения пильной головки вдоль направляющей рейки;
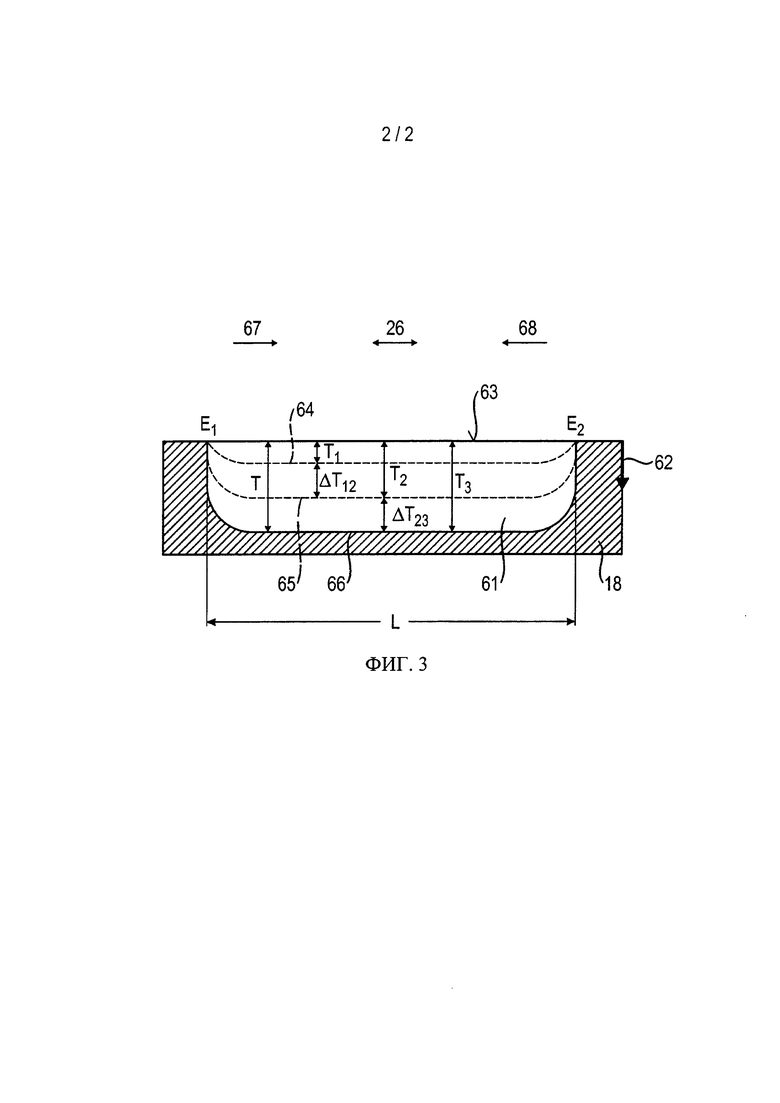
ФИГ. 2 - взаимодействие между расположенным в пильной головке первым контрольным устройством и устройством дистанционного управления системы устройств, показанной на ФИГ. 1, в форме блок-диаграммы; и
ФИГ. 3 - заготовка, в которой с помощью системы устройств ФИГ. 1 в три поэтапных разреза создают разделяющий разрез.
ФИГ. 1 демонстрирует схематическое изображение системы устройств 10 на основании направляющих, состоящей из направляющей рейки 11, расположенного на направляющей рейке 11 с возможностью сдвига рабочего инструмента 12 и моторизованного механизма подачи 13 для перемещения рабочего инструмента 12 вдоль направляющей рейки 11.
Рабочий инструмент выполнен в виде пильной головки 12 и включает в себя полотно пилы 14, которое закреплено на стойке пилы 15 и приводится в движение вокруг оси вращения 16. Стойка пилы 15 изготовлена с возможностью поворота вокруг оси качания. Движение наклона стойки пилы 15 вокруг оси качания 17 изменяет глубину резки полотном пилы 14. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в подлежащую обработке заготовку 18. В качестве альтернативы движению наклона стойки пилы 15 вокруг оси качания 17 можно перемещать стойку пилы 15, например, с помощью линейного привода или другого приводного устройства. Для защиты оператора полотно пилы 14 может быть окружено защитным кожухом, который закрепляют на раме пилы 15 с помощью держателя кожуха полотна 9.
Вращение полотна пилы 14 вокруг оси вращения 16 осуществляют с помощью приводного двигателя 21, а движение наклона стойки пилы 15 вокруг оси качания 17 осуществляют с помощью двигателя поворота 22. Приводной двигатель 21 и двигатель поворота 22 расположены в корпусе 23 для оборудования пильной головки 12. Моторизованное устройство подачи 13 включает в себя направляющие салазки 24 и мотор подачи 25, который размещается в корпусе для оборудования 23. Пильная головка 12 закреплена на направляющих салазках 24 и выполнена с возможностью сдвига вдоль направляющей рейки 11 в направлении подачи 26 посредством мотора подачи 25. В корпусе для оборудования 23, помимо двигателей 21, 22, 25, размещено контрольное устройство 27 для управления пильной головкой 12 и моторизованным устройством подачи 13.
Управление системой устройств 10 осуществляют посредством управляющего устройства 28, которое в представленном варианте исполнения ФИГ. 1 выполнено как устройство дистанционного управления. Устройство дистанционного управления 28 включает в себя корпус устройства 29, расположенное в корпусе устройства 29 второе контрольное устройство 31, а также пульт управления 32 и индикаторное устройство 33, которые расположены на верхней стороне 34 корпуса устройства 29. Второе контрольное устройство 31 через коммуникационное соединение 35 соединено с первым контрольным устройством 27.
Коммуникационное соединение 35 выполнено как кабельное соединение или как беспроводное коммуникационное соединение, например, в форме инфракрасного соединения, соединения Bluetooth, WLAN или Wi-Fi. Помимо указанных технологий беспроводного соединения для передачи данных годятся все уже известные и перспективные технологии беспроводного соединения.
Для наблюдения за системой устройств 10 и за процессом обработки у системы устройств 10 имеется сенсорное устройство 36 с несколькими сенсорными элементами (датчиками). Первый сенсорный элемент 37 выполнен как датчик угла наклона, а второй сенсорный элемент 38 - как датчик перемещения. Датчик угла наклона 37 измеряет текущий угол наклона α стойки пилы 15. Угол наклона стойки пилы 15 с диаметром полотна пилы 14 определяет, насколько глубоко полотно пилы 14 погружается в заготовку 18. Датчик перемещения 38 замеряет текущее положение X пильной головки 12 на направляющей рейке 11. Измеряемые величины α, X с датчика угла наклона 37 и с датчика перемещения 38 передаются на первое контрольное устройство 27.
ФИГ. 2 демонстрирует взаимодействие между первым контрольным устройством 27 системы устройств 10 и устройством дистанционного управления 28 в форме блок-диаграммы.
Первое контрольное устройство 27 служит для управления пильной головкой 12, моторизованным устройством подачи 13 и сенсорным устройством 36. Первое контрольное устройство 27 включает в себя управляющий элемент 51 и элемент обработки данных 52. С помощью управляющего элемента 51 осуществляют управление пильной головкой 12, моторизованным устройством подачи 13 и сенсорным устройством 36. Элемент обработки данных 52 служит для того, чтобы анализировать измеряемые величины, которые во время процесса обработки регистрируются сенсорным устройством 36. Помимо управляющего элемента 51 и элемента обработки данных 52 у первого контрольного устройства 27 имеется элемент памяти 53, в котором возможно запоминание данных измерения, зарегистрированных сенсорным устройством 36.
С помощью пульта управления 32 устройства дистанционного управления 28 оператор задает желательные параметры устройств и обработки. Второе контрольное устройство 31 преобразует параметры устройств и обработки в соответствующие управляющие команды для пильной головки 12 и моторизованного устройства подачи 13. При этом понятие "управляющая команда" охватывает все команды контрольного устройства для управления компонентами оборудования. Управляющие команды по коммуникационному соединению 35 передаются со второго контрольного устройства 31 на первое контрольное устройство 27. Управляющий элемент 51 первого контрольного устройства 27 выдает управляющие команды на пильную головку 12 и моторизованное устройство подачи 13.
Во время обработки сенсорное устройство 36 ведет наблюдение за пильной головкой 12, моторизованным устройством подачи 13 и процессом обработки. Сенсорные элементы 37, 38 сенсорного устройства 36 регистрируют различные измеряемые величины, причем регистрация величин может происходить непрерывно (аналоговым способом) или с некоторой частотой сканирования (цифровым способом). В примере исполнения ФИГ. 1 датчик угла наклона 37 регистрирует угол наклона α стойки пилы 15, а датчик перемещения 38 - положение X пильной головки 12. Зарегистрированные результаты измерения передают с сенсорных элементов 37, 38 на элемент обработки данных 52 первого контрольного устройства 27. На основании зарегистрированных показателей измерения α, X и прочих параметров оборудования, как то диаметра полотна пилы 14, элемент обработки данных рассчитывает текущий результат процесса обработки. Глубину погружения полотна пилы 14 в заготовку можно рассчитать, например, из угла наклона α стойки пилы 15 и диаметра полотна пилы 14.
Рассчитанный текущий результат обработки передается по коммуникационному соединению 35 на второе контрольное устройство 31 и отображается на индикаторном устройстве 33 устройства дистанционного управления 28. Представление текущего результата обработки можно осуществлять в виде численного значения и/или в графическом виде. Оператор может контролировать процесс обработки с помощью текущих результатов обработки. В случае ручного способа надлежащими величинами для контроля процесса обработки являются в первую очередь текущая глубина погружения полотна пилы 14 в заготовку 18, которая соответствует текущей глубине резания, и положение конечных точек. Всю информацию о результате обработки, которую можно рассчитать исходя из данных измерения сенсорного устройства 36, можно отобразить на индикаторном устройстве 33 устройства дистанционного управления 28.
Зарегистрированные результаты измерения α, X и рассчитанные исходя из них текущие результаты обработки можно сохранять в элементе памяти 53 первого контрольного устройства 27. В качестве альтернативы результаты измерения α, X и текущие результаты обработки сохраняют в элементе памяти 54 второго контрольного устройства 31. На основании текущих результатов обработки второе контрольное устройство 31 может рассчитать другие ключевые величины для контроля процесса обработки или представить временное развитие процесса обработки в графическом виде. Помимо глубины погружения полотна пилы 14 в заготовку 18 в настоящий момент интерес для оператор представляет, например, прохождение разделяющего разреза в заготовке 18.
В варианте исполнения ФИГ. 2 расчет текущего результата обработки осуществляют в элементе обработки данных 52 первого контрольного устройства 27. В качестве альтернативы измеренные величины α, X сенсорного устройства 36 можно передавать по коммуникационному соединению 35 на второе контрольное устройство 31, и расчет текущего результата обработки осуществляют во втором контрольном устройстве. Измеренные величины α, X и рассчитанные исходя из них текущие результаты обработки сохраняют в элементе памяти 54 второго контрольного устройства 31.
Первое контрольное устройство 27 может посредством еще одного коммуникационного соединения 55 соединяться еще с одним индикаторным устройством 56. В этом варианте целесообразно осуществлять расчет текущего результата обработки в первом контрольном устройстве 27, а затем передавать рассчитанный результат обработки с первого контрольного устройства 27 на соединенные индикаторные устройства 33, 56. Временная задержка между расчетом и индикацией на индикаторных устройствах 33,56 уменьшается. Если расчет текущего результата обработки осуществляют во втором контрольном устройстве 31, то другое индикаторное устройство 56 должно соединяться с устройством дистанционного управления 28 через еще одно коммуникационное соединение 57.
На ФИГ. 3 показана заготовка 18, в которой с помощью системы устройств 10 с ФИГ. 1 создают разделяющий разрез 61. В направлении глубины 62 разделяющий разрез 61 характеризуется глубиной резки Т, а в направлении подачи 26 он проходит вдоль разделительной линии 63 между первой конечной точкой E1 и второй конечной точкой E2. Разделяющий разрез 61 создают в три частичных разреза 64, 65, 66. Первый частичный разрез 64 называют направляющим разрезом, второй частичный разрез 65 - первым главным разрезом, а третий частичный разрез 66 - вторым главным разрезом.
Первый частичный разрез 64 характеризуется первой глубиной резки T1, которая соответствует первому углу наклона α1 стойки пилы 15, и его создают в первом направлении "туда" 67 между первой и второй конечными точками E1, E2. Второй частичный разрез 65 характеризуется второй глубиной резки T2, которая соответствует второму углу наклона α2 стойки пилы 15, и его создают в первом направлении "обратно" 68 между второй и первой конечными точками E2, E1, причем обратное направление 68 проходит противоположно прямому направлению (направлению "туда") 67. Третий частичный разрез 66 характеризуется третьей глубиной резки T3, которая соответствует третьему углу наклона α3 стойки пилы 15, и его создают в направлении "туда" 67 между первой и второй конечными точками E1, E1. После третьего частичного разреза 65 разделяющий разрез 61 в заготовке 18 завершен.
Значения глубины резки T1, T2, T3 частичных разрезов 64, 65, 66 можно рассчитать исходя из углов наклона α1, α2, α3 стойки пилы 15, которые регистрирует датчик угла наклона 37, и диаметра полотна пилы 14. На основании значений глубины резки T1, T2, T3 можно путем формирования разности определить глубину основных разрезов; глубина первого основного разреза ΔT12 получается как разность первой и второй глубин резки T2-T1, а глубину второго основного разреза ΔT23 получают как разность второй и третьей глубин резки T3-T2. Положения конечных точек E1, E2 можно рассчитать исходя из положений пильной головки 12, которые регистрирует датчик перемещения 38, диаметра полотна пилы 14 и угла наклона α стойки пилы. Длину L разделяющего разреза 61 получают из расстояния между первой конечной точкой E1 и второй конечной точкой E2.
Всю представленную на ФИГ. 3 информацию о разделяющем разрезе 61 или частичных разрезах 64, 65, 66, которую рассчитывают на основании данных измерения сенсорного устройства 36, можно представить на индикаторном устройстве 33 устройства дистанционного управления 28. Представление результатов измерения сенсорного устройства 36, текущих результатов обработки и прочих ключевых величин можно осуществлять в виде численного значения и/или в графическом виде. К числу текущих результатов обработки, которые рассчитывают на основании данных измерения сенсорного устройства 36, относятся прежде всего значения глубины резки T1, T2, T3 полотна пилы 14. К прочим ключевым значениям относятся глубины основных разрезов ΔT12, ΔT23, положения конечных точек E1, E2 разделяющего разреза 61 и длина L разделяющего разреза 61.
Изобретение относится к устройствам для разделения заготовок вдоль линии разделения. Устройство содержит пильную головку с приводным двигателем и полотном пилы, закрепленным на выполненной с возможностью поворота вокруг оси качания стойке пилы и выполненным с возможностью вращения вокруг оси вращения, устройство подачи с направляющими салазками и мотором подачи, при этом пильная головка размещена на направляющих салазках и выполнена с возможностью перемещения вдоль направляющей рейки, сенсорное устройство с датчиками угла наклона стойки пилы и перемещения пильной головки, контрольное устройство, пульт управления и индикаторное устройство. Изобретение направлено на создание устройства для разделения, которое упрощает оператору контроль процесса обработки. 6 з.п. ф-лы, 3 ил.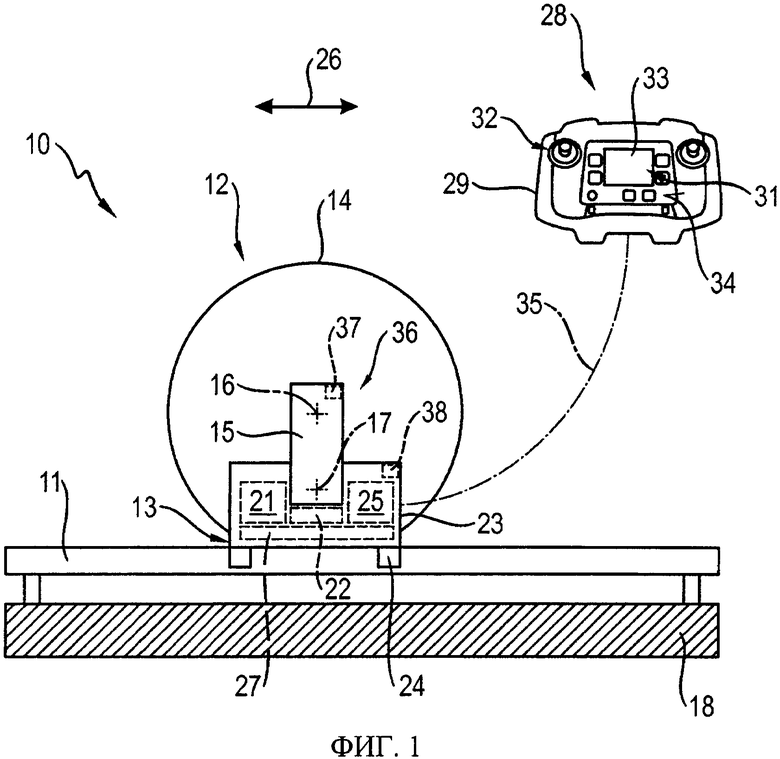
1. Устройство (10) для разделения заготовки (18) вдоль линии разделения (63) между первой и второй конечной точками (Ε1, Е2), содержащее
- пильную головку (12) с приводным двигателем (21) и полотном пилы (14), закрепленным на выполненной с возможностью поворота вокруг оси качания (17) стойке пилы (15) и выполненным с возможностью вращения посредством приводного двигателя (21) вокруг оси вращения (16),
- устройство подачи (13) с направляющими салазками (24) и мотором подачи (25), причем пильная головка (12) размещена на направляющих салазках (24) и выполнена с возможностью перемещения вдоль направляющей рейки (11) в направлении подачи (26) посредством мотора подачи (25),
- сенсорное устройство (36) по меньшей мере с одним сенсорным элементом (37, 38) для наблюдения за пильной головкой (12), устройством подачи (13) и/или процессом обработки, причем сенсорное устройство (36) содержит первый сенсорный элемент (37), выполненный в виде датчика угла наклона для измерения угла наклона (α) стойки пилы (15), и второй сенсорный элемент (38), выполненный в виде датчика перемещения для измерения положения (X) пильной головки (12) на направляющей рейке (11),
- контрольное устройство (27, 31) с управляющим элементом (51) для управления пильной головкой (12), устройством подачи (13) и сенсорным устройством (36), а также элементом обработки данных (52) для анализа зарегистрированных сенсорным устройством измеряемых величин (α, X), причем упомянутые измеряемые величины (α, X) включают угол наклона (α) стойки пилы (15) и положение (X) пильной головки (12),
- пульт управления (32) для обслуживания пильной головки (12) и устройства подачи (13) и
- индикаторное устройство (33),
отличающееся тем, что контрольное устройство (27, 31) выполнено с возможностью расчета на основании зарегистрированных сенсорным устройством (36) измеряемых величин (α, X) текущего результата (T1, T2, T3) процесса обработки и его представления на индикаторном устройстве (33).
2. Устройство по п. 1, отличающееся тем, что контрольное устройство (27, 31) имеет элемент памяти (53, 54) и выполнено с возможностью сохранения зарегистрированных сенсорным устройством (36) измеряемых величин (α, X) и текущего результата обработки (T1, T2, T3) в элементе памяти (53, 54).
3. Устройство по п. 2, отличающееся тем, что контрольное устройство (27, 31) выполнено с возможностью расчета на основании сохраненных в элементе памяти (53, 54) измеряемых величин (α, X) и текущих результатов обработки (T1, T2, T3) дополнительных ключевых величин (ΔT12, ΔT23, Ε1, Ε2, L) для процесса обработки и их представления на индикаторном устройстве (33).
4. Устройство по одному из пп.1-3, отличающееся тем, что содержит устройство дистанционного управления (28) с пультом управления (32) и индикаторным устройством (33), которое посредством коммуникационного соединения (35) соединено с контрольным устройством (27, 31).
5. Устройство по п. 4, отличающееся тем, что контрольное устройство (27, 31) содержит первое (27) и второе (31) контрольные устройства (27), причем первое контрольное устройство (27) расположено в пильной головке (12), а второе контрольное устройство (31) - в устройстве дистанционного управления (28).
6. Устройство по п. 5, отличающееся тем, что первое контрольное устройство (27) выполнено с возможностью расчета текущего результата обработки (T1, T2, T3).
7. Устройство по п. 5, отличающееся тем, что первое контрольное устройство (27) выполнено с возможностью передачи зарегистрированных сенсорным устройством (36) измеряемых величин (α, X) на второе контрольное устройство (31), а второе контрольное устройство (31) выполнено с возможностью расчета текущего результата обработки (T1, T2, T3).
| Плавучее швартовное устройство Баранова В.М. | 1989 |
|
SU1693173A1 |
| Ленточная пила | 1973 |
|
SU543334A3 |
| ЛЕНТОЧНАЯ ПИЛА | 1999 |
|
RU2163538C1 |
| ПРОДОЛЬНО-РАСПИЛОВОЧНЫЙ КРУГЛОПИЛЬНЫЙ СТАНОК | 1992 |
|
RU2050259C1 |

