Изобретение относится к электротехнике, а именно электроприводам переменного тока периодического движения, и может быть использовано при создании вибрационных электроприводов для перемешивания сыпучих, пастообразных и жидких веществ, в автоматизированных электроприводах механизмов с колебательным движением рабочего органа, вибрационных установках в горной промышленности, строительстве, машиностроении или сельском хозяйстве.
Известен электропривод колебательного движения [RU 2401503 C1, МПК Н02Р 25/02 (2006.01), опубл. 10.10.2010], содержащий источник питания, установленный на опору статор трехфазного электродвигателя, укомплектованный ротором с одной парой явно выраженных полюсов, упругий элемент, жестко связанный с опорой с одной стороны и ротором электродвигателя с другой стороны, фиксирующий ротор со статором в начальном положении, при котором продольная ось симметрии ротора совпадает с продольной осью симметрии электромагнитного поля. Одна фазная статорная обмотка электродвигателя, задающая начальное положение ротора и упругого элемента, последовательно включена началом обмотки с положительным полюсом источника питания, снабженного трехфазным мостовым выпрямителем, а концом подключена к соединенным началами двум другим фазным статорным обмоткам, концы каждой из которых через последовательно включенные диоды подключены к анодам тиристоров, соединенные катоды которых подключены к отрицательному полюсу источника питания и общему выходу генератора импульсов. Управляющие электроды тиристоров подключены к сигнальным выходам генератора импульсов, а аноды тиристоров соединены конденсатором.
Недостатками этого вентильного электропривода являются невозможность получения энергетически выгодного резонансного режима работы электропривода во всем диапазоне регулирования частоты колебаний из-за фиксированного значения упругого элемента (торсиона) и дополнительные динамические потери, связанные с наличием в электромагнитном моменте двигателя пульсаций, вызванных дискретным переключением управляющих тиристоров.
Известен электропривод колебательного движения [RU 107426 U1, МПК Н02Р 6/02 (2006.01), Н02Р 27/04 (2006.01), Н02K 33/04 (2006.01), опубл. 10.08.2011], содержащий двухфазный электродвигатель, обмотка возбуждения которого имеет зажимы для подключения к источнику переменного тока, преобразователь частоты, входы которого предназначены для подключения к фазам источника переменного тока соответственно, инвертор, выход которого соединен с выводами обмотки управления электродвигателя, функциональный цифроаналоговый преобразователь, усилитель с регулируемым коэффициентом усиления, преобразователь разности частот в код, выход которого соединен с входом функционального цифроаналогового преобразователя, а первый вход связан с выходом преобразователя частоты. Фазосдвигающее звено подключено своим входом к фазам источника переменного тока, а выходом ко второму входу преобразователя разности частоты в код и к первому входу модулятора, второй вход которого подключен к выходу усилителя с регулируемым коэффициентом усиления, первый вход которого подключен к выходу датчика положения, механически соединенного с валом электродвигателя. Второй вход усилителя с регулируемым коэффициентом усиления подключен к выходу второго сумматора, первый вход которого подключен к выходу функционального цифроаналогового преобразователя. Второй вход второго сумматора подключен к задатчику позиционного усилия. Первый сумматор соединен своим выходом с входом инвертора, первым входом подключен к выходу преобразователя частоты, а вторым входом подключен к выходу модулятора. Упругий элемент соединен механически через датчик положения с валом электродвигателя. Этот электропривод выбран в качестве прототипа.
Однако, сам исполнительный двигатель (двухфазный электродвигатель) имеет при колебательном движении низкий кпд и работает при токах, значения которых соответствуют пусковым токам, что вызывает существенное нагревание обмоток двухфазного электродвигателя и, как следствие, к большим тепловым потерям и снижению общего кпд электропривода колебательного движения.
Задачей изобретения является улучшение энергетических показателей электропривода колебательного движения и обеспечение резонансного режима работы в широком частотном диапазоне регулирования частоты.
Поставленная задача решена за счет того, что вентильный электропривод колебательного движения, так же как в прототипе, содержит датчик положения, механически соединенный с валом двухфазного электродвигателя, усилитель с регулируемым коэффициентом усиления, источник переменного тока и сумматор, соединенный своим выходом с входом инвертора напряжения, выход которого подключен ко второй статорной обмотки двигателя.
Согласно изобретению в вентильный электропривод введены вентильный двигатель, выпрямитель, фильтр низкой частоты, задающий генератор и релейный элемент. Первая статорная обмотка вентильного двигателя подключена к выходу фильтра низкой частоты, который соединен своим входом с выходом выпрямителя, вход которого подключен к источнику переменного тока. Выход датчика положения соединен с входом релейного элемента, выход которого подключен к выходу усилителя с регулируемым коэффициентом усиления. Выход задающего генератора частоты колебаний соединен с первым входом сумматора, второй вход которого подключен к выходу усилителя с регулируемым коэффициентом усиления.
Использование вентильного двигателя, выпрямителя, фильтра низкой частоты, задающего генератора и релейного элемента позволяет создать колебательный режим работы вентильного электропривода с регулируемыми выходными параметрами и поддерживать резонансный режим работы за счет регулирования собственной частоты, обеспечивая высокие энергетические показатели электропривода в целом.
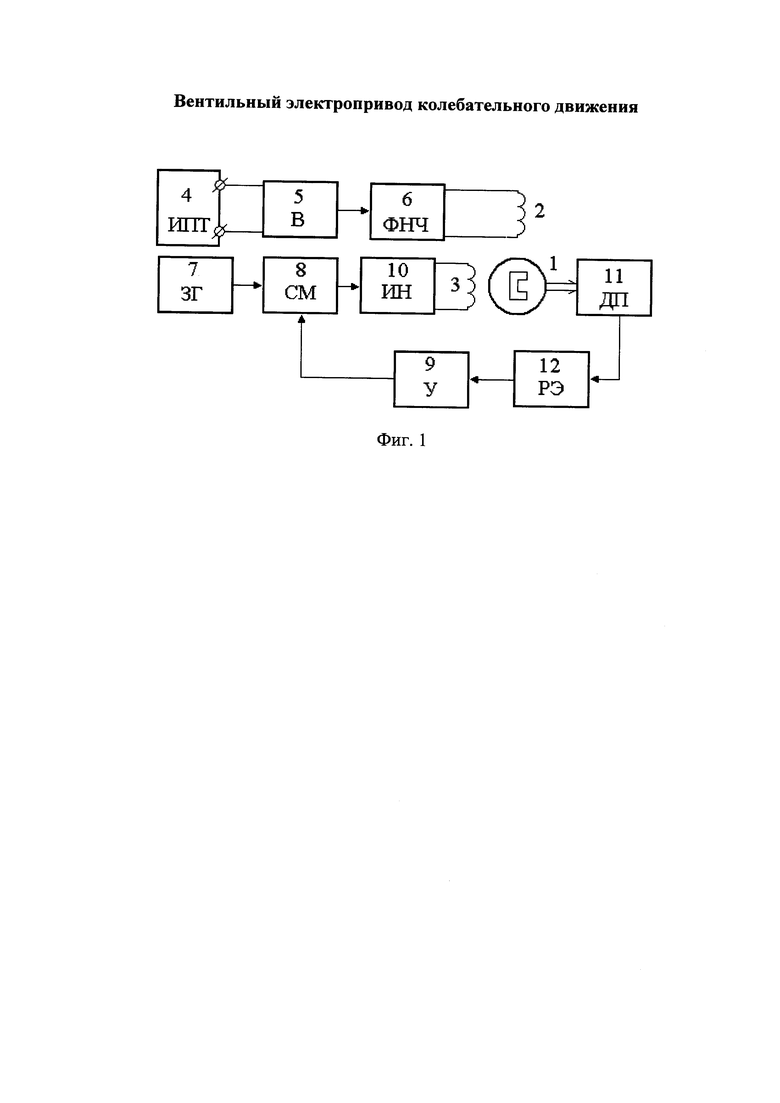
На фиг. 1 представлена блок-схема вентильного электропривода колебательного движения.
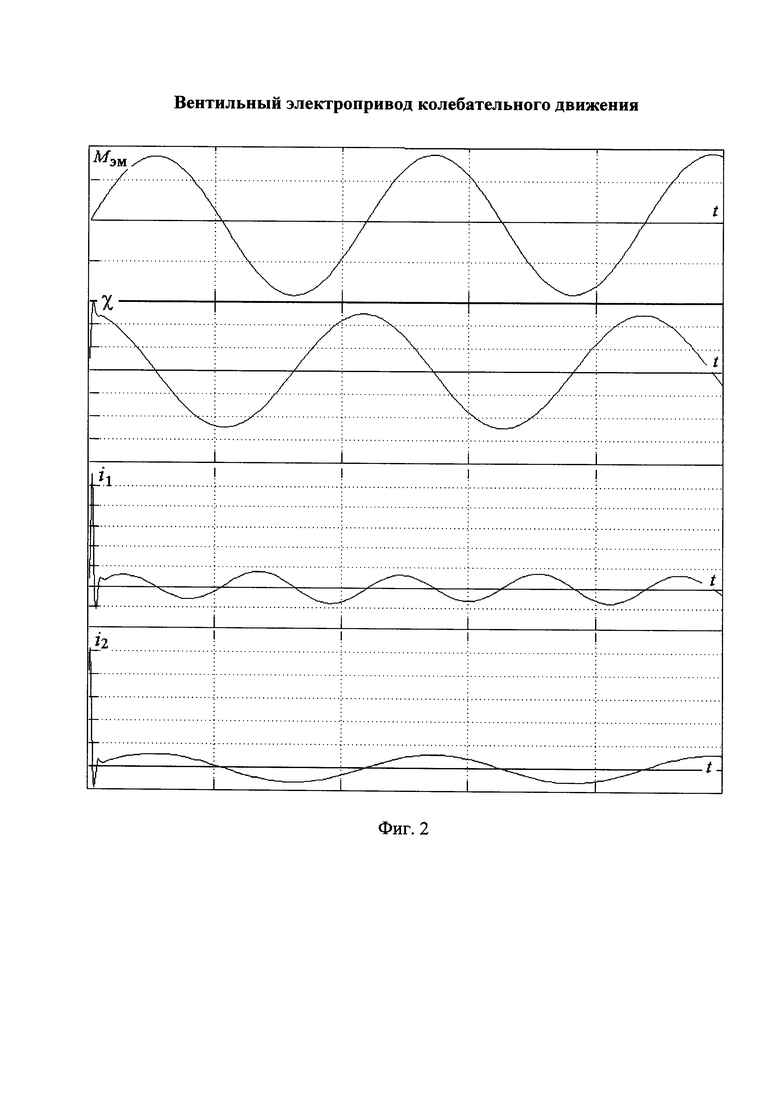
На фиг. 2 представлены временные диаграммы изменения координаты подвижного элемента вентильного двигателя χ(t) электромагнитного момента Мэм(t) и токов i1(t), i2(t) при запуске на частоту колебаний Ω предложенного вентильного электропривода.
Вентильный электропривод колебательного движения (фиг. 1) состоит из вентильного двигателя 1 со статорными обмотками 2 и 3, источника переменного тока 4 (ИПТ) частоты ω, выпрямителя 5 (В), фильтра низкой частоты 6 (ФНЧ), задающего генератора частоты колебаний 7 (ЗГ), сумматора 8 (СМ), усилителя с регулируемым коэффициентом усиления 9 (У), инвертора напряжения 10 (ИН), датчика положения 11 (ДП) и релейного элемента 12 (РЭ).
Статорная обмотка 2 вентильного двигателя 1 подключена к выходу фильтра низкой частоты 6 (ФНЧ), а статорная обмотка 3 - к выходу инвертора напряжения 10 (ИН), вход которого соединен с выходом сумматора 8 (СМ). Первый вход сумматора 8 (СМ) соединен с выходом задающего генератора частоты колебаний 7 (ЗГ), а второй - с выходом усилителя с регулируемым коэффициентом усиления 9 (У), вход которого подключен к выходу релейного элемента 12 (РЭ), вход которого связан с выходом датчика положения 11 (ДП). Датчик положения 11 (ДП) механически соединен с выходным валом вентильного двигателя 1. Вход фильтра низкой частоты 6 (ФНЧ) подключен к выходу выпрямителя 5 (В), вход которого соединен с источником переменного тока 4 (ИПТ).
При технической реализации макетного образца заявляемого устройства задающий генератор частоты колебаний 7 (ЗГ) и сумматор 8 (СМ) реализованы на операционных усилителях серии 140 УД8. Выпрямитель 5 (В) выполнен по двухполупериодной схеме выпрямления на полупроводниковых диодах. Фильтр низкой частоты 6 (ФНЧ) выполнен по схеме Г-образного LC фильтра. В качестве инвертора напряжения 10 (ИН) использовался мостовой инвертор с транзисторными ключами. Релейный элемент 12 (РЭ) выполнен по схеме компаратора на операционном усилителе К140УД6. Усилитель с регулируемым коэффициентом усиления 9 (У) реализован на дифференциальном усилителе с токопитающим каскадом на базе микросхемы К1УТ981.
Вентильный электропривод колебательного движения работает следующим образом. Напряжение с выхода источника переменного тока 4 (ИПТ) частоты ω
U4=Um1sin(ω⋅t),
где Um1 - амплитуда напряжения источника переменного тока частоты ω;
t - текущее значение времени,
поступает на вход двухполупериодного выпрямителя 5 (В), где оно сначала выпрямляется
 ,
,
а затем после сглаживания пульсаций на фильтре низкой частоты 6 (ФНЧ)
U6=k6U5,
где k6 - коэффициент передачи фильтра,
запитывает статорную обмотку 2 двухфазного вентильного двигателя 1.
Одновременно напряжение с выхода задающего генератора частоты колебаний 7 (ЗГ)
U7=Um2sin(Ω⋅t),
где Um2 - амплитуда напряжения источника переменного тока:
Ω - частота выходного напряжения задающего генератора,
поступает на первый вход сумматора 8 (СМ).
Датчик положения 11 (ДП) вырабатывает сигнал, пропорциональный закону движения подвижного элемента вентильного двигателя 1
χ=χmsin(Ω⋅t+α),
где χm - амплитуда колебаний подвижного элемента вентильного двигателя; α - начальная фаза колебаний,
который поступает на релейный элемент 12 (РЭ). В результате, на выходе релейного элемента 12 (РЭ) формируется напряжение
U12=k12sign(χ),
где k12 - коэффициент передачи релейного элемента 12 (РЭ).
Напряжение с выхода релейного элемента 12 (РЭ) подается на вход усилителя с регулируемым коэффициентом усиления 9 (У), сформированное на выходе которого напряжение
U9=k9sign(χ),
где k9 - коэффициент передачи усилителя с учетом коэффициента передачи релейного элемента k12,
поступает на второй вход сумматора 8 (СМ). В результате на выходе сумматора 8 (СМ) формируется напряжение
U8=Um2sin(Ω⋅t)-k9sign(χ).
Разностное напряжение с выхода сумматора 8 (СМ) поступает на управляющий вход инвертора напряжения 10 (ИН).
Инвертор напряжения 10 (ИН) усиливает входной сигнал по мощности и запитывает статорную обмотку 3 вентильного двигателя 1 напряжением
U10=k10[Um2sin(Ω⋅t)-k9sign(χ)],
где k10 - коэффициент передачи инвертора напряжения.
В результате взаимодействия напряжений U6 и U10 в воздушном зазоре двигателя создается качающееся электромагнитное поле, и подвижный элемент вентильного двигателя начинает совершать колебательное движение.
Причем взаимодействие напряжений U6 и U10'=kl0[Um2sin(Ω⋅t)] формирует колебательную составляющую электромагнитного поля, а взаимодействие напряжений U6 и U10''=-k10[k9sign(χ)] формирует позиционное электромагнитное усилие.
Изменяя коэффициент передачи усилителя с регулируемым коэффициентом усиления 9 (У), регулируют величину позиционного электромагнитного усилия, тем самым настраивая для заданной частоты колебаний Ω резонансный режим работы, обеспечивая высокие энергетические показатели вентильного электропривода.
На фиг. 2 представлены временные диаграммы, иллюстрирующие, согласно предложенному устройству, законы изменения момента M(t), координаты χ(t) подвижного элемента вентильного двигателя 1 и токов обмоток 2 и 3 статора i1 и i2. Значения последних в установившемся режиме не превышают своих номинальных значений, что характеризует работу вентильного двигателя 1 с максимальным кпд.
Точность задания и поддержания частоты колебаний Ω определяются стабильностью задающего генератора частоты колебаний 7 (ЗГ). Регулирование амплитуды колебаний χm осуществляется за счет изменения амплитуды выходного напряжения Um2 инвертора напряжения 10 (ИН).
Кроме того, большинство выпускаемых промышленностью вентильных двигателей имеет в своей конструкции уже встроенные датчики положения, что существенно упрощает техническую реализацию вентильного электропривода колебательного движения по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2636806C2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2017 |
|
RU2677682C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2016 |
|
RU2640352C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2015 |
|
RU2592080C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1991 |
|
RU2028026C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ С РЕГУЛИРУЕМЫМ ЗАКОНОМ КОЛЕБАНИЙ | 1993 |
|
RU2072621C1 |
| Вентильный электропривод | 1989 |
|
SU1677838A1 |
Изобретение относится к области электротехники и может быть использовано при создании вибрационных электроприводов для перемешивания сыпучих, пастообразных и жидких веществ, в автоматизированных электроприводах механизмов с колебательным движением рабочего органа, вибрационных установках в горной промышленности, строительстве, машиностроении или сельском хозяйстве. Технический результат: улучшение энергетических показателей электропривода колебательного движения за счет формирования колебательного режима работы в вентильном электродвигателе с регулируемыми выходными параметрами движения и поддержания резонансного режима работы за счет управления собственной частотой. Вентильный электропривод колебательного движения содержит датчик положения, механически соединенный с валом двигателя, усилитель с регулируемым коэффициентом передачи, источник переменного тока и сумматор, соединенный своим выходом с входом инвертора напряжения, выход которого подключен ко второй статорной обмотки двигателя. Первая статорная обмотка вентильного двигателя подключена к выходу фильтра низкой частоты, который соединен своим входом с выходом выпрямителя, вход которого подключен к источнику переменного тока. Выход датчика положения соединен с входом релейного элемента, выход которого подключен к выходу усилителя с регулируемым коэффициентом усиления. Выход задающего генератора частоты колебаний соединен с первым входом сумматора, второй вход которого подключен к выходу усилителя с регулируемым коэффициентом усиления. 2 ил.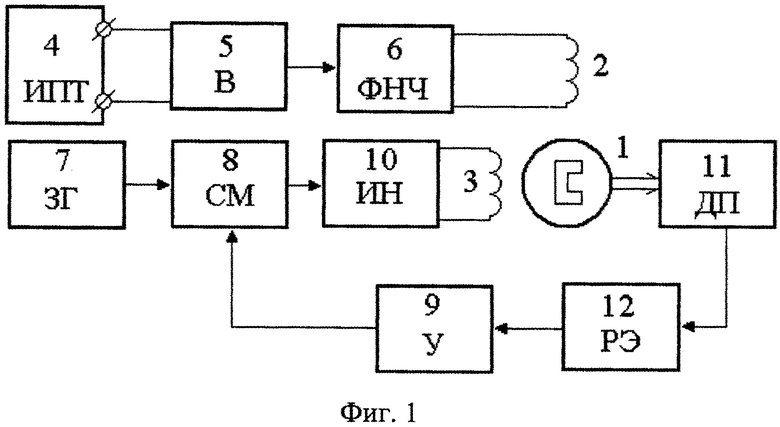
Вентильный электропривод колебательного движения, содержащий датчик положения, механически соединенный с валом двухфазного электродвигателя, усилитель с регулируемым коэффициентом усиления, источник переменного тока и сумматор, соединенный своим выходом с входом инвертора напряжения, выход которого подключен ко второй статорной обмотке двигателя, отличающийся тем, что первая статорная обмотка вентильного двигателя подключена к выходу фильтра низкой частоты, который соединен своим входом с выходом выпрямителя, вход которого подключен к источнику переменного тока, выход датчика положения соединен с входом релейного элемента, выход которого подключен к выходу усилителя с регулируемым коэффициентом усиления, выход задающего генератора частоты колебаний соединен с первым входом сумматора, второй вход которого подключен к выходу усилителя с регулируемым коэффициентом усиления.
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
| Внутрикотловой термохимический водоумягчитель пленочного типа для судовых паровых котлов | 1955 |
|
SU107426A1 |
| Способ трехступенчатой противоточной фильтрации | 1961 |
|
SU145562A1 |
| JP 5791343 B2, 07.10.2015 | |||
| US 2013234642 A1, 12.09.2013 | |||
| УНИВЕРСАЛЬНЫЙ ПРОДУКТ ПИТАНИЯ | 2008 |
|
RU2390999C2 |

