Изобретение относится к транспортным средствам и может быть использовано в двигательных (тяговых) системах для создания тяги автономных объектов, например самолетов, при перемещении в любых средах, в частности в воздушном и космическом пространствах.
Известен способ перемещения объекта в пространстве, включающий в себя отбрасывание с некоторой скоростью части массы объекта [1].
Недостатками этого способа являются большой расход энергии, требуемый для его осуществления, обусловленный малым КПД тепловых движителей, существенная неэкологичность процесса, связанная с необходимостью выброса в окружающую объект среду продуктов сгорания рабочего вещества движителя объекта. Необходимость наличия запаса топлива для осуществления способа перемещения отрицательно сказывается на массовых характеристиках объекта, для которого используется способ.
Известен способ перемещения объекта в пространстве, включающий в себя отбрасывание с некоторой скоростью части массы объекта и использование аэродинамических рулей для управления полетом (воздушно-космический самолет) [2]. Недостатками рассматриваемого способа [2] являются отсутствие эффективной работы аэродинамических рулей в открытом космосе и, хоть с меньшим вкладом, но и все недостатки описанного выше способа перемещения [1].
Известен способ перемещения объекта в пространстве, включающий создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом [3]. Этот способ основан на принципе электромагнитного ускорения внешней среды с дипольной микроструктурой без ее ионизации и может использоваться для создания тяг как на Земле, так и в космосе, но он мало эффективен для создания больших тяг (более кг силы)
Известен способ перемещения объекта в пространстве [4], включающий создание на объекте магнитного поля и перемещение в этом поле тел, механически связанных с объектом, магнитное поле на объекте создают с векторным потенциалом, ориентированным под углом 90°-270° к космологическому векторному потенциалу Аг [4-14], а перемещение тел осуществляют путем придания им непрерывного вращения с регулируемой скоростью вокруг осей, перпендикулярных плоскостям, в которых расположены векторы векторного потенциала магнитного поля объекта и космологического векторного потенциала, причем тела вводят в область пониженных значений потенциала, равного сумме указанных векторных потенциалов.
В результате вследствие непрерывного движения (вращения) перемещаемых тел движущая сила возрастает, эффективность воздействия с ее стороны на перемещаемый объект увеличивается.
К недостаткам этого способа можно отнести следующее: ограниченную область применения, связанную с наличием выбранного направления в пространстве, обусловленного существованием космологического векторного потенциала Аг, необходимость наличия сильного магнитного поля на борту объекта.
Известен способ [15] перемещения объекта в космическом пространстве в окрестности планеты или звезды, не связанного с выбранным направлением в пространстве, включающий перемещение тел внутри объекта, в котором с целью уменьшения энергозатрат, массогабаритных характеристик и расширения области применения на объекте размещают механически связанные с объектом два ротора, один из которых выполнен в виде непрерывного кольца, а второй - основной ротор с дополнительным массивным телом, расположенным на его периферии и с равным по величине, но противоположно направленным гироскопическим моментом по отношению к первому ротору. В процессе реализации способа увеличивают угловую скорость вращения роторов до величины максимального линейного ускорения объекта и фиксируют эту угловую скорость с помощью обратной связи по величине линейного ускорения.
К недостаткам способа следует отнести движение только в космическом пространстве в окрестности планеты или звезды в сторону от них или к ним, незначительную величину тяги, дополнительные энергетические потери, связанные с затратами на вращение ротора, не содержащего дополнительного магнитного тела, а также узость применения данного способа перемещения объекта и значительные массогабаритные размеры, связанные с применением второго ротора, компенсирующего вращательный момент основного ротора.
Известен способ создания тяги, устройство для его осуществления и средство перемещения на их основе [16]. Технический результат в [16] для создания тяги достигается за счет того, что на космическом объекте располагают 2N, где N=1, 2, 3, …, роторов, каждый ротор выполнен с дополнительным массивным телом, размещенным на его периферии, 2N роторов образуют N пар роторов, также на объекте располагают М разгонно-тормозных блоков, жестко закрепленных на корпусе объекта, каждый ротор соединен с Ф, где Ф=3, 4, 5, …, разгонно-тормозных блоков, М=2N×Ф; раскручивают в противоположных направлениях 2 ротора, по крайней мере, одной из N пар роторов, доводят величину угловой скорости вращения роторов ω до значения ωi, где i номер ротора, i=1, 2, 3, … 2N, осуществляют торможение i-го ротора на относительную величину угловой скорости Δωi/ω, определяемую выражением:
Δωi/ω=(ω-ωкон.i)/ω,
где ωкон.i - конечное значение угловой скорости i-го ротора после торможения, влияющее на силу тяги, и находящееся в диапазоне значений 1≥Δωi/ω>0, при этом производят торможение i-го ротора в роторной паре по достижении им значения заданной угловой скорости ωзад.i, определяемой величиной требуемого ускорения объекта атреб. при одном его обороте:
атреб.=Р⋅ωзад.i,
где Р - размерный коэффициент, эмпирически определяемый конструкцией объекта.
Данный способ создания тяги, устройство для его осуществления и средство перемещения близки к поставленной задаче изобретения, но не содержат конкретизированных параметров вращения, остановки и скорости вращения дополнительных тел у роторов, приводящих к максимальным значениям силы, используемой в виде тяги, а средство перемещения может быть использовано только в открытом космосе. При этом предполагается, что первоисточником энергии на борту средства перемещения являются солнечные батареи, которые эффективно работают только в окрестности нашей звезды Солнца. Изобретение [16] и конкретный проект космического корабля на его основе, описанный в [17], может рассматриваться как аналог.
Известен способ получения энергии [18], в частности электроэнергии, который может быть использован для создания электростанций нового поколения. Сущность изобретения [18] заключается в получении электроэнергии, на основе индуктивного способа снятия электроэнергии за счет вращающегося объекта с магнитами на его периферии, перемещении тел внутри объекта, представляющих собой дополнительные массивные тела, расположенные на периферии роторов, объект выбирают в виде кольца, во внутренней его области размещают механически связанные с ним роторы, чтобы плоскость вращения роторов располагалась в плоскости кольца, с дополнительными массивными телами, расположенными на периферии роторов, размещают дополнительные массивные тела в диаметрально противоположных областях, по отношению к центру кольца максимально удаленных от его центра, раскручивают роторы с максимальным ускорением, ограниченным прочностью конструкции, и тормозят ротор в момент прохождения дополнительным массивным телом области, максимально удаленной по отношению к центру кольца, повторяют цикл раскрутки и торможения роторов N раз (N=1, 2, 3 и т.д.) до получения величины мощности выходной электроэнергии, превышающей затраты электрической мощности, необходимой на раскрутку роторов, подключают потребители электроэнергии при N=N+1 обороте роторов. Данный способ получения электроэнергии является уникальным и не имеет аналогов в мире. Изобретение [18] может рассматриваться как один из аналогов рассматриваемого изобретения.
Известен способ и устройство для перемещения в физическом пространстве [19]. Изобретение относится к транспортным средствам и может быть использовано в двигательных (тяговых) системах для перемещения объектов в любых средах, в частности в космическом пространстве.
Сущность изобретения заключается в том, что с целью увеличения тяги, уменьшения энергозатрат, массогабаритных характеристик и расширения области применения на объекте при старте перед началом вращения дополнительные массивные тела, расположенные на периферии у каждого ротора из пары роторов, размещают в противоположных по фазе вращения положениях таким образом, чтобы направление перпендикуляра, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных тел - точки приложения силы, и линией, на которой лежат оси вращения роторов, соответствовало выбранному направлению движения, при этом дополнительные массивные тела не приближают к оси вращения роторов ближе чем на пять сантиметров, используют в качестве источника вращения дополнительных массивных тел шаговые электродвигатели, обеспечивающие минимальное время возврата дополнительного тела в исходное положение, не превышающее одну секунду, с остановкой в этом положении дополнительного массивного тела не менее 0, 01 секунды, повторяют циклы вращений до достижения требуемой скорости объекта.
Техническим результатом изобретения является создание экологически чистого способа перемещения объекта в любых средах при минимальных энергозатратах. Данное изобретение является наиболее близким аналогом к рассматриваемому предложению и может служить в качестве прототипа для предлагаемого способа и устройства. К недостаткам изобретения [19] можно отнести то, что [19] не решает достаточно эффективно с точки зрения минимума энергозатрат задачу автономного функционирования средства перемещения в воздухе, когда аэродинамические силы могут значительно уменьшить энергетические затраты. Предполагается, что в космосе объект [19] функционирует от солнечных батарей. В связи со сказанным снижается эффективная область применения данного изобретения.
Задачами, на решение которых направлено настоящее изобретение являются: устранение отмеченных недостатков и создание экологически чистого автономного способа создания тяги и энерго-двигательного устройства для перемещения объекта в физическом пространстве (в воздухе, космическом пространстве и поверхности планет, в частности Земли) в любую сторону с большей тягой в направлении движения для реализации его аэродинамических качеств при полете в воздушном пространстве, что значительно расширяет область применения настоящего изобретения.
Технические результаты, которые обеспечиваются изобретениями, заключаются в том, что предлагается способ создания тяги и энерго-двигательное устройство для перемещения объекта в пространстве, не связанные с наличием на борту какого-либо обычного топлива, а энерго-двигательное устройство создания тяги, которое реализует максимум электроэнергии от генератора и любой вид перемещения объекта - вперед, назад, вверх, вниз, поворот несущей плоскости, например самолета, по часовой и против часовой стрелки относительно вектора направления движения, имеет максимальное значение времени полета объекта, ограниченное только ресурсом функционирования механических деталей конструкции средства перемещения.
Указанные технические результаты достигаются тем, что в известных технических решениях, связанных с аналогами и выбранным прототипом, - способ создания тяги для перемещения объекта, заключающийся во вращении расположенных на объекте роторов, которые содержат дополнительные массивные тела, размещенные на их периферии, 2N роторов образуют N пар роторов, также на объекте располагают разгонно-тормозные блоки, жестко закрепленные на корпусе объекта, каждый ротор пары соединяют с разгонно-тормозным блоком, роторы пары раскручивают в противоположных направлениях, добиваясь в паре нулевого гироскопического момента, при старте перед началом вращения дополнительные массивные тела, расположенные на периферии у каждого ротора из пары роторов, размещают в противоположных по фазе вращения положениях таким образом, чтобы направление перпендикуляра, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных массивных тел - точки приложения силы, и линией, на которой лежат оси вращения роторов, соответствовало выбранному направлению движения, при этом дополнительные массивные тела не приближают к оси вращения роторов ближе чем на пять сантиметров, используют в качестве источника вращения дополнительных массивных тел разгонно-тормозные блоки, обеспечивающие минимальное время возврата дополнительного массивного тела в исходное положение, не превышающее одну секунду, с остановкой в этом положении дополнительного массивного тела не менее 0,01 секунды, повторяют циклы вращений до достижения требуемой скорости объекта, электроэнергию, идущую на раскручивание роторов, создают индуктивным способом за счет вращающегося кольца с магнитами и индуктивных катушек на корпусе объекта, перемещением тел внутри конструкции кольца, представляющих собой дополнительные массивные тела, расположенные на периферии роторов, размещают роторы так, чтобы плоскость вращения роторов располагалась в плоскости кольца, с дополнительными массивными телами, расположенными на периферии роторов, размещают дополнительные массивные тела в диаметрально противоположных областях, по отношению к центру кольца максимально удаленных от его центра, раскручивают роторы с максимальным ускорением, ограниченным прочностью конструкции, и тормозят ротор в момент прохождения дополнительным массивным телом области, максимально удаленной по отношению к центру кольца, повторяют цикл раскрутки и торможения роторов М раз (М=1, 2, 3 и т.д.) до получения величины мощности выходной электроэнергии, превышающей затраты электрической мощности, необходимой на раскрутку всех роторов, подключают потребители электроэнергии при М=М+1 обороте роторов, на объекте дополнительно создают генератор электрической энергии, имеющий роторы с дополнительными массивными телами, расположенные на периферии у каждого ротора и разгонно-тормозные блоки, жестко закрепленные на корпусе двух колец, имеющих ось вращения, совпадающую с осью вращения динамо-машины и находящуюся в плоскости симметрии объекта, но вращающихся в противоположные стороны, внутри колец располагают крепежную раму, имеющую плоскость симметрии, в которой лежит ось вращения динамо-машины, к крепежной раме присоединяют блоки в виде полых цилиндров с параллельными осями симметрии, на которых внутри крепят более одной пары роторов с дополнительными массивными телами так, чтобы ось вращения роторов была параллельна оси цилиндра, а плоскость. перпендикулярная оси цилиндра блока, была параллельна плоскости симметрии объекта.
В частных случаях и в конкретных формах выполнения изобретение характеризуется следующими признаками:
- магниты на кольце у генератора электрической энергии и катушки на корпусе объекта - космического самолета, располагают на расстоянии L=V×T друг от друга по дуге кольца и дуге, соответствующей окружности на корпусе объекта, где V - оптимальная скорость вращения ротора генератора для получения максимума электроэнергии, а Т - период вращения дополнительного массивного тела у роторов генератора.
- обеспечивают синхронизацию момента прохождения магнитами ротора катушек статора генератора с моментом прохождения дополнительными массивными телами роторов генератора области их круговой траектории движения, предшествующей их остановке от 5° до 25°.
- обеспечивают нулевой гироскопический момент у пары вращающихся колец генератора.
- создают разгонно-тормозные блоки на основе сервомоторов.
Сущность заявленного предложения заключается в том, что на объекте дополнительно создают генератор электрической энергии, имеющий роторы с дополнительными массивными телами, расположенные на периферии у каждого ротора, и разгонно-тормозные блоки, жестко закрепленные на корпусе двух колец, имеющих ось вращения, совпадающую с осью вращения динамо-машины и находящуюся в плоскости симметрии объекта, но вращающихся в противоположные стороны, который позволяет автономно функционировать объекту практически неограниченное время и в воздухе и в открытом космосе, и при этом увеличить тягу в направлении выбранного вектора движения при уменьшении энергозатрат и расширении области применения объекта.
Расположение магнитов на кольце у генератора электрической энергии и катушек на корпусе объекта на расстоянии L=V×T друг от друга по дуге кольца и дуге соответствующей окружности на корпусе объекта, где V - оптимальная скорость вращения ротора генератора для получения максимума электроэнергии, а Т - период вращения дополнительного массивного тела у роторов генератора, позволяет реализовать максимум величины силы, действующей на дополнительное массивное тело роторов в момент прохождения магнитами катушек статора т.е. тогда, когда электромагнитное взаимодействие между ними максимально по Фарадею. Последнее позволяет оторвать магниты от катушек оптимальным образом, когда новая сила тяги F является максимальной. Эксперименты показали, что при подлете дополнительного тела к месту его предыдущей остановки от 5° до 25° сила тяги в десятки раз больше, чем в среднем за оборот [20]. Вследствие сказанного, эффективность производства электроэнергии генератором будет максимальна.
Поскольку в заявке рассматривается автономный объект типа самолета, то на его борту необходимо обеспечивать нулевой гироскопический момент у пары вращающихся колец генератора, чтобы не было закрутки самого объекта.
В настоящее время разгонно-тормозные блоки на основе сервомоторов обеспечивают на много более быстрое перемещение дополнительных массивных тел, чем шаговые двигатели, поэтому предлагается использовать сервомоторы для вращения роторов [21].
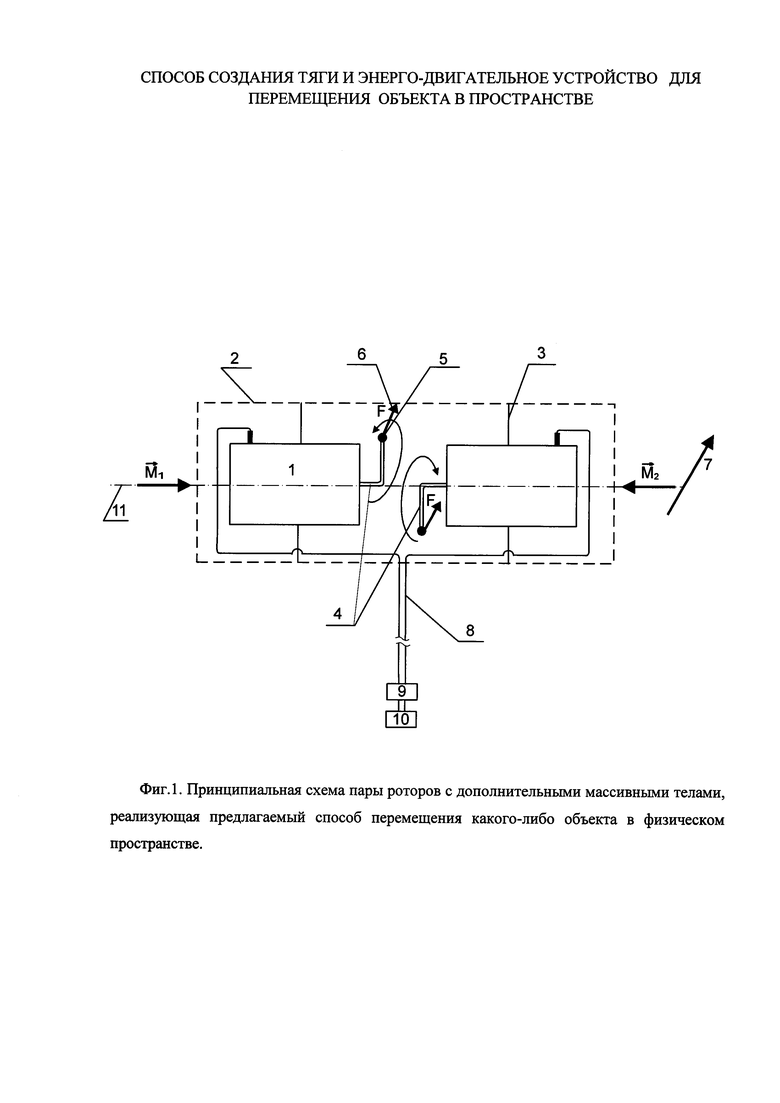
На фиг. 1 приведена принципиальная схема пары роторов с дополнительными массивными телами, реализующая предлагаемый способ перемещения какого-либо объекта в физическом пространстве.
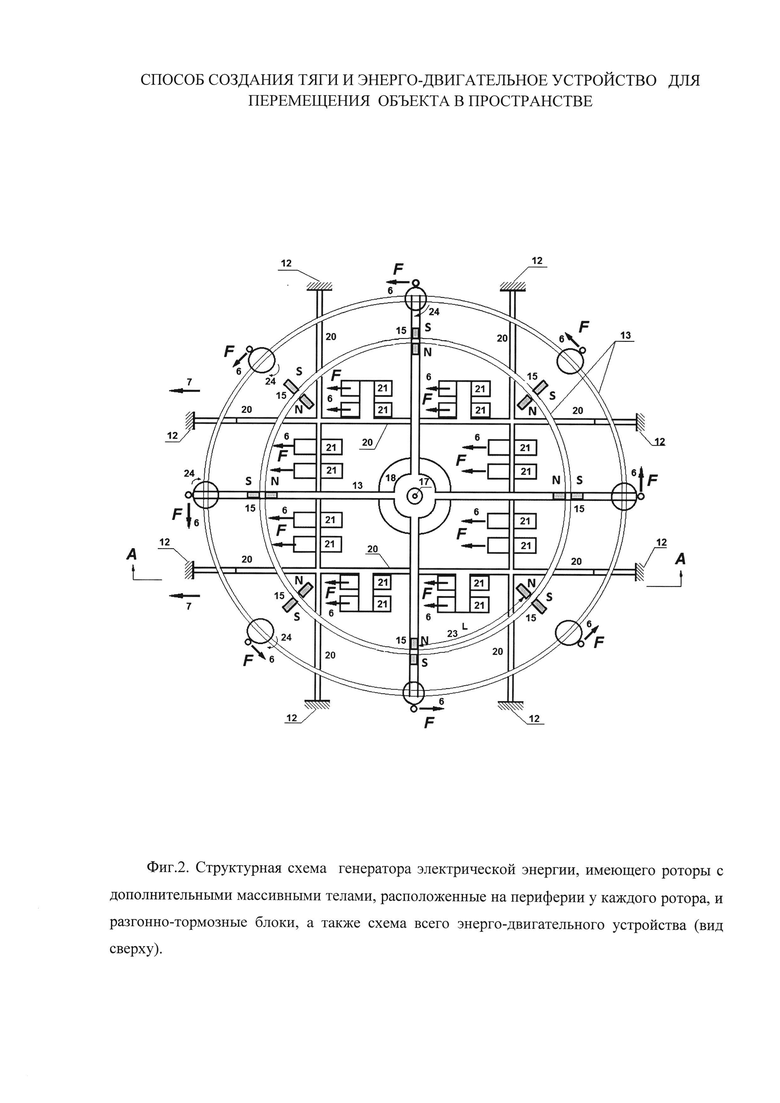
На фиг. 2 представлена структурная схема генератора электрической энергии, имеющего роторы с дополнительными массивными телами, расположенные на периферии у каждого ротора и разгонно-тормозные блоки, а также схема всего энерго-двигательного устройства (вид сверху).
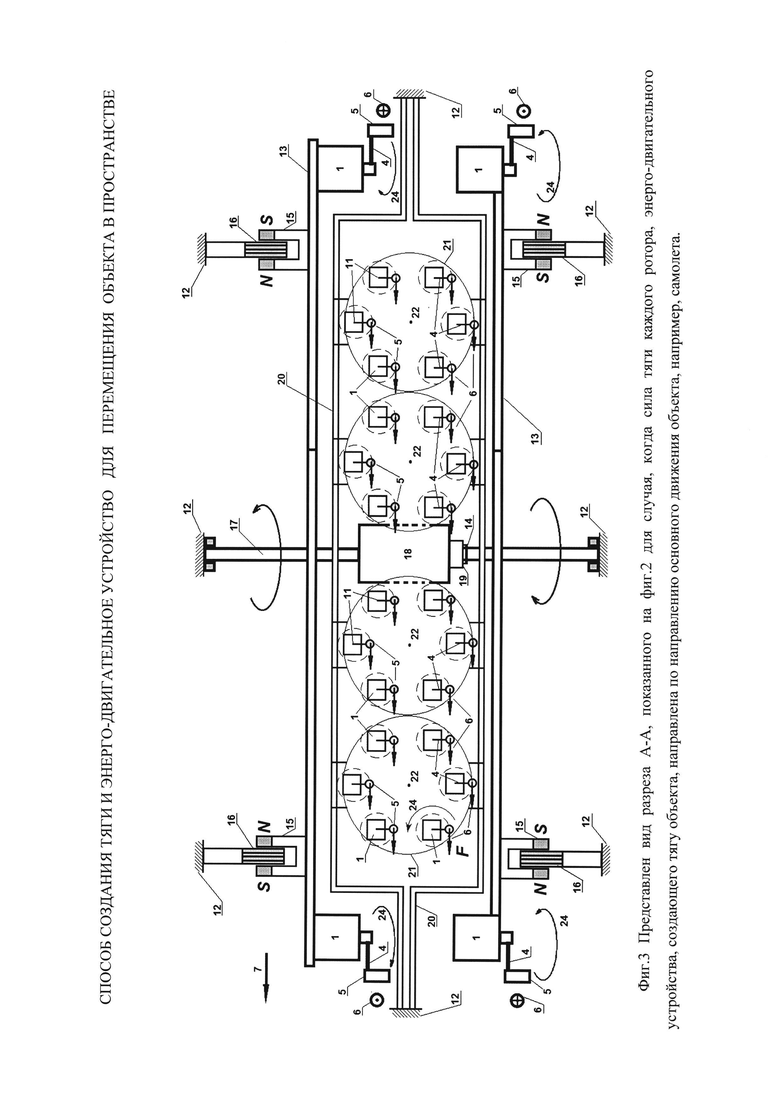
На фиг. 3 качественно представлен вид разреза А-А, показанного на фиг. 2, для случая, когда сила тяги каждого ротора, энерго-двигательного устройства, создающего тягу объекта, направлена по направлению основного движения объекта, например самолета.
На фиг. 4 представлены варианты остановки при вращении дополнительных массивных тел для реализации направления силы тяги в горизонтальном и вертикальном направлениях.
На фиг. 5 показана схема обкатки дополнительным массивным телом концентрического цилиндра с выточкой в месте остановки дополнительного массивного тела.
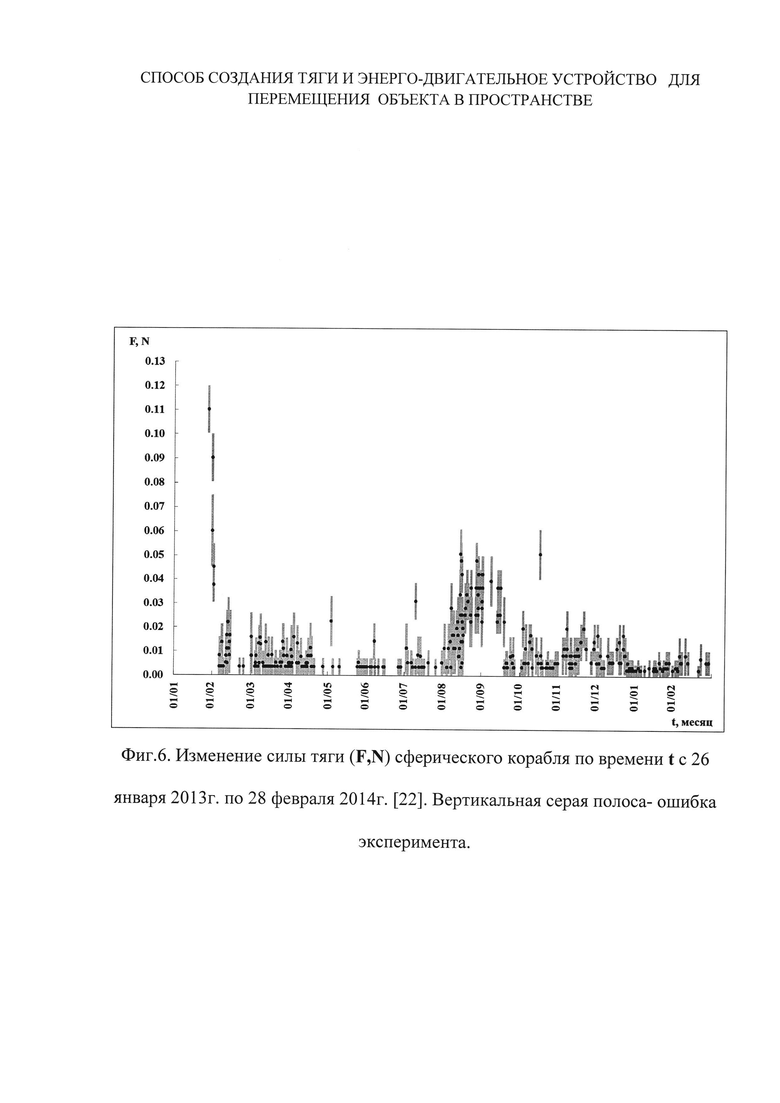
На фиг. 6. показаны результаты непрерывного эксперимента в Италии с 26 января 2013 г. по 28 февраля 2014 г. [22] по исследованию использования новой силы природы для получения тяги движителя.
На фиг. 1-6 и в тексте приняты следующие обозначения:
1 - разгонно-тормозные блоки на основе сервомоторов;
2 - часть корпуса блока полых цилиндров;
3 - крепежная арматура;
4 - ротор с дополнительным массивным телом;
5 - дополнительное массивное тело (место расположения центра - место приложения новой силы F);
6 - направление действия новой силы F;
7 - направление перемещения объекта - направление перпендикуляра, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных массивных тел 5 в паре тел (точки приложения силы), и линией, на которой лежат оси вращения роторов (11);
8 - система проводов;
9 - источник питания разгонно-тормозных блоков на основе сервомоторов тяговой системы;
10 - блок управления разгонно-тормозными блоками тяговой системы на основе сервомоторов;
11 - ось, на которой лежат оси вращения роторов и разгонно-тормозных блоков на основе сервомоторов (M1 и М2 - направления кинетических моментов сервомоторов) тяговой системы.
12 - корпус объекта;
13 - кольцо генератора;
14 -тормозное устройство;
15 - магниты;
16 - индуктивные катушки статора генератора;
17 - ось вращения колец генератора, совпадающая с осью вращения динамо-машины;
18 – динамо-машина;
19 - редуктор;
20 - крепежная рама;
21 - полые цилиндры;
22 - ось симметрии полых цилиндров;
23 - расстояние по дуге (L);
24 - направление собственного вращения дополнительного массивного тела;
25 -концентрический цилиндр;
26 - выточка.
Энерго-двигательное устройство для создания тяги (фиг. 2, 3) содержит корпус объекта 12, роторы 4 с дополнительными массивными телами 5, размещенными на периферии роторов, 2N роторов объединены в N пар роторов (фиг. 1), на объекте расположены разгонно-тормозные блоки 1, жестко закрепленные на корпусе объекта 12, каждый ротор пары соединен с разгонно-тормозным блоком 1, роторы пары раскручены в противоположных направлениях, добиваясь в паре нулевого гироскопического момента, при старте перед началом вращения дополнительные массивные тела, расположенные на периферии у каждого ротора из пары роторов, размещены в противоположных по фазе вращения положениях таким образом, чтобы направление перпендикуляра 7, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных тел 5, и линией, на которой лежат оси вращения роторов 11, соответствовало выбранному направлению движения объекта 7, при этом дополнительные массивные тела 5 не приближены к оси вращения роторов 11 ближе чем на пять сантиметров, использованы в качестве источника вращения дополнительных массивных тел 5 разгонно-тормозные блоки 1, обеспечивающие минимальное время возврата дополнительного массивного тела в исходное положение, не превышающее одну секунду, с остановкой в этом положении дополнительного массивного тела не менее 0, 01 секунды, генератор электрической энергии, имеющий вращающееся кольцо 13 с магнитами 15 и индуктивные катушки 16 на корпусе объекта 12, дополнительные массивные тела 5, расположенные на периферии роторов 4 установленных на кольце 13, которые размещены так, чтобы плоскость вращения роторов 4 располагалась в плоскости кольца 13, при старте размещены дополнительные массивные тела 5 у роторов 4 в диаметрально противоположных областях, по отношению к центру кольца 13 максимально удаленных от его центра, раскручены роторы 4 с максимальным ускорением, ограниченным прочностью конструкции, торможение роторов 4 проведено в момент прохождения дополнительными телами области, максимально удаленной по отношению к центру кольца 13, генератор электрической, имеющий роторы 4 с дополнительными массивными телами 5, расположенными на периферии у каждого ротора 5, и разгонно-тормозные блоки 1, жестко закрепленные на корпусе двух колец 13, имеющих ось вращения 17, совпадающую с осью вращения динамо-машины 18, имеющей редуктор 19 и тормозное устройство 14, и находящуюся в плоскости симметрии объекта, но вращающихся в противоположные стороны, внутри колец 13, между кольцами расположена крепежная рама 20, имеющая плоскость симметрии, в которой лежит ось вращения динамо-машины 17, к крепежной раме присоединены блоки в виде полых цилиндров 21 с параллельными осями симметрии 22, на которых внутри установлены более одной пары роторов 4 с дополнительными массивными телами 5 так, чтобы ось вращения роторов 11 была параллельна оси цилиндра 21, а плоскость, перпендикулярная оси цилиндра 22 блока, была параллельна плоскости симметрии объекта.
В частных случаях и в конкретных формах выполнения изобретения энерго-двигательное устройство характеризуется следующими признаками:
- магниты 15 (фиг. 2, 3) на кольце 13 у генератора электрической энергии и катушки статора 16 генератора на корпусе объекта 12 расположены на расстоянии L=V×T 23 друг от друга по дуге кольца и дуге соответствующей окружности на корпусе объекта, где V - оптимальная скорость вращения ротора генератора для получения максимума электроэнергии, а Т - период вращения дополнительного массивного тела 5 у роторов генератора;
- синхронизированы моменты прохождения магнитами 15 ротора индуктивных катушек 16 статора генератора с моментами прохождения дополнительными массивными телами 5 роторов 4 генератора области их круговой траектории движения, предшествующей их остановке от 5° до 25°;
- обеспечен нулевой гироскопический момент у пары вращающихся колец генератора;
- дополнительные тела 5 роторов 4 в процессе вращения обкатывают концентрический цилиндр 25 с внутренней его стороны.
- в концентрическом цилиндре 25 в месте остановки дополнительного массивного тела существует выточка 26, обеспечивающая вращение дополнительного массивного тела вокруг собственной оси вращения в месте его остановки в процессе остановки вращения ротора.
- созданы разгонно-тормозные блоки на основе сервомоторов.
Энерго-двигательное устройство работает следующим образом.
Электроэнергия от заранее заряженного аккумулятора поступает на разгонно-тормозные блоки, жестко закрепленные на корпусе двух колец 13 генератора, которые начинают вращать роторы 4 с дополнительными массивными телами 5, расположенными на максимально удаленном расстоянии от оси вращения колец 13, обеспечивая минимальное время возврата дополнительного массивного тела в исходное положение с остановкой в этом положении дополнительного тела не менее 0, 01 секунды, создавая тем самым новую силу природы F 6, вращающую кольца 13 в противоположных направлениях, кольца вращают динамо-машину 18, от которой электроэнергия поступает снова в аккумулятор, дополнительная энергия поступает в аккумулятор при пересечении магнитами 15, закрепленными на кольцах 13 ротора генератора, индуктивных катушек 16 статора генератора, установленных на корпусе объекта 12. Используя редуктор 19 и тормозное устройство 14, обеспечивается нулевой гироскопический момент для пары колец генератора. Электроэнергия от аккумулятора поступает на разгонно-тормозные блоки 1, жестко закрепленные на полых цилиндрах 21, установленных на крепежной раме 20, расположенной между кольцами 13 ротора генератора. Эти разгонно-тормозные блоки 1 вращают роторы 4 с дополнительными массивными телами 5, которые останавливаются в положении, обеспечивающем нужное направление тяги объекта на поверхности земли, в воздухе или космическом пространстве.
На фиг. 4 представлены варианты остановки при вращении дополнительных массивных тел 5 для реализации направления силы тяги F 6 в горизонтальном и вертикальном направлениях. Например, при осуществлении направления действия силы тяги вверх справа от плоскости симметрии объекта и направления его движения и вниз слева от плоскости симметрии объекта и направления его движения мы получим вращение объекта относительно направления его движения.
На фиг. 3 представлен случай, когда сила тяги каждого ротора, энерго-двигательного устройства, создающего тягу объекта, направлена по направлению основного движения, например, самолета (например, случай старта объекта с поверхности Земли.)
Аккумулятор на фиг. 2, 3 не показан и поэтому не имеет номера, так как для понимания сущности заявленного предложения его изображение на фигурах не обязательно.
На фиг. 5 показана схема обкатки дополнительным массивным телом концентрического цилиндра с выточкой в месте остановки дополнительного массивного тела. Как показали эксперименты, при остановке массивного тела в нужной точке траектории, но с сохранением вращения вокруг собственной оси, сила возрастает. Поэтому в месте остановки массивного тела сделана выточка в концентрическом цилиндре. При этом концентрический цилиндр компенсирует центробежную силу и значительно уменьшает нагрузку на подшипники сервомоторов, уменьшая их энергопотребление и увеличивая их ресурс работы.
Многолетние наземные экспериментальные исследования предложенного способа создания тяги и устройства для его осуществления подтвердили реализуемость заложенных в изобретении физических принципов.
Приведем результаты только двух работ [22, 23].
В [5, 20, 22, 23] описан новый принцип перемещения космических аппаратов (КА) в космическом пространстве, основанный на использовании физического пространства (темной материи) в качестве опорной среды. Т.е. КА не будут использовать топливо и реактивный принцип движения для своего перемещения, а будет применять принцип перемещения автомобиля, который отталкивается от Земли за счет силы трения. Таким образом, КА будет обмениваться импульсом с физическим пространством, отталкиваясь от него, используя новую силу природы.
В [22, 23] показано, что любое тело за счет воздействия потенциалов физических полей элементарных частиц уменьшает величину модуля A∑ в месте своего расположения в физическом пространстве. Данное объемное изменение A∑ называется информационным образом (ИО) объекта и характерно только для данного тела, так как кодируется коэффициентами λi (i=1, 2, 3 …), входящими в сложный ряд по изменению A∑ за счет потенциалов полей данного тела. Поскольку в месте расположения ИО величина A∑ уменьшена, то, если тело в процессе своего движения вернется к своему ИО, данное место физического пространства будет отталкивать его за счет действия новой силы природы. Последнее можно использовать для получения тяги любых объектов, например самолетов или КА.
На фиг. 6. показаны результаты непрерывного эксперимента в Италии с 26 января 2013 г. по 28 февраля 2014 г. [22] по исследованию использования новой силы природы для получения тяги движителя, который в перспективе может быть применен для перемещения КА. Модель движителя устанавливалась на сферическом корабле диаметром около 1 м, для обеспечения равенства сил трения о воду в разных направлениях. Механическое устройство движителя описано в [23]. На борту корабля в вертикальной плоскости вращался груз массой 526 г. С 26 января по 27 июня 2013 г. период вращения груза был равен 0,22 с, при этом груз останавливался в нижней точке своей траектории на 0.12 с для создания ИО. С 28 июня и до конца опыта период вращения груза был равен 0,3 с, время остановки 0,3 с. При подлете груза к ИО возникала импульсная тяга, которая изменялась по времени суток и сезона года при постоянных внешних условиях. Результаты эксперимента для средней по обороту силы тяги показаны на фиг. 6. В [23] отмечено, что величина силы сильно растет с уменьшением периода вращения, поэтому при анализе графика нужно учитывать, что величина силы в период с 26 января по 27 июня 2013 г завышена примерно в два раза. Большие значение силы в начале непрерывного эксперимента авторы связывают с завершением процесса изменения направления дипольной компоненты магнитного поля Солнца. Как видно из графика, в районе 6 февраля наблюдается резкое уменьшение силы тяги, которое продолжается, за исключением некоторых выбросов, до 6 августа. В [23] данное явление подробно объясняется за счет эффекта изменения времени существования ИО в физическом пространстве в зависимости от движения корабля вдоль вектора Аг в течение полугода и против направления к данному вектору - вторая половина года. Последнее дало возможность определить координату глобальной анизотропии (α ≈ 316°±5°) с более высокой точностью. Необходимо отметить, что данный движитель не использует никакого топлива, а его удельное энергопотребление равно около 3 Вт/г, что примерно в 40 раз лучше, чем у самых лучших электрических двигателей для КА [22, 23].
Обобщение результатов опытов показало, что сила F возрастает с уменьшением времени возврата груза в исходное положение, а при одном и том же времени возврата в исходное положение возрастает с увеличением массы груза.
Для технического применения сложное выражение для новой силы [5, 6, 9], имеющей нелинейный и нелокальный характер, можно представить в виде:
F=C×Δtk×m,
где С - коэффициент соответствующий ИО данного массивного тела (С у всех тел разный и определяется экспериментальным путем);
Δt - время возврата тела в исходное положение,
k определяется экспериментально, но в проведенных экспериментах k ≈ -1;
m - масса тела.
Проведенные эксперименты показали, что при быстром вращении массивных тел с массой 2 кг и ближе к 10 кг эффект влияния глобальной анизотропии в виде сноса объекта от его курса, связанный с вектором Аг, исчезает. Последнее аналогично сравнению вертикального падения пера, а также камня с башни. Перо смещается в сторону ветра (аналог вектора Аг) даже при очень слабом ветре, а массивный камень практически не смещается.
Таким образом, совокупность проведенных экспериментов подтвердили положения, выдвинутые к патентованию в данном изобретении.
Источники информации
1. Исследование ракетных двигателей на жидком топливе // Пер. с англ., под ред. В.А. Ильинского / М., Мир, 1964).
2. В. Лукашевич, И. Афанасьев, "Космические крылья", М.: ООО "ЛенТа странствий", 2009. - 496 с.
3. Астронавтика и ракетодинамика, Экспресс-информация // ВИНИТИ, М., 1981, №39, с. 22-24).
4. Бауров Ю.А, Огарков В.М. Способ перемещения объекта в пространстве // Патент №2082900 от 27.06.97 г.
5. Бауров Ю.А. «Структура физического пространства и новый способ получения энергии (теория, эксперимент, прикладные вопросы)» М., "Кречет", 1998, 240 с.
6. Baurov Yu. A. Global Anisotropy of Physical Space. Experimental and Theoretical Basis. Nova Science, NY, 2004.
7. Бауров Ю.А., Клименко Е.Ю., Новиков СИ. «Экспериментальное наблюдение магнитной анизотропии пространства» ДАН СССР, 1990, т. 315, №5, с. 1116.
8. Yu.A. Baurov, E.Yu. Klimenko, S.I. Novikov ((Experimental observation of Space magnetic anisotropy" Phys. Lett. A v. 162, 1992, p. 32.
9. Yu.A. Baurov "Space magnetic anisotropy and a new interaction in nature" Phys. Lett. A v. 181, (1993) p. 283.
10. Ю.А. Бауров, В.Л. Шутов «О влиянии векторного магнитного потенциала Земли и Солнца на скорость β-распада», Прикладная физика, 1995, №1, с. 40.
11. Baurov Yu.A., Konradov А.А., Kuznetsov E.A., Kushniruk V.F., Ryabov Y.B., Senkevich A.P., Sobolev Yu.G., Zadorozsny S. "Experimental Investigations of Changes in β-Decay rate of 60Co and 137Cs" Mod. Phys. Lett A. v. 16, N 32 (2001), p. 2089.
12. Ю.А Бауров, Ю.Г. Соболев, Ю.В. Рябов, В.Ф. Кушнирук, «Экспериментальные исследования изменений скорости β-распада радиоактивных элементов.», Ядерная физика, 70, 1875, (2007).
13. Бауров Ю.А. «Анизотропное явление в бета-распаде радиоактивных элементов и в других процессах природы», Известия РАН, Серия физическая, 2012, том 76, №4, стр. 549-553.
14. Yu.A. Baurov, I.B. Timofeev, V.A. Chernikov, S.F. Chalkin, A.A. Konradov., Experimental Investigation of the Distribution of Pulsed-plasma-generator at its Various Spatial Orientation and Global Anisotropy of Space. Phys. Lett. A, V. 311, (2003), p. 512.
15. Бауров Ю.А., Бауров А.Ю. «Способ перемещения объекта в космическом пространстве», патент РФ №2338669 с приоритетом от 25.01.2007.
16. Бауров Ю.А., Бауров А.Ю. Бауров А.Ю. (мл.), Репченков P.O. «Способ создания тяги, устройство для его осуществления и средство перемещения», патент РФ №2448023 с приоритетом от 27.04.2010.
17. Y.A. Baurov, L. Albanese, F. Meneguzzo, V.A. Menshikov, Universal propulsion harnessing the global anisotropy of the physical space, Am. J. Mod. Phys. 2 (2013) 383-391.
18. Yu.A. Baurov, F. Meneguzzo, A.Yu. Baurov, A.Yu. Baurov (Ju.) "Metodo e apparato per la produzione di elettricita", Patent of Italy N0 FI2012A000185 from 19.09.2012.
19. Yu.A. Baurov, F. Meneguzzo, A.Yu. Baurov, A.Yu. Baurov (Ju.) "Un dispositivo di propulsione del tipo rotativo che genera una forza di spinta lineare impulsiva" Patent of Italy N0 FI2012A000130 from 21.06.2012.
20. Бауров Ю.А., Менегуццо Ф. Новое транспортное средство: скутер для перемещения космонавтов в космическом пространстве. Магнитолевитационные транспортные системы и технологии МТСТ'14, Труды 2-й Международной научной конференции Санкт-Петербург, 17-20 июня 2014 года. Санкт-Петербург, 2014 г.
21. Проектирование шагового электропривода применительно к робототехнике. Под редакцией Садовского Л.А., 1985 г.
22. Ю.А. Бауров, Ю.Г. Соболев, Ф. Менегуццо, «Фундаментальные эксперименты по обнаружению анизотропии физического пространства и их возможная интерпретация», Известия РАН. Серия физическая, 2015, том 79, №7, с. 1047-1052.
23. Yuriy Alexeevich Baurov, Francesco Meneguzzo, Lorenzo Albanese. Experimental Investigation of the Traction Force for a New Space Thruster. American Journal of Astronomy and Astrophysics. Special Issue: Global Anisotropy, Theory of Byuon, New Force, New Power System, Propulsion, Space Flights. Vol. 2, No. 2, 2014, pp. 40-46. doi: 10.11648/j.ajaa.s.20140202.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ТЯГИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СРЕДСТВО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2448023C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2338669C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2091976C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2652666C2 |
| СПОСОБ ГЕНЕРИРОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121602C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ ЭНЕРГИИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2251629C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147696C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 1992 |
|
RU2082900C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2106748C1 |


Группа изобретений относится к двигательным и энергосистемам транспортных средств (объектов), перемещающихся в любых средах, в т.ч. в воздушно-космическом пространстве. На объекте, взаимодействующем с физическими полями пространства, дополнительно создают генератор электроэнергии (ГЭ), имеющий роторы с дополнительными периферийными массивными телами (РМТ), и разгонно-тормозные блоки, закрепленные на корпусе двух колец, взаимно противоположно вращающихся (с нулевым гироскопическим моментом) соосно валу динамо-машины. Внутри колец на крепежной раме установлены блоки в виде полых цилиндров с параллельными осями симметрии. Внутри них крепят несколько пар РТМ с осями вращения, параллельными оси цилиндра. Все блоки размещены определённым образом по отношению к плоскости симметрии объекта. Магнитные и индуктивные элементы ГЭ располагают в зависимости от оптимальной (по максим. электроэнергии) скорости вращения ротора ГЭ. Синхронизируют моменты прохождения магнитами ротора ГЭ катушек статора ГЭ с моментами прохождения массивными телами РТМ областей их торможения. Техническими результатами изобретений являются возможность автономной работы объекта, увеличение его тяги в выбранном направлении, уменьшение энергозатрат и расширение области применения. 2 н. и 10 з.п. ф-лы, 6 ил.
1. Способ создания тяги для перемещения объекта, заключающийся во вращении расположенных на объекте роторов, которые содержат дополнительные массивные тела, размещенные на их периферии, 2N роторов образуют N пар роторов, также на объекте располагают разгонно-тормозные блоки, жестко закрепленные на корпусе объекта, каждый ротор пары соединяют с разгонно-тормозным блоком, роторы пары раскручивают в противоположных направлениях, добиваясь в паре нулевого гироскопического момента, при старте перед началом вращения дополнительные массивные тела, расположенные на периферии у каждого ротора из пары роторов, размещают в противоположных по фазе вращения положениях таким образом, чтобы направление перпендикуляра, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных массивных тел - точки приложения силы, и линией, на которой лежат оси вращения роторов, соответствовало выбранному направлению движения, при этом дополнительные массивные тела не приближают к оси вращения роторов ближе чем на пять сантиметров, используют в качестве источника вращения дополнительных массивных тел разгонно-тормозные блоки, обеспечивающие минимальное время возврата дополнительного массивного тела в исходное положение, не превышающее одну секунду, с остановкой в этом положении дополнительного тела не менее 0,01 секунды, повторяют циклы вращений до достижения требуемой скорости объекта, электроэнергию, идущую на раскручивание роторов, создают индуктивным способом за счет вращающегося кольца с магнитами и индуктивных катушек на корпусе объекта, перемещением тел внутри конструкции кольца, представляющих собой дополнительные массивные тела, расположенные на периферии роторов, размещают роторы так, чтобы плоскость вращения роторов располагалась в плоскости кольца, с дополнительными массивными телами, расположенными на периферии роторов, размещают дополнительные массивные тела в диаметрально противоположных областях по отношению к центру кольца максимально удаленных от его центра, раскручивают роторы с максимальным ускорением, ограниченным прочностью конструкции, и тормозят ротор в момент прохождения дополнительным массивным телом области, максимально удаленной по отношению к центру кольца, повторяют цикл раскрутки и торможения роторов М раз (М=1, 2, 3 и т.д.) до получения величины мощности выходной электроэнергии, превышающей затраты электрической мощности, необходимой на раскрутку всех роторов, подключают потребители электроэнергии при М=М+1 обороте роторов, отличающийся тем, что с целью автономной работы объекта, увеличения тяги в направлении выбранного вектора движения, уменьшения энергозатрат и расширения области применения на объекте создают генератор электрической энергии, имеющий роторы с дополнительными массивными телами, расположенные на периферии у каждого ротора и разгонно-тормозные блоки, жестко закрепленные на корпусе двух колец, имеющих ось вращения, совпадающую с осью вращения динамо-машины и находящуюся в плоскости симметрии объекта, но вращающихся в противоположные стороны, внутри колец располагают крепежную раму, имеющую плоскость симметрии, в которой лежит ось вращения динамо-машины, к крепежной раме присоединяют блоки в виде полых цилиндров с параллельными осями симметрии, на которых внутри крепят более одной пары роторов с дополнительными массивными телами так, чтобы ось вращения роторов была параллельна оси цилиндра, а плоскость, перпендикулярная оси цилиндра блока, была параллельна плоскости симметрии объекта.
2. Способ по п. 1, отличающийся тем, что магниты на кольце у генератора электрической энергии и индуктивные катушки статора генератора на корпусе объекта располагают на расстоянии L=V×T друг от друга по дуге кольца и дуге соответствующей окружности на корпусе объекте, где V - оптимальная скорость вращения ротора генератора для получения максимума электроэнергии, а Т - период вращения дополнительного массивного тела у роторов генератора.
3. Способ по п. 2, отличающийся тем, что обеспечивают синхронизацию момента прохождения магнитами ротора индуктивных катушек статора генератора с моментом прохождения дополнительными массивными телами роторов генератора области их круговой траектории движения, предшествующей их остановке от 5° до 25°.
4. Способ по п. 1, отличающийся тем, что обеспечивают нулевой гироскопический момент у пары вращающихся колец генератора.
5. Способ по п. 1, отличающийся тем, что создают разгонно-тормозные блоки на основе сервомоторов.
6. Энерго-двигательное устройство для создания тяги, содержащее корпус объекта, роторы с дополнительными массивными телами, размещенными на периферии роторов, 2N роторов объединены в N пар роторов, на объекте расположены разгонно-тормозные блоки, жестко закрепленные на корпусе объекта, каждый ротор пары соединен с разгонно-тормозным блоком, роторы пары раскручены в противоположных направлениях, добиваясь в паре нулевого гироскопического момента, при старте перед началом вращения дополнительные массивные тела, расположенные на периферии у каждого ротора из пары роторов, размещены в противоположных по фазе вращения положениях таким образом, чтобы направление перпендикуляра, проведенного к плоскости, образованной линией, соединяющей центры масс дополнительных массивных тел, и линией, на которой лежат оси вращения роторов, соответствовало выбранному направлению движения объекта, при этом дополнительные массивные тела не приближены к оси вращения роторов ближе чем на пять сантиметров, использованы в качестве источника вращения дополнительных массивных тел разгонно-тормозные блоки, обеспечивающие минимальное время возврата дополнительного массивного тела в исходное положение, не превышающее одну секунду, с остановкой в этом положении дополнительного массивного тела не менее 0,01 секунды, генератор электрической энергии, имеющий вращающееся кольцо с магнитами и индуктивные катушки на корпусе объекта, дополнительные массивные тела, расположенные на периферии роторов, установленных на кольце, которые размещены так, чтобы плоскость вращения роторов располагалась в плоскости кольца, при старте размещены дополнительные массивные тела у роторов в диаметрально противоположных областях, по отношению к центру кольца максимально удаленных от его центра, раскручены роторы с максимальным ускорением, ограниченным прочностью конструкции, торможение роторов проведено в момент прохождения дополнительными массивными телами области, максимально удаленной по отношению к центру кольца, отличающееся тем, что с целью автономной работы объекта, увеличения тяги в направлении выбранного вектора движения, уменьшения энергозатрат и расширения области применения на объекте создан генератор электрической энергии, имеющий роторы с дополнительными массивными телами, расположенными на периферии у каждого ротора, и разгонно-тормозные блоки, жестко закрепленные на корпусе двух колец, имеющих ось вращения, совпадающую с осью вращения динамо-машины, имеющей редуктор и тормозное устройство, и находящуюся в плоскости симметрии объекта, но вращающихся в противоположные стороны, внутри колец, между кольцами расположена крепежная рама, имеющая плоскость симметрии, в которой лежит ось вращения динамо-машины, к крепежной раме присоединены блоки в виде полых цилиндров с параллельными осями симметрии, на которых внутри установлены более одной пары роторов с дополнительными массивными телами так, чтобы ось вращения роторов была параллельна оси цилиндра, а плоскость, перпендикулярная оси цилиндра блока, была параллельна плоскости симметрии объекта.
7. Энерго-двигательное устройство по п. 6, отличающееся тем, что магниты на кольце у генератора электрической энергии и индуктивные катушки статора генератора на корпусе объекта расположены на расстоянии L=V×T друг от друга по дуге кольца и дуге, соответствующей окружности на корпусе объекта, где V - оптимальная скорость вращения ротора генератора для получения максимума электроэнергии, а Т - период вращения дополнительного массивного тела у роторов генератора.
8. Энерго-двигательное устройство по п. 7, отличающееся тем, что синхронизированы моменты прохождения магнитами ротора индуктивных катушек статора генератора с моментами прохождения дополнительными массивными телами роторов генератора области их круговой траектории движения, предшествующей их остановке от 5° до 25°.
9. Энерго-двигательное устройство по п. 6, отличающееся тем, что обеспечен нулевой гироскопический момент у пары вращающихся колец генератора.
10. Энерго-двигательное устройство по п. 6, отличающееся тем, что дополнительные массивные тела роторов в процессе вращения обкатывают концентрический цилиндр с внутренней его стороны.
11. Энерго-двигательное устройство по п. 10, отличающееся тем, что в концентрическом цилиндре в месте остановки дополнительного массивного тела существует выточка, обеспечивающая вращение дополнительного массивного тела вокруг собственной оси вращения в месте его остановки в процессе остановки вращения ротора.
12. Энерго-двигательное устройство по п. 6, отличающееся тем, что созданы разгонно-тормозные блоки на основе сервомоторов.
| IT FI20120130 A1, 22.12.2013 | |||
| СПОСОБ СОЗДАНИЯ ТЯГИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СРЕДСТВО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2448023C2 |
| RU 2055236 C1, 27.02.1996 | |||
| WO 9529530 A1, 02.11.1995 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 1992 |
|
RU2082900C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В КОСМИЧЕСКОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2338669C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2023203C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКОЙ ЭНЕРГИИ (ВАРИАНТЫ) | 1996 |
|
RU2132109C1 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2651388C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ВОСПРОИЗВОДСТВА ИКРЫ И ЧИСЛЕННОСТИ ОСЕТРООБРАЗНЫХ РЫБ | 2004 |
|
RU2262844C1 |

